解剖学的欠陥に跨がって埋め込まれかつ第1の状態において示された一対のアンカ本体を有するアンカアセンブリの概略的な側面図である。
図1Aに示されたアンカアセンブリの概略的な側面図であり、拡張された状態及び近接された位置におけるアンカ本体を示している。
図1Aに示されたアンカ本体と、アンカ本体の作動部分を取り付けるよう構成されたコネクタ部材とを含むアンカアセンブリの側面図であり、第1の状態におけるアンカ本体を示している。
図1Cに示されたアンカアセンブリの側面図であり、拡張した状態におけるアンカ本体によって締め付けられたコネクタ部材を示している。
図1Cと同様の、ただし一体のコネクタ部材を有するアンカアセンブリの側面図である。
図1Eに示されたアンカアセンブリの側面図であり、拡張した状態におけるアンカ本体によって締め付けられたコネクタ部材を示している。
解剖学的欠陥を跨いで埋め込まれて示されかつ第1の状態において示された、択一的な実施の形態により構成された一対のアンカ本体を有するアンカアセンブリの概略的な側面図である。
拡張した状態及び近接させられた状態におけるアンカ本体を示す、図1Gに示したアンカアセンブリの概略的な側面図である。
解剖学的欠陥の互いに反対の側において解剖学的構造に埋め込まれかつ第1の状態において示された第1及び第2のアンカを有するアンカアセンブリの側面図である。
各々の拡張した状態における第1及び第2のアンカを示す、図2Aに示されたアンカアセンブリの側面図である。
第1のアンカを第2のアンカに取り付けるコネクタ部材を有する、図2Aに示されたアンカアセンブリの側面図である。
少なくとも1つのアンカと、挿入器具とを含む固定キットの側面図である。
図3Aに示された固定キットの、側方から見た断面図である。
第1の回転状態において示された、択一的な実施の形態により構成された固定キットの縦断面図である。
線4B−4Bに沿って見た、図4Aに示されたキットの、側方から見た断面図である。
図4Aに示された、ただし一対の開口が整合させられた第2の回転状態において示された、固定キットの、側方から見た断面図である。
線4D−4Dに沿って見た、図4Cに示された固定キットの、側方から見た断面図である。
組立中の挿入器具の、側方から見た断面図である。
図5Aに示された、ただし組み立てられた示された挿入器具の、側方から見た断面図である。
図5Bに示された挿入器具のハンドルの、側方から見た断面図である。
図5Cに示されたハンドルの斜視図である。
別の実施の形態により構成された固定キットの側面図である。
ケーシングと、ケーシングから延びたカニューレとを有する、択一的な実施の形態により構成された挿入器具を含む固定キットの斜視図であり、器具は、第1及び第2のアンカ本体が挿入器具に装填されている第1の状態において示されている。
図7Aに示された挿入器具のカニューレの拡大された斜視図である。
図7Aに示された挿入器具のケーシングの、側方から見た断面図である。
図7Aに示された挿入器具のカニューレの、拡大された、側方から見た断面図である。
第2のアンカ本体を挿入器具から排出するための第2の位置における挿入器具を示す、図7Aに示した固定キットの斜視図であり、第2のアンカ本体は第1の状態において示されている。
図8Aに示された挿入器具のカニューレの拡大された斜視図である。
図8Aに示されたケーシングの、側方から見た断面図である。
図8Aに示されたカニューレの、側方から見た断面図である。
図8Aに示された固定キットの斜視図であり、オフセット位置における挿入器具を示している。
図9Aに示された挿入器具のカニューレの拡大された斜視図である。
図9Aに示された挿入器具のケーシングの、側方から見た断面図である。
図9Aに示された挿入器具のカニューレの、側方から見た断面図である。
図9Aに示された固定キットの斜視図であり、拡張した状態における第2のアンカ本体を示している。
図9Aに示された固定キットの斜視図であり、中間ストロークの完了時の中間位置における挿入器具を示している。
図10Aに示された挿入器具のカニューレの、拡大された斜視図である。
図10Aに示された挿入器具のケーシングの、側方から見た断面図である。
図10Aに示された挿入器具のカニューレの、側方から見た断面図である。
図10Aに示された固定キットの斜視図であり、中間ストローク後の第2のストロークの第1の部分の完了時の挿入器具を示している。
図11Aに示された挿入器具のカニューレの拡大された斜視図である。
図11Aに示された挿入器具のケーシングの、側方から見た断面図である。
図11Aに示された挿入器具のケーシングの、側方から見た断面図である。
図11Aに示された固定キットの斜視図であり、第1のアンカ本体を挿入器具から排出する、第2のストロークの第2の部分の完了時の第3の位置における挿入器具を示しており、第1のアンカ本体は第1の状態において示されている。
図12Aに示された挿入器具のカニューレの拡大された斜視図である。
図12Aに示された挿入器具のケーシングの、側方から見た断面図である。
図12Aに示された挿入器具のカニューレの、側方から見た断面図である。
図12Aと同様の、ただし拡張した状態における第1のアンカ本体を示す、固定キットの斜視図である。
ストランド保持機構の解放後の、図12Aに示された挿入器具のケーシングの、側方から見た断面図である。
器具が第1の位置にあるときのガイドシステムを示すために一部が省略された、図7Aに示された挿入器具の斜視図である。
器具が第2の位置にあるときのガイドシステムを示す、図8Aに示された挿入器具の斜視図である。
挿入器具がオフセット位置にあるときのガイドシステムを示すために一部が省略された、図9Aに示された挿入器具の斜視図である。
挿入器具が中間位置にあるときのガイドシステムを示すために一部が省略された、図10Aに示された挿入器具の斜視図である。
挿入器具が第2のストロークの第1の部分を完了したときのガイドシステムを示すために一部が省略された、図11Aに示された挿入器具の斜視図である。
挿入器具が第2のストロークの第2の部分を完了したときのガイドシステムを示すために一部が省略された、図12Aに示された挿入器具の斜視図である。
図13Aに示されたガイドシステムのガイド軌道の斜視図である。
1つの実施の形態により構成されたカップリングアセンブリの斜視図である。
第1の作動モードにおいて示された、図14Aに示されたカップリングアセンブリの、側方から見た断面図である。
第1の作動モードと第2の作動モードとの移行状態において示された、図14Bに示されたカップリングアセンブリの、側方から見た断面図である。
第2の作動モードにおいて示された、図14Cにおいて示されたカップリングアセンブリの、側方から見た断面図である。
第1の作動モードに配置されたカップリングアセンブリを示す、別の実施の形態により構成された挿入器具の、側方から見た断面図である。
線15B−15Bに沿って見た、図15Aに示されたカップリングアセンブリの、端面側から見た断面図である。
図15Aに示された、ただし第1の作動モードから第2の作動モードへ移行するカップリングアセンブリを示す、挿入器具の、側方から見た断面図である。
線15D−15Dに沿って見た、図15Cに示されたカップリングアセンブリの、端面側から見た断面図である。
図15Cに示された、ただし第2の作動モードにおけるカップリングアセンブリを示す、挿入器具の、側方から見た断面図である。
第1の状態において埋め込まれたアンカ本体のうちの一方を示す、択一的な実施の形態による引張ストランドを有する、図1Gに示されたアンカアセンブリの概略的な側面図である。
図16Aに示された、ただし拡張した状態における、埋め込まれたアンカ本体を示す、アンカアセンブリの概略的な側面図である。
第1の状態において埋め込まれた別のアンカ本体を示す、図16Bに示されたアンカアセンブリの概略的な側面図である。
拡張した状態における別のアンカ本体を示す、図16Cに示されたアンカアセンブリの概略的な側面図である。
ロッキング部材のロッキングを示す、図16Dに示されたアンカアセンブリの概略的な側面図である。
第1の組み立てられた状態において示された、図16Eに示されたアンカアセンブリの概略的な側面図である。
解放可能なロッキング部材を示す、1つの実施の形態により構成されたストランド保持アセンブリの斜視図である。
固定されたロッキング部材を示す、図17Aに示されたストランド保持アセンブリの斜視図である。
アクチュエータに作用的に結合された、図17Aに示されたストランド保持アセンブリの斜視図である。
解放された位置において示された、図17Cに示されたストランド保持アセンブリの斜視図である。
第1の状態におけるアンカ本体を示す、択一的な実施の形態による一対の引張ストランドを含む、図1Gに示されたアンカアセンブリの概略的な側面図である。
図18Aに示された、ただし拡張した状態におけるアンカ本体を示す、アンカアセンブリの概略的な側面図である。
図18Bに示された、ロッキング部材の作動及び解剖学的間隙の接近を示す、アンカアセンブリの概略的な側面図である。
ロッキング部材のロッキングを示す、図18Cに示されたアンカアセンブリの概略的な側面図である。
最終的な組み立てられた状態において示された、図18Dに示されたアンカアセンブリの概略的な側面図である。
ロックされた状態において示された、別の実施の形態により構成された挿入器具の保持アセンブリの、側方から見た概略的な断面図である。
ロック解除された状態において示された、図19Aに示された挿入器具の保持アセンブリの、側方から見た概略的な断面図である。
図12Cに示された挿入器具と同様の、ただし択一的な実施の形態により構成された保持アセンブリを有する挿入器具のケーシングの、側方から見た断面図である。
解離された位置における切断アセンブリを示す、別の実施の形態による、切断アセンブリを有する挿入器具の、側方から見た断面図である。
図20Aに示された、ただし係合した位置における切断アセンブリを示す、挿入器具の、側方から見た断面図である。
図20Aに示された、ただし、解離された位置において示された、別の実施の形態により構成された切断アセンブリを有する、挿入器具の、側方から見た断面図である。
図21Aに示された、ただし係合した位置における切断アセンブリを示す、挿入器具の、側方から見た断面図である。
図7Aに示された、ただし択一的な実施の形態により構成された挿入器具の斜視図であり、第1の位置において示されている。
図22Aに示された挿入器具の側面図である。
図22Bに示された、ただし第2の位置において示された挿入器具の側面図である。
図22Cに示された、ただし第3の位置において示された挿入器具の側面図である。
図7Aに示された挿入器具と同様に構成された、ただし別の実施の形態により構成された挿入器具の斜視図であり、第1の位置において示されている。
図23Aに示された挿入器具のプランジャの斜視図である。
図23Aに示された挿入器具の遠位端部の斜視図である。
図23Bに示されたプランジャと、プッシュロッドと、一対のカップリング部材とを含む、図23Aに示された挿入器具の様々な構成部材の斜視図である。
図23Dに示された第1のカップリング部材と係合するよう構成された第2のカップリング部材の斜視図である。
第2の位置において示された、図23Aに示された挿入器具の斜視図である。
中間位置において示された、図23Fに示された挿入器具の斜視図である。
第3の位置において示された、図23Gに示された挿入器具の斜視図である。
第1の位置におけるプッシャアセンブリの各々を示す、並列関係に配置された第1及び第2のプッシャアセンブリを含む挿入器具の斜視図である。
第1のプッシャアセンブリからの第1のロックアウトタブの除去後の、図24Aに示された挿入器具の斜視図である。
第2の位置への第1のプッシャアセンブリの作動後の、図24Bに示された挿入器具の斜視図である。
第2のプッシャアセンブリからの第2のロックアウトタブの除去後の、図24Cに示された挿入器具の斜視図である。
スワップアクチュエータの作動後の、図24Dに示された挿入器具の斜視図である。
第2の位置への第2のプッシャアセンブリの作動後の、図24Eに示された挿入器具の斜視図である。
第1の位置における第1及び第2のプッシャアセンブリの各々を示す、図24Aに示された挿入器具の構成部材の斜視図である。
第1のプッシャアセンブリが第2の位置に作動させられた後の、図25Aに示された挿入器具の構成部材の斜視図である。
スワップアクチュエータの作動後の、図25Bに示された挿入器具の構成部材の斜視図である。
第2のプッシャアセンブリが第2の位置に作動させられた後の、図25Cに示された挿入器具の構成部材の斜視図である。
1つの実施の形態により構成された保持アセンブリの斜視図である。
図26Aに示された保持アセンブリの一部の拡大された斜視図である。
別の実施の形態により構成された挿入器具の斜視図であり、挿入器具は、並列関係に配置された第1及び第2のプッシャを有し、第1の位置におけるプッシャアセンブリの各々を示している。
位置構成への第1のプッシャアセンブリの作動後の、図27Aに示された挿入器具の斜視図である。
第1の位置から作動した位置へのスワップアクチュエータの作動後の、図27Bに示された挿入器具の構成部材の斜視図である。
第2の位置への第2のプッシャアセンブリの作動後の、図27Cに示された挿入器具の斜視図である。
スワップアクチュエータが第1の位置において示された、図27Aに示された挿入器具の構成部材の斜視図である。
スワップアクチュエータが第2の位置において示された、図28Aに示された挿入器具の構成部材の斜視図である。
別の実施の形態により構成された挿入器具の斜視図であり、挿入器具は、並列関係に配置された第1及び第2のプッシャアセンブリを有し、第1の位置におけるプッシャアセンブリの各々を示している。
図29Aに示された挿入器具の端面図である。
第2の位置における第1のプッシャアセンブリを示す、図29Aに示された挿入器具の斜視図である。
第1の位置から第2の位置へのスワップアクチュエータの作動後の、図29Cに示された挿入器具の斜視図である。
第2のプッシャアセンブリからのロックアウトタブの除去後の、図29Dに示された挿入器具の斜視図である。
第2の位置における第2のプッシャアセンブリを示す、図29Eに示された挿入器具の斜視図である。
スワップアクチュエータの一部を示す、図29Dに示された挿入器具の、端面側から見た概略的な断面図である。
別の実施の形態により構成された挿入器具の斜視図であり、挿入器具は、第1及び第2の、往復運動可能なカニューレを有し、図面は、挿入器具の内部の構成部材を露出させるために切り取られたケーシングの一部を示している。
図30Aに示された挿入器具の往復運動アセンブリの斜視図であり、往復運動アセンブリは、第1及び第2のカニューレを、往復するように駆動するよう構成されている。
図30Bに示された往復運動アセンブリの駆動部材の斜視図である。
プランジャを、第1及び第2のカニューレとの作用的な接続の間で選択的に移動させるよう構成された選択的なプランジャ係合アセンブリの斜視図である。
挿入器具の斜視図であり、カニューレは、別の実施の形態による側部排出ポートを形成している。
詳細な説明
最初に図1A及び図1Bを参照すると、アンカアセンブリ20は、第1の拡張可能なアンカ22a及び第2の拡張可能なアンカ22bのような少なくとも1つの拡張可能なアンカ22を有することができ、この拡張可能なアンカ自体は、少なくとも1つの解剖学的構造(生物体の構造)24によって形成することができる解剖学的位置(解剖学的構造の所定位置)に固定されるよう構成された各々のアンカ本体28a及び28bを有する。解剖学的構造24は、例えば、人間又はその他の動物の解剖学的構造、又は人間又はその他の動物の解剖学的構造に固定された又は固定されるよう構成されたインプラントによって形成することができる。解剖学的構造は、腱、靱帯、軟骨、椎間板の環、又は同様のもののような、骨及び軟組織のうちの少なくとも1つを含むことができる組織によって形成することができる。
1つの実施の形態によれば、少なくとも1つの解剖学的構造24は、間隙24cのような間隙の両側における第1及び第2の目標解剖学的位置24a及び24bを形成することができる。つまり、間隙24cは、解剖学的構造に配置することができ、例えば、解剖学的欠陥を形成することができるか、異なる解剖学的構造の間に配置することができる。第1及び第2のアンカ22a及び22bは、間隙24cの両側における各々の第1及び第2の目標解剖学的位置24a及び24bに噴射又はその他の形式で駆動又は挿入することができ、その後、間隙24cを狭めるために互いに向かって引っ張ることができる。択一的に又はさらに付加的に、アンカアセンブリ20を、補助構造を解剖学的構造に固定するよう構成することができる。これに関して、アンカアセンブリ20は、望みに応じてあらゆる数のアンカ22を有することができることをさらに認識すべきである。
各々のアンカ本体28a及び28bは、各々の拡張可能部分36a及び36bと、作動ストランド38a及び38bのような作動部材37a及び37bとを有することができる。作動ストランドは、各々の拡張可能部分36a及び36b、ひいては各々のアンカ本体28a及び28bを、アンカ本体28a及び28bが最初に目標解剖学的位置に配置された図1Aに示された第1の状態から、各々のアンカ本体28a及び28bを解剖学的構造24に固定することができる図1Bに示した拡張状態へ作動させるよう構成されている。つまり、アンカ22a及び22bのアンカ本体28a及び28bを、例えばアンカ本体28a及び28bを各々の目標解剖学的位置24a及び24bに噴射することによって、アンカ本体28a及び28bを各々の目標解剖学的位置24a及び24bに提供する時に形成することができる各々の目標解剖学的位置24a及び24bにおける開口23を通って挿入することができる。
アンカ本体28の拡張可能部分36は、第1の状態の時に延在方向34に沿って近位端部39aから遠位端部39bまで測定したときの初期距離D1を形成するように延在方向34に沿って延びている。初期距離D1は、望みに応じてあらゆる長さであることができ、例えば、約5mm、択一的に約10mm、さらに択一的に約20mm、さらに択一的に約24.5mmによって形成することができる下限と、約50mm、択一的に約40mm、さらに択一的に約30mm、さらに択一的に約25.5mmによって形成することができる上限とを有する範囲内の長さであることができる。
さらに、第1の状態の時に、拡張可能部分36は、延在方向34、つまり第1の方向に対して実質的に垂直な第2の方向35に延びた初期最大厚さT1を形成している。初期最大厚さT1は、望みに応じて寸法決めすることができる。図1Bに示したように、拡張可能部分36が拡張状態にあるとき、拡張可能部分36は、延在方向34に沿って、延在方向34に沿って近位端部39aから遠位端部39bまで測定したときの第2の距離D2に潰されている、例えば圧縮されている若しくはもつれさせられている。第2の距離D2は、初期距離D1より小さいことができる。拡張可能部分36が延在方向に沿って潰れたとき、例えば拡張可能部分36が第1の状態から拡張状態へ作動させられたとき、拡張可能部分36は、第2の方向35に沿って、初期最大厚さT1よりも大きな第2の最大厚さT2に拡張する。第2の最大厚さT2は、延在方向34に対して実質的に垂直な第2の方向35に沿って延びている。
第2の方向35における最大厚さT1及びT2は、アンカ本体28が、最大厚さT1及びT2それぞれよりも大きな第2の方向35における厚さを形成しないように、形成することができる。例えば拡張状態にある時の拡張可能部分36の状態により、拡張可能部分36が拡張状態に作動するときに近位端部39a及び遠位端部39bが拡張可能部分36における位置を変化させることができることを認識すべきである。しかしながら、拡張可能部分36が拡張状態にあるときに、近位端部39a及び遠位端部39bは、拡張可能部分36の最も近位の端部及び最も遠位の端部を形成し続け、これにより、拡張可能部分36が拡張状態にあるときに、延在方向34に沿った距離D2は、拡張可能部分36の近位端部39aと遠位端部39bとの間に線形に形成される。
第1及び第2のアンカ22a及び22bの各々の作動ストランド38を互いに取り付けることができる。例えば、第1のアンカ22aの作動ストランド38は、第2のアンカ22bの作動ストランド38と一体であることができる。択一的に、図2A〜図2Cを参照して以下でより詳細に説明するように、第1のアンカ22aの作動ストランド38は、第2のアンカ22bの作動ストランド38とは別個であることができ、これにより、第1及び第2のアンカ22a及び22bの作動ストランド38は、あらゆる適切なコネクタ部材63を用いて、直接的に又は間接的に、後から取り付けることができる。コネクタ部材63は、作動ストランド38a及び38bの一方又は両方と一体であることができるか又は各々の作動ストランド38a及び38bに別個に取り付けることができる。1つの実施の形態によれば、第1及び第2のアンカ22a及び22bそれぞれの作動ストランド38a及び38bは、少なくとも1つの各々の作動部分131a及び131bを形成しており、さらに、少なくとも1つの各々の取付け部分133a及び133bを有することができる。各々の作動部分131a及び131bは、各々のアンカ22a及び22bを第1の状態から拡張状態へ作動させる作動力を受け取るよう構成されている。
例示した実施の形態によれば、第1及び第2のアンカの作動ストランド38a及び38bの取付け部分133a及び133bは、間隙24cを横切って延びかつ第1のアンカ本体28aを第2のアンカ本体28bに取り付けるために、互いに取り付けられるよう構成されている。取付け部分133a及び133bは、互いに一体的であることができるか、又はあらゆる適切なコネクタ部材を用いて互いに取り付けることができる。さらに、例示した実施の形態によれば、作動部分131a及び131bも、作動力Fが作動部分131a及び131bに加えられる前又は後に、あらゆる適切な形式で互いに取り付けられるよう構成された取付け部分を形成することができる。つまり、各々のアンカ22a及び22bの取付け部分133a及び133bは、各々のアンカを、他方のアンカの取付け部分のような、別のアンカに取り付けるよう構成されている。さらに、各々のアンカ22aの作動部分131は、各々のアンカ22aを別のアンカ22bに取り付けるよう構成されている。例示された実施の形態によれば、第1のアンカ22aの作動ストランド38aの取付け部分133aは、第2のアンカ22bの作動ストランド38bの取付け部分133bと一体であるが、第1及び第2のアンカ22a及び22bの取付け部分133a,133bは、後でより詳細に説明するように、互いに別個でありかつ互いに取り付けることができることを認識すべきである。
引き続き図1A及び図1Bを参照すると、アンカ22a及び22bの拡張可能部分36a,36bが拡張状態に作動させられると、作動ストランド38a,38bを緊張した状態に配置することができる。例えば、1つの実施の形態によれば、接近力AFを、第1及び第2のアンカ22a及び22bの作動ストランド38a,38bの作動部分131a,131bのうちの一方又は両方に加えることができ、これにより、第1及び第2のアンカ22a及び22bを互いに向かって引っ張る付勢力を加えるために、第1及び第2のアンカ22a及び22bの作動ストランド38a,38bに張力を生ぜしめる。したがって、間隙24cが第1及び第2のアンカ22a及び22bの間に配置されていると、付勢力に応答した互いに向かうアンカ22a及び22bの移動は、幾つかの実施の形態において、上述の組織欠陥のような解剖学的欠陥であることができる間隙24cを狭める。
さらに、欠陥24が狭められた後に作動ストランド38a,38bが緊張状態に維持される場合、アンカ本体28が、解剖学的構造から各々の目標位置24a,24bを通って戻り出ることが防止される。この戻り出ることは、間隙24cを開放させる恐れがある。つまり、間隙24cが狭められると、第1及び第2のアンカ22a及び22bの間の張力を維持しかつ第1及び第2のアンカ22a及び22bが分離するのを防止するために、第1のアンカ22aの作動ストランド38aを第2のアンカ22bの作動ストランド38bに取り付けることができる。
各々のアンカ本体28a及び28bを貫通した複数の開口43を形成するために、ストランド、例えば縫合糸のストランドのような、あらゆる適切なサブストレートを、望まれるあらゆる形式で織ることによって、アンカ本体28a及び28bを構成することができる。第1及び第2の作動ストランド38a及び38bを、アンカ本体28a及び28bの延在方向34に沿って、開口43のうちの少なくとも2つを通って織ることができる。
図1A〜図1Fに示した実施の形態によれば、第1及び第2の作動ストランド38a及び38bは、各々の第1及び第2のアンカ本体28a及び28bと一体である。別の実施の形態によれば、第1及び第2の作動ストランド38a及び38bは、各々の第1及び第2のアンカ本体28a及び28bとは別個で、各々の第1及び第2のアンカ本体28a及び28bに取り付けられている(図2C参照)。さらに別の実施の形態によれば、第1及び第2の作動ストランド38a及び38bのうちの一方が、各々のアンカ本体と一体であり、第1及び第2の作動ストランド38a及び38bのうちの他方が、各々のアンカ本体とは別個であり、各々のアンカ本体に取り付けられている。第1及び第2の作動ストランド38a及び38bが各々の第1及び第2のアンカ本体28a及び28bと一体であるものとして例示及び説明されている実施の形態によれば、第1及び第2の作動ストランド38a及び38bは、択一的に、そうでないことが示されない限り、各々の第1及び第2のアンカ本体28a及び28bとは別個でありかつ各々の第1及び第2のアンカ本体28a及び28bに取り付けられていることができることを認めるべきである。さらに、第1及び第2の作動ストランド38a及び38bが、各々の第1及び第2のアンカ本体28a及び28bとは別個でありかつ各々の第1及び第2のアンカ本体28a及び28bに取り付けられているものとして例示されかつ説明されている実施の形態において、第1及び第2の作動ストランド38a及び38bは、択一的に、そうでないことが示されない限り、各々の第1及び第2のアンカ本体28a及び28bと一体であることができることを認めるべきである。
図1C〜図1Fを参照すると、アンカアセンブリ20は、アンカ22を接続するよう構成された少なくとも1つのコネクタ部材63を有することができ、アンカ22a及び22bを互いに引き寄せてこれにより解剖学的欠陥24を狭める付勢力がアンカ22a及び22bのうちの少なくとも一方に加えられることを許容する。コネクタ部材63は、第1及び第2のアンカ22a及び22bのうちの一方又は両方と一体であることができる、例えば第1及び第2の作動ストランド38a及び38bのうちの一方又は両方と一体であることができるか、第1及び第2のアンカ本体のうちの一方又は両方と一体であることができるか、又は第1及び第2のアンカ22a及び22bのうちの一方又は両方とは別個でありかつ第1及び第2のアンカ22a及び22bのうちの一方又は両方に(直接的に又は間接的に)取り付けられることができる。例えば、コネクタ部材63は、以下でより詳細に説明するように、第1及び第2のアンカ22a及び22bとは別個であることができ、第1及び第2のアンカ22a及び22bの間に取り付けることができる。コネクタ部材63が、様々な実施の形態にしたがってここで説明されているが、アンカアセンブリ20は、択一的に、第1のアンカ22aを第2のアンカ22bに取り付けるよう構成されたあらゆる適切なコネクタ部材を有することができることを認識すべきである。
アンカアセンブリ20は、対応する作動ストランド38a及び38b一体のコネクタ部材63を有することができる。上述のように、第1及び第2のアンカ本体28a及び28bの各々を、図2Aに示したように、間隙24cの互いに反対の側に配置された各々の第1の目標解剖学的位置24a及び24cにおいて埋め込むことができる。第1及び第2の作動ストランド38a及び38bの各々は、実質的に延在方向34に沿って作動力Fを受けることができ、この作動力Fは、各々の第1及び第2のアンカ本体28a及び28b、特に各々の拡張可能部分36a及び36bを第1の状態から拡張状態へ作動させ、これにより、第1及び第2のアンカ本体28a及び28bを、各々の第1及び第2の目標解剖学的位置24a及び24bに固定する。各々の作動ストランド38a及び38bに加えられる作動力Fは、異なる作動力の形態であることができるか、又は同じ作動力であることができる。
例えば、図1C及び図1Dを参照すると、コネクタ部材63は、補助的なコネクタ部材77、すなわち、第1及び第2の作動ストランド38a及び38bのうちの一方又は両方とは別個でありかつ第1及び第2の作動ストランド38a及び38bを互いに取り付けるよう構成されたコネクタ部材、であることができる。例えば、補助的なコネクタ部材77は、あらゆる適切な金属、プラスチック、又はあらゆる択一的な生体適合性材料から形成することができ、フレキシブル又は剛性であることができる、第1の作動ストランド38a及び38bのうちの一方又は両方、特に作動部分131a,131bに、アンカ22a及び22bの間の位置において取り付けられるよう構成されたボディ146として構成することができる。例えば、各々の第1及び第2の作動部分131a,131bを、アンロック状態からロック状態へ作動させられることができる結び目148を形成するために、ボディ146を通って縫い込み、ボディ146の周囲に結ぶことができる。第1及び第2の作動部分131a,131bは、結び目148がアンロック状態にある時にはボディ146に対して摺動可能であり、結び目148がロック状態にある時にはボディ146に対する摺動に関して固定されている。ボディ146は、実質的に円筒状のような、望みに応じたあらゆる形状を形成することができ、望みに応じてフレキシブル又は実質的に剛性であることができる。
作動中、作動部分131a,131bを、ボディ146を通って、解剖学的構造24から離れる方向に沿って縫い込み、各々の結び目148がアンロック状態になるようにボディ146の周囲に結ぶことができる。ボディ146を、その長軸149が実質的に解剖学的構造24に対して平行に向けられるように向けることができる。作動ストランド38a及び38bが緊張した状態にある間に、ボディ146を、第1及び第2の作動ストランド38a及び38bに沿って、矢印150の方向に沿って、解剖学的構造24に向かって並進させることができ、これは、作動ストランド38a及び38bを、ボディ146に対して、矢印152によって示された反対方向に沿って並進させる。ボディ146は作動ストランド38a及び38bに沿って間隙24cに向かって並進する時、ボディ146が作動ストランド38a及び38bに作動力Fを加え、これにより、アンカ22a及び22bを第1の状態から拡張状態へ作動させる。
アンカ22a及び22bが拡張状態に作動させられた後に、ボディ146がさらに間隙24cに向かって並進するとき、ボディ146は、作動ストランド38a及び38bのうちの少なくとも一方又は両方に接近力AFを加え、この接近力AFは、アンカ22a及び22bのうちの少なくとも一方又は両方を他方に向かって引っ張り、これにより、間隙24cを狭める。これに関して、接近力AFは作動力Fの継続であることができることを認識すべきである。これに代えて、作動力Fを、ボディ146の上流の位置において、又は作動ストランド38a及び38bをボディ146に取り付ける前に、作動ストランド38a及び38bに加えることができる。次いで、第1及び第2のアンカ22a及び22bの分離を防止するために第1及び第2の作動ストランド38a及び38bをボディ146に、ひいては互いに固定するために、結び目148を締め付けることができる。間隙24cが狭められると、ボディ146、ひいては結び目148を、解剖学的構造24の外面に沿って配置することができる。これに代えて、間隙24cが狭められると、ボディ146の一部、ひいては結び目148が、アンカ本体28a及び28bを収容する開口23に配置されるように、ボディ146を寸法決めすることができる。したがって、結び目148を、解剖学的構造24の背後に配置することができるか、又は解剖学的構造24に埋め込むことができる。
つまり、ボディ146は、間隙24cを狭めるために第1及び第2の作動ストランド38a及び38bのうちの一方を、第1及び第2の作動ストランド38a及び38bのうちの他方に対して摺動させる、摺動部材47を形成することができ、さらに、例えば第1及び第2のアンカ本体28a及び28bを分離させるような相対移動に関して、第1及び第2の作動ストランド38a及び38bを互いに固定するロッキング部材64を形成することができる。
ここで図1E及び図1Fを参照すると、アンカアセンブリ20は、作動部分131a及び131bのうちの少なくとも一方又は両方を各々の取付け部分133a及び133bに取り付けるよう構成された一対のコネクタ部材63a及び63bを有することができる。例示された実施の形態によれば、作動ストランド38a及び38bは、共通のストランドのような共通の作動部材によって形成されており、共通のストランドは、各々の取付け部分133a及び133bが互いに一体であるように、第1及び第2のアンカ本体28a,28bとは別個であり、かつ第1及び第2のアンカ本体28a,28bの少なくとも1つ、例えば一対又は複数の開口を通って織られた補助的なストランド33であることができる。つまり、例示された実施の形態によれば、第1及び第2の作動ストランド38a及び38bは互いに一体である。アンカアセンブリ20は、第1及び第2のコネクタ部材63a及び63bを有することができ、これらの第1及び第2のコネクタ部材63a及び63bは、作動ストランド38a及び38bによって形成されており、かつ作動部分131a及び131bを共通のストランドの別の位置に、つまり互いに取り付けるよう構成されている。例示された実施の形態によれば、第1のコネクタ部材63aは、対応する第1の作動部分131aを、第1の作動部分131aから間隔を置かれた補助ストランド33の別の位置に取り付けることができる。同様に、第2のコネクタ部材63bは、対応する第2の作動部分131bを、第2の作動部分131bから間隔を置かれた補助ストランド33の別の位置に取り付けることができる。例えば、例示された実施の形態によれば、第1のコネクタ部材63aは、第1の作動部分131aを第1の取付け部分133aに取り付け、第2のコネクタ部材63bは、第2の作動部分131bを第2の取付け部分133bに取り付ける。
つまり、第1及び第2のコネクタ部材63a及び63bのような少なくとも1つのコネクタ部材は、第1及び第2の作動部分131a及び131bを互いに、例えば取付け部分133a及び133bのうちの少なくとも一方又は両方を介して間接的に取り付けるために、第1及び第2の作動部分131a及び131bを、補助的なストランド33の各々の別の位置に取り付けることができると言うことができる。さらに、第1のコネクタ部材63aは、第1の作動ストランド38aの1つの部分を作動ストランド38aの別の部分に作用的に取り付け、第2のコネクタ部材63bは、第2の作動ストランド38bの1つの部分を第2の作動ストランド38bの別の位置に作用的に取り付けると言うことができる。これに代えて、第1及び第2のコネクタ部材63a及び63bは、各々の第1及び第2の作動部分131a及び131bを、各々の第1及び第2の端部52及び54などにおいて、アンカ本体28に取り付けることができることを認識すべきである。作動ストランド38a及び38は互いに別個であるものとして例示されているが、これに代えて、外側のコネクタストランドを形成するために、作動ストランド38a及び38bを、例えばここに記載されたタイプのあらゆる適切なコネクタ部材63を介して互いに取り付けることができる。
例示された実施の形態によれば、第1及び第2のコネクタ部材63a及び63bの各々は、補助的なストランド33によって形成された各々の結び目66a及び66bとして構成することができる。例示された実施の形態によれば、第1の結び目66aは、第1の作動ストランド38aの作動部分131aによって形成することができるポスト端部68と、自由端部とを有し、この自由端部は、第1の取付け部分133aの第1の端部137aによって形成された固定部分70aと、第1の取付け部分133aの第2の端部139aによって形成された自由部分70bとを有することができる。第1の端部137aを、結び目66aと第1のアンカ本体28aとの間に配置することができ、第2の端部139aを、結び目66aと第2のコネクタ部材63bとの間に配置することができる。これに代えて、自由部分70bを、第2の作動ストランド38bの取付け部分133bによって形成することができる。
1つの実施の形態によれば、第2の結び目66aは、第2の作動ストランド38bの作動部分131bによって形成することができるポスト端部68と、自由端部とを有し、この自由端部は、第2の取付け部分133bの第1の端部137bによって形成された固定部分70aと、第2の取付け部分133bの第2の端部139bによって形成された自由部分70bとを有することができる。第1の端部137bを、結び目66bと第2のアンカ本体28bとの間に配置することができ、第2の端部139bを、結び目66bと第1のコネクタ部材63aとの間に配置することができる。これに代えて、自由部分70bを、第1の作動ストランド38aの取付け部分133aによって形成することができる。取付け部分133a及び133bは、互いに一体であるものとして例示されているが、取付け部分133a及び133bは、別個であり、望みに応じて互いに取り付けることができることを認識すべきである。
第1及び第2の結び目66a及び66bの各々は、各々の摺動部材47を形成することができ、この摺動部材47は、各々のポスト端部68を、摺動部材47を通って、自由端部に対して並進させる。つまり、摺動部材47は、第1及び第2の作動部分131a及び131bを、第1及び第2の取付け部分133a及び133bに対して、例えば結び目66a及び66bがアンロック状態にある時に、加えられる作動力Fに応答して、並進させ、これにより、各々のアンカ本体28a及び28bを第1の状態から拡張状態に作動させる。各々の結び目66は、さらに、アンカ22a及び22bのうちの少なくとも一方又は両方を、各々の付勢された位置に固定するために、ロック状態に作動させることができるロッキング部材64を形成する。例えば、作動部分131a及び131bが取付け部分133a及び133bに対して結び目66a及び66bを通って並進することを防止するために、結び目66a及び66bの自由端部の自由部分70bに引張ロッキング力を加えることができる。
アンカ本体22a及び22bが各々の目標解剖学的位置24a及び24bに挿入された時に間隙24cが接近させられたまま維持されるように、第1及び第2の結び目66a及び66bを、補助ストランド33に沿って一定の距離Lだけ離反させることができる。例えば、結び目66a及び66bを各々の目標解剖学的位置24a及び24bに噴射する前に間隙24cを狭めることができる。作動中、第1及び第2のアンカ22a及び22bが各々の第1及び第2の目標解剖学的位置24a及び24bに埋め込まれると、各々の作動ストランド38a,38b、例えば作動部分131a,131bへの作動力Fの提供が各々のアンカ本体28a,28bを第1の状態から拡張状態へ作動させるように、結び目66a,66bをアンロック状態にすることができる。次いで、結び目66a,66bをロック状態に作動させかつアンカ22a,22bを拡張状態に維持するために、対応する結び目66a,66bに対抗して各々の取付け部分133a,133bに引張ロッキング力を加えることができる。
第1及び第2の結び目66a及び66bの間の距離Lは、目標解剖学的位置24a及び24bの間の距離と実質的に等しいか又はそれよりも小さくなっていることができ、これにより、第1及び第2のアンカ22a及び22bが、解剖学的構造の背後で拡張させられかつ補助的なストランド33によって接続された場合に、間隙24cが狭められ、作動ストランド38a及び38bにおいて生ぜしめられた張力は、間隙24cの狭まりを維持する。第1及び第2のコネクタ部材63a,63bを各々の結び目66として構成することができるが、これに代えて、第1及び第2のコネクタ部材63a及び63bのうちの一方又は両方を、ここに記載されたあらゆるタイプのあらゆる適切なロッキング部材63又はあらゆる適切な択一的に構成されたロッキング部材として構成することができることを認識すべきである。例えば、コネクタ部材63a,63bのうちの少なくとも一方又は両方は、スプライスを形成することができ、この場合、各々の作動ストランド38a,38bを作動ストランド38a,38bのうちの他方又はそれ自体を通って引き通すことができ、アンカストランド38a,38bの並進を防止する圧縮力を加えるためにアンカ22a及び22bの作動後にコネクタストランドが緊張状態に配置される。
アンカ本体28a及び28bを、望みに応じてあらゆる適切な実施の形態にしたがって構成することができることを認識すべきである。例えば、ここで図1G及び図1Hを参照すると、アンカ本体28a及び28bの各々は、各々の拡張可能部分36a及び36bの遠位端部から延びたアイレット90を有することができる。作動ストランド38を、アンカ本体28とは別個の補助的なストランド33として構成することができる。作動ストランドは、アンカ本体28a及び28bを通って織られることができ、アンカ本体28a及び28bが第1の状態から拡張状態に作動させられた時にアイレット90a及び90bが各々のアンカ本体28a及び28bを通って移動するための経路を形成するために、各々のアイレット90a及び90bを通って延びることができる。つまり、補助的なストランド33は、第1のアンカ本体28aを第2のアンカ本体28bに取り付けることができ、さらに、各々の目標解剖学的位置24a及び24に埋め込まれるとアンカ本体28a及び28bを第1の状態から拡張状態へ作動させる作動力Fを受けるよう構成することができる。
上述のように、アンカアセンブリ20は、第1及び第2の作動部分131a及び131bに取り付けられるよう構成することができるあらゆる適切なコネクタ部材63を有することができ、これにより、第1及び第2の作動ストランド38a及び38bを互いに取付け、アンカ22a及び22bをも互いに取り付ける。第1及び第2の作動ストランド38a及び38bは、互いに一体のものとして例示されており、つまり、共通の作動ストランドを形成している。これに代えて、第1及び第2の作動ストランド38a及び38bは、互いに別個であることができ、望まれるあらゆる形式で互いに取り付けられることができる。
図1G及び図1Hに例示した実施の形態によれば、コネクタ部材63は、第1及び第2の作動ストランド38a及び38bによって形成されており、第1及び第2の作動ストランド38a及び38b一体である。つまり、作動ストランド38a及び38bの作動部分131a及び131bは、互いに直接に取り付けられている。コネクタ部材63は、接合部125において摺動部材47とロッキング部材64とを形成することができる。例えば、コネクタ部材63は、望みに応じて構成することができる結び目66を形成することができ、作動ストランド38a及び38bのうちの一方又は両方によって形成することができる。つまり、コネクタ部材63の少なくとも一部は、作動ストランド38a及び38bのうちの少なくとも一方又は両方と一体であることができる。
第1及び第2の作動ストランド38a及び38bのうちの一方は、結び目66のポスト端部68を形成することができ、第1及び第2の作動ストランド38a及び38bのうちの他方は、結び目66の自由端部70を形成することができる。例示された実施の形態によれば、第1の作動部分131aのような第1の作動ストランドは、ポスト端部68を形成し、第2の作動部分131bのような第2の作動ストランド38bは、自由端部70を形成する。
第1及び第2のアンカ22a及び22bを互いに向かって付勢しかつ間隙24cを狭める作動ストランド38a及び38bへの張力を加える前に、第1及び第2の作動ストランド38a及び38bを結び目66に結ぶことができる。結び目66が形成されると、結び目66がアンロック状態にあるときに、各々の拡張可能部分36を第1の状態から拡張状態へ作動させるために、作動ストランド38a及び38bに、特に作動部分131a,131bに作動力Fを加えることができる。次いで、ポストストランド68を形成する第1の作動ストランド38aの末端部分135aに接近力AFを加えることができ、これにより、ポスト端部68を、結び目66を通って摺動させ、第1のアンカ22aのような各々のアンカを、第2のアンカ22bのような他方のアンカに向かって引っ張る。間隙24cが狭められると、例えば第2の作動ストランド38bの末端部分135bによって形成された、自由端部70の自由ストランド70bを緊張状態に配置することができ、結び目66をロックし、第1の作動ストランド38aが結び目66を通って並進することを防止し、これにより、作動ストランド38a及び38bを緊張状態に固定する。コネクタ部材63を結び目66として構成することができるが、これに代えて、コネクタ部材63を、ここに記載されたあらゆる実施の形態又は望みに応じてあらゆる適切な択一的なコネクタにしたがって構成することができることを認識すべきである。
ここで図2A〜図2Cを参照すると、図1A及び図1Bに関して上記で概略的に説明したように、アンカアセンブリ20は、第1及び第2のアンカ22a及び22bを有することができる。第1のアンカ22aは第1のアンカ本体28aを有し、この第1のアンカ本体28aは、実質的に延在方向34に沿って延びており、第1のアンカ本体28aを貫通した第1の複数の開口40aを形成している。第1のアンカ22aはさらに第1の作動ストランド38aを有し、この第1の作動ストランド38aは、開口40aのうちの少なくとも1つ、例えば複数の開口を通って延びており、作動力Fを受けるよう構成されている。この作動力Fは、上述の形式で第1のアンカ本体28aを第1の状態から拡張状態へ作動させる。第1の作動ストランド38aは、第1のアンカ本体28aとは別個であり、第1のアンカ本体28aに取り付けられることができ、例えば第1のアンカ本体28aの開口を通って編まれることができるか、又は第1のアンカ本体28aと一体で、第1のアンカ本体28aの開口を通って延びていることができる。
第2のアンカ22bは第2のアンカ本体28bを有し、この第2のアンカ本体28bは、実質的に延在方向34に沿って延びており、かつ第2のアンカ本体28bを貫通した第2の複数の開口40bを形成している。第2のアンカ22bはさらに第2の作動ストランド38bを有し、この第2の作動ストランド38bは、開口40bのうちの少なくとも1つ、例えば複数の開口を通って延びており、作動力Fを受けるよう構成されている。作動力Fは、上述の形式で第2のアンカ本体28bを第1の状態から拡張状態へ作動させる。第2の作動ストランド38bは、第1のアンカ本体28bとは別個で、第1のアンカ本体28bに取り付けられることができ、例えば第2のアンカ本体28の開口を通って編まれることができるか、又は第2のアンカ本体28bと一体で、第2のアンカ本体28bの開口を通って延びていることができる。
図2A及び図2Bに示された実施の形態によれば、第1及び第2の作動ストランド38a及び38bは、各々の第1及び第2のアンカ本体28a及び28bと一体である。別の実施の形態によれば、第1及び第2の作動ストランド38a及び38bは、各々の第1及び第2のアンカ本体28a及び28bとは別個であり、各々の第1及び第2のアンカ本体28a及び28bに取り付けられている。さらに別の実施の形態によれば、第1及び第2の作動ストランド38a及び38bのうちの1つは、各々のアンカ本体と一体であり、第1及び第2の作動ストランド38a及び38bのうちの他方は、各々のアンカ本体と別個であり、各々のアンカ本体に取り付けられている。第1及び第2の作動ストランド38a及び38bが各々の第1及び第2のアンカ本体28a及び28bと一体であるものとして例示及び説明されている実施の形態において、第1及び第2の作動ストランド38a及び38bは、これに代えて、そうでないことが示されない限り、各々の第1及び第2のアンカ本体28a及び28bとは別個で、各々の第1及び第2のアンカ本体28a及び28bに取り付けられることができる。さらに、第1及び第2の作動ストランド38a及び38bが各々の第1及び第2のアンカ本体28a及び28bとは別個で、各々の第1及び第2のアンカ本体28a及び28bに取り付けられているものとして例示及び説明されている実施の形態において、第1及び第2の作動ストランド38a及び38bは、これに代えて、そうでないことが示されない限り、各々の第1及び第2のアンカ本体28a及び28bと一体であることができる。
引き続き図2Cを参照すると、アンカアセンブリ20は、アンカ22を接続するよう構成された少なくとも1つのコネクタ部材63を有することができ、アンカ22a及び22bを引き寄せる付勢力がアンカ22a及び22bのうちの少なくとも一方に加えられることを許容することができ、これにより、解剖学的欠陥24を狭める。コネクタ部材63は、第1及び第2のアンカ22a及び22bのうちの一方又は両方と一体である、例えば第1及び第2の作動ストランド38a及び38bと一体であることができるか、第1及び第2のアンカ本体のうちの一方又は両方と一体であることができるか、第1及び第2のアンカ22a及び22bのうちの一方又は両方とは別個で、第1及び第2のアンカ22a及び22bのうちの一方又は両方に(直接的に又は間接的に)取り付けられることができる。例えば、コネクタ部材63は、以下でより詳細に説明するように、第1及び第2のアンカ22a及び22bとは別個で、第1及び第2のアンカ22a及び22bの間に取り付けることができる。コネクタ部材63は、様々な実施の形態にしたがってここに説明されているが、アンカアセンブリ20は、これに代えて、第1のアンカ22aを第2のアンカ22bに取り付けるよう構成されたあらゆる適切なコネクタ部材を有することができる。作動ストランド38a,38bのうちの少なくとも一方又は両方は、接近力AFを受けるよう構成することができ、接近力AFは、間隙24cを狭めるために、第1及び第2のアンカ22a及び22bのうちの少なくとも一方を他方に向かって付勢する。
アンカアセンブリ20は、対応する作動ストランド38a及び38bと一体のコネクタ部材63を有することができる。上述のように、第1及び第2のアンカ本体28a及び28bの各々を、図2Aに示したように間隙24cの互いに反対の側に配置された各々の第1及び第2の目標解剖学的位置24a及び24bにおいて埋め込むことができる。第1及び第2の作動ストランド38a及び38bの各々は、第1及び第2のアンカ本体28a及び28bを各々の第1及び第2の目標解剖学的位置24a及び24bに固定するために、各々の第1及び第2のアンカ本体28a及び28b、特に各々の拡張可能部分36a及び36bを、第1の状態から拡張状態に作動させる作動力Fを、実質的に延在方向34に沿って受けることができる。各作動ストランド38a及び38bに加えられる作動力Fは、互いに異なる作動力の形式であることができるか、又は、以下でより詳細に説明するように、同じ作動力であることができる。
ここで図2Bを参照すると、第1及び第2のアンカ本体28a及び28bが、各々の第1及び第2の目標解剖学的位置24a及び24に固定されると、第1及び第2の作動セグメント38a及び38bのうちの少なくとも一方又は両方に、実質的に、各々の間隙24cに向かう方向であることもできる各々の第1及び第2のアンカ本体28a及び28bの他方に向かう方向に沿って、接近力AFを加えることができる。つまり、接近力AFは、各々の第1及び第2のアンカ本体28a及び28bのうちの他方に向かう方向成分を有することができ、例えば、完全に第1及び第2のアンカ本体28a及び28bのうちの他方に向かって方向付けられることができる。同様に、接近力AFは、間隙24cに向かって方向付けられた、例えば完全に間隙24cに向かって方向付けられた方向成分を有することができる。したがって、接近力AFは、アンカ本体28a及び28bのうちの少なくとも一方又は両方を、アンカ本体28a及び28bのうちの他方に向かって、各々の付勢された位置まで付勢し、間隙24cを狭める。
再び図2Cを参照すると、摺動部材47のうちの少なくとも1つ又は両方を形成することができるコネクタ部材63と、例えば接合部125において、第1及び第2のコネクタ作動ストランド38a及び38bを互いに取り付けるロッキング部材64とが、示されている。つまり、摺動部材47及びロッキング部材64のうちの少なくとも一方は、同様に、第1の作動ストランド38aを第2の作動ストランド38bに取り付けることができることを認識すべきである。1つの実施の形態によれば、間隙24cを狭められた状態に維持するために、第1及び第2の作動ストランド38a及び38bが緊張状態にされた後、コネクタ部材63は第1及び第2の作動ストランド38a及び38bを取り付けることができる。間隙24cを狭められた状態から開放させる第1及び第2のアンカ22a及び22bの分離を防止又は抵抗するために、部材63をロック状態に作動させることができる。これに代えて又はこれに加えて、作動ストランド38a及び38bに接近力AFを加え、作動ストランド38a及び38bを緊張状態に配置する前に、したがって、間隙24cを狭める前に、コネクタ部材63は第1及び第2の作動ストランド38a及び38bを互いに取り付けることができる。
幾つかの実施の形態によれば、コネクタ部材63は、第1及び第2の作動ストランド38a及び38bによって形成されておりかつ第1及び第2の作動ストランド38a及び38bと一体であり、かつ間隙24cを狭めるために作動ストランド38a及び38bのうちの一方を他方に対して摺動させるアンロック状態と、作動ストランド38a及び38bが結び目を通って互いに対して摺動することを防止されるロック状態とを繰り返すことができる摺動及びロッキング結び目として構成することができる。コネクタ部材63は、接合部125において摺動部材47及びロッキング部材64のうちの少なくとも一方を形成する。つまり、コネクタ部材63は、第1及び第2の作動ストランド38a及び38bを互いに直接的又は間接的に取り付けることができると言うことができる。
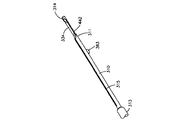
ここで図3Aを参照すると、固定アセンブリ250は、少なくとも1つのアンカ22のようなアンカアセンブリ20と、図1A及び図1Bに例示したようにアンカ22を解剖学的構造24に突入させるよう構成された挿入器具252とを有することができる。固定キット250は、互いに取り付けられた、又はここに記載された実施の形態のいずれかに従って互いに取り付けられるよう構成された、ここに記載されたアンカ22のうちの少なくとも1つから全てまでだけを有することができる。挿入器具252は、中央開口256を備えたカニューレ254と、中央開口256に同軸的に挿入可能なプランジャ又はプッシュロッド258のような第1のプッシャ部材とを有することができる。カニューレ254は、鋭く尖った先端部260と、先端部260から軸方向に延びたスロット268とを有する。カニューレ254は、例示したように実質的に直線的に延びることができるか、湾曲させられているか、又はアンカ本体28を排出するために望みに応じてあらゆる適切な形状を形成することができる。
さらに、挿入器具252は、操作レバー264を備えたハンドル262を有する。ハンドル262の一方の端部は、カニューレ254に取外し可能に取り付けられており、操作レバー264は、プランジャ258に取外し可能に取り付けられている。プランジャ258の外径は、カニューレ254の中央開口256の内径に対応している。後端において、カニューレ254の中央開口は、入口266におけるカニューレ254の後端に向かって拡大するように円錐形に構成されている。つまり、アンカ22のアンカ本体28を、第1の状態において、円錐形の入口266を通ってカニューレ254の中央開口256内に挿入することができ、これにより、アンカ本体28を圧縮することができる。
プランジャ258を前方へ押すことによってアンカ本体28がカニューレ254から押し出されると、アンカ本体28は、例えば第2の方向35(図1A及び図1B)に、半径方向に拡張することができ、アンカ本体28を締め付けるために、作動ストランド38に引張力が加えられると、アンカ本体をカニューレ254の前面によって保持することができる。作動ストランド38はスロット268を通って導かれ、カニューレ254が解剖学的構造24に挿入されると作動ストランド38はカニューレ254と並んで導かれる。作動ストランド38の自由端部にはニードル270が取り付けられており、このニードル270は、アンカ22のアンカ本体28が拡張状態に作動させられ、解剖学的構造24に固定されると、外科的手技を完了するために使用することができる。
図3Bを参照すると、プランジャ258は、カニューレ254の中央開口256の内径若しくは横断面寸法よりも小さな外径若しくは択一的な横断面寸法を有することができる。つまり、プランジャ258がカニューレ254の中央開口256に挿入されると、アンカ22の作動ストランド38を、カニューレ254の中央開口を通って導くことができる。ハンドル262において操作レバー264を作動させることにより、アンカ本体28がカニューレ254の先端部260において中央開口256から出るまで、プランジャ258はアンカ22をカニューレ254において前方へ押し付けることができる。アンカ本体28が中央開口256に位置決めされると、作動ストランド38をカニューレ254の後端において後方へ引っ張ることができ、これにより、アンカ本体28をキャビティ256において拡張状態へ作動させることができる。
図4A〜図4Dを参照すると、プランジャ258は、アンカ22の作動ストランド38を通って導くことができる中央ボア272を形成することができる。さらに、カニューレ254は、カニューレ254の全長に亘ってスロットが形成されるように、カニューレ254の先端部260と後端との間に延びた第1の長手方向開口274を有する。プランジャ258にも全長に亘ってスロットが形成されるように、第2の長手方向開口276がプランジャ258においてプランジャ258の前端と後端との間に延びている。図4Bに示したように、カニューレ254がプランジャ258に対する第1の回転位置に位置すると、カニューレ254の第1の長手方向開口274は、プランジャ258の第2の長手方向開口276とは直径方向で反対側に位置する。カニューレ254の第1の回転位置において、アンカ22の作動ストランド38は中央ボア272によって保持される。アンカ22の作動ストランド38を後方へ引っ張ることによりアンカ22のアンカ本体28が患者の身体の空洞に固定されると、カニューレ254を、プランジャ258に対する第2の回転日へ回転させることができる(図4D)。カニューレ254のこの第2の回転位置において、カニューレ254の第1の長手方向開口274はプランジャ258の第2の長手方向開口276と整合し、挿入器具252をアンカ22の作動ストランド38から解放させることができる。
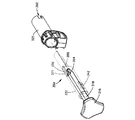
図5A〜図5Dは、ハンドル262と、図3A〜図4Dの挿入器具252の実施の形態のハンドル262へのカニューレ254の取付けとを示している。ハンドル262の上端部は、カニューレ254をハンドル262に解放可能に取り付けるよう構成された解放可能なスナップロックを提供するために、カニューレ254を挿入することができる溝278と、板ばね279のようなばね部材とを有する。プランジャ258の後端部を、操作レバー264の上端部に配置された弾性フォーク280内にスナップ結合させることができる。
図6を参照すると、挿入器具52は、カニューレ254上に滑り被せられる深さ制御チューブ282と、クランピングエレメント284とを有する。挿入器具52は、アンカ22をカニューレ254に挿入しかつプランジャを挿入することによって、操作前に準備される。アンカ22及びプランジャ258が挿入されると、第1のタブ286をカニューレ254の後部にスナップ結合することによって、複数のクランピングエレメント284のうちのいずれか1つが挿入器具252の後端部に取り付けられる。カニューレ254に対するプランジャ258の意図しない移動を防止するために、クランピングエレメント284は、カニューレ254の後端部に当接する第2のタブ288と、プランジャ258の後端部における拡大した部分に当接する第3のタブ290とを有する。挿入器具252を使用する前に、クランピングエレメント284がカニューレ254から取り外され、ハンドル262がカニューレ254に取り付けられ、挿入器具252を、ここに記載した形式で操作することができる。
ここで図1A及び図7A〜図7Dを参照すると、択一的な実施の形態に従って構成された挿入器具300は、第1及び第2のアンカ結び目22a及び22bのような少なくとも1つのアンカ結び目を、目標位置24a及び24b(図1A)のような各々の目標位置へ送り込むよう構成されている。挿入器具300は、実質的に長手方向Lに沿って見た長手方向軸線302に沿って延在するよう例示されており、近位端部304と、長手方向軸線302に沿って近位端部304から間隔を置かれた反対側の遠位端部306とを形成している。つまり、"遠位"及び"近位"という用語及びそれらの派生語は、それぞれ遠位端部306及び近位端部304により近い空間的向きを指すことを認識すべきである。さらに、"下流"及び"上流"という方向を表す用語並びにそれらの派生語は、それぞれ、近位端部304から遠位端部306に向かって延びる方向と、遠位端部306から近位端部304に向かって延びる方向とを指す。挿入器具300は、さらに、実質的に長手方向Lに対して垂直な横方向Aと、実質的に長手方向Lと横方向Aとに対して垂直な横断方向Tとに沿って延びている。横方向及び横断方向A及びTは長手方向軸線302に関して半径方向に延びていると言うこともできる。つまり、"半径方向外方"及び"半径方向内方"という用語並びにそれらの派生語は、それぞれ、長手方向軸線302から離れる方向と、長手方向軸線302に向かう方向とを指し、望みに応じて、横方向及び横断方向と同義で用いることができる。
挿入器具300は、ハンドルを提供することができるケーシング308と、ケーシング308によって支持されかつ中心軸線309に沿ってケーシング308から遠位に延びたカニューレ310とを有する。カニューレ310を、並進に関して、ケーシング308に固定することができる。中心軸線309は、長手方向に延びることができ、つまり、挿入器具300の長手方向軸線302と同一線上であることができるか、又は挿入器具300の長手方向軸線302に関してずれていることができる。カニューレ310は、例示したように実質的に直線的に延びているが、これに代えて、湾曲させられているか又は望みに応じてあらゆる適切な択一的な形状を形成することができる。カニューレ310は、細長い開口312を形成しており、この細長い開口312は、長手方向に、又は望みに応じてあらゆるその他の方向又は方向の組合せに沿って延在することができ、第1及び第2のアンカ結び目22a及び22bのような少なくとも1つのアンカ結び目を収容するよう寸法決めされている。挿入器具300は、さらに、細長い開口312に配置されたプラグ314のような付勢部材を有することができ、これにより、第1の結び目アンカ本体28aはプラグ314の上流の位置においてカニューレ310に配置され、第2の結び目アンカ28bはプラグ314の下流の位置においてカニューレ310に配置される。つまり、プラグ314は、さらに、長手方向に沿って第1のアンカ本体28aを第2のアンカ本体28bから分離させるディバイダを提供することができる。第1及び第2のアンカ本体28a及び28bは、長手方向軸線302に沿って器具300に積層されている。少なくとも1つのアンカを目標位置に送り込むために、カニューレ310は、目標位置において組織を突き刺すよう構成された遠位先端部311を形成している。
挿入器具300は、さらに、ケーシング308によって支持され、ケーシング308から近位に延びたプランジャ316を有する。プランジャ316は、図7A〜図7Dに示された初期位置若しくは第1の位置から、遠位に、第1のストロークに沿って、図8A〜図8Dに示された第2の位置まで並進するよう構成されており、これにより、プラグ314が第2のアンカ22bを遠位に付勢し、第2のアンカ22bを、カニューレ310から、例えば先端部311を通って実質的に長手方向に延びた遠位排出ポート442から排出する。
第2のアンカ22bが排出ポート442から排出されると、プランジャ316は、図11A〜図11Cに示された第2のストロークの第1の部分に沿って、及び図12A〜図12Cに示された第2のストロークの第2の部分に沿って、さらに遠位に並進するよう構成されており、これにより、プッシュロッド330(図7C)は第1のアンカ本体28aを遠位に付勢し、第1のアンカ22aをカニューレ310から、例えば排出ポート442から第1の目標解剖学的位置22aへ排出する。これに代えて、以下でより詳細に説明するように、カニューレ310は、第1及び第2のアンカ本体28a及び28bを、カニューレ310から、中心軸線309に対して角度方向にずれた方向に沿って排出するよう構成された側部排出ポート318(図31に関連して以下で説明される)を形成することができる。
挿入器具300は、プランジャ316が、中間ストロークに沿ってオフセット位置から図10A〜図10Dに示された中間位置まで移動する前に、第2の位置から、図9A〜図9Dに示されたオフセット位置まで遠位に移動するように、構成することができる。したがって、プランジャ316は、第1の位置から、オフセット位置へ、中間位置へ、最終的に図12A〜図12Dに示された第3の位置へ移動することができる。例示された実施の形態によれば、プランジャ316は、第2のストロークに沿って第3の位置へ移動する前に、第2の位置から中間位置へ回転させられる。例えば、プランジャ316は、図12A〜図12Dに示された第2のストロークの第2の部分に沿って移動する前に、図11A〜図11Dに示された第2のストロークの第1の部分に沿って移動することができる。作動力を、各アンカが排出された後に第1及び第2のアンカ22a及び22bの作動部分311a及び131bにそれぞれ加えることができるか、これに代えて、両アンカ22a及び22bが排出された後に加えることができる。アンカ22a及び22bを、望みに応じてあらゆる形式で、例えば間隙24cを跨いで互いに取り付けることができる。
ここで特に図7A〜図7Cを参照すると、ケーシング308は、本体320を形成しており、この本体320は、あらゆる寸法及び形状であることができる複数の接合された壁部のような、少なくとも1つの半径方向外側の側壁322を形成しており、さらに、近位壁部324と、反対側の遠位壁部326とを形成している。少なくとも1つの外壁322と、近位壁部324と、遠位壁部326とは、カニューレ310の細長い開口312と流体接続(流体が通過できるような接続)することができる内部328を少なくとも部分的に形成している。カニューレ310は、ケーシング308の遠位壁部326に取り付けられており、これにより、ケーシング308に固定されている。カニューレ310は、ケーシング308から遠位に先端部311まで延びている。カニューレ310がテーパした遠位端部を形成するように、先端部311は遠位にテーパしていることができる。例えば、先端部311は円錐形であることができ、つまり、先端部311は、円錐形の部分を形成することができ、円錐の形状、又は望みに応じてあらゆる適切な択一的な形状を形成することができる。挿入器具300は、さらに支持スリーブ313を有することができ、この支持スリーブ313は、ケーシング308との境界面においてカニューレ310を少なくとも部分的に包囲しており、かつカニューレ310の長さの一部に沿って遠位に延びている。支持スリーブ313は、カニューレ310に対して構造的支持及び剛性を提供する。
プランジャ316は、内部328に配置された遠位端部316aと、遠位端部316aから近位に延びてケーシング308の近位壁部324から出た本体部分316bと、ケーシング308の外側に配置されたグリップを形成することができる近位端部316cとを形成している。挿入器具300は、さらに、第1のプッシャアセンブリ317を有する。第1のプッシャアセンブリ317は、プランジャ316と、プランジャ316の遠位端部316aに直接的に又は間接的に取り付けられたプッシュロッド330のような第1のプッシャ部材とを有することができる。プッシャロッド330は、プランジャ316に取り付けられていることができる(例えば、プランジャ316と一体であるか、又は望みに応じてあらゆる適切なファスナ又は中間装置を介してプランジャ316に別個に取り付けられている)。例えば、例示された実施の形態によれば、プランジャの遠位端部316aは、図17に関連して以下でより詳細に説明されるように、保持ハウジング392に取り付けられている。プッシュロッド330は、保持ハウジング392に取り付けられており、これにより、プランジャ316に取り付けられている。プッシュロッド330は、プランジャ316から遠位にカニューレ310の開口312内へ延び、ケーシング308の遠位壁部326から出ることができる。プランジャ316及びプッシュロッド330のうちの少なくとも一方又は両方への言及は、第1のプッシャアセンブリ317に適用可能であることが認識されるべきである。例えば、プランジャ316及びプッシュロッド330のうちの少なくとも一方又は両方に固定又は結合された構造に関する記述は、それぞれ、第1のプッシャ317に固定又は結合されていると言うことができる。
プッシュロッド330はプランジャ316に並進可能に固定されているので、近位及び遠位へのプランジャ316の移動は、プッシュロッド330を同様に近位及び遠位に移動させる。プッシュロッド330は、カニューレ310の開口312に配置された遠位端部330aを形成している。したがって、挿入器具300が図7A〜図7Dに示したような第1の位置にある時には、プッシュロッド330の遠位端部330aは第1のアンカ22aに対して支持されるよう構成されている。挿入器具300が第1の位置にある時に、プランジャ316、ひいてはプッシュロッド330が第1の位置から第2の位置へ遠位に並進し、これにより、プッシュロッド330が第1のアンカ22aを挿入器具300から各々の目標位置24aへ排出する際にも、プッシュロッド330の遠位端部330aは、第1のアンカ22aに対して支持されるよう構成されている。第1のアンカ本体28aが排出され、解剖学的構造24に対して支持された後に、実質的にアンカ本体28aの延在方向に沿って各々の作動部材37aに引張力が加えられると、アンカ本体28aは、アンカ本体28aの延在方向に対して垂直な第2の方向35に沿って拡張する(例えば図1A及び図1B参照)。
挿入器具300は、さらに、プランジャ316の周囲の延びたカラー332のような取付け部材331を有しかつプランジャ316を少なくとも部分的に包囲することができる第2のプッシャアセンブリ333と、カラー332から遠位に延びておりかつプッシュロッド330を少なくとも部分的に包囲したプッシュチューブ334のような第2のプッシャ部材とを有することができる。プッシュチューブ334をカラー332に取り付けることができる(例えば、カラー332と一体であるか、望みに応じてあらゆる適切なファスナを介してカラー332に別個に取り付けられている)。したがって、プッシュチューブ及びカラー332の少なくとも一方又は両方の説明は、第2のプッシャアセンブリ333に適用可能である。例えば、プッシュチューブ334及びカラー332のうちの少なくとも一方又は両方に固定又は結合された構造に関する説明は、それぞれ、第2のプッシャアセンブリ333に固定又は結合されているということができる。
プッシュチューブ334は、プッシュチューブ334の遠位端部を形成することができるプラグ314を有することができる。プッシュチューブ334は、長手方向に細長い開口335を形成するために、例示した実施の形態によれば、カニューレを有することができ、プッシュロッド330がプッシュチューブ334の細長い開口335の内部に配置されるように、プッシュロッド330は、開口335の外径よりも小さな外径を有する。直径を形成するものとしてここに記載された構造は、これに代えて、円形であるか又は択一的に成形されることができる、あらゆる適切に構成された横断面を形成することができ、これにより、直径であるか又はそうでないことができるあらゆる横断面寸法を形成することができる。カニューレ310は、第1及び第2のアンカ本体28a及び28bの両方を収容することができる。例えば、プッシュチューブ334は、プラグ314の上流の位置において第1のアンカ本体28aを収容することができ、カニューレ310は、プラグ314の遠位、つまり第1のアンカ本体28aの遠位の位置において第2のアンカ本体28bを収容することができる。
本発明は、カラー332の遠位端部から半径方向内方へ延びることができる力伝達部材336を有することができ、これにより、プッシュロッド330が力伝達部材336を通って又は力伝達部材336から遠位に延びている。力伝達部材336はカラー332に当接することができるか、又はカラー332の遠位端部に固定することができる。力伝達部材336は、さらに、プッシュチューブ334の近位端部に当接するか又は固定することができる。力伝達部材336がカラー332及びプッシュチューブ334のうちの一方又は両方に当接するならば、(1)カラー332の遠位への移動が力伝達部材336を遠位に付勢し、これが次いでプラグ314を含むプッシュチューブ334を遠位に付勢し、(2)カラー332の近位への移動はプッシュチューブ334を近位に付勢しない。力伝達部材336がカラー332及びプッシュチューブ334に取り付けられているならば、(1)カラー332の遠位への移動は力伝達部材336を遠位へ付勢し、これは次いでプラグ314を含むプッシュチューブ334を遠位に付勢し、(2)カラー332の近位への移動が力伝達部材を遠位に付勢し、これは次いでプラグ314を含むプッシュチューブ334を遠位に付勢する。力伝達部材336がカラー332及びプッシュチューブ334に当接するか又は固定されているかに応じて、カラー332はプッシュチューブ334に並進可能に結合されており、これにより、カラー332の遠位への並進がプッシュチューブ334を遠位に並進させると言うことができる。
カラー332,ひいてはプラグ314を含むプッシュチューブ334は、並進に関して、選択的に、第1のプッシャアセンブリ317に結合されかつ第1のプッシャアセンブリ317から解離させられるよう構成されており、かつ並進に関して、選択的にケーシング308に結合されかつケーシング308から解離させられるよう構成されている。例えば、第1の状態において、カラー332は、プランジャ316、ひいてはプッシュロッド330にも並進可能に固定されている。さらに、第1の状態において、カラー332は、ケーシング308から並進可能に解離させられており、ひいてはカニューレ310からも並進可能に解離させられている。したがって、第1の状態において、ケーシング308及びカニューレ310に対するプランジャ316及びプッシュロッド330の近位及び遠位への移動は、カラー332を、対応して、ケーシング308及びカニューレ310に対して近位及び遠位へ移動させる。以下でより詳細に説明するように、第1の状態において、プッシュロッド330はプッシュチューブ334に並進可能に結合されており、これにより、プッシュロッド330及びプッシュチューブ334は、例えば第1のストロークの間、直列で並進し、これにより、プッシュチューブ334が第2のアンカ本体28bをカニューレ310から排出させるということを認識すべきである。上述のように、第2のアンカ本体28bが排出された後に実質的に第2のアンカ本体28bの延在方向に沿って各々の作動部材37bに引張力が加えられると、第2のアンカ本体28bは、アンカ本体28bの延在方向34に対して垂直な第2の方向35に沿って拡張する(例えば図1A及び図1B参照)。
第2の状態において、カラー332は、プランジャ316、ひいてはプッシュロッド330から並進可能に切断されており、ケーシング308、ひいてはカニューレ310に並進可能に結合されている。したがって、第2の状態において、プランジャ316及びプッシュロッド330は、カラー332、ケーシング308及びカニューレ310に対して近位及び遠位に移動する。以下でより詳細に説明するように、第2の状態において、第1のストロークの後、プッシュロッド330はプッシュチューブ334から並進可能に解離させられており、これにより、プッシュロッド330は、例えば第2のストロークの少なくとも一部の間、プッシュチューブ334、ひいてはプラグ314に対して遠位に並進し、これにより、プッシュロッド330が第1のアンカ本体28aをカニューレ310から排出させる。
ここで図13A〜図13Bを参照すると、挿入器具300は、ケーシング308とプッシュロッド330との相対移動を案内するためにケーシング308とプッシュチューブ334とを作用的に結合するガイドシステム329を有する。例示した実施の形態によれば、ガイドシステム329は、ケーシング308とカラー332との間に結合された相補的な第1及び第2のガイド部材338をそれぞれ有する。例示した実施の形態によれば、第1のストロークと、第2のストロークの第1の部分との間、第1及び第2のガイド部材338及び340は、ケーシング308に対するプランジャ316(及びプッシュロッド330)及びカラー332(及びプッシュチューブ334)の直列の移動を案内するために協働する。これに関して、第1のストロークと、第2のストロークの第1の部分との間、第1及び第2のガイド部材338及び340がプランジャ316とカラー332との間に作用的に結合されているということを認識すべきである。例示した実施の形態によれば、第2のストロークの第2の部分の間、第1及び第2のガイド部材338及び340は、カラー332(及びプッシュチューブ334)及びケーシング308の両方に対するプランジャ316及びプッシュロッド330の移動を案内するために協働する。これに関して、第1及び第2のガイド部材338及び340は、第2のストロークの第2の部分の間、ケーシング308及びカラー332の間に作用的に結合されていることを認識すべきである。
例示した実施の形態において、第1及び第2のガイド部材338及び340のうちの一方は、カラー332及びケーシング308のうちの一方の内部へ延びたガイド軌道342として提供されており、ガイド部材338及び340のうちの他方は、ガイド軌道342内へ延びたガイドピン344として提供されており、これにより、ガイドピン344はガイド軌道342に収容され、これにより、カラー332をケーシング308に作用的に結合している。例示した実施の形態によれば、第1のガイド部材338は、カラー332によって支持されかつ形成されたガイド軌道342として提供されており、第2のガイド部材340は、ケーシング308に並進可能に固定されかつガイド軌道342内へ延びたガイドピン344として提供されている。例えば、ガイドピン344は、ケーシング308の側壁322内へ又はこれを貫通して、ガイド軌道342内へ半径方向に延びている。択一的な実施の形態によれば、ガイド軌道342をケーシング308によって支持及び形成することができ、ガイドピン344をカラー332に並進可能に固定することができる。
図13Gに示された実施の形態によれば、軌道342は、カラー332内へ、しかしカラー332を貫通することなく延びたスロット339と、スロット339の半径方向内側の端部に配置された、カラー332の基部341とを形成している。ガイド軌道342は、第1の軌道部分342aのような第1のガイド部分と、第1の軌道部分342aに対して、例えば半径方向にずれた第2の軌道部分342bのような第2のガイド部分と、第1の軌道部分342aを第2の軌道部分342bに接続した、角度づけられた中間軌道部分342cのような、角度づけられた中間ガイド部分とを形成している。したがって、ガイドピン344は、第1のストロークの間、プランジャ316が第1の位置から第2の位置へ並進させられる際に、第1の軌道部分342aに沿って移動するよう構成されている。特に、第2の軌道部分342aは、第1の若しくは遠位端部342a′と、反対側の、第2の若しくは近位端部342a′′と、遠位端部342a′と近位端部342a′′との間のオフセット位置342a′′′とを形成している。オフセット位置342a′′′は、第1の軌道部分342aと第2の軌道部分342bとの間に延びた中間軌道部分342cと整合させられている。ガイドピン344が近位端部342a′′からオフセット位置342a′′′へ並進させられると、ガイドピン344は、プランジャ316が中間位置へ回転させられる際に、中間軌道部分342cに沿って第2の軌道部分342bに向かって移動することができる。ガイドピン344は、その後、プランジャ316がさらに第3の位置に向かって並進させられる際に、第2の軌道部分342bに沿って遠位に移動することができる。
第1及び第2のガイド軌道部分342a及び342bは実質的に長手方向に延びており、第1のストロークの間のケーシング308に対するカラー332の遠位への並進は、ガイドピン344及びガイド軌道342を互いに対して並進させるようになっている。図13A及び図13Bに示された例示された実施の形態によれば、ガイド軌道342はガイドピン344に関して遠位に並進し、これにより、プランジャ316及びカラー332の第1のストロークの間に、ガイドピン344を第1のガイド軌道部分342aに沿って近位に並進させる。第1のストロークが完了すると、第2のアンカ本体28bはカニューレ310から排出され、ガイドピン344は、第1の軌道部分342aの近位端部342a′′に配置される。カラー332は、第1の軌道部分342aの近位端部に停止部材を形成している。つまり、ガイドピン344はカラー332と干渉し、これにより、プランジャ316及びカラー332がケーシング308に対して遠位にさらに並進することを防止する。したがって、使用者が、第2のアンカ本体28bが排出された後にプランジャ316の継続した遠位への並進によって第1のアンカ本体308aを誤って排出することが防止される。
第1のストロークの間、ガイドピン344は、遠位位置342a′(図13Aに示されている)から、オフセット位置342a′′′(図13Cに示されている)を通過し、近位端部342a′′(図13Bに示されている)まで並進する。ガイドピン344がオフセット位置342a′′′にあるとき、プッシュチューブ334は、遠位排出ポート442(図9D参照)に対して近位に僅かに凹まされている。ガイドピン344が近位端部342a′′へ移動する際、プッシュチューブ334は排出ポート442(図8D参照)に対して遠位に並進する。図8A及び図9Aにさらに示されているように、挿入器具300は、コイルばねであることができるばね部材365を有し、このばね部材365は、例えばケーシング308の遠位壁部326においてケーシング308に固定されるばね座381と、力伝達部材336との間に延びている。つまり、ばね部材365は、ケーシング308と第2のプッシャアセンブリ333との間に作用的に結合されている。第2のプッシャアッセンブリ333が並進に関して第1のプッシャアセンブリ317に結合されている時、ばね部材365は、ケーシング308と第1のプッシャアセンブリ317との間に作用的に結合されている。
ばね部材365は、プランジャ316が第1のストロークに沿って遠位に並進する際に、カラー332、ひいてはプランジャ316を近位に付勢する力を提供する。したがって、図13B及び図13Cを参照すると、ガイドピン344が第1の軌道部分342aの近位端部342a′′における第2の位置になると、ばね力はカラー332を付勢して移動させ、ガイドピン344が第1の軌道部分342aの近位端部342a′′から第1の軌道部分342a遠位端部342aに向かって遠位に並進する。しかしながら、以下でより詳細に説明するように、軌道342は、オフセット位置342a′′′から遠位の方向に沿ったガイドピン344の移動を妨害する基部341を有する。ガイドピン344がオフセット位置342a′′′にある時には、プッシュチューブ334のプラグ314は、遠位排出ポート442(図9D参照)に対して近位に凹まされているか、又は実質的に遠位排出ポート442と整合させられており、プラグ314は遠位排出ポート442を超えて遠位に延びないようになっている。
ここで図13C及び図13Dを参照すると、プランジャ316が中間ストロークに沿って移動する際に、プランジャ316を矢印Aの方向に沿って回転させることができる。挿入器具300は、プランジャ316及びカラー332を回転可能に結合するキー318を形成している。例示した実施の形態によれば、キー318は、プランジャ316がカラー332に対して回転することを防止する、プランジャ316及びカラー332の相補的な平坦な面として提供されている。その結果、矢印Aの方向に沿ったプランジャ316の回転は、カラー332を同様に矢印Aの方向に沿って回転させる。したがって、第1のストロークが完了すると、プランジャ316の回転は、ガイドピン344を、中間ストロークに沿って第1の軌道部分342aから、中間軌道部分342cに沿って、第2の軌道部分342bの遠位端部まで移動させる。ここで図13D及び図13Eを参照すると、ガイドピン344が第2の軌道部分342bに配置されると、第2のストロークの第1の部分に沿ったプランジャ316及びカラー332のさらなる並進は、ガイドピン344が第2の軌道部分342bの近位端部まで移動するまで、ガイドピン344をケーシング308に対して遠位に並進させる。カラー332は、第2の軌道部分342bの近位端部に停止部材を形成しており、この停止部材は、カラー332がケーシング208に対して遠位に移動しつづけることを防止する。カラー332は、第1及び第2の軌道部分342a及び342bの末端部において停止部材を形成していると言うことができる。
ここで図13E及び図13Fを参照すると、以下でより詳細に説明するように、ガイドピン344が第2の軌道部分342bの近位端部まで移動すると、第2のストロークの第2の部分に沿ったプランジャ316のさらなる遠位の並進はカラー332から切断され、プランジャ316及びプッシュロッド330が、カラー332、プッシュチューブ334及びケーシング308に対して並進する。プランジャ316は、プランジャの遠位端部316cがケーシング308に、例えば近位壁部324において当接するまで、第2のストロークの第2の部分の間にカラー332及びケーシング308に対して遠位に並進するよう構成されており、これにより、図12A〜図12Cに示したように、第2のストロークを完了させかつ第2のアンカ本体28bをカニューレから排出する。
ここで特に図13Gを参照すると、軌道342の基部341は、第1の軌道部分342aにおいて第1の基部部分341aを、第2の軌道部分342bにおいて第2の基部部分341bを、中間軌道部分342cにおいて中間基部部分341cを形成している。基部341は、他よりも深い部分を有し、これにより、ガイドピン344が軌道に沿って移動する際、聴覚及び触覚のフィードバックのうちの少なくとも一方又は両方を、使用者によって検知することができ、これにより、カラー332、幾つかの例においてはプランジャ316が、ストローク又はストロークの一部を完了したことを示すようになっている。基部341は、さらに、ガイドピン344が軌道342の部分に沿って近位に移動することを防止するストッパを提供することができる。例えば、第1の基部部分341aは、第1の若しくは遠位の第1の基部部分341a′と、遠位の第1の基部部分341a′よりも深い第2の若しくは近位の第1の基部部分341a′′とを形成している。第1の基部部分341aは、近位の第1の基部部分341a′と遠位の第1の基部部分341a′′との間に配置されたエッジ346aを形成している。エッジ346aは、半径方向に、若しくは長手方向軸線302に向かって延びる半径方向成分を有する方向に沿って、延びていることができる。
ガイドピン344は、ポスト344aと、ばね部材345とを形成することができ、ばね部材345は、ケーシング308とポスト344aとの間に結合されており、ポスト344aを軌道342内へ及び基部341に対して付勢する。つまり、カラー332及びプランジャ316が第1のストロークに沿って移動する時にガイドピン344が第1の軌道部分342aに対して近位に移動する際、ガイドピン344の遠位部分344bは、ガイドピン344が近位の第1の基部部分341a′′まで移動する際、遠位の第1の基部部分341a′に沿って、エッジ346aを超えて移動する。ガイドピン344がエッジ346aを超えて移動し、ばね部材345のばね力によって軌道341に対して付勢される際、プランジャ316及びカラー332が第1のストロークを完了したという、触覚及び聴覚のフィードバックのうちの少なくとも一方を、使用者に伝達することができる。エッジ346aを、第1の軌道部分のオフセット位置342a′′′に配置することができ、これにより、ガイドピン344が第1の基部部分341aに沿って第1の軌道部分342aの近位端部342a′′まで移動すると、エッジ346aは、ばね部材365の力が、ガイドピン344を、第1の軌道部分342aのオフセット位置342a′′′に対して近位に並進させることを防止する。むしろ、ガイドピン344はエッジ346aに当接するので、ばね部材365の付勢力は、ガイドピン344を、中間軌道部分342cと整合させ、中間ストロークに沿って移動又は回転させられる位置にもたらす。
引き続き図13Gを参照すると、中間基部部分341cは、第1の若しくは近位の中間基部部分341c′と、近位の中間基部部分341c′よりも深い第2の若しくは遠位の中間基部部分341c′′とを形成している。遠位の中間基部部分341c′′を第2の基部部分341bと整合させることができる。中間基部部分341c′′は、近位の中間基部部分341c′と遠位の中間基部部分341c′′との間に配置されたエッジ346cを形成している。これに代えて、中間基部部分341cは、遠位部分を有さないことができ、これにより、エッジ346cは中間基部部分341cと第2の基部部分341bとの間に配置される。エッジ346cは、半径方向に、若しくは長手方向軸線302に向かって延びる半径方向成分を有する方向に沿って延びることができる。ガイドピン344の遠位部分344bが、中間ストロークと第2のストロークとの間の移行中にエッジ346cを超えて移動し、第2の軌道部分342bと整合させられる際、プランジャ316及びカラー332が中間ストロークを完了し、第2のストロークの第1の部分に沿って移動させられるための位置にあるという、触覚及び聴覚のフィードバックのうちの少なくとも一方を、使用者に伝達することができる。さらに、ガイドピン344が第2の軌道部分342bに位置決めされると、エッジ346bは、プランジャ316が矢印A(図13C)の方向とは反対の方向に沿って回転させられることを防止する。
第2の基部部分341bは、第1の若しくは近位の第2の基部部分341b′と、近位の第2の基部部分341b′よりも深い第2の若しくは遠位の第2の基部部分341b′′とを形成している。遠位の第2の基部部分341b′′を、第2の軌道部分342bの末端遠位端部に配置することができる。第2の基部部分341bは、近位の第2の基部部分341b′と遠位の第2の基部部分341b′′との間に配置されたエッジ346bを形成している。エッジ346bは、半径方向に、若しくは長手方向軸線302に向かって延びる半径方向成分を有する方向に沿って延びることができる。ガイドピン344の遠位部分344bがエッジ346bを超えて移動する際、プランジャ316及びカラー332が第2のストロークの第1の部分を完了したという、触覚及び聴覚のフィードバックのうちの少なくとも一方を使用者に伝達することができる。フィードバックは、プランジャ316がカラー332から解離させられており、かつ以下に説明するようにカラー332から独立して第2のストロークの第2の部分に沿って並進することができることを示すことができる。さらに、プランジャ316及びカラー332が解離させられると、エッジ346bはガイドピン344が第2の軌道部分342bに沿って近位に移動することを防止する。
ここで図7及び図14A〜図14Dを参照すると、挿入器具300は、第1の作動モードと第2の作動モードとの間で反復するよう構成されたカップリングアセンブリ350を有する。第1の作動モードにおいて、カップリングアセンブリ350は、プッシュロッド330として示された第1のプッシャ部材と、プッシュチューブ334として示された第2のプッシャ部材とを、第1のストロークの間の並進に関して、並進可能に固定する。第1の作動モードにおいて、カップリングアセンブリ350は、プッシュロッド330をプッシュチューブ334に解放可能に並進可能に固定し、これにより、第2の作動モードにおいて、カップリングアセンブリ350は、プッシュロッド330をプッシュチューブ334から解離させ、これにより、第1のストロークの後、例えば第2のストロークの間、プッシュロッド330はプッシュチューブ334に対して遠位に並進することができる。さらに、第2の作動モードにおいて、カップリングアセンブリ350は、プッシュチューブ334をケーシング308に並進可能に固定することができ、これにより、プランジャ316に加えられる遠位の並進力は、プランジャ316、ひいてはプッシュロッド330を、プッシュチューブ334、ひいてはカラー332に対して遠位に並進させる。例示した実施の形態によれば、カップリングアセンブリ350は、第1のプッシャアセンブリ317の第1のストローク、第1のプッシャアセンブリ317の中間ストローク、及び第1のプッシャアセンブリ317の第2のストロークの第1の部分の間、第1の作動モードにある。例示した実施の形態によれば、カップリングアセンブリ350は、第1のプッシャアセンブリ317が第2のストロークの第1の部分と第2のストロークの第2の部分との間で移動する際に、第2の作動モードへ移行する。例示した実施の形態によれば、第1のプッシャアセンブリ317が第2のストロークの第1の部分と第2のストロークの第2の部分とに沿って並進する時、カップリングアセンブリ350は第2の作動モードにある。
例示した実施の形態によれば、カップリングアセンブリ350は、プランジャ316のような第1のプッシャアセンブリ317内へ半径方向に延びた第1の凹所354として例示された少なくとも1つの第1のカップリング部材352を有することができる。例示した実施の形態によれば、カップリングアセンブリ350は、さらに、カラー332のような第2のプッシャアセンブリ333を半径方向に貫通して延びたチャネル358として例示された少なくとも1つの第2のカップリング部材356を有することができる。カップリングアセンブリ350は、さらに、ケーシング308によって支持された第2の凹所362として例示された少なくとも1つの第3のカップリング部材360を有することができる。例えば、挿入器具300は、ケーシング308によって、例えばケーシング308の近位壁部324によって支持された内側ハウジング325を有することができる。例示した実施の形態によれば、第2の凹所362は半径方向外方に内側ハウジング325内へ延びている。これに代えて、第2の凹所362は、半径方向外方にケーシング308内へ延びることができる。
さらに、例示した実施の形態によれば、プランジャ316が、図7C及び図14Bに示された第1の位置にあるとき、第2の凹所362は、チャネル358に関して遠位に配置される。プランジャ316が、図7A及び図13Aに示された第1の位置にあるとき、第2の凹所362は、さらに、チャネル358に関して半径方向にずれていることができる。これに代えて、第2の凹所362は、第2の凹所362に関して半径方向で整合させられることができ(例えば軌道342が中間軌道部分342cを有さないならば)、さらに択一的に、望まれるならばケーシング308の半径方向内側の面を包囲するように環状であることができる。
カップリングアセンブリ350は、さらに、第1の凹所354及び第2の凹所362のそれぞれに部分的に嵌合するよう寸法決めされたラッチ370として例示された少なくとも1つの第4のカップリング部材368を有することができる。例示した実施の形態によれば、ラッチ370は、カラー332によって支持されており、板ばね371を形成するためにカラー332の実質的にU字形の開口又は切欠きとして提供することができる、チャネル358に配置された板ばね371として構成されている。板ばね371は、プランジャ316の第1の凹所に嵌合するよう寸法決めされた半径方向内向きの突出部373を有する。ラッチ370は、さらに、チャネル358に配置されるよう寸法決めすることができ、半径方向で内方及び外方へフレキシブルである。したがって、ラッチ370は、チャネル358に沿って第1の凹所354(図14B)と第2の凹所362(図14D)との間を移動することができる。
例示した実施の形態によれば、ガイドピン344が第1の軌道部分342aにあるときには、カップリングアセンブリ350は第1の作動モードにあり、ガイドピン344が第1の軌道部分342aから中間軌道部分342cまで移動するときには、第1の作動モードにとどまり、ガイドピン344が第2の軌道部分342bの部分に沿って移動するときには、さらに第1の作動モードにとどまる。特に、第1の凹所354及びチャネル358、並びにラッチ370の突出部371は、例示したように第1の軌道部分342a、中間軌道部分342c及び第2の軌道部分342bの部分のうちのいずれか及び全ての内部へ延びているときに半径方向で整合させられるように位置決めすることができる。
したがって、第1の作動モードにおいて、ラッチ370は、部分的にプランジャ316の第1の凹所354に配置され、カラー332のチャネル358内へ延びている。ラッチ突出部373は、第1の凹所354に捕捉されるように、並進移動に関してプランジャ316をカラー332に結合するように、寸法決めすることができる。その結果、ラッチ370がプランジャ316に結合されているとき、プランジャ316及びカラー332、ひいては第1及び第2のプッシャアセンブリ317及び333は、長手方向に沿った移動又は並進に関して結合されている。
ここで図14C及び図14Dを参照すると、例示した実施の形態によれば第2の凹所362はラッチ370を収容するよう寸法決めされているので、ラッチ370が第1の凹所354から第2の凹所362内へ移動するとき、ラッチ370は第1のプッシャアセンブリ317を第2のプッシャアセンブリ333から解離させ、第2のプッシャアセンブリ333、特にカラー332を、少なくとも並進に関してケーシング308に結合し、回転に関してカラー332をケーシング308にも結合することができる。上述のように、ケーシング308は、少なくとも並進に関してカニューレ310に固定されており、さらに、並進に関してカニューレ310に固定することができる。例示した実施の形態によれば、ガイドピン344が中間軌道部分342c(図13C及び図13D)に沿って移動するようにプランジャ316が第2の位置から中間位置へ回転させられるとき、第1の凹所354及びチャネル358は、第2の凹所362と長手方向で整合させられる。
第2のストロークの第1の部分の間(図13E参照)、プランジャ316及びカラー332は、第1の凹所354及びチャネル358がケーシング308の第2の凹所362と整合させられるまで、長手方向に並進する。第2のストロークの第1及び第2の部分の間の移行の間(図13Fも参照)、ラッチ370は、第1の凹所352から外れるように駆動され(例えばカム)、これにより、図14C及び図14Dに示したように、第1の凹所352から第2の凹所362内へ移動する。択一的な実施の形態によれば、プランジャ316は、ラッチ370を第1の凹所352から第2の凹所362内へ半径方向外方に付勢するばね部材を有することができる。さらに択一的に、プランジャ316及びカラー332がケーシング308の第2の凹所362を超えて回転するときにラッチ370が第1の凹所352から外れ、第1の凹所から第2の凹所362内へ移動することができるように、挿入器具300を構成することができる。カラー332に取り付けられたまま、ラッチ370が第1の凹所354から第2の凹所362内へ移動すると、プランジャ316は、第2のストロークの第2の部分の間(図13F参照)カラー332に対して遠位に並進し続けることができ、これは、プッシュロッド330をプッシュチューブ334に対して遠位に並進させる。
ここで、まず図7A〜図7D、図13A、及び図14A〜図14Dを参照して、挿入器具300の操作を説明する。特に、挿入器具300は、プランジャ316、ひいてはプッシュロッド330が第1の位置にあるときに、第1及び第2のアンカ本体28a及び28bがカニューレ310に配置されるように、構成することができる。例示した実施の形態によれば、第1のアンカ本体28aは、排出ポート442と、プッシュチューブ334のプラグ314との間に長手方向に配置されている。プランジャ316及びプッシュロッド330を含む第1のプッシャアセンブリ317と、カラー332及びプッシュチューブ334を含む第2のプッシャアセンブリ333とが、第1の位置にあるとき、カップリングアセンブリは、長手方向移動及び回転運動に関して、第1のプッシャアセンブリ317と第2のプッシャアセンブリ333とを解放可能に結合している。特に、ラッチ370は、第1の凹所354及びチャネル358に延びており、これにより、長手方向移動及び回転運動に関して、プランジャ316とカラー332とを解放可能に結合している。
ここで、特に図8A〜図8D、図13A及び図13B、図14Bを参照すると、先端部311を、解剖学的構造24内へ、例えば第2の目標解剖学的位置24bにおいて、排出ポート442の(遠位部分のような)少なくとも一部が解剖学的構造24の遠位、若しくは背後に延びるまで、噴射することができる。例示した実施の形態によれば、挿入器具は、深さストッパ383を有することができ、この深さストッパ383は、カニューレ310から半径方向に延びており、解剖学的構造24に当接するよう構成されており、カニューレ310が所望の深さまで噴射されると、例えば排出ポート442が解剖学的構造24の背後に配置されるように、解剖学的構造24へのカニューレ310のさらなる挿入に対する抵抗を提供する。これに関して、深さストッパ383は、カニューレ310が目標構造24内へ所望の深さまで噴射されたという触覚のフィードバックを使用者に提供することができる。ケーシングが定置のままプランジャ316に遠位の力が加えられると、例えば使用者が、プランジャ316に遠位の力を加えながらケーシング308を相対的に定置に掴むと、第1及び第2のプッシャアセンブリ317及び333は、第1のストロークに沿ってケーシング308に対して遠位に並進する。第1及び第2のプッシャアセンブリ317及び333がケーシング308に対して遠位に移動する際、ガイドピン344は、ガイドピン344が第1の軌道部分342aの近位端部342a′′に到達するまで、カラー332の第1の軌道部分342aに沿って近位に移動する。第2のプッシャアセンブリ333が遠位に移動する際、プラグ314は第2のアンカ本体28bを付勢し、先端部311に向かって遠位に並進させる。さらに、第1のプッシャアセンブリ317は、ケーシング308に対して、ひいてはカニューレ310に対しても、第2のプッシャアセンブリ333とともに遠位に並進するので、プッシャロッド330は、第1のストロークの間に第1のアンカ本体28aを下流へ先端部311に向かって付勢する。
ガイドピン344が第1のガイド軌道部分342aの近位端部342a′′に到達すると、プラグ314は、排出ポート442の近位端部に対して遠位に並進しており、これにより、第2のアンカ本体28bを排出ポート442から解剖学的構造24の背後の位置へ、例えば矢印Bの方向に沿って第2の目標解剖学的位置24b(図1A参照)において付勢する。つまり、第1の軌道部分342aは、第1の軌道部分342aに沿ったガイドピン344の移動によりプッシュチューブ334が第2のアンカ本体28bを挿入器具300から排出するような十分な長手方向長さを有する。プランジャ316及びカラー332が第1のストロークを完了すると、プランジャ314は先端部311から近位に間隔を置かれることができる。カラー332は、第1の軌道部分342aの近位端部342a′′にストッパを形成しており、このストッパは、図14Cに関して上述したように、ラッチ370がケーシング308に結合される前に、カラー332の、ひいてはプッシュチューブ334及びプッシュロッド330のさらなる遠位への並進を防止する。
次いで、図9A〜図9Dを参照すると、第2のアンカ本体28bが挿入器具300から排出されると、プランジャ316から遠位の力を除去することができ、これにより、ばね部材365が、第2のプッシャアセンブリ333、例えばカラー332、及びひいては第1のプッシャアセンブリ317をも、上述のように、ガイドピン344が第1の軌道部分342aのオフセット位置342a′′′と整合させられるまで、近位に付勢する。ガイドピンがオフセット位置342a′′′にあると、ガイドピン344は中間軌道部分342cと整合させられ、プランジャ316を第2の軌道部分342bに対して回転させることができる。
第1のストロークの完了後でかつ第1のアンカ本体28aの排出前のいかなる時点においても、第2のアンカ本体28bを、図1Bに示した拡張状態に作動させることができる。例えば、図9Eを参照すると、挿入器具を目標解剖学的位置24から取り外すことによって第2のアンカ本体28bを作動させることができる。図9Bに示したように、及び図9Bに関して以下でより詳細に説明するように、挿入器具300は、第1及び第2のアンカ本体28a及び28bの作動部分131a及び131bに作用的に接続され、かつケーシング308の内部328へ近位に延びかつ保持アセンブリ390に解放可能に結合された少なくとも1つのテンショニングストランド380を保持する、例えば解放可能に保持する、ストランド保持アセンブリ390を有する。テンショニングストランド380に張力が加えられた時、例えば解剖学的構造24から挿入器具300を近位に取り外す時、幾つかの実施の形態において、解剖学的構造24からの取外し後に挿入器具310をさらに近位に並進させる時、テンショニングストランド380が作動ストランド131bに張力を伝達し、これにより、第2のアンカ本体28bを拡張状態に作動させるように、少なくとも1つのテンショニングストランド380を寸法決めしかつ作動ストランド131に沿って位置決めすることができる。さらに択一的に、使用者は、望みに応じて各々の作動部分131bに作動力を手動で加えることができる。挿入器具300は、さらに、排出ポート442に対して近位の位置においてカニューレ310の1つの半径方向側部を貫通した細長い側部スロット315を形成することができる。作動ストランド131a,131b及び取付け部分133がスロット315を通って延びることができ、かつケーシング308内へ近位に延びたテンショニングストランド380に取り付けられることができるように、スロット315は、排出ポート442から近位に十分な距離だけ延びていることができ、かつ十分に寸法決めされていることができる。これに代えて、少なくとも1つのテンショニングストランド380は、カニューレ310の内部で作動部分131a,131bに取り付けられることができ、かつスロット315から延びていることができる。つまり、スロット315は、作動ストランド38a,38b及び少なくとも1つのテンショニングストランド380の太さよりも大きいが、アンカ本体28a及び28bがカニューレ310内の各々の第1の状態にある時のアンカ本体28a及び28bの太さよりも小さい周方向幅を形成することができる。
ここで図10A〜図10D、図13C〜図13D及び図14A〜図14Dを参照すると、第2のアンカ本体28bが排出されかつガイドピン344が第1の軌道部分342aのオフセット位置342a′′′になると、挿入器具300は解剖学的構造24から取り出されており、挿入器具300の先端部311を、第2の目標解剖学的位置24bに関して上述した形式で、第1の目標解剖学的位置24aにおいて解剖学的構造24内へ噴射することができる。中間ストロークに沿って移動するために先端部311が第1の目標解剖学的位置24aにおいて噴射される前又はその後に、プランジャ316を矢印Aの方向に沿って回転させることができ、これは、ガイドピン344を中間軌道部分342aに沿って第2の軌道部分342bに向かって並進させる。プランジャ316が中間位置になるまでプランジャ316を矢印Aの方向に沿って回転させることができ、これにより、ガイドピン344は第2の軌道部分342bと長手方向で整合させられる。プランジャ316及びカラー332が中間位置へ回転させられると、プランジャ316及びカラー332は再びケーシング308に関して遠位に並進することができ、ラッチ370は第2の凹所362と長手方向で整合させられる。
ここで図11A〜図11D、図13D〜図13E及び図14Dを参照すると、中間ストロークに沿ってプランジャ316を駆動する前に挿入器具300が第1の目標解剖学的位置24aへ噴射されていないならば、中間ストロークに沿って移動するようにプランジャ316を駆動した後、ただし第2のストロークに沿って並進するようにプランジャ316を駆動する前に、挿入器具300を第1の目標解剖学的位置24aへ噴射することができる。プランジャ316及びカラー332がケーシング308に関して遠位へさらに駆動される際、第1及び第2のプッシャアセンブリ317及び333は、第2のストロークの第1の位置に沿ってケーシング308に関して遠位に並進する。第2のストロークの第1の部分に沿ったプランジャ316の並進は、ガイドピン344を、中間部分から、第2の軌道部分342bの近位端部と遠位端部との間の位置まで近位に並進させる。
プランジャ316がケーシング308に関して遠位に並進する際、カップリングアセンブリ350は、第1の凹所354が半径方向で第2の凹所362と整合させられるまで、カラー332、ひいてはプラグ314を含むプッシュチューブ334を対応してケーシング及びカニューレ310に対して遠位に並進させる。つまり、第2の軌道部分342bに沿ったガイドピン344の移動はラッチ370を第2の凹所362と整合するよう移動させると言うことができる。プラグ314が、先端部311に対して遠位の位置、つまり排出ポート442に対して遠位の位置へ並進させられると、ラッチ370が半径方向で第2の凹所362と整合させられるように、第2の凹所362を位置決めすることができ、これは、第2のストロークの第1の部分に沿ってプランジャ316が並進すると生じることができる。プラグ314は排出ポート442の遠位に並進しているので、第1のアンカ本体28aがカニューレ310から排出される際、プラグ314は、第1のアンカ本体28aとの干渉から外される。さらに、プッシュロッド330及びプッシュチューブ334は第2のストロークの第1の部分に沿って一緒に並進するので、プッシュロッド330は、第1のアンカ本体28bをカニューレ310の細長い開口312において下流に先端部331に向かって付勢し続ける。第1及び第2の凹所354及び362が、第2のストロークの第1及び第2の部分の間の移行部において半径方向で整合させられる際、ラッチ370が第1の凹所354から第2の凹所362内へ駆動される。
ここで図12A〜図12D、図13E〜図13F、及び図14Dを参照すると、ラッチ370が第2の凹所352に配置されると、第2のプッシャアセンブリ333は、並進に関してケーシング308に結合される。ラッチ370が第1の凹所354から外されるので、第1のプッシャアセンブリ317は、並進に関して第2のプッシャアセンブリ333から解離させられる。したがって、第1のプッシャアセンブリ317は、第2のプッシャアセンブリ333及びケーシング308に関して、ひいてはカニューレ310に関しても並進することができる。つまり、ラッチ370は、第1のアンカ本体28aを挿入器具330から排出するためにプッシュロッド330がプッシュチューブ344から独立して並進可能であるように、プッシュロッド330とプッシュチューブ334とを並進可能に解離させるために第2の凹所362内へ移動する、と言うことができる。
例示した実施の形態によれば、第2のストロークの第2の部分の間に第1のプッシャアセンブリ317が第2のプッシャアセンブリ333に関してさらに遠位に付勢される際、プランジャ316及びプッシュロッド330は、ケーシング308、ひいてはカニューレ310にも関して遠位に並進する。その結果、プッシュロッド330は、例えば遠位端部において、プラグ314に対して遠位に移動するように第1のアンカ本体28aを付勢する。プラグ314は、近位端部において斜面376を形成していることができる。斜面376は、つまり、排出ポート442の遠位に配置することができ、長手方向軸線302に沿って位置決めすることができ、ひいては、プッシュロッド330が長手方向に沿って並進しかつ第1のアンカ本体28aをカニューレ310から長手方向に沿って排出する際に、第1のアンカ本体28aと整合させられることができる。斜面376は、遠位に延びながら半径方向外方へ角度づけられたテーパした排出面378を形成していることができる。したがって、プッシャロッド330がプラグ314に対して並進しながら、プッシャロッド330が、排出ポート442から遠位に排出面378へ並進するように第1のアンカ本体28aを付勢する際、第1のアンカ本体28aは排出面378に沿って乗り上げ、排出面378は、第1のアンカ本体28aを挿入器具300から離れるように第1の目標解剖学的位置24aに方向付ける。つまり、第2の軌道部分342bは、プラグ314を先端部311の遠位の位置へ並進させるための長手方向長さを有し、これにより、プッシュロッド330の遠位の並進は、第1のアンカ本体28aを挿入器具から排出させる。
カップリングアセンブリ350は、カラー332がプランジャ316によって第1のストロークに沿って移動し、プランジャ316によって中間ストロークに沿って移動し、プランジャ316によって第2のストロークの第1の部分に沿って移動するよう構成されているが、択一的な実施の形態によれば、第1のストロークの後又は第1のストロークの間、又は中間ストロークの後又は中間ストロークの間、カラー332がプランジャ316から並進可能に解離させられるように、カップリングアセンブリ350を構成することができることを認識すべきである。
ここで図12Eを参照すると、第1のアンカ本体28aが、解剖学的構造24の背後の位置において第1の目標位置24aへ排出されると、第1のアンカ本体28aを拡張状態に作動させることができる。例えば、第1のアンカ本体28aは、使用者が作動力F(図1A)を各々の作動部分131aに加えることによって手作業で拡張させることができる。例示した実施の形態によれば、第1及び第2のアンカ本体28a及び28bの作動ストランド38a及び38bはそれぞれ、共通のストランドであることができる。したがって、作動部分131aは作動部分131bと一体であり、例えば解剖学的構造24からの挿入器具300の取外し時の挿入器具300の近位の並進により、挿入器具300は近位の引張力をテンショニングストランド380に加えることができ、これは、引張力を第2のアンカ本体28bに伝達し、これにより、第2のアンカ本体28bを拡張状態に作動させる。
ここで図15A〜図15Eを参照すると、カップリングアセンブリ350は、別の実施の形態に従って構成することができ、例示した実施の形態によれば、プランジャ316のような第1のプッシャアセンブリ317内へ半径方向に延びた第1の凹所354として例示された少なくとも1つの第1のカップリング部材352を有することができる。カップリングアセンブリ350は、さらに、例示した実施の形態によれば、カラー332のような第2のプッシャアセンブリ333を通って半径方向に延びたチャネル358として例示された少なくとも1つの第2のカップリング部材356を有することができる。カップリングアセンブリ350は、さらに、例示した実施の形態によればケーシング308内へ半径方向外方に延びた、第2の凹所362(図15C)として例示された少なくとも1つの第3のカップリング部材360を有することができる。さらに、例示した実施の形態によれば、プランジャ316が図7A及び図13Aに示された第1の位置にある時、第2の凹所362はチャネル358に関して遠位に配置されている。第2の凹所362は、さらに、プランジャ316が図7A及び図13Aに示された第1の位置にある時、チャネル358に関して半径方向にずれていることができる。これに代えて、第2の凹所362は、(例えば軌道342が中間軌道部分342cを有さないならば)第2の凹所362に関して半径方向で整合させられることができ、さらに択一的に、望まれるならばケーシング308の半径方向内側の面を包囲するように環状であることができる。
カップリングアセンブリ350は、さらに、第1の凹所354及び第2の凹所362の各々に部分的に嵌合するよう寸法決めされたラッチ370として例示された少なくとも1つの第4のカップリング部材368を有することができる。例示した実施の形態において、ラッチ370は実質的に球形であり、第1の凹所354及び第2の凹所362の各々は実質的に部分的に球形であることができるが、ラッチ370と、第1の凹所354及び第2の凹所362の各々とは、望みに応じてあらゆる適切な形状を形成していることができる。ラッチ370は、さらに、チャネル358に配置されるよう寸法決めされることができ、チャネル358は、実質的にラッチ370の長手方向寸法と等しい長手方向寸法によって形成され、さらに実質的にラッチ370の半径方向寸法と等しい半径方向寸法によって形成されたスロットの形態であることができる。したがって、ラッチ370は、第1の凹所354(図15A及び図15B)と、第2の凹所362(図15D及び図15E)との間でチャネル358に沿って移動することができる。
例示した実施の形態によれば、カップリングアセンブリ350は、ガイドピン344が第1の軌道部分342aにある時に第1の作動モードになり、ガイドピン344が第1の軌道部分342aから中間軌道部分342cへ移動する時に第1の作動モードにとどまり、さらに、ガイドピン344が第2の軌道部分342bの一部に沿って移動する時に第1の作動モードにとどまる。特に、第1の凹所354及び358は、例示したように、第1の軌道部分342a、中間軌道部分342c、及び第2の軌道部分342bの一部のうちのいずれか及び全て内へガイドピン344が延びている時に半径方向で整合させられるように位置決めすることができる。さらに、ラッチ370は、組み合わされたチャネル358及び第2の凹所362の半径方向寸法と実質的に等しい、組み合わされた第1の凹所354及びチャネル358の半径方向寸法と実質的に等しい半径方向寸法を形成している。つまり、ラッチ370の半径方向寸法は、組み合わされたチャネル358及び第2の凹所362の半径方向寸法とも実質的に等しい、したがって、第1の凹所354及び第2の凹所362は実質的に同じ半径方向寸法を形成していることができることも認識すべきである。
したがって、第1の作動モードにおいて、ラッチ370は、プランジャ316の第1の凹所354に部分的に配置されており、カラー332のチャネル358内へ延びている。ラッチ370は、ケーシング308とプランジャ316との間に捕捉されるよう、またチャネル358においてカラー332を貫通するよう、寸法決めすることができる。第1の凹所354は、長手方向及び周方向で実質的にラッチ370の一部と等しく成形されているので、プランジャ316の長手方向及び回転方向の移動は、対応して、ラッチ370が第1の凹所354に配置されている時にはプランジャ316と共に、ラッチ370をそれぞれ長手方向及び回転方向に移動させる。さらに、チャネル358は、長手方向及び周方向の両方においてラッチ370の寸法と実質的に等しく寸法決めされているので、ラッチ370の長手方向及び回転方向の移動は、対応して、カラー332をそれぞれ長手方向及び回転方向に移動させる。その結果、ラッチ370が第1の凹所354及びチャネル358に配置されている時、プランジャ316及びカラー332、ひいては第1及び第2のプッシャアセンブリ317及び333は、長手方向に沿って移動又は並進に関して結合され、さらに、半径方向での回転又は移動に関して結合される。
ここで図15C〜図15Eを参照すると、第2の凹所362は、例示した実施の形態によればラッチ370の一部と実質的に等しく成形されているので、ラッチ370が第1の凹所354から第2の凹所362内へ移動する時、ラッチ370が第1のプッシャアセンブリ317を第2のプッシャアセンブリ333から解離させ、少なくとも並進に関して、第2のプッシャアセンブリ333、特にカラー332をケーシング308に結合し、回転に関してもカラー332をケーシング308に結合することができる。上述のように、ケーシング308は、少なくとも並進に関してカニューレ310に固定されており、さらに並進に関してカニューレ310に固定することができる。例示した実施の形態によれば、ガイドピン344が中間軌道部分342c(図13C及び図13D)に沿って移動するようにプランジャ316が第2の位置から中間位置へ回転させられた時、第1の凹所354及びチャネル358は、第2の凹所362と長手方向で整合させられる。
第2のストロークの第1の部分の間(図13E参照)、プランジャ316及びカラー332は、第1の凹所354及びチャネル358がケーシング308の第2の凹所362と整合させられるまで長手方向に並進する。第2のストロークの第1及び第2の部分の間の移行中(図13Fも参照)、ラッチ370は、第1の凹所352から駆動され(例えばカム移動させられ)、ひいては、第1の凹所352から第2の凹所362内へ移動する。択一的な実施の形態によれば、プランジャ316は、第1の凹所352から第2の凹所362内へ半径方向外方へラッチ370を付勢するばね部材を有することができる。さらに択一的に、プランジャ316及びカラー332がケーシング308の第2の凹所362を超えて並進する際にラッチ370が第1の凹所352からカム移動し、第1の凹所から第2の凹所362内へ移動することができるように、挿入器具300を構成することができる。カラー332のチャネル358に配置されたままラッチ370が第1の凹所354から第2の凹所362内へ移動させられると、第2のストロークの第2の部分の間(図13F参照)、プランジャ316はカラー332に対して遠位に並進し続けることができ、これは、プッシュロッド330をプッシュチューブ334に対して遠位に並進させる。
ここで図16A〜図17Dを参照すると、アンカアセンブリ20は、第1及び第2のアンカ本体28a及び28bの第1及び第2の作動ストランド38a及び38bをそれぞれ通って縫い込むことができるテンショニングストランド380のような少なくとも1つのテンショニング部材を有することができる。アンカアセンブリ20は、第1及び第2の作動ストランド38a及び38bのうちの一方又は両方を貫通した、望まれる数のテンショニングストランドを有することができる。テンショニングストランド380は、第1の端部380′と、第2の端部380′′と、第1及び第2の端部380′,380′′の間に延びた中間部分380′′′とを形成している。
テンショニングストランド380を、アンカ本体28a及び28bのうちの少なくとも一方の第1の作動ストランドを通って縫うことができる。例示した実施の形態によれば、テンショニングストランド380は、第1の作動ストランドを通って、特に第1のアンカ本体28aの第1の作動部分131a及び第1の取付け部分133aを通って縫われている。例えば、テンショニングストランド380を作動ストランド38aに挿入するために、第1のテンショニングストランド380aを、第1の作動ストランド38aを通って駆動されるニードルに通すことができ、これにより、テンショニングストランド380は、第2のアンカ本体28bよりも第1のアンカ本体28aに近い位置において作動ストランド38aに接続される。
ここで図7C及び図17A〜図17Dを参照すると、挿入器具300は、少なくとも1つのテンショニングストランド380、特にテンショニングストランド380の第1及び第2の端部380a′及び380′′を保持するよう構成されたストランド保持アセンブリ390のような保持アセンブリを有することができる。1つの実施の形態によれば、保持アセンブリはテンショニングストランド380を解放可能に保持する。以下で説明するように、保持アセンブリ390は第1のプッシャアセンブリ317に並進可能に固定されており、これにより、プランジャ316と共に長手方向Lに沿って近位及び遠位に移動する。したがって、テンショニングストランド308は、各々の目標解剖学的位置24a及び24bにおける第1及び第2のアンカ本体28a及び28bの埋込みのために十分なたわみを提供する。第2のアンカ本体28bがカニューレ310から排出された後、例えば解剖学的構造24から器具を取り出す時の挿入器具300の近位への移動は、保持アセンブリ390を近位方向へ移動させ、これにより、第2のテンショニングストランド380に引張作動力を加え、第2のテンショニングストランド380は作動力を第2の作動ストランド38bの第2の作動部分131bに伝達し、第2のアンカ本体28bを拡張させる。同様に、第1のアンカ本体28aがカニューレ310から排出された後、例えば解剖学的構造24から器具を取り出す時の挿入器具300の近位への移動は、保持アセンブリ390を近位方向へ移動させ、これにより、テンショニングストランド380に引張作動力を加え、第1の作動ストランド38aの第1の作動部分131aに作動力を伝達し、第1のアンカ本体28aを拡張させる。
保持アセンブリ390は、例示した実施の形態によりプランジャ316の遠位端部316aに結合された、プランジャ316によって直接的に又は間接的に支持されたハウジング本体394を有する保持ハウジング392を有する。ハウジング本体394は、さらに、保持アセンブリ390から遠位に延びたプッシュロッド330に結合されている。保持ハウジング392は、ハウジング本体394の互いに反対側の端部、例えば横方向で互いに反対側の端部から延びた、第1のロッキング部材400及び第2のロッキング部材402を有する。第1及び第2のロッキング部材400及び402は、テンショニングストランド380の各々の第1及び第2の互いに反対側の端部380′及び380′′を保持するよう構成されている。第1のロッキング部材400は、第1の端部380′を開放するために解離させられるよう構成されている。第2のロッキング部材402は、第1のロッキング部材400が開放された時にテンショニングストランド380の第2の端部380′′を保持するよう構成されている。
例示した実施の形態によれば、第1のロッキング部材400は、ロッキング本体407と、ロッキング本体407に取外し可能に固定されるよう構成されたクリップ409とを有する。例えば、クリップ409は、ロッキング本体407に枢動可能に取り付けることができるか、又はさもなければ望みに応じてロッキング本体407に可動に取り付けることができる。保持ハウジング392は、ロッキング本体407とクリップ409との間に配置された保持チャネル411を形成することができる。保持チャネル411は、望みに応じてあらゆる適切な形状を有することができ、例示した実施の形態によれば蛇行形状を形成している。クリップ409がロッキング本体407に固定されている時、保持チャネル411は、テンショニングストランド380の第1の端部380′の太さよりも小さな厚さを有する。クリップ409は、クリップ409をロッキング本体407から解放するための解放力を受けるよう構成された外方へ突出した解放タブ413を有し、これにより、以下でより詳細に説明するように、保持アセンブリ39から保持ストランド380の第1の端部380′を自由にする。
例示した実施の形態によれば、第2のロッキング部材402は、第2のロッキング本体415と、第2のロッキング本体415に固定されるよう構成された第2のクリップ417とを有する。保持ハウジング392は、第2のロッキング本体415と第2のクリップ417との間に配置された第2の保持チャネル419を形成していることができる。第2の保持チャネル419は、望みに応じてあらゆる適切な形状を有することができ、例示した実施の形態によれば蛇行形状を形成している。第2のクリップ417が第2のロッキング本体415に固定されている時、第2の保持チャネル419は、テンショニングストランド380の第2の端部380′′の太さよりも小さな厚さを有する。
つまり、作動中、テンショニングストランド380の第1の端部380′は、第1の保持チャネル411を貫通していることができ、クリップ409をロッキング本体407に固定することができ、これにより、テンショニングストランド380の第1の端部380′を第1のロッキング部材400に解放可能にロックする。同様に、テンショニングストランド380の第2の端部380′′は、第2の保持チャネル419を貫通していることができ、第2のクリップ417を第2のロッキング本体415に固定することができ、これにより、テンショニングストランド380の第2の端部380′′を第2のロッキング部材402に解放可能にロックする。第1及び第2の端部380a′及び380′′が保持アセンブリに固定されている時、第1及び第2のアンカ28a及び28bが埋め込まれてこれにより引張作動力をテンショニングストランド380に伝達するようになると、挿入器具は近位に並進することができ、これは、引張作動力をアンカ本体の各々の作動部分に伝達し、これにより、アンカ本体を上述の形式で拡張させる。
保持アセンブリ490はさらに、第1のロッキング部材400を解放するよう構成されたアクチュエータアセンブリ421を有する。特に、アクチュエータアセンブリ421は、ケーシング308(図7C)によって支持されたアクチュエータ又はボタン423と、ボタン423からケーシング308の内部328へ延びた一対のアーム425のような少なくとも1つの付勢部材とを有することができる。プランジャ316が第2のストロークを完了すると第1のアンカ本体28aは器具300から排出されたことが認識される。したがって、アクチュエータアセンブリ421は、プランジャ316が第2のストロークの端部に到達するとアームが保持ハウジング492に接触するように位置決めされている。
図12C及び図17Cを参照すると、プランジャ316が第2のストロークの端部に到達する際、アーム425が、第1及び第2のロッキング本体407及び415それぞれの外面に沿って乗り上げ、これは、ボタン423を半径方向外方へアンロード位置からロード位置に持ち上げる。プランジャ316が第2のストロークの端部に到達すると、アームのうちの一方が開放タブ413と整合させられる。したがって、ボタン423を押し下げることができ、これにより、アーム425のうちの一方が開放タブ413を第1のロッキング本体407から離れるように駆動し、これにより、クリップ409をアンロック位置へ移動させ、この場合、クリップ409は、ロッキング本体407から、保持チャネル411がテンショニングストランド380の第1の端部380′よりも広くなるように十分な量だけ取り外される。その結果、第1の端部380′は保持アセンブリ390からアンロックされ、アンカ本体の作動ストランドを通ってテンショニングストランド380を引っ張るために、器具を近位に移動させることができる。
ここで図18Aを参照すると、アンカアセンブリ20は、択一的に、第1及び第2のアンカ本体28a及び28bの第1及び第2の作動ストランド38a及び38bそれぞれを通って縫うことができる第1のテンショニングストランド380a及び第2のテンショニングストランド380bのような一対のテンショニング部材を有することができる。アンカアセンブリ20は、第1及び第2の作動ストランド38a及び38bのうちの一方又は両方を貫通した、望みに応じた数のテンショニングストランドを有することができる。第1のテンショニングストランド380aは、第1の端部380′と、第2の端部380′′と、第及び第2の端部380′及び380′′の間に延びた中間部分380′′′とを形成している。同様に、第2のテンショニングストランド380bは、第1の端部380′と、第2の端部380′′と、第1及び第2の端部380a′及び380′′の間に延びた中間部分380b′′′とを形成している。
第1のテンショニングストランド380aは、第1の作動ストランド38aを通って、例えば第1の作動ストランド38aの互いに反対側の端部を通って縫うことができる。例えば、第1のテンショニングストランド380aは、第1のテンショニングストランド380aを第1の作動ストランド38aに挿入するために、第1の作動ストランド38aを通って駆動されるニードルに引き通されることができる。第1のテンショニングストランド380aは、第1の作動ストランド38aの第1の取付け部分133a及び第1の作動部分131aを通って延びることができ、第1及び第2のアンカ本体28a及び28bの間の位置において、第1の作動部分131a及び第1の取付け部分133aを通って、戻るようにループになることができる。
同様に、第2のテンショニングストランド380bを、第2の作動ストランド38b、例えば第2の作動ストランド38bの互いに反対側の端部に縫い通すことができる。例えば、第2の作動ストランド38bに第2のテンショニングストランド380bを挿入するために第2の作動ストランド38bを通って駆動されるニードルに第2のテンショニングストランド380bを引き通すことができる。第2のテンショニングストランド380bは、第2の作動ストランド38bの第1の取付け部分133b及び作動部分131bを通って延びることができ、第1及び第2のアンカ本体28a及び28bの間の位置において第2の取付け部分133b及び第2の作動部分131bを通って、戻るようにループになることができる。
ここで図19A及び図19Bを参照すると、少なくとも1つのテンショニングストランド380を解放可能に保持するために、ストランド保持アセンブリ390を択一的な実施の形態により構成することができる。つまり、図19A及び図19Bに示されたストランド保持アセンブリ390は、第1及び第2のテンショニングストランド380a及び380bの対を保持するものとして示されているが、保持アセンブリ390は、択一的に、例えば図16及び図17に関して上述したように、1つのテンショニングストランドを解放可能に保持することができる。図19A及び19Bに示した実施の形態によれば、保持アセンブリ390は、第1及び第2のテンショニングストランド380a及び380bの第1及び第2の端部380a′及び380′′及び380b′及び380b′′を保持する。1つの実施の形態によれば、保持アセンブリ390は、第1及び第2のテンショニングストランド380a及び380bを解放可能に保持する。以下に説明するように、保持アセンブリ390は、第1のプッシャアセンブリ317に並進可能に固定されており、これにより、プランジャ316と一緒に長手方向Lに沿って近位及び遠位に移動する。したがって、第2のアンカ本体28bがカニューレ310から排出されると、近位方向へのプランジャ316及びプッシュロッド330の移動は保持アセンブリ390を近位方向に移動させ、これにより、引張作動力を第2のテンショニングストランド380bに加え、第2のテンショニングストランド380bは、作動力を第2の作動ストランド38bの第2の作動部分131bに伝達し、第2のアンカ本体28bを拡張させる。同様に、第1のアンカ本体28aがカニューレ310から排出された後、近位方向へのプランジャ316及びプッシュロッド330の移動は保持アセンブリ390を近位方向へ移動させ、これにより、引張作動力を第1のテンショニングストランド380aに加え、第1のテンショニングストランド380aは、作動力を第1の作動ストランド38aの第1の作動部分131aに伝達し、第1のアンカ本体28aを拡張させる。
保持アセンブリ390は、ケーシング308によって直接的に又は間接的に支持されたハウジング本体394を有する保持ハウジング392を有する。例示した実施の形態によれば、保持ハウジング392はケーシング308の内部328に配置されているが、これに代えて、保持ハウジング392を、ケーシング308の外部に支持することができ、望みに応じて挿入器具300のプランジャ316又はあらゆる適切な択一的な構造に取り付けることができる。保持ハウジング392は、近位方向に沿ってハウジング本体394内へ長手方向に延びたボア396を形成している。例示した実施の形態によれば、ボア396はハウジング本体394を通って長手方向に延びている。ハウジング本体394は、ボア396の周縁を形成する少なくとも1つの内面398を形成することができる。内面398は、ハウジング本体394の遠位端部からハウジング本体394の近位端部までの方向に沿って近位に移動する際に半径方向外方へ(例えば直線的に、曲線的に、又はあらゆる適切な択一的な形状に沿って)傾斜することができる。つまり、ボア396は、前端若しくは近位端部における実質的に長手方向軸線302に対して垂直な方向に沿った第1の横断面寸法D3と、第2の端部若しくは遠位端部における長手方向軸線302に対して実質的に垂直な方向に沿った第2の横断面寸法D4とを形成することができる。ボア396をテーパさせることができるので、第1の横断面寸法D3は第2の横断面寸法D4よりも小さくなっていることができる。ボア396を、例えば直線的、曲線的又は望みに応じてあらゆる適切な択一的な形状に沿ってテーパさせることができる。
保持アセンブリ390は、さらに、ボア396の内部に配置された第1のロッキング部材400を有することができる。第1のロッキング部材400は、第1の横断面寸法D3と第2の横断面寸法D4との間の、例えば長手方向軸線302に対して実質的に垂直な方向に沿った、横断面寸法D5を有する。第1のロッキング部材400は、例示したように実質的に球形であることができるか、又はこれに代えて望みに応じたあらゆる形状を形成していることができる。保持アセンブリ390は、ロッキング部材400とハウジング本体394の内面398との間に少なくとも1つのストランドを保持するよう構成されている。例えば、テンショニングストランド380a′及び380b′のうちの少なくとも一方又は両方の第1の端部は、第1のロッキング部材400と内面398との間に延びていることができる。第1のロッキング部材400は、器具の操作中に内面398に対して支持されるよう構成されており、これにより、第1の端部380a′及び380b′を第1のロッキング部材400とハウジング本体394の内面398との間に捕捉し、第1の端部380a′及び380b′の各々と保持ハウジング392との間の相対移動を防止する。つまり、第1のロッキング部材400は第1のロッキング面を有することができ、内面398は、保持アセンブリ390において第1及び第2のテンショニングストランド380a及び380bの第1の端部380a′及び380b′を保持するために第1のロッキング面と協働する第2のロッキング面を有することができる。
保持アセンブリ390は、さらに、第1のロッキング部材400に取り付けられるよう構成された第2のロッキング部材402を有することができる。特に、第2のロッキング部材402は、ハウジング本体394の近位端部に螺合しながら挿入されるねじ山付プラグ403を有することができる。したがって、第2のロッキング部材402は、テーパした内面398に隣接して配置することができ、テーパしたボア396の近位端部を閉鎖することができる。これに代えて、第2のロッキング部材402は、ハウジング本体394と一体であることができる。第2のロッキング部材402は、第1のロッキング部材400とハウジング本体394の内面398との間に捕捉されたテンショニングストランドの端部とは反対側の、1つ以上のテンショニングストランドの端部を収容するよう構成された、長手方向開口404のような少なくとも1つの開口を形成している。したがって、第2のロッキング部材402は、第1及び第2のテンショニングストランド380a及び380bの第2の端部380a′′及び380b′′の各々を収容するよう構成されている。第2のロッキング部材402は、つまり、テーパしたボア396と整合させることができ、これにより、第1及び第2のストランド380a及び380bの各々の第2の端部380a′′及び380b′′は、テーパしたボア396を通って延び、第2のロッキング部材402に取り付けられる。
例示した実施の形態によれば、長手方向開口404は、ケーシング308の内部328であることができる、ボア396とプラグ403の外部との間に長手方向に延びている。第2の端部380a′′及び380b′′の各々又は両方を、長手方向開口404の近位端部において結び目406に結ぶことができ、これにより、結び目406は第2のロッキング部材402の近位端部に当接する。つまり、保持アセンブリ390は、第1のテンショニングストランド380aの第1及び第2の端部380a′及び380a′′を固定するよう構成されており、さらに、第2のテンショニングストランド380bの第1及び第2の端部380b′及び380b′′を固定するよう構成されている。第2の端部380a′′及び380b′′は、択一的に又は付加的に、第1のロッキング部材400と内面398との間に延びていることができ、第2の端部380a′′及び380b′′を保持アセンブリ390に保持するために望みに応じて第1のロッキング部材400と内面398との間に捕捉することができる。第2のロッキング部材402は、さらに、長手方向開口404から間隔を置かれた第2の長手方向開口405を有することができる。第2の長手方向開口405は、第1のロッキング部材400と内面398との間に捕捉された第1の端部380a′及び380b′の残りを収容するよう構成されている。
図19Cを参照すると、第1のプッシャアセンブリ317は、フランジ319の間に延びた間隙321を形成するためにプランジャ316から突出した一対のフランジ319を有することができる。間隙321はハウジング本体394を収容するよう寸法決めすることができ、これにより、フランジ319の各々はハウジング本体394の近位端部及び遠位端部にそれぞれ当接する。したがって、プランジャ316の近位移動により、フランジ319のうちの遠位のフランジは、ハウジング本体394、ひいては保持アセンブリ390を付勢し、プランジャ316と共に、ひいてはプッシュロッド330と共に近位に移動させる。同様に、プランジャ316の遠位移動により、フランジ319のうちの近位のフランジは、ハウジング本体394、ひいては保持アセンブリ390を付勢し、プランジャ316と共に、ひいてはプッシュロッド330と共に遠位に移動させる。
操作中、プランジャ316及びプッシュロッド330は第1のストローク及び第2のストロークに沿って直列で遠位に移動し、かつ第1及び第2のアンカ本体28a及び28bはプッシュロッド330と共に遠位に移動するので、保持アセンブリ390は、同様に第1及び第2のアンカ本体28a及び28bと共に遠位に移動する。したがって、保持アセンブリ390は、第1及び第2のアンカ本体28a及び28bがカニューレ310から排出される前に、第1及び第2のテンショニングストランド380a及び380bのうちのいずれか、ひいては各々の第1及び第2の作動ストランド38a及び38bに張力を生ぜしめないように働くことができる。しかしながら、以下で説明するように、挿入器具300、特にプランジャ316を、第1及び第2のアンカ本体がカニューレ310から排出された後に第1及び第2のアンカ本体28a及び28bに各々の第1及び第2の作動力を加えるように作動させることができる。
例えば、ここで図8A〜図8D、図19A及び図19Bを参照すると、プランジャ316が第1のストロークに沿って移動し、これにより、解剖学的構造24の背後の位置と、第2の解剖学的位置24bとにおいて第2の骨アンカ28bをカニューレ310から排出すると、ガイドピン344が、第1の軌道部分342aの遠位端部における停止面を提供しこれによりプランジャのさらなる近位の並進を防止するカラー332に接触するまで、遠位方向に沿って第1の軌道部分342aに沿って乗るように、プランジャ316を近位に並進させることができる。解剖学的構造24と第2のアンカ本体28bとの接触は、第2のアンカ本体28bが保持アセンブリ390と共に近位に並進することを防止するので、保持アセンブリはテンショニングストランド380bに引張力を加え、この引張力は、作動力として第2の作動ストランド38bに伝達され、この作動力は、第2のアンカ本体28bを、図9Aに示された第1の状態から、図9Eに示された拡張状態へ移動させる。
例えば、ここで図9A〜図9E、図19A及び図19Bを参照すると、プランジャ316が第1のストロークに沿って移動し、これにより、第2の解剖学的位置24bにおける解剖学的構造の背後の位置において第2の骨アンカ28bをカニューレ310から排出すると、挿入器具300を、上述のように解剖学的組織24から取り出されながら、近位に並進させることができる。解剖学的構造24と第2のアンカ本体28bとの接触は第2のアンカ本体28bが挿入器具300と共に近位に並進することを防止するので、保持アセンブリ390は、テンショニングストランド380bに引張力を加え、この引張力は、作動力として第2の作動ストランド38bに伝達され、この作動力は第2のアンカ本体28bを、図9Aに示された第1の状態から、図9Eに示された拡張状態へ移動させる。
同様に、ここで図18A〜図18E、図19A及び図19Bを参照すると、プランジャ316が第2のストロークの第2の部分に沿って移動し、これにより、第1の解剖学的位置24aにおける解剖学的組織24の背後の位置において第1の骨アンカ28aをカニューレ310から排出すると、挿入器具300を、解剖学的組織24から取り出されながら、近位に並進させることができる。解剖学的構造24と第1のアンカ本体28aとの接触は第1のアンカ本体28aが保持アセンブリ390と共に近位に並進することを防止するので、保持アセンブリ390は、第1のテンショニングストランド380aに引張力を加え、この引張力は、作動力として第1の作動ストランド38aに伝達され、この作動力は、第1のアンカ本体28aを、図12Aに示された第1の状態から、図12Eに示された拡張状態へ移動させる。
第1及び第2のアンカ本体28a及び28bが拡張状態に作動させられると、テンショニングストランド380a及び380bを保持アセンブリ390から解放することができる。例えば、以下で説明するように、保持アセンブリ390は、テンショニングストランド380a及び380bの端部のうちの一方を解放するよう構成することができる。これに代えて、以下でより詳細に説明するように、挿入器具300は、第1及び第2のテンショニングストランド380a及び380bを切断するよう構成された切断ブレードを有することができる。図19Cを参照すると、挿入器具300は、解放部材408を有することができ、この解放部材408は、保持アセンブリ390に結合されており、かつ保持アセンブリ390をアンロック状態に繰り返すよう構成されている。解放部材480は、第1のロッキング部材400と整合させることができるあらゆる適切なリンク機構410を有することができる。解放部材408は、ケーシング308によって支持されかつリンク機構410に結合されたアクチュエータ414を有することができ、これにより、使用者はアクチュエータ414を操作することができ、例えばアクチュエータを近位に摺動させることができ、これにより、リンク機構410を第1のロッキング部材400に接触させかつ第1のロッキング部材400を矢印401の方向に沿って近位にアンロック状態へ付勢し、これは、図19Bに示したように第1のロッキング部材400と内面398との間に間隙412を形成する。間隙は、テンショニングストランド380a及び380bの横断面寸法よりも大きくなっていることができる。
第2の端部380a′′及び380b′′が第2のロッキング部材402において結合されている場合、埋め込まれたアンカ本体28a及び28bに対する挿入器具300の近位の並進は、第1及び第2のテンショニングストランド380a及び380bの第1の端部380a′及び380b′を保持アセンブリ390から間隙を通って移動させ、各々の第1及び第2のテンショニングストランド380a及び380bを各々の作動ストランド38a及び38bを通ってさらに引っ張り、これにより、図18C及び図18Dに示したように作動ストランド38a及び38bから第1及び第2のテンショニングストランド380a及び30bを取り出す。これに代えて、第1及び第2の端部380a′′及び380b′′が、第2のロッキング部材402ではなく、第1のロッキング部材400によって保持されているならば、埋め込まれたアンカ本体28a及び28bに対する挿入器具300の近位の並進は、テンショニングストランド380a及び380bを挿入器具300から取り出す。次いで、作動ストランド38a及び38bから第1及び第2のテンショニングストランド380a及び380bを取り出すために、使用者は、テンショニングストランド380a及び380bを各々の作動ストランド38a及び30bを通って手作業で引っ張ることができる。
ここで図18Dを参照すると、テンショニングストランド380a及び380bが作動ストランド38a及び38bから取り出されると、使用者はコネクタ63を解剖学的構造に向かって引っ張ることができる。第1及び第2のアンカ本体28a及び28bが挿入器具300に装填されている時にコネクタ63を作動ストランド38a及び38bに取り付けることができることを認識すべきである。これに代えて、第1及び第2のアンカ本体28a及び28bが排出された後に、使用者は作動ストランド38a及び38bを接続することができる。図18C〜図18Eに示されたコネクタ部材63は、上述のタイプの結び目として構成されているが、コネクタ部材63は、択一的に望みに応じて構成することができる。図18C〜図18Eに示した実施の形態によれば、引張力を自由端部70に加えることができ、これは、コネクタ部材を解剖学的構造に向かって並進させ、これにより、接近力を作動ストランド38a及び38bに加え、これにより、組織間隙24cを狭める。次いで、コネクタ部材63から延びた作動ストランド38a及び38bの部分を、望みに応じて切断することができる。
ここで図20A及び図20Bを参照すると、上述のように、挿入器具300は、切断ブレード418を有する切断アセンブリ416を有することができ、保持アセンブリ390によって保持されたテンショニングストランド380a及び380bの第1の端部380a′及び380b′のような端部のうちの一方から切断ブレード418が間隔を置いて配置されている解離位置と、切断ブレードがテンショニングストランド380の第1の端部380a′及び380b′を切断する係合位置との間を可動である。図20A及び図20Bに示された保持アセンブリ390を図17に示したように構成することができ、保持アセンブリ390を1つのテンショニングストランドに取り付けることができ、これにより、切断ブレード418は、1つのテンショニングストランドの第1の端部を切断するよう構成されており、これにより、アンカ本体28a及び28bからの挿入器具300の取出しは、テンショニングストランドを、作動ストランド38a及び38bを通って、作動ストランド38a及び38bから引っ張ることを認識すべきである。
切断アセンブリ416は、長手方向に延在したシャフト420と、延在したシャフト420と切断ブレード418との間に回動可能に接続され、これにより、延在したシャフト420を切断ブレード418に接続しているスイッチ422とを有することができる。延在したシャフト420とスイッチ422とが切断ブレード418に間接的に接続されるように、切断ブレード418をブレードハウジング424によって支持することができる。長手方向に延在したシャフト420の近位端部は、ケーシング408から近位に延びていることができ、長手方向シャフトは、ケーシング408の側壁において延びていることができる。シャフト420は、解離した位置から係合した位置まで遠位方向に長手方向に可動である。シャフト420の遠位移動は、スイッチを回動させ、これにより、切断ブレード418を、第1及び第2のテンショニングストランド380a及び380bの第1の端部380a′及び380b′内へ近位に並進するよう駆動し、これにより、第1の端部380a′及び380b′を切断する。テンショニングストランド380a及び380bが切断されると、上述の形式で各々の作動ストランド38a及び38bからテンショニングストランド380a及び380bを取り出すために、器具を、排出されたアンカ本体28a及び28bに関して近位に並進させることができる。
ここで図21A及び図21Bを参照すると、切断アセンブリ416を望みに応じてあらゆる択一的な実施の形態に従って構成することができることを認識すべきである。例えば、切断アセンブリ416は、長手方向Lに関して角度方向にずれた方向に沿ってケーシング408の側壁から横方向に延び、かつ解離した位置から係合した位置まで半径方向内方へ可動な、アクチュエータ426を有することができる。アクチュエータ426は切断ブレード418を支持することができる。したがって、アクチュエータ426が半径方向内方へ移動する際に、切断ブレード418は、作動ストランド380a及び380bの第1及び第2の端部380a′及び380b′を切断する。挿入器具300は、作動ストランド380a及び380bの第1及び第2の端部を分離し、かつ切断ブレード418と整合させられた分割壁部428を有することができる。したがって、切断ブレード418は、分割壁部428内へ駆動され、第1及び第2の作動ストランド380a及び380bの第2の端部を切断しない。もちろん、1つのテンショニングストランドを上述のようにアンカアセンブリ20の作動ストランド38に接続することができ、これにより、切断ブレード418が、1つのテンショニングストランドの第1及び第2の端部のうちの一方を切断することができることを認識すべきである。
ここで図22A〜図22Dを参照すると、挿入器具300を、実質的に図7A〜図21Bに関して上述したように構成することができるが、別の実施の形態に従ってケーシング308とプッシュロッド330との相対移動を案内するためにケーシング308とプッシュロッド330とを作用的に接続するガイドシステム329を有することができる。例えば、ガイド軌道342は、上述のようにカラー332に形成することができるが、実質的に長手方向Lに沿って直線的に延びている。したがって、プランジャが第1及び第2のストロークに沿って遠位に並進する際に、ガイド軌道342はガイドピン344に関して直線的に並進する。図22A〜図22Dに示された実施の形態において、図13C〜図13Eに示された第2の凹所362を、第1の凹所354と長手方向で整合させることができ、これにより、ラッチ370は、プランジャ316を回転させることなくプランジャ316をカラー332から解離させるために、第1の凹所354から第2の凹所362内へ移動する。プランジャ316は、上述のようにキー318の一部を形成するシャフト部分430と、シャフト部分430の近位端部から半径方向に延びたグリップ部分432を形成することができる遠位端部キャップとを有することができる。カラー332は、シャフト部分430の周囲に少なくとも部分的に延びていることができ、例示した実施の形態に従ってシャフト部分430から半径方向に延びていることができる。
挿入器具300は、さらに、プランジャ316が第1の位置にある時のプランジャ316のグリップ部分432とカラー332の近位端部との間の長手方向距離と実質的に等しい長手方向長さを有するクリップ434を有することができる。クリップ434を、プランジャ316のシャフト部分430に取外し可能に固定することができる。つまり、プランジャ316が遠位に並進する際に、グリップ部分432はクリップ434をカラー332に対して付勢し、これは、カラー332をプランジャ316と共に並進させる。したがって、クリップ434は、長手方向Lに沿った遠位の並進に関してプランジャ316及びカラー332を接続することを認識すべきである。したがって、操作中、プランジャ316とカラー332とを、上述の形式で第1のストロークに沿って直列で第1の位置から第2の位置まで遠位に並進させることができる。プランジャ316とカラー332とが第1のストロークに沿って移動する際、ガイドピン344はガイド軌道342全体において近位に並進する。プランジャ316とカラー332とは、クリップ434がケーシング308に当接する時に第2の位置に到達し、この時点で、ラッチ部材370は、図14C及び図14Dに関して上述したように、第1の凹所354から第2の凹所358内へ移動する。次いで、クリップ434をプランジャ316から取り外すことができ、プランジャ316は、第2のストロークに沿ってカラー332に関して遠位に並進することができる。プランジャ316は、カラー332から独立して第2のストローク全体に沿って並進することができることを認識すべきである。
したがって、プランジャ及びカラー332が第1のストロークに沿って第1の位置から第2の位置へ移動させられた後、図9A〜図9Eに関連して上述したようにプッシュチューブ334は第2のアンカ本体38bを排出している。つまり、第2のアンカ本体28bを挿入器具から排出させる第1の距離だけプランジャ316を押し込むことができ、プランジャ316が第1の距離だけ押し込まれるとクリップ434がケーシング308に当接し、カラー434がプランジャ316から取り外されるまで、プランジャ316が第1の距離よりも大きな第2の距離だけ押し込まれることを防止する。次いで、図12A〜図12Eに関して上述した形式でプランジャ136が第2のストロークに沿って第2の位置から第3の位置へ移動させられた後、プッシュロッド330は第1のアンカ本体28aを排出することができる。第2のストロークが完了すると、ガイドピン344はガイド軌道342の近位端部に当接することができる。さらに、プランジャ316が第2のストロークを完了し、第3の位置へ移動すると、プランジャ316のグリップ部分432はケーシング308に当接することができる。図22A〜図22Dに示された実施の形態において、プランジャ316は、カラー332に回転可能に係合させられ、ひいてはカラー332に回転可能に固定されており、ラッチ370(上述されている)はカラー332をケーシング308に回転可能に結合するので、プランジャ316が第2のストロークに沿って並進する際にプランジャ316はケーシング308に対して回転することはできない。これに代えて、上述のようにラッチ370を第2の凹所362と整合させるために、プランジャ316を望みに応じて回転させるように挿入器具を構成することができる。
図7A〜図13Gに示された挿入器具に関して上述したように、ガイド軌道342をケーシング308によって支持することができ、ガイドピン344をプッシャアセンブリのうちの1つによって支持することができる。ここで図23Aを参照すると、挿入器具300は、ケーシング308によって支持された第1のガイド軌道446のような少なくとも1つのガイド軌道と、プッシャアセンブリ317によって支持された、特に第1のガイド軌道342に収容される、プランジャ316によって支持された第1のガイドピン448のような少なくとも1つのガイド部材とを有する。
図23Bに示したように、プランジャ316のシャフト部分430は、遠位面431を形成しており、さらに、遠位面431内へ長手方向に、又は遠位面内へ遠位に延びた第1の中央開口440を形成している。プランジャ316のシャフト部分430はさらに、ガイドピン448を収容する半径方向開口435を形成している。第1の開口440は、プランジャ316とプッシュロッド330とが長手方向並進及び回転の両方に関して互いに結合されるように、プッシュロッド330を収容する。図23Dに示したように、プッシュロッド330は、プランジャ316から、並進及び回転に関してケーシング308に固定されたカニューレ310内へ延びている。図23Cをも参照すると、先端部311は、長手方向軸線302と実質的に整合させられた、ひいてはカニューレ310の延在した開口312と実質的に整合させられた遠位排出ポート442を形成するように、カニュレートすることができる。プッシュロッド330は、上述の形式でチャネル312内で長手方向に可動である。これに代えて、挿入器具300は、実質的に以下に説明するように構成された側部排出ポートを形成することができる。第1のアンカ本体28aを第2のアンカ本体28bに取り付ける作動ストランド38a及び38b(図1A参照)の取付け部分133a及び133bがスロット337から延びることができるように、カニューレ310は長手方向スロット337を形成することができる。
ここで図23D及び図23Eをも参照すると、挿入器具は、ケーシング308とプッシュロッド330との相対移動を案内するためにケーシング308をプッシュロッド330に作用的に結合するよう構成されたガイドシステム444を有する。例えば、ガイドシステム444は、ケーシング308によって支持された第1のガイド軌道446の形態の第1のガイド部材と、プッシャアセンブリ317から延びた第1の案内ピン448として例示された第2のガイド部材とを有する。第1のガイド軌道446は、ケーシング308の半径方向内側の面へ半径方向外方に延びたスロットとして構成することができる。さらに、例示した実施の形態によれば、第1のガイドピン448は、プランジャ316のシャフト部分430から半径方向へ延びており、第1のガイド軌道448内に収容されている。第1のガイド軌道446は、実質的に長手方向に延びた第1の軌道部分446aと、第1の軌道部分446aの遠位端部から周方向に延びた中間軌道部分446bとを形成している。
引き続き図23Eを参照すると、ガイドシステム444は、さらに、ケーシング308によって支持された第2のガイド軌道450として構成された第3のガイド部材を有し、ケーシング308の内面へ半径方向外方に延びたスロットとして構成されている。第2のガイド軌道450は、実質的に長手方向に延びた第1の軌道部分450aと、第2のガイド軌道450bの遠位端部から周方向に延びた中間軌道部分450bとを形成している。中間軌道部分450bは、中間軌道部分446bが第1の軌道部分446aから延びるのと同じ方向で第1の軌道部分450aから延びている。
第1の軌道部分446a及び450aは、プッシュロッド330が第2のアンカを排出ポート442から排出させる、プランジャ316のための移動の第1のストロークを形成している。中間軌道部分446a及び450bは、第5のガイド部材を、第1の軌道部分446a及び450aから半径方向にずれた第2の軌道部分と整合させるために、プランジャが回転させられるよう構成されている。特に図23Bに示したように、挿入器具330は、さらに、中央開口440に隣接して配置されかつプランジャ416のシャフト部分430の遠位面431内へ長手方向に延びた、一対の開口452を有する。各開口452は、プランジャ416から遠位に延びたガイドポスト454(図23D)として構成された各々の第5のガイド部材と、ケーシング308の内部328に配置されかつ並進に関してケーシング308に固定されたガイドハウジング460として示された第6のガイド部材とを収容するよう構成されている。ガイドハウジング460は、第2のガイド軌道450に収容されるよう構成された半径方向外方へ延びた第2のガイドピン461として構成された第7のガイド部材を形成している。ガイドハウジング460は、さらに、ガイドハウジング460を通って長手方向に延びかつ第2の軌道部分462を形成した一対の開口のような、少なくとも1つの開口の形態の案内部材を形成している。第2の軌道部分462は、ガイドポスト454を収容するよう構成されている。ガイドハウジング460の近位端部は、第2の軌道部分462に隣接した位置において、ガイドハウジング460内へ長手方向に延びているがガイドハウジング460を貫通していない一対の凹所464を形成することができる。凹所464は、アーチ状であるか、又はこれに代えて望みに応じて成形することができる。
ここで図23A及び図23Fを参照すると、プランジャ316に遠位の付勢力を加えることができ、この付勢力は、プランジャ316及びプッシュロッド330を、第1のストロークに沿って遠位に、ケーシング308に対して、ひいてはカニューレ310及びガイドハウジング460に対して並進させる。プランジャ316は、図23Aに示された第1の位置から図23Fに示された第2の位置へ並進する。プランジャ316が第1の位置から第2の位置へ遠位に並進する際、第1のガイドピン448は、第1のガイドピン448が第1のガイド軌道446の中間軌道部分446bと整合させられるまで、第1のガイド軌道446の第1の軌道部分446aに沿って遠位に並進する。同様に、プランジャ316が第1の位置から第2の位置へ遠位に並進する際、第2のガイドピン461は、第2のガイドピン461が第2のガイド軌道450の中間軌道部分450bと整合させられるまで、第2のガイド軌道450の第1の軌道部分450aに遠位に並進する。プランジャ316が第2の位置へ並進すると、ガイドポスト454は、各々の第2の軌道部分462から周方向にずれ、例えば凹所464において、ガイドハウジング460に当接する。
ここで図23Gを参照すると、プランジャ316を矢印456の方向に沿って回転させることができ、これは、第1及び第2のガイドピン448及び461を、中間軌道部分446b及び450bの端部に達するまで、各々の中間軌道部分446b及び450bにおいて走行させる。中間軌道部分446b及び450bは、プランジャ316がケーシング308に対して回転しつづけることを防止しかつさらにガイドポスト454がガイドハウジング460に対して回転することを防止する各々のストッパを形成している。プランジャ316が回転を終了すると、ガイドポスト454は第2の軌道部分462と整合させられる。したがって、図23Hに示したように、プランジャ316を、第2のストロークに沿って第2の位置から第3の位置へ遠位にさらに並進させることができ、この箇所において、プランジャ316はガイドハウジング460に当接し、さらに遠位に移動することを防止される。つまり、ガイドハウジング460は、プランジャ316が第3の位置を超えて遠位に並進することを防止するストッパを形成している。
プランジャ316が第2のストロークに沿って並進する際、プッシュロッド330は、カニューレ310のチャネル312内で遠位に並進し、第1のアンカ本体28aを排出ポート442から排出する。各アンカ本体28a及び28bが、解剖学的構造(図1A参照)を超えた位置まで器具から排出された後、各アンカ本体28a及び28bに作動力を加えることができる。例えば、挿入器具330は、保持アセンブリ390又はあらゆる適切な択一的に構成された保持アセンブリのような、上述のタイプの保持アセンブリを有することができる。これに代えて、使用者は、各々の作動ストランド131a及び131bに作動力を手で加えることができる。次いで、コネクタ部材が、上述の形式で作動ストランド131a及び131bを互いに取り付けることができる。
ここで図24A〜図25Dを参照すると、第1及び第2のアンカ本体を保持する、並列の向きでケーシングによって支持された第1及び第2のカニューレと、第1及び第2のアンカ本体を各々の第1及び第2のカニューレから排出するために第1及び第2のカニューレにそれぞれ作用的に関連した第1及び第2のプッシャアセンブリとを有するよう、挿入器具を構成することができることを認識すべきである。所望のカニューレを他方のカニューレに挿入することなく下に位置する組織に挿入することができるように、アンカ本体が排出される所望のカニューレが他方のカニューレに関して遠位に配置されることを保証することが望ましいことができる。
図24Aに示したように、挿入器具300はケーシング308を有し、このケーシング308は、本体部分308aと、本体部分308aから延びたハンドル部分308bとを有する。挿入器具300は、さらに、ケーシング308、特に本体部分308aから遠位に延びた第1のカニューレ310aと、第1のカニューレ310aに隣接した位置において、ケーシング308、特に本体部分308aから遠位に延びた第2のカニューレ310bとを有する。例示したように、第1及び第2のカニューレ310a及び310bは、実質的に互いに平行に延びていることができる。したがって、第1及び第2のカニューレ310a及び310bは、並列関係であると説明することができる。第1及び第2のカニューレ310a及び319bは、各々の第1及び第2のアンカ本体28a及び28bを保持する各々の長手方向に延在したチャネル312a及び312bを形成することができる。
挿入器具300は、さらに、第1及び第2のカニューレ310a及び310bそれぞれと作用的に関連した第1及び第2のプッシャアセンブリ317a及び317bを有することができる。つまり、第1のプッシャアセンブリ317aは第1のアンカ本体28aを第1のカニューレ310aから排出するよう構成されており、第2のプッシャアセンブリ317bは第2のアンカ本体28bを第2のカニューレ310bから排出するよう構成されている。第1及び第2のカニューレ310a及び310bは、各々の第1及び第2のテーパした先端部311a及び311bと、各々の先端部311a及び311bを長手方向に貫通して延びた第1及び第2の遠位排出ポートとを形成することができる。
第1及び第2のプッシャアセンブリ317a及び317bの各々は、それぞれの第1及び第2のプランジャ316a及び316bと、対応するプランジャ316a及び316bから遠位に延びたそれぞれの第1及び第2のプッシャロッド330a及び330bとを有する。プランジャ316a及び316bの各々は、それぞれのシャフト部分430a及び430bと、対応するシャフト部分430及び430bの近位端部から半径方向に延びた第1及び第2のグリップ部分432a及び432bを形成することができるそれぞれの端部キャップとを形成している。第1及び第2のプランジャ316a及び316bがそれぞれの第1の位置にある時、第1及び第2のグリップ部分432a及び432bはケーシング308から近位に間隔を置かれている。挿入器具300は、さらに、第1及び第2のプランジャ316a及び316bに取外し可能に取り付けられた第1及び第2のロックアウトタブ468a及び468bを有することができる。例えば、例示した実施の形態によれば、第1及び第2のロックアウトタブ468a及び468bは、長手方向で、対応するグリップ部分432a及び432bとケーシング308との間の位置において、各々の第1及び第2のシャフト部分430a及び430bに取り付けられている。したがって、第1及び第2のロックアウトタブ468a及び468bは、各々のグリップ部分432a及び432bと干渉し、プランジャ316が、ケーシング308に対して、各々の第1及び第2のアンカ本体28a及び28bを排出する深さまで遠位に並進することを防止する。
挿入器具300は、さらに、ケーシング308内へ部分的に延びた、ハンドル部分308bから延びることができるトリガの形態のスワップアクチュエータ470を有することができる。スワップアクチュエータ470は、第1及び第2の先端部311a及び311bの相対位置を反転させるために第1の位置から作動位置へ移動させられるよう構成されている。アクチュエータ470の近位の並進が、第1のプラント316a及び第1のカニューレ310aを含む第1のプッシャアセンブリ317aを近位に並進させるように、スワップアクチュエータ470を第1のプッシャアセンブリ317aに結合することができる。図24Aに示したように、第1のカニューレ310aの第1の先端部311aは第2のカニューレ310bの第2の先端部311bに関して遠位に配置されている。さらに、第2のプッシュロッド330bの遠位端部と第1の先端部311aの遠位端部との間の長手方向距離が、下に位置する組織内への挿入深さを形成するように、第2のプッシュロッド330bの遠位端部は各々の第2の先端部133bから僅かに延びていることができる。言い換えれば、第2のプッシュロッド330bは、下に位置する組織内への第1の先端部311aの挿入のための深さストッパを形成することができる。つまり、第2の先端部311bを下に位置する組織内へ突入させることなく、例えば第1の目標解剖学的位置24a(図1A参照)において、第1の先端部311aを下に位置する組織内へ突入させることができることを認識すべきである。以下でより詳細に説明するように、第1の位置から第2の位置へのスワップアクチュエータ470の作動は、第1の先端部310aをケーシング308及び第2の先端部311bに対して近位に移動させ、これにより、下に位置する組織内へ第1の先端部311aを突入させることなく、例えば第2の目標解剖学的位置24b(図1B参照)において、第2の先端部311bを下に位置する組織内へ突入させることができる。
手術中、図24Bを参照すると、第1のプランジャ316aがケーシング308に対して遠位に、図24Aに示された第1の位置から、第1のグリップ部分432aがケーシング308に当接する図24Cに示された第2の位置へ移動することができるように、第1のロックアウトタブ468aを第1のプランジャ316aから取り外すことができる。第1のプッシュロッド330aは第1のプランジャ316aに並進可能に固定されているので、第1のプランジャ316aの遠位の並進は、第1のプッシュロッド330aを同様に第1のカニューレ310aにおいて並進させる。第1のプッシュロッド330aの遠位の並進が第1のアンカ本体28aを第1の排出ポートから例えば第1の目標解剖学的位置へ排出するように、第1のプッシュロッド330aは第1のアンカ本体28aに当接する。
次いで、図24Dを参照すると、図24Dに示したように、第2のロックアウトタブ468bを第2のプランジャ316bから取り外すことができる。図24Eを参照すると、第1の先端部311aが第2の先端部311bに対して近位に配置されるまで第1の先端部133aを第2のカニューレ310bに対して近位に引っ張るようにスワップアクチュエータ470を作動させる、例えば近位に移動させることができる。さらに、第1のプッシュロッド330aの遠位端部と第2の先端部311b遠位端部との間の長手方向距離が、下に位置する解剖学的構造への第2の先端部133bの挿入深さを規定するように、第1のプッシュロッド330aの遠位端部は各々の第1の先端部311aから僅かに延びていることができる。言い換えれば、第1のプッシュロッド330aは、下に位置する組織内への第2の先端部311aの挿入のための深さストッパを形成することができる。つまり、第1の先端部311aを下に位置する組織内へ突入させることなく、例えば第2の解剖学的位置24b(図1A)において、第2の先端部311bを下に位置する組織内へ突入させることができることを認識すべきである。例示した実施の形態によれば、スワップアクチュエータ470の作動は、さらに、第1のプランジャ316aを、図24Aに示された第1の位置まで近位に並進させる。
ここで図24Fを参照すると、第2のプランジャ316bは、ケーシング308に対して遠位に、図24Eに示した第1の位置から、第2のグリップ部分432bがケーシング308に当接する図24Fに示された第2の位置まで移動することができる。第2のプッシュロッド330bは第2のプランジャ316bに並進可能に固定されているので、第2のプランジャ316bの遠位への並進は、第2のプッシュロッド330bを同様に第2のカニューレ310bにおいて並進させ、これにより、第2のアンカ本体28bを第2の排出ポート442bから第2の目標解剖学的位置内へ噴射する。
ここで、図24A〜図25Dに示された挿入器具300の操作を特に図25A〜図25Dを参照してさらに説明する。特に、挿入器具300は、第1のラッチアセンブリ305a、第2のラッチアセンブリ305b、及び第3のラッチアセンブリ350cのような少なくとも1つのラッチアセンブリを有する。第1のラッチアセンブリ305aは、スワップアクチュエータ470が図24Dに示された第1の位置から図24Eに示された第2の後退した位置まで近位に移動すると、スワップアクチュエータ470を近位の位置にロックするよう構成されている。例えば、第1のラッチアセンブリ305aは、ケーシング308によって支持されたラッチ部材307を有することができ、スワップアクチュエータ470が第2の近位位置に位置するとスワップアクチュエータ470に当接するよう構成された近位当接面307aに向かって近位に延びており、これにより、ケーシング308に対するスワップアクチュエータ470の遠位の移動を妨害する。スワップアクチュエータ470が近位に移動する際、ラッチ部材307は、ラッチ部材307に対するスワップ部材470の近位の並進を許容するために、スワップアクチュエータ470から内方へ離れる方に撓むことができる。スワップアクチュエータ470がケーシング308に対して第1の初期位置から第2の近位位置へ移動すると、ラッチ部材307は、ばね力を受けて外方へ移動し、近位当接面307aがスワップアクチュエータ470に当接し、スワップアクチュエータ407がケーシング308に対して第2の位置から遠位に移動することを防止する。
第2のラッチアセンブリ305bは、スワップアクチュエータ470によって支持されかつスワップアクチュエータ470と一緒に移動可能な第1のラッチ部材347と、第1のプランジャ316aによって支持されかつ第1のプランジャ316aと一緒に移動可能な第2のラッチ部材349とを有する。第1のラッチ部材347は第1のカニューレ310aに取り付けられており、第1のラッチ部材347が第1のカニューレ310aをスワップアクチュエータ470と一緒に並進させる。第2のラッチ部材349は、本体349aと、本体349aの遠位端部におけるフックのような第1の取付け部分と、本体の近位端部における当接面のような第2の取付け部分とを有する(第2のラッチ部材349は、以下で説明される第3のラッチアセンブリ305cの第2のラッチ部材353の鏡像として構成することができる)。したがって、第1のプランジャ316aが図24Aに示された第1の位置から図24Bに示された第2の位置へ並進させられる際、フックは、第1のラッチ部材から内方へ離れるように撓み、第1のラッチ部材347に沿って及び第1のラッチ部材347を超えて乗る。第1のアンカ本体28aが排出されるように第1のプランジャ316aが図24Bに示された第2の位置に位置すると、第2のラッチ部材349のフックは、ばね力を受けて外方へ移動し、フックは第1のラッチ部材347の遠位に配置され、第2のラッチ部材の当接面は第1のラッチ部材347の近位に配置される。したがって、第1のラッチ部材347は、第2のラッチ部材349のフックと第2のラッチ部材349の当接面との間に捕捉される。つまり、第1及び第2のラッチ部材349は並進に関して結合される。
したがって、第1のアンカ本体28aが第1のカニューレ310aから押し出されると、第2のラッチ部材349は第1のラッチ部材347に取り付けられ、これは、第1のプランジャ316aをスワップアクチュエータ470に並進に関して並進可能に接続する。さらに、第1のラッチ部材347はスワップアクチュエータ470によって支持されておりかつさらに第1のカニューレ310aに取り付けられているので、スワップアクチュエータ470の近位への移動は、第1のカニューレ310a及び第1のプランジャ316の両方を近位に、第1の先端部311a及び第1のプッシュロッド330aが第2の先端部311bに対して近位に配置されるのに対し第1のプッシュロッド330aが第1の先端部311aの遠位に配置されたままである位置まで、移動させる。さらに、第1のプランジャ316aは近位及び遠位の並進に関してスワップアクチュエータ470に結合されており、スワップアクチュエータ470は少なくとも近位の並進に関してケーシング308に結合されているので、第1のアンカ本体28aが排出されると、第1のプランジャ316はケーシング308に対して近位に並進することを防止される。つまり、第1のプッシュロッド330aは、上述のように第2の先端部311bのための挿入深さストッパを提供することができる。
第3のラッチアセンブリ305cは、ケーシング308によって支持された第1のラッチ部材351と、第2のプランジャ316bによって支持された第2のラッチ部材353とを有する。第2のラッチ部材353は、本体353aと、本体353aの遠位端部におけるフックのような第1の取付け部分353bと、本体353aの近位端部に配置された当接面のような第2の取付け部分353cとを有する。第2のプランジャ316bが図24Eに示された第1の位置から図24Fに示された第2の遠位位置まで遠位に並進させられる時、例えば第2のアンカ本体28bを排出する時、フックは、第1のラッチ部材351から離れるように内方へ撓み、第1のラッチ部材351に沿って乗り、第1のラッチ部材351を超えて移動することができる。第2のアンカ本体28bが排出されるように第2のプランジャ316bが図24Fに示された第2の位置に位置すると、第2のラッチ部材353のフックは、第1のラッチ部材351の遠位の位置においてばね力を受けて外方へ移動し、第2のラッチ部材353の当接面は第1のラッチ部材351の近位に配置される。これにより、第1のラッチ部材351は、第2のラッチ部材353のフックと、第2のラッチ部材353の当接面との間に捕捉される。その結果、第2のアンカ本体28bが排出されると、第2のプランジャ316bはケーシング308に対して近位又は遠位に移動することを防止され、第2のプッシュロッド330bの鈍い遠位端部は第2の先端部311bの遠位に位置したままである。
アンカ本体28a及び28bが排出されると、アンカ本体28a及び28bを上述の形式で拡張させるために作動部分131a及び131b(図1A参照)に引張力を加えることができる。例えば、各々の作動部分131a及び131bと各々のロックアウトタブ468a及び468bとの間に、第1及び第2のテンショニングストランド380a及び380b(図18A及び図18B参照)を取り付けることができる。したがって、ロックアウトタブ468a及び468bが各々のプランジャ316a及び316bから取り外され、各々の第1及び第2のアンカ本体28a及び28bが排出された後、アンカ本体28a及び28bに対するロックアウトタブ468a及び468bの近位の移動により、対応するテンショニングストランド380a及び380bに引張力が加えられ、これは、アンカ本体28a及び28bを拡張させるために作動部分131a及び131bに引張力を伝達する。これに代えて、上述のあらゆる形式においてテンショニングストランド380a及び380bをケーシング308に固定することができる。
ここで図26A及び図26Bを参照すると、挿入器具300は、第1及び第2の作動ストランド38a及び38b(図1A)に作動力を加えるよう構成された、択一的な実施の形態により構成された保持アセンブリ490を有することができる。例えば、保持アセンブリ490は、第1及び第2の作動ストランド38a及び38bを直接に保持することができる。例示した実施の形態によれば、保持アセンブリ490は、挿入器具300に装填された時に取付け部分133a及び133bが取り付けられていない時に、第1及び第2のアンカ本体28a及び28bそれぞれの作動部分131a及び131bと取付け部分133a及び133bとを保持する。これに代えて、挿入器具300に装填された時に取付け部分133a及び133bが互いに予め取り付けられていると、保持アセンブリは作動部分131a及び131bのみを保持することができる。さらに択一的に、上述のように、少なくとも1つのテンショニングストランドを、第1及び第2の作動ストランド38a及び38bのそれぞれを通って縫うことができ、さらに保持アセンブリ490に保持することができる。構成に拘わらず、保持アセンブリは作動ストランド38a及び38bに、各々のアンカ本体28a及び28bを拡張状態に移動させる作動力を加えるよう構成することができる。
例示した実施の形態によれば、保持アセンブリ490を、図26Aに示した第1のカニューレ310aのような、カニューレのうちの一方又は両方に取り付けることができる。保持アセンブリ490は、第1のカニューレ310aに取り付けられかつ第1のカニューレ310aにおいて延びた横方向ストランド収容ギャップ493を形成する、保持ハウジング492のような第1のロッキング部材を有することができる。特に、保持ハウジングは第1の又は近位のハウジング部分492aと、第2の又は遠位のハウジング部分492bとを有し、第1及び第2のハウジング部分492a及び492bの間にはギャップ493が配置されている。保持アセンブリ490はさらに、例えばギャップ493と整合させられた位置において、保持ハウジング492、例えば第1のハウジング部分492aに螺合により取り付けられることができる、ピンチャ494のような第2のロッキング部材を有することができる。第1の方向での保持ハウジング492に対するピンチャ494の回転は、ピンチャ494をギャップ493内へ第2のハウジング部分492bに向かって並進させる。第1の方向とは反対の第2の方向での保持ハウジング492に対するピンチャ494の回転は、ピンチャ494を、ギャップ493から、第2のハウジング部分492bから離れる方向へ並進させる。
したがって、手術中、1つ又は複数の作動ストランド38a及び38b又は少なくとも1つのテンショニングストランドのような1つ以上の目標ストランド379をギャップ493に装填することができ、保持アセンブリ490がピンチャ494の遠位端部と第2のハウジング部分492bとの間に目標ストランド379を捕捉するまで、ピンチャ494を第1の方向に回転させることができる。第1及び第2のアンカ本体28a及び28bが各々の第1及び第2の目標解剖学的位置(図1A参照)へ排出されると、挿入器具を解剖学的位置から離れるように近位に並進させることができ、これにより第1及び第2の作動ストランド38a及び38bに直接的に又は間接的に作動力を加え、これによりアンカ本体28a及び28bを拡張状態に作動させる。次いで、挿入器具300を目標ストランド379から引き出すことができるまでギャップ493を増大させるためにピンチャ494を第2の方向に沿って回転させることができる。これに代えて又はこれに加えて、例えば目標ストランド379がテンショニングストランドとして提供される場合、テンショニングストランドを保持アセンブリ490に保持しながら切断することができる。カニューレ310a及び310bは、カニューレ310a及び310bの一方の側を貫通して延びる長手方向スロットを形成することができるので、対応するアンカ本体28a及び28bがカニューレから排出される時に、作動ストランド38a及び38bを各々のカニューレから、例えば長手方向スロットから解放することができる。
ここで概して図27A〜図28Bを参照すると、挿入器具は、第1及び第2のアンカ本体28a及び28bを保持する、並列の向きでケーシング308によって支持された第1及び第2のカニューレ310a及び310bと、各々の第1及び第2のカニューレ310a及び310bから第1及び第2のアンカ本体28a及び28bを排出するために第1及び第2のカニューレ310a及び310bそれぞれに作用的に関連した第1及び第2のプッシャアセンブリ317a及び317bとを有するよう構成することができる。さらに、上述のように、他のカニューレを挿入することなく所望のカニューレを下に位置する組織に挿入することができるように、アンカ本体が排出される所望のカニューレが他方のカニューレに対して遠位に配置されることを保証することが望ましいことができる。
図27Aに示したように、挿入器具300はケーシング308を有し、ケーシング308は、本体部分308aと、本体部分308aから延びたハンドル部分308bとを有する。挿入器具300は、さらに、第1のカニューレ310aに隣接した位置において、ケーシング308から、特に本体部分308aから遠位に延びた第1のカニューレ310aと、ケーシング308から、特に本体部分308aから延びた第2のカニューレ310bとを有する。第1及び第2のカニューレ310a及び310bは、例示したように互いに実質的に平行に延びていることができる。したがって、第1及び第2のカニューレ310a及び310bは、並列の関係であると説明することができる。第1及び第2のカニューレ310a及び310bは、各々の第1及び第2のアンカ本体28a及び28bを保持する、各々の長手方向に延在したチャネル312a及び312bを形成することができる。
挿入器具300は、さらに、第1及び第2のカニューレ310a及び310bそれぞれに作用的に関連した第1及び第2のプッシャアセンブリ317a及び317bを有することができる。つまり、第1のプッシャアセンブリ317aは、第1のカニューレ310aから第1のアンカ本体28aを排出するよう構成されており、第2のプッシャアセンブリ317bは、第2のカニューレ310bから第2のアンカ本体28bを排出するよう構成されている。第1及び第2のカニューレ310a及び310bは、各々の第1及び第2のテーパした先端部311a及び311bと、各々の先端部311a及び311bを長手方向に貫通して延びた第1及び第2の遠位の排出ポート442a及び442とを形成することができる。
第1及び第2のプッシャアセンブリ317a及び317bの各々は、ケーシング308の本体部分308aのような、ケーシング308から延びた、第1及び第2のプランジャ316a及び136bをそれぞれ有する。第1及び第2のプランジャ316a及び316bは、図24A〜図24Fに関して上述したようにケーシング308から近位に延びることができるか、ケーシング308から突出する各々のタブ323a及び323bを提供するために、長手方向Lに関して角度方向にずれた方向に沿ってケーシングから延びることができる。第1及び第2のプッシャアセンブリ317a及び317bの各々は、さらに、対応するプランジャ316a及び316bから遠位に延びる、第1及び第2のプッシャロッド330a及び330bをそれぞれ有することができる。第1及び第2のプランジャ316a及び316bが各々の第1の位置(図27A)に位置すると、第1及び第2のアンカ本体28a及び28bは各々のカニューレ310a及び310bに配置される。各々のカニューレ310a及び310bから各々の第1及び第2のアンカ本体28a及び28bを排出するために、プランジャ316a及び316bを各々の第2の位置(図27D)へ移動させることができる。
挿入器具300は、さらに、スワップアクチュエータ470を有することができ、スワップアクチュエータ470は、ケーシング308から延びたスワップタブ470aを有することができ、第1及び第2のタブ323a及び323bの間の位置において本体部分308aから延びていることができる。ケーシング308は、スロット367a〜367cを形成することができ、スロット367a〜367cは、本体部分308の上端部を貫通して延びておりかつ長手方向に延在しており、第1及び第2の端部323a及び323bが第1及び第2のスロット367a及び367bから延びるように位置決めされており、スワップタブ470aは、第1及び第2のタブ323a及び323bの間の位置において第3のスロット367cから延びている。つまり、スロット367a〜367cは、タブ323a,323bが各々のスロット367a〜367cに収容される際に第1及び第2のプッシャアセンブリ317a及び317bとスワップアクチュエータ470との長手方向移動を規定する軌道を提供する。スワップアクチュエータ470は、第1及び第2の先端部311a及び311bの相対位置を反転させるために第1の位置から作動位置へ移動させられるよう構成されている。例えば、図27Aに示したように、第1のカニューレ310aの第1の先端部311aは、第2のカニューレ310bの第2の先端部311bに対して遠位に配置されている。つまり、第2の先端部311bを下に位置する組織内へ突入させることなく、例えば第1の目標解剖学的位置24a(図1A参照)において、第1の先端部311aを下に位置する組織内へ突入させることができることを認識すべきである。以下により詳細に説明するように、矢印355(図27C)の方向に沿った第1の位置(27A)から第2の位置へのスワップアクチュエータ470の作動は、第2の先端部311bを第1の先端部311aに対して遠位に移動させ、これにより、第1の先端部311aを下に位置する組織内へ突入させることなく、例えば第2の目標解剖学的位置24b(図1B参照)において、第2の先端部311bを下に位置する組織内へ突入させることができる。
手術中、図27A及び図27Bを参照すると、第1のプランジャ316aを矢印357の方向に沿って遠位に第1の位置から第2の位置へ並進させることができ、これは、第1のプッシュロッド330aを同様に第1のカニューレ310aにおいて遠位に並進させる。第1のプッシュロッド330aは第1のアンカ本体28aに当接し、第1のプッシュロッド300aが第2の位置へ遠位に並進する際に、第2のプッシュロッド330aは、第1のアンカ本体28aを第1のカニューレ310aから、例えば第1の目標解剖学的位置内へ排出する。第1のプッシャアセンブリ317aが、第1のアンカ本体28aが排出された第2の位置に位置している時に、第1のプランジャタブ323aは第1のスロット367aの遠位端部においてケーシング308に当接する。つまり、第1のプランジャタブ323aが第2の位置に位置している時、プランジャ316aは、さらなる遠位の並進を防止される。つまり、使用者には、第1のアンカ本体28aが排出されたという触覚フィードバックが提供される。
次いで、図27Cを参照すると、スワップアクチュエータ470を作動させることができ、例えば矢印355の方向に沿って遠位に第1の位置から作動位置へ移動させることができ、これは、第2の先端部311bが第1の先端部311aに対して遠位に配置されるまで、第2の先端部311bをケーシング308及び第1のカニューレ310aに対して前進、若しくは遠位に並進させる。第1の先端部311aを下に位置する組織内へ突入させることなく、例えば第2の目標解剖学的位置24b(図1A参照)において、第2の先端部311bを下に位置する組織内へ突入させることができることを認識すべきである。例えば、第1の先端部311aに対して遠位に配置された第1のプッシュロッド330aの遠位端部は、第2の目標解剖学的位置内への第2の先端部311bの挿入のための深さストッパを提供することができる。つまり、第1のプッシュロッド330aが解剖学的構造に当接するまで、第2の先端部311bを突入させることができる。例示した実施の形態において、スワップアクチュエータ470の作動は、さらに、第2のプランジャ316b、ひいては第2のプッシュロッド330bを、図27Cに示したように遠位に並進させる。スワップアクチュエータ470が作動位置へ移動させられると、スワップタブ470aは、第3のスロット367cの遠位端部においてケーシング308に当接し、スワップアクチュエータ470はさらなる遠位の並進が防止される。つまり、使用者には、スワップアクチュエータ470が作動させられたという触覚フィードバックが提供される。
ここで図27Dを参照すると、第2のプランジャ316bを矢印359の方向に沿って遠位に第1の位置から第2の位置へ並進させることができ、これは、第2のプッシュロッド330bを同様に第2のカニューレ310bにおいて遠位に並進させる。第2のプッシュロッド330bは第2のアンカ本体28bに当接し、第2のプッシュロッド300bが第2の位置へ遠位に並進する際に、第2のプッシュロッド330bが、第2のアンカ本体28bを第2のカニューレ330bから、例えば第2の目標解剖学的位置内へ排出する。第2のプッシャアセンブリ317が、第2のアンカ本体28bが排出された第2の位置に位置している時、第2のプランジャタブ323bは第2のスロット367bの遠位端部においてケーシング308に当接する。つまり、プランジャタブ323bが第2の位置に位置している時、プランジャ316はさらなる遠位の並進が防止される。つまり、使用者には、第2のアンカ本体28bが排出されたという触覚フィードバックが提供される。
ここで図27A〜図28Bに示された挿入器具300の操作を図28A及び図28Bを特に参照して説明する。特に、挿入器具300は、第1のラッチアセンブリ482、第2のラッチアセンブリ484及び第3のラッチアセンブリ486のような少なくとも1つのラッチアセンブリを有する。第1のラッチアセンブリ482は、スワップアクチュエータ470が図27Bに示された第1の位置から図27Cに示された第2の凹んだ位置へ遠位に移動させられるとスワップアクチュエータ470を遠位位置にロックするよう構成されている。例えば、第1のラッチアセンブリ482は、ラッチ部材488を有することができ、ラッチ部材488は、ケーシング308によって支持されており、スワップアクチュエータ470を並進に関して結合するためにスワップアクチュエータ470に掛合する。ラッチ部材488は、本体488aと、本体488aによって支持されたフックの形態の第1の取付け部分488bと、第1の取付け部分488bの遠位に配置された本体488bによって支持された当接面の形態の第2の取付け部分488cとを形成している。スワップアクチュエータ470が遠位に移動する際、スワップアクチュエータ470の外方ヘ突出したタブ470aのような、ラッチ部材488に対するスワップ部材470の遠位の並進を許容するために、第1の取付け部分488aはスワップアクチュエータ470から内方へ離れるように撓むことができる。スワップアクチュエータ470がケーシング308に対して第1の初期位置から第2の遠位位置へ移動させられると、スワップアクチュエータ470は当接面に接触し、フックは、本体488aのばね力を受けて外方へ撓むことができ、これにより、スワップアクチュエータ470、例えばタブ470aは、第1及び第2の取付け部分488b及び488cの間に捕捉される。したがって、スワップアクチュエータ470が、第2のプッシャアセンブリ317bを第1のプッシャアセンブリ316aに対して遠位に前進させる近位位置へ移動させられると、ラッチ部材488は、スワップアクチュエータ470がケーシングに対して近位及び遠位に移動することを防止される。
挿入器具300は、さらに、ケーシング308に並進可能に固定されたガイドワイヤのような少なくとも1つのガイド部材483aを有することができる。例えば、挿入器具300は、ケーシング308によって支持されかつ第1のガイド部材483aに取り付けられたマウント485を有することができる。第1のガイド部材483は、スワップアクチュエータが遠位に並進するのを案内するために、スワップアクチュエータ470を貫通して延びることができる。
第2のラッチアセンブリ484は、第1のプランジャ316aが図27Aに示された第1の位置から、第1のプッシュロッド330aが第1のアンカ本体28aを排出させる図27Bに示された第2の遠位位置へ移動させられると、第1のプランジャ316a、ひいては第1のプッシャアセンブリ316aを近位位置にロックするよう構成されている。例えば、第2のラッチアセンブリ484は、ケーシング308によって支持された、並進に関して第1のプランジャ316aに結合されるために第1のプランジャ316aに掛合するよう構成されたラッチ部材489を有することができる。第2のラッチ部材489は、第1のラッチ部材488に関して実質的に同じに構成することができ、ひいては、本体と、本体によって支持されたフックの形態の第1の取付け部分と、本体によって支持された、フックの遠位に配置された当接面の形態の第2の取付け部分とを形成している。第1のプランジャ316aが遠位に移動する際、第1のプランジャ316aの外方へ突出したタブ316cのような、第2のラッチ部材489に対する第1のプランジャ316aの遠位の並進を許容するために、第1の取付け部分は第1のプランジャ316aから内方へ離れるように撓むことができる。第1のプランジャ316aがケーシング308に対して第1の初期位置から第2の遠位位置へ移動させられると、第1のプランジャ316aは当接面に接触し、フックは、ラッチ部材489の本体のばね力を受けて外方へ撓むことができ、これにより、第1のプランジャ316a、例えばタブ316cは、ラッチ部材489の第1及び第2の取付け部分の間に捕捉される。したがって、第1のプランジャ316が、第1のアンカ本体28aを第1のカニューレ310aから排出する遠位位置へ移動させられると、ラッチ部材489は、第1のプランジャ316aがケーシング308に対して近位及び遠位に移動することを防止する。
挿入器具300は、さらに、ケーシング308に並進可能に固定されたガイドワイヤのような少なくとも1つの第2のガイド部材483bを有することができる。例えば、マウンド485を第2のガイド部材483bに取り付けることができ、このマウント485は、第1のプランジャ316aが遠位に並進するのを案内するために第1のプランジャ316aを貫通して遠位に延びることができる。
第2のプランジャ316bが、図27Cに示された第1の位置から、第2のプッシュロッド330bが第2のアンカ本体28bを排出させる図27Dに示された第2の遠位位置へ遠位に移動させられると、第3のラッチアセンブリ486は、第2のプランジャ316b、ひいては第2のプッシャアセンブリ317bを遠位位置にロックするよう構成されている。例えば、第3のラッチアセンブリ486は、第3のラッチ部材495を有することができ、この第3のラッチ部材495は、ケーシング308によって支持されており、かつ並進に関して第2のプランジャ316bに結合されるために第2のプランジャ316bに掛合するよう構成されている。第3のラッチ部材495は、第1及び第2のラッチ部材488及び489に関して実質的に同じに構成することができ、ひいては、本体495aと、本体495aによって支持されたフックの形態の第1の取付け部分405bと、フックの遠位の位置において本体495aによって支持された当接面の形態の第2の取付け部分405cとを形成している。第2のプランジャ316bが遠位に移動する際、第2のプランジャ316bの外方へ突出したタブ316bのような、第3のラッチ部材405に対する第2のプランジャ316bの近位の並進を許容するために、第1の取付け部分495bは、第2のプランジャ316bから内方へ離れるように撓むことができる。第2のプランジャ316bがケーシング308に対して第1の初期位置から第2の近位位置へ移動させられると、第2のプランジャ316bは、例えばタブ316dにおいて、当接面495cに接触し、フック495bは、ラッチ部材本体495aのばね力を受けて外方へ撓むことができ、これにより、第2のプランジャ316bは、ラッチ部材495の第1及び第2の取付け部分の間に捕捉される。したがって、第2のプランジャ316bが、第2のアンカ本体28bを第2のカニューレ310bから排出する遠位位置へ移動させられると、ラッチ部材495は、第2のプランジャ316bがケーシング308に対して近位及び遠位に移動することを防止する。
挿入器具300は、さらに、ケーシング308に並進可能に固定されたガイドワイヤのような少なくとも1つの第3のガイド部材483cを有することができる。例えば、マウント485を第3のガイド部材483cに取り付けることができる。マウント485は、第2のプランジャ316bが遠位に並進するのを案内するために、第2のプランジャ316bを貫通して遠位に延びることができる。さらに、挿入器具300は、スワップアクチュエータ470の遠位の並進に関して第2のプランジャ316bをスワップアクチュエータ470に取り付ける取付けワイヤの形態の取付け部材496を有することができる。例えば、スワップアクチュエータ470の遠位の並進は、第2のプランジャ316bを、スワップアクチュエータ470と一緒に遠位に並進させる。第2のプランジャ316bに加えられる遠位の力は、第2のプランジャ316bを、スワップアクチュエータ470に対して遠位に並進させることができる。1つの実施の形態によれば、取付け部材496は、スワップアクチュエータ470に並進可能に固定することができ、取付け部材493に対する第2のプランジャ316の近位移動316bに関して第2のプランジャ316と干渉するように、第2のプランジャ316bに取り付けることができる。スワップアクチュエータ470は、並進に関して第2のカニューレ310bに取り付けられる第2のタブ470bを有することができ、これにより、スワップアクチュエータ470の遠位の並進は、第2のカニューレ310bを、スワップアクチュエータ470と一緒に遠位に並進させる。したがって、スワップアクチュエータ470の遠位の並進により、取付け部材496は第2のプランジャ316bと、第2のカニューレ310bと、第2のプッシュロッド330bとを遠位に、第2の先端部311bが第1の先端部311aの遠位に配置されるまで引きずる。第1のアンカ本体28aが排出された後第1のプッシャロッド330aは第1の先端部311aの遠位に配置されたままであるので、第1のプッシャロッド330aの遠位端部は、上述の形式での第2の先端部311bの挿入深さストッパを形成することができる。
第2のプランジャ496bを、取付け部材496に関して、ひいてはスワップアクチュエータ470にも関して遠位に並進させるために、取付け部材496は第2のプランジャ496bを少なくとも部分的に通って延びていることができる。その結果、スワップアクチュエータ470が遠位に並進させられ、これにより、第2のカニューレ310b及び第2のプッシャアセンブリ317bをも遠位に並進させると、第2のプランジャ316bの並進により、第2のプッシュロッド330bは、上述の形式で第2のカニューレ310bから第2のアンカ本体28bを排出させる。
ここで概して図29A〜図29Gを参照すると、挿入器具300は、第1及び第2のアンカ本体28a及び28bを保持する、並列の向きでケーシング308によって支持された第1及び第2のカニューレ310a及び310bと、各々の第1及び第2のカニューレ310a及び310bから第1及び第2のアンカ本体28a及び28bを排出するために、第1及び第2のカニューレ310a及び310それぞれに作用的に関連した第1及び第2のプッシャアセンブリ317a及び317bとを有するように構成することができる。さらに、上述のように、アンカが排出される所望のカニューレが他方のカニューレに関して遠位に配置され、これにより、所望のカニューレを、他方のカニューレをも挿入することなく、下に位置する組織に挿入することができることを保証することが望ましいことができる。
図29Aに示したように、挿入器具300はケーシング308を有し、ケーシング308は、第1のケーシング部分308aと、第1のケーシング部分308bに隣接して配置された第2のケーシング部分308bとを有する。挿入器具300は、さらに、第1のケーシング部分308aから遠位に延びた第1のカニューレ310aと、第2のケーシング部分308bから遠位に延びた第2のカニューレ310bとを有する。第1及び第2のケーシング部分308a及び308bは、例示したように互いに実質的に平行に延びていることができる。したがって、第1及び第2のカニューレ310a及び310bは、並列関係であると説明することができる。第1及び第2のカニューレ310a及び310bは、上述の形式で各々の第1及び第2のアンカ本体28a及び28bを保持する各々の長手方向に延在したチャネルを形成していることができる。第1及び第2のチャネル310a及び310bは、さらに、カニューレの一方の側内へ延びかつ各々の延在したチャネルと連通した、長手方向に延在した側部スロット337a及び337bを有することができる。したがって、作動ストランド38a及び38bの取付け部分133a,133bは、各々の側部スロット337a及び337bから延びていることができ、第1及び第2のアンカ本体28a及び28bが各々の第1及び第2のカニューレ310a及び310bに装填された時に互いに取り付けられることができる(図1A参照)。
挿入器具300は、さらに、第1及び第2のカニューレ310a及び310bそれぞれに作用的に関連した第1及び第2のプッシャセンブリ317a及び317bを有することができる。つまり、第1のプッシャアセンブリ317aは、第1のカニューレ310aから第1のアンカ本体28aを排出するよう構成されており、第2のプッシャセンブリ317bは、第2のカニューレ310bから第2のアンカ本体28bを排出するよう構成されている。第1及び第2のカニューレ310a及び310bは、各々の第1及び第2のテーパした先端部311a及び311bと、各々の先端部311a及び311bを通って長手方向に延びる第1及び第2の遠位排出ポートとを形成していることができる。
第1及び第2のプッシャセンブリ317a及び317bのそれぞれは、第1及び第2のプランジャ316a及び316bをそれぞれ有し、第1及び第2のプランジャは、例示したようにケーシング部分308a及び308bに対して近位の位置において各々の第1及び第2のケーシング部分308a及び308bの外側に配置されている。第1及び第2のプッシャセンブリ317a及び317bのそれぞれは、さらに、第1及び第2のプッシャロッド330a及び330bをそれぞれ有することができ、第1及び第2のプッシャは、対応するプランジャ316a及び316bから、各々の第1及び第2のケーシング部分308a及び308bを通って、各々の第1及び第2のカニューレ310a及び310b内へ遠位に延びている。第1及び第2のプランジャ316a及び316bが各々の第1の位置(図29A)に位置している時、第1及び第2のアンカ本体28a及び28bは、各々のカニューレ310a及び310bに配置されている。各々のカニューレ310a及び310bから各々の第1及び第2のアンカ本体28a及び28bを排出するために、プランジャ316a及び316bを各々の第2の位置(図29F)へ移動させることができる。
挿入器具330は、さらに、スワップアクチュエータ470を有することができ、このスワップアクチュエータ470は、第1のケーシング部分308aを通って第2のケーシング部分308b内へ横方向に延びるスワップボタン470aを有することができる。スワップアクチュエータ470は、長手方向Lでの相対的な並進に関して、第1及び第2のケーシング部分を選択的に結合したり、解離したりするよう構成されている。例えば、図29B及び図29Dに示したように、第1及び第2のケーシング部分308a及び308bは、長手方向に沿って摺動可能に結合することができる。例えば、第1のケーシング部分308aのような、ケーシング部分のうちの1つは、長手方向長さの少なくとも一部に沿って延びたスロット375を形成していることができる。第2のケーシング部分308bのような、他のケーシング部分は、突出部377のようなスライダ部材を有することができ、この突出部377は、互いに対する第1及び第2のケーシング部分308a及び308bの長手方向移動を案内するためにスロット内に収容されるよう構成されている。スロット375及び突出部377は、ダブテール配列において角度方向で外方へ拡開することができ、これにより、第1及び第2のケーシング部分308a及び308bは、長手方向Lから角度方向にずれた方向に沿って分離することを防止される。スワップアクチュエータ470は、長手方向に沿って互いに対して第1及び第2のケーシング部分308a及び308bを移動させるよう構成されており、これにより、各々の先端部311a及び311bは、第1の相対位置から、第1の相対位置とは反対の第2の相対位置へ移動する。
例えば、図29Aに示したように、第1のカニューレ310aの第1の先端部311aは、最初は、第2のカニューレ310bの第2の先端部311bに対して遠位に配置することができる。つまり、第1の先端部311aを、例えば第1の目標解剖学的位置24a(図1A参照)において、第2の先端部311bを下に位置する組織内へ突入させることなく、下に位置する組織内へ突入させることができることを認識すべきである。以下でより詳細に説明するように、第1の位置(図29D)から第2の位置へのスワップアクチュエータ470の作動は、第2の先端部311bを第1の先端部311aに対して遠位に移動させ、これにより、第2の先端部311bは第1の先端部311aの遠位に位置決めされる。したがって、第2の先端部311bを、第1の先端部311aが下に位置する組織内へ突入させられることなく、例えば第2の目標解剖学的位置24bにおいて、下に位置する組織内へ突入させることができる。
手術中、図29Cを参照すると、第1のプランジャ316aを第1の位置から第2の位置へ遠位に並進させることができ、これは、第1のプッシュロッド330aを同様に第1のカニューレ310aにおいて並進させる。第1のプッシュロッド330aは第1のアンカ本体28aに当接し、これにより、第1のプッシュロッド300aが第2の位置へ遠位に並進する際に、第1のプッシュロッド330aは、第1のアンカ本体28aを第1のカニューレ310aから、例えば第1の目標解剖学的位置内へ排出する。第1のプッシャアセンブリ317aが、第1のアンカ本体28が排出された第2の位置に位置している時、第1のプランジャ316aは第1のケーシング部分308aに当接することができる。つまり、第1のプランジャ316aが第2の位置に位置している時、第1のプランジャ316aはさらなる遠位の並進が防止される。つまり、使用者には、第1のアンカ本体28aが排出されたという触覚フィードバックが提供される。
次いで、図29C、図29D、及び図29Gを参照すると、上述の形式での第1及び第2の先端部311a及び311bの相対位置を反転させるためにスワップアクチュエータ470を作動させることができる。例えば、スワップアクチュエータ470は、第1のケーシング部分308aを通って第2のケーシング部分308b内へ横方向に延びたボタン472を有することができる。第2のケーシング部分308bは、ボタン472を第1の位置に向かって外方へ付勢するばね部材474を有することができる。ボタン472は少なくとも1つのフランジ476を有することができる。フランジ476は、ばね部材474の力がボタン472を第1のケーシング部分308aから排出させるのを防止するために、第1のケーシング部分308aの壁部に当接する。
第1のケーシング部分308aは一対の開口478a,478bを有することができる。開口478a,478bは、ボタン472が第1のケーシング部分308aから延びるようにボタン472を収容するよう寸法決めされている。第1の開口478aは、第2の開口478bに対して近位に配置されている。ボタン472が第1の開口478aを通って延びている時、第1の先端部311aは第2の先端部311bに対して遠位に配置されている。さらに、ボタン472と第1のケーシング部分308aとの干渉は、第1のケーシング部分308aが第2のケーシング部分308bに対して長手方向に並進することを防止する。ボタン472がスロット375内へ、つまり突出部377内へ押し込まれると、ボタン472と第1のケーシング部分308aとの干渉が排除され、第1及び第2のケーシング部分308a及び308bは、互いに対して長手方向に並進するよう構成される。例えば、図29Dに示したようにボタン472が第2の開口478bを通って駆動されるまで、第2のケーシング部分308b、ひいては第2のカニューレ310bは、第1のケーシング部分308a、ひいては第1のカニューレ310aに対して遠位に摺動することができる。ボタン472が第2の開口478bを通って延びている時、第2の先端部311bは第1の先端部311aに対して遠位に配置される。つまり、第2の先端部311bを、例えば第2の目標解剖学的位置24b(図1A参照)において、第1の先端部311aを下に位置する組織内へ突入させることなく、下に位置する組織内へ突入させることができることを認識すべきである。
ここで図29D〜図29Eを参照すると、挿入器具300は、さらに、長手方向で、対応するプランジャ316bと第2のケーシング部分308bとの間の位置において第2のプッシュロッド330bに取外し可能に取り付けられた、ロックアウトタブ468を有することができる。したがって、ロックアウトタブ468は、各々の第2のアンカ本体28bを排出する深さへの第2のケーシング部分308bに対するプランジャ316bの遠位の並進と干渉する。第1のアンカ本体28aが排出され、かつスワップアクチュエータ470が作動させられるまで、ロックアウトタブ468は第2のプッシュロッド330bに取り付けられたままであることができる。挿入器具300は、さらに、第2のプッシャアセンブリ317bに関して説明した形式で第1のプッシャアセンブリ317に作用的に関連したロックアウトタブを有することができる。
ここで図29E及び図29Fを参照すると、ロックアウトタブ468が第2のプッシュロッド430から取り外されると、第2のプランジャ316bを第1の位置から第2の位置へ遠位に並進させることができ、これは、第2のプッシュロッド330bを同様に第2のカニューレ310bにおいて遠位に並進させる。第2のプッシュロッド330bは第2のアンカ本体28bと当接し、これにより、第2のプッシュロッド300bが第2の位置へ遠位に並進する際に、第2のプッシュロッド330bは、第2のカニューレ330bから、例えば第2の目標解剖学的位置内へ第2のアンカ本体28bを排出する。第2のアンカ本体28bが排出された後に、第2のプランジャ416bのグリップ部分432bは遠位端部においてケーシング308に当接し、これにより、使用者に、第2のアンカ本体28bが排出されたという触覚フィードバックを提供する。
ここで概して図30A〜図30Dを参照すると、挿入器具300を、第1及び第2のアンカ本体をそれぞれ保持する、並列の向きでケーシング308によって支持された第1及び第2のカニューレ310a及び310bを有するように構成することができる。第1及び第2のカニューレ310a及び310bのそれぞれは、ケーシング308に対して並進移動可能であるようにケーシング308によって支持されている。挿入器具300は、さらに、第1及び第2のカニューレ310a及び310bを互いに反対方向に駆動するよう構成された往復運動アセンブリ500を有する。例えば、第1のカニューレ310aがケーシング308に対して遠位に駆動されると、往復運動アセンブリ500は、第2のカニューレ310bをケーシング308に対して近位に駆動する。同様に、第1のカニューレ310aがケーシング308に対して近位に駆動されると、往復運動アセンブリ500は第2のカニューレ310bをケーシング308に対して遠位に駆動する。同様に、第2のカニューレ310bがケーシング308に対して駆動されると、往復運動アセンブリ500は第1のカニューレ310aをケーシング308に対して駆動する。同様に、第2のカニューレ310bがケーシング308に対して近位に駆動されると、往復運動アセンブリ500は第1のカニューレ310aをケーシング308に対して遠位に駆動する。
挿入器具300は、プランジャ316と、第1及び第2のプッシャ部材330a及び330bとを有するプッシャアセンブリ317を有することができる。第1のプッシャ部材330aは、第1のカニューレ330a内へ延びており、上述の形式で第1のアンカ本体を第1のカニューレ330aから排出するよう構成されている。同様に、第2のプッシャ部材330bは、第2のカニューレ330b内へ延びており、上述の形式で第2のアンカ本体28bを第2のカニューレ330bから排出するよう構成されている。挿入器具は、さらに、第1及び第2のプッシュロッド330a及び330bのうちの1つの間においてプランジャに選択的に係合するために作動可能な選択的プランジャ係合アセンブリ502を有することができる。つまり、プランジャ316を、第1のプッシュロッド330aに並進可能に結合することができ、これにより、プランジャ316の遠位の並進が、プッシュロッド330aを遠位に並進させ、第1のアンカ本体28aを各々の第1のカニューレ330aから排出する。プランジャ316を、第2のプッシュロッド330bに並進可能に結合することができ、これにより、プランジャ316の遠位の並進が、プッシュロッド330bを遠位に並進させ、第2のアンカ本体28bを各々の第1のカニューレ330bから排出する。
ここで図30A〜図30Cを参照すると、往復運動アセンブリ500は、第1のカニューレ310aに取り付けられかつ第1のカニューレ310aに並進可能に固定された歯付第1ラック504aのような、第1の力伝達部材を有する。第1のラック504aは、望みに応じて、第1のカニューレ310aと一体であるか、第1のカニューレ310aに別個に取り付けることができる。例示した実施の形態によれば、第1のラック504aは、第1のカニューレ310aから近位に延びている。往復運動アセンブリ500は、さらに、第2のカニューレ310bに取り付けられかつ第2のカニューレ310bに並進可能に固定された第2の歯付ラック504bのような、第2の力伝達部材を有することができる。第2のラック504bは、望みに応じて、第2のカニューレ310bと一体であるか、又は第2のカニューレ310aに別個に取り付けることができる。例示した実施の形態によれば、第2のラック504bは第2のカニューレ310bから近位に延びている。
往復運動アセンブリ500は、さらに、平歯車であることができる第1の歯車506aのような第3の力伝達部材を有することができ、第1の歯車506aは第1のラックと噛み合い、第1の歯車506aの回転が第1のラック504aを駆動して、例えば近位又は遠位に、実質的に直線的に並進させる。第1のカニューレ310aは第1のラック504aと一緒に並進する。往復運動アセンブリ500は、さらに、平歯車であることができる第2の歯車506bのような第4の力伝達部材を有することができ、第2の歯車506bは第2のラック504bと噛み合い、第2の歯車506bの回転が第1のラック504aを駆動して、例えば近位又は遠位に、実質的に直線的に並進させる。第2のカニューレ310bは第2のラック504bと一緒に並進する。さらに、第1及び第2の歯車506a及び506bは噛み合い、各々の回転軸線508a及び508bに沿って第1の回転方向での第1及び第2の歯車506a及び506bの回転が、第1及び第2の歯車506a及び506bのうちの他方を駆動し、第1の回転方向とは反対の第2の回転方向に回転させる。第1及び第2の歯車506a及び506bを、歯車506a及び506bが回転する際に回転軸線508a及び508bが定置のままであるように、ケーシング308に支持することができる。
第2のラック504bは、ケーシング308から延びたハンドル508bを有することができる。手術中、例えば第1のカニューレ310aが第2のカニューレ310bに対して遠位に延びている時、ハンドル508bを遠位に駆動することができ、これは、第2のカニューレ310b及び第2のラック504bを遠位に並進させ、これにより、回転方向に沿って第2の歯車506bを回転させる。第2の歯車506bは第1の歯車506aを駆動し、反対の回転方向に沿って回転させ、これは、第1のカニューレ310aをケーシング308に向かって近位に並進させる。つまり、第2のカニューレ310bが遠位に駆動される際、往復運動アセンブリは、第1のカニューレ310を反対方向に、例えば例示したように近位に駆動する。
第2のカニューレ310bが第1のカニューレ310aに対して遠位に延びている時、ハンドル508bを近位に駆動することができ、これは、第2のカニューレ310b及び第2のラック504bを近位に並進させ、これにより、回転方向に沿って第2の歯車506bを回転させる。第2の歯車506bは第1の歯車506aを駆動し、反対の回転方向に沿って回転させ、これは、第1のカニューレ310aをケーシング308aから離れるように遠位に並進させる。つまり、第2のカニューレ310bが近位に駆動される際、往復運動アセンブリは、第1のカニューレ310aを反対方向に、例えば例示したように遠位に駆動する。
ハンドル508bはフック510を有することができる。フック510は、ハンドル508の遠位の並進、ひいては第2のラック504bの遠位の並進をも防止するセーフティキャッチを提供するために、ケーシング308に掛合する。フック510は、第2のカニューレ310bが引っ込められ、第1のカニューレ310aが延長されかつ第2のカニューレ310bに対して遠位に配置された時に、ケーシング308に掛合するよう構成することができる。
ここで図30C及び図30Dを参照すると、選択的プランジャ係合アセンブリ502は、ケーシング308によって支持された軌道512を有する。軌道512は、ケーシング308の内壁内へ半径方向外方に延びることができる。軌道は、第1の部分512aを有し、この第1の部分512aは、実質的に長手方向に、かつカニューレ310a及び310bとプッシュロッド330a及び330bとに対して平行に延びている。軌道は、さらに、第2の部分512bを有し、この第2の部分512bは、第1の部分512a、例えば第1の部分512aの近位端部から延びており、かつ第1の部分512aから近位にかつ外方へ、例えば横方向に外方へ延びている。つまり、第2の部分512bは第1の部分512aに対してずれていると言うことができる。例示した実施の形態によれば、第2の部分512bは第1の部分512aに対して角度方向でずれている。
第1及び第2のアンカのうちの各々の1つを挿入器具から排出するために、第1及び第2のプッシュロッド330a及び330bのうちの選択された1つを第1及び第2のカニューレ310a及び310bのうちの各々の1つにおいて遠位に駆動するために、プランジャ316は、軌道512に乗るように構成されており、軌道512に沿って遠位に可動である。例示した実施の形態によれば、第1及び第2のプッシュロッド330a及び330bは、第1及び第2の係合部材514a及び514bを支持している。係合部材514a及び514bは、第1及び第2のカニューレ310a及び310bが往復運動するように駆動される際に間隙を提供するために互いに間隔を置いて配置することができる。第1及び第2のプッシュロッド330a及び330bは第1及び第2のカニューレ310a及び310b内へ延びているので、カニューレ310a及び310bの往復移動の間にプッシュロッド330a及び330bは同様に往復運動するように駆動されることを認識すべきである。
プランジャ316は、付勢部材516を支持しており、この付勢部材516は、プランジャ316が第1の軌道部分512aに配置されている時に係合部材514aの各々と長手方向で整合させられる。プランジャ316は、さらに、フォロア518を支持しており、このフォロア518は、軌道512に乗り、かつプランジャが近位及び遠位に駆動される際にプランジャ316の走行経路を案内するための寸法及び形状を有する。プランジャ316は、例えばケーシング308から近位に延びる近位端部を有することができる。つまり、プランジャ316を、第1の軌道部分512aに沿って遠位に及び第1の軌道部分512aに沿って近位に駆動することができる。プランジャを、さらに、第2の軌道部分512bに沿って近位に駆動することができ、これは、付勢部材516を、係合部材514a及び514bとの長手方向整合からずらすように移動させる。つまり、カニューレ310a及び310b及び各々のプッシュロッド330a及び330bは、係合部材514a及び514bが互いに干渉することなく、さらに、係合部材514a及び514bがプランジャ316の付勢部材516と干渉することなく、往復運動するように移動することができる。
各々のカニューレのうちの一方、例えば第1のカニューレ310aからアンカ本体のうちの一方を排出することが望まれる場合、第1のプッシュロッド330aをプランジャ316と整合させて配置することができる。例えば、各々の係合部材514aを第1の軌道部分512aの近位端部の遠位に位置決めするために、往復運動アセンブリ500を望みに応じて作動させることができる。したがって、プランジャ316を軌道512に沿って遠位に駆動することができる。プランジャ512が第1の軌道部分512aに沿って遠位に走行すると、付勢部材516は係合部材514aに係合し、プッシュロッド330aを各々のカニューレ310aにおいて遠位に駆動し、これにより、上述のようにアンカ本体をカニューレ310aから排出する。
第2のアンカ本体を第2のカニューレ310bから排出することが望まれると、付勢部材516が第1及び第2のプッシュロッド330a及び330bの係合部材514a及び514bとの長手方向整合から外れるまでプランジャ316を第2の軌道部分512bへ近位に駆動することができる。次いで、第2のカニューレ310b及び第2のプッシュロッド330bを遠位に駆動するために往復運動アセンブリ500を作動させることができ、これは、第1の係合部材514aが第1の軌道部分512aの近位端部の近位に配置されかつ第2の係合部材514bが第1の軌道部分512aの近位端部の遠位に配置されるまで、第1のカニューレ310a及び第1のプッシュロッド330aを近位に並進させる。つまり、第2のカニューレ310bは、第1のカニューレ310aに対して遠位に配置される。次いで、プランジャ316を遠位に駆動することができ、これは、付勢部材516を第2の係合部材514bと係合させ、第2の係合部材514bは、第2のアンカを挿入器具から排出するために第2のプッシュロッド330bを第2のカニューレ330bにおいて遠位に駆動する。
ここで図31を参照すると、様々な挿入器具300は遠位排出ポート442を有するように説明されているが、挿入器具300は、遠位排出ポート442の代わりに側部排出ポート318を形成することができる。例えば、側部排出ポート318は、先端部311に対して近位の位置においてカニューレ310の遠位部分を半径方向に貫通して延びるスロットとして形成することができる。側部排出ポート318は、第1及び第2のアンカ本体28a及び28bの各々の最大横断面寸法と少なくとも実質的に等しいか又はそれよりも大きな周方向寸法を形成することができ、これにより、アンカ本体28a及び28bは、側部排出ポート318を通過するための寸法を有する。さらに、側部排出ポート318は、第1及び第2のアンカ本体28a及び28bの各々の長手方向長さと実質的に等しいか又はそれよりも大きな長手方向長さを形成することができる。例えば、第1及び第2のアンカ本体28a及び28bが側部排出ポート318から排出される際に第1及び第2のアンカ本体28a及び28bが長手方向軸線302に対して角度方向にずれているならば、側部排出ポート318の長手方向長さを第1及び第2のアンカ本体28a及び28bの各々の長手方向長さよりも僅かに小さくすることができる。
先端部311は、近位端部における斜面372を形成することができる。つまり、斜面372は、側部排出ポート318の遠位端部に配置することができ、長手方向軸線302と実質的に整合させることができる。斜面372は、テーパした排出面374を形成することができ、このテーパした排出面374は、遠位に延びながら、側部排出ポート318に向かって半径方向外方へ角度づけられている。したがって、プランジャ316、プッシュチューブ334、及びカラー332が第1の位置から第2の位置へ移動する際にプラグ314が第2のアンカ本体28bをカニューレ310の延在する開口312から排出面374へ遠位に付勢するので、第2のアンカ本体28cは排出面374に沿って乗り上げ、これは、第2のアンカ本体28bを矢印Bに沿って側部排出ポート318から出るように方向付け、これにより、第2の目標解剖学的位置24b(図1A)において第2のアンカ本体28bを挿入器具300から排出する。側部排出ポート318の少なくとも遠位部分は解剖学的構造24の背後に配置されている時、第2のアンカ本体28bは、図1Aにさらに示すように、解剖学的構造24の背後の位置において挿入器具300から排出される。プッシュロッド330及びプッシュチューブ334が解離させられた時にプラグ314が先端部311の近位でこの先端部311に隣接するように構成することができる。したがって、プッシュチューブ334に対するプッシュロッド330の並進により、プッシュロッドは、第1のアンカ28aを、上述の形式でプラグ314の斜面378に沿って、側部排出ポート318から排出する。
例示した実施の形態に関連して説明した実施の形態は、例示として示されており、したがって、本発明は、開示された実施の形態に限定されることを意図されていない。さらに、ここに記載されたあらゆる実施の形態に関連した様々な構造、特徴及び方法は、そうでないことが示されない限り、ここに記載されたあらゆる他の実施の形態に当てはまることができる。例えば、そうでないことが示されない限り、ここに記載されたあらゆる挿入器具は、あらゆる適切な択一的な実施の形態に従ってここに記載された保持アセンブリ、ここに記載された又はあらゆる適切な択一的な実施の形態による切断アセンブリ、ここに記載されたタイプの又はあらゆる適切な択一的な実施の形態により構成されたスワップアセンブリ、ここに記載されたタイプの又はあらゆる適切な択一的な実施の形態により構成された往復運動アセンブリ、及び個々に記載されたタイプの又はあらゆる適切な択一的な実施の形態により構成された選択的なプランジャ係合アセンブリを有することができる。したがって、当業者は、本発明が、発明の思想及び範囲に含まれる、例えば添付の請求項によって示された全ての変更及び択一的な配列を含むことが意図されていることを認識するであろう。