JP5848105B2 - Conductive path of electric vehicle - Google Patents
Conductive path of electric vehicle Download PDFInfo
- Publication number
- JP5848105B2 JP5848105B2 JP2011256983A JP2011256983A JP5848105B2 JP 5848105 B2 JP5848105 B2 JP 5848105B2 JP 2011256983 A JP2011256983 A JP 2011256983A JP 2011256983 A JP2011256983 A JP 2011256983A JP 5848105 B2 JP5848105 B2 JP 5848105B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- cable
- sensor
- locking member
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000011347 resin Substances 0.000 claims description 40
- 229920005989 resin Polymers 0.000 claims description 40
- 239000003638 chemical reducing agent Substances 0.000 claims description 34
- 239000010687 lubricating oil Substances 0.000 claims description 32
- 239000003921 oil Substances 0.000 claims description 22
- 238000001514 detection method Methods 0.000 claims description 20
- 239000000725 suspension Substances 0.000 claims description 19
- 239000000463 material Substances 0.000 claims description 9
- 238000003780 insertion Methods 0.000 description 17
- 230000037431 insertion Effects 0.000 description 17
- 238000005452 bending Methods 0.000 description 10
- 230000005856 abnormality Effects 0.000 description 9
- 230000002093 peripheral effect Effects 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 5
- 239000007788 liquid Substances 0.000 description 5
- 238000001816 cooling Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000009413 insulation Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000012208 gear oil Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 230000001050 lubricating effect Effects 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images








Landscapes
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Details Of Indoor Wiring (AREA)
- Installation Of Indoor Wiring (AREA)
Description
この発明は、インホイールモータ駆動装置とインバータ装置とを電気的に接続する、電動車両の導電路に関する。 The present invention relates to a conductive path of an electric vehicle that electrically connects an in-wheel motor drive device and an inverter device.
電動車両において、いわゆるバネ下に配置されたインホイールモータ駆動装置と、車体に搭載されたインバータ装置とを接続する電動車両の導電路には、少なくても3相分の動力線があり、さらにモータの回転角を検出する角度センサのセンサケーブルや、インホイールモータ駆動装置の状態を検知するセンサケーブルがある。これら動力線やセンサケーブルは、サスペンションの挙動に追従できるように、インホイールモータ駆動装置とインバータ装置間で係止せずに、フリーの状態であった(特許文献1,2)。
In an electric vehicle, there is a power line for at least three phases in a conductive path of the electric vehicle that connects an in-wheel motor drive device arranged under a so-called spring and an inverter device mounted on the vehicle body. There are sensor cables for angle sensors that detect the rotation angle of a motor, and sensor cables that detect the state of an in-wheel motor drive device. These power lines and sensor cables were in a free state without being locked between the in-wheel motor drive device and the inverter device so as to follow the behavior of the suspension (
なお本件出願人は、インホイールモータ駆動装置において、荷重センサのケーブルの取り回し等について開示している(特願2010−220793)。
特許文献1には、車輪に配置したモータと、インバータとの間の動力線の接続手段が開示されている。特許文献2には、動力線とセンサケーブルとを一体にしたケーブル一体品を、樹脂製の部材で覆う構成が開示されている。
In addition, the present applicant has disclosed the handling of the cable of the load sensor in the in-wheel motor driving device (Japanese Patent Application No. 2010-220793).
インホイールモータ駆動装置とインバータ装置間において、その両端のみでモータケーブルを固定、支持した場合、モータケーブルの自重によって、モータケーブルの中央部が下がり、折れ曲がった部分では、車両の路面振動によるインホイールモータ駆動装置の上下振動によって、モータケーブルのシールド部分が摩耗し、シールド線に不具合を生ずるおそれがある。 When the motor cable is fixed and supported only at both ends between the in-wheel motor drive device and the inverter device, the motor cable's own weight lowers the central portion of the motor cable, and in the bent portion, in-wheel due to vehicle road vibration Due to the vertical vibrations of the motor drive device, the shield part of the motor cable may be worn, and the shield wire may be defective.
この発明の目的は、車輪に配置したモータの上下振動があっても、ケーブルの屈曲を小さく抑えて同ケーブルの不具合を防止することができる電動車両の導電路を提供することである。 An object of the present invention is to provide a conductive path of an electric vehicle that can suppress the bending of the cable and prevent the problem of the cable even when there is vertical vibration of the motor arranged on the wheel.
この発明の電動車両の導電路は、車輪を駆動するモータ、このモータの回転を減速する減速機、およびこの減速機の入力軸と同軸の出力部材によって回転される車輪用軸受を有するインホイールモータ駆動装置と、車両に搭載されるバッテリの直流電力を前記モータの駆動に用いる交流電力に変換するインバータを含むパワー回路部、およびこのパワー回路部を制御するモータコントロール部を有するインバータ装置とを備え、このインバータ装置が車両の車体に取付けられ、前記車体にサスペンションを介して前記インホイールモータ駆動装置が支持された電動車両において、前記モータとインバータとを接続する動力ケーブルを有し、インホイールモータ駆動装置の状態を検出するセンサを設け、このセンサから前記モータコントロール部まで延びるセンサケーブルを有し、車体またはサスペンションに、前記動力ケーブルおよびセンサケーブルの長手方向の一部を係止する係止部材が設けられ、
前記動力ケーブルおよびセンサケーブルを、それぞれ覆う樹脂部材が設けられ、
前記樹脂部材は、前記動力ケーブルおよび前記センサケーブルのうち、前記係止部材で係止されている部分以外を覆うことを特徴とする。
The conductive path of the electric vehicle according to the present invention includes an in-wheel motor having a motor for driving wheels, a speed reducer for reducing the rotation of the motor, and a wheel bearing rotated by an output member coaxial with the input shaft of the speed reducer. A drive device, a power circuit unit including an inverter that converts DC power of a battery mounted on a vehicle into AC power used for driving the motor, and an inverter device having a motor control unit that controls the power circuit unit. In an electric vehicle in which the inverter device is attached to a vehicle body and the in-wheel motor drive device is supported on the vehicle body via a suspension, the inverter device includes a power cable that connects the motor and the inverter, A sensor for detecting the state of the driving device is provided, and the motor control is performed from this sensor. Includes a sensor cable which extends to, the vehicle body or the suspension, a locking member for locking the longitudinal direction of a part of the power cable and the sensor cable is set vignetting,
Resin members are provided to cover the power cable and the sensor cable,
The resin member, the power cable and of the sensor cable, and wherein the this covering a portion other than the portion that is engaged with the locking member.
この明細書において、前記動力ケーブルおよびセンサケーブルを、単に「ケーブル」という場合がある。
この構成によると、車体またはサスペンションに、動力ケーブルおよびセンサケーブルの長手方向の一部を係止する係止部材を設けたため、車両の路面振動により車輪を駆動するモータの上下振動があっても、ケーブルの屈曲を係止部材で小さく抑えることができる。これにより、動力ケーブルやセンサケーブルのシールド線が屈曲動作による曲げ疲労で破損することを抑えることができる。係止部材は、ケーブルの長手方向の一部を係止するため、ケーブル全体としてサスペンションの挙動に追従することが可能となる。
In this specification, the power cable and the sensor cable may be simply referred to as “cable”.
According to this configuration, since the vehicle body or the suspension is provided with the locking member that locks a part of the longitudinal direction of the power cable and the sensor cable, even if there is vertical vibration of the motor that drives the wheels by road surface vibration of the vehicle, The bending of the cable can be kept small by the locking member. Thereby, it can suppress that the shield wire of a power cable or a sensor cable is damaged by the bending fatigue by bending operation. Since the locking member locks a part in the longitudinal direction of the cable, the entire cable can follow the behavior of the suspension.
前記動力ケーブルおよびセンサケーブルを、それぞれ覆う樹脂部材が設けられる。この場合、例えば、車両の走行時に路面等から跳上げられる異物等が、動力ケーブルおよびセンサケーブルに直接当たることを防止でき、ケーブルを保護することができる。
前記樹脂部材がコルゲートチューブであっても良い。コルゲートチューブは可撓性を有するため、ケーブルが屈曲しても同ケーブルに追従して撓み、コルゲートチューブ自体に割れ、欠け等を生じることなくケーブルを保護することができる。また円周方向の一部にスリットが形成されたコルゲートチューブを適用する場合、前記スリットを一時的に広げてこのコルゲートチューブをケーブルに着脱容易に設けることができる。
The power cable and the sensor cable, the resin member covering each eclipsed set. In this case, for example, it is possible to prevent foreign matter or the like jumped from the road surface or the like when the vehicle travels from directly hitting the power cable and the sensor cable, thereby protecting the cable.
The resin member may be a corrugated tube. Since the corrugated tube has flexibility, even if the cable is bent, the corrugated tube can follow the cable and bend, and the corrugated tube itself can be protected without being cracked or chipped. Moreover, when applying the corrugated tube in which the slit was formed in a part of the circumferential direction, the said corrugated tube can be easily provided in a cable by extending the said slit temporarily.
参考提案例として、前記係止部材は、樹脂部材と、樹脂部材に覆われている動力ケーブルおよびセンサケーブルとを共に係止しているものであっても良い。この場合、ケーブルの露出部分をより少なくでき、ケーブルを保護する効果を高めることができる。
前記樹脂部材は、動力ケーブルおよびセンサケーブルのうち、係止部材で係止されている部分以外を覆うものである。この場合、ケーブルを係止部材で係止した後、ケーブルの係止部材で係止されている部分以外を、樹脂部材で容易に覆うことができる。この樹脂部材が例えば経年劣化した場合には、ケーブルを係止部材で係止した状態で、樹脂部材のみ容易に交換することができる。
For reference Proposed Example, before Kigakaritome member includes a resin member may be one of the power cable and the sensor cable is covered with the resin member are both engaged locks. In this case, the exposed portion of the cable can be reduced, and the effect of protecting the cable can be enhanced.
The resin member covers a portion of the power cable and sensor cable other than the portion locked by the locking member . In this case, after the cable is locked by the locking member, portions other than the portion locked by the locking member of the cable can be easily covered with the resin member. For example, when the resin member has deteriorated over time, only the resin member can be easily replaced while the cable is locked by the locking member.
前記係止部材は複数の部材から構成されているものであっても良い。この構成によると、インバータ装置およびインホイールモータ駆動装置を車体に設けた後、ケーブルの長手方向の一部を、複数の部材からなる係止部材で容易に係止することができる。この場合、ケーブルを予め係止した状態で、インバータ装置およびインホイールモータ駆動装置を車体に設ける場合よりも、組立の作業効率を高めることができる。 The locking member may be composed of a plurality of members. According to this configuration, after the inverter device and the in-wheel motor drive device are provided on the vehicle body, a part of the cable in the longitudinal direction can be easily locked by the locking member composed of a plurality of members. In this case, it is possible to increase the assembly work efficiency as compared with the case where the inverter device and the in-wheel motor drive device are provided on the vehicle body with the cable locked in advance.
前記係止部材は、係止されるケーブルに作用する衝撃を吸収する緩衝材を含むものであっても良い。この場合、モータの上下振動に起因してケーブルの屈曲動作があっても、緩衝材により、ケーブルに作用する衝撃を吸収することができる。これにより、ケーブルの寿命を延ばすことが可能になる。 The locking member may include a cushioning material that absorbs an impact acting on the cable to be locked. In this case, even if the cable is bent due to the vertical vibration of the motor, the shock acting on the cable can be absorbed by the cushioning material. This makes it possible to extend the life of the cable.
前記インホイールモータ駆動装置と前記インバータ装置との間で、前記動力ケーブルおよび前記センサケーブルを係止する係止部材が2箇所以上設けられても良い。この場合、隣接する係止部材間でケーブルの屈曲を局所的に小さく抑えることができる。
前記センサが、前記車両の荷重を検出する荷重センサ、前記インホイールモータ駆動装置内の潤滑油量を検知する油量検知センサ、および前記モータのモータコイルの温度を検知する温度検知センサの少なくともいずれか1つを含むものであっても良い。これらセンサのケーブルの屈曲を係止部材で小さく抑えることで、シールド線の断線等を防止し得る。
Wherein between the in-wheel motor drive device and the inverter device, a locking member for locking said kinematic force cable and the sensor cable may be eclipsed set at two or more locations. In this case, it is possible to locally suppress the bending of the cable between the adjacent locking members.
Wherein the sensor, load sensor for detecting a load of the vehicle both, the Lee down wheel oil amount detection sensor detects the amount of lubricating oil in the motor driving apparatus, and a temperature sensor for detecting the temperature of the motor coil of the motor It may include at least one of them. By suppressing the bending of the cable of these sensors with a locking member, it is possible to prevent the shield wire from being broken.
前記インバータにおける前記動力ケーブルの取り出し部が、前記モータにおける前記動力ケーブルの引き出し部よりも、車両の高さ方向に高い位置に設けられても良い。例えば、インホイールモータ駆動装置に貯留された潤滑油が、モータにおける動力ケーブルの引き出し部から、この動力ケーブルを伝ってインバータにおける動力ケーブルの取り出し部まで不所望に漏れるおそれがなくなる。 Extraction of the dynamic force cable that put the inverter, the M o than lead portion of the dynamic force cable that put the data, may be kicked set at a higher position in the height direction of the vehicle. For example, the lubricant stored in the in-wheel motor drive device can be prevented from undesirably leaking from the power cable lead-out portion in the motor to the power cable take-out portion in the inverter through this power cable.
この発明の電動車両の導電路は、車輪を駆動するモータ、このモータの回転を減速する減速機、およびこの減速機の入力軸と同軸の出力部材によって回転される車輪用軸受を有するインホイールモータ駆動装置と、車両に搭載されるバッテリの直流電力を前記モータの駆動に用いる交流電力に変換するインバータを含むパワー回路部、およびこのパワー回路部を制御するモータコントロール部を有するインバータ装置とを備え、このインバータ装置が車両の車体に取付けられ、前記車体にサスペンションを介して前記インホイールモータ駆動装置が支持された電動車両において、前記モータとインバータとを接続する動力ケーブルを有し、インホイールモータ駆動装置の状態を検出するセンサを設け、このセンサから前記モータコントロール部まで延びるセンサケーブルを有し、車体またはサスペンションに、前記動力ケーブルおよびセンサケーブルの長手方向の一部を係止する係止部材が設けられ、前記動力ケーブルおよびセンサケーブルを、それぞれ覆う樹脂部材が設けられ、前記樹脂部材は、前記動力ケーブルおよび前記センサケーブルのうち、前記係止部材で係止されている部分以外を覆うため、車輪に配置したモータの上下振動があっても、ケーブルの屈曲を小さく抑えて同ケーブルの不具合を防止することができる。 The conductive path of the electric vehicle according to the present invention includes an in-wheel motor having a motor for driving wheels, a speed reducer for reducing the rotation of the motor, and a wheel bearing rotated by an output member coaxial with the input shaft of the speed reducer. A drive device, a power circuit unit including an inverter that converts DC power of a battery mounted on a vehicle into AC power used for driving the motor, and an inverter device having a motor control unit that controls the power circuit unit. In an electric vehicle in which the inverter device is attached to a vehicle body and the in-wheel motor drive device is supported on the vehicle body via a suspension, the inverter device includes a power cable that connects the motor and the inverter, A sensor for detecting the state of the driving device is provided, and the motor control is performed from this sensor. It includes a sensor cable which extends to, the vehicle body or a suspension, wherein the locking member for locking the longitudinal part of the power cable and the sensor cable is set vignetting, the power cable and the sensor cable, the resin member covering each provided, the resin member, of the power cable and the sensor cable, order to cover a portion other than the portion that is engaged with the locking member, even if the vertical vibration of the motor arranged on the wheel, the cable Bending can be suppressed to a small extent to prevent problems with the cable.
この発明の第1の実施形態を図1ないし図6と共に説明する。
この実施形態に係る導電路は電動車両に設けられる。図1に示すように、この電動車両は、インホイールモータ駆動装置58と、インバータ装置72とを備えている。インバータ装置72が車両の車体51に取付けられ、前記車体51にサスペンション8を介してインホイールモータ駆動装置58が支持されている。
図2に示すように、インホイールモータ駆動装置58は、車輪52(図1)を駆動するモータ1と、このモータ1の回転を減速する減速機2と、この減速機2の入力軸3と同軸の出力部材4によって回転される車輪用軸受5と、潤滑油供給機構40とを有する。車輪用軸受5とモータ1との間に減速機2を介在させ、車輪用軸受5で支持される駆動輪である車輪52のハブと、モータ1のモータ回転軸6とを同軸心上で連結してある。図1に示すように、減速機2を収納する減速機ハウジング7には、サスペンション8のアッパーアーム8aおよびロアーアーム8bが連結される。なお、この明細書において、インホイールモータ駆動装置58を車両に支持した状態で車両の車幅方向の外側寄りとなる側をアウトボード側と呼び、車両の中央寄りとなる側をインボード側と呼ぶ。
A first embodiment of the present invention will be described with reference to FIGS.
The conductive path according to this embodiment is provided in an electric vehicle. As shown in FIG. 1, the electric vehicle includes an in-wheel
As shown in FIG. 2, the in-wheel
図2に示すように、モータ1は、筒状のモータハウジング9に固定したモータステータ10と、モータ回転軸6に取り付けたモータロータ11との間にラジアルギャップを設けたラジアルギャップ型のIPMモータ(すなわち埋込磁石型同軸モータ)である。モータハウジング9には、軸方向に離隔して軸受12,13が設けられ、これら軸受12,13にモータ回転軸6が回転自在に支持されている。モータ回転軸6は、モータ1の駆動力を減速機2に伝達するものである。モータ回転軸6の軸方向中間付近部には、径方向外方に延びるフランジ部6aが設けられ、このフランジ部6aにロータ固定部材14を介してモータロータ11が取付けられている。
As shown in FIG. 2, the
モータ1には、モータステータ10とモータロータ11の間の相対回転角度を検出する角度センサ15が設けられる。角度センサ15は、モータステータ10とモータロータ11の間の相対回転角度を表す信号を検出して出力する角度センサ本体16と、この角度センサ本体16の出力する信号から角度を演算する角度演算回路17とを有する。角度センサ本体16は、例えば、モータ回転軸6の外周面に設けられる被検出部16aと、モータハウジング9に設けられ前記被検出部16aに例えば径方向に対向して近接配置される検出部16bとを有する。被検出部16aと検出部16bは軸方向に対向して近接配置されるものであっても良い。角度センサ15はレゾルバであっても良い。
The
このインホイールモータ駆動装置58には、インホイールモータ駆動装置内の潤滑油量を検知する油量検知センサSoが設けられている。この例では、モータハウジング9内に、減速機2の潤滑およびモータ1の冷却に用いられる潤滑油の潤滑油量を検知する油量検知センサSoが設けられている。この油量検知センサSoは、例えば、液体の水位制御に用いられる磁気式、光学式、電極式、または超音波式の液面レベルセンサから成る。この場合、油量検知センサSoで検知された値が定められた液面高さの下限値を下回っていないか判定する判定手段が、後述のモータコントロール部に設けられる。前記「定められた液面高さ」は、モータ1の駆動停止状態において、例えば、モータロータ11に掛かる程度、具体的には、モータロータ11の外周面が潤滑油に漬かる程度に定められている。なお、モータハウジング9内に油量検知センサSoを設ける構成に代えて、後述する減速機ハウジング7の下部に設けられる潤滑油貯留部に、油量検知センサSoを設けても良い。
The in-wheel
モータ1のモータコイル10aには、このモータコイル10aの温度を検知する温度検知センサSaが設けられている。前記温度検知センサSaとして例えばサーミスタが使用される。このサーミスタをモータコイル10aに接触固定することで、モータコイル10aの温度を検知し得る。温度検知センサSaで検知される温度に対し、例えば、複数の閾値が設定される。各閾値は、例えば、実験、シミュレーション等により、モータコイル10aに絶縁性能の劣化を生じさせる、モータコイル10aの温度および時間の関係に基づいて適宜に求められる。モータコイル10aに絶縁が生じたか否かは、モータ1に印加するモータ印加電圧に対するモータ電流値を、絶縁が生じていない基準値と比較することで判断し得る。なおモータ印加電圧は、後述の電流センサ85(図6)の後段等に設けられる図示外の電圧センサにより得られ、モータ電流値は、電流センサ85により得られる。
The
モータコントロール部79にはモータ電流制限手段Mca(図6)を設けられ、モータ電流制限手段Mcaは、各閾値で区分される温度領域毎に電流制限条件が設定される。具体的には、検出されるモータコイル10aの温度が比較的低温のときは、電流制限条件を緩和し、検出される温度が高温になる程、電流制限条件を強く規制する。このようにモータコイル10aの温度に応じて、モータ1の電流値をきめ細かく制限することで、モータコイル10aの絶縁性能の劣化を防止し得る。
The
図1に示すように、モータハウジング9の側面およびインボード側端面には、端子ボックス18A,18Bがそれぞれ設けられ、各端子ボックス18A,18B内には複数の端子がそれぞれ設けられている。図3に示すように、ハウジング側面の端子ボックス18Aにおけるインボード側の一端部には、モータ1を回転駆動する電力を供給する動力ケーブル20aの引き出し部21aが設けられている。モータハウジング内において、モータ1内の各相(U,V,W)の配線が、それぞれ前記端子ボックス18A内の対応する各端子までそれぞれ延びて接続されている。これら各端子に動力ケーブル20aがそれぞれ接続されている。これら動力ケーブル20aは、端子ボックス18Aの引き出し部21aからモータ外に引き出され、前記インバータ装置72におけるインバータ81に接続されている。インバータ81における動力ケーブル20aの取り出し部21bは、前記端子ボックス18Aの引き出し部21aよりも、車両の高さ方向に高い位置に設けられている。前記インバータ81は、車両に搭載されるバッテリ69(図5)の直流電流をモータ1の駆動に用いる3相の交流電力に変換するものである。
As shown in FIG. 1,
図2に示すように、モータハウジング9内において、前記角度センサ本体16のうち検出部16bから延びる配線が、端子ボックス18B内の対応する端子に接続されている。また、モータハウジング9内において、油量検知センサSo、温度検知センサSaからそれぞれ延びる配線が、前記端子ボックス18B内の対応する端子にそれぞれ接続されている。各端子にセンサケーブル20bがそれぞれ接続されている。こられセンサケーブル20bは、端子ボックス18Bの引き出し部21aからモータ外に引き出され、モータコントロール部79に接続されている。
As shown in FIG. 2, in the
減速機2の入力軸3は、軸方向一端がモータ回転軸6内に延びて、モータ回転軸6とスプライン嵌合されている。減速機ハウジング7に軸受23が設けられ、入力軸3の軸方向他端が前記軸受23によって支持される。したがって、減速機2の入力軸3およびモータ回転軸6は、軸受12,13,23により一体に回転自在に支持される。減速機ハウジング7内における、入力軸3の軸方向他端寄りの外周面には、偏心部24,25が設けられる。これら偏心部24,25は、偏心運動による遠心力が互いに打ち消されるように180°位相をずらして設けられている。
The
減速機2は、減速比が1/6以上のものであるのが良い。この減速機2は、曲線板26,27と、複数の外ピン28と、運動変換機構29と、カウンタウェイト30,30とを有するサイクロイド減速機である。曲線板26,27は、偏心部24,25にそれぞれ回転自在に設けられる。モータハウジング9および減速機ハウジング7に渡って複数の外ピン28が支持され、これら外ピン28が曲線板26,27の外周に転接するようになっている。前記運動変換機構29は、曲線板26,27の自転運動を、出力部材4に伝達する機構である。この運動変換機構29は、出力部材4に設けられた複数の内ピン31と、曲線板26,27に設けられた貫通孔32とを有する。内ピン31は、出力部材4の回転軸心を中心として円周方向に等間隔に配設されている。図2に示すように、減速機2の入力軸3における偏心部24,25に隣接する軸方向位置に、それぞれカウンタウェイト30,30が設けられている。
The
車輪用軸受5は、内周に複列の軌道面を形成した外方部材33と、これら各軌道面に対向する軌道面を外周に設けた内方部材34と、これら外方部材33および内方部材34の軌道面間に介在した複列の転動体35とを有する。内方部材34は、駆動輪を取付けるハブを兼用する。この車輪用軸受5は、複列のアンギュラ玉軸受とされていて、転動体35はボールからなり、各列毎に保持器で保持されている。前記軌道面は断面円弧状であり、各軌道面は接触角が背面合わせとなるように形成されている。また外方部材33と内方部材34との間の軸受空間のアウトボード側端、インボード側端は、それぞれシール部材36,37でシールされている。
The
外方部材33は静止側軌道輪となるものであって、減速機ハウジング7のアウトボード側端に取付けるフランジ33aを有する。フランジ33aには、周方向の複数箇所にボルト挿通孔が設けられ、減速機ハウジング7には、ボルト挿通孔に対応する位置に、雌ねじからなるボルト螺着孔が設けられている。ボルト挿通孔に挿通した取付ボルトをボルト螺着孔に螺着させることにより、外方部材33が減速機ハウジング7に取付けられる。
The
内方部材34は、出力部材4を挿通する中空部におけるインボード側の外周面に段部が形成され、この段部に内輪38が嵌合固定されている。内方部材34の外周面に一列の軌道面が一体形成され、内輪38の外周面に他列の軌道面が形成されている。内方部材34のアウトボード側端には、車輪取付用のハブフランジ34aが設けられている。内方部材34の中空部にはスプライン孔が形成され、同中空部に出力部材4がスプライン嵌合されている。出力部材4の先端部には雄ねじが形成され、中空部から突出する出力部材4の先端部にナット39を螺着することで、出力部材4と内方部材34とが連結されている。
The
潤滑油供給機構40は、減速機2の潤滑およびモータ1の冷却の両方に用いられる潤滑油を供給する軸心給油機構であって、潤滑油流路41と、モータ回転軸油路42と、減速機油路43と、ポンプ44と、潤滑油を貯留する潤滑油貯留部45とを有する。潤滑油流路41は、モータハウジング9に設けられる。潤滑油貯留部45に貯留された潤滑油が、ポンプ44により吸い上げられて潤滑油流路41および減速機油路43に導かれるようになっている。
The lubricating
モータ回転軸油路42は、モータ回転軸6内の軸心に沿って設けられている。モータ回転軸6において、ロータ固定部材14が設けられる軸方向位置に、径方向に貫通する複数の貫通孔6bが設けられている。またロータ固定部材14には、前記複数の貫通孔6bに連通して径方向外方に延びる油路14aが設けられている。この油路14aは、ロータ固定部材14とモータロータ11の内周面との環状隙間δ1に連通する。潤滑油は、順次、潤滑油流路41、モータ回転軸油路42、貫通孔6b、および油路14aを経由して環状隙間δ1に導かれて、モータ1の冷却に供される。冷却に供された潤滑油は、ロータ固定部材14のフランジ14bと、モータロータ11の端面との間のスリットからそれぞれ排出されて、遠心力および重力によって下方に移動し潤滑油貯留部45に貯留される。
The motor rotation
減速機油路43は、減速機2に設けられ、潤滑油流路41および潤滑油貯留部45にそれぞれ連通して潤滑油を減速機2に供給する。この減速機内部を潤滑する潤滑油は、遠心力および重力によって径方向外方で且つ下方に移動し、潤滑油貯留部45に戻される。
ポンプ44は、潤滑油流路41の流路途中に設けられ、潤滑油を強制的に循環させている。このポンプ44は、例えば、出力部材4の回転により回転する図示外のインナーロータと、このインナーロータの回転に伴って従動回転するアウターロータと、ポンプ室と、吸入口と、吐出口とを有するサイクロイドポンプである。前記インナーロータが内方部材34の回転により回転すると、アウターロータは従動回転する。このときインナーロータおよびアウターロータはそれぞれ異なる回転中心を中心として回転することで、前記ポンプ室の容積が連続的に変化する。これにより、前記吸入口から流入した潤滑油が前記吐出口から潤滑油流路41に圧送される。
The speed
The
潤滑油貯留部45は、減速機側貯留部45aとモータ側貯留部45bとを有する。減速機側貯留部45aは、減速機ハウジング7の下部に設けられ、モータ側貯留部45bは、モータハウジング9の下部に設けられる。モータハウジング9の下部には、減速機側貯留部45aとモータ側貯留部45bとを連通する貫通孔46が形成されている。この貫通孔46により、減速機側貯留部45aに貯留される潤滑油の油面高さと、モータ側貯留部45bに貯留される潤滑油の油面高さとが同一の油面高さとなる。
The lubricating
図3は、図1の電動車両の導電路等を拡大して示す要部の拡大図である。図4(A)は同導電路の係止部材22の正面図であり、図4(B)は同係止部材22の側面図である。図3に示すように、車体51およびサスペンション8には、動力ケーブル20aおよびセンサケーブル20bの長手方向の一部を係止する係止部材22が設けられている。車体51のうち、インバータ81が搭載される付近の下部に、車幅方向に沿って定められた間隔を隔てて複数(この例では、各インホイールモータ駆動装置58についてそれぞれ2個)の係止部材22が設置され、サスペンション8のうちアーム部8cに、係止部材22が設置されている。アーム部8cは、車体51の下部から車両の高さ方向の下方に向けて突出する板状部材であって、このアーム部8cの下端にリンク部材8dを介して前記ロアーアーム8bが揺動自在に連結されている。アーム部8cの例えば長手方向中間部に、係止部材22が図示外のボルト等を介して連結されている。
FIG. 3 is an enlarged view of a main part showing the conductive path and the like of the electric vehicle of FIG. 1 in an enlarged manner. 4A is a front view of the locking
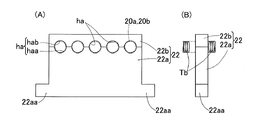
図4(A)に示すように、係止部材22は、複数の部材から構成されている。係止部材22は、車体51またはサスペンション8に連結される係止部材本体22aと、この係止部材本体22aに固定されて係止部材本体22aと共に各ケーブル20a,20bの挿入孔haを形成するカバー部材22bとを有する。図4(B)に示すように、係止部材本体22aは、例えば、略長方形板状に形成されている。図4(A)に示すように、この係止部材本体22aの一端縁部には、各挿入孔haの円周方向の半分を成す半円弧状部分haaが所定間隔おきに形成されている。係止部材本体22aの前記一端縁部に対向するカバー部材22bの一端縁部には、各挿入孔haの円周方向の残余の半分を成す半円弧状部分habが所定間隔おきに形成されている。係止部材本体22aに、例えば、図示外のボルト等を介してカバー部材22bが固定される。係止部材22は、このカバー部材22bの固定状態において、一対の半円弧状部分haa,habが組み合わされて各ケーブル20a,20bの挿入孔haが形成される。係止部材本体22aの他端縁部には、長手方向両側に延びる延在部22aa,22aaが設けられ、この延在部22aa,22aaに例えばボルト挿通孔がそれぞれ設けられる。各ボルト挿通孔に挿通されるボルトにより、係止部材本体22aが車体51またはサスペンション8に連結される。
As shown in FIG. 4A, the locking
図3に示すように、動力ケーブル20aおよびセンサケーブル20bを、それぞれ覆う樹脂部材Tbが設けられている。この樹脂部材Tbは、例えば、可撓性のある中空円筒形状から成るコルゲートチューブであって、円周方向の一部にスリットSLが形成されたものが適用される。この場合、スリットSLを一時的に広げて樹脂部材Tbの中空孔を拡径させることで、樹脂部材Tbをケーブル20a,20bに着脱容易に設け得る。
As shown in FIG. 3, the resin member Tb which covers the
前記樹脂部材Tbは、動力ケーブル20aおよびセンサケーブル20bのうち、係止部材22で係止されている部分以外を覆う。すなわち樹脂部材Tbは、各ケーブル20a,20bの長手方向に沿って設けられる複数の樹脂部材Tbからなり、一つの樹脂部材Tbは、端子ボックス18A,18Bの引き出し部21aから、サスペンション8に設けられる係止部材22における挿入孔haの下面近傍まで延びる。この樹脂部材Tbに隣接する別の樹脂部材Tbは、前記係止部材22における挿入孔haの上面近傍から、車体51に設けられるアウトボード側の係止部材22における挿入孔haのアウトボード側側面近傍まで延びる。前記樹脂部材Tbに隣接する別の樹脂部材Tbは、前記アウトボード側の係止部材22における挿入孔haのインボード側側面近傍から、車体51に設けられるインボード側の係止部材22における挿入孔haのアウトボード側側面近傍まで延びる。これら複数の樹脂部材22のいずれも前述のスリットSLが形成されているため、スリットSLを一時的に広げて樹脂部材Tnの中空孔を拡径させることで、樹脂部材Tbをケーブル20a,20bの各箇所に着脱自在である。
The resin member Tb covers the
図5は、実施形態に係る電動車両を平面図で示す概念構成のブロック図である。この電動車両は、車体51の左右の後輪となる車輪52が駆動輪とされ、左右の前輪となる車輪53が従動輪の操舵輪とされた4輪の自動車である。駆動輪および従動輪となる車輪52,53は、いずれもタイヤを有し、それぞれ車輪用軸受5を介して車体51に支持されている。車輪用軸受5は、図5ではハブベアリングの略称「H/B」を付してある。駆動輪となる左右の車輪52,52は、それぞれ独立の走行用のモータ1,1により駆動される。モータ1の回転は、減速機2および車輪用軸受5を介して車輪52に伝達される。これらモータ1、減速機2、および車輪用軸受5は、互いに一つの組立部品であるインホイールモータ駆動装置58を構成しており、インホイールモータ駆動装置58は、一部または全体が車輪52内に配置される。各車輪52,53には、電動式のブレーキ59,60が設けられている。
FIG. 5 is a block diagram of a conceptual configuration showing the electric vehicle according to the embodiment in a plan view. This electric vehicle is a four-wheeled vehicle in which the
左右の前輪となる操舵輪である車輪53,53は、転舵機構61を介して転舵可能であり、操舵機構62により操舵される。転舵機構61は、タイロッド61aを左右移動させることで、車輪用軸受5を保持した左右のナックルアーム11bの角度を変える機構であり、EPS(電動パワーステアリング)モータ63により、回転・直線運動変換機構(図示せず)を介して左右移動させられる。操舵機構62は、タイロッド61aと機械的に連結されていないステアリングホイール64の操舵角を操舵角センサ65で検出し、その検出した操舵角である旋回指令によりEPSモータ63に駆動指令を与えるステアバイワイヤ式とされている。
The
制御系を説明する。
自動車全般の制御を行う電気制御ユニットであるECU71と、このECU71の指令に従って走行用のモータ1の制御を行うインバータ装置72と、ブレーキコントローラ73とが、車体51に搭載されている。ECU71は、コンピュータとこれに実行されるプログラム、並びに各種の電子回路等で構成される。
The control system will be described.
The
ECU71は、機能別に大別すると駆動制御部71aと一般制御部71bとに分けられる。駆動制御部71aは、アクセル操作部66の出力する加速指令と、ブレーキ操作部67の出力する減速指令と、操舵角センサ65の出力する旋回指令とから、左右輪の走行用モータ1,1に与える加速・減速指令を生成し、インバータ装置72へ出力する。駆動制御部71aは、上記の他に、出力する加速・減速指令を、各車輪52,53の車輪用軸受5,5に設けられた回転センサ74から得られるタイヤ回転数の情報や、車載の各センサの情報を用いて補正する機能を有していても良い。アクセル操作部66は、アクセルペダルとその踏み込み量を検出して前記加速指令を出力するセンサ66aとでなる。ブレーキ操作部67は、ブレーキペダルとその踏み込み量を検出して前記減速指令を出力するセンサ67aとでなる。
The
ECU71の一般制御部71bは、前記ブレーキ操作部67の出力する減速指令をブレーキコントローラ73へ出力する機能、各種の補機システム75を制御する機能、コンソールの操作パネル76からの入力指令を処理する機能、表示装置77に表示を行う機能などを有する。表示装置77は、液晶表示装置等の画像を表示可能なものである。前記補機システム75は、例えば、エアコン、ライト、ワイパー、GPS、エアバッグ等であり、ここでは代表して一つのブロックとして示す。
The general control unit 71b of the
ブレーキコントローラ73は、ECU71から出力される減速指令に従って、各車輪52,53のブレーキ59,60に制動指令を与える手段である。ECU71から出力される制動指令には、ブレーキ操作部67の出力する減速指令によって生成される指令の他に、ECU71の持つ安全性向上のための手段によって生成される指令がある。ブレーキコントローラ73は、この他にアンチロックブレーキシステムを備える。ブレーキコントローラ73は、電子回路やマイコン等により構成される。
The
インバータ装置72は、各モータ1に対して設けられたパワー回路部78と、このパワー回路部78を制御するモータコントロール部79とで構成される。モータコントロール部79は、各パワー回路部78に対して共通して設けられていても、別々に設けられていても良いが、共通して設けられた場合であっても、各パワー回路部78を、例えば互いにモータトルクが異なるように独立して制御可能なものとされる。モータコントロール部79は、このモータコントロール部79が持つインホイールモータ駆動装置58に関する各検出値や制御値等の各情報(「IWMシステム情報」と称す)をECUに出力する機能を有する。
The
図6は、この電動車両の制御系のブロック図である。同図に示すように、パワー回路部78は、バッテリ69の直流電力をモータ1の駆動に用いる3相の交流電力に変換するインバータ81と、このインバータ81を制御するPWMドライバ82とで構成される。モータ1は3相の同期モータ等からなる。インバータ81は、複数の半導体スイッチング素子(図示せず)で構成され、PWMドライバ82は、入力された電流指令をパルス幅変調し、前記各半導体スイッチング素子にオンオフ指令を与える。
FIG. 6 is a block diagram of the control system of this electric vehicle. As shown in the figure, the
モータコントロール部79は、コンピュータとこれに実行されるプログラム、および電子回路により構成され、その基本となる制御部としてモータ駆動制御部83を有している。モータ駆動制御部83は、上位制御手段であるECU71から与えられるトルク指令等による加速・減速指令に従い、電流指令に変換して、パワー回路部78のPWMドライバ82に電流指令を与える手段である。モータ駆動制御部83は、インバータ81からモータ1に流すモータ電流値を電流センサ85から得て、電流フィードバック制御を行う。また、モータ駆動制御部83は、モータロータ11(図2)の回転角を角度センサ15から得て、ベクトル制御を行う。
この実施形態では、判定手段47A,47Bを、インバータ装置における上記構成のモータコントロール部79に設けている。判定手段47Aは、油量検知センサで検知された値が定められた液面高さの下限値を下回っていないか判定する手段である。判定手段47Aは、検知された値が前記下限値を下回ったと判定したとき、異常報告手段91に出力する。
判定手段47Bは、温度検知センサSaで検知される温度が閾値を超えるか否かを判定する手段である。温度検知センサSaで検知される値は、モータコントロール部79において、アンプApで増幅され、この増幅値が判定手段47Bにて判定される。判定手段47Bは、検知される温度が閾値を超えたと判定したとき、異常報告手段91に出力する。異常報告手段91は、ECU71に異常の報告を行い、その異常の報告により、ECU71の異常表示手段92が運転席の表示装置77に異常の表示を行う。このため、運転者は、その異常を直ぐに認識することができて、車両の停止や徐行、修理工場への走行など、運転者により迅速に適切な処置を行うことができる。
In this embodiment, the determination means 47A and 47B are provided in the
The
作用効果について説明する。
この電動車両の導電路によると、車体51およびサスペンション8に、動力ケーブル20aおよびセンサケーブル20bの長手方向の一部を係止する係止部材22を設けたため、車両の路面振動により車輪52を駆動するモータ1の上下振動があっても、ケーブル20a,20bの屈曲を係止部材22で小さく抑えることができる。これにより、動力ケーブル20aやセンサケーブル20bのシールド線が屈曲動作による曲げ疲労で破損することを抑えることができる。係止部材22は、ケーブル20a,20bの長手方向の一部を係止するため、ケーブル全体としてサスペンション8の挙動に追従することが可能となる。
The effect will be described.
According to the conductive path of this electric vehicle, since the locking
動力ケーブル20aおよびセンサケーブル20bをそれぞれ覆う樹脂部材Tbを設けたため、例えば、車両の走行時に路面等から跳上げられる異物等が、動力ケーブル20aおよびセンサケーブル20bに直接当たることを防止でき、ケーブル20a,20bを保護することができる。樹脂部材Tbであるコルゲートチューブは可撓性を有するため、ケーブル20a,20bが屈曲しても同ケーブルに追従して撓み、コルゲートチューブ自体に割れ、欠け等を生じることなくケーブル20a,20bを保護することができる。
樹脂部材Tbは、動力ケーブル20aおよびセンサケーブル20bのうち、係止部材22で係止されている部分以外を覆うため、ケーブル20a,20bを係止部材22で係止した後、ケーブル20a,20bの係止部材22で係止されている部分以外を、樹脂部材Tbで容易に覆うことができる。この樹脂部材Tbが例えば経年劣化した場合には、ケーブル20a,20bを係止部材22で係止した状態で、樹脂部材Tbのみ容易に交換することができる。
Since the resin member Tb that covers each of the
The resin member Tb covers the
係止部材22は、係止部材本体22aとカバー部材22bとを有するため、インバータ装置72およびインホイールモータ駆動装置58を車体51に設けた後、ケーブル20a,20bの長手方向の一部を、係止部材本体21aとカバー部材22bとで挟み込むように挿入孔haに挿入することで容易に係止することができる。この場合、ケーブル20a,20bを予め係止した状態で、インバータ装置72およびインホイールモータ駆動装置58を車体51に設ける場合よりも、組立の作業効率を高めることができる。
Since the locking
他の実施形態について説明する。
以下の説明においては、各形態で先行する形態で説明している事項に対応している部分には同一の参照符を付し、重複する説明を略する。構成の一部のみを説明している場合、構成の他の部分は、先行して説明している形態と同様とする。
Another embodiment will be described.
In the following description, the same reference numerals are given to the portions corresponding to the matters described in the preceding forms in each embodiment, and the overlapping description is omitted. When only a part of the configuration is described, the other parts of the configuration are the same as those described in the preceding section.
図7(A)は、他の実施形態に係る電動車両の導電路の係止部材22の正面図であり、図7(B)は同係止部材22の側面図である。この例の係止部材22は、係止されるケーブル20a,20bに作用する衝撃を吸収する緩衝材22cを含んでいる。緩衝材22cは、係止部材22の挿入孔haに嵌め込まれ、ゴム等の弾性体から成る環状部材である。前記挿入孔haに嵌め込まれた緩衝材22cの内周に、ケーブル20a,20bが挿入されて係止される。図7(B)に示すように、緩衝材22cの軸方向両端は、係止部材本体22aやカバー部材22bの両端面からそれぞれ突出する幅広に形成されている。この場合、ケーブル20a,20bを確実に緩衝材22cで保護して係止することができ、例えば、ケーブル20a,20bが挿入孔haの縁部に擦れて損傷する等の不具合を未然に防止することができる。また、モータ1の上下振動に起因してケーブル20a,20bの屈曲動作があっても、緩衝材22cにより、ケーブル20a,20bに作用する衝撃を吸収することができる。これにより、ケーブル20a,20bの寿命を延ばすことが可能になる。
FIG. 7A is a front view of the locking
図8に示すように、参考提案例として、係止部材22は、樹脂部材Tbと、樹脂部材Tbに覆われている動力ケーブル20aおよびセンサケーブル20bとを共に係止するものであっても良い。この場合、ケーブル20a,20bの露出部分をより少なくでき、ケーブル20a,20bを保護する効果を高めることができる。
図9に示すように、車輪用軸受5に荷重センサSbを設け、この荷重センサSbからモータコントロール部79まで延びるセンサケーブル20bの長手方向の一部を、係止部材22で係止しても良い。
As shown in FIG. 8, reference Proposed Example, locking
As shown in FIG. 9, even if a load sensor Sb is provided in the
1…モータ
2…減速機
3…入力軸
4…出力部材
5…車輪用軸受
8…サスペンション
20a…動力ケーブル
20b…センサケーブル
22…係止部材
22c…緩衝部材
51…車体
52…車輪
58…インホイールモータ駆動装置
69…バッテリ
72…インバータ装置
78…パワー回路部
79…モータコントロール部
81…インバータ
Sa…温度検知センサ
Sb…荷重センサ
So…油量検知センサ
Tb…樹脂部材
DESCRIPTION OF
Claims (7)
前記モータとインバータとを接続する動力ケーブルを有し、
インホイールモータ駆動装置の状態を検出するセンサを設け、このセンサから前記モータコントロール部まで延びるセンサケーブルを有し、
車体またはサスペンションに、前記動力ケーブルおよびセンサケーブルの長手方向の一部を係止する係止部材が設けられ、
前記動力ケーブルおよびセンサケーブルを、それぞれ覆う樹脂部材が設けられ、
前記樹脂部材は、前記動力ケーブルおよび前記センサケーブルのうち、前記係止部材で係止されている部分以外を覆うことを特徴とする電動車両の導電路。 An in-wheel motor drive device having a motor for driving wheels, a speed reducer for reducing the rotation of the motor, and a wheel bearing rotated by an output member coaxial with the input shaft of the speed reducer, and a battery mounted on the vehicle A power circuit unit including an inverter for converting the DC power of the motor into AC power used for driving the motor, and an inverter device having a motor control unit for controlling the power circuit unit, and the inverter device is attached to the vehicle body of the vehicle. In the electric vehicle in which the in-wheel motor driving device is supported by the vehicle body via a suspension,
Having a power cable connecting the motor and the inverter;
A sensor for detecting the state of the in-wheel motor drive device is provided, and a sensor cable extending from the sensor to the motor control unit is provided.
The vehicle body or the suspension, a locking member for locking the longitudinal direction of a part of the power cable and the sensor cable is set vignetting,
Resin members are provided to cover the power cable and the sensor cable,
The resin member, the power cable and of the sensor cable, the conductive path of an electric vehicle characterized by a crotch covering a portion other than the portion that is engaged with the locking member.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011256983A JP5848105B2 (en) | 2011-11-25 | 2011-11-25 | Conductive path of electric vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011256983A JP5848105B2 (en) | 2011-11-25 | 2011-11-25 | Conductive path of electric vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013112003A JP2013112003A (en) | 2013-06-10 |
| JP5848105B2 true JP5848105B2 (en) | 2016-01-27 |
Family
ID=48708011
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011256983A Active JP5848105B2 (en) | 2011-11-25 | 2011-11-25 | Conductive path of electric vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5848105B2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015063266A (en) * | 2013-09-26 | 2015-04-09 | Ntn株式会社 | Drive device for wheel |
| JP6313620B2 (en) * | 2013-12-11 | 2018-04-18 | Ntn株式会社 | Power line protection structure for in-wheel motor drive |
| US10059162B2 (en) | 2014-06-27 | 2018-08-28 | Nissan Motor Co., Ltd. | Unsprung power supply apparatus for in-wheel motor vehicle |
| CN104129273A (en) * | 2014-08-08 | 2014-11-05 | 成都旭腾蓝驱科技有限公司 | Electric drive system for independent suspension wheel |
| JP6514468B2 (en) * | 2014-09-17 | 2019-05-15 | Ntn株式会社 | Power wire wiring structure of in-wheel motor drive device |
| JP2016064762A (en) * | 2014-09-25 | 2016-04-28 | Ntn株式会社 | In-wheel motor mounted vehicle |
| JP2016088269A (en) * | 2014-11-04 | 2016-05-23 | 矢崎総業株式会社 | Attachment structure of vehicle wire harness |
| JP7052430B2 (en) * | 2018-03-06 | 2022-04-12 | トヨタ自動車株式会社 | String-shaped binding tool |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3228201B2 (en) * | 1997-11-13 | 2001-11-12 | 住友電装株式会社 | Corrugated tube guide clamp |
| JP2003153588A (en) * | 2001-11-09 | 2003-05-23 | Nissan Motor Co Ltd | Motor driver |
| JP4628136B2 (en) * | 2004-02-26 | 2011-02-09 | トヨタ自動車株式会社 | Wiring device |
| JP2007276738A (en) * | 2006-04-11 | 2007-10-25 | Honda Motor Co Ltd | Electric wire retaining device |
| JP4894564B2 (en) * | 2007-03-07 | 2012-03-14 | 三菱自動車工業株式会社 | Power line routing structure |
| JP5434748B2 (en) * | 2009-12-24 | 2014-03-05 | 日立金属株式会社 | Conductive path for vehicles |
-
2011
- 2011-11-25 JP JP2011256983A patent/JP5848105B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013112003A (en) | 2013-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5848105B2 (en) | Conductive path of electric vehicle | |
| JP5784930B2 (en) | Electric car | |
| US9114711B2 (en) | Electric vehicle | |
| US8909406B2 (en) | Electric automobile | |
| JP5936306B2 (en) | Electric car | |
| WO2012114902A1 (en) | Electric automobile | |
| JP5657425B2 (en) | Electric car | |
| JP5705585B2 (en) | Electric car | |
| WO2014069280A1 (en) | In-wheel motor drive device | |
| US20140303824A1 (en) | Electric vehicle | |
| JP5886008B2 (en) | Electric vehicle motor control device | |
| JP5731233B2 (en) | Electric car | |
| US9184583B2 (en) | Electric automobile | |
| JP2013104532A (en) | In-wheel motor vehicle driving device | |
| WO2012032972A1 (en) | In-wheel motor electric vehicle | |
| JP5731593B2 (en) | Electric car | |
| JP5731234B2 (en) | Electric car | |
| JP2013116029A (en) | Device and method for controlling electric vehicle, and electric vehicle | |
| JP5829497B2 (en) | Electric vehicle motor control device | |
| JP5805406B2 (en) | In-wheel motor drive device | |
| JP2014209843A (en) | Electric vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140930 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150709 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150714 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150909 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5848105 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |