JP5970909B2 - Clamp mechanism and substrate bonding apparatus - Google Patents
Clamp mechanism and substrate bonding apparatus Download PDFInfo
- Publication number
- JP5970909B2 JP5970909B2 JP2012074651A JP2012074651A JP5970909B2 JP 5970909 B2 JP5970909 B2 JP 5970909B2 JP 2012074651 A JP2012074651 A JP 2012074651A JP 2012074651 A JP2012074651 A JP 2012074651A JP 5970909 B2 JP5970909 B2 JP 5970909B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate holder
- substrate
- coupling
- coupled
- stress
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



































Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
本発明は、クランプ機構、及び、基板貼り合わせ装置に関する。 The present invention relates to a clamp mechanism and a substrate bonding apparatus.
一対の基板ホルダを有する基板ホルダ対に積層された状態で保持された複数の基板を接合する基板貼り合わせ方法が知られている(例えば、特許文献1参照)。基板ホルダ対の一対の基板ホルダは、磁力等によって互いに結合する結合部材を有する。少なくとも一方の結合部材は、弾性部材によって基板ホルダに設けられている。結合部材が結合することにより、一対の基板ホルダの間で複数の基板が挟持される。
[特許文献1] 特開2010−10628号公報
A substrate bonding method for bonding a plurality of substrates held in a state of being stacked on a pair of substrate holders having a pair of substrate holders is known (for example, see Patent Document 1). The pair of substrate holders of the pair of substrate holders has a coupling member that couples to each other by magnetic force or the like. At least one of the coupling members is provided on the substrate holder by an elastic member. When the coupling member is coupled, the plurality of substrates are sandwiched between the pair of substrate holders.
[Patent Document 1] Japanese Patent Application Laid-Open No. 2010-10628
しかしながら、一対の基板ホルダが互いに結合すると、弾性部材が変形して、挟持された複数の基板の相対位置がずれるといった課題がある。 However, when the pair of substrate holders are coupled to each other, there is a problem that the elastic member is deformed and the relative positions of the plurality of sandwiched substrates are shifted.
本発明の第1の態様においては、第1ホルダ本体と、前記第1ホルダ本体に設けられた第1結合部材とを有する第1基板ホルダと、前記第1ホルダ本体との間で複数の基板を挟持する第2ホルダ本体と、前記第2ホルダ本体に設けられ前記第1結合部材と結合する第2結合部材と、前記第2ホルダ本体と前記第2結合部材とを連結するとともに弾性変形可能な弾性部材とを有する第2基板ホルダと、前記第1結合部材と、前記第2結合部材とが結合することにより前記弾性部材に発生する前記基板の面方向の応力を低減する応力低減部とを備えるクランプ機構を提供する。 In the first aspect of the present invention, a plurality of substrates are provided between the first holder body having a first holder body and a first coupling member provided on the first holder body, and the first holder body. A second holder main body that sandwiches the first coupling member, a second coupling member that is provided in the second holder main body and that couples to the first coupling member, and connects the second holder main body and the second coupling member and is elastically deformable. A second substrate holder having a flexible elastic member, the first coupling member, and a stress reducing unit that reduces the stress in the surface direction of the substrate generated in the elastic member by coupling the second coupling member; A clamp mechanism is provided.
本発明の第2の態様においては、上述のクランプ機構を備える基板貼り合わせ装置を提供する。 In the 2nd aspect of this invention, a board | substrate bonding apparatus provided with the above-mentioned clamp mechanism is provided.
なお、上記の発明の概要は、本発明の必要な特徴の全てを列挙したものではない。また、これらの特徴群のサブコンビネーションもまた、発明となりうる。 It should be noted that the above summary of the invention does not enumerate all the necessary features of the present invention. In addition, a sub-combination of these feature groups can also be an invention.
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。 Hereinafter, the present invention will be described through embodiments of the invention, but the following embodiments do not limit the invention according to the claims. In addition, not all the combinations of features described in the embodiments are essential for the solving means of the invention.
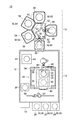
図1は、基板貼り合わせ装置10の全体構成図である。基板貼り合わせ装置10は、2枚の基板90、90を貼り合わせて、貼り合わせ基板95を製造する。尚、基板貼り合わせ装置10が、一度に3枚以上の基板90を貼り合わせて、貼り合わせ基板95を製造してもよい。
FIG. 1 is an overall configuration diagram of the
図1に示すように、基板貼り合わせ装置10は、大気環境部14と、真空環境部16と、制御部18とを備える。
As shown in FIG. 1, the
大気環境部14は、環境チャンバ12と、複数の基板カセット20と、基板ホルダラック22と、ロボットアーム24と、プリアライナ26と、アライナ28と、ロボットアーム30とを有する。環境チャンバ12は、大気環境部14を囲むように形成されている。
The
基板カセット20は、基板貼り合わせ装置10において貼り合わされる基板90及び貼り合わされた貼り合わせ基板95を収容する。基板貼り合わせ装置10によって貼り合わされる基板90は、単体のシリコンウエハ、化合物半導体ウエハ、ガラス基板等の他、それらに素子、回路、端子等が形成されていてもよい。
The
基板ホルダラック22は、一対の基板90が重ね合わされた重ね合わせ基板92及び貼り合わせ基板95を上下方向から保持する複数対の基板ホルダ94を収容する。基板ホルダ94は、基板90を静電吸着により保持する。
The
ロボットアーム24は、基板カセット20に装填されている基板90をプリアライナ26に搬送する。ロボットアーム24は、プリアライナ26の基板90を、後述するアライナ28の移動ステージ38に載置された基板ホルダ94へと搬送する。ロボットアーム24は、貼り合わされた後、移動ステージ38まで搬送された貼り合わせ基板95を基板カセット20の何れかに搬送する。
The
プリアライナ26は、アライナ28に基板90を装填する場合に、高精度であるがゆえに、狭いアライナ28の調整範囲にそれぞれの基板90が装填されるように、個々の基板90の位置を仮合わせする。これにより、アライナ28における基板90の位置決めが、迅速且つ正確にできる。
The pre-aligner 26 temporarily aligns the positions of the
アライナ28は、ロボットアーム24とロボットアーム30との間に配置されている。アライナ28は、枠体34と、固定ステージ36と、移動ステージ38と、一対のシャッタ40及びシャッタ42とを有する。
The
枠体34は、固定ステージ36及び移動ステージ38を囲むように形成されている。枠体34の基板カセット20側の面と、真空環境部16側の面には、基板90、重ね合わせ基板92及び貼り合わせ基板95を搬入及び搬出可能に、開口が形成されている。
The
固定ステージ36の下面は、基板90を保持した状態で、ロボットアーム30により移動ステージ38から搬送される基板ホルダ94を真空吸着する。
The lower surface of the fixed
移動ステージ38の上面は、基板90及び基板ホルダ94を真空吸着する。移動ステージ38は、枠体34の内部を水平方向及び鉛直方向に移動する。これにより、移動ステージ38が移動することによって、固定ステージ36に保持された基板90及び基板ホルダ94と、移動ステージ38に保持された基板90及び基板ホルダ94とが位置合わせされ、重ね合わされた状態で仮接合される。基板90と基板90は、接着剤によって仮接合してもよく、プラズマによって仮接合してもよい。
The upper surface of the moving
シャッタ40は、枠体34の基板カセット20側の開口を開閉する。シャッタ42は、枠体34の真空環境部16側の開口を開閉する。枠体34及びシャッタ40、42に囲まれた領域は、空気調整機等に連通されて、温度管理される。これにより、基板90と基板90との位置合わせの精度が向上する。
The
ロボットアーム30は、基板ホルダラック22に収容されている基板ホルダ94を移動ステージ38へと搬送する。ロボットアーム30は、移動ステージ38上に載置され、基板90を保持する基板ホルダ94を、裏返して固定ステージ36へと搬送する。ロボットアーム30は、移動ステージ38によって位置合わせされた一対の基板90を含む基板ホルダ94を真空吸着して、真空環境部16へと搬送する。ロボットアーム30は、貼り合わせ基板95を真空環境部16から移動ステージ38へと搬送する。
The
真空環境部16は、基板貼り合わせ装置10の貼り合わせ工程において、高温且つ真空状態に設定される。真空環境部16は、ロードロック室48と、一対のアクセスドア50及びゲートバルブ52と、ロボットアーム54と、3個の収容室55と、3個の加熱加圧装置56と、ロボットアーム58と、冷却室60とを備える。尚、加熱加圧装置56の個数は、3個に限定されるものではなく、適宜変更してもよい。
The
ロードロック室48は、大気環境部14と真空環境部16とを連結する。ロードロック室48は、真空状態及び大気圧に設定できる。ロードロック室48の大気環境部14側及び真空環境部16側には、一対の基板ホルダ94に保持された一対の基板90を含む重ね合わせ基板92及び貼り合わせ基板95を搬送可能に開口が形成されている。
The
アクセスドア50は、ロードロック室48の大気環境部14側の開口を開閉する。ゲートバルブ52は、ロードロック室48の真空環境部16側の開口を開閉する。ロボットアーム54は、ロボットアーム30によりロードロック室48に搬入された重ね合わせ基板92を何れかの加熱加圧装置56へと搬入する。
The
収容室55は、ゲートバルブ57を介してロボットチャンバ53と連結されている。収容室55は、重ね合わせ基板92及び貼り合わせ基板95を搬入及び搬出するために、ゲートバルブ57を開閉する。
The
3個の加熱加圧装置56は、ロボットアーム54を中心として放射状に配置されている。加熱加圧装置56は、重ね合わせ基板92を加熱及び加圧可能な構成となっている。加熱加圧装置56は、ロードロック室48から搬入された重ね合わせ基板92を貼り合わせることができる。
The three heating /
ロボットアーム58は、ロボットチャンバ53の中心に回動可能に配置されている。これにより、ロボットアーム58は、貼り合わせ基板95を加熱加圧装置56から冷却室60へと搬送できる。また、ロボットアーム58は、貼り合わせ基板95を冷却室60からロードロック室48へと搬送できる。
The
冷却室60は、冷却機能を有する。これにより、冷却室60は、ロボットアーム58によって結合された高温の貼り合わせ基板95を冷却できる。冷却室60は、ゲートバルブ57を介してロボットチャンバ53と連結されている。制御部18は、基板貼り合わせ装置10の全体の動作を制御する。
The cooling
図2から図5は、基板貼り合わせ装置10による貼り合わせ基板95の貼り合せ工程を説明する図である。貼り合わせ工程では、まず、図2に示すように、ロボットアーム30が、基板ホルダラック22から基板ホルダ94を移動ステージ38へと搬送する。ロボットアーム24は、基板カセット20の何れかからプリアライナ26を経由させて基板90を、移動ステージ38に載置された基板ホルダ94上に載置する。
2 to 5 are diagrams for explaining a bonding process of the bonded
ロボットアーム30は、基板90を保持する基板ホルダ94を移動ステージ38から固定ステージ36へと裏返して搬送する。図3に示すように、固定ステージ36は、基板90とともに基板ホルダ94をロボットアーム30から受け取った後、基板ホルダ94を真空吸着により保持する。
The
次に、同様の動作によって、ロボットアーム30が移動ステージ38に基板ホルダ94を搬送した後、ロボットアーム24が移動ステージ38上の基板ホルダ94に基板90を搬送する。移動ステージ38は、基板90及び基板ホルダ94を保持しつつ、基板90及び基板ホルダ94を保持する固定ステージ36の下方へと移動する。これにより、移動ステージ38の基板90と、固定ステージ36の基板90とが互いに位置決めされる。
Next, after the
次に、図4に示すように、移動ステージ38が、上方へと移動して、移動ステージ38の基板90の上面と固定ステージ36の基板90の下面とが合わされる。この後、ロボットアーム30が、移動ステージ38上の重ね合わせ基板92をロードロック室48へと搬送する。この後、ロボットアーム54が、重ね合わせ基板92をロードロック室48から加熱加圧装置56へと搬入する。
Next, as shown in FIG. 4, the moving
次に、貼り合わせ段階において、加熱加圧装置56は、重ね合わせ基板92を結合温度まで加熱した後、結合温度を維持しつつ、重ね合わせ基板92を上下方向から加圧する。これにより、重ね合わせ基板92の基板90、90が、貼り合わされて貼り合わせ基板95となる。この後、ロボットアーム58が、貼り合わせ基板95を冷却室60へと搬入する。冷却室60は貼り合わせ基板95を冷却する。ロボットアーム58は冷却された貼り合わせ基板95を基板ホルダ94とともに、冷却室60からロードロック室48へと搬送する。
Next, in the bonding step, the heating and pressurizing
次に、ロボットアーム30が、貼り合わせ基板95をロードロック室48から移動ステージ38へと搬送する。図5に示すように、移動ステージ38上にて、ロボットアーム30により、貼り合わせ基板95が基板ホルダ94から分離される。この後、ロボットアーム24が、貼り合わせ基板95を基板カセット20の何れかに搬出する。これにより、基板貼り合わせ装置10による貼り合わせ工程が終了して、貼り合わせ基板95が完成する。この後、図5に示す点線に沿って、貼り合わせ基板95が個片化されて積層半導体装置96が完成する。
Next, the
図6は、クランプ機構の一方の基板ホルダ94である上基板ホルダ100の底面図である。図7は、下方から見た上基板ホルダ100の斜視図である。図7に矢印で示す上下を上下方向とする。図6及び図7に示すように、上基板ホルダ100は、上載置部102と、上耳部104と、一対の上静電パッド106及び107と、3個の結合部108と、上給電端子120、122と、複数の上連結具112とを有する。上載置部102と、上耳部104とが第1ホルダ本体の一例である。
FIG. 6 is a bottom view of the
上載置部102は、許容応力が120MPaであって、熱膨張係数が4.5×10−6/℃のAlN等のセラミックからなる。上載置部102は、基板90よりも一回り大きい略円板状に形成されている。上載置部102の下面は、平面状に形成されている。上載置部102の下面は、上耳部104よりも下側に突出している。上載置部102の中央部の下面は、基板90が載置される載置面として機能する。
The upper mounting
上耳部104は、搬送時にロボットアーム24、30、54、58等によって支持される。上耳部104は、リング状に形成されている。上耳部104は、周方向において、分割された3個に上耳片部材124を有する。各上耳片部材124は、周方向に沿って、互いに離間して配置されている。即ち、隣接する上耳片部材124の間には間隔が形成されている。上耳部104の内周は、上載置部102の外周と略同形状に形成されている。上耳部104の内周は、上載置部102の外周縁に連結されている。また、上耳部104はロボットアーム24に代えてまたはこれに加えて、仮置き台のピンのような他の部材により支持されるのに用いられてもよい。
The
上耳部104の外周には、複数の切り欠き126が形成されている。切り欠き126は、複数の機能を有する。例えば、切り欠き126は、上基板ホルダ100と後述する下基板ホルダとを離脱させる押上げピンが通される。切り欠き126の周辺は、高温レーザで加工されている。これにより、加圧後、常温に戻った状態において、圧縮応力が切り欠き126の周辺に作用する。この結果、圧縮応力の変形によるひずみを切り欠き126によって吸収して、上耳部104の破損を抑制できる。
A plurality of
上静電パッド106は、半円形状に形成されている。上静電パッド106、107は、上載置部102の内部に埋め込まれている。一方の上静電パッド106は、上載置部102の中心を挟み、他方の上静電パッド107と線対称となるように配置されている。上給電端子120、122は、上耳部104の外周部に設けられている。上給電端子120、122は、上耳部104の上面及び下面の両面に配置されている。上給電端子120、122は、搬送中にロボットアーム24、30、54、58等に電気的に接続されて、電力が供給される。上給電端子120は、一方の上静電パッド106に電力を供給して、正の電荷をチャージする。上給電端子122は、他方の上静電パッド107に電力を供給して負の電荷をチャージする。これにより、上静電パッド106は、静電気力を発生させて、基板90を静電吸着する。
The upper
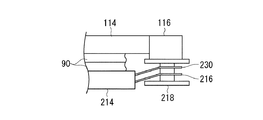
3個の結合部108は、上載置部102の外周側であって、上耳部104が途切れている個所に配置されている。3個の結合部108は、周方向において、略120°間隔で配置されている。各結合部108は、上連結部材114と、第1結合部材の一例である一対の結合部材116とを有する。上連結部材114は、平面視において、上載置部102の周方向に長い略長方形状に形成されている。上連結部材114は、上載置部102の外周部に連結されている。一対の結合部材116は、上連結部材114を介して、上載置部102に設けられている。一対の結合部材116は、結合用の永久磁石を有する。
The three
上連結具112は、上載置部102を上耳部104に対して径方向に移動可能に付勢しつつ、上載置部102と上耳部104とを弾性を有して連結する。
The
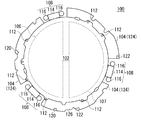
図8は、クランプ機構の他方の基板ホルダ94である下基板ホルダ200の上面図である。図9は、上方から見た下基板ホルダ200の斜視図である。図10は、挟持状態における被結合部208の近傍の拡大斜視図である。図9に矢印で示す上下を上下方向とする。図8、図9及び図10に示すように、下基板ホルダ200は、下載置部202と、下耳部204と、一対の下静電パッド206及び下静電パッド207と、3個の被結合部208、208、208と、下給電端子222、224と、下連結具228とを有する。下載置部202と、下耳部204とが第2ホルダ本体の一例である。
FIG. 8 is a top view of the
下載置部202は、基板90よりも一回り大きい略円板状に形成されている。下載置部202の上面は、平面状に形成されている。下載置部202の上面は、下耳部204よりも上側に突出している。下載置部202の中央部の上面は、基板90が載置される載置面として機能する。下載置部202は、上載置部102との間で一対の基板90を挟持する。
The
下耳部204は、搬送時にロボットアーム24、30、54、58などによって支持される。下耳部204は、リング状に形成されている。下耳部204は、周方向において、3個に分割された下耳片部材220を有する。各下耳片部材220は、周方向に沿って、離間して配置されている。下耳部204の内周は、下載置部202の外周と略同形状に形成されている。下耳部204の内周は、下載置部202の外周に固定されている。下耳部204の外周には、切り欠き126と同様の機能を有する切り欠き210が形成されている。
The
下静電パッド206は、半円形状に形成されている。下静電パッド206、207は、下載置部202の内部に埋め込まれている。一方の下静電パッド206は、下載置部202の中心を挟み、他方の下静電パッド207と線対称となるように配置されている。下給電端子222、224は、下耳部204の下面に形成されている。一方の下静電パッド206は、下給電端子222から供給される電力によって負に帯電する。他方の下静電パッド207は、下給電端子224から供給される電力によって正に帯電する。これにより、下静電パッド206は、静電気力を発生させて、基板90を静電吸着する。
The lower
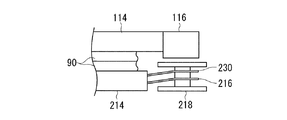
3個の被結合部208は、下載置部202の外周側であって、下耳部204が途切れている個所に配置されている。3個の被結合部208は、周方向において、略120°間隔で配置されている。各被結合部208は、下連結部材214と、弾性部材の一例である一対の下弾性部材216と、第2結合部材の一例である一対の被結合部材218と、応力低減部230とを有する。
The three coupled
下連結部材214は、平面視において、略正方形状に形成されている。下連結部材214は、下載置部202の外周部に連結されている。下弾性部材216は、弾性変形可能な板バネによって構成されている。下弾性部材216は、周方向に長い長方形状に形成されている。下弾性部材216の一端部は、下連結部材214に連結されている。下弾性部材216の他端部は、被結合部材218に対して上下方向の移動ができないように、被結合部材218に連結されている。これにより、下弾性部材216は、下連結部材214を介して、被結合部材218を下載置部202に連結する。
The lower connecting
ここで、下弾性部材216は、上基板ホルダ100と下基板ホルダ200との間に挟み込まれる基板90の厚さが変化しても結合部材116と被結合部材218とを互いに結合させる。すなわち、下弾性部材216は、結合部材116と被結合部材218との結合方向に沿った相対移動を可能にさせる。ここでいう結合方向とは、基板90の法線方向である。また、下弾性部材216は、結合部材116と被結合部材218とが互いに結合した状態で上基板ホルダ100及び下基板ホルダ200同士が基板90の面方向の相対移動を拘束すべく結合部材116及び被結合部材218の面方向に沿った相対移動を拘束する。ここでいう面方向とは、基板90の面に平行な方向であって、基板90の面の法線と直交する方向である。更に、下弾性部材216は、弾性変形による反力を、上基板ホルダ100と下基板ホルダ200との間の一対の基板90を挟みこむ力として作用させる。
Here, the lower
被結合部材218は、磁石に吸着される材料、例えば、強磁性体材料を含む。被結合部材218は、下連結部材214及び下弾性部材216を介して、下載置部202に設けられている。一対の被結合部材218は、結合部材116と対向する位置に配置されている。これにより、上基板ホルダ100の下面と下基板ホルダ200の上面とが対向した状態で近接すると、被結合部材218は、結合部材116に磁力によって吸着されて、互いに結合される。この結果、上基板ホルダ100及び下基板ホルダ200によって基板90、90が保持される。この基板保持状態では、下弾性部材216は弾性変形して、上基板ホルダ100及び下基板ホルダ200から基板90、90に作用する押圧力を適切に調整する。
The coupled
応力低減部230は、下弾性部材216と同じ板バネによって構成されている。応力低減部230の厚みの一例は、0.1mmである。応力低減部230の一端部は、下連結部材214に連結されている。従って、三対の応力低減部230は、下載置部202の中心の周りに120°間隔で配置される。これにより、三対の応力低減部230は、平面視において、下載置部202及び下耳部204により構成される下基板ホルダ本体の中心の周りで点対称となる。応力低減部230の他端部は、被結合部材218に対して上下方向の移動ができないように、被結合部材218に連結されている。応力低減部230は、下連結部材214を介して、被結合部材218と下載置部202とを連結する。また、応力低減部230は、固定されていない被結合部材218に連結されているので、片持ちである。応力低減部230は、下弾性部材216よりも上方に配置されている。尚、応力低減部230は、下弾性部材216よりも下方に配置してもよい。応力低減部230は、下弾性部材216と平行に配置されている。応力低減部230と下弾性部材216との間隔の一例は、0.7mmである。尚、応力低減部230と下弾性部材216との間隔は、被結合部材218の平行度を保つために大きい方が好ましい。応力低減部230は、被結合部材218の水平方向に対する傾斜を規制する。これにより、応力低減部230は、被結合部材218を上下方向に沿って平行に移動させる。この結果、応力低減部230は、基板90を挟持するために結合部材116と被結合部材218とが結合することにより、下弾性部材216に発生する基板90の面方向の応力を低減する。
The
次に、上基板ホルダ100と下基板ホルダ200による一対の基板90の挟持について説明する。
Next, sandwiching of the pair of
まず、応力低減部230がない場合の基板90の挟持について説明する。図11、図12及び図13は、応力低減部230がない場合の基板90の挟持について説明する図である。図11に示すように、上基板ホルダ100によって保持された基板90と、下基板ホルダ200によって保持された基板90とが位置合わせされた後、互いに接触する。これにより、図12に示すように、結合部材116が、磁力による吸着力によって、被結合部材218を引き寄せる。ここで、被結合部材218は、下弾性部材216によってのみ下連結部材214に連結されている。従って、被結合部材218は、下弾性部材216の下連結部材214側の端部を中心にして、紙面左回りに回転する。これにより、被結合部材218は、傾斜した状態で、結合部材116と接触する。この後、被結合部材218は、結合部材116との接点を中心に紙面右回りに回転する。この結果、図13に示すように、被結合部材218は、水平状態になって、結合部材116に結合される。ここで、被結合部材218が傾斜及び回転等の複雑な動きをするので、図13に示す結合状態では、下弾性部材216に歪みが生じているので、下弾性部材216に復元するための弾性力が生じる。この復元により、下弾性部材216の弾性力が応力として、被結合部材218に作用するので、基板90と基板90との相対位置がずれる。
First, the clamping of the
次に、本実施形態の基板90の挟持について説明する。図14、図15及び図16は、応力低減部230を有する本実施形態における基板90の挟持について説明する図である。図14に示すように、上基板ホルダ100によって保持された基板90と、下基板ホルダ200によって保持された基板90とが位置合わせされた後、互いに接触する。これにより、図15に示すように、結合部材116が、磁力による吸着力によって、被結合部材218を引き寄せる。ここで、被結合部材218は、下弾性部材216及び応力低減部230によって支持されている。これにより、被結合部材218は、水平方向の移動が規制されているので、被結合部材218は、水平状態を維持しつつ、結合部材116に接近する。この後、図16に示すように、被結合部材218の上面と結合部材116の下面とが略平行に面接触する。この結合状態において、下弾性部材216及び応力低減部230には、歪みが生じていないので、被結合部材218に応力が作用しない。この結果、基板90と基板90との相対位置の位置ずれを抑制できる。
Next, clamping of the
次に、上述した実施形態における応力低減部230の支持機構を変更した実施形態について説明する。図17は、支持機構を変更した応力低減部1230を有する被結合部1208の部分斜視図である。応力低減部1230は、下弾性部材216と同じ板バネからなる。図17に示すように、下弾性部材216及び応力低減部1230の一端部は、下耳片部材220の端部に連結されている。下弾性部材216及び応力低減部1230の他端部は、下連結部材214に向かって延び、被結合部材218に連結されている。応力低減部1230は、下弾性部材216と平行に設けられている。これにより、この実施形態においても、応力低減部1230が、下弾性部材216の歪みを抑制して、被結合部材218に作用する応力を低減できる。
Next, an embodiment in which the support mechanism of the
図18は、応力低減部330の別の実施形態を説明する被結合部308近傍の部分斜視図である。図19は、結合部108及び被結合部308の側方から見た概略図である。図18及び図19に示すように、下基板ホルダ200の被結合部308は、下弾性部材216と、被結合部材218と、応力低減部330とを有する。下弾性部材216、被結合部材218、及び、応力低減部330は、それぞれ三対ずつ下基板ホルダ200に設けられている。
FIG. 18 is a partial perspective view of the vicinity of the coupled
下弾性部材216は、板バネからなる。下弾性部材216の一端部は、下耳片部材220の端部に連結されている。下弾性部材216の他端部は、下連結部材214に向かって延び、被結合部材218に連結されている。
The lower
応力低減部330は、非磁性体材料からなる。応力低減部330の基板90の面方向の剛性は、下弾性部材216の基板90の面方向の剛性よりも大きい。応力低減部330の基板90の面方向と交差する方向の剛性は、下弾性部材216の基板90の面方向と交差する方向の剛性よりも小さい。応力低減部330は、板状に形成されている。応力低減部330の一端部は、下耳片部材220の端部に連結されている。一対の応力低減部330は、下連結部材214を挟み両側に配置されている。三対の応力低減部330は、平面視において、下載置部202及び下耳部204により構成される下基板ホルダ本体の中心の周りで点対称となるように、中心の周りに120°感覚で配置されている。応力低減部330の他端部は、下連結部材214に向かって延びる。応力低減部330の他端部は、いずれの構成にも連結されていない。即ち、応力低減部330は、片持ちである。応力低減部330の一部は、結合部材116と被結合部材218とが接触する面の一例である被結合部材218の上面を覆う。尚、応力低減部330は、被結合部材218の上面よりも上方に配置してもよい。この場合、基板90の面と垂直な方向において、応力低減部330のストロークを、下弾性部材216のストロークよりも小さくしてもよい。応力低減部330は、被結合部材218の上面に固定されていない。即ち、応力低減部330の他端は、下耳片部材220に連結された一端を中心に、上下方向に移動できる。応力低減部330の下面と被結合部材218の上面との間に生じる摩擦力は、応力低減部330の上面と結合部材116の下面との間に生じる摩擦力よりも小さい。
The
次に、図18に示す被結合部308の動作について説明する。図20及び図21は、被結合部308の動作を説明する図である。
Next, the operation of the coupled
まず、図19に示すように、上基板ホルダ100によって保持された基板90と、下基板ホルダ200によって保持された基板90とが位置合わせされた後、互いに接触する。ここで、応力低減部330は、非磁性体からなるので、基板90同士が位置合わせされるまで、結合部材116に吸着されて接触することがない。
First, as shown in FIG. 19, the
次に、図20に示すように、結合部材116が、磁力によって被結合部材218を引き寄せる。これにより、被結合部材218が、応力低減部330を介して、結合部材116に結合される。この状態では、下弾性部材216は、弾性変形して、歪みが下弾性部材216に生じる。ここで、応力低減部330の下面と被結合部材218の上面との間に生じる摩擦力は、応力低減部330の上面と結合部材116の下面との間に生じる摩擦力よりも小さい。また、応力低減部330の基板90の面方向の剛性は、下弾性部材216の基板90の面方向の剛性よりも大きい。
Next, as shown in FIG. 20, the
従って、下弾性部材216の歪みによって生じる応力によって、摩擦力が小さく、剛性の小さい被結合部材218の上面が応力低減部330の下面を摺動する。一方、結合部材116の下面は、摩擦力が大きいので、応力低減部330の上面を摺動しない。これにより、図21に示すように、下弾性部材216が復元して、応力が低減されても、被結合部材218と下載置部202との相対位置が変わるだけで、上基板ホルダ100と下基板ホルダ200との相対位置、即ち、一対の基板90同士の相対位置は変わらない。
Therefore, due to the stress generated by the distortion of the lower
また、応力低減部330の下面と被結合部材218の上面との間に生じる摩擦力が、下弾性部材216の復元力より大きくてもよい。これにより、下弾性部材216が弾性変形しても、応力低減部330が、下弾性部材216から下載置部202に作用する応力を低減しつつ、下弾性部材216の復元を防止できる。
Further, the frictional force generated between the lower surface of the
次に、図18に示す被結合部308の一部を変形した例について説明する。図22は、図18に示す被結合部308の一部を変形した被結合部1308近傍の部分斜視図である。図23は、結合部108及び被結合部1308の側方から見た概略図である。被結合部1308は、応力低減部1330以外の構成は、図18に示す被結合部308と同様の構成である。
Next, an example in which a part of the coupled
図22及び図23に示すように、被結合部1308の応力低減部1330は、応力低減部材1332と、補強部1334とを有する。応力低減部材1332は、上述の応力低減部330と同じ構成である。補強部1334は、応力低減部材1332の両側辺のうち、結合部材116と接する領域の両側辺に一体的に設けられている。補強部1334は、当該側辺から被結合部材218側へと延びる。補強部1334は、非磁性体からなり、応力低減部材1332の面と交差する面に平行な板状に形成されている。
As illustrated in FIGS. 22 and 23, the
補強部1334は、鉛直面と略平行に設けられている。補強部1334は、板状の応力低減部材1332を補強する。これにより、補強部1334は、応力低減部材1332の変形、特に、結合部材116と接触する領域の応力低減部材1332の変形を抑制できる。また、応力低減部材1332は、上述の応力低減部330と同様の作用及び効果を奏することができる。
The reinforcing
上述の実施形態では、補強部1334が、被結合部材218側へ延びるように折り曲げられているが、補強部1334は、被結合部材218とは反対側、即ち、上基板ホルダ100側へと折り曲げられていてもよい。この場合、基板90が、上基板ホルダ100及び下基板ホルダ200によって挟持される前に、下基板ホルダ200の下載置部202の上面を滑っても、補強部1334が基板90の脱落を防ぐことができる。
In the above-described embodiment, the reinforcing
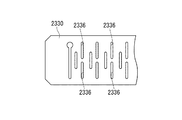
図24は、別の実施形態の被結合部2308近傍の部分斜視図である。図25は、被結合部2308の応力低減部2330の平面図である。被結合部2308の応力低減部2330以外の構成は、図18に示す被結合部2308と同様の構成である。図24に示すように、被結合部2308の応力低減部2330の一端部は、下耳片部材220に連結されている。応力低減部2330の他端部は、下連結部材214に連結されている。換言すれば、応力低減部2330は、両持ちで支持されている。応力低減部2330は、非磁性体からなり、板状に形成されている。応力低減部2330の下面と被結合部材218の上面との間に生じる摩擦力は、応力低減部2330の上面と結合部材116の下面との間に生じる摩擦力よりも小さい。
FIG. 24 is a partial perspective view of the vicinity of the coupled
ここで、図24及び図25に示すように、応力低減部2330には、複数の変形溝2336が形成されている。変形溝2336は、応力低減部2330を弾性変形の変形量を増加させる。これにより、両持ちの応力低減部2330の両端部が、弾性変形して、応力低減部2330の中央部が上下方向に移動できる。従って、被結合部材218が結合部材116に結合されると、応力低減部2330は被結合部材218の上面を覆いつつ、結合部材116の方向へと移動する。結合状態では、応力低減部2330は、被結合部材218と結合部材116との間で挟まれる。これにより、応力低減部2330は、上述の応力低減部330と同様の作用及び効果を奏することができる。
Here, as shown in FIGS. 24 and 25, the
図26は、別の実施形態の被結合部3308近傍の部分斜視図である。被結合部3308の応力低減部3330以外の構成は、図18に示す被結合部308と同様の構成である。
FIG. 26 is a partial perspective view of the vicinity of the coupled
図26に示すように、被結合部3308の応力低減部3330は、応力低減部材3332と、補強部3334とを有する。応力低減部材3332は、上述の応力低減部2330と同じ構成である。補強部3334は、応力低減部材3332の両側辺のうち、結合部材116と接する領域の両側辺に一体的に設けられている。補強部3334は、非磁性体からなり、板状に形成されている。補強部3334は、鉛直面と略平行に設けられている。補強部3334は、板状の応力低減部材3332を補強する。これにより、補強部3334は、応力低減部材3332の変形、特に、結合部材116と接触する領域の応力低減部材3332の変形を抑制できる。これにより、応力低減部3330は、上述の応力低減部2330と同様の作用及び効果を奏することができる。
As shown in FIG. 26, the
図27は、別の実施形態の上基板ホルダ100の結合部408近傍の部分斜視図である。図28は、結合部408の分解斜視図である。図27は、上基板ホルダ100を下方から見た斜視図である。尚、本実施形態における被結合部は、図11に示すように、被結合部材218が下弾性部材216によって支持されていればよい。図27及び図28に示すように、結合部408は、結合部材416と、応力低減部430とを有する。
FIG. 27 is a partial perspective view of the vicinity of the
結合部材416は、結合用永久磁石の一例である。結合部材416は、円柱状のアルニコ磁石等の永久磁石からなる。
The
応力低減部430は、結合部材416の結合用の磁力の強度を変化させる。応力低減部430は、保持部材446と、磁力遮断部材448と、回動部452と、低減用永久磁石部の一例である磁力遮断部材454と、軸部材438と、一対のアクチュエータ440及びアクチュエータ442とを有する。保持部材446は、磁性体からなる。保持部材446は、上耳片部材124に固定されている。保持部材446には、軸部材438が挿通される軸穴450が形成されている。
The
磁力遮断部材448は、リング状であって、ステンレスのSUS304等の非磁性体からなる。磁力遮断部材448は、保持部材446の内部に埋め込まれている。これにより、磁力遮断部材448は、磁性体で囲まれる。回動部452は、中空形状に形成された磁性体からなる。回動部452には、軸部材438が挿通される軸穴456が形成されている。回動部452は、軸部材438によって、保持部材446と連結されている。回動部452は、軸部材438の周りに回動する。従って、回動部452は、保持部材446に対して相対的に回動する。
The
磁力遮断部材454は、回動部452の内部に埋め込まれている。磁力遮断部材454は、磁力遮断部材448と同じ形状のリング状である。磁力遮断部材454は、ステンレスのSUS304等の非磁性体からなる。磁力遮断部材454は、平面視において、磁力遮断部材448と中心が一致する結合位置と、磁力遮断部材448と中心がずれる解除位置との間で軸部材438の周りを回動する。即ち、結合位置では、平面視において、磁力遮断部材448と磁力遮断部材454は、同じ位置となり、解除位置では、磁力遮断部材448と磁力遮断部材454は、異なる位置となる。結合位置では、磁力遮断部材454と磁力遮断部材448の外周部に磁束が形成されて、結合部材416の結合用の磁力が作用する。一方、解除位置では、磁力遮断部材454と磁力遮断部材448とによって、結合部材416の磁束が遮断される。これにより、結合部材416の磁力が低減されて、結合部材416と被結合部材218との結合が解除される。
The magnetic
一対のアクチュエータ440、442は、移動部の一例である。一対のアクチュエータ440、442は、回動部452を軸部材438の周りで回動させる。これにより、一対のアクチュエータ440、442は、磁力遮断部材454と磁力遮断部材448との相対位置を変更する。アクチュエータ440、442には、ソレノイドアクチュエータ等を適用できる。
The pair of
図29、図30、図31、図32及び図33は、結合部408の動作を説明する図である。図29、図31及び図33は、側方から見た結合部408の一部断面図である。図30及び図32は、結合部408の平面図である。尚、図30及び図32においては、説明上、磁力遮断部材454は、磁力遮断部材448よりも太く記載している。
29, 30, 31, 32, and 33 are diagrams for explaining the operation of the
まず、図29に示すように、上基板ホルダ100と下基板ホルダ200とが、上下に配置されることにより、一対の基板90同士が向かい合わせに配置される。次に、図30及び図31に示すように、一対の基板90同士を接触させる。この状態では、磁力遮断部材448の中心と、磁力遮断部材454の中心とがずれている。これにより、磁力遮断部材448と、磁力遮断部材454とによって、結合部材416の磁束が遮断されて、磁束がほとんど外部に漏れない状態となる。
First, as shown in FIG. 29, the
次に、この状態で、一対の基板90同士を位置合わせする。ここで、結合部材416の磁束がほとんど出ていないので、結合部材416と被結合部材218との間に磁力はほとんど作用しない。従って、上基板ホルダ100と下基板ホルダ200とが、位置合わせする場合に、水平方向に沿って移動しても、結合部材416と被結合部材218との間に摩擦力はほとんど作用しない。従って、被結合部材218と連結された下弾性部材216に歪みが生じない。
Next, in this state, the pair of
次に、図32及び図33に示すように、アクチュエータ440が、駆動して、回動部452を磁力遮断部材454とともに、軸部材438の周りに回動させる。これにより、磁力遮断部材454の中心と、磁力遮断部材448の中心とが一致して、磁力遮断部材454と磁力遮断部材448と外側に結合部材416の磁束が形成される。従って、吸着力が結合部材416と被結合部材218との間に作用する。この結果、結合部材416が被結合部材218を吸着して、一対の基板90が、上基板ホルダ100と下基板ホルダ200とによって挟持される。
Next, as shown in FIGS. 32 and 33, the
上述したように、本実施形態では、結合部材416の磁束が、磁力遮断部材448、454によって遮断される。これにより、応力低減部430は、下弾性部材216に生じる歪みに起因する応力を低減できる。この結果、応力低減部430は、位置合わせされた一対の基板90同士の位置ずれを抑制できる。尚、磁力遮断部材454が回動する例を示したが、磁力遮断部材454は直線的に移動させてもよい。
As described above, in this embodiment, the magnetic flux of the
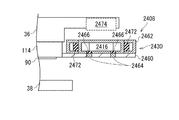
図34は、別の実施形態の結合部2408の概略図である。図34に示すように、結合部2408は、結合部材2416と、応力低減部2430とを有する。
FIG. 34 is a schematic view of a
結合部材2416は、円柱状のアルニコ磁石等の永久磁石からなる。結合部材2416は、被結合部材218を吸着する。
The
応力低減部2430は、固定部2460と、筐体2462と、固定用永久磁石2472と、駆動用電磁石2474と、一対の磁力遮断部材2464及び磁力遮断部材2466とを有する。
The
固定部2460は、上連結部材114に固定されている。固定部2460は、炭素鋼のS25C等の磁性体からなる。
The fixing
筐体2462は、炭素鋼のS25C等の磁性体からなる。筐体2462は、中空状に形成されている。筐体2462は、結合部材2416と、固定用永久磁石2472とを収容する。筐体2462は、固定部2460に対して着脱可能に設置されている。
The
固定用永久磁石2472は、磁力によって結合部材2416を固定部2460に固定する。駆動用電磁石2474は、固定ステージ36に設けられている。駆動用電磁石2474は、固定用永久磁石2472の磁力よりも強い磁力を結合部材2416に作用させる。これにより、駆動用電磁石2474は、固定用永久磁石2472とともに、結合部材2416を固定部2460から離脱させる。
The fixing
磁力遮断部材2464、2466は、結合部材2416と略同じ直径を有するリング状に形成されている。磁力遮断部材2464、2466は、ステンレスのSUS304等の非磁性体からなる。磁力遮断部材2464は、固定部2460に埋め込まれている。磁力遮断部材2466は、筐体2462の底面に埋め込まれている。従って、磁力遮断部材2466は、筐体2462とともに上下方向に移動する。平面視において、磁力遮断部材2466は、磁力遮断部材2464と同じ位置に配置されている。これにより、結合部材2416の磁束が、磁力遮断部材2464、2466の外側に形成されて、結合部材2416の磁力が、被結合部材218に吸着力として作用する。
The magnetic
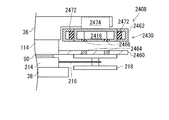
次に、結合部2408の動作を説明する。図35から図37は、結合部2408の動作を説明する図である。まず、図34に示すように、上基板ホルダ100が、基板90とともに、固定ステージ36に搬送されて保持される。この状態では、筐体2462が結合部材2416及び固定用永久磁石2472とともに、固定部2460に保持されている。
Next, the operation of the combining
次に、図35に示すように、駆動用電磁石2474を駆動させる。これにより、結合部材2416を駆動用電磁石2474に吸着させる磁力が生じるので、結合部材2416が、固定用永久磁石2472とともに、固定部2460から離脱する。この状態で、下基板ホルダ200が、基板90とともに、移動ステージ38に搬送されて保持される。
Next, as shown in FIG. 35, the driving
次に、図36に示すように、移動ステージ38が上方に移動して、一対の基板90同士を接触させる。この状態で、移動ステージ38を水平面内で移動させて、一対の基板90同士を位置合わせする。ここで、移動ステージ38が移動しても、結合部材2416が上方に離脱しているので、結合部材2416と被結合部材218との間に吸着力が作用していない。これにより、被結合部材218を支持する下弾性部材216に歪みが生じない。換言すれば、応力低減部2430が、歪みに起因して下弾性部材216から被結合部材218に作用する応力を低減している。
Next, as shown in FIG. 36, the moving
次に、図37に示すように、一対の基板90同士の位置合わせが完了すると、駆動用電磁石2474を停止させる。これにより、結合部材2416は、固定部2460に引き寄せられるので、駆動用電磁石2474から離脱する。結合部材2416が、固定部2460に結合するとともに、結合部材2416と被結合部材218とが、固定部2460を介して、磁力によって吸着される。この結果、一対の基板90が、上基板ホルダ100と下基板ホルダ200とによって挟持される。
Next, as shown in FIG. 37, when the alignment between the pair of
図38は、別の応力低減部530を説明する概略図である。図38に示すように、応力低減部530は、磁力制御用電磁石の一例であるコイル部580と、応力制御部582と、冷却部584と、ロードセル586とを有する。
FIG. 38 is a schematic diagram illustrating another
コイル部580は、被結合部材218の外周部に巻かれている。コイル部580は、電力が供給されると、結合部材116から発生する結合用の磁力を低減させる磁力を発生させる。これにより、コイル部580は、結合部材116と被結合部材218との間の吸着力を低減させる。また、コイル部580は、結合用の磁力を増加させる磁力を発生させる。これにより、コイル部580は、結合部材116と被結合部材218との間の吸着力を増加させる。
The
ロードセル586は、被結合部材218を支持する。ロードセル586に被結合部材218が載置されると、ロードセル586は、被結合部材218による負荷を検出する。この状態で、結合部材116が被結合部材218に接近すると、被結合部材218が結合部材116に引き寄せられるので、ロードセル586に作用する負荷が低減する。これにより、ロードセル586は、結合部材116の磁力を検出する。冷却部584は、磁力を発生させるための電力が供給されているコイル部580を冷却する。
The
応力制御部582は、コイル部580と接続及び離脱可能に構成されている。応力制御部582は、冷却部584及びロードセル586と接続されている。これにより、応力制御部582は、コイル部580と、冷却部584と、ロードセル586とを制御する。例えば、応力制御部582は、コイル部580の磁力を制御する。
The
応力低減部530では、基板90同士の位置合わせが完了するまでは、応力制御部582がコイル部580に電力を供給するとともに、冷却部584を駆動させてコイル部580を冷却する。これにより、結合部材116と被結合部材218との間の磁力が、コイル部580から生じる磁力によってキャンセルされる。この結果、結合部材116と被結合部材218との間に吸着力が発生しないので、結合部材116は、被結合部材218を吸着しない。従って、被結合部材218は、結合部材116に対して自由に移動できるので、位置合わせの間、下基板ホルダ200を移動させても、下弾性部材216に歪みが生じない。この後、基板90同士の位置合わせが完了すると、応力制御部582は、コイル部580の電力を徐々に弱くする。これにより、コイル部580の磁力によりキャンセルされる結合部材116の磁力が徐々に少なくなり、被結合部材218と結合する結合部材116の吸着力が徐々に強くなる。これにより、結合部材116が被結合部材218と結合する。ここで、吸着力が徐々に強くなるので、結合部材116と被結合部材218との間が離脱している状態から結合されても、結合による下弾性部材216の歪みが生じ難い。従って、歪みに起因する下弾性部材216の応力を低減できる。換言すれば、応力低減部530は、コイル部580を制御することにより、下弾性部材216の応力を低減している。
In the
図39は、別の下弾性部材616及び被結合部材618を説明する図である。図40は、下弾性部材616の平面図である。図41は、被結合部材618の分解図である。
FIG. 39 is a diagram illustrating another lower
図39及び図40に示すように、下弾性部材616は、長手方向に延びる摺動溝617が形成されている。
As shown in FIGS. 39 and 40, the lower
図39及び図41に示すように、被結合部材618は、上被結合部位620と、下被結合部位622と、連結軸624とを有する。
As shown in FIGS. 39 and 41, the member to be coupled 618 includes an upper coupled
上被結合部位620の上部は、円板状に形成されている。上被結合部位620の上部以外には、円筒状の上円筒部626が形成されている。上円筒部626の外径は、摺動溝617の幅よりも大きい。上被結合部位620の下部には、嵌入部628が形成されている。嵌入部628は、下被結合部位622に嵌入される。また、嵌入部628は、摺動溝617に挿通される。嵌入部628の直径は、摺動溝617の幅と略同じである。上被結合部位620の側面には、上連結溝630が形成されている。
The upper part of the upper coupled
下被結合部位622の下部は、円板状に形成されている。下被結合部位622の下部以外には、円筒状の下円筒部632が形成されている。下円筒部632の外径は、上円筒部626の外径と同じであって、摺動溝617の幅よりも大きい。下被結合部位622には、上連結溝630と連続する下連結溝634が形成されている。
The lower part of the lower
連結軸624は、上連結溝630及び下連結溝634に挿通される。これにより、連結軸624は、上被結合部位620と下被結合部位622とが離脱することを抑制しつつ、上被結合部位620と下被結合部位622とを上下方向に相対移動可能に連結する。
The
図42は、非結合状態における被結合部材618の側面図である。図43は、結合状態における被結合部材618の側面図である。
FIG. 42 is a side view of the
図42に示すように、非結合状態では、自重によって、下被結合部位622が、上被結合部位620に対して下限位置に配置されている。この後、結合部材116が被結合部材618に接近すると、被結合部材618は、下弾性部材616の摺動溝617を摺動しつつ、結合部材116に磁力により吸着される。すなわち、被結合部材618が結合部材116に吸着されるまでは、被結合部材618と下弾性部材616とが、互いに相対移動できる。被結合部材618が結合部材116に接すると、上被結合部位620は停止するが、下被結合部位622は更に結合部材116に吸着される。これにより、図43に示すように、嵌入部628が、更に下被結合部位622に嵌入されるので、上円筒部626の下面と下円筒部632の上面とによって、下弾性部材616が挟持される。この結果、被結合部材618が下弾性部材616に固定される。すなわち、被結合部材618が結合部材116に吸着されて結合した後は、被結合部材618と下弾性部材616との相対移動が不可になる。ここで、被結合部材618は、下弾性部材616を摺動しつつ、結合されるので、下弾性部材616に歪みが生じない。これにより、下弾性部材616の応力を低減できる。この実施形態では、下弾性部材616と被結合部材618が、応力低減部を兼ねるといえる。
As shown in FIG. 42, in the unbound state, the lower
上述した各実施形態の構成の形状、配置、個数、材料、数値等は適宜変更してよい。また、各実施形態を適宜組み合わせてもよい。例えば、下弾性部材の枚数は適宜変更してよい。 The shape, arrangement, number, material, numerical value and the like of the configuration of each embodiment described above may be changed as appropriate. Moreover, you may combine each embodiment suitably. For example, the number of lower elastic members may be changed as appropriate.
図18から図26における応力低減部は、上基板ホルダ100に設けてもよい。平板状の基板ホルダを例にあげたが、いずれか一方または両方がリング状の基板ホルダに上述の実施形態を適用してもよい。また、結合部材と被結合部材は、真空吸着、分子間力、および、接着剤等によって結合させてもよく、それらの組み合わせによって結合させてもよい。
The stress reduction unit in FIGS. 18 to 26 may be provided in the
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。 As mentioned above, although this invention was demonstrated using embodiment, the technical scope of this invention is not limited to the range as described in the said embodiment. It will be apparent to those skilled in the art that various modifications or improvements can be added to the above-described embodiment. It is apparent from the scope of the claims that the embodiments added with such changes or improvements can be included in the technical scope of the present invention.
特許請求の範囲、明細書、および図面中において示した装置、システム、プログラム、および方法における動作、手順、ステップ、および段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を後の処理で用いるのでない限り、任意の順序で実現しうることに留意すべきである。特許請求の範囲、明細書、および図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。 The order of execution of each process such as operations, procedures, steps, and stages in the apparatus, system, program, and method shown in the claims, the description, and the drawings is particularly “before” or “prior to”. It should be noted that the output can be realized in any order unless the output of the previous process is used in the subsequent process. Regarding the operation flow in the claims, the description, and the drawings, even if it is described using “first”, “next”, etc. for convenience, it means that it is essential to carry out in this order. It is not a thing.
10 基板貼り合わせ装置、 12 環境チャンバ、 14 大気環境部、 16 真空環境部、 18 制御部、 20 基板カセット、 22 基板ホルダラック、 24 ロボットアーム、 26 プリアライナ、 28 アライナ、 30 ロボットアーム、 34 枠体、 36 固定ステージ、 38 移動ステージ、 40 シャッタ、 42 シャッタ、 48 ロードロック室、 50 アクセスドア、 52 ゲートバルブ、 53 ロボットチャンバ、 54 ロボットアーム、 55 収容室、 56 加熱加圧装置、 57 ゲートバルブ、 58 ロボットアーム、 60 冷却室、 90 基板、 92 重ね合わせ基板、 94 基板ホルダ、 95 貼り合わせ基板、 96 積層半導体装置、 100 上基板ホルダ、 102 上載置部、 104 上耳部、 106 上静電パッド、 107 上静電パッド、 108 結合部、 112 上連結具、 114 上連結部材、 116 結合部材、 120 上給電端子、 122 上給電端子、 124 上耳片部材、 126 切り欠き、 200 下基板ホルダ、 202 下載置部、 204 下耳部、 206 下静電パッド、 207 下静電パッド、 208 被結合部、 210 切り欠き、 214 下連結部材、 216 下弾性部材、 218 被結合部材、 220 下耳片部材、 222 下給電端子、 224 下給電端子、 228 下連結具、 230 応力低減部、 308 被結合部、 330 応力低減部、 408 結合部、 416 結合部材、 430 応力低減部、 438 軸部材、 440 アクチュエータ、 442 アクチュエータ、 446 保持部材、 448 磁力遮断部材、 450 軸穴、 452 回動部、 454 磁力遮断部材、 456 軸穴、 530 応力低減部、 580 コイル部、 582 応力制御部、 584 冷却部、 586 ロードセル、 616 下弾性部材、 617 摺動溝、 618 被結合部材、 620 上被結合部位、 622 下被結合部位、 624 連結軸、 626 上円筒部、 628 嵌入部、 630 上連結溝、 632 下円筒部、 634 下連結溝、 1208 被結合部、 1230 応力低減部、 1308 被結合部、 1330 応力低減部、 1332 応力低減部材、 1334 補強部、 2308 被結合部、 2330 応力低減部、 2336 変形溝、 2408 結合部、 2416 結合部材、 2430 応力低減部、 2460 固定部、 2462 筐体、 2464 磁力遮断部材、 2466 磁力遮断部材、 2472 固定用永久磁石、 2474 駆動用電磁石、 3308 被結合部、 3330 応力低減部、 3332 応力低減部材、 3334 補強部 DESCRIPTION OF SYMBOLS 10 Board | substrate bonding apparatus, 12 Environmental chamber, 14 Atmospheric environment part, 16 Vacuum environment part, 18 Control part, 20 Substrate cassette, 22 Substrate holder rack, 24 Robot arm, 26 Pre-aligner, 28 aligner, 30 Robot arm, 34 Frame , 36 fixed stage, 38 moving stage, 40 shutter, 42 shutter, 48 load lock chamber, 50 access door, 52 gate valve, 53 robot chamber, 54 robot arm, 55 receiving chamber, 56 heating and pressurizing device, 57 gate valve, 58 robot arm, 60 cooling chamber, 90 substrate, 92 superimposed substrate, 94 substrate holder, 95 bonded substrate, 96 laminated semiconductor device, 100 Upper substrate holder, 102 Upper placement part, 104 Upper ear part, 106 Upper electrostatic pad, 107 Upper electrostatic pad, 108 Coupling part, 112 Upper coupling tool, 114 Upper coupling member, 116 Coupling member, 120 Upper power supply terminal, 122 Upper feeding terminal, 124 Upper ear piece member, 126 Notch, 200 Lower substrate holder, 202 Lower mounting portion, 204 Lower ear portion, 206 Lower electrostatic pad, 207 Lower electrostatic pad, 208 Coupled portion, 210 Notch, 214 lower connecting member, 216 lower elastic member, 218 coupled member, 220 lower ear piece member, 222 lower feeding terminal, 224 lower feeding terminal, 228 lower coupling tool, 230 stress reducing portion, 308 coupled portion, 330 stress reducing portion , 408 joint, 416 joint Material, 430 Stress reducing part, 438 Shaft member, 440 Actuator, 442 Actuator, 446 Holding member, 448 Magnetic shielding member, 450 Shaft hole, 452 Rotating part, 454 Magnetic shielding member, 456 Shaft hole, 530 Stress reducing part, 580 Coil part, 582 Stress control part, 584 Cooling part, 586 Load cell, 616 Lower elastic member, 617 Sliding groove, 618 Member to be joined, 620 Upper part to be joined, 622 Lower part to be joined, 624 Connecting shaft, 626 Upper cylindrical part , 628 fitting part, 630 upper connecting groove, 632 lower cylindrical part, 634 lower connecting groove, 1208 coupled part, 1230 stress reducing part, 1308 coupled part, 1330 stress reducing part, 1332 stress reducing member, 1 334 Reinforcement part, 2308 To-be-joined part, 2330 Stress reduction part, 2336 Deformation groove, 2408 Coupling part, 2416 Coupling member, 2430 Stress reduction part, 2460 Fixing part, 2462 Housing, 2464 Magnetic shielding member, 2466 Magnetic shielding member Permanent magnet for fixing, 2474 electromagnet for driving, 3308 coupled portion, 3330 stress reducing portion, 3332 stress reducing member, 3334 reinforcing portion
Claims (14)
前記ホルダ本体に弾性部材を介して連結され、前記ホルダ本体との間で前記基板を保持する他の基板ホルダに結合される結合部材と、
前記結合部材の結合状態において、前記結合部材の結合時に前記弾性部材に生じた応力を低減する応力低減部と、
を備える基板ホルダ。 A holder body for placing a substrate;
A coupling member coupled to the holder body via an elastic member and coupled to another substrate holder that holds the substrate between the holder body ;
A stress reduction unit that reduces stress generated in the elastic member when the coupling member is coupled in the coupled state of the coupling member;
A substrate holder comprising:
前記結合部材は、前記結合面と前記他の基板ホルダとの間に前記応力低減部材を挟み込んで前記他の基板ホルダと結合し、
前記応力低減部材と前記結合面との間の摩擦力は、前記応力低減部材と前記他の基板ホルダの結合部材との間の摩擦力よりも小さい請求項2に記載の基板ホルダ。 The stress reduction portion, prior SL is connected at one end to the holder body has a plate-shaped stress reducing member covering the coupling surface of part of the coupling member,
The coupling member is coupled to the other substrate holder by sandwiching the stress reducing member between the coupling surface and the other substrate holder,
The substrate holder according to claim 2, wherein a frictional force between the stress reducing member and the coupling surface is smaller than a frictional force between the stress reducing member and the coupling member of the other substrate holder.
複数の前記応力低減部材は、平面視において、前記ホルダ本体の中心の周りで点対称となるように配置されている請求項3に記載の基板ホルダ。 Before SL stress reduction portion includes a plurality of said stress reducing member,
The substrate holder according to claim 3, wherein the plurality of stress reducing members are arranged so as to be point symmetric around the center of the holder body in a plan view.
前記第1結合部材に結合される第2結合部材を有し、前記第1基板ホルダとの間で複数の前記基板を保持する第2基板ホルダと、
前記第1結合部材と前記第2結合部材との結合状態において、前記第1結合部材および前記第2結合部材の結合時に前記弾性部材に生じた応力を低減する応力低減部と、
を有する基板ホルダ対。 A first substrate holder having a holder body for placing a substrate and a first coupling member connected to the holder body via an elastic member;
A second substrate holder having a second coupling member coupled to the first coupling member, and holding the plurality of substrates with the first substrate holder;
A stress reduction unit that reduces stress generated in the elastic member when the first coupling member and the second coupling member are coupled in the coupled state of the first coupling member and the second coupling member;
A pair of substrate holders.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012074651A JP5970909B2 (en) | 2012-03-28 | 2012-03-28 | Clamp mechanism and substrate bonding apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012074651A JP5970909B2 (en) | 2012-03-28 | 2012-03-28 | Clamp mechanism and substrate bonding apparatus |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013207094A JP2013207094A (en) | 2013-10-07 |
| JP2013207094A5 JP2013207094A5 (en) | 2015-05-21 |
| JP5970909B2 true JP5970909B2 (en) | 2016-08-17 |
Family
ID=49525886
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012074651A Active JP5970909B2 (en) | 2012-03-28 | 2012-03-28 | Clamp mechanism and substrate bonding apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5970909B2 (en) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4852891B2 (en) * | 2005-05-31 | 2012-01-11 | 株式会社ニコン | Wafer holder, wafer stacking method, and stacked semiconductor device manufacturing method |
| JP5098165B2 (en) * | 2005-12-08 | 2012-12-12 | 株式会社ニコン | Wafer bonding method, bonding apparatus, and manufacturing method of stacked semiconductor device |
| JP5577585B2 (en) * | 2008-11-12 | 2014-08-27 | 株式会社ニコン | Substrate holding member, bonding apparatus, and bonding method |
-
2012
- 2012-03-28 JP JP2012074651A patent/JP5970909B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013207094A (en) | 2013-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6112016B2 (en) | Substrate holder and substrate bonding apparatus | |
| JP5979135B2 (en) | Substrate laminating apparatus, substrate holding apparatus, substrate laminating method, substrate holding method, laminated semiconductor device, and superimposed substrate | |
| KR101669045B1 (en) | Substrate holding member, substrate bonding apparatus, apparatus for manufacturing multilayer substrate, substrate bonding method, method for manufacturing multilayer substrate, and method for manufacturing multilayer semiconductor device | |
| JP6051523B2 (en) | Substrate holder pair, substrate bonding apparatus, and device manufacturing method | |
| JP2011216832A (en) | Substrate overlapping device, substrate holder, substrate overlapping system, method of overlapping substrate, method of manufacturing device, and apparatus and method for joining substrate | |
| JP5305220B2 (en) | Substrate bonding device | |
| JP5428638B2 (en) | Stage device, substrate bonding apparatus, substrate bonding method, semiconductor manufacturing method, and substrate holder | |
| JP5970909B2 (en) | Clamp mechanism and substrate bonding apparatus | |
| JP5476705B2 (en) | Multilayer semiconductor manufacturing apparatus, multilayer semiconductor manufacturing method, and substrate holder rack | |
| JP5593748B2 (en) | Positioning apparatus, substrate bonding apparatus, and substrate bonding method | |
| JP5493713B2 (en) | Substrate holder, substrate bonding apparatus, substrate holder pair, and transfer apparatus | |
| JP2012253269A (en) | Substrate holder and substrate bonding apparatus | |
| TWI836247B (en) | Manufacturing method of substrate bonding device and semiconductor device | |
| JP2012253273A (en) | Substrate bonding device | |
| JP2013026555A (en) | Management device | |
| JP2013232663A (en) | Substrate holder apparatus and substrate bonding apparatus | |
| JP5853425B2 (en) | Substrate bonding equipment | |
| JP2014222778A (en) | Stage device and substrate sticking device | |
| JP2011129777A (en) | Substrate overlaying device and manufacturing method of the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150407 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151013 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160614 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160627 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5970909 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |