JP6014366B2 - Shelf equipment - Google Patents
Shelf equipment Download PDFInfo
- Publication number
- JP6014366B2 JP6014366B2 JP2012114635A JP2012114635A JP6014366B2 JP 6014366 B2 JP6014366 B2 JP 6014366B2 JP 2012114635 A JP2012114635 A JP 2012114635A JP 2012114635 A JP2012114635 A JP 2012114635A JP 6014366 B2 JP6014366 B2 JP 6014366B2
- Authority
- JP
- Japan
- Prior art keywords
- shelf
- movable
- motor
- shelves
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Warehouses Or Storage Devices (AREA)
- Vibration Prevention Devices (AREA)
Description
本発明は、複数の棚が集合離散可能に並べられた棚装置に関するもので、特に、少なくとも1台の棚が、通常はあたかも固定棚と実質的に同じ機能を持ち、必要な場合に移動棚として機能させることができるようにして有用性を高めたものである。 The present invention relates to a shelf device in which a plurality of shelves are arranged in a collective manner, and in particular, at least one shelf usually has substantially the same function as a fixed shelf, and if necessary, a movable shelf As a result, it is possible to make it function as an enhanced utility.
従来一般的に知られている移動棚装置は、複数台の移動棚が集合離散可能に並べられていて、物品を出し入れするときは、物品を出し入れしようとする移動棚の前面にのみ必要な幅の作業通路を形成し、他の移動棚は集合させておくため、スペースの利用効率が高くなる。移動棚は、構成を工夫することによって次のような機能を持たせることができる。 A conventionally known mobile shelf device has a plurality of mobile shelves arranged in a discrete manner, and when an article is taken in or out, the width required only on the front surface of the movable shelf to be taken in or out. Thus, the use efficiency of the space is increased. The mobile shelf can be given the following functions by devising the configuration.
(1)セキュリティ機能
複数台の移動棚を収束させ、その状態で移動不能にロックすることによりセキュリティ機能を持たせる。電動式移動棚を構成するすべての移動棚を収束させてロックしてもよいし、移動棚をブロック分けし、特定のブロックに属する移動棚を収束させてロックしてもよい。収束した移動棚のうち最も外側にある移動棚の収納物には触れることができないように、上記最も外側にある移動棚の物品出し入れ口すなわち間口は建物の壁面などに近接し、あるいは覆い板の類で塞がれている。上記ロックは機械的な施錠によって行うことができ、電動式移動棚の場合は、特定のキーにより、あるいは生体認識された特定の使用者のみがロックを解除することができるようになっている。
(1) Security function A security function is provided by converging a plurality of moving shelves and locking them in an unmovable state in that state. All the movable shelves constituting the electric movable shelf may be converged and locked, or the movable shelf may be divided into blocks, and the movable shelves belonging to a specific block may be converged and locked. In order to avoid touching the contents of the outermost moving shelves among the converged moving shelves, the entrance / exit of the outermost moving shelves, that is, the frontage, is close to the wall of the building, etc. It is blocked by a kind. The lock can be performed by mechanical locking, and in the case of an electric movable shelf, the lock can be released only by a specific key or by a specific user who is recognized by a living body.
(2)多通路機能
電動式移動棚を構成する複数の移動棚を複数のブロックに区分し、各ブロック内で少なくとも1か所に作業通路を形成することができるようにし、少なくともブロック数に相当する複数の作業通路を形成することができる多通路機能を持たせる。例えば、モータを駆動源とする20台の移動棚で電動式移動棚装置が構成されている場合、5台の移動棚ごとに4ブロックに分け、ブロックごとに、他のブロックの移動棚の移動とは無関係にそのブロック内の移動棚を移動させ、各ブロックに少なくとも1つの作業通路を形成することができるようにする。
(2) Multi-passage function A plurality of moving shelves constituting an electric moving shelf are divided into a plurality of blocks so that a work passage can be formed in at least one place in each block, corresponding to at least the number of blocks. A multi-passage function capable of forming a plurality of working passages is provided. For example, when an electric moving shelf device is configured with 20 moving shelves that use a motor as a drive source, each moving block is divided into 4 blocks for every 5 moving shelves, and the moving shelf for other blocks is moved for each block. Regardless of the movement, the moving shelf in the block is moved so that at least one working path can be formed in each block.
移動棚装置に上述のセキュリティ機能を持たせる場合も、多通路機能を持たせる場合も、移動棚装置を構成する移動棚の少なくとも1台を移動不能にロックする必要がある。移動棚のロック装置には、機構的にロックするものと、電動式移動棚の場合は回路的にモータの駆動を不能にするものがある。また、電動式移動棚の場合、ブレーキ装置付きのモータ(ブレーキモータ)を使用し、ブレーキ装置をロック装置として使用することが考えられる。 Whether the mobile shelf device has the above-described security function or the multi-passage function, it is necessary to lock at least one of the mobile shelves constituting the mobile shelf device so that the mobile shelf device cannot move. There are two types of locking devices for moving shelves, one that locks mechanically, and one that makes motors impossible to drive in the case of an electric moving shelf. In the case of an electric moving shelf, it is conceivable to use a motor with a brake device (brake motor) and use the brake device as a lock device.
機構的なロック装置としては、回転操作されるハンドルから駆動車輪に至る動力伝達機構を作動不能にロックするもの、移動棚が備える閂状のロック部材を移動棚の設置床などに形成した穴に突き刺して移動棚を移動不能にロックするものなどがあり、具体的な構成にも各種のもがある。 Mechanical locking devices include those that lock the power transmission mechanism from the rotating handle to the drive wheels inoperably, and the hook-shaped locking members provided on the moving shelf in holes formed on the installation floor of the moving shelf. There are things that pierce and lock the movable shelf so that it cannot move, and there are various kinds of specific configurations.
移動棚は、移動方向前後に走行車輪を有し、通常、前後の車輪の片方が上記駆動輪になっている。上記機構的なロック装置が動力伝達機構をロックするものである場合、上記駆動輪が回転不能にロックされることになり、他方の車輪(これを上記駆動輪に対して「従動輪」という)は回転することができる。したがって、セキュリティ機能を持たせるために複数台の移動棚を収束させ、最も外側の移動棚の動力伝達機構をロックする構成にする場合、駆動輪が従動輪よりも外側に位置するように配慮する必要がある。その理由は、収束している移動棚のうち最も外側の移動棚に、他の移動棚から引き離す方向に引っ張り力または押圧力を加えると、駆動輪はロックされて回転することができないから、駆動輪とこの駆動輪が載っているレールとの接点に荷重がかかり、大きな制動力となるからである。仮に、上記最も外側の移動棚の従動輪が駆動輪よりも外側に位置しているものとすると、上記最も外側の移動棚に、他の移動棚から引き離す方向に力が加わると、従動輪がレール上で転動し制動力がかからない。 The moving shelf has traveling wheels before and after the moving direction, and usually one of the front and rear wheels is the drive wheel. When the mechanical locking device locks the power transmission mechanism, the drive wheel is locked so as not to rotate, and the other wheel (this is referred to as a “driven wheel” with respect to the drive wheel). Can rotate. Therefore, when converging multiple moving shelves to provide a security function and locking the power transmission mechanism of the outermost moving shelf, consider that the driving wheels are positioned outside the driven wheels. There is a need. The reason is that if the pulling force or pressing force is applied to the outermost moving shelf among the moving moving shelves that are converged, the driving wheel is locked and cannot rotate. This is because a load is applied to the contact point between the wheel and the rail on which the driving wheel is mounted, resulting in a large braking force. Assuming that the driven wheel of the outermost moving shelf is located outside the driving wheel, when a force is applied to the outermost moving shelf in a direction away from the other moving shelf, the driven wheel is Rolls on the rail and does not apply braking force.
移動棚が備える閂状のロック部材を移動棚の設置床などに形成した穴に突き刺すロック装置の場合、ロックすることができる移動棚の位置があらかじめ定まる。そのため、セキュリティ機能を持たせるための複数の移動棚からなるブロック構成もあらかじめ定まり、ブロック構成を変更することができないという不自由さがある。 In the case of a lock device that pierces a bowl-shaped lock member provided in the moving shelf into a hole formed in the installation floor of the moving shelf, the position of the moving shelf that can be locked is determined in advance. Therefore, a block configuration including a plurality of moving shelves for providing a security function is also determined in advance, and there is a problem that the block configuration cannot be changed.
多通路機能を持った電動式移動棚も各種提案されている。特許文献1記載の発明はその一つで、隣り合う移動棚のいずれか一方の間口面に他方の棚との近接を検知する前後一対の近接センサを有し、少なくとも一方の近接センサの信号検出を条件として移動棚の移動を停止する多通路モードと、一対の近接センサの両方からの検出信号を条件として移動棚の移動を停止する1通路モードとの切り替えを行うモード切り替え手段を有することを特徴とするものである。
Various electric movable shelves with multi-passage functions have also been proposed. The invention described in
特許文献2には、隣接移動棚が一定の距離まで接近してきたことをセンサが検出したときその移動棚を隣接移動棚の移動の向きと同じ向きに移動させるとともに隣接移動棚との距離を一定に保つように制御し、相隣接する移動棚間の通路への進入を検出手段が検出したときその移動棚の駆動を拒否することによって多通路を実現する電動式移動棚が記載されている。駆動が拒否された移動棚で区分されている他の移動棚は、区分された移動棚群単位で任意に移動させることができるため、多通路方式の移動棚装置が実現する。
In
特許文献3には、隣接する移動棚の少なくとも一方において他方の移動棚との間に形成される通路幅を測定する通路幅測定手段を具備し、予め設定された隣接棚間の最大通路幅の範囲内で任意の幅の通路を任意数、任意の位置に形成することを許容し、上記通路幅測定手段の測定値が最大値に達するとその棚のモータの駆動を停止させるように構成した電動式移動棚が記載されている。
本発明は、前記セキュリティ機能と多通路機能の両者を実現することができる棚装置を提供しようとするものであるが、以下の理由によって、セキュリティ機能と多通路機能の両者を備えた棚装置はこれまで実現していない。すなわち、電動式移動棚においては、移動方向前後の走行車輪の片方がモータで回転駆動される駆動輪になっていて、モータから駆動輪に至る動力伝達機構は減速機構になっている。したがって、移動棚を押しまたは引くことによって駆動輪側からモータに伝達される回転力に対しては、上記動力伝達機構が増速機構になり、抵抗力は大きくなる。とは言え、移動棚を人力で押しまたは引いた場合に移動させることができないほどの大きな抵抗力とはならないため、セキュリティ効果は期待できない。セキュリティ効果をもたせるためには、一群の移動棚のうち少なくとも最も外側に位置する移動棚は、駆動輪側から動力伝達機構を経てモータに至るまでの動力伝達系の抵抗力が、人力では移動棚を移動させることができないほど大きいものでなければならない。 The present invention is intended to provide a shelf device that can realize both the security function and the multi-passage function. However, for the following reason, the shelf device having both the security function and the multi-passage function is provided. It has not been realized so far. That is, in the electric moving shelf, one of the traveling wheels before and after the moving direction is a driving wheel that is rotationally driven by a motor, and the power transmission mechanism from the motor to the driving wheel is a reduction mechanism. Therefore, with respect to the rotational force transmitted from the drive wheel side to the motor by pushing or pulling the movable shelf, the power transmission mechanism becomes a speed increasing mechanism, and the resistance force increases. However, since the resistance is not so great that it cannot be moved when the moving shelf is pushed or pulled manually, a security effect cannot be expected. In order to provide a security effect, at least the outermost movable shelf of the group of movable shelves has the resistance of the power transmission system from the drive wheel side through the power transmission mechanism to the motor, and the manual movement is a movable shelf. It must be so large that it cannot be moved.
上記セキュリティ機能を備えるために、駆動輪側からモータに至るまでの動力伝達系の抵抗力を、人力では移動させることができないほど大きくした移動棚も、移動棚装置を構成する複数の移動棚のうちの一つとして、必要に応じて移動させることができるものでなければならない。上記移動棚は、モータで駆動する場合の抵抗力も大きくなるため、動力伝達系の抵抗力が小さい移動棚に比べて動きが遅く、消費電力が大きい。したがって、上記のように構成されている移動棚は、多通路機能を持った電動式移動棚装置において、複数の移動棚群に区分する移動棚として、すなわち暫定的に固定棚として機能する移動棚として適している。 In order to provide the security function described above, a moving shelf in which the resistance of the power transmission system from the drive wheel side to the motor is so large that it cannot be moved by human power is also included in the plurality of moving shelves constituting the moving shelf device. One of them must be able to be moved as needed. Since the moving shelf has a large resistance when driven by a motor, the moving shelf is slower in movement and consumes more power than a moving shelf having a small resistance in the power transmission system. Accordingly, the movable shelf configured as described above is a movable shelf that functions as a movable shelf that is divided into a plurality of movable shelf groups, that is, temporarily functions as a fixed shelf in an electric movable shelf apparatus having a multi-passage function. Suitable as
本発明は、以上述べたような従来の棚装置の技術をさらに発展させ、セキュリティ機能を持たせることができ、あるいは多通路機能を持たせるのに適した棚装置を提供することを目的とする。 It is an object of the present invention to provide a shelf apparatus that can further develop the technology of the conventional shelf apparatus as described above and have a security function or a multi-passage function. .
本発明に係る棚装置は、
走行車輪を回転駆動することにより棚を移動させるモータ、指令信号に応じて前記モータの回転を制御するモータ制御部、前記モータ制御部を含む制御部を備えた複数の棚が収束離散可能に配置されてなる棚装置であって、
前記複数の棚の少なくとも一つは、前記モータにブレーキ力を付加することができるブレーキ装置と、前記少なくとも一つの棚を可動または固定に切り替える切り替えスイッチと、を有するとともに、前記少なくとも一つの棚の移動方向前後の前記走行車輪の車輪軸が同期して回転可能に連結部材で連結されており、
前記複数の棚の少なくとも一つの前記制御部は、前記切り替えスイッチが固定側に切り替えられると前記ブレーキ装置のブレーキ力を前記モータに加え、前記切り替えスイッチが可動側に切り替えられると前記ブレーキ装置のブレーキ力を前記モータから解放するブレーキ制御部と、を備えていることを最も主要な特徴とする。
The shelf apparatus according to the present invention is
A plurality of shelves provided with a motor that moves the shelf by rotationally driving the traveling wheel, a motor control unit that controls the rotation of the motor according to a command signal, and a control unit that includes the motor control unit are arranged in a convergent and discrete manner A shelf device,
At least one of the plurality of shelves includes a brake device that can apply a braking force to the motor, and a changeover switch that switches the at least one shelf to be movable or fixed. The wheel shafts of the traveling wheels before and after the moving direction are connected by a connecting member so as to be rotatable synchronously,
At least one of the control unit of the plurality of shelves, the changeover switch is added the braking force of the brake device and Ru is switched to the fixed side to the motor, and the changeover switch is switched to the movable side of the brake device And a brake control unit for releasing the braking force from the motor .
切り替えスイッチが固定側に切り替えられているときは棚が固定棚と実質同一になり、上記棚を手動で移動させることは不可能である。したがって、収束させた一群の棚の最も外側の棚として上記構成の棚を用いることにより、セキュリティ性能の優れた棚装置を得ることができる。加えて、移動方向前後の走行車輪が連結部材で連結されているため、手動による押圧力または引っ張り力によって棚をどの向きに移動させようとしても移動させることは困難である。
Shelf becomes solid Teitana virtually identical when the changeover switch is switched to the fixed side, it is impossible to move the rack manually. Therefore, by using the shelf having the above-described configuration as the outermost shelf of the group of converged shelves, a shelf device with excellent security performance can be obtained. In addition, since the driving wheels of the moving direction back and forth is connected by a connecting member, it is difficult even to move an attempt is made to move in any direction the shelf by the pressing force or tensile force by hand.
上記構成の棚を、多通路方式の電動式移動棚装置における一つの移動棚群と別の移動棚群とを区分する棚として用いることもできる。電動式移動棚装置を多通路方式で運用する場合、一つの移動棚群と別の移動棚群とを区分する移動棚を本発明に係る棚装置における少なくとも一つの棚の構成とし、この棚を移動不可能にロックして固定棚として機能させる。 The shelf having the above-described configuration can also be used as a shelf that separates one moving shelf group and another moving shelf group in the multi-path type electric moving shelf apparatus. When an electric mobile shelf device is operated in a multi-passage system, a mobile shelf that separates one mobile shelf group from another mobile shelf group is configured as at least one shelf in the shelf device according to the present invention, and this shelf is Locks immovable and functions as a fixed shelf.
以下、本発明に係る棚装置の実施例について図面を参照しながら説明する。 Hereinafter, embodiments of a shelf device according to the present invention will be described with reference to the drawings.
本発明に係る棚装置の実施例の概要を図1に示す。図1に示す例では、A,B,C,D,Eで表す5台の移動棚10が、床に敷設されているガイドレールに沿って移動可能に並べられている。上記5台の移動棚10を挟んで移動方向前後に固定棚が設置され、これら固定棚間において上記5台の移動棚10が移動できるようになっている。各移動棚10は底部に適宜数の走行車輪を有していて、走行車輪はガイドレールの上に乗せられている。各移動棚10の走行車輪が駆動モータによって回転駆動されることにより、全走行車輪がガイドレール上で転動しながら各移動棚10が移動するように構成されている。駆動モータは各移動棚に設けられている。A,B,C,D,Eで表す5台の電動式移動棚のうちCで示す電動式移動棚100は、あたかも固定棚であるかのように扱うことができ、本発明に係る棚装置を構成する移動棚の中で特徴ある構成を備えている。
An outline of an embodiment of a shelf device according to the present invention is shown in FIG. In the example shown in FIG. 1, five
各移動棚10、100は、収納物品を出し入れする面を有していて、この面を間口面という。上記間口面を移動棚の正面とすると、図1は上記間口面に直交する方向から見た側面図であって、各移動棚10、100の側面には側パネルが取り付けられている。各移動棚10,100の側パネルには、ユーザーが起立した姿勢で操作しやすい高さ位置に、側パネルに向かって右側と左側にそれぞれ操作スイッチ41,42が取り付けられている。操作スイッチ41は、この操作スイッチを備えている移動棚を図1に示す側面から見て左向きに移動させ、その移動棚の右側に通路を形成するためのスイッチである。操作スイッチ42は、その移動棚を図1に示す側面から見て右向きに移動させ、その移動棚の左側に通路を形成するためのスイッチである。
Each of the
操作スイッチ41,42を操作することにより移動棚を移動させ、所望の移動棚相互間に作業用の通路を形成することができる。操作スイッチの操作による作業通路形成制御方式には各種あるが、大きく分けると、次の二つである。一つは、操作スイッチ41を左に向かって押圧操作している間移動棚が左に移動し、他方の操作スイッチ42を右に向かって押圧操作している間移動棚が右に移動し、操作スイッチ41,42の操作を止めると移動棚が停止する方式である。他の一つは、一つの移動棚1の操作スイッチ41を押すと、その移動棚の右側に作業通路を形成するには、どの移動棚をどの向きに移動させればよいか、また、操作スイッチ42を押すと、その移動棚の左側に作業通路を形成するには、どの移動棚をどの向きに移動させればよいかを自動的に判断し、判断にしたがって各移動棚の移動を制御するものである。本発明で用いる電動式移動棚の駆動方式は任意で、どのような駆動方式であってもよい。
By operating the operation switches 41 and 42, the moving shelf can be moved, and a working path can be formed between desired moving shelves. There are various types of work path formation control methods by operating the operation switch. One is that the moving shelf moves to the left while the
図1(a)に示す動作態様では、左側の固定棚12とAで示す移動棚10との間に作業通路1が、右側の固定棚12とEで示す移動棚10との間に作業通路2が形成されている。通常の電動式移動棚装置としての使用態様では、Cで示す移動棚100は、後で詳細に説明するように固定棚と実質的に同じであって、特別な切り替え操作を行って移動棚として動作可能なモードに切り替えない限り移動しない。したがって、図1(a)に示す動作態様では、移動棚100で区分された左側のブロック1と右側のブロック2でそれぞれ任意の移動棚の右側または左側に作業通路を形成することができる多通路方式の電動式移動棚装置を構成している。以下、上記電動式移動棚100を「可動固定棚」という。
In the operation mode shown in FIG. 1A, the
図1(a)に示す動作態様において、セキュリティ機能を持たせるための操作、例えば収束操作部材が操作されたとする。この操作により、Cで示す可動固定棚100が図1(b)に矢印で示す左の向きに移動し始め、これに伴いA,Bで示す移動棚10も左の向きに移動する。この動作で図1(c)に示すようにブロック1を構成する各移動棚が固定棚に近接し、ブロック2では、2つの作業通路を、CとDで示す移動棚間と、Eで示す移動棚10と固定棚12との間に形成する。
In the operation mode shown in FIG. 1A, it is assumed that an operation for providing a security function, for example, a convergence operation member is operated. By this operation, the movable fixed
上記収束動作が終了すると、Cで示す可動固定棚100への電源供給を停止するあるいは可動固定棚100のモータへの電源供給を停止するなどの動作により、可動固定棚100を移動不可能な状態にする。図1(d)は可動固定棚100が移動不可能な状態になっていることを示していて、上記可動固定棚100は、特定の使用者が所持しているキーなどの操作、あるいは生体認識による特定の者による操作でない限り、移動させることができない。こうして左側の固定棚12と、A,B,Cで示す移動棚が収束し、これらの棚に対する物品の出し入れが制限される。また、この動作態様において可動固定棚100の右側の間口面にパネルを嵌め、上記特定の者しか上記パネルを取り外すことができないように施錠することにより、セキュリティ効果を高めることができる。あるいは、特別なキーを使用するか、生体認識による特定の人でなければ可動固定棚100を移動させることができないようにすることによってセキュリティ効果を高めることもできる。
When the convergence operation is finished, the movable fixed
上記電動式移動棚装置の例における移動棚10は、従来知られている電動式移動棚の構成と同じものを適用可能であるが、Cで示す可動固定棚100の構成は本発明特有の特徴ある構成になっている。以下、上記可動固定棚100の駆動系および制御系について説明する。
The
図2は上記駆動系の例を示す。可動固定棚100は平面形状が長方形の台枠14をベースとして有していて、台枠14と、台枠14に立てられた適宜数の支柱16と、各支柱16の上端部を連結する天板によって可動固定棚100の骨組みが構成されている。間口方向に所定の間隔で並んでいる支柱16によって適宜段数の棚板(図示されず)が支持されている。可動固定棚100の一側面には側板15が被せられ、側板15の左右両側には適宜の高さ位置に前記操作スイッチ41,42が取り付けられている。側板15の内面側には制御部20が回路基板に組み込まれて配置されている。側板15にはまた、可動固定棚100を可動側と固定側に切り替える切り替えスイッチ38が取り付けられている。
FIG. 2 shows an example of the drive system. The movable fixed
台枠14には、台枠14の長手方向に2本の回転軸が支持されていて、各回転軸には一定間隔で走行車輪が固着されている。走行車輪はガイドレールに載せられ、ガイドレール上で走行車輪が回転することにより可動固定棚100は台枠14の幅方向すなわち間口面に直交する方向に移動することができる。上記2本の回転軸は可動固定棚100の移動方向前側と後ろ側に互いに平行に支持されている。2本の回転軸の一方には、モータ30の回転力が、ギヤあるいはスプロケットとチェーンなどからなる動力伝達機構を介して伝達される。2本の回転軸には長さ方向の同じ位置に同じ径のスプロケットが固着されていて、これらのスプロケットに無端のチェーン18がかけられている。したがって、モータ30の回転力は、一方の回転軸に伝達されるとともに、上記スプロケットとチェーン18を介して他方の回転軸にも伝達され、可動固定棚100の移動方向前後の前記走行車輪が共にモータ30によって回転駆動される駆動輪となっている。
Two rotation shafts are supported on the
可動固定棚100が備えている移動方向前側および後ろ側の走行車輪をそれぞれ一体回転可能に連結する車輪軸に一体に設けられたスプロケットと、各車輪軸のスプロケットを連結するチェーン19とで、可動固定棚100の移動方向前後の走行車輪軸を同期させて回転させる連結部材を構成している。
The movable fixed
モータ30はブレーキ装置31を備えている。ブレーキ装置31はブレーキ制御部からの制御信号によってモータ30にブレーキ力を加える態様とブレーキ力をモータ30から解放する態様に切り替えられるように構成されている。モータ30は、出力軸とモータの回転子とを結合しまた切り離すことができるモータクラッチを内蔵している。
The
上記モータクラッチは例えば電磁クラッチであって、クラッチ制御部からの制御信号によってモータ30とその出力軸を結合する態様とモータ30とその出力軸を切り離す態様をとることができる。上記モータクラッチが存在する場合、ブレーキ装置31は常時ブレーキ力を付与する態様をとっていて、このブレーキ力を上記クラッチの動作によってモータ30の回転力を出力軸に伝達する態様と、モータ30から出力軸への回転力を遮断する態様に切り替えるようにする。あるいは、クラッチ制御部とブレーキ制御部による上記クラッチおよびブレーキ装置31の制御を同期させ、ブレーキ装置31がブレーキ力を解放すると同時にクラッチがモータ30とその出力軸を切り離すようにしてもよい。
The motor clutch is, for example, an electromagnetic clutch, and can take a mode in which the
ブレーキ装置31とモータクラッチの動作態様は、切り替えスイッチ38の切り替え態様に応じて切り替えられる。切り替えスイッチ38が可動固定棚100を可動側に切り替えている態様にあるときは、モータ30にブレーキ力が付加されるように上記ブレーキ制御部がブレーキ装置31の動作を制御し、また、モータ30とその出力軸を結合するようにクラッチ制御部がモータクラッチの動作を制御する。
The operation modes of the
次に、可動固定棚100に用いられている制御系の例について説明する。制御系の構成は、駆動系の構成とともにいくつかの例があるので、それぞれ異なる実施例として説明する。
Next, an example of a control system used for the movable fixed
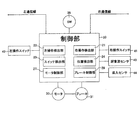
図3、図4は第1の実施例を示す。図3において、符号20は可動固定棚100が備えている制御部を示している。制御部20はマイクロコンピュータあるいは中央処理ユニット(CPU)などからなり、回路基板に実装されている。制御部20は、図3において各ブロックで示す以下のような機能部を備えている。
右操作スイッチ41の操作を検出する右操作検出部21。
左操作スイッチ42の操作を検出する左操作検出部22。
切り替えスイッチ38の切り替え態様を検出するスイッチ検出部23。
通路幅を検出する超音波センサ43からの検出信号に基づいて可動固定棚100の位置を検出する位置検出部24。
右操作検出部21、左操作検出部22、位置検出部24からの信号に基づきモータ30の正転、逆転および停止を制御するモータ制御部27。
スイッチ検出部23からの信号に基づきブレーキ装置31の動作を制御するブレーキ制御部28。
3 and 4 show a first embodiment. In FIG. 3,
A right
A left
A
A
A
A
上記右操作スイッチ41、左操作スイッチ42、超音波センサ43、進入センサ44、切り替えスイッチ38、モータ30、ブレーキ装置31は、制御部20の外部に配置され、制御部20に上記のように接続されている。モータ30は可動固定棚100の駆動用モータであって、前述のようにブレーキ装置31を備えている。モータ30は、モータ制御部27からの制御信号によって正転、逆転および停止が制御される。ブレーキ装置31は、ブレーキ制御部28からの制御信号によってオンオフすなわちモータ30に対するブレーキ力の付与とブレーキ力の解放が制御される。
The
モータ制御部27、ブレーキ制御部28は、適宜の駆動回路あるいはスイッチなどの動作を制御してモータ30、ブレーキ装置31の動作を制御するものであるが、上記駆動回路あるいはスイッチは、モータ制御部27、ブレーキ制御部28に含まれるものとして説明する。口述の他の実施例においても同様である。
The
切り替えスイッチ38は、可動固定棚100を可動棚として機能させるモードまたは固定棚として機能させるモードに切り替えるスイッチである。切り替えスイッチ38が固定側に切り替えられているときは、ブレーキ制御部28がブレーキ装置31をオンにし、モータ30にブレーキをかける。図2に示す駆動系の構成からわかるように、可動固定棚100の移動方向前後の回転軸がチェーン18とスプロケットを介して連結されることにより前後輪駆動方式になっているため、モータ30にブレーキ力がかかると前後輪にブレーキ力がかかり、可動固定棚100は実質的に固定棚とみなすことができる。
The
右操作スイッチ41、左操作スイッチ42については図1において説明した。超音波センサ43は、隣の移動棚に向かって超音波を出射し、出射時と隣の移動棚から反射されて戻ってきた時間の差によって距離を計測するためのセンサで、通路幅計測装置を構成している。通路幅計測装置として、超音波センサ43に代わり、隣り合う移動棚に設けられたスイングアームの先端同士を相対回転可能に連結し、隣り合う移動棚相互の距離に応じてスイングアームの回転角度が異なることを利用して隣り合う移動棚相互の距離を計測するようにした機構的な計測方式を採用してもよい。その他適宜の方式の通路幅計測装置を選択して採用することができる。
The
制御部20の位置検出部24は、超音波センサ43の検出信号に基づいて、可動固定棚100とこれに隣接する移動棚との間に形成される通路幅、停止位置などの位置関係を検出する。位置検出部24によって隣接する移動棚に所定の距離まで接近し、通路幅が狭くなって停止位置に達すると、モータ制御部がモータ30の駆動を停止し、移動棚の移動を停止させる。
The
制御部20は、隣り合う移動棚の制御部と信号をやり取りするための連絡路で接続してもよい。例えば、図3に示す例において、右通信線は、右操作検出部21で生成される右行き信号を右隣の棚に転送し、右隣の棚から転送される左行き信号を入力し、超音波センサ43の検出信号によって位置検出部24で生成した通路幅信号を右隣の棚に転送する。左通信線は、左操作検出部22で生成される左行き信号を左隣の棚に転送し、左隣の棚から転送される右行き信号を入力し、左隣の棚で生成される通路幅信号を入力する。また、左通信線は、Cで示す可動固定棚100の収束操作部材を操作したとき、左側に隣接するBで示す移動棚10に、左側に移動すべき旨の信号を伝達する連絡路として利用することができる。
The
図3に示す制御系の動作例を図4に示す。各ステップをS1,S2,S3,・・・のように表す。まず、前記切り替えスイッチ38がONかどうかを判断する(S1)。切り替えスイッチ38がONとは、移動棚100を可動側に切り替えることである。切り替えスイッチ38がONに切り替えられなければ、前記ブレーキ制御部28がブレーキ装置31によるブレーキ力を維持するようにブレーキ装置31の動作を制御し(S8)、移動棚100に実質的な固定棚としての機能を持たせる。
An example of the operation of the control system shown in FIG. 3 is shown in FIG. Each step is represented as S1, S2, S3,. First, it is determined whether the
切り替えスイッチ38がONに切り替えられると、ブレーキ装置31によるブレーキ力を解放するようにブレーキ制御部28がブレーキ装置31を制御する(S2)。切り替えスイッチ38がONに切り替えられると、次に前記操作スイッチ41,42の何れかが操作されたか否かの判断ステップ(S3)に進む。このステップ(S3)で何れの操作スイッチ41,42も操作されないとステップS1に戻る。したがって、一旦切り替えスイッチ38がONに切り替えられた後、何れの操作スイッチ41,42も操作されることなく切り替えスイッチ38がOFFに戻されると、ブレーキ装置31がモータ30にブレーキ力を付加する(S8)。ステップ(S3)で操作スイッチ41,42の何れかが操作されると、操作スイッチ41または操作スイッチ42で指示される方向に可動固定棚100が移動するように、モータ制御部27がモータ30を駆動する(S4)。
When the
モータ30の駆動によって可動固定棚100が指示された向きに移動する。前記位置検出部24が超音波センサ43からの検出信号に基づいて隣り合う移動棚との間隔を検出し、停止位置に至ったか否かを判断する(S5)。停止位置に至らなければ上記モータ30の駆動ステップ(S4)を継続する。停止位置に至ればモータ制御部27がモータ30の駆動を停止させる(S6)。さらに、切り替えスイッチ38の切り換え態様を確認し(S7)、切り替えスイッチ38がオンになっていなければ、すなわち固定側に切り替わっていなければ、前記ブレーキ制御部28がブレーキ装置31をオンにし(S8)、ブレーキ力をモータ30に付加する。さらに、隣接する棚との通信を遮断し(S9)、可動固定棚100を実質的に固定棚とする。
As the
以上説明した第1の実施例によれば、切り替えスイッチ38の切り替えによって、可動固定棚100を実質的に固定棚として機能する態様と、移動棚として機能する態様に切り替えることができる。可動固定棚100の駆動系は、前述のように前後輪が共に駆動される形式になっていて、モータ30に加わるブレーキ力は前後輪にも加わるため、固定棚として機能する態様では、可動固定棚100を前後方向に押したり引いたりしても移動させることは困難である。そこで、可動固定棚100と従来の電動式移動棚の構造と同じ構造の他の移動棚とを収束させ、収束している一群の移動棚の外側に可動固定棚100を位置させてこれを特定のキーや生体認証などを使用しなければ移動棚として機能させることができないようにする。こうすることにより、一群の移動棚のセキュリティ効果を高めることができる。
According to the first embodiment described above, by switching the
また、可動固定棚100を境にしてその両側に複数の移動棚を配置し、可動固定棚100が固定棚として機能するように切り替えスイッチ38を切り換えておけば、可動固定棚100の両側にそれぞれ少なくとも一つの作業通路を形成することができる多通路方式の移動棚装置を構成することができる。可動固定棚100は、必要に応じて一時的に移動棚として機能させることもできるため、多通路方式移動棚装置のレイアウトを変更することも容易である。
Further, if a plurality of movable shelves are arranged on both sides of the movable fixed
図3に示す第1の実施例において、進入センサ44は、形成されている作業通路に人間その他の物体が進入したことを検出するものである。この検出信号によって、移動中の移動棚を緊急停止させ、あるいは上記検出信号によってインターロックをかけ、別の位置に作業通路を形成することができないようにするなどの機能を持たせることができるが、本発明とは関係がないので詳細な説明は省略する。
In the first embodiment shown in FIG. 3, the
上記実施例において、ブレーキ装置31は、移動可能な棚を移動不可能にロックすることができるロック装置と実質的に変わりのないものとみてよい。次に説明する第2の実施例におけるブレーキ装置31についても同様である。
In the above embodiment, the
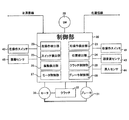
次に、図5に示す第2の実施例について説明する。この実施例が図3に示す第1の実施例と異なる点は、モータ30が出力軸との間にクラッチ32を備えていることと、振動センサ45を備えていることであり、また、制御部20が、振動検出部25、クラッチ制御部29を備えていることである。振動検出部25は、振動センサ45の検出信号から一定以上の振動を検出したとき信号を出力する。クラッチ制御部29は、電源検出部23、振動検出部25からの信号に基づきクラッチ32の動作を制御する。
Next, a second embodiment shown in FIG. 5 will be described. This embodiment is different from the first embodiment shown in FIG. 3 in that the
クラッチ32はモータ30とその出力軸を結合しまたこの結合を解除するもので、クラッチ制御部29からの制御信号によってオンオフが制御される。振動センサ45は主として地震を検出するもので、振動センサ45の出力信号は振動検出部25に入力される。振動検出部25は一定の震度に達すると信号を出力し、この出力信号を受けたクラッチ制御部29がクラッチ32を作動させ、仮にモータ30とその出力軸をクラッチ32が結合していたとしても、モータ30とその出力軸を切り離すようになっている。
The clutch 32 couples the
上記第2の実施例の動作を、図6を参照しながら説明する。まず、前記切り替えスイッチ38がONかどうかを判断する(S11)。切り替えスイッチ38がONに切り替えられると、ブレーキ装置31によるブレーキ力を解放するようにブレーキ制御部28がブレーキ装置31を制御する(S12)。次に前記操作スイッチ41,42の何れかが操作されたか否かの判断ステップ(S13)に進む。このステップ(S13)で何れの操作スイッチ41,42も操作されないとステップS11に戻る。
The operation of the second embodiment will be described with reference to FIG. First, it is determined whether the
ステップ(S13)で操作スイッチ41,42の何れかが操作されると、クラッチON(S14)になる。すなわちクラッチ制御部29がクラッチ32を制御してモータ30とその出力軸を結合する。また、操作スイッチ41または操作スイッチ42で指示される方向に移動棚100が移動するように、モータ制御部27がモータ30を駆動する(S15)。
When any of the operation switches 41 and 42 is operated in step (S13), the clutch is turned on (S14). That is, the
次に、振動検出ステップ(S16)に進む。このステップ(S16)では、振動検出部25が振動センサ45の検出信号を演算し、一定の震度以上の振動が発生したか否かを判断する。一定の震度以上の振動が発生した場合は、クラッチ32をオフすなわちクラッチ32によるモータ30とその出力軸の結合を解除する(S17)。これによってモータ30が走行車輪の駆動機構から解放されるため、可動固定棚100の走行車輪の回転抵抗が軽減され、地震によって床面とともにガイドレールが移動すると、走行車輪はガイドレール上を転動し、可動固定棚100は免震効果を得ることができる。
Next, the process proceeds to the vibration detection step (S16). In this step (S16), the
上記ステップS17の次に振動検出ステップ(S16)に戻り、検出される震度が一定以下に低下していれば上記免震のための動作ループを抜け、クラッチがオンか否かの判断ステップ(S29)に進む。地震によって上記免震動作が行われた場合はクラッチ32がオフになっているので、クラッチ32をオンにして(S31)、次の停止位置かどうかの判断ステップ(S19)に進む。免震動作が行われなかった場合、クラッチ32はオンになっているので、そのままステップS19に進む。 After step S17, the process returns to the vibration detection step (S16), and if the detected seismic intensity has fallen below a certain level, the operation loop for the seismic isolation is exited, and the step of determining whether the clutch is on (S29). ) When the seismic isolation operation is performed due to an earthquake, the clutch 32 is turned off. Therefore, the clutch 32 is turned on (S31), and the process proceeds to a determination step (S19) as to whether or not it is the next stop position. If the seismic isolation operation has not been performed, the clutch 32 is on, and the process directly proceeds to step S19.
停止位置かどうかの判断ステップ(S19)において、可動固定棚100が停止位置に至っていなければステップ(S16)に戻る。停止位置に至ればモータ制御部27がモータ30の駆動を停止させ(S20)、次の切り替えスイッチ38がオンか否かの判断ステップ(S21)に進む。この判断ステップ(S21)では、切り替えスイッチ38がオフすなわち可動固定棚100が固定棚として機能するモードに切り替えられるのを待ち、切り替えスイッチ38がオフになると、ブレーキ装置31をオン(S22)にし、さらに隣接棚との通信を遮断して(S24)動作を終了する。ブレーキ装置31がオン、クラッチ32がオンになることにより、ブレーキ装置31のブレーキ力がモータ30、クラッチ32、モータ30の出力軸を介して走行車輪の駆動機構に付加され、さらに隣接棚との通信が遮断されることによって可動固定棚100が固定棚と実質同一になる。
If the movable fixed
ステップS11で切り替えスイッチ38がオンにならない、すなわち可動固定棚100が移動モードに切り換えられない場合は、ブレーキ装置31はオン(S25)、クラッチ32はオン(S26)になり、隣接棚との通信は遮断状態(S27)に維持される。この状態で振動検出ステップ(S28)に進み、一定の震度以上の振動が検出された場合は、クラッチ32をオフ(S30)にして免震効果を発揮させ、ステップS28に戻る。一定の震度以上の振動が続いている間は上記免震効果を発揮させる動作を続けるが、一定の震度以下になると上記免震のためのループを抜けてステップS11に戻る。
If the
以上説明した第2の実施例によれば、前記第1の実施例にクラッチ32を加えるとともに、振動センサ45の検出信号によってクラッチ32を作動させ、モータ30とその出力軸を切り離すようにしたため、移動棚100に免震機能を持たせることができる。したがって、可動固定棚100が固定棚と実質同一の状態であったとしても、地震の発生によって免震機能を発揮する態様に切り替えられ、可動固定棚100の転倒、あるいは収納物の落下を防止することができる。
According to the second embodiment described above, the clutch 32 is added to the first embodiment, and the clutch 32 is operated by the detection signal of the
次に、図7に示す第3の実施例について説明する。この実施例が図3、図5に示す実施例と異なる点は、可動固定棚100が収束操作部材46を備えていて、この収束操作部材46を操作することにより、可動固定棚100を含む一群の移動棚が収束するように構成した点である。収束操作部材46は、一つのブロックを構成する複数の移動棚を収束させてセキュリティ機能を持たせる場合に操作されるもので、例えば、可動固定棚100の側パネルなどに取り付けられている。図7において、収束操作部材46の操作信号は制御部20に入力され、制御部20が備えている収束制御部26が、上記操作信号に基づいて可動固定棚100を所定の収束位置に向かって移動させるように、モータ30、ブレーキ装置31、クラッチ32を制御する。その他の構成は図5に示す実施例の構成と同じであるから説明を省略する。
Next, a third embodiment shown in FIG. 7 will be described. This embodiment differs from the embodiment shown in FIGS. 3 and 5 in that the movable fixed
上記第3の実施例の動作例について図8を参照しながら説明する。まず、前記切り替えスイッチ38がONかどうかを判断する(S41)。切り替えスイッチ38がONに切り替えられると、ブレーキ装置31によるブレーキ力を解放するようにブレーキ制御部28がブレーキ装置31を制御する(S42)。次に収束操作部材46が操作されたか否かの判断ステップ(S43)に進む。このステップ(S43)で収束操作部材46が操作されないとステップS41に戻る。
An operation example of the third embodiment will be described with reference to FIG. First, it is determined whether or not the
ステップ(S43)で収束操作部材46が操作されると、クラッチON、すなわちクラッチ制御部29がクラッチ32を制御してモータ30とその出力軸を結合する(S44)。また、所定の向きすなわち可動固定棚100を含む一群の移動棚が収束するように、可動固定棚100のモータ制御部27がモータ30を駆動し(S45)、可動固定棚100を指示方向に駆動する。
When the
次に、振動検出ステップ(S46)に進む。以下の動作は前記第2の実施例の動作と同じで、ステップ(S46)で一定の震度以上の振動が発生したか否かを判断し、一定の震度以上の振動が発生した場合は、クラッチ32をオフすなわちクラッチ32によるモータ30とその出力軸の結合を解除する(S47)。こうしてモータ30が走行車輪の駆動機構から切り離されるため、地震によって床面とともにガイドレールが移動すると、走行車輪はガイドレール上を転動し、移動棚100は免震効果を得ることができる。
Next, the process proceeds to the vibration detection step (S46). The following operation is the same as that of the second embodiment. In step (S46), it is determined whether or not a vibration having a certain seismic intensity or more has occurred. 32 is turned off, that is, the coupling between the
上記ステップS47の次に振動検出ステップ(S46)に戻り、検出される震度が一定以下に低下していれば上記免震のための動作ループを抜け、クラッチがオンか否かの判断ステップ(S59)に進む。地震によって上記免震動作が行われた場合はクラッチ32がオフになっているので、クラッチ32をオンにして(S61)次の停止位置かどうかの判断ステップ(S49)に進む。免震動作が行われなかった場合、クラッチ32はオンになっているので、そのままステップS49に進む。 After step S47, the process returns to the vibration detection step (S46), and if the detected seismic intensity is reduced below a certain level, the operation loop for the seismic isolation is exited, and the step of determining whether or not the clutch is on (S59). ) If the seismic isolation operation is performed due to an earthquake, the clutch 32 is turned off. Therefore, the clutch 32 is turned on (S61), and the process proceeds to a determination step (S49) for determining whether or not it is the next stop position. If the seismic isolation operation has not been performed, the clutch 32 is on, and the process directly proceeds to step S49.
停止位置かどうかの判断ステップ(S49)において、可動固定棚100が停止位置に至っていなければステップ(S46)に戻る。停止位置に至ればモータ制御部27がモータ30の駆動を停止させ(S50)、次の、切り替えスイッチ38がオンか否かの判断ステップ(S51)に進む。この判断ステップ(S51)では、切り替えスイッチ38がオフすなわち可動固定棚100が固定棚として機能するモードに切り替えられるのを待ち、切り替えスイッチ38がオフになると、ブレーキ装置31をオン(S52)、クラッチ32をオン(S53)、隣接棚との通信を遮断して(S54)動作を終了する。ブレーキ装置31がオン、クラッチ32がオンすることにより、ブレーキ装置31のブレーキ力がモータ30、クラッチ32、モータ30の出力軸を介して走行車輪の駆動機構に付加され、可動固定棚100が固定棚と実質同一になる。また、隣接棚との通信が遮断されることにより、上記可動固定棚100と、通信が遮断された上記隣接棚は、互いに別のブロックに属する棚となる。
If the movable fixed
ステップS41で切り替えスイッチ38がオンにならず、可動固定棚100が移動モードに切り替えられない場合は、ブレーキ装置31はオン(S55)、クラッチ32はオン(S58)に維持され、隣接棚との通信が遮断される(S57)。この状態で振動検出ステップ(S58)に進み、一定の震度以上の振動が検出された場合は、ブレーキ装置31をオフ(S59)、クラッチ32をオフ(S60)にして免震効果を発揮させ、ステップS56に戻る。一定の震度以上の振動が続いている間は上記免震効果を発揮させる動作を続けるが、上記一定の震度以下になると上記免震のためのループを抜けてステップS41に戻る。
If the
収束操作部材46が操作されることによって可動固定棚100が所定の向きに移動するとき、可動固定棚100とともに一群をなす他の移動棚も可動固定棚100と同じ向きに移動して一群の移動棚が収束する。前に説明した図1(d)は、可動固定棚100を含む3台の移動棚A,B,Cが収束した状態を示しており、これらの移動棚が収束した後は、一群の移動棚A,B,CのうちCで示す外側の可動固定棚100のブレーキ装置31、クラッチ32がともにオンになり、可動固定棚100は固定棚と実質同一になる。したがって、特定のキーによりあるいは生体認識による特定の人間により操作された場合にのみ収束態様を解消することができないようにすれば、上記一群の移動棚に、その収納物を取り出すことができないセキュリティ機能を持たせることができる。この場合、可動固定棚100の間口面に扉やパネルなどを設け、上記キーや生体認識などによってのみ扉やパネルなどを開くことができないようにすれば、セキュリティ機能を一層高めることができる。
When the movable fixed
上記一群の移動棚が可動固定棚100とともに移動するときの可動固定棚100以外の移動棚は、可動固定棚100の押圧力で移動するようにしてもよいし、各移動棚個別の駆動力と制御によって移動するようにしてもよい。
The movable shelves other than the movable fixed
以上説明した棚装置の実施例では、棚装置を構成する棚が電動式移動棚の例であったが、手動式移動棚にも本発明に係る技術思想を適用することができる。手動式移動棚の場合、駆動モータを備えていないので、上記可動固定棚100に相当する少なくとも一つの棚に、この棚を移動不可能にロックすることができるロック装置を設ける。このロック装置は、例えば、回転操作ハンドルの回転力を走行車輪軸に伝達する動力伝達機構の動作を拘束する機構であってもよいし、床などに設けた穴に閂を嵌める機構など、適宜の機構を採用することができる。動力伝達機構の動作を拘束するロック装置でロックした場合、ロックを解除した場合に比べて、約100倍の力量を加えなければ棚を移動させることができず、棚を移動させることは不可能と言ってよい。図9乃至図11は、本発明に係る技術思想を手動式移動棚に適用した例(第4の実施例)であって、前記可動固定棚100に組み込まれた機構の例を示している。
In the embodiment of the shelf device described above, the shelf constituting the shelf device is an example of an electric movable shelf, but the technical idea according to the present invention can also be applied to a manual movable shelf. In the case of a manual moving shelf, since a drive motor is not provided, a lock device that can lock the shelf so as not to move is provided on at least one shelf corresponding to the movable fixed
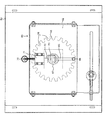
図9、図10において、符号50は棚の側板の一部を構成するハンドル支持パネルを示している。ハンドル支持パネル50の内面側には駆動機構のハウジング60が固定されている。ハウジング60は、前パネル61と、後パネル62と、これら前パネル61と後パネル62を一定の間隔をおいて連結する連結部材63によって、上下が開放した箱形に形成されている。
9 and 10,
前パネル61と、後パネル62には、相対向する面の中心部にそれぞれ軸受53が取り付けられ、この一対の軸受53によって管軸51がその中心軸線の周りに回転可能に支持されている。管軸51の一端部はハンドル支持パネル50から外側に突き出ていて、この管軸51の突出端部には回転操作ハンドル55のハブ54が嵌め込まれている。回転操作ハンドル55とハブ54は複数本のスポーク56によって一体に連結されている。ハブ54と管軸51は一体に結合され、回転操作ハンドル55とともに管軸51が回転することができる。
The
管軸51の外周には、ハウジング60の前パネル61と後パネル62との間においてスプロケット52が固着されるとともにスプロケット52の後にスプロケット状のロック輪58が固着されている。したがって、回転操作ハンドル55とともにスプロケット52とロック輪58が一体に回転する。スプロケット52と、このスプロケット52の下方において図示されない走行車輪軸に固着されたスプロケットとの間にはチェーンが掛け渡されている。スプロケット52の径よりも走行車輪軸のスプロケットの径が大きく、また、スプロケット52の径よりも回転操作ハンドル55の径が大きく、回転操作ハンドル55から走行車輪軸のスプロケットに至る動力伝達機構は減速機構を構成している。上記走行車輪軸は上記棚の移動方向前後に配置され、前後の走行車輪軸は、図2について説明したように、同径のスプロケットとチェーンなどからなる連結部材によって、同期して回転可能に連結されている。
On the outer periphery of the
管軸51内にはロック装置を構成するロック軸65が管軸51に沿ってスライド可能に嵌められている。ロック軸65の前端部は管軸51の前端から突出していて、このロック軸65の突出端部にはロック操作つまみ67が固着されている。ロック軸65の後端部は前記後パネル62の背面側に突出するとともに、後パネル62の背面に沿って下方に直角に折り曲げられ、さらに直角に折り返されている。このロック軸65の折り返し部はロック端部66となっていて、後パネル62に形成されている孔を前記ハウジング60の内方に向かって貫通するとともに、ロック輪58の外周縁部に対向している。ロック輪58の外周縁部には一定間隔で切欠き59が形成されることによりロック輪58はスプロケット状に形成されている。ロック操作つまみ67を手動により外方に引っ張ると、ロック軸65が図9において左方にスライドし、ロック端部66が図9に示すようにロック輪58の切欠き59の一つに進入し、ハンドル55および上記動力伝達機構の回転を阻止する。ロック操作つまみ67を手動により内方に向かって押し込むと、ロック端部66がロック輪58の切欠き59から抜け出て、ハンドル55および上記動力伝達機構を回転可能な態様にする。
A lock shaft 65 constituting a locking device is fitted in the
ハンドル支持パネル50には切り替えスイッチ70が取り付けられている。切り替えスイッチ70は特定のキーを挿入することによって操作することができるキースイッチであって、切り替えスイッチ70の切り換え操作によってソレノイド71への通電のオンオフが行われるように構成されている。ソレノイド71の駆動電源は、前記棚に内蔵されている電池その他適宜の電源装置から供給される。ソレノイド71はその下端から突出したプランジャ72を有していて、プランジャ72にはロック軸65の移動を規制することができる規制板73が固着されている。ソレノイド71に給電されていないときはプランジャ72および規制板73がロック軸65の後方直近位置に進出し、ロック軸65のロック端部66がロック輪58の切欠き59の一つに進入した態様を維持させる。ソレノイド71に給電されると、ソレノイド71はプランジャ72を吸引して規制板73をロック軸65のスライド範囲から上方に退避させ、ロック操作つまみ67を手動により内方に向かって押し込むことにより、ロック軸65のロック端部66をロック輪58の切欠き59から退避させることを可能にする。
A
ロック操作つまみ67およびロック端部66を有するロック軸65、ロック輪58は棚を移動不可能にロックすることができるロック装置を構成している。切り替えスイッチ70は棚を可動または固定に切り替えるものである。上記ロック装置が棚を移動不可能にロックしている状態で切り替えスイッチ70が固定側に切り替えられると、ソレノイド71への通電が断たれ、規制板73が上記ロック装置によるロック状態を維持する。切り替えスイッチ70が可動側に切り替えられると、ソレノイド71に通電されてプランジャ72がソレノイド71に吸引され、規制板73がロック軸65のスライド範囲から上方に逃げ、上記ロック装置によるロックを解除して棚を可動棚として機能させることができる。
The lock shaft 65 having the
図11は、上記第4の実施例の動作を示す。図11において、ステップS60で前記切り替えスイッチ70がオンになると前記ソレノイド71に通電されてロック解除可能な状態(S61)になる。ステップS62でロックが解除され、さらにステップS63で前記回転操作ハンドル55が回転操作されると、回転操作の向きに対応した向きに棚が駆動され(S64)る。ステップS62でロックが解除されなければステップS60に戻る。
FIG. 11 shows the operation of the fourth embodiment. In FIG. 11, when the
棚が停止位置まで移動すると(S65)駆動を停止し(S66)、前記ロック装置によって棚が移動不可能にロックされるのを待ち(S67)、ロックされると切り替えスイッチ70がオンか否かの判断ステップ(S68)に進む。ステップS68で切り替えスイッチ70がオフになると、図9、図10について説明したとおり、ロック装置によって棚が移動不可能にロックされた状態が維持される(S69)。また、ステップS60で切り替えスイッチ70がオンにならずオフのままになっているときも、ロック装置によって棚が移動不可能にロックされた状態が維持される(S69)。
When the shelf moves to the stop position (S65), the drive is stopped (S66), and the shelf waits for the shelf to be locked so as not to move (S67). The process proceeds to the determination step (S68). When the
このように、複数の手動式移動棚からなる棚装置においても、少なくとも一つの手動式移動棚に図9、図10に示すようなロック装置を組み込み、図11に示すような動作を行わせることにより、セキュリティ機能や多通路機能を備えた棚装置を構成することができる。 As described above, even in a shelf apparatus composed of a plurality of manual movement shelves, a lock device as shown in FIGS. 9 and 10 is incorporated in at least one manual movement shelf, and the operation as shown in FIG. 11 is performed. Thus, a shelf apparatus having a security function and a multi-passage function can be configured.
手動式移動棚にロック装置を設けることは既に知られている。上記第4の実施例が公知の手動式移動棚におけるロック装置と異なる点は、切り替えスイッチ70、ソレノイド71、規制板73を備えている点である。ソレノイド71は、切り替えスイッチ70の切り換え態様に応じてロック装置をロック態様で規制しまたこのロック態様の規制を解除するためのアクチュエータとして設けられている。したがって、アクチュエータとして機能するものであればソレノイド限定されるものではなく、例えば、モータ、流体シリンダなどを用いることができる。
It is already known to provide a locking device on a manual moving shelf. The fourth embodiment is different from a lock device in a known manual moving shelf in that a
以上説明した手動式移動棚に本発明に係る技術思想を適用したものにおいては、本発明に係る技術思想を前述の電動式移動棚に適用した実施例におけるブレーキ装置に代えてロック装置を設けている。 In the case where the technical idea according to the present invention is applied to the manual movement shelf described above, a lock device is provided instead of the brake device in the embodiment in which the technical idea according to the present invention is applied to the electric movement shelf described above. Yes.
また、上記ロック装置を電動式移動棚に適用してもよい。電動式移動棚装置においては、上記少なくとも一つの棚が機構的なロック装置によって移動不可能にロックされている状態で駆動モータに駆動電流が流れると、駆動モータが焼損する恐れがある。そこで、移動不可能にロックされている棚に隣接棚から移動指令信号が伝達されないように、ロック装置が働いている場合は隣接棚からの通信が遮断されるように構成されている。 Moreover, you may apply the said locking device to an electrically-driven movable shelf. In the electric movable shelf device, if a drive current flows through the drive motor in a state where the at least one shelf is locked so as not to be moved by a mechanical lock device, the drive motor may be burned out. Therefore, in order to prevent a movement command signal from being transmitted from the adjacent shelf to the shelf that is locked so as not to be movable, communication from the adjacent shelf is blocked when the locking device is operating.
以上説明した可動固定棚100は、通常は固定棚であって、必要に応じて一時的に移動棚として扱うこともできる。移動棚装置を構成する複数の移動棚のうちの一つとして可動固定棚100を用いることにより、上記第3の実施例のようにセキュリティ効果を得ることができる。また、複数の移動棚からなる移動棚装置を、可動固定棚100によっていくつかの移動棚群に区分すれば、多通路方式の移動棚装置を構成することができる。図12〜図15は、固定側にも可動側にも切り替えることができる可動固定棚100を用いた各種移動棚装置の例を示す。
The movable fixed
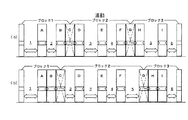
図12は、多通路方式の電動式移動棚装置の例であって、(a)〜(d)の順に多通路の形成パターンの変更例を示す。A〜Iで示す9台の電動式移動棚が配置され、これらの電動式移動棚を挟んで両側に固定棚が配置されている。9台の電動式移動棚のうちCとGで示す電動式移動棚が可動固定棚であって、これらの可動固定棚を境にしてブロック1〜3で示す3群の移動棚に分けられている。図12(a)では、ブロック1ではAとB、BとCで示す移動棚間にそれぞれ作業通路が形成され、ブロック2ではDとE、EとFで示す移動棚間に、ブロック3ではGとHで示す移動棚間と、Iで示す移動棚と固定棚との間にそれぞれ作業通路が形成されている。これら各作業通路に番号1〜6を付している。
FIG. 12 is an example of a multi-passage type electric moving shelf device, and shows an example of changing a multi-passage formation pattern in the order of (a) to (d). Nine electric moving shelves indicated by A to I are arranged, and fixed shelves are arranged on both sides of the electric moving shelves. Of the nine motorized mobile shelves, the motorized mobile shelves indicated by C and G are movable fixed shelves, divided into three groups of mobile shelves indicated by
図12(b)(c)(d)は、各移動棚のレイアウトを、図12(a)に示すレイアウトから変更する過程を示しており、図12(d)は変更を完了したレイアウトを示している。図12(b)に示すように、C,Gで示す上記二つの可動固定棚をそれぞれ左、右に向かって移動させる。この可動固定棚の移動により、ブロック1とブロック3が狭められ、ブロック2が広げられる。図12(c)は、Cで示す可動固定棚がBで示す移動棚に近接し、Gで示す可動固定棚がHで示す移動棚に近接して停止した状態を示す。図12(d)は、C,Gで示す可動固定棚が固定側に切り替えられた状態を示す。
FIGS. 12B, 12C, and 12D show a process of changing the layout of each moving shelf from the layout shown in FIG. 12A, and FIG. 12D shows the layout that has been changed. ing. As shown in FIG. 12B, the two movable fixed shelves indicated by C and G are moved toward the left and right, respectively. By the movement of the movable fixed shelf, the
C,Gで示す可動固定棚が上記のように移動させられた後固定側に切り替えられることにより、ブロック1とブロック3では一つの作業通路のみが形成可能になり、ブロック2では四つの作業通路が形成可能になっている。複数の移動棚から構成される移動棚装置は、可動固定棚を移動させることにより、複数の作業通路の形成レイアウトを必要に応じて変更することができ、変更後は可動固定棚を固定側に切り替えることにより、上記レイアウトを維持することができる。
Since the movable fixed shelf indicated by C and G is moved to the fixed side after being moved as described above, only one work path can be formed in the
図13、図14は可動固定棚を含む移動棚装置の使用例を示す。図12の例と同様にA〜Iで示す移動棚と両側の固定棚を有してなる。C,Gで示す移動棚が可動固定棚である。図13は、C,Gで示す可動固定棚を、互いに連動することなく、かつ、他の移動棚とも連動することなく単独で移動させ、移動後は固定に切り替えることができるようにした移動棚装置を示す。このように、C,Gで示す可動固定棚が非連動で動く移動棚装置は図12に示す例と同様に複数の作業通路のレイアウトを必要に応じて変更することができ、変更後のレイアウトを維持することができる。 FIG. 13 and FIG. 14 show an example of use of a movable shelf apparatus including a movable fixed shelf. Like the example of FIG. 12, it has the movement shelf shown by AI and the fixed shelf of both sides. The movable shelves indicated by C and G are movable fixed shelves. FIG. 13 is a movable shelf in which movable fixed shelves indicated by C and G are moved independently without being interlocked with each other and without being interlocked with other movable shelves and can be switched to fixed after the movement. Indicates the device. As described above, the movable shelf apparatus in which the movable fixed shelves indicated by C and G move in an interlocked manner can change the layout of a plurality of work paths as required, similarly to the example shown in FIG. Can be maintained.
図14に示す例は、移動棚、可動固定棚、固定棚の配置が図13の配置と同じであるが、C,Gで示す可動固定棚を可動側に切り替えると、可動固定棚の移動に連動して他の移動棚が移動するように構成したものである。図14(a)に示す例では、B,C,Dで示す移動棚と、F,G,Hで示す移動棚が収束し、左端の固定棚とAで示す移動棚の間、A,Bで示す移動棚の間、D,Eで示す移動棚の間、E,Fで示す移動棚の間、H,Iで示す移動棚の間、Iで示す移動棚と右端の固定棚との間に作業通路が形成されている。この状態からCで示す可動固定棚を左方に向かって移動させると、左側に近接していたBで示す移動棚も連動して移動し、Aで示す移動棚に近接すると停止し、C,Dで示す移動棚間に作業通路が形成される。同様に、Gで示す可動固定棚を右方方に向かって移動させると、右側に近接していたHで示す移動棚も連動して移動し、Iで示す移動棚に近接すると停止し、F,Gで示す移動棚間に作業通路が形成される。このようにして、通常の多通路方式の電動式移動棚装置と同様に動作させることができるとともに、複数の作業通路の形成形態を任意に変更することができる。 In the example shown in FIG. 14, the arrangement of the movable shelf, the movable fixed shelf, and the fixed shelf is the same as the arrangement in FIG. 13, but when the movable fixed shelf indicated by C and G is switched to the movable side, the movable fixed shelf is moved. The other moving shelves are configured to move in conjunction with each other. In the example shown in FIG. 14 (a), the movable shelves indicated by B, C, and D and the movable shelves indicated by F, G, and H converge, and between the leftmost fixed shelf and the movable shelf indicated by A, A and B Between the moving shelves indicated by D, E, between the moving shelves indicated by E, F, between the moving shelves indicated by H, I, and between the moving shelf indicated by I and the rightmost fixed shelf A work passage is formed in the front. When the movable fixed shelf indicated by C is moved to the left from this state, the movable shelf indicated by B that was close to the left side also moves in conjunction with the movable shelf, and stops when approaching the movable shelf indicated by A, A work path is formed between the movable shelves indicated by D. Similarly, when the movable fixed shelf indicated by G is moved toward the right side, the movable shelf indicated by H that was close to the right side also moves in conjunction with it, and stops when it approaches the movable shelf indicated by I, F , G are formed between the moving shelves. In this way, it can be operated in the same manner as a normal multi-passage type electric moving shelf device, and the formation form of a plurality of work passages can be arbitrarily changed.
図15に示す例は、電動式移動棚装置を構成する全ての移動棚を可動固定棚としたもので、それぞれの可動固定棚の切り替えスイッチを可動側に切り替えるか固定側に切り替えるかによって様々な使い方ができることを示している。図15(a)は、全ての可動固定棚を固定側に切り替えた例である。全ての可動固定棚の切り替えスイッチを可動側に切り替えれば、通常の電動式移動棚装置として動作させることができる。可動固定棚の一部を固定側に切り替え、他の可動固定棚を可動側に切り替えれば、多通路方式の電動式移動棚装置として動作させることができる。複数の可動固定棚を収束させ、少なくとも外側の可動固定棚を固定側に切り替えると、セキュリティ効果を得ることができる。 In the example shown in FIG. 15, all the movable shelves constituting the electric movable shelf apparatus are movable fixed shelves, and there are various types depending on whether the switch of each movable fixed shelf is switched to the movable side or the fixed side. It shows that it can be used. FIG. 15A shows an example in which all movable fixed shelves are switched to the fixed side. If all the movable fixed shelf changeover switches are switched to the movable side, it can be operated as an ordinary electric movable shelf device. If a part of the movable fixed shelf is switched to the fixed side and the other movable fixed shelf is switched to the movable side, it can be operated as a multi-passage type electric movable shelf apparatus. A security effect can be obtained by converging a plurality of movable fixed shelves and switching at least the outer movable fixed shelves to the fixed side.
10 電動式移動棚
12 固定棚
18 連結部材
20 制御部
25 振動検出部
26 収束制御部
27 モータ制御部
28 ブレーキ制御部
29 クラッチ制御部
30 モータ
31 ブレーキ装置
32 クラッチ
41 右操作スイッチ
42 左操作スイッチ
43 通路幅計測装置(超音波センサ)
45 振動センサ
46 収束操作部材
100 可動固定棚
DESCRIPTION OF
45
Claims (6)
前記複数の棚の少なくとも一つは、前記モータにブレーキ力を付加することができるブレーキ装置と、前記少なくとも一つの棚を可動または固定に切り替える切り替えスイッチと、を有するとともに、前記少なくとも一つの棚の移動方向前後の前記走行車輪の車輪軸が同期して回転可能に連結部材で連結されており、
前記複数の棚の少なくとも一つの前記制御部は、前記切り替えスイッチが固定側に切り替えられると前記ブレーキ装置のブレーキ力を前記モータに加え、前記切り替えスイッチが可動側に切り替えられると前記ブレーキ装置のブレーキ力を前記モータから解放するブレーキ制御部と、を備えている棚装置。 A plurality of shelves provided with a motor that moves the shelf by rotationally driving the traveling wheel, a motor control unit that controls the rotation of the motor according to a command signal, and a control unit that includes the motor control unit are arranged in a convergent and discrete manner A shelf device,
At least one of the plurality of shelves includes a brake device that can apply a braking force to the motor, and a changeover switch that switches the at least one shelf to be movable or fixed. The wheel shafts of the traveling wheels before and after the moving direction are connected by a connecting member so as to be rotatable synchronously,
At least one of the control unit of the plurality of shelves, the changeover switch is added the braking force of the brake device and Ru is switched to the fixed side to the motor, and the changeover switch is switched to the movable side of the brake device A shelf control unit that releases a braking force from the motor .
前記モータ制御部は、前記少なくとも一つの棚の操作スイッチの操作または前記隣接する棚からの信号により前記少なくとも一つの棚と前記隣接する棚を連動して移動させ、前記隣接する棚との近接を前記通路幅検出装置からの信号により検出したときモータの駆動を停止させる請求項1または2記載の棚装置。 Controller of the at least one shelf is provided with a passage width detection device for detecting the distance between the adjacent shelves, a communication receiving unit for receiving a signal from the adjacent shelf,
The motor control unit moves the at least one shelf and the adjacent shelf in conjunction with an operation of an operation switch of the at least one shelf or a signal from the adjacent shelf, and makes the proximity of the adjacent shelf close. The shelf apparatus according to claim 1 or 2, wherein the driving of the motor is stopped when detected by a signal from the passage width detecting device.
At least one of the plurality of shelves comprises a clutch interposed between the motor and the output shaft, a vibration sensor, and a clutch control unit that controls the operation of the clutch, the clutch control unit, shelf device according to any one of claims 1 to 5 for controlling the clutch to release the coupling between the motor and the output shaft by detecting a vibration said vibration sensor is above a predetermined value.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012114635A JP6014366B2 (en) | 2012-05-18 | 2012-05-18 | Shelf equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012114635A JP6014366B2 (en) | 2012-05-18 | 2012-05-18 | Shelf equipment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013240423A JP2013240423A (en) | 2013-12-05 |
| JP6014366B2 true JP6014366B2 (en) | 2016-10-25 |
Family
ID=49841956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012114635A Active JP6014366B2 (en) | 2012-05-18 | 2012-05-18 | Shelf equipment |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6014366B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7040752B2 (en) * | 2016-11-29 | 2022-03-23 | ケーエスエー株式会社 | Mobile shelves and mobile shelf equipment |
| KR101903524B1 (en) * | 2018-02-26 | 2018-10-04 | (주)캠퍼스라인 | Handle device for the mobile-rack |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2827153B2 (en) * | 1994-11-24 | 1998-11-18 | 株式会社岡村製作所 | Spread type moving shelf device |
| JP2000253935A (en) * | 1999-03-05 | 2000-09-19 | Kumahira Safe Co Inc | Base-isolated movable rack device |
| JP2002204722A (en) * | 2001-01-11 | 2002-07-23 | Murata Mach Ltd | Moving rack system |
| JP4043812B2 (en) * | 2002-03-13 | 2008-02-06 | 三進金属工業株式会社 | Rail-free moving shelf |
-
2012
- 2012-05-18 JP JP2012114635A patent/JP6014366B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013240423A (en) | 2013-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2575442C (en) | Multiple simultaneous aisle access control for a mobile storage system | |
| JP6014366B2 (en) | Shelf equipment | |
| JP3117924B2 (en) | Electric moving shelf | |
| JP6737408B1 (en) | Drive wheels, carts and equipment | |
| JP4749066B2 (en) | Electric moving shelf device | |
| KR100698010B1 (en) | Loading and unloading stand apparatus by electric mobile rack | |
| KR101219436B1 (en) | Driving apparatus for mobile rack | |
| CN103648952A (en) | Governor apparatus for elevator | |
| JP3017460B2 (en) | Electric moving shelf | |
| WO2002001559A1 (en) | Propulsion decoupling method and system for multiple track mounted robots of an automated storage library | |
| JP4674667B2 (en) | Security unit and mobile rack device | |
| JPH09299162A (en) | Movable floor type moving shelf | |
| JP4503258B2 (en) | Electric moving shelf | |
| JP3662229B2 (en) | Electric moving shelf operation device | |
| KR102604244B1 (en) | Parking Management System | |
| JP2827153B2 (en) | Spread type moving shelf device | |
| KR102678409B1 (en) | delivery robot | |
| JP3814762B2 (en) | Variable speed electric moving shelf | |
| JP5745711B1 (en) | Caster electric brake structure | |
| JP2899567B2 (en) | Safety stop device in case of running obstacle of electric moving shelf | |
| JP2003246416A (en) | Shelf facility | |
| JP2004099308A (en) | Shelf equipment | |
| JPH11239520A (en) | Moving storage shelf | |
| JP2000253935A (en) | Base-isolated movable rack device | |
| KR101223347B1 (en) | Controlling method of an auto cleaner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140407 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150423 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160920 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160926 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6014366 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |