JP5998682B2 - Encoder, code plate, drive device, and robot device - Google Patents
Encoder, code plate, drive device, and robot device Download PDFInfo
- Publication number
- JP5998682B2 JP5998682B2 JP2012149325A JP2012149325A JP5998682B2 JP 5998682 B2 JP5998682 B2 JP 5998682B2 JP 2012149325 A JP2012149325 A JP 2012149325A JP 2012149325 A JP2012149325 A JP 2012149325A JP 5998682 B2 JP5998682 B2 JP 5998682B2
- Authority
- JP
- Japan
- Prior art keywords
- pattern
- light
- light receiving
- detection signal
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 229
- 230000005540 biological transmission Effects 0.000 claims description 103
- 239000000758 substrate Substances 0.000 claims description 60
- 238000002834 transmittance Methods 0.000 claims description 6
- 238000002310 reflectometry Methods 0.000 claims 1
- UEUIKXVPXLWUDU-UHFFFAOYSA-N 4-diazoniobenzenesulfonate Chemical compound [O-]S(=O)(=O)C1=CC=C([N+]#N)C=C1 UEUIKXVPXLWUDU-UHFFFAOYSA-N 0.000 description 36
- 238000010586 diagram Methods 0.000 description 26
- 101100272412 Arabidopsis thaliana BIA1 gene Proteins 0.000 description 18
- 239000004065 semiconductor Substances 0.000 description 8
- 230000007423 decrease Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000009826 distribution Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical group [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 238000005530 etching Methods 0.000 description 3
- 238000007740 vapor deposition Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 210000001503 joint Anatomy 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000005286 illumination Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images














Landscapes
- Optical Transform (AREA)
Description
本発明は、エンコーダ、符号板、駆動装置、及びロボット装置に関する。 The present invention relates to an encoder, a code plate, a drive device, and a robot apparatus.
モータの回転軸に接続された回転体などの被駆動体の位置情報を検出する装置として、エンコーダが知られている。このようなエンコーダは、例えば、被駆動体の位置情報を示すパターンを磁気センサなどの検出素子を含むセンサ部により検出した検出信号を、コンパレータが予め定められた固定の閾値電圧と比較することにより、検出信号を二値化信号に変換し、この二値化信号に基づいて位置情報を検出する(例えば、特許文献1を参照)。このようなエンコーダでは、コンパレータの比較における基準電圧となる閾値電圧は、例えば、抵抗分圧によって生成している。 An encoder is known as a device that detects position information of a driven body such as a rotating body connected to a rotating shaft of a motor. In such an encoder, for example, a comparator detects a pattern indicating position information of a driven body by a sensor unit including a detection element such as a magnetic sensor, and the comparator compares it with a predetermined fixed threshold voltage. The detection signal is converted into a binarized signal, and position information is detected based on the binarized signal (see, for example, Patent Document 1). In such an encoder, the threshold voltage that is a reference voltage in the comparison of the comparator is generated by, for example, resistance voltage division.
しかしながら、上述のエンコーダでは、例えば、センサ部により検出した検出信号のレベルに検出素子の個体によってバラツキが生じる上、予め定められた固定の閾値電圧に基づいて二値化信号を生成している。そのため、上述のエンコーダは、例えば、ノイズなどの外乱が発生した場合に、外乱によって検出信号が上述した固定の閾値電圧をまたいで変化して、被駆動体の位置情報を誤検出する可能性がある。
このように、上述のようなエンコーダは、被駆動体の位置情報を誤検出する場合がある。
However, in the encoder described above, for example, the level of the detection signal detected by the sensor unit varies depending on the detection element, and the binarized signal is generated based on a predetermined fixed threshold voltage. Therefore, for example, when a disturbance such as noise occurs, the encoder described above may cause the detection signal to change across the above-described fixed threshold voltage due to the disturbance and erroneously detect the position information of the driven body. is there.
Thus, the encoder as described above may erroneously detect the position information of the driven body.
本発明は、上記問題を解決すべくなされたもので、その目的は、信頼性を向上させることができるエンコーダ、符号板、駆動装置、及びロボット装置を提供することにある。 The present invention has been made to solve the above problems, and an object of the present invention is to provide an encoder, a code plate, a drive device, and a robot device that can improve reliability.
上記問題を解決するために、本発明の一実施形態は、照射光を射出する光源部と、被駆動体の位置情報を示し、第1の光量と前記第1の光量を反転させた逆位相となる第2の光量とを前記照射光に生じさせるパターンを有する符号板と、前記パターンを介して前記照射光に生じた前記第1の光量に応じて、第1の検出信号を出力する第1の受光センサ部と、前記パターンを介して前記照射光に生じた前記第2の光量に応じて、第2の検出信号を出力する第2の受光センサ部と、前記第1の検出信号及び前記第2の検出信号を差動信号として、前記位置情報に対応した二値化信号を生成する二値化部と、前記二値化信号に基づいて、前記位置情報を検出する位置検出部とを備えるエンコーダである。 In order to solve the above problem, an embodiment of the present invention shows a light source unit that emits irradiation light, position information of a driven body, and a reverse phase in which the first light amount and the first light amount are reversed. in response to the first amount of light produced and the code plate, the illumination light through the pattern having a second pattern which causes the amount of light to the irradiation light becomes, the outputs of the first detection signal One light-receiving sensor unit, a second light-receiving sensor unit that outputs a second detection signal according to the second light amount generated in the irradiation light through the pattern, the first detection signal, and Using the second detection signal as a differential signal, a binarization unit that generates a binarization signal corresponding to the position information, and a position detection unit that detects the position information based on the binarization signal; it is an encoder with a.
また、本発明の一実施形態は、被駆動体の位置情報を示し、第1の光量と前記第1の光量を反転させた逆位相となる第2の光量とを光源部から射出される照射光に生じさせるパターンを備える符号板である。 In addition, according to an embodiment of the present invention, the position information of the driven body is shown, and the first light amount and the second light amount that has the opposite phase obtained by inverting the first light amount are emitted from the light source unit. it is a sign-board with a pattern that causes the light.
また、本発明の一実施形態は、被駆動体と、前記被駆動体を移動させる駆動部と、前記被駆動体に固定され、前記被駆動体の位置情報を検出する上記に記載のエンコーダとを備えることを特徴とする駆動装置である。 An embodiment of the present invention includes a driven body, a drive unit that moves the driven body, and the encoder described above that is fixed to the driven body and detects position information of the driven body. It is provided with the following.
また、本発明の一実施形態は、上記に記載の駆動装置を備えることを特徴とするロボット装置である。 Moreover, one Embodiment of this invention is a robot apparatus characterized by including the drive device as described above.
本発明によれば、信頼性を向上させることができる。 According to the present invention, reliability can be improved.
以下、本発明の一実施形態によるエンコーダについて、図面を参照して説明する。
[第1の実施形態]
本実施形態では、一例として、光学式のロータリエンコーダについて説明する。
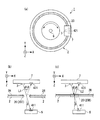
図1は、第1の実施形態によるエンコーダ1の構成の一例を示す概略構成図である。
図1において、エンコーダ1は、基板(5,7)と、符号板2(円盤)に結合された回転子6とを備えている。エンコーダ1は、回転子6(被駆動体)の位置情報(例えば、角度位置情報)を検出する。
ここで、図1(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1の構成を示し、図1(b)及び図1(c)は、Y軸方向から見た符号板2及び基板(5,7)の配置を示している。
Hereinafter, an encoder according to an embodiment of the present invention will be described with reference to the drawings.
[First Embodiment]
In this embodiment, an optical rotary encoder will be described as an example.
FIG. 1 is a schematic configuration diagram showing an example of the configuration of the
In FIG. 1, an
Here, FIG. 1A shows the configuration of the
図1に示すように、符号板2は、後述の受光センサ部に対して相対的に移動可能(例、回転可能)である。符号板2は、回転子6に結合された円盤であり、例えば、1つのトラックにより形成されたパターン20を備えている。また、基板7は、少なくとも光源部3と、受光素子421とを備えており、基板5は、少なくとも受光素子411を備えている。
As shown in FIG. 1, the
光源部3は、例えば、レーザ光を射出するレーザダイオードなどの発光素子であり、照射光を射出する。光源部3は、基板7に実装されており、照射光をパターン20に照射する。光源部3は、パターン20に対して、位置情報の検出方向であるパターン20の長手方向とは異なるパターン20の短手方向に離れた位置に配置される。ここで、位置情報の検出方向(長手方向)とは、符号板2の円周方向のことであり、図1の例では、Y軸方向が対応する。また、短手方向とは、符号板2の径方向のことであり、図1の例では、X軸方向が対応する。光源部3は、例えば、パターン20に対して短手方向から斜めに照射光を射出する。ここで、例えば、光源部3は、符号板2の垂直面(ZY平面)に対してX軸方向(短手方向)に角度θにより照射光を射出する。
The
パターン20は、回転子6の位置情報を示し、後述する第1の光量と第1の光量を反転させた第2の光量とを、光源部3が射出する照射光に生じさせる。パターン20は、例えば、M(エム)系列により絶対位置を示すアブソリュートパターンであり、照射光を透過する透過部20T(図1(b)参照)と、照射光を反射する反射部20R(図1(c)参照)とを含んで形成されている。
The
なお、パターン20は、例えば、符号板2にエッチングによりM系列を示す透過部20Tを形成し、残った部分に反射面2Rを形成することにより形成されている。また、反射面2R(反射部20R)は、例えば、アルミニウムなどの蒸着により形成されてもよいし、切削による鏡面加工(鏡面に磨く加工)を行うことにより形成されてもよい。本実施形態では、パターン20は、例えば、1つのトラックに、透過部20Tと反射部20Rとを組み合わせにより、絶対位置情報を示すように形成されている。
The
基板7と基板5とは、基板7の光源部3の発光面及び受光素子421の受光面と基板5の受光素子411の受光面とを対向させるように、符号板2を挟んで配置されている。
また、受光素子411は、図1(b)に示すように、光源部3によって射出された照射光がパターン20の透過部20Tを透過した照射光L1を受光する位置に配置されている。例えば、受光素子411は、光源部3から射出された照射光L1が、パターン20(透過部20T)を介して入射される位置に配置されている。受光素子411には、例えば、符号板2の垂直面(ZY平面)に対してX軸方向(短手方向)に角度θにより照射光L1が入射される。ここで、受光素子411によって受光される、照射光L1を含む光量が第1の光量に対応する。第1の光量は、所定の領域における光量を含み、例えば、受光素子411の受光領域における少なくとも測定方向の光量を含む。
The
In addition, as shown in FIG. 1B, the
また、受光素子421は、図1(c)に示すように、光源部3によって射出された照射光がパターン20の反射部20Rを反射した照射光L2を受光する位置に配置されている。例えば、受光素子421は、光源部3から射出された照射光L2が、パターン20(反射部20R)を介して入射される位置に配置されている。受光素子421には、例えば、符号板2の垂直面(ZY平面)に対してX軸方向(短手方向)に角度θにより照射光L2が入射される。ここで、受光素子421によって受光される、照射光L2を含む光量が第2の光量に対応する。第2の光量は、所定の領域における光量を含み、例えば、受光素子421の受光領域における少なくとも測定方向の光量を含む。
In addition, as shown in FIG. 1C, the
なお、図1(b)は、回転子6の回転位置がパターン20の透過部20Tの位置にある場合の一例を示し、図1(c)は、回転子6の回転位置がパターン20の反射部20Rの位置にある場合の一例を示している。
ここで、図1(b)の状態では、上述した第1の光量が増大し、第2の光量が低減する。また、図1(c)の状態では、上述した第1の光量が低減し、第2の光量が増大する。このように、第1の光量と第2の光量とは、互いに反転させた関係(逆位相の関係)にある。なお、光量の反転には、例えば、光量の変化の反転、光の強度分布の反転なども含まれる。すなわち、第1の光量の変化と、第2の光量の変化とは、互いに反転させた関係にある。また、光量の反転は、互いに完全に反転させた関係でもよいし、互いにほぼ反転させた関係でもよい。
1B shows an example where the rotational position of the
Here, in the state of FIG. 1B, the first light amount described above increases and the second light amount decreases. Moreover, in the state of FIG.1 (c), the 1st light quantity mentioned above reduces and the 2nd light quantity increases. As described above, the first light amount and the second light amount are in a mutually inverted relationship (reverse phase relationship). Note that the inversion of the light amount includes, for example, inversion of change in the light amount, inversion of the light intensity distribution, and the like. That is, the change in the first light amount and the change in the second light amount are in a mutually inverted relationship. Further, the reversal of the light amount may be a relationship that is completely reversed from each other, or may be a relationship that is substantially reversed from each other.
図2は、本実施形態におけるエンコーダ1の一例を示すブロック図である。
図2において、エンコーダ1は、光源部3、位置検出部40、受光センサ部41、受光センサ部42、及び二値化部60を備えている。
FIG. 2 is a block diagram illustrating an example of the
In FIG. 2, the
受光センサ部41(第1のセンサ部)は、パターン20を検出し、パターン20を介して照射光に生じた第1の光量に応じて、検出信号ABS(第1の検出信号)を出力する。受光センサ部41は、例えば、パターン20を透過した光に生じる第1の光量に応じて、検出信号ABSを出力する。すなわち、受光センサ部41は、例えば、パターン20の透過部20Tを透過した照射光L1の変化に基づいて検出信号ABSを出力する。
The light receiving sensor unit 41 (first sensor unit) detects the
また、受光センサ部41は、受光素子411、電源供給部412、抵抗413、及びアンプ部414を備えている。なお、受光センサ部41は、M系列パターンのうちの複数ビットを並列して検出するために、複数の受光素子411を備えているが、ここでは、説明上、受光検出素子群(複数の受光素子411)のうちの1つについて説明する。この複数の受光素子411は、例えば、時系列に切り替えて使用され、パターン20におけるM系列パターンを検出してもよい。
なお、上述したように、受光センサ部41(受光素子411)は、光源部3から射出された照射光が、パターン20を介して入射される位置に配置されている。
In addition, the light receiving
As described above, the light receiving sensor unit 41 (light receiving element 411) is arranged at a position where the irradiation light emitted from the
受光素子411(検出素子)は、例えば、フォトダイオードであり、パターン20の透過部20Tを透過した第1の光量(第1の光量の変化)に応じて、電流(光電流)が変化する。受光素子411は、例えば、カソード端子が電源供給部412に、アノード端子がノードN1にそれぞれ接続されている。
The light receiving element 411 (detection element) is, for example, a photodiode, and the current (photocurrent) changes according to the first light quantity (change in the first light quantity) transmitted through the
電源供給部412は、受光素子411に逆バイアスを供給する電源回路である。
抵抗413は、例えば、予め定められた所定の抵抗値を有する抵抗素子であり、一端が接地され(グランド線に接続され)、他端がノードN1に接続されている。抵抗413は、第1の光量の変化に応じた、受光素子411による電流の変化を電圧の変化に変換する。
The
The
アンプ部414は、例えば、オペアンプなどを有する増幅回路である。アンプ部414は、ノードN1から出力される信号を増幅して、検出信号ABSを二値化部60に出力する。
The
受光センサ部42(第2のセンサ部)は、パターン20を検出し、パターン20を介して照射光に生じた第2の光量に応じて、検出信号ABS(第1の検出信号)の逆相(逆位相)である検出信号/ABS(第2の検出信号)を出力する。受光センサ部42は、パターン20を反射した光に生じる第2の光量に応じて、検出信号/ABSを出力する。すなわち、受光センサ部42は、例えば、パターン20の反射部20Rを反射した照射光L2の変化に基づいて検出信号/ABSを出力する。ここで、「/ABS」における「/」は、反転信号を表す表記である。
The light receiving sensor unit 42 (second sensor unit) detects the
また、受光センサ部42は、受光素子421、電源供給部422、抵抗423、及びアンプ部424を備えている。なお、受光センサ部42は、M系列パターンのうちの複数ビットを並列して検出するために、複数の受光素子421を備えているが、ここでは、説明上、受光検出素子群(複数の受光素子411)のうちの1つについて説明する。この複数の受光素子421は、例えば、時系列に切り替えて使用され、パターン20におけるM系列パターンを検出してもよい。
なお、上述したように、受光センサ部42(受光素子421)は、光源部3から射出された照射光が、パターン20を介して入射される位置に配置されている。
The light receiving
As described above, the light receiving sensor unit 42 (light receiving element 421) is disposed at a position where the irradiation light emitted from the
受光素子421(検出素子)は、例えば、フォトダイオードであり、パターン20の反射部20Rを透過した第2の光量(第2の光量の変化)に応じて、電流(光電流)が変化する。受光素子421は、例えば、カソード端子が電源供給部422に、アノード端子がノードN2にそれぞれ接続されている。
The light receiving element 421 (detection element) is, for example, a photodiode, and the current (photocurrent) changes according to the second light quantity (change in the second light quantity) transmitted through the reflecting
電源供給部422は、受光素子421に逆バイアスを供給する電源回路である。
抵抗423は、例えば、予め定められた所定の抵抗値を有する抵抗素子であり、一端が接地され(グランド線に接続され)、他端がノードN2に接続されている。抵抗423は、第2の光量の変化に応じた、受光素子411による電流の変化を電圧の変化に変換する。
The
The
アンプ部424は、例えば、オペアンプなどを有する増幅回路である。アンプ部424は、ノードN2から出力される信号を増幅して、検出信号/ABSを二値化部60に出力する。
The
二値化部60は、受光センサ部41が出力する検出信号ABS、及び受光センサ部42が出力する検出信号/ABSを差動信号として、パターン20に対応した二値化信号DABSを生成する。二値化部60は、生成した二値化信号DABSを位置検出部40に出力する。また、二値化部60は、例えば、コンパレータ61を備えている。
The
コンパレータ61は、例えば、コンパレータ回路であり、検出信号ABSの電圧レベルと検出信号/ABSの電圧レベルとの比較に基づいて、二値化信号DABSを生成する。例えば、コンパレータ61は、検出信号ABSの電圧レベルが検出信号/ABSの電圧レベル以上である場合に、論理状態“1”を示すレベルの信号を二値化信号DABSとして出力する。また、例えば、コンパレータ61は、検出信号ABSの電圧レベルが検出信号/ABSの電圧レベル未満である場合に、論理状態“0”を示すレベルの信号を二値化信号DABSとして出力する。
The
位置検出部40は、二値化部60によって生成された二値化信号DABSに基づいて、回転子6の位置情報(例、角度情報)を検出する。位置検出部40は、二値化信号DABSによりパターン20におけるM系列パターンに対応するコードを生成し、生成したコードに対応する絶対位置情報(例、角度情報)を生成する。位置検出部40は、生成した絶対位置情報を例えば、外部コントローラなどの上位装置に出力する。
The
なお、上述した基板(7,5)は、半導体基板(半導体チップ)であってもよいし、プリント基板であってもよい。基板(7,5)が半導体基板(半導体チップ)である場合に、例えば、少なくとも受光センサ部41及び二値化部60が、基板7に半導体回路として形成され、例えば、少なくとも受光センサ部41が、基板5に半導体回路として形成されてもよい。受光素子411からアンプ部414までを同一の基板7に実装した場合に、別の基板に実装した場合に比べてノイズが検出信号に混入する可能性を低減することができる。また、受光素子421からアンプ部424までを同一の基板5に実装した場合に、別の基板に実装した場合に比べてノイズが検出信号に混入する可能性を低減することができる。
The substrate (7, 5) described above may be a semiconductor substrate (semiconductor chip) or a printed circuit board. When the substrate (7, 5) is a semiconductor substrate (semiconductor chip), for example, at least the light
次に、本実施形態におけるエンコーダ1の動作について図面を参照して説明する。
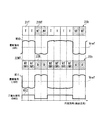
図3は、本実施形態におけるエンコーダ1の動作を示す図である。
図3において、各グラフは、回転方向(検出方向)の位置に対応する、差動信号(検出信号ABS,検出信号/ABS)、及び二値化信号DABSを示している。ここで、波形W1は、受光センサ部41が出力する差動信号(検出信号ABS)の信号波形を示し、波形W2は、受光センサ部42が出力する差動信号(検出信号/ABS)の信号波形を示している。また、波形W3は、二値化部60が出力する二値化信号DABSを示している。
また、図3において、パターン20は、透過部20Tと反射部20Rとの組み合わせにより形成されている。
Next, the operation of the
FIG. 3 is a diagram illustrating the operation of the
In FIG. 3, each graph shows a differential signal (detection signal ABS, detection signal / ABS) and a binarized signal DABS corresponding to the position in the rotation direction (detection direction). Here, the waveform W1 indicates the signal waveform of the differential signal (detection signal ABS) output from the light receiving
In FIG. 3, the
受光センサ部41は、パターン20を検出し、パターン20の透過部20Tに基づく検出信号ABSを出力する。ここで、例えば、受光素子411は、パターン20において透過部20Tである場合に、反射部20Rである場合より第1の光量が増大して、第1の光量に基づく電流が増大する。そのため、上述したノードN1は、パターン20において透過部20Tである場合に、反射部20Rである場合より高い信号レベル(電位)を出力する。また、受光素子411は、パターン20において反射部20Rである場合に、透過部20Tである場合より第1の光量が減少して、第1の光量に基づく電流が減少する。そのため、上述したノードN1は、パターン20において反射部20Rである場合に、透過部20Tである場合より低い信号レベル(電位)を出力する。アンプ部414は、ノードN1から出力される信号を増幅して、波形W1に示すような検出信号ABSを二値化部60に出力する。なお、ここで、電位Vrefは、検出信号ABSの変化の中間電位を示す。アンプ部414は、例えば、電位Vrefを基準電位として、透過部20Tと反射部20Rとで互いに反転した検出信号ABSを出力する。
The light receiving
また、受光センサ部42は、パターン20を検出し、パターン20の反射部20Rに基づく検出信号/ABSを出力する。ここで、例えば、受光素子421は、パターン20において反射部20Rである場合に、第2の光量が透過部20Tである場合より増大して、第2の光量に基づく電流が増大する。そのため、上述したノードN2は、パターン20において反射部20Rである場合に、透過部20Tである場合より高い信号レベル(電位)を出力する。また、受光素子421は、パターン20において透過部20Tである場合に、第2の光量が反射部20Rである場合より減少して、第2の光量に基づく電流が減少する。そのため、上述したノードN2は、パターン20において透過部20Tである場合に、反射部20Rである場合より低い信号レベル(電位)を出力する。アンプ部424は、ノードN2から出力される信号を増幅して、波形W2に示すような検出信号/ABSを二値化部60に出力する。アンプ部424は、例えば、電位Vrefを基準電位として、透過部20Tと反射部20Rとで互いに反転した検出信号/ABSを出力する。
In addition, the light receiving
このように、受光センサ部41及び受光センサ部42は、互いに信号レベルが反転されている2つの差動信号(検出信号ABS、及び検出信号/ABS)を生成する。ここで、互いに信号レベルが反転されている2つの差動信号(検出信号ABS、及び検出信号/ABS)とは、互いに逆位相の信号である。
In this manner, the light receiving
次に、二値化部60のコンパレータ61は、受光センサ部41が出力する検出信号ABS、及び受光センサ部42が出力する検出信号/ABSを差動信号として、パターン20に対応した二値化信号DABSを生成する。コンパレータ61は、例えば、検出信号ABSの電圧レベルが検出信号/ABSの電圧レベル以上である場合に、論理状態“1”を示すレベルの信号を二値化信号DABSとして出力する。また、例えば、コンパレータ61は、検出信号ABSの電圧レベルが検出信号/ABSの電圧レベル未満である場合に、論理状態“0”を示すレベルの信号を二値化信号DABSとして出力する。このようにして、コンパレータ61は、波形W3に示すような二値化信号DABSを出力する。
Next, the
なお、図3において、ノイズNZは、外乱などによって検出信号ABS及び検出信号/ABSに混入したノイズ信号の一例を示している。また、このノイズNZは、例えば、検出信号ABS及び検出信号/ABSの信号振幅のほぼ1/2の電圧レベル(基準電位Vref)を超えて信号変動する場合の一例を示している。基準電位Vrefは、例えば、従来のエンコーダにおいて、二値化のための基準電圧(固定の閾値電圧)に用いられる電位である。従来のエンコーダでは、基準電位VrefをまたぐようなノイズNZが検出信号ABSに混入した場合に、二値化信号がノイズNZによって反転してしまう場合がある。これに対して、本実施形態では、二値化部60は、差動信号(検出信号ABS、及び検出信号/ABS)に基づいて、二値化信号DABSを生成するため、波形W3に示すように、ノイズNZの影響を受けずに、二値化信号を生成することができる。
例えば、従来のエンコーダでは、二値化信号を生成する際のマージン(例えば、ノイズマージン)は、電圧範囲MG1となる。これに対して、本実施形態におけるエンコーダ1では、二値化信号DABSを生成する際のマージン(例えば、ノイズマージン)は、電圧範囲MG1より広い範囲である電圧範囲MG2となる。すなわち、本実施形態におけるエンコーダ1は、二値化信号DABSを生成する際のマージン(例えば、ノイズマージン)を従来の固定の閾値電圧を用いる場合に比べて広くすることができる。
In FIG. 3, noise NZ indicates an example of a noise signal mixed in the detection signal ABS and the detection signal / ABS due to disturbance or the like. Further, the noise NZ shows an example in the case where the signal fluctuates exceeding a voltage level (reference potential Vref) that is approximately ½ of the signal amplitude of the detection signal ABS and the detection signal / ABS, for example. The reference potential Vref is, for example, a potential used as a reference voltage (fixed threshold voltage) for binarization in a conventional encoder. In the conventional encoder, when noise NZ that crosses the reference potential Vref is mixed in the detection signal ABS, the binarized signal may be inverted by the noise NZ. On the other hand, in the present embodiment, the
For example, in a conventional encoder, a margin (for example, noise margin) when generating a binarized signal is the voltage range MG1. On the other hand, in the
次に、位置検出部40は、二値化部60によって生成された二値化信号DABSに基づいて、回転子6の位置情報(例、角度情報)を検出する。
Next, the
以上説明したように、本実施形態におけるエンコーダ1は、光源部3と、符号板2と、受光センサ部41と、受光センサ部42と、二値化部60と、位置検出部40とを備えている。光源部3は、照射光を射出し、符号板2は、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを照射光に生じさせるパターン20を有する。受光センサ部41は、パターン20を介して照射光に生じた第1の光量に応じて、第1の検出信号(例、検出信号ABS)を出力する。受光センサ部42は、パターン20を介して照射光に生じた第2の光量に応じて、第2の検出信号(例、検出信号/ABS)を出力する。二値化部60は、検出信号ABS及び検出信号/ABSを差動信号として、位置情報に対応した二値化信号DABSを生成する。位置検出部40は、二値化信号DABSに基づいて、位置情報(例、角度情報)を検出する。
As described above, the
これにより、本実施形態におけるエンコーダ1は、二値化部60が差動信号に基づいて、二値化信号DABSを生成するようにしたので、例えば、図3に示すようなノイズNZなどの外乱が発生した場合に、外乱によって検出信号を誤検出する可能性を低減することができる。そのため、本実施形態におけるエンコーダ1は、位置情報の誤検出を低減することができる。すなわち、本実施形態におけるエンコーダ1は、外乱に対して堅牢な位置検出を実現することができる。したがって、本実施形態におけるエンコーダ1は、回転子6の位置情報の検出において、信頼性を向上せることができる。
なお、本実施形態におけるエンコーダ1は、差動信号に基づいて、二値化信号DABSを生成するようにしたので、従来のように、基準電位Vrefを抵抗分圧により生成する必要がない。そのため、本実施形態におけるエンコーダ1は、可変抵抗等により基準電位Vrefを調整する必要がないので、製造工程を簡略化することができる。
Thereby, in the
In addition, since the
また、本実施形態では、パターン20は、照射光を透過する透過部20Tと、照射光を反射する反射部20Rとを含んで形成されている。受光センサ部41は、パターン20を透過した光に生じる第1の光量に応じて、検出信号ABSを出力し、受光センサ部42は、パターン20を反射した光に生じる第2の光量に応じて、検出信号/ABSを出力する。
これにより、本実施形態におけるエンコーダ1は、透過部20Tと反射部20Rとに基づいて、簡易は手段により、1つのパターン20により、差動信号(検出信号ABS及び検出信号/ABS)を生成することができる。
In the present embodiment, the
Accordingly, the
また、本実施形態では、パターン20は、透過部20Tと反射部20Rとの組み合わせにより位置情報を示すように形成されている。
これにより、本実施形態におけるエンコーダ1は、1つのトラックにより差動信号(検出信号ABS及び検出信号/ABS)を生成することができる。そのため、本実施形態におけるエンコーダ1は、符号板2を小型化することができる。
In the present embodiment, the
Thereby, the
また、本実施形態では、光源部3は、パターン20に対して、位置情報の検出方向(例、円周方向)であるパターン20の長手方向とは異なるパターン20の短手方向(例、径方向)に離れた位置に配置されている。受光センサ部41及び受光センサ部42のそれぞれは、光源部3から射出された照射光が、パターン20を介して入射される位置に配置されている。
これにより、光源部3が位置情報の検出方向とは異なるパターン20の短手方向からパターン20に照射光を照射するので、受光センサ部41及び受光センサ部42は、光源部3が位置情報の検出方向から照射する場合よりも効率よく照射光の光量を受光することができる。そのため、受光センサ部41及び受光センサ部42は、検出信号ABS及び検出信号/ABSの信号レベル(信号振幅)を大きくすることができるので、本実施形態におけるエンコーダ1は、二値化信号を生成する際のマージンを広くすることができる。
In the present embodiment, the
Thereby, since the
また、本実施形態では、光源部3と受光センサ部42(受光素子421)とが同一の基板7に実装されている。
これにより、本実施形態におけるエンコーダ1は、検出系(例えば、光源部3と受光センサ部(41,42)とを備えた検出ヘッダ)を小型化することができる。また、光源部3の配置と受光素子421の配置との両方の調整を同時に行うことができるため、本実施形態におけるエンコーダ1bは、光源部3及び受光素子421の配置を調整する製造工程を簡略化することができる。
In the present embodiment, the
Thereby, the
なお、本実施形態における符号板2は、回転子6(被駆動体)の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを光源部3から射出される照射光に生じさせるパターン20を備えている。
これにより、エンコーダ1に対して差動信号(検出信号ABS、検出信号/ABS)に基づいて位置情報を検出させるようにできるので、位置情報の誤検出を低減することができる。したがって、本実施形態における符号板2は、エンコーダ1と同様に、信頼性を向上せることができる。また、本実施形態における符号板2は、上述したエンコーダ1と同様の効果を得ることができる。
In addition, the code |
Thus, the position information can be detected by the
次に、第2の実施形態について、図面を参照して説明する。
[第2の実施形態]
本実施形態では、第1の実施形態と同様に、一例として、ロータリエンコーダについて説明する。
図4は、第2の実施形態によるエンコーダ1aの構成の一例を示す概略構成図である。
図4において、エンコーダ1aは、基板7aと、符号板2a(円盤)に結合された回転子6とを備えている。エンコーダ1aは、回転子6(被駆動体)の位置情報(例えば、角度位置情報)を検出する。
Next, a second embodiment will be described with reference to the drawings.
[Second Embodiment]
In this embodiment, as in the first embodiment, a rotary encoder will be described as an example.
FIG. 4 is a schematic configuration diagram showing an example of the configuration of the
In FIG. 4, the
ここで、図4(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1aの構成を示し、図4(b)及び図4(c)は、Y軸方向から見た符号板2a及び基板7aの配置を示している。なお、図4において、図1と同一の構成については同一の符号を付し、その説明を省略する。
本実施形態では、反射式のパターン20a(2トラックの反射パターン(21,22))を用いて、差動信号(検出信号ABS及び検出信号/ABS)を生成する場合の一例について説明する。
Here, FIG. 4A shows the configuration of the
In the present embodiment, an example of generating a differential signal (detection signal ABS and detection signal / ABS) using the
図4に示すように、符号板2aは、回転子6に結合された円盤であり、例えば、反射パターン(21,22)の2つのトラックにより形成されたパターン20aを備えている。また、基板7aは、少なくとも光源部3と、受光素子411と、受光素子421とを備えている。
As shown in FIG. 4, the
パターン20aは、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを、光源部3が射出する照射光に生じさせる。パターン20aは、第1の光量を生じさせる反射パターン21と、第2の光量を生じさせる反射パターン22とを有している。
The
反射パターン21(第1パターン)は、反射部21Rと非反射部21NRとの組み合わせにより形成されており、例えば、M(エム)系列により絶対位置を示すアブソリュートパターンである。ここで、非反射部21NRは、反射部21Rより反射率の低い部分である。
The reflective pattern 21 (first pattern) is formed by a combination of a
反射パターン22(第2パターン)は、反射部22Rと非反射部22NRとの組み合わせにより形成されており、反射パターン21の反転パターンにより形成されている。すなわち、反射パターン22は、反射パターン21の反射部21Rに対応する位置が非反射部22NRにより形成されており、反射パターン21の非反射部21NRに対応する位置が反射部22Rにより形成されている。ここで、非反射部22NRは、反射部22Rより反射率の低い部分である。
The reflective pattern 22 (second pattern) is formed by a combination of the
なお、パターン20aは、例えば、アルミニウムなどの蒸着により符号板2aにM系列を示す反射面(反射部21R、反射部22R)を形成してもよいし、切削による鏡面加工(鏡面に磨く加工)を行うことにより形成されてもよい。
In addition, the
基板7aは、基板7aの光源部3の発光面及び受光素子(411,421)の受光面とパターン20aの反射部(21R,22R)とを対向させるように配置されている。
また、受光素子411は、図4(b)に示すように、光源部3によって射出された照射光が反射パターン21の反射部21Rを反射した照射光L1aを受光する位置に配置されている。例えば、受光素子411は、光源部3から射出された照射光L1aが、反射パターン21(反射部21R)を介して入射される位置に配置されている。ここで、受光素子411によって受光される、照射光L1aを含む光量が第1の光量に対応する。
The
4B, the
また、受光素子421は、図4(c)に示すように、光源部3によって射出された照射光が反射パターン22の反射部22Rを反射した照射光L2aを受光する位置に配置されている。例えば、受光素子421は、光源部3から射出された照射光L2aが、反射パターン22(反射部22R)を介して入射される位置に配置されている。ここで、受光素子421によって受光される、照射光L2aを含む光量が第2の光量に対応する。
なお、図4(b)及び図4(c)に示すように、反射パターン21と反射パターン22とは、互いに反転したパターンに形成されている。
Further, as shown in FIG. 4C, the
Note that, as shown in FIGS. 4B and 4C, the
また、図4(b)は、回転子6の回転位置が反射パターン21の反射部21Rの位置、且つ反射パターン22の非反射部22NRの位置にある場合の一例を示している。この場合、上述した第1の光量が増大し、第2の光量が低減する。
また、図4(c)は、回転子6の回転位置が反射パターン21の非反射部21NRの位置、且つ反射パターン22の反射部22Rの位置にある場合の一例を示している。この場合、上述した第1の光量が低減し、第2の光量が増大する。このように、第1の光量と第2の光量とは、互いに反転させた関係にある。なお、光量の反転には、例えば、光量の変化の反転、光の強度分布の反転なども含まれる。すなわち、第1の光量の変化と、第2の光量の変化とは、互いに反転させた関係にある。
FIG. 4B shows an example in which the rotational position of the
4C shows an example in which the rotational position of the
なお、本実施形態におけるエンコーダ1aの構成を示すブロック図は、図2と同様であるので、ここでは説明を省略する。
In addition, since the block diagram which shows the structure of the
次に、本実施形態におけるエンコーダ1aの動作について図面を参照して説明する。
図5は、本実施形態におけるエンコーダ1aの動作を示す図である。
図5において、各グラフは、回転方向(検出方向)の位置に対応する、差動信号(検出信号ABS,検出信号/ABS)、及び二値化信号DABSを示している。ここで、波形W4は、受光センサ部41が出力する差動信号(検出信号ABS)の信号波形を示し、波形W5は、受光センサ部42が出力する差動信号(検出信号/ABS)の信号波形を示している。また、波形W6は、二値化部60が出力する二値化信号DABSを示している。
また、図5に示すように、反射パターン21は、反射部21Rと非反射部21NRとの組み合わせにより形成されており、反射パターン22は、反射部22Rと非反射部22NRとの組み合わせにより形成されている。
Next, the operation of the
FIG. 5 is a diagram showing the operation of the
In FIG. 5, each graph shows a differential signal (detection signal ABS, detection signal / ABS) and a binarized signal DABS corresponding to the position in the rotation direction (detection direction). Here, the waveform W4 indicates the signal waveform of the differential signal (detection signal ABS) output from the light receiving
Further, as shown in FIG. 5, the
受光センサ部41は、反射パターン21に基づく第1の光量に応じて、検出信号ABSを出力する。受光センサ部41は、例えば、反射パターン21を検出し、反射パターン21の反射部21Rに基づく検出信号ABSを出力する。ここで、例えば、受光素子411は、反射パターン21において反射部21Rである場合に、非反射部21NRである場合より第1の光量が増大して、第1の光量に基づく電流が増大する。そのため、上述したノードN1は、反射パターン21において反射部21Rである場合に、非反射部21NRである場合より高い信号レベル(電位)を出力する。また、受光素子411は、反射パターン21において非反射部21NRである場合に、反射部21Rである場合より第1の光量が減少して、第1の光量に基づく電流が減少する。そのため、上述したノードN1は、反射パターン21において非反射部21NRである場合に、反射部21Rである場合より低い信号レベル(電位)を出力する。アンプ部414は、ノードN1から出力される信号を増幅して、波形W4に示すような検出信号ABSを二値化部60に出力する。なお、ここで、電位Vrefは、検出信号ABSの変化の中間電位を示す。アンプ部414は、例えば、電位Vrefを基準電位として、反射部21Rと非反射部21NRとで互いに反転した検出信号ABSを出力する。
The light receiving
また、受光センサ部42は、反射パターン22に基づく第2の光量に応じて、検出信号/ABSを出力する。受光センサ部42は、例えば、反射パターン22を検出し、反射パターン22の反射部22Rに基づく検出信号/ABSを出力する。ここで、例えば、受光素子421は、反射パターン22において反射部22Rである場合に、非反射部22NRである場合より第2の光量が増大して、第2の光量に基づく電流が増大する。そのため、上述したノードN2は、反射パターン22において反射部22Rである場合に、非反射部22NRである場合より高い信号レベル(電位)を出力する。また、受光素子421は、反射パターン22において非反射部22NRである場合に、反射部22Rである場合より第2の光量が減少して、第2の光量に基づく電流が減少する。そのため、上述したノードN2は、反射パターン22において非反射部22NRである場合に、反射部22Rである場合より低い信号レベル(電位)を出力する。アンプ部424は、ノードN2から出力される信号を増幅して、波形W5に示すような検出信号/ABSを二値化部60に出力する。アンプ部424は、例えば、電位Vrefを基準電位として、反射部22Rと非反射部22NRとで互いに反転した検出信号/ABSを出力する。
In addition, the light receiving
このように、受光センサ部41及び受光センサ部42は、互いに信号レベルが反転されている2つの差動信号(検出信号ABS、及び検出信号/ABS)を生成する。
続く、二値化部60のコンパレータ61の動作は、第1の実施形態の動作と同様であり、コンパレータ61は、波形W6に示すような二値化信号DABSを出力する。
In this manner, the light receiving
The subsequent operation of the
以上説明したように、本実施形態におけるエンコーダ1aは、光源部3と、符号板2aと、受光センサ部41と、受光センサ部42と、二値化部60と、位置検出部40とを備えている。光源部3は、照射光を射出し、符号板2aは、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを照射光に生じさせるパターン20aを有する。パターン20aは、第1の光量を生じさせる反射パターン21と、反射パターン21の反転パターンにより形成され、第2の光量を生じさせる反射パターン22とを有する。受光センサ部41は、反射パターン21に基づく第1の光量に応じて、第1の検出信号(例、検出信号ABS)を出力する。受光センサ部42は、反射パターン22に基づく第2の光量に応じて、第2の検出信号(例、検出信号/ABS)を出力する。二値化部60は、検出信号ABS及び検出信号/ABSを差動信号として、位置情報に対応した二値化信号DABSを生成する。位置検出部40は、二値化信号DABSに基づいて、位置情報(例、角度情報)を検出する。
As described above, the
これにより、本実施形態におけるエンコーダ1aは、第1の実施形態と同様に、例えば、図3に示すようなノイズNZなどの外乱が発生した場合に、外乱によって検出信号を誤検出する可能性を低減することができる。そのため、本実施形態におけるエンコーダ1aは、位置情報の誤検出を低減することができる。したがって、本実施形態におけるエンコーダ1aは、第1の実施形態と同様に、回転子6の位置情報の検出において、信頼性を向上せることができる。
As a result, the
また、本実施形態におけるエンコーダ1aは、パターン20aを反射パターン(21,22)だけで形成し、第1の実施形態のように透過部20Tを形成する必要がないので、第1の実施形態に比べて、符号板2aの製造工程を簡略化することができる。また、基板7aに、光源部3と受光素子(411,422)を実装することができ、第1の実施形態における基板5が不要になるので、本実施形態におけるエンコーダ1aは、第1の実施形態に比べて、構成を簡略化することができる。また、本実施形態におけるエンコーダ1aは、基板7aに受光素子411を実装することにより、受光素子411の配置の調整する製造工程を簡略化することができる。
Further, the
次に、第3の実施形態について、図面を参照して説明する。
[第3の実施形態]
本実施形態では、第1の実施形態と同様に、一例として、ロータリエンコーダについて説明する。
図6は、第3の実施形態によるエンコーダ1bの構成の一例を示す概略構成図である。
図6において、エンコーダ1bは、基板(7b,5a)と、符号板2b(円盤)に結合された回転子6とを備えている。エンコーダ1bは、回転子6(被駆動体)の位置情報(例えば、角度位置情報)を検出する。
Next, a third embodiment will be described with reference to the drawings.
[Third Embodiment]
In this embodiment, as in the first embodiment, a rotary encoder will be described as an example.
FIG. 6 is a schematic configuration diagram showing an example of the configuration of the
In FIG. 6, the
ここで、図6(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1bの構成を示し、図6(b)及び図6(c)は、Y軸方向から見た符号板2b及び(7b,5a)の配置を示している。なお、図6において、図1と同一の構成については同一の符号を付し、その説明を省略する。
本実施形態では、反射式のパターン20b(2トラックの透過パターン(21a,22a))を用いて、差動信号(検出信号ABS及び検出信号/ABS)を生成する場合の一例について説明する。
Here, FIG. 6A shows the configuration of the
In the present embodiment, an example will be described in which differential signals (detection signal ABS and detection signal / ABS) are generated using a
図6に示すように、符号板2bは、回転子6に結合された円盤であり、例えば、透過パターン(21a,22a)の2つのトラックにより形成されたパターン20bを備えている。また、基板7bは、少なくとも光源部3を備え、基板5aは、少なくとも受光素子411と受光素子421とを備えている。
As shown in FIG. 6, the
パターン20bは、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを、光源部3が射出する照射光に生じさせる。パターン20bは、第1の光量を生じさせる透過パターン21aと、第2の光量を生じさせる透過パターン22aとを有している。
The
透過パターン21a(第1パターン)は、透過部21Tと非透過部21NTとの組み合わせにより形成されており、例えば、M(エム)系列により絶対位置を示すアブソリュートパターンである。ここで、非透過部21NTは、透過部21Tより光の透過率の低い部分である。
The
透過パターン22a(第2パターン)は、透過部22Tと非透過部22NTとの組み合わせにより形成されており、透過パターン21aの反転パターンにより形成されている。すなわち、透過パターン22aは、透過パターン21aの透過部21Tに対応する位置が非透過部22NTにより形成されており、透過パターン21aの非透過部21NTに対応する位置が透過部22Tにより形成されている。ここで、非透過部22NTは、透過部22Tより光の透過率の低い部分である。
なお、パターン20aは、例えば、符号板2bにエッチングによりM系列を示す透過部20Tを形成してもよい。
The
The
基板7bと基板5aとは、基板7bの光源部3の発光面と、基板5aの受光素子411及び受光素子421の受光面とを対向させるように、符号板2bを挟んで配置されている。
また、受光素子411は、図6(b)に示すように、光源部3によって射出された照射光が透過パターン21aの透過部21Tを透過した照射光L1bを受光する位置に配置されている。例えば、受光素子411は、光源部3から射出された照射光L1bが、透過パターン21a(透過部21T)を介して入射される位置に配置されている。ここで、受光素子411によって受光される、照射光L1bを含む光量が第1の光量に対応する。
The
Further, as shown in FIG. 6B, the
また、受光素子421は、図6(c)に示すように、光源部3によって射出された照射光が透過パターン22aの透過部22Tを透過した照射光L2bを受光する位置に配置されている。例えば、受光素子421は、光源部3から射出された照射光L2bが、透過パターン22a(透過部22T)を介して入射される位置に配置されている。ここで、受光素子421によって受光される、照射光L2bを含む光量が第2の光量に対応する。
なお、図6(b)及び図6(c)に示すように、透過パターン21aと透過パターン22aとは、互いに反転したパターンに形成されている。
Further, as shown in FIG. 6C, the
Note that, as shown in FIGS. 6B and 6C, the
また、図6(b)は、回転子6の回転位置が透過パターン21aの透過部21Tの位置、且つ透過パターン22aの非透過部22NTの位置にある場合の一例を示している。この場合、上述した第1の光量が増大し、第2の光量が低減する。
また、図6(c)は、回転子6の回転位置が透過パターン21aの非透過部21NTの位置、且つ透過パターン22aの透過部22Tの位置にある場合の一例を示している。この場合、上述した第1の光量が低減し、第2の光量が増大する。このように、第1の光量と第2の光量とは、互いに反転させた関係にある。なお、光量の反転には、例えば、光量の変化の反転、光の強度分布の反転なども含まれる。すなわち、第1の光量の変化と、第2の光量の変化とは、互いに反転させた関係にある。
FIG. 6B shows an example where the rotational position of the
FIG. 6C shows an example in which the rotation position of the
なお、本実施形態におけるエンコーダ1bの構成を示すブロック図は、図2と同様であるので、ここでは説明を省略する。
In addition, since the block diagram which shows the structure of the
次に、本実施形態におけるエンコーダ1bの動作について図面を参照して説明する。
図7は、本実施形態におけるエンコーダ1bの動作を示す図である。
図7において、各グラフは、回転方向(検出方向)の位置に対応する、差動信号(検出信号ABS,検出信号/ABS)、及び二値化信号DABSを示している。ここで、波形W7は、受光センサ部41が出力する差動信号(検出信号ABS)の信号波形を示し、波形W8は、受光センサ部42が出力する差動信号(検出信号/ABS)の信号波形を示している。また、波形W9は、二値化部60が出力する二値化信号DABSを示している。
また、図7に示すように、透過パターン21aは、透過部21Tと非透過部21NTとの組み合わせにより形成されており、透過パターン22aは、透過部22Tと非透過部22NTとの組み合わせにより形成されている。
Next, the operation of the
FIG. 7 is a diagram illustrating the operation of the
In FIG. 7, each graph shows a differential signal (detection signal ABS, detection signal / ABS) and a binarized signal DABS corresponding to the position in the rotation direction (detection direction). Here, the waveform W7 indicates the signal waveform of the differential signal (detection signal ABS) output from the light receiving
As shown in FIG. 7, the
受光センサ部41は、透過パターン21aに基づく第1の光量に応じて、検出信号ABSを出力する。受光センサ部41は、例えば、透過パターン21aを検出し、透過パターン21aの透過部21Tに基づく検出信号ABSを出力する。ここで、例えば、受光素子411は、透過パターン21aにおいて透過部21Tである場合に、非透過部21NTである場合より第1の光量が増大して、第1の光量に基づく電流が増大する。そのため、上述したノードN1は、透過パターン21aにおいて透過部21Tである場合に、非透過部21NTである場合より高い信号レベル(電位)を出力する。また、受光素子411は、透過パターン21aにおいて非透過部21NTである場合に、透過部21Tである場合より第1の光量が減少して、第1の光量に基づく電流が減少する。そのため、上述したノードN1は、透過パターン21aにおいて非透過部21NTである場合に、透過部21Tである場合より低い信号レベル(電位)を出力する。アンプ部414は、ノードN1から出力される信号を増幅して、波形W7に示すような検出信号ABSを二値化部60に出力する。なお、ここで、電位Vrefは、検出信号ABSの変化の中間電位を示す。アンプ部414は、例えば、電位Vrefを基準電位として、透過部21Tと非透過部21NTとで互いに反転した検出信号ABSを出力する。
The light receiving
また、受光センサ部42は、透過パターン22aに基づく第2の光量に応じて、検出信号/ABSを出力する。受光センサ部42は、例えば、透過パターン22aを検出し、透過パターン22aの透過部22Tに基づく検出信号/ABSを出力する。ここで、例えば、受光素子421は、透過パターン22aにおいて透過部22Tである場合に、非透過部22NTである場合より第2の光量が増大して、第2の光量に基づく電流が増大する。そのため、上述したノードN2は、透過パターン22aにおいて透過部22Tである場合に、非透過部22NTである場合より高い信号レベル(電位)を出力する。また、受光素子421は、透過パターン22aにおいて非透過部22NTである場合に、透過部22Tである場合より第2の光量が減少して、第2の光量に基づく電流が減少する。そのため、上述したノードN2は、透過パターン22aにおいて非透過部22NTである場合に、透過部22Tである場合より低い信号レベル(電位)を出力する。アンプ部424は、ノードN2から出力される信号を増幅して、波形W8に示すような検出信号/ABSを二値化部60に出力する。アンプ部424は、例えば、電位Vrefを基準電位として、透過部22Tと非透過部22NTとで互いに反転した検出信号/ABSを出力する。
In addition, the light receiving
このように、受光センサ部41及び受光センサ部42は、互いに信号レベルが反転されている2つの差動信号(検出信号ABS、及び検出信号/ABS)を生成する。
続く、二値化部60のコンパレータ61の動作は、第1の実施形態の動作と同様であり、コンパレータ61は、波形W9に示すような二値化信号DABSを出力する。
In this manner, the light receiving
The subsequent operation of the
以上説明したように、本実施形態におけるエンコーダ1bは、光源部3と、符号板2bと、受光センサ部41と、受光センサ部42と、二値化部60と、位置検出部40とを備えている。光源部3は、照射光を射出し、符号板2bは、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを照射光に生じさせるパターン20bを有する。パターン20bは、第1の光量を生じさせる透過パターン21aと、透過パターン21aの反転パターンにより形成され、第2の光量を生じさせる透過パターン22aとを有する。受光センサ部41は、透過パターン21aに基づく第1の光量に応じて、第1の検出信号(例、検出信号ABS)を出力する。受光センサ部42は、透過パターン22aに基づく第2の光量に応じて、第2の検出信号(例、検出信号/ABS)を出力する。二値化部60は、検出信号ABS及び検出信号/ABSを差動信号として、位置情報に対応した二値化信号DABSを生成する。位置検出部40は、二値化信号DABSに基づいて、位置情報(例、角度情報)を検出する。
As described above, the
これにより、本実施形態におけるエンコーダ1bは、第1の実施形態と同様に、例えば、図3に示すようなノイズNZなどの外乱が発生した場合に、外乱によって検出信号を誤検出する可能性を低減することができる。そのため、本実施形態におけるエンコーダ1bは、位置情報の誤検出を低減することができる。したがって、本実施形態におけるエンコーダ1bは、第1の実施形態と同様に、回転子6の位置情報の検出において、信頼性を向上せることができる。
As a result, the
また、本実施形態におけるエンコーダ1bは、パターン20bを透過パターン(21a,22a)だけで形成し、第1の実施形態のように反射部20Rを形成する必要がないので、第1の実施形態に比べて、符号板2bの製造工程を簡略化することができる。また、本実施形態におけるエンコーダ1bは、基板5aに受光素子411及び受光素子421を実装することにより、受光素子411の配置と受光素子421の配置との両方の調整を同時に行うことができる。そのため、本実施形態におけるエンコーダ1bは、受光素子(411,421)の配置を調整する製造工程を簡略化することができる。
Further, the
次に、第4の実施形態について、図面を参照して説明する。
[第4の実施形態]
本実施形態では、第1の実施形態と同様に、一例として、ロータリエンコーダについて説明する。
図8は、第4の実施形態によるエンコーダ1cの構成の一例を示す概略構成図である。
図8において、エンコーダ1cは、基板(7c,5b)と、符号板2c(円盤)に結合された回転子6とを備えている。エンコーダ1cは、回転子6(被駆動体)の位置情報(例えば、角度位置情報)を検出する。
Next, a fourth embodiment will be described with reference to the drawings.
[Fourth Embodiment]
In this embodiment, as in the first embodiment, a rotary encoder will be described as an example.
FIG. 8 is a schematic configuration diagram illustrating an example of a configuration of an
In FIG. 8, an
ここで、図8(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1cの構成を示し、図8(b)及び図8(c)は、Y軸方向から見た符号板2c及び基板(7c,5b)の配置を示している。なお、図8において、図1と同一の構成については同一の符号を付し、その説明を省略する。
本実施形態では、パターン20c(透過パターン21b,反射パターン22bの2トラック)を用いて、差動信号(検出信号ABS及び検出信号/ABS)を生成する場合の一例について説明する。
Here, FIG. 8A shows the configuration of the
In the present embodiment, an example in which a differential signal (detection signal ABS and detection signal / ABS) is generated using the
図8に示すように、符号板2cは、回転子6に結合された円盤であり、例えば、透過パターン21bと反射パターン22bとの2つのトラックにより形成されたパターン20cを備えている。また、基板7cは、少なくとも光源部3及び受光素子421を備え、基板5bは、少なくとも受光素子411を備えている。
As shown in FIG. 8, the
パターン20cは、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを、光源部3が射出する照射光に生じさせる。例えば、パターン20cは、照射光を透過する透過部21Tと、照射光を反射する反射部22Rとを含んで形成され、パターン20cを透過した光に第1の光量を生じさせるとともに、パターン20cを反射した光に第2の光量を生じさせる。パターン20cは、第1の光量を生じさせる透過パターン21bと、第2の光量を生じさせる反射パターン22bとを有している。
The
透過パターン21b(第1パターン)は、透過部21Tと非透過部21NTとの組み合わせにより形成されており、例えば、M(エム)系列により絶対位置を示すアブソリュートパターンである。ここで、非透過部21NTは、透過部21Tより光の透過率の低い部分である。
The
反射パターン22b(第2パターン)は、反射部22Rと非反射部22NRとの組み合わせにより形成されている。例えば、反射パターン22bは、透過パターン21bの透過部21Tに対応する位置が非反射部22NRにより形成されており、透過パターン21bの非透過部21NTに対応する位置が反射部22Rにより形成されている。ここで、非反射部22NRは、反射部22Rより光の反射率の低い部分である。なお、本実施形態において、非透過部21NTと非反射部22NRとは、同一の構成により形成されている。
なお、パターン20cは、例えば、符号板2cにエッチングによりM系列を示す透過部21Tを形成することにより透過パターン21bが形成されている。また、例えば、アルミニウムなどの蒸着又は切削による鏡面加工(鏡面に磨く加工)によりM系列の反転パターンを示す反射部22Rを形成することにより反射パターン22bが形成されている。
The
The
基板7cと基板5bとは、基板7cの光源部3の発光面及び受光素子421と、基板5bの受光素子411の受光面とを対向させるように、符号板2cを挟んで配置されている。
また、受光素子411は、図8(b)に示すように、光源部3によって射出された照射光が透過パターン21bの透過部21Tを透過した照射光L1cを受光する位置に配置されている。例えば、受光素子411は、光源部3から射出された照射光L1cが、透過パターン21b(透過部21T)を介して入射される位置に配置されている。ここで、受光素子411によって受光される、照射光L1cを含む光量が第1の光量に対応する。
The
Further, as shown in FIG. 8B, the
また、受光素子421は、図8(c)に示すように、光源部3によって射出された照射光が反射パターン22bの反射部22Rを透過した照射光L2cを受光する位置に配置されている。例えば、受光素子421は、光源部3から射出された照射光L2cが、反射パターン22b(反射部22R)を介して入射される位置に配置されている。ここで、受光素子421によって受光される、照射光L2cを含む光量が第2の光量に対応する。
Further, as shown in FIG. 8C, the
また、図8(b)は、回転子6の回転位置が透過パターン21bの透過部21Tの位置、且つ反射パターン22bの非透過部22NT(非反射部22NR)の位置にある場合の一例を示している。この場合、上述した第1の光量が増大し、第2の光量が低減する。
また、図8(c)は、回転子6の回転位置が透過パターン21bの非透過部21NTの位置、且つ反射パターン22bの反射部22Rの位置にある場合の一例を示している。この場合、上述した第1の光量が低減し、第2の光量が増大する。このように、第1の光量と第2の光量とは、互いに反転させた関係にある。なお、光量の反転には、例えば、光量の変化の反転、光の強度分布の反転なども含まれる。すなわち、第1の光量の変化と、第2の光量の変化とは、互いに反転させた関係にある。
FIG. 8B shows an example where the rotational position of the
FIG. 8C shows an example in which the rotational position of the
なお、本実施形態におけるエンコーダ1cの構成を示すブロック図は、図2と同様であるので、ここでは説明を省略する。
In addition, since the block diagram which shows the structure of the
次に、本実施形態におけるエンコーダ1cの動作について図面を参照して説明する。
図9は、本実施形態におけるエンコーダ1cの動作を示す図である。
図9において、各グラフは、回転方向(検出方向)の位置に対応する、差動信号(検出信号ABS,検出信号/ABS)、及び二値化信号DABSを示している。ここで、波形W10は、受光センサ部41が出力する差動信号(検出信号ABS)の信号波形を示し、波形W11は、受光センサ部42が出力する差動信号(検出信号/ABS)の信号波形を示している。また、波形W12は、二値化部60が出力する二値化信号DABSを示している。
また、図9に示すように、透過パターン21bは、透過部21Tと非透過部21NTとの組み合わせにより形成されており、反射パターン22bは、反射部22Rと非反射部22NR(非透過部22NT)との組み合わせにより形成されている。
Next, the operation of the
FIG. 9 is a diagram illustrating the operation of the
In FIG. 9, each graph shows a differential signal (detection signal ABS, detection signal / ABS) and a binarized signal DABS corresponding to the position in the rotation direction (detection direction). Here, the waveform W10 shows the signal waveform of the differential signal (detection signal ABS) output from the light receiving
As shown in FIG. 9, the
受光センサ部41は、透過パターン21bに基づく第1の光量に応じて、検出信号ABSを出力する。受光センサ部41は、例えば、透過パターン21bを検出し、透過パターン21bの透過部21Tに基づく検出信号ABSを出力する。ここで、受光センサ部41は、第3の実施形態の場合と同様に動作し、波形W10に示すような検出信号ABSを二値化部60に出力する。なお、ここで、電位Vrefは、検出信号ABSの変化の中間電位を示す。アンプ部414は、例えば、電位Vrefを基準電位として、透過部21Tと非透過部21NTとで互いに反転した検出信号ABSを出力する。
The light receiving
また、受光センサ部42は、反射パターン22bに基づく第2の光量に応じて、検出信号/ABSを出力する。受光センサ部42は、例えば、反射パターン22bを検出し、反射パターン22bの反射部22Rに基づく検出信号/ABSを出力する。ここで、受光センサ部42は、第2の実施形態の場合と同様に動作し、波形W11に示すような検出信号/ABSを二値化部60に出力する。アンプ部424は、例えば、電位Vrefを基準電位として、反射部22Rと非反射部22NRとで互いに反転した検出信号/ABSを出力する。
Further, the light receiving
このように、受光センサ部41及び受光センサ部42は、互いに信号レベルが反転されている2つの差動信号(検出信号ABS、及び検出信号/ABS)を生成する。
続く、二値化部60のコンパレータ61の動作は、第1の実施形態の動作と同様であり、コンパレータ61は、波形W12に示すような二値化信号DABSを出力する。
In this manner, the light receiving
The subsequent operation of the
以上説明したように、本実施形態におけるエンコーダ1cは、光源部3と、符号板2bと、受光センサ部41と、受光センサ部42と、二値化部60と、位置検出部40とを備えている。光源部3は、照射光を射出し、符号板2cは、回転子6の位置情報を示し、第1の光量と第1の光量を反転させた第2の光量とを照射光に生じさせるパターン20cを有する。パターン20cは、第1の光量を生じさせる透過パターン21bと、第2の光量を生じさせる反射パターン22bとを有する。パターン20cの透過パターン21bは、透過部21Tと、透過部21Tより透過率の低い非透過部21NTとの組み合わせにより形成されている。パターン20cの反射パターン22bは、反射部22Rと、反射部22Rより反射率の低い非反射部22NRとの組み合わせにより形成されている。受光センサ部41は、透過パターン21bに基づく第1の光量に応じて、第1の検出信号(例、検出信号ABS)を出力する。受光センサ部42は、反射パターン22bに基づく第2の光量に応じて、第2の検出信号(例、検出信号/ABS)を出力する。二値化部60は、検出信号ABS及び検出信号/ABSを差動信号として、位置情報に対応した二値化信号DABSを生成する。位置検出部40は、二値化信号DABSに基づいて、位置情報(例、角度情報)を検出する。
As described above, the
これにより、本実施形態におけるエンコーダ1cは、第1の実施形態と同様に、例えば、図3に示すようなノイズNZなどの外乱が発生した場合に、外乱によって検出信号を誤検出する可能性を低減することができる。そのため、本実施形態におけるエンコーダ1cは、位置情報の誤検出を低減することができる。したがって、本実施形態におけるエンコーダ1cは、第1の実施形態と同様に、回転子6の位置情報の検出において、信頼性を向上せることができる。
As a result, the
次に、第5の実施形態について、図面を参照して説明する。
[第5の実施形態]
本実施形態では、第1の実施形態と同様に、一例として、ロータリエンコーダについて説明する。
図10は、第5の実施形態によるエンコーダ1dの構成の一例を示す概略構成図である。
図10において、エンコーダ1dは、基板(7d,5c)と、符号板2d(円盤)に結合された回転子6とを備えている。エンコーダ1dは、回転子6(被駆動体)の位置情報(例えば、角度位置情報)を検出する。
Next, a fifth embodiment will be described with reference to the drawings.
[Fifth Embodiment]
In this embodiment, as in the first embodiment, a rotary encoder will be described as an example.
FIG. 10 is a schematic configuration diagram illustrating an example of a configuration of an
In FIG. 10, an
ここで、図10(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1dの構成を示し、図10(b)及び図10(c)は、Y軸方向から見た符号板2d及び基板(7d,5c)の配置を示している。また、図10において、図1と同一の構成については同一の符号を付し、その説明を省略する。
Here, FIG. 10A shows the configuration of the
本実施形態では、パターン20dがM系列に代えて、グレイコードを用いたマルチトラックにより絶対位置情報を示す場合の一例について説明する。
図10に示すように、符号板2dは、回転子6に結合された円盤であり、例えば、複数つのトラックによりグレイコード(例、Xビットのグレイコード)が形成されたパターン20dを備えている。この複数のトラックのそれぞれは、第1の実施形態におけるパターン20と同様に、1トラックに透過部20Tと反射部20Rとを有する透過反射パターンである。ここで、例えば、符号板2dは、複数(例、X個)の透過反射パターン20d−1〜20d−Xを有している。
In the present embodiment, an example in which the
As shown in FIG. 10, the
また、基板7dは、少なくとも光源部3及び受光素子421(421−1〜421−X)を備え、基板5cは、少なくとも受光素子411(421−1〜421−X)を備えている。なお、図10(b)及び図10(c)においては、説明上、受光素子411−1〜411−3と、受光素子421−1〜421−3とを図示し、その他の受光素子を省略して説明する。また、受光素子411−1〜411−Xは、第1の実施形態における受光素子411と同一の構成であり、受光素子411−1〜411−Xのうちの任意の受光素子を示す場合には、受光素子411と称して以下説明する。また、受光素子421−1〜421−Xは、第1の実施形態における受光素子421と同一の構成であり、受光素子421−1〜421−Xのうちの任意の受光素子を示す場合には、受光素子421と称して以下説明する。
The
図10(b)に示すように、受光素子411−1〜411−3は、光源部3によって射出された照射光がパターン20d(透過反射パターン20d−1〜20d−3)の透過部20Tを透過した照射光を受光する位置に配置されている。なお、図10(b)に示す一例では、透過反射パターン20d−1〜20d−3の全てが透過部20Tである場合を示している。この場合、第1の実施形態と同様に、上述した第1の光量が増大し、第2の光量が低減する。
As shown in FIG. 10 (b), the light receiving elements 411-1 to 411-3 pass through the
図10(c)に示すように、受光素子421−1〜421−3は、光源部3によって射出された照射光がパターン20d(透過反射パターン20d−1〜20d−3)の反射部20Rを反射した照射光を受光する位置に配置されている。なお、図10(c)に示す一例では、透過反射パターン20d−1〜20d−3の全てが反射部20Rである場合を示している。この場合、第1の実施形態と同様に、上述した第2の光量が増大し、第1の光量が低減する。
As shown in FIG. 10 (c), the light receiving elements 421-1 to 421-3 pass through the reflecting
図11は、本実施形態におけるエンコーダ1dの一例を示すブロック図である。
図11において、エンコーダ1dは、光源部3、位置検出部40a、受光センサ部41−1〜41−X、受光センサ部42−1〜42−X、及び二値化部60−Xを備えている。
FIG. 11 is a block diagram illustrating an example of the
11, the
受光センサ部41−1〜41−X(第1のセンサ部)はそれぞれ、第1の実施形態における受光センサ部41と同様の構成であり、パターン20dを検出し、パターン20dを介して照射光に生じた第1の光量に応じて、検出信号ABS1〜ABSX(第1の検出信号)を出力する。なお、本実施形態における受光センサ部41−1〜41−Xは、第1の実施形態における受光センサ部41のように複数の受光素子411を備える代わりに、それぞれが1つの受光素子411(411−1〜411−X)を備えている。ここで、例えば、受光センサ部41−1は、透過反射パターン20d−1に基づく第1の光量に応じて、検出信号ABS1を検出し、受光センサ部41−Xは、透過反射パターン20d−Xに基づく第1の光量に応じて、検出信号ABSXを検出する。
Each of the light receiving sensor units 41-1 to 41-X (first sensor unit) has the same configuration as the light receiving
なお、図11において、受光素子411−1〜411−X、電源供給部412−1〜412−X、抵抗413−1〜413−X、及びアンプ部414−1〜414−Xは、それぞれ、第1の実施形態における受光素子411、電源供給部412、抵抗413、及びアンプ部414と同一の構成であり、ここでは説明を省略する。
In FIG. 11, the light receiving elements 411-1 to 411-X, the power supply units 412-1 to 412-X, the resistors 413-1 to 413-X, and the amplifier units 414-1 to 414-X are respectively The configuration is the same as that of the
受光センサ部42−1〜42−X(第2のセンサ部)はそれぞれ、第1の実施形態における受光センサ部42と同様の構成であり、パターン20dを検出し、パターン20dを介して照射光に生じた第2の光量に応じて、検出信号/ABS1〜/ABSX(第2の検出信号)を出力する。なお、本実施形態における受光センサ部42−1〜42−Xは、第1の実施形態における受光センサ部42のように複数の受光素子421を備える代わりに、それぞれが1つの受光素子421(421−1〜421−X)を備えている。ここで、例えば、受光センサ部42−1は、透過反射パターン20d−1に基づく第2の光量に応じて、検出信号/ABS1を検出し、受光センサ部42−Xは、透過反射パターン20d−Xに基づく第2の光量に応じて、検出信号/ABSXを検出する。
Each of the light receiving sensor units 42-1 to 42-X (second sensor unit) has the same configuration as the light receiving
なお、図11において、受光素子421−1〜421−X、電源供給部422−1〜422−X、抵抗423−1〜423−X、及びアンプ部424−1〜424−Xは、それぞれ、第1の実施形態における受光素子421、電源供給部422、抵抗423、及びアンプ部424と同一の構成であり、ここでは説明を省略する。
In FIG. 11, the light receiving elements 421-1 to 421-X, the power supply units 422-1 to 422-X, the resistors 423-1 to 423-X, and the amplifier units 424-1 to 424-X are respectively The configuration is the same as that of the
二値化部60−1〜60−Xは、受光センサ部41−1〜41−Xが出力する検出信号ABS1〜ABSX、及び受光センサ部42−1〜42−Xが出力する検出信号/ABS1〜/ABSXを差動信号として、パターン20dに対応した二値化信号DABS1〜DABSXを生成する。例えば、二値化部60−1は、受光センサ部41−1が出力する検出信号ABS1、及び受光センサ部42−1が出力する検出信号/ABS1を差動信号として、透過反射パターン20d−1に対応した二値化信号DABS1を生成する。また、例えば、二値化部60−Xは、受光センサ部41−Xが出力する検出信号ABSX、及び受光センサ部42−Xが出力する検出信号/ABSXを差動信号として、透過反射パターン20d−Xに対応した二値化信号DABSXを生成する。二値化部60−1〜60−Xは、生成した二値化信号DABS1〜DABS−Xを位置検出部40aに出力する。
また、二値化部60−1〜60−Xのそれぞれは、例えば、第1の実施形態におけるコンパレータ61と同様のコンパレータ回路(コンパレータ61−1〜60−X)を備えている。ここで、コンパレータ61−1〜60−Xは、第1の実施形態におけるコンパレータ61と同様の構成でありここでは説明を省略する。
The binarization units 60-1 to 60-X include detection signals ABS1 to ABSX output from the light receiving sensor units 41-1 to 41-X and detection signals / ABS1 output from the light receiving sensor units 42-1 to 42-X. The binarized signals DABS1 to DABSX corresponding to the
Each of the binarization units 60-1 to 60-X includes, for example, a comparator circuit (comparators 61-1 to 60-X) similar to the
位置検出部40aは、二値化部60−1〜60−Xによって生成された二値化信号DABS1〜DABSXに基づいて、回転子6の位置情報(例、角度情報)を検出する。位置検出部40aは、二値化信号DABS1〜DABSXによりパターン20dにおけるグレイコードパターンに対応するコードを生成し、生成したコードに対応する絶対位置情報(例、角度情報)を生成する。位置検出部40aは、生成した絶対位置情報を例えば、外部コントローラなどの上位装置に出力する。
The
次に、本実施形態におけるエンコーダ1dの動作について図面を参照して説明する。
図12は、本実施形態におけるエンコーダ1dの動作を示す図である。
図12において、各グラフは、回転方向(検出方向)の位置に対応する、差動信号(検出信号ABS1,検出信号/ABS1)、二値化信号DABS1、差動信号(検出信号ABSX,検出信号/ABSX)、及び二値化信号DABSXを示している。ここで、波形W13は、受光センサ部41−1が出力する差動信号(検出信号ABS1)の信号波形を示し、波形W14は、受光センサ部42−1が出力する差動信号(検出信号/ABS1)の信号波形を示している。また、波形W15は、二値化部60−1が出力する二値化信号DABS1を示している。
Next, the operation of the
FIG. 12 is a diagram illustrating the operation of the
In FIG. 12, each graph shows a differential signal (detection signal ABS1, detection signal / ABS1), a binary signal DABS1, a differential signal (detection signal ABSX, detection signal) corresponding to the position in the rotation direction (detection direction). / ABSX) and the binarized signal DABSX. Here, the waveform W13 indicates the signal waveform of the differential signal (detection signal ABS1) output from the light receiving sensor unit 41-1, and the waveform W14 indicates the differential signal (detection signal / The signal waveform of ABS1) is shown. A waveform W15 indicates the binarized signal DABS1 output from the binarizing unit 60-1.
また、波形W16は、受光センサ部41−Xが出力する差動信号(検出信号ABSX)の信号波形を示し、波形W17は、受光センサ部42―Xが出力する差動信号(検出信号/ABSX)の信号波形を示している。また、波形W18は、二値化部60−Xが出力する二値化信号DABSXを示している。
また、図12において、透過反射パターン20d−1及び透過反射パターン20d−Xは、透過部20Tと反射部20Rとの組み合わせにより形成されている。
A waveform W16 indicates a signal waveform of a differential signal (detection signal ABSX) output from the light receiving sensor unit 41-X, and a waveform W17 indicates a differential signal (detection signal / ABSX) output from the light receiving sensor unit 42-X. ) Shows the signal waveform. A waveform W18 represents the binarized signal DABSX output from the binarization unit 60-X.
In FIG. 12, the transmission /
本実施形態において、受光センサ部41−1〜41−X、受光センサ部42−1〜42−X、及び二値化部60−1〜60−Xの動作は、第1の実施形態における受光センサ部41、受光センサ部42、及び二値化部60の動作と同様である。
例えば、受光センサ部41−1は、透過反射パターン20d−1を検出し、波形W13に示すような検出信号ABS1を二値化部60−1に出力する。なお、ここで、電位Vrefは、検出信号ABS1の変化の中間電位を示す。
例えば、受光センサ部42−1は、透過反射パターン20d−1を検出し、波形W14に示すような検出信号/ABS1を二値化部60−1に出力する。
そして、例えば、二値化部60−1のコンパレータ61−1は、受光センサ部41−1が出力する検出信号ABS1、及び受光センサ部42−1が出力する検出信号/ABS1を差動信号として、波形W15に示すような透過反射パターン20d−1に対応した二値化信号DABS1を生成する。
In the present embodiment, the operations of the light receiving sensor units 41-1 to 41-X, the light receiving sensor units 42-1 to 42-X, and the binarizing units 60-1 to 60-X are the same as those in the first embodiment. The operation is the same as that of the
For example, the light receiving sensor unit 41-1 detects the transmission /
For example, the light receiving sensor unit 42-1 detects the transmission /
For example, the comparator 61-1 of the binarization unit 60-1 uses the detection signal ABS1 output from the light receiving sensor unit 41-1 and the detection signal / ABS1 output from the light receiving sensor unit 42-1 as differential signals. A binary signal DABS1 corresponding to the transmission /
また、例えば、受光センサ部41−Xは、透過反射パターン20d−Xを検出し、波形W16に示すような検出信号ABS1を二値化部60−1に出力する。なお、ここで、電位Vrefは、検出信号ABSXの変化の中間電位を示す。
例えば、受光センサ部42−Xは、透過反射パターン20d−Xを検出し、波形W17に示すような検出信号/ABSXを二値化部60−Xに出力する。
そして、例えば、二値化部60−Xのコンパレータ61−Xは、受光センサ部41−Xが出力する検出信号ABSX、及び受光センサ部42−Xが出力する検出信号/ABSXを差動信号として、波形W18に示すような透過反射パターン20d−Xに対応した二値化信号DABSXを生成する。
Further, for example, the light receiving sensor unit 41-X detects the transmission /
For example, the light receiving sensor unit 42-X detects the transmission /
For example, the comparator 61-X of the binarization unit 60-X uses the detection signal ABSX output from the light receiving sensor unit 41-X and the detection signal / ASX output from the light receiving sensor unit 42-X as differential signals. Then, a binary signal DABSX corresponding to the transmission /
ここで、従来のエンコーダでは、二値化信号を生成する際のマージン(例えば、ノイズマージン)は、電圧範囲MG1となる。これに対して、本実施形態におけるエンコーダ1dでは、二値化信号DABS1を生成する際のマージン(例えば、ノイズマージン)は、電圧範囲MG1より広い範囲である電圧範囲MG2となる。同様に、本実施形態におけるエンコーダ1dでは、二値化信号DABSXを生成する際のマージン(例えば、ノイズマージン)は、電圧範囲MG2となる。このように、本実施形態におけるエンコーダ1dは、二値化信号DABS1〜DABSXを生成する際のマージン(例えば、ノイズマージン)を従来の固定の閾値電圧を用いる場合に比べて広くすることができる。
Here, in the conventional encoder, the margin (for example, noise margin) when generating the binarized signal is the voltage range MG1. On the other hand, in the
次に、位置検出部40aは、二値化部60―1〜60−Xによって生成された二値化信号DABS1〜DABSXに基づいて、回転子6の位置情報(例、角度情報)を検出する。
Next, the
以上説明したように、本実施形態におけるエンコーダ1dは、第1の実施形態と同様の受光センサ部41−1〜41−X、受光センサ部42−1〜42−X、及び二値化部60−1〜60−Xを備えている。本実施形態におけるエンコーダ1dは、グレイコードによるマルチトラックパターン(透過反射パターン20d−1〜20d−X)に基づいて、第1の実施形態と同様の差動信号を生成するようにしたので、第1の実施形態と同様の効果を得ることができる。したがって、本実施形態におけるエンコーダ1dは、第1の実施形態と同様に、信頼性を向上せることができる。
As described above, the
[第6の実施形態]
次に、上述の実施形態におけるエンコーダ1(1a〜1d)を備える駆動装置(モータ装置、アクチュエータ)について説明する。
図13は、本実施形態における駆動装置DRの概略図である。本実施形態における駆動装置DRは、入力軸IAXを回転させるモータMTRと、入力軸IAX(回転子)に設けられたエンコーダ1(1a〜1d)と、を備える。すなわち、駆動装置DRは、エンコーダ1(1a〜1d)と、入力軸IAX(被駆動体)を駆動する(移動させる)モータMTR(駆動部)と、を備えている。
[Sixth Embodiment]
Next, a driving device (motor device, actuator) including the encoder 1 (1a to 1d) in the above-described embodiment will be described.
FIG. 13 is a schematic diagram of the drive device DR in the present embodiment. The drive device DR in the present embodiment includes a motor MTR that rotates the input shaft IAX, and an encoder 1 (1a to 1d) provided on the input shaft IAX (rotor). That is, the driving device DR includes an encoder 1 (1a to 1d) and a motor MTR (driving unit) that drives (moves) the input shaft IAX (driven body).
エンコーダ1(1a〜1d)は、入力軸IAX(被駆動体)の回転位置(角度位置)を検出し、駆動装置DRを制御する上位のコントローラに対して回転位置を含む位置情報をエンコーダ信号として出力する。上位のコントローラは、エンコーダ1(1a〜1d)から受信したエンコーダ信号をもとに、駆動装置DRを制御する。本実施形態におけるエンコーダ1(1a〜1d)は入力軸IAXの回転位置の誤検出を低減することができるため、本実施形態における駆動装置DRはモータMTRの入力軸IAXを高精度に位置制御することができる。また、本実施形態における駆動装置DRは、位置制御における信頼性を向上させることができる。 The encoder 1 (1a to 1d) detects the rotational position (angular position) of the input shaft IAX (driven body), and uses the positional information including the rotational position as an encoder signal for a host controller that controls the driving device DR. Output. The host controller controls the driving device DR based on the encoder signal received from the encoder 1 (1a to 1d). Since the encoder 1 (1a to 1d) in the present embodiment can reduce erroneous detection of the rotational position of the input shaft IAX, the driving device DR in the present embodiment controls the position of the input shaft IAX of the motor MTR with high accuracy. be able to. Further, the driving device DR in the present embodiment can improve the reliability in position control.
[第7の実施形態]
次に、上述の実施形態における駆動装置DRを備えるロボット装置を説明する。
図14は、一例として第6の実施形態に記載の駆動装置DR(モータ装置)を備えるロボット装置RBTの一部(ハンドロボットの指部分の先端)の構成を示す図である。なお、上記実施形態に記載の駆動装置DRは、ロボット装置RBTのアーム部を駆動する駆動部として用いてもよい。
[Seventh Embodiment]
Next, a robot apparatus including the driving device DR in the above-described embodiment will be described.
FIG. 14 is a diagram illustrating a configuration of a part (tip of a finger part of a hand robot) of a robot apparatus RBT including the driving apparatus DR (motor apparatus) described in the sixth embodiment as an example. The drive device DR described in the above embodiment may be used as a drive unit that drives the arm unit of the robot device RBT.
図14に示すように、ロボット装置RBTは、末節部101、中節部102及び関節部103を有しており、末節部101と中節部102とが関節部103を介して接続された構成になっている。関節部103には軸支持部103a及び軸部103bが設けられている。軸支持部103aは中節部102に固定されている。軸部103bは、軸支持部103aによって固定された状態で支持されている。
As shown in FIG. 14, the robot apparatus RBT includes a
末節部101は、接続部101a及び歯車101bを有している。接続部101aには、関節部103の軸部103bが貫通した状態になっており、当該軸部103bを回転軸として末節部101が回転可能になっている。この歯車101bは、接続部101aに固定されたベベルギアである。接続部101aは、歯車101bと一体的に回転するようになっている。
The
中節部102は、筐体102a及び駆動装置DRを有している。駆動装置DRは、上記実施形態に記載の駆動装置DRを用いることができる。駆動装置DRは、筐体102a内に設けられている。駆動装置DRには、回転軸部材104aが取り付けられている。回転軸部材104aの先端には、歯車104bが設けられている。この歯車104bは、回転軸部材104aに固定されたベベルギアである。歯車104bは、上記の歯車101bとの間で噛み合った状態になっている。なお、回転軸部材104aに直接ギアが形成された構成であっても構わない。
The middle
上記のように構成されたロボット装置RBTは、駆動装置DRの駆動によって回転軸部材104aが回転し、当該回転軸部材104aと一体的に歯車104bが回転する。歯車104bの回転は、当該歯車104bと噛み合った歯車101bに伝達され、歯車101bが回転する。当該歯車101bが回転することで接続部101aも回転し、これにより末節部101が軸部103bを中心に回転する。
In the robot apparatus RBT configured as described above, the
このように、本実施形態によれば、位置制御における信頼性を向上させることができる駆動装置DRを搭載することにより、位置制御における信頼性の高いロボット装置RBTを提供することができる。 Thus, according to the present embodiment, it is possible to provide a robot apparatus RBT with high reliability in position control by mounting the drive apparatus DR that can improve the reliability in position control.
なお、本発明は、上記の各実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で変更可能である。
例えば、上記の第1、第2、第4、及び第5の実施形態において、基板7(7a,7c,7d)は、光源部3と受光素子421(411)と実装する形態を説明したが、光源部3と受光素子421(411)とを異なる基板に実装する形態でもよい。
The present invention is not limited to the above embodiments, and can be modified without departing from the spirit of the present invention.
For example, in the first, second, fourth, and fifth embodiments, the substrate 7 (7a, 7c, 7d) has been described as being mounted with the
例えば、図15は、第1の実施形態において、基板7eに受光素子421を実装し、光源部3を基板7eに実装しない場合の変形例を示す図である。このように、第1の実施形態におけるエンコーダ1は、光源部3と受光素子421とを異なる基板に実装する形態でもよい。
また、例えば、図16は、第5の実施形態において、基板7fに受光素子421−1〜421−3を実装し、光源部3を基板7fに実装しない場合の変形例を示す図である。このように、第5の実施形態におけるエンコーダ1dは、光源部3と受光素子421−1〜421−3とを異なる基板に実装する形態でもよい。
この場合、例えば、基板7e(7f)が半導体基板(半導体チップ)であり、光源部3のチップをチップオンチップ接合することが可能な実装装置がない場合であっても、簡易な実装手段によりエンコーダ1(1d)を製造することができる。
For example, FIG. 15 is a diagram illustrating a modification in the case where the
For example, FIG. 16 is a diagram illustrating a modification in the case where the light receiving elements 421-1 to 421-3 are mounted on the
In this case, for example, even when the
また、上記の第5の実施形態において、第1の実施形態にグレイコードを用いたマルチトラックを適用する形態を説明したが、第2〜第4の実施形態にグレイコードを用いたマルチトラックを適用してもよい。 In the fifth embodiment, the multitrack using the gray code is applied to the first embodiment. However, the multitrack using the gray code is used in the second to fourth embodiments. You may apply.
また、上記の各実施形態において、光源部3は、パターン20(20a〜20d)に対して短手方向(例、径方向(X軸方向))にずらした位置に配置する形態を説明したが、これに限定されるものではない。例えば、光源部3は、パターン20(20a〜20d)に対して検出方向(円周方向)にずらして配置してもよいし、他の方向(例、検出方向に対して斜め方向)にずらして配置してもよい。なお、光源部3をパターン20(20a〜20d)に対してずらす長さは、光源部3から符号板2(2a〜2d)までの距離と検出素子(411,421)の受光面積と光源部3の照射エリアとに基づいて決定されてもよい。
In each of the above embodiments, the
また、上記の各実施形態において、光源部3は、レンズを介さずに符号板2(2a〜2d)に照射光を射出する形態を説明したが、レンズを介して符号板2(2a〜2d)に照射光を射出する形態でもよい。
また、上記の各実施形態において、エンコーダ1(1a〜1d)は、ロータリエンコーダである場合について説明したが、上記の各実施形態は、符号板がセンサ部に対して相対的に移動するリニアエンコーダに対して適用してもよい。
Further, in each of the above embodiments, the
In each of the above embodiments, the encoder 1 (1a to 1d) is a rotary encoder. However, each of the above embodiments is a linear encoder in which the code plate moves relative to the sensor unit. You may apply to.
1,1a,1b,1c,1d…エンコーダ、2,2a,2b,2c,2d,2f…符号板、6…回転子、7,7a,7b,7c,7d…基板、20,20a,20b,20c,20d…パターン、20d−1,20d−2,20d−3…透過反射パターン、21,22,22b…反射パターン、21a,21b,22a…透過パターン、20T,21T,22T…透過部、20R,21R,22R…反射部、21NT,22NT…非透過部、21NR,22NR…非反射部、40,40a…位置検出部、41,42,41−1,42−1,41−X,42−X…受光センサ部、60,60−1,60−X…二値化部、DR…駆動装置、MTR…モータ、RBT…ロボット装置 1, 1a, 1b, 1c, 1d ... encoder, 2, 2a, 2b, 2c, 2d, 2f ... code plate, 6 ... rotor, 7, 7a, 7b, 7c, 7d ... substrate, 20, 20a, 20b, 20c, 20d ... pattern, 20d-1, 20d-2, 20d-3 ... transmission reflection pattern, 21, 22, 22b ... reflection pattern, 21a, 21b, 22a ... transmission pattern, 20T, 21T, 22T ... transmission part, 20R , 21R, 22R ... reflective portion, 21NT, 22NT ... non-transmissive portion, 21NR, 22NR ... non-reflective portion, 40, 40a ... position detecting portion, 41, 42, 41-1, 42-1, 41-X, 42- X ... light receiving sensor unit, 60, 60-1, 60-X ... binarization unit, DR ... drive device, MTR ... motor, RBT ... robot device
Claims (15)
被駆動体の位置情報を示し、第1の光量と前記第1の光量を反転させた逆位相となる第2の光量とを前記照射光に生じさせるパターンを有する符号板と、
前記パターンを介して前記照射光に生じた前記第1の光量に応じて、第1の検出信号を出力する第1の受光センサ部と、
前記パターンを介して前記照射光に生じた前記第2の光量に応じて、第2の検出信号を出力する第2の受光センサ部と、
前記第1の検出信号及び前記第2の検出信号を差動信号として、前記位置情報に対応した二値化信号を生成する二値化部と、
前記二値化信号に基づいて、前記位置情報を検出する位置検出部と
を備えるエンコーダ。 A light source unit for emitting irradiation light;
A sign plate having a pattern that indicates positional information of the driven body and that causes the irradiation light to generate a first light quantity and a second light quantity having an opposite phase obtained by inverting the first light quantity;
A first light receiving sensor unit that outputs a first detection signal according to the first light amount generated in the irradiation light through the pattern;
A second light receiving sensor unit that outputs a second detection signal according to the second light amount generated in the irradiation light through the pattern;
A binarization unit that generates a binarized signal corresponding to the position information using the first detection signal and the second detection signal as differential signals;
On the basis of the binary signal, Ru and a position detector for detecting the position information encoder.
前記照射光を透過する透過部と、前記照射光を反射する反射部とを含んで形成され、
前記第1の受光センサ部は、前記パターンを透過した光に生じる前記第1の光量に応じて、前記第1の検出信号を出力し、
前記第2の受光センサ部は、前記パターンを反射した光に生じる前記第2の光量に応じて、前記第2の検出信号を出力する
請求項1に記載のエンコーダ。 The pattern is
It is formed including a transmission part that transmits the irradiation light and a reflection part that reflects the irradiation light,
The first light receiving sensor unit outputs the first detection signal according to the first light amount generated in the light transmitted through the pattern,
The second light receiving sensor unit outputs the second detection signal according to the second light amount generated in the light reflected from the pattern.
Encoder according to 請 Motomeko 1.
前記透過部と前記反射部との組み合わせにより前記位置情報を示すように形成されている
請求項2に記載のエンコーダ。 The pattern is
The position information is formed by a combination of the transmission part and the reflection part.
Encoder according to 請 Motomeko 2.
前記透過部と、前記透過部より透過率の低い非透過部との組み合わせにより形成されている第1パターンと、
前記反射部と、前記反射部より反射率の低い非反射部との組み合わせにより形成されている第2パターンと
を有する、
請求項2に記載のエンコーダ。 The pattern is
A first pattern formed by a combination of the transmissive portion and a non-transmissive portion having a lower transmittance than the transmissive portion;
A second pattern formed by a combination of the reflective part and a non-reflective part having a lower reflectance than the reflective part,
Encoder according to 請 Motomeko 2.
前記第1の光量を生じさせる第1パターンと、
前記第1パターンの反転パターンにより形成され、前記第2の光量を生じさせる第2パターンと
を有し、
前記第1の受光センサ部は、前記第1パターンに基づく前記第1の光量に応じて、前記第1の検出信号を出力し、
前記第2の受光センサ部は、前記第2パターンに基づく前記第2の光量に応じて、前記第2の検出信号を出力する
請求項1に記載のエンコーダ。 The pattern is
A first pattern for generating the first light amount;
A second pattern formed by an inverted pattern of the first pattern and generating the second light amount,
The first light receiving sensor unit outputs the first detection signal according to the first light amount based on the first pattern,
The second light receiving sensor unit outputs the second detection signal according to the second light amount based on the second pattern.
Encoder according to 請 Motomeko 1.
前記第1の受光センサ部及び前記第2の受光センサ部のそれぞれは、
前記光源部から射出された前記照射光が、前記パターンを介して入射される位置に配置
されている
請求項1から請求項5のいずれか一項に記載のエンコーダ。 The light source unit is arranged at a position away from the pattern in a short direction of the pattern different from a longitudinal direction of the pattern which is a detection direction of the position information.
Each of the first light receiving sensor unit and the second light receiving sensor unit is
The irradiation light emitted from the light source unit is disposed at a position where it enters through the pattern.
The encoder according to any one of claims 5 請 Motomeko 1.
請求項1から請求項6のいずれか一項に記載のエンコーダ。 The light source unit and the second light receiving sensor unit are mounted on the same substrate.
The encoder according to any one of claims 6 請 Motomeko 1.
請求項1から請求項7のいずれか一項に記載のエンコーダ。 The first light receiving sensor unit is arranged with the pattern interposed therebetween so as to face the light source unit.
The encoder according to any one of claims 7 請 Motomeko 1.
を備える符号板。 Indicates the position information of the driven member, sign-board having a pattern that causes the irradiation light emitted and a second amount as the first light amount and the first amount antiphase obtained by inverting the light source unit .
前記照射光を透過する透過部と、前記照射光を反射する反射部とを含んで形成され、前記パターンを透過した光に前記第1の光量を生じさせるとともに、前記パターンを反射した光に前記第2の光量を生じさせる
請求項9に記載の符号板。 The pattern is
The transmission part that transmits the irradiation light and the reflection part that reflects the irradiation light are formed, the first light amount is generated in the light transmitted through the pattern, and the light reflected from the pattern is reflected in the light. Produce a second light quantity
Sign plate according to 請 Motomeko 9.
前記透過部と前記反射部との組み合わせにより前記位置情報を示すように形成されている
請求項10に記載の符号板。 The pattern is
The position information is formed by a combination of the transmission part and the reflection part.
Sign plate according to 請 Motomeko 1 0.
前記透過部と、前記透過部より透過率の低い非透過部との組み合わせにより形成され、前記第1の光量を生じさせる第1パターンと、
前記反射部と、前記反射部より反射率の低い非反射部との組み合わせにより形成され、前記第2の光量を生じさせる第2パターンと
を備える請求項10に記載の符号板。 The pattern is
A first pattern that is formed by a combination of the transmissive portion and a non-transmissive portion having a lower transmittance than the transmissive portion, and generates the first light amount;
Wherein a reflection portion, the formed by the combination of the non-reflective portion of low reflectivity than the reflection part, code plate according to 請 Motomeko 1 0 and a second pattern to produce a second light quantity.
前記第1の光量を生じさせる第1パターンと、
前記第1パターンの反転パターンにより形成され、前記第2の光量を生じさせる第2パターンと
を備える請求項9に記載の符号板。 The pattern is
A first pattern for generating the first light amount;
Inverted is formed by the pattern, the sign plate according to 請 Motomeko 9 and a second pattern to produce a second quantity of the first pattern.
前記被駆動体を移動させる駆動部と、
前記被駆動体に固定され、前記被駆動体の位置情報を検出する請求項1から請求項8のいずれか一項に記載のエンコーダと
を備える駆動装置。 A driven body;
A drive unit for moving the driven body;
Secured to said driven member, drive operated device comprising an encoder according the any one of claims 1 to claim 8 for detecting the position information of the driven body.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012149325A JP5998682B2 (en) | 2012-07-03 | 2012-07-03 | Encoder, code plate, drive device, and robot device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012149325A JP5998682B2 (en) | 2012-07-03 | 2012-07-03 | Encoder, code plate, drive device, and robot device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014010137A JP2014010137A (en) | 2014-01-20 |
| JP2014010137A5 JP2014010137A5 (en) | 2015-07-16 |
| JP5998682B2 true JP5998682B2 (en) | 2016-09-28 |
Family
ID=50106945
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012149325A Active JP5998682B2 (en) | 2012-07-03 | 2012-07-03 | Encoder, code plate, drive device, and robot device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5998682B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6401542B2 (en) * | 2014-08-07 | 2018-10-10 | 株式会社トプコン | Absolute encoder, surveying instrument |
| JP6083034B2 (en) * | 2014-09-03 | 2017-02-22 | 有限会社ファインチューン | Absolute type encoder |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2785202B2 (en) * | 1989-04-19 | 1998-08-13 | ソニー株式会社 | Optical disk drive |
| JPH05203465A (en) * | 1992-01-27 | 1993-08-10 | Omron Corp | Rotary encoder |
| JP3384097B2 (en) * | 1994-03-31 | 2003-03-10 | ソニー・プレシジョン・テクノロジー株式会社 | Fixed point detector |
| JPH11287671A (en) * | 1998-04-01 | 1999-10-19 | Fanuc Ltd | Optical encoder |
| JP5614030B2 (en) * | 2009-11-25 | 2014-10-29 | セイコーエプソン株式会社 | Encoder and electromechanical device |
| US9383229B2 (en) * | 2010-10-31 | 2016-07-05 | Avego Technologies General Ip (Singapore) Pte. Ltd. | Optical reflective encoder with multi-faceted flat-faced lens |
-
2012
- 2012-07-03 JP JP2012149325A patent/JP5998682B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014010137A (en) | 2014-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5527637B2 (en) | Encoder, optical module and servo system | |
| JP2014013163A (en) | Encoder, and motor | |
| JP2012168177A (en) | Three-channel encoder using single optical track | |
| RU2471289C1 (en) | Optical encoder | |
| JPH08261796A (en) | Increment light beam encoder device | |
| JP6842680B2 (en) | Encoder, servo motor, servo system | |
| JP2016118486A (en) | Encoder and motor with encoder | |
| JP2015090303A (en) | Encoder, motor with encoder, and servo system | |
| JP3366347B2 (en) | Optical encoder with improved index pulse | |
| EP3032225A2 (en) | Encoder and motor with encoder | |
| JP5998682B2 (en) | Encoder, code plate, drive device, and robot device | |
| JP5999584B2 (en) | Encoder, motor with encoder, servo system | |
| JP5943238B2 (en) | Encoder, motor with encoder, servo system | |
| US20110139971A1 (en) | Rotary position encoder | |
| JP5927779B2 (en) | Encoder, drive system, and control device | |
| JP6098999B2 (en) | Encoder and motor with encoder | |
| US8085650B2 (en) | Optical encoder having optical encoding disc with light converging portions and light diverging portions | |
| JPH08111060A (en) | Optical rotary encoder | |
| JPWO2016092638A1 (en) | Encoder and motor with encoder | |
| JP2011145118A (en) | Reflected type optical encoder | |
| JP2016109633A (en) | Encoder and motor with encoder | |
| CN104613996A (en) | Encoder, motor with encoder, and servo system | |
| JP6004193B2 (en) | Encoder, motor with encoder, servo system | |
| JP2009210374A (en) | Encoder and light receiving unit | |
| JP4535794B2 (en) | Reflective optical encoder sensor head |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150528 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160802 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160815 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5998682 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |