JP5911427B2 - 流体管理システム - Google Patents
流体管理システム Download PDFInfo
- Publication number
- JP5911427B2 JP5911427B2 JP2012540412A JP2012540412A JP5911427B2 JP 5911427 B2 JP5911427 B2 JP 5911427B2 JP 2012540412 A JP2012540412 A JP 2012540412A JP 2012540412 A JP2012540412 A JP 2012540412A JP 5911427 B2 JP5911427 B2 JP 5911427B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- spike
- fluid
- holder
- management device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/16804—Flow controllers
- A61M5/16827—Flow controllers controlling delivery of multiple fluids, e.g. sequencing, mixing or via separate flow-paths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/007—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests for contrast media
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/1407—Infusion of two or more substances
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/1413—Modular systems comprising interconnecting elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/1414—Hanging-up devices
Description
a.ディスプレイ等の情報出力装置
b.タッチスクリーン又はキーボード等のユーザ入力装置
c.温度制御されたチャンバの温度
d.流体レベルセンサ
e.スパイク用の位置制御センサ
f.回転カルーセル用の位置制御センサ
g.FTSチューブに設けたバルブ
h.CM注入器との通信用の2方向データ移送システム、及び/又はコンピュータネットワーク
i.容器又は流体移送システム(FTS)に設けたデータストレージからデータを読み取るリーダ等の1方向データ移送システム
j.データストレージ
流体管理装置を提供する工程であって、前記流体管理装置は、流体を収容する少なくとも一つの容器を該容器の首部の開口端部を下方に向けた垂直状態で収容するように構成されており、前記容器はスパイクホルダを有し、前記スパイクホルダは該スパイクホルダに接続されたスパイクを前記容器ホルダに搭載されてスパイク位置にある前記容器の軸に整列させるように設けられて接続されているものと、
流体移送システムを提供する工程であって、前記流体移送システムは移送チューブを有し、前記移送チューブはスパイクに接続された第1端部と注入器に接続されるように構成された第2端部を有するものと、
少なくとも一つの容器を該容器の首部の開口端部を下方に向けた状態で前記流体管理装置に搭載する工程であって、前記首部の前記開口端部は隔壁によって覆われているものと、
前記スパイクを前記スパイクホルダに取り付けるとともに前記移送チューブの第2端部を注入器に取り付け工程と、
前記隔壁に前記スパイクを侵入させる工程と、
前記容器から流体を取り出す工程を含む。
以下に説明する第1実施例の流体管理システムは、予熱された造影剤(CM)と予熱されていない生理食塩水を造影剤が充填された容器(CM容器)又は生理食塩水が充填された容器(生理食塩水容器)から患者注入用CM注入器に自動的に供給するように構成されている。
〔中央電子制御システム〕
FMDのセンサや制御ユニットとの通信(以下に説明する。)には、独占的所有権で守られたソフトウェアを備えた中央電子制御システム(CECS)が使用される。CECSは、ユーザに情報を出力するために又はユーザの入力を受けるために、ユーザ装置インターフェイスに接続してもよい。特に、CECSは、すべてのチャンバの回転カルーセルと自動スパイクシステムと通信して駆動するように構成されている。CECSは、データ保存、許可された容器のデータストレージ手段と許可されたFTSとの間の一方向データ転送、および許可されたCM注入器との2方向データ転送を可能にする。
FMDの各温度制御されたチャンバ内でCM容器を約摂氏37度に予熱することは、強制対流と内部温度制御システムを通じて行われる。すなわち、温度制御された各チャンバの大気温度は独立して制御される。この特徴により、CMを患者に注入する前にユーザがCM容器を暖める必要が無くなる。好適な実施例において、温度制御機構は、一日の始めに処置が始まる前に、改良された始動処理が自動的に開始するように構成される。
温度制御された各チャンバには5つのCM容器が収容されているので、FMDは複数の患者に対するほぼ丸一日の処置についてサービスを提供することができる。CM容器(また、生理食塩水容器)は、種々の大きさをとり得る。容器ホルダは、それと共に使用される容器の大きさに応じて決められる。好ましくは、500mlのCMが充填された4つの容器と100mlのCMが充填された一つの容器が、温度制御されたチャンバのそれぞれに設けられる。一日の作業の終わりに、または、CM容器の推奨使用時間を越える長時間治療における休止と休止の間では、小容量のCM容器を使用することにより、不要にCM流体を浪費することがなくなる。スパイク後のCM容器に残存するCM流体の耐用期間は限られる。既存のCMの場合、推奨されている使用時間は約10時間である。したがって、新たな500mlのCM容器がその日の最後の処置に使用された場合、残存流体は明朝までに廃棄されなければならない。CM流体の効率的な廃棄管理が可能である。温度管理されていない各チャンバに500mlの生理食塩水が充填された生理食塩水容器を保管することで、約半日分の処置量をまかなえる。
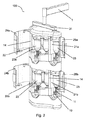
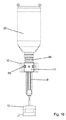
FMDがCMと生理食塩水をCM注入器に供給するためには、各容器の隔壁にFTSのスパイク11を挿入する。これを行うために、ユーザは、装着用及び取付用の機構(ガイドノッチ45、スライドレール55,ピン54,孔44)を介してFMD100のスパイクホルダ10にFTSのスパイク11を取り付ける必要がある。スパイクホルダ10は、容器隔壁に対してスパイク11が軸方向に良好に整列されるように設計されている。FMSが開始されると、チャンバには容器が補充され、温度制御チャンバが加熱され、中央電子制御システム(CECS)が自動スパイクシステム12と通信を行ってスパイク11を垂直上方に向けてスパイクホルダ10を駆動する。結果、スパイクが入口点を介して関連チャンバ、さらに容器隔壁に入る。これにより、シリコンゴムの蛇腹式シース43が押し潰され、スパイク上部42が容器隔壁に完全に入る。位置制御センサを用いて、CECSはスパイク11を所定距離だけ容器隔壁に押し込む。予め決められた距離に達すると、CECSは自動スパイクシステム12を停止し、スパイクホルダ10を容器隔壁に対する所定の垂直位置に保持する。
温度制御された各チャンバ内における回転カルーセル回転自動化を採用し、新たなCM容器にアクセスしてスパイクするように、該新たなCM容器にインデックスを付ける。CECSは、回転カルーセルを所望の位置に回転(インデックス)する歯付きモータを駆動するために利用される。回転カルーセルの角度位置が位置センサとCECSで監視される。したがって、任意の時間で、CECSは各CM容器の場所を確認できる。これにより、特定のCM容器をスパイクするためには如何なる角度まで回転カルーセルを回転するかを決定できる。
FMDと共に使用される容器(所謂、承認された容器)にはRFIDタグ(又はその他のデータ保存手段)が取り付けてある。これにより、CECSは、RFIDリーダ(または、その他のデータ保存手段に対応したリーダ)を有する状態表示装置を通じて、何時、何処に容器が補充されたかを知ることができる。容器にRFIDタグが無ければ通信が行うことができないため、容器に問い合わせることで、CECSは容器が存在しないことを認識する。その場合、CECSは視覚的又は聴覚的なエラーフィードバックをユーザに送り、対応する容器の保管場所を閉鎖してスパイクできないようにする。これは、CM注入器に対する供給のために、適正な流体及び承認された容器だけがFMD内に保管されることを保証する、大切な安全上の特徴である。
各容器のRFIDに記憶されたデータ(例えば、製造データ、流体処方等)は、RFIDリーダとCECSを通じて問い合わせることができるし、記憶することができる。このデータは、後に、CM注入器に送信されるか、移動記憶手段(すなわち、USBスティック)に記憶される。この特徴により、履歴管理(トレーサビィティ)が良くなる。
CM容器がスパイクされると、CECSを通じて計測タイマが作動され、CM容器がスパイクされたことをCECSに記録する。CM容器に対する推奨使用時間が経過し、それぞれのCM容器がまだ「エンプティ」となっていない場合、CECSはそれぞれのCMをロックアウトし、自動スパイクシステムと交信してCM容器からスパイクを取り除く。CM容器のRFIDタグに記録された固有コードが使用済みとしてCECSに記録される、及び/又は、スパイクされた時に有効寿命を越えているとしてCECSに記録されるので、温度制御されたチャンバ内にあるCM容器をユーザが後に再利用したり、それに補充したりすることが防止される。
実施例において、CM注入器に関連する情報(液体供給レベル、残留量、温度)は、CM注入器の主要ユーザインターフェイススクリーンに表示される。これは、FMDとCM注入器の間の直接的なデータ転送によって行われる。温度、どの容器がエンプティか、また、温度制御されたチャンバの推奨使用時間などの情報は、LEDを通じて表示されるか又はFMDのディスプレイスクリーンを通じて表示される。この特徴により、ユーザは、関連チャンバについて、FMD内の液レベルを直接監視できる。ユーザが視覚的に液レベルを見てどの容器に補充する必要があるかを確認するための二次的手段として、各チャンバドアに観察窓が設けられる。チャンバ内の容器がその時点でスパイクされていないことを条件に、ユーザはチャンバドアにアクセスして液を補充できる。温度制御されたチャンバのドアが開放されると、カルーセル駆動システムが解除され、ユーザが補充している間に回転カルーセルが自動的に動作するのを防止する。カルーセル駆動システムが解除されると、回転カルーセルは自由に回転できる。その結果、ユーザは、回転カルーセルを容易に回転し、素早く個々の容器にアクセスできる。温度制御されたチャンバのドアを閉じると、カルーセル駆動システムが再び係合し、自動的に回転カルーセルを駆動して使用できる。
FMSとCM注入器の間の双方向通信は、独自のソフトウェア通信プラットフォームを通じて行われる。これにより、ユーザは、CM注入器インターフェイスから直接に、FMDの複数機能を制御し観察できる。FMDとCMインジェクタの間のデータ転送は、限定的ではないが、以下のデータ転送方法を含む複数の転送手段を行うことができる。
・ワイヤケーブル−USB、LAN等
・ブルートゥース
・ワイヤレスネットワーク
各温度制御されたチャンバの回転カルーセルの下と自動スパイクシステムの上に、手動で移動可能なドリップトレイ13が配置される。これにより、先にスパイクされたCM容器隔膜からのCM流体の漏れが、機械内で捕らえられる。
以下に説明する、第2実施例に係るFMSは、CMが充填された容器(CM容器)から又は生理食塩水が充填された容器(生理食塩水容器)から患者に注入するために、予め加熱された造影剤(CM)と予め加熱された生理食塩水をCM注入器に自動的に供給するように構成されている。
FMD100:流体管理装置
FTS:流体移送システム
CM:造影剤
CECS:中央電子制御システム
1:天井アームアタッチメント
31:棒
5:温度制御されたチャンバ14のシャーシフレーム用のヒータ
2:主ギヤ
3:モータギヤ
4:アイドラーギヤ
5:アイドラーピン
61:アタッチメント
20a、20b:温度制御されたチャンバ
21a,21b:温度制御されていないチャンバ
22:CM容器
23:生理食塩水容器
24a,24b:温度制御されたチャンバのドア
25a,25b:温度制御されていないチャンバのドア
26:窓
27:カルーセル駆動シャフト
7:プレート(カルーセル)
18:プレート(生理食塩水ホルダ)
8:ワイヤ収容ラック
28:クリップ
13:ドリップトレイ
15:上部チャンバスパイクのチューブ
16:下部チャンバスパイクのチューブ
17:Yコネクタ
18:CM注入器のチューブ
9:リニアスライド
10:スパイクホルダ
11:スパイク
12:自動スパイクシステム
43:スパイク用シース
41:ベース
42:上部
44:孔
45:ガイドノッチ
54:ピン
55:スライドレール
200:FMD(第2実施例)
201:第1の温度制御されたチャンバ
202:第2の温度制御されたチャンバ
203:第1の温度制御されたチャンバの蓋
204:第2の温度制御されたチャンバの蓋
210:スパイクホルダ
211:スパイク
215:CECS用ハウジング
217:ディスプレイ
220:プリンタ
Claims (24)
- 注入用流体を患者に自動的に供給する流体管理装置(100)であって、
垂直回転軸を有する少なくとも一つの回転カルーセルと、
前記回転カルーセルに取り付けられるとともに、首部の開放端を下方に向けた状態で容器(22,23)を垂直に配置するように構成された、少なくとも2つの容器ホルダと、
スパイクホルダ(10)であって、前記回転カルーセルの下に設けられ、該スパイクホルダ(10)が前記容器ホルダに搭載されてスパイク位置にある容器(22,23)の軸に、スパイク(11)を軸方向に整列させるように向けられている、スパイクホルダ(10)と、
容器が最大使用時間に達したかどうか、および/またはスパイクが最大使用時間に達したかどうかを検出可能なCECSと、を備えており、
前記スパイクホルダ(10)は、リニアスライダ(9)に移動可能に設けられており、前記スパイクホルダ(10)が垂直方向にスライドできる、流体管理装置(100)。 - 2つの回転カルーセルを備えた、請求項1の流体管理装置(100)。
- 前記回転カルーセルに取り付けられていない、一つ又は複数、好ましくは2つの容器ホルダを備えた、請求項1又は2の流体管理装置(100)。
- 2つの回転カルーセルと、前記回転カルーセルに取り付けられていない2つの容器ホルダを備えた、請求項1の流体管理装置(100)。
- 最大で10個、好ましくは5個の容器ホルダが前記回転カルーセルに取り付けられている、請求項1〜4のいずれかの流体管理装置(100)。
- 前記回転カルーセルに取り付けられたすべての容器ホルダが同一の大きさの容器(22,23)を保持するように構成されているか、いくつかの容器ホルダが他の容器ホルダとは異なる大きさの容器(22,23)を保持するように構成されている、請求項1〜5のいずれかの流体管理装置(100)。
- 一つの容器ホルダが他の容器よりも小さな大きさの容器(22,23)を保持するように構成されている、請求項6の流体管理装置(100)。
- 各回転カルーセルが個々のチャンバ(20a,20b)に設けられている、請求項1〜7のいずれかの流体管理装置(100)。
- 前記回転カルーセルに取り付けられていない各容器ホルダが別々のチャンバ(21a、21b)に設けられている、請求項3又は4の流体管理装置(100)。
- すべてのチャンバ(20a,20b,21a,21b)がシャーシフレームワーク(14)に設けられている、請求項8又は9の流体管理装置(100)。
- 前記チャンバ(20a,20b,21a,21b)の少なくとも一つが温度制御されている、請求項8〜10のいずれかの流体管理装置(100)。
- 各チャンバ(20a,20b,21a,21b)は、個別のヒンジされた蓋又はドア(24a,24b,25a,25b)をあけることによってアクセスできる、請求項8〜11のいずれかの流体管理装置(100)。
- 前記回転カルーセルの回転と前記スパイクホルダ(10)の移動を制御するように構成された中央電子制御システムを備えている、請求項1〜12のいずれかの流体管理装置(100)。
- それぞれがスパイク(11)に接続された少なくとも2つの第1の端部と、それぞれが前記第1の端部に対応する少なくとも2つの第2の端部を有する第1の移送チューブ(15,16)と、
2つの入口開口と一つの出口開口を少なくとも有し、前記移送チューブ(15,16)の前記第2の端部が前記入口開口に接続されているマニホールド(17)と、
第1の端部で前記マニホールド(17)の前記出口開口に接続された第2の移送チューブ(18)と、
前記第1の移送チューブの第1の端部と第2の端部の間にそれぞれ設けられたバルブを備えた流体移送システムであって、
前記流体移送システムはまた、
スパイクホルダ(10)であって、該スパイクホルダ(10)が容器ホルダに搭載されてスパイク位置にある容器(22,23)の軸に、スパイク(11)を軸方向に整列させるように向けられている、スパイクホルダ(10)と、
容器が最大使用時間に達したかどうか、および/またはスパイクが最大使用時間に達したかどうかを検出可能なCECSと、を有し、
前記スパイクホルダ(10)は、該スパイクホルダ(10)が垂直方向に移動できるように、リニアスライダ(9)に移動可能に支持されている、流体移送システム。 - 前記第2の移送チューブ(18)の前記第2の端部が注入器に接続されるように構成されている、請求項14の流体移送システム。
- 前記スパイク(10)は通気孔付きスパイクである、請求項14又は15の流体移送システム。
- 前記スパイク(10)はシース(43)で覆われている、請求項14〜16のいずれかの流体移送システム。
- 前記流体移送システムはさらに、流体移送システムの一意識別子を保管するデータ保管手段を備えている、請求項14〜17のいずれかの流体移送システム。
- 患者に注入液を自動的に供給する流体管理システムであって、請求項1〜14のいずれかの流体管理装置(100)と、請求項14〜18のいずれかの流体移送システムと、流体注入器を備えた流体管理システム。
- 注入液を自動的に供給する方法であって、
流体管理装置(100)を提供する工程であって、前記流体管理装置は、流体を収容する少なくとも一つの容器(22,23)を該容器の首部の開口端部を下方に向けた垂直状態で収容するように構成されており、且つスパイクホルダ(10)を有し、前記スパイクホルダは該スパイクホルダに接続されたスパイク(11)を容器ホルダに搭載されてスパイク位置にある前記容器の軸に整列させるように設けられて接続されており、前記スパイクホルダ(10)は、垂直方向にスライドできるようにリニアスライダ(9)に設けられており、前記流体管理装置は、容器が最大使用時間に達したかどうか、および/またはスパイクが最大使用時間に達したかどうかを検出可能なCECSを含んでいる、流体管理装置(100)を提供する工程と、
流体移送システムを提供する工程であって、前記流体移送システムは移送チューブ(15,16,18)を有し、前記移送チューブはスパイク(11)に接続された第1端部と注入器に接続されるように構成された第2端部を有する、流体移送システムを提供する工程と、
少なくとも一つの容器(22,23)を該容器の首部の開口端部を下方に向けた状態で前記流体管理装置(100)に搭載する工程であって、前記首部の前記開口端部は隔壁によって覆われている、容器(22,23)を前記流体管理装置(100)に搭載する工程と、
前記スパイク(11)を前記スパイクホルダ(10)に取り付けるとともに前記移送チューブ(15,16,18)の第2端部を注入器に取り付ける工程と、
前記隔壁に前記スパイク(11)を侵入させる工程と、
前記容器(22,23)から流体を取り出す工程を含む、方法。 - 前記スパイク(11)を前記容器(22,23)の隔壁から引き抜く工程を有する、請求項20の方法。
- 前記スパイク(11)を前記隔壁から引き抜く工程は、スパイクされた前記容器(22,23)が空であるか又は前記容器(22,23)の最大使用時間に達したか若しくは前記スパイク(11)の最大使用時間に達したかときに起動される信号に応答して行われる、請求項21の方法。
- 少なくとも2つの容器(22,23)が前記流体管理装置(100)に搭載されている、請求項20〜22のいずれかの方法。
- 前記流体管理装置(100)はさらに、前記容器(22)をそれぞれ前記スパイクホルダ(10)に対して軸方向に整列させる手段を有し、
前記方法はさらに、
第2の容器(22)を、前記スパイクホルダ(20)と軸方向に整列する位置に移動し、
前記スパイク(11)を前記第2の容器(22)の隔壁に通し、
前記第2の容器(22)から流体を取り出す、請求項23の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09177313 | 2009-11-27 | ||
| EP09177313.5 | 2009-11-27 | ||
| PCT/EP2010/068097 WO2011064240A1 (en) | 2009-11-27 | 2010-11-24 | Fluid management system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013512017A JP2013512017A (ja) | 2013-04-11 |
| JP2013512017A5 JP2013512017A5 (ja) | 2013-11-14 |
| JP5911427B2 true JP5911427B2 (ja) | 2016-04-27 |
Family
ID=43618211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012540412A Expired - Fee Related JP5911427B2 (ja) | 2009-11-27 | 2010-11-24 | 流体管理システム |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US9555189B2 (ja) |
| EP (1) | EP2504048A1 (ja) |
| JP (1) | JP5911427B2 (ja) |
| KR (1) | KR101798253B1 (ja) |
| CN (1) | CN102740904B (ja) |
| AU (1) | AU2010323212B2 (ja) |
| CA (1) | CA2781810A1 (ja) |
| IL (1) | IL219852A (ja) |
| MX (1) | MX346340B (ja) |
| WO (1) | WO2011064240A1 (ja) |
| ZA (1) | ZA201203809B (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101798253B1 (ko) * | 2009-11-27 | 2017-11-15 | 바이엘 인텔렉쳐 프로퍼티 게엠베하 | 유체 관리 시스템 |
| US9080707B2 (en) | 2013-02-12 | 2015-07-14 | Bayer Medical Care Inc. | Intelligent contrast warmer and contrast holder |
| US20150374585A1 (en) * | 2014-06-30 | 2015-12-31 | Carefusion 303, Inc. | System and method for compounding medication |
| CN104784771B (zh) * | 2015-04-14 | 2018-12-25 | 深圳市永福康科技有限公司 | 一种智能输液装置 |
| WO2018009498A1 (en) | 2016-07-06 | 2018-01-11 | Bayer Healthcare Llc | Contrast heating system with in-line contrast warmer |
| US11376360B2 (en) * | 2016-07-18 | 2022-07-05 | Bayer Healthcare Llc | Fluid injector and patient set therefor |
| US10192233B2 (en) * | 2017-02-22 | 2019-01-29 | Arch Holdings, Lp | System and method for media trade-in |
| CN106880886B (zh) * | 2017-03-30 | 2020-01-10 | 青岛大学附属医院 | 一种输液自动换瓶装置 |
| US10430767B2 (en) | 2017-05-24 | 2019-10-01 | Arch Holdings, Lp | Media life cycle management system |
| CN107281579B (zh) * | 2017-06-09 | 2023-09-29 | 深圳文健医疗科技有限公司 | 一种无菌状态下的智能输液装置 |
| CN111569187A (zh) * | 2020-05-30 | 2020-08-25 | 严高超 | 输液架 |
| CN111658880A (zh) * | 2020-06-19 | 2020-09-15 | 徐柳 | 一种具有自动换液功能的输液架 |
| US11806465B2 (en) | 2021-06-24 | 2023-11-07 | Johnson & Johnson Surgical Vision, Inc. | Accurate irrigation rate measurement system and method |
| CN113750314B (zh) * | 2021-09-14 | 2023-04-14 | 圣鼎制药机械(嘉兴)有限公司 | 一种自动换瓶输液装置 |
| WO2023170680A1 (en) | 2022-03-08 | 2023-09-14 | Equashield Medical Ltd | Fluid transfer station in a robotic pharmaceutical preparation system |
| US11851221B2 (en) * | 2022-04-21 | 2023-12-26 | Curium Us Llc | Systems and methods for producing a radioactive drug product using a dispensing unit |
Family Cites Families (74)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2388111A (en) * | 1944-04-07 | 1945-10-30 | Marvin Makransky | Sanitary fluid dispensing device |
| CA940891A (en) * | 1970-04-08 | 1974-01-29 | Edward R. Tascher | Medicament filling unit |
| US4595562A (en) * | 1981-07-20 | 1986-06-17 | American Hospital Supply Corporation | Loading and transfer assembly for chemical analyzer |
| US4568345A (en) * | 1982-09-13 | 1986-02-04 | Baxter Travenol Laboratories, Inc. | Container and associated cap assembly for plasma collection and the like |
| US4508123A (en) * | 1983-06-01 | 1985-04-02 | American Hospital Supply Corporation | Thermodilution injectate assembly |
| US4879915A (en) * | 1987-03-17 | 1989-11-14 | Spencer R Wilson | Sample injection means |
| US4651574A (en) * | 1985-04-05 | 1987-03-24 | Spencer R Wilson | Sample injection means |
| US4730435A (en) * | 1986-04-07 | 1988-03-15 | Aqua-Chem, Inc. | Sterile docking system for filling IV bags |
| US4842028A (en) * | 1987-05-13 | 1989-06-27 | Baxter International Inc. | Fluid transfer apparatus |
| US5229074A (en) * | 1988-07-25 | 1993-07-20 | Precision Systems, Inc. | Automatic multiple-sample multiple-reagent chemical analyzer |
| US5109894A (en) * | 1988-11-14 | 1992-05-05 | Mcgregor Harold R | Vertical bottom-fill auger assembly |
| US6436349B1 (en) * | 1991-03-04 | 2002-08-20 | Bayer Corporation | Fluid handling apparatus for an automated analyzer |
| US6498037B1 (en) * | 1991-03-04 | 2002-12-24 | Bayer Corporation | Method of handling reagents in a random access protocol |
| US5646049A (en) * | 1992-03-27 | 1997-07-08 | Abbott Laboratories | Scheduling operation of an automated analytical system |
| US5376313A (en) * | 1992-03-27 | 1994-12-27 | Abbott Laboratories | Injection molding a plastic assay cuvette having low birefringence |
| US5479969A (en) * | 1992-08-19 | 1996-01-02 | British Nuclear Fuels Plc | Apparatus for dispensing substances which are biologically hazardous |
| SG49695A1 (en) * | 1992-10-15 | 1998-06-15 | Gen Hospital Corp | An infusion pump with an electronically loadable drug library |
| CN2161314Y (zh) * | 1993-06-16 | 1994-04-13 | 王国群 | 自动信号壁式输液架 |
| US5502944A (en) * | 1993-12-03 | 1996-04-02 | Owen Healthcare, Inc. | Medication dispenser system |
| US5522512A (en) * | 1994-05-09 | 1996-06-04 | Merck & Co., Inc. | System and method for automatically feeding, inspecting and diverting tablets for continuous filling of tablet containers |
| US7267666B1 (en) * | 1995-04-20 | 2007-09-11 | Acist Medical Systems, Inc. | Angiographic injector system with multiple processor redundancy |
| CA2227973C (en) * | 1995-08-25 | 2007-01-16 | Debiotech S.A. | Continuously operating infusion device and method |
| US5954668A (en) * | 1996-06-14 | 1999-09-21 | Medrad, Inc. | Extravasation detector using microwave radiometry |
| US5911252A (en) * | 1997-04-29 | 1999-06-15 | Cassel; Douglas | Automated syringe filling system for radiographic contrast agents and other injectable substances |
| US5935523A (en) * | 1997-05-29 | 1999-08-10 | Medical Laboratory Automation, Inc. | Apparatus for accessing a sealed container |
| US6070761A (en) * | 1997-08-22 | 2000-06-06 | Deka Products Limited Partnership | Vial loading method and apparatus for intelligent admixture and delivery of intravenous drugs |
| US5902298A (en) * | 1997-11-07 | 1999-05-11 | Bracco Research Usa | Medicament container stopper with integral spike access means |
| US6006946A (en) * | 1997-12-05 | 1999-12-28 | Automated Prescriptions System, Inc. | Pill dispensing system |
| US6037598A (en) * | 1998-01-28 | 2000-03-14 | Tetra Laval Holdings & Finance, Sa | Arrangement on an ultraviolet sterilization system |
| DE1075328T1 (de) * | 1998-05-01 | 2001-10-11 | Ammann Kelly G | Automatische diagnostische analysevorrichtung und -verfahren |
| US5921419A (en) * | 1998-05-04 | 1999-07-13 | Bracco Research Usa | Universal stopper |
| US6148877A (en) * | 1999-04-22 | 2000-11-21 | Bethke; Steven D. | Fluid filling system with fill time optimization |
| US6418877B1 (en) | 2000-06-15 | 2002-07-16 | James C. Fredericks | Jetter cup |
| US6360794B1 (en) * | 2000-12-19 | 2002-03-26 | Bechtel Bwxt Idaho, Llc | Apparatus and method for delivering a fluid to a container |
| GB0108213D0 (en) | 2001-04-02 | 2001-05-23 | Glaxo Group Ltd | Medicament dispenser |
| US20030229309A1 (en) * | 2001-06-01 | 2003-12-11 | Mitchell Babkes | Inner lumen anti-free flow device |
| US6604903B2 (en) * | 2001-11-30 | 2003-08-12 | Forhealth Technologies, Inc. | Automated drug vial safety cap removal |
| US6616771B2 (en) * | 2001-11-30 | 2003-09-09 | Forhealth Technologies, Inc. | Method and system for cleaning and reusing a cannula |
| US6877530B2 (en) * | 2002-12-03 | 2005-04-12 | Forhealth Technologies, Inc. | Automated means for withdrawing a syringe plunger |
| US7117902B2 (en) * | 2002-12-03 | 2006-10-10 | Forhealth Technologies, Inc. | Automated means of storing, dispensing and orienting injectable drug vials for a robotic application |
| JP2006522658A (ja) * | 2003-04-08 | 2006-10-05 | メドラッド インコーポレーテッド | 流体運搬システム、流体運搬装置、及び危険性流体を搬送する方法 |
| US7494472B2 (en) * | 2003-12-23 | 2009-02-24 | Windy Hill Medical, Inc. | Ductal lavage catheter having an off-axis tip |
| RU40893U1 (ru) | 2003-12-30 | 2004-10-10 | ЗАО "Научприбор" | Устройство ввода пробы для жидкостного хроматографа |
| TWI238715B (en) * | 2004-02-06 | 2005-09-01 | Shr Ji Tau | Medicament dispensing and injecting system with radiation protection |
| US7343943B2 (en) * | 2004-05-13 | 2008-03-18 | Forhealth Technologies, Inc. | Medication dose underfill detection system and application in an automated syringe preparing system |
| US7128105B2 (en) * | 2004-04-07 | 2006-10-31 | Forhealth Technologies, Inc. | Device for reconstituting a drug vial and transferring the contents to a syringe in an automated matter |
| US7163031B2 (en) * | 2004-06-15 | 2007-01-16 | Mallinckrodt Inc. | Automated dispensing system and associated method of use |
| US7017623B2 (en) * | 2004-06-21 | 2006-03-28 | Forhealth Technologies, Inc. | Automated use of a vision system to unroll a label to capture and process drug identifying indicia present on the label |
| ITBO20040630A1 (it) * | 2004-10-14 | 2005-01-14 | Marchesini Group Spa | Macchina per il riempimento in continuo di contenitori con prodotti liquidi |
| JP2008525125A (ja) * | 2004-12-22 | 2008-07-17 | インテリジェント ホスピタル システムズ リミテッド | 自動調剤混合システム(apas) |
| US7575567B2 (en) * | 2005-01-31 | 2009-08-18 | Simpkins Dale H | Multiple medication IV pump |
| CN101187962A (zh) * | 2005-04-06 | 2008-05-28 | 马林克罗特公司 | 管理有关医用液体及其容器的信息的系统与方法 |
| KR101373220B1 (ko) | 2005-09-14 | 2014-03-11 | 어시스트 메디칼 시스템즈, 인크. | 의료용 유체 주입 시스템 |
| US20070110637A1 (en) * | 2005-11-11 | 2007-05-17 | Phelps David Y | Automated rotary synthesizer |
| US20070140925A1 (en) * | 2005-11-11 | 2007-06-21 | Phelps David Y | Automated chemical synthesizer and method for synthesis using same |
| US7931859B2 (en) * | 2005-12-22 | 2011-04-26 | Intelligent Hospital Systems Ltd. | Ultraviolet sanitization in pharmacy environments |
| US7728711B2 (en) * | 2006-03-29 | 2010-06-01 | S&S X-Ray Products, Inc | Remotely or locally actuated refrigerator lock with temperature and humidity detection |
| JP4238257B2 (ja) * | 2006-06-28 | 2009-03-18 | 株式会社日立製作所 | 自動収尿装置 |
| US20080081000A1 (en) * | 2006-09-29 | 2008-04-03 | Macleod John | Integrity testing of vials for test sensors |
| US7900658B2 (en) * | 2006-10-20 | 2011-03-08 | Fht, Inc. | Automated drug preparation apparatus including drug vial handling, venting, cannula positioning functionality |
| US7814731B2 (en) * | 2006-10-20 | 2010-10-19 | Forhealth Technologies, Inc. | Automated drug preparation apparatus including a bluetooth communications network |
| WO2008058280A2 (en) * | 2006-11-09 | 2008-05-15 | Intelligent Hospital Systems Ltd. | Control of fluid transfer operations |
| US7935086B2 (en) * | 2006-12-14 | 2011-05-03 | L M M Global Innovations, Inc. | Multiple drug injection apparatus |
| US8763651B2 (en) * | 2008-02-01 | 2014-07-01 | Rescue Dose Ltd. | Dosage dispensing device |
| US8523797B2 (en) | 2008-05-08 | 2013-09-03 | Hospira, Inc. | Automated point-of-care fluid testing device and method of using the same |
| DE102008022835B3 (de) * | 2008-05-12 | 2009-10-22 | Torsten Dr. Matthias | Analysegerät |
| US20100217154A1 (en) * | 2009-02-26 | 2010-08-26 | Catholic Healthcare West (d/b/a) St. Joseph's Hospital and Medical Center | Automated blood draw system |
| US8386070B2 (en) * | 2009-03-18 | 2013-02-26 | Intelligent Hospital Systems, Ltd | Automated pharmacy admixture system |
| KR101798253B1 (ko) * | 2009-11-27 | 2017-11-15 | 바이엘 인텔렉쳐 프로퍼티 게엠베하 | 유체 관리 시스템 |
| US8924036B2 (en) * | 2010-06-10 | 2014-12-30 | Becton, Dickinson And Company | System and method for heating and insulating contrast media |
| US8539989B2 (en) * | 2010-08-30 | 2013-09-24 | Health Robotics, S.r.l. | Method for the production of pharmaceutical products |
| US8286671B1 (en) * | 2011-03-23 | 2012-10-16 | Saverio Roberto Strangis | Automated syringe filler and loading apparatus |
| US8807177B2 (en) * | 2011-05-18 | 2014-08-19 | Saverio Roberto Strangis | Automated syringe filler and loading apparatus |
| EP2864761B1 (en) * | 2012-06-22 | 2020-12-16 | Bio-Rad Laboratories, Inc. | Two station sample and washing system |
-
2010
- 2010-11-24 KR KR1020127016591A patent/KR101798253B1/ko active IP Right Grant
- 2010-11-24 AU AU2010323212A patent/AU2010323212B2/en not_active Ceased
- 2010-11-24 CN CN201080062638.8A patent/CN102740904B/zh not_active Expired - Fee Related
- 2010-11-24 MX MX2012006066A patent/MX346340B/es active IP Right Grant
- 2010-11-24 US US13/512,565 patent/US9555189B2/en not_active Expired - Fee Related
- 2010-11-24 JP JP2012540412A patent/JP5911427B2/ja not_active Expired - Fee Related
- 2010-11-24 WO PCT/EP2010/068097 patent/WO2011064240A1/en active Application Filing
- 2010-11-24 EP EP10781706A patent/EP2504048A1/en not_active Withdrawn
- 2010-11-24 CA CA2781810A patent/CA2781810A1/en not_active Abandoned
-
2012
- 2012-05-17 IL IL219852A patent/IL219852A/en not_active IP Right Cessation
- 2012-05-24 ZA ZA2012/03809A patent/ZA201203809B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CA2781810A1 (en) | 2011-06-03 |
| WO2011064240A1 (en) | 2011-06-03 |
| CN102740904B (zh) | 2017-05-03 |
| MX2012006066A (es) | 2012-09-21 |
| KR20120117795A (ko) | 2012-10-24 |
| EP2504048A1 (en) | 2012-10-03 |
| RU2012126599A (ru) | 2014-01-20 |
| US9555189B2 (en) | 2017-01-31 |
| IL219852A (en) | 2016-07-31 |
| AU2010323212B2 (en) | 2015-03-26 |
| MX346340B (es) | 2017-03-14 |
| US20120330152A1 (en) | 2012-12-27 |
| IL219852A0 (en) | 2012-07-31 |
| ZA201203809B (en) | 2013-08-28 |
| AU2010323212A1 (en) | 2012-06-14 |
| CN102740904A (zh) | 2012-10-17 |
| JP2013512017A (ja) | 2013-04-11 |
| KR101798253B1 (ko) | 2017-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5911427B2 (ja) | 流体管理システム | |
| JP7116830B2 (ja) | 自動薬物調合器のためのバイアルパックシステム | |
| AU2006244085B2 (en) | Medication safety system featuring a multiplexed RFID interrogator panel | |
| US11642284B2 (en) | Carousel for automatic drug compounder | |
| CA2757956C (en) | Multi-dose medical fluid injection system having patient-specific tubing set with use indicator | |
| US11547515B2 (en) | Mobile selection system and treatment carriage | |
| US20060178619A1 (en) | Multiple medication IV pump | |
| JP7096404B2 (ja) | 自動薬物調合器のためのチューブ管理構造 | |
| EP3600214B1 (en) | Dual-lumen tubing for automatic drug compounder | |
| KR102456948B1 (ko) | 약물을 합성하는 시스템 및 방법 | |
| US20150258275A1 (en) | Intravenous medication delivery system | |
| KR20230116797A (ko) | 유체 주입기 시스템용 유체 경로 구성요소의 보유를 위한 카세트 | |
| BR112012012466B1 (pt) | injetor de bomba, recipiente ou cartucho e sistema de troca de dados contendo um injetor de bomba | |
| RU2574162C2 (ru) | Система управления текучей средой | |
| JP2015528363A (ja) | 病院容器間で生物医学流体を移送するための器具 | |
| CN115916298A (zh) | 用于注射器帽的盒装载系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130930 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130930 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140805 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20141105 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20141112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141205 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20150226 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150615 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150903 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160229 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160329 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5911427 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |