JP5837923B2 - 動きセンサ、方法、および迅速に利得を較正することができる動きセンサを設けるコンピュータ読み取り可能記憶媒体 - Google Patents
動きセンサ、方法、および迅速に利得を較正することができる動きセンサを設けるコンピュータ読み取り可能記憶媒体 Download PDFInfo
- Publication number
- JP5837923B2 JP5837923B2 JP2013513173A JP2013513173A JP5837923B2 JP 5837923 B2 JP5837923 B2 JP 5837923B2 JP 2013513173 A JP2013513173 A JP 2013513173A JP 2013513173 A JP2013513173 A JP 2013513173A JP 5837923 B2 JP5837923 B2 JP 5837923B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- signals
- agc control
- block
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 285
- 230000033001 locomotion Effects 0.000 title claims description 109
- 230000005291 magnetic effect Effects 0.000 claims description 133
- 230000008859 change Effects 0.000 claims description 51
- 238000001514 detection method Methods 0.000 claims description 22
- 230000004044 response Effects 0.000 claims description 18
- 238000013459 approach Methods 0.000 claims description 7
- 230000008569 process Effects 0.000 description 260
- 230000007704 transition Effects 0.000 description 56
- 238000012795 verification Methods 0.000 description 30
- 230000005294 ferromagnetic effect Effects 0.000 description 22
- 230000002159 abnormal effect Effects 0.000 description 16
- 238000012545 processing Methods 0.000 description 10
- 230000003247 decreasing effect Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 230000001960 triggered effect Effects 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 3
- 230000005355 Hall effect Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000000638 solvent extraction Methods 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 238000010200 validation analysis Methods 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- WPYVAWXEWQSOGY-UHFFFAOYSA-N indium antimonide Chemical compound [Sb]#[In] WPYVAWXEWQSOGY-UHFFFAOYSA-N 0.000 description 1
- 230000005381 magnetic domain Effects 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 229920000371 poly(diallyldimethylammonium chloride) polymer Polymers 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000005641 tunneling Effects 0.000 description 1
Images

























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/2448—Correction of gain, threshold, offset or phase control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/487—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals delivered by rotating magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/488—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals delivered by variable reluctance detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/489—Digital circuits therefor
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
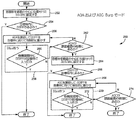
ブロック860において、図3および図11のDIR_CHANGE_FLAG信号が検出されたか(セットされているか)否か判定を行う。DIR_CHANGE_FLAG信号が検出されないと判定された場合、本プロセスはブロック862に進む。
Claims (24)
- 動きセンサであって、
物体に伴う磁場を示す複数の磁場信号を生成するように構成されている複数の磁場検知エレメントと、
前記複数の磁場信号を表す複数の信号をそれぞれ受け取るように結合され、それぞれ複数の利得調節出力信号を生成するように構成されている複数のAGC回路と、
前記複数のAGC回路のそれぞれの利得を制御するために、複数のAGC制御信号を生成するように構成されているAGCプロセッサと、
前記複数のAGC制御信号の内第1AGC制御信号を表す第1信号と、前記複数のAGC制御信号の内第2AGC制御信号を表す第2信号とを受け取るように結合されているチャネル振幅差プロセッサであって、このチャネル振幅差プロセッサが、前記第1信号の値が、前記第2信号の値よりも所定量だけ異なる利得を表すか否か検出するように構成されており、この検出に応答して前記異なる利得を示すAMP_DIFF_FLAG信号を生成するように構成されており、前記AMP_DIFF_FLAG信号に応答して、前記AGCプロセッサが、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号の値に近づけるように構成されている、チャネル振幅差プロセッサと、
を備えている、動きセンサ。 - 請求項1記載の動きセンサにおいて、前記チャネル振幅差プロセッサが、更に、前記複数の利得調節出力信号の内第1利得調節出力信号の正および負のピークを識別するように構成されており、前記複数の利得調節出力信号の内第1利得調節出力信号の識別された正または負のピークが所定のピークである場合にのみ、前記AGCプロセッサが、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号に近づけるように構成されている、動きセンサ。
- 請求項2記載の動きセンサにおいて、前記所定のピークが、電力が最初に前記動きセンサに印加された時点の後に来る時間における第1ピークである、動きセンサ。
- 請求項3記載の動きセンサにおいて、前記チャネル振幅差プロセッサが、更に、上限および下限を有するLEARN振幅枠を生成し、前記利得調節出力信号の内前記第1利得調節出力信号が前記上限または下限の内少なくとも一方と交差する前に現れる前記第1ピークを識別するように構成されている、動きセンサ。
- 請求項4記載の動きセンサにおいて、前記チャネル振幅差プロセッサが、更に、前記利得調節出力信号の内前記第1利得調節出力信号が前記上限および下限の双方と交差する前に現れる前記第1ピークを識別するように構成されている、動きセンサ。
- 請求項4記載の動きセンサであって、更に、前記複数の磁場信号を表す他のそれぞれの複数の信号を受け取るように結合され、それぞれの複数のオフセット調節出力信号を生成するように構成されている複数のAOA回路を備えており、前記動きセンサが、更に、前記複数のAOA回路のそれぞれのDCオフセットを制御するために複数のAOA制御信号を生成するように構成されており、前記AOA回路のそれぞれが、前記複数のAGC回路のそれぞれと直列に結合されている、動きセンサ。
- 請求項1記載の動きセンサにおいて、前記チャネル振幅差プロセッサが、更に、前記複数の磁場信号の内少なくとも1つのサイクルを識別するように構成されており、前記AGCプロセッサが、更に、前記識別されたサイクルが所定のサイクルである場合にのみ、前記複数のAGC制御信号の内前記第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号の値に近づけるように構成されている、動きセンサ。
- 請求項7記載の動きセンサにおいて、前記所定のサイクルが、電力を最初に前記動きセンサに印加した時点の後に来る時間における第1サイクルである、動きセンサ。
- 物体の動きを検出する方法であって、
前記物体に伴う磁場を示す複数の磁場信号を生成するステップと、
前記複数の磁場信号を表す複数の利得調節信号を生成するステップと、
前記複数の利得調節信号のそれぞれの利得を制御するために、複数のAGC制御信号を生成するステップと、
前記複数のAGC制御信号の内第1AGC制御信号の値が、前記複数のAGC制御信号の内第2AGC制御信号の値よりも所定量だけ高い利得を表すか否か検出するステップと、
前記検出に応答して、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号の値に近づけるステップと、を備えている、方法。 - 請求項9記載の方法において、前記値を変化させるステップが、
前記複数の利得調節信号の内第1利得調節信号の正および負ピークを識別するステップと、
前記複数の利得調節信号の内第1利得調節信号の識別された正または負ピークが所定のピークである場合にのみ、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号の値に近づけるステップと、
を備えている、方法。 - 請求項10記載の方法において、前記正および負ピークを識別するステップが、電力が最初に前記動きセンサに印加された時点の後に来る時間において第1ピークを識別するステップを含む、方法。
- 請求項11記載の方法において、前記第1ピークを識別するステップが、
上限および下限を有するLEARN振幅枠を生成するステップと、
前記利得調節信号の内前記第1利得調節信号が前記上限または下限の内少なくとも一方を交差する前に現れる前記第1ピークを識別するステップと、
を含む、方法。 - 請求項12記載の方法において、前記第1ピークを識別するステップが、
前記利得調節信号の内前記第1利得調節信号が前記上限および下限の双方を交差する前に現れる前記第1ピークを識別するステップを含む、方法。 - 請求項12記載の方法であって、更に、
前記複数の磁場信号を表す複数のオフセット調節信号を生成するステップと、
前記複数のオフセット調節信号のそれぞれのDCオフセットを制御するために、複数のAOA制御信号を生成するステップと、
を備えている、方法。 - 請求項9記載の方法であって、更に、
前記複数の磁場信号の内少なくとも1つのサイクルを識別するステップと、
識別されたサイクルが所定のサイクルである場合にのみ、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を、前記AGC制御信号の内第2AGC制御信号の値に近づけるステップと、
を備えている、方法。 - 請求項15記載の方法において、前記識別されたサイクルが、電力が最初に前記動きセンサに印加された時点の後に来る時間における第1サイクルである、方法。
- 物体の動き検出を行うためのコンピュータ読み取り可能コードを有するコンピュータ読み取り可能記憶媒体であって、
前記物体に伴う磁場を示す複数の磁場信号を受け取る命令と、
前記複数の磁場信号を表す複数の利得調節信号を生成する命令と、
前記複数の利得調節信号のそれぞれの利得を制御するために、複数のAGC制御信号を生成する命令と、
前記複数のAGC制御信号の内第1AGC制御信号の値が、前記複数のAGC制御信号の内第2AGC制御信号の値よりも所定量だけ高い利得を表すか否か検出する命令と、
前記検出に応答して、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号の値に近づける命令と、
を備えている、コンピュータ読み取り可能記憶媒体。 - 請求項17記載のコンピュータ読み取り可能記憶媒体において、前記値を変化させる命令が、
前記複数の利得調節信号の内第1利得調節信号の正および負ピークを識別する命令と、
前記複数の利得調節信号の内第1利得調節信号の識別された正または負ピークが所定のピークである場合にのみ、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を前記AGC制御信号の内第2AGC制御信号の値に近づける命令と、
を備えている、コンピュータ読み取り可能記憶媒体。 - 請求項18記載のコンピュータ読み取り可能記憶媒体において、前記正および負ピークを識別する命令が、電力が最初に前記動きセンサに印加された時点の後に来る時間において第1ピークを識別する命令を含む、コンピュータ読み取り可能記憶媒体。
- 請求項19記載のコンピュータ読み取り可能記憶媒体において、前記第1ピークを識別する命令が、
上限および下限を有するLEARN振幅枠を生成する命令と、
前記利得調節信号の内前記第1利得調節信号が前記上限または下限の内少なくとも一方を交差する前に現れる前記第1ピークを識別する命令と、
を含む、コンピュータ読み取り可能記憶媒体。 - 請求項20記載のコンピュータ読み取り可能記憶媒体において、前記第1ピークを識別する命令が、
前記利得調節信号の内前記第1利得調節信号が前記上限および下限の双方を交差する前に現れる前記第1ピークを識別する命令を含む、コンピュータ読み取り可能記憶媒体。 - 請求項20記載のコンピュータ読み取り可能記憶媒体であって、更に、
前記複数の磁場信号を表す複数のオフセット調節信号を生成する命令と、
前記複数のオフセット調節信号のそれぞれのDCオフセットを制御するために、複数のAOA制御信号を生成する命令と、
を備えている、コンピュータ読み取り可能記憶媒体。 - 請求項17記載のコンピュータ読み取り可能記憶媒体であって、更に、
前記複数の磁場信号の内少なくとも1つのサイクルを識別する命令と、
識別されたサイクルが所定のサイクルである場合にのみ、前記複数のAGC制御信号の内第1AGC制御信号の値を変化させて、その値を、前記AGC制御信号の内第2AGC制御信号の値に近づける命令と、
を備えている、コンピュータ読み取り可能記憶媒体。 - 請求項23記載のコンピュータ読み取り可能記憶媒体において、前記識別されたサイクルが、電力が最初に前記動きセンサに印加された時点の後に来る時間における第1サイクルである、コンピュータ読み取り可能記憶媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/793,163 US8680848B2 (en) | 2010-06-03 | 2010-06-03 | Motion sensor, method, and computer-readable storage medium providing a motion sensor that adjusts gains of two circuit channels to bring the gains close to each other |
| US12/793,163 | 2010-06-03 | ||
| PCT/US2011/035140 WO2011152946A1 (en) | 2010-06-03 | 2011-05-04 | Motion sensor, method, and computer-readable storage medium providing a motion sensor that can rapidly calibrate gains |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013527475A JP2013527475A (ja) | 2013-06-27 |
| JP2013527475A5 JP2013527475A5 (ja) | 2014-04-10 |
| JP5837923B2 true JP5837923B2 (ja) | 2015-12-24 |
Family
ID=44318205
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013513173A Active JP5837923B2 (ja) | 2010-06-03 | 2011-05-04 | 動きセンサ、方法、および迅速に利得を較正することができる動きセンサを設けるコンピュータ読み取り可能記憶媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8680848B2 (ja) |
| EP (1) | EP2564212B1 (ja) |
| JP (1) | JP5837923B2 (ja) |
| KR (1) | KR101831708B1 (ja) |
| WO (1) | WO2011152946A1 (ja) |
Families Citing this family (71)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9823090B2 (en) | 2014-10-31 | 2017-11-21 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a movement of a target object |
| US8447556B2 (en) * | 2009-02-17 | 2013-05-21 | Allegro Microsystems, Inc. | Circuits and methods for generating a self-test of a magnetic field sensor |
| EP2634592B1 (en) | 2009-07-22 | 2015-01-14 | Allegro Microsystems, LLC | Circuits and methods for generating a diagnostic mode of operation in a magnetic field sensor |
| US8598867B2 (en) | 2010-06-04 | 2013-12-03 | Allegro Microsystems, Llc | Circuits and methods for generating a threshold signal used in a motion detector |
| US8680846B2 (en) | 2011-04-27 | 2014-03-25 | Allegro Microsystems, Llc | Circuits and methods for self-calibrating or self-testing a magnetic field sensor |
| US9395391B2 (en) * | 2013-03-15 | 2016-07-19 | Allegro Microsystems, Llc | Magnetic field sensor and associated method that can store a measured threshold value in a memory device during a time when the magnetic field sensor is powered off |
| US8736260B2 (en) | 2012-01-06 | 2014-05-27 | Allegro Microsystems, Llc | Magnetic field sensor and associated method that can establish a measured threshold value and that can store the measured threshold value in a memory device |
| US10845434B2 (en) | 2012-01-06 | 2020-11-24 | Allegro Microsystems, Llc | Magnetic field sensor having a temperature compensated threshold on power up |
| US9201122B2 (en) * | 2012-02-16 | 2015-12-01 | Allegro Microsystems, Llc | Circuits and methods using adjustable feedback for self-calibrating or self-testing a magnetic field sensor with an adjustable time constant |
| US9817078B2 (en) | 2012-05-10 | 2017-11-14 | Allegro Microsystems Llc | Methods and apparatus for magnetic sensor having integrated coil |
| KR101326327B1 (ko) * | 2012-05-22 | 2013-11-11 | 명지대학교 산학협력단 | 사이리스터 밸브의 합성 시험 장치 |
| US9329057B2 (en) | 2012-05-31 | 2016-05-03 | Allegro Microsystems, Llc | Gear tooth sensor with peak and threshold detectors |
| EP2674729B1 (en) * | 2012-06-15 | 2016-07-13 | SICK STEGMANN GmbH | Position encoder |
| US8723512B1 (en) | 2012-11-26 | 2014-05-13 | Allegro Microsystems, Llc | Circuits and methods for generating a threshold signal used in a magnetic field sensor based on a peak signal associated with a prior cycle of a magnetic field signal |
| US9383425B2 (en) | 2012-12-28 | 2016-07-05 | Allegro Microsystems, Llc | Methods and apparatus for a current sensor having fault detection and self test functionality |
| US10725100B2 (en) | 2013-03-15 | 2020-07-28 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having an externally accessible coil |
| US10495699B2 (en) | 2013-07-19 | 2019-12-03 | Allegro Microsystems, Llc | Methods and apparatus for magnetic sensor having an integrated coil or magnet to detect a non-ferromagnetic target |
| US9810519B2 (en) | 2013-07-19 | 2017-11-07 | Allegro Microsystems, Llc | Arrangements for magnetic field sensors that act as tooth detectors |
| US10145908B2 (en) | 2013-07-19 | 2018-12-04 | Allegro Microsystems, Llc | Method and apparatus for magnetic sensor producing a changing magnetic field |
| WO2015031009A2 (en) | 2013-08-30 | 2015-03-05 | Allegro Microsystems, Llc | Circuits and methods for generating a threshold signal used in a motion detector in accordance with a least common multiple of a set of possible quantities of features upon a target |
| EP3203254A1 (en) | 2013-12-26 | 2017-08-09 | Allegro Microsystems, LLC | Methods and apparatus for sensor diagnostics |
| US9645220B2 (en) | 2014-04-17 | 2017-05-09 | Allegro Microsystems, Llc | Circuits and methods for self-calibrating or self-testing a magnetic field sensor using phase discrimination |
| US9735773B2 (en) | 2014-04-29 | 2017-08-15 | Allegro Microsystems, Llc | Systems and methods for sensing current through a low-side field effect transistor |
| US9851416B2 (en) * | 2014-07-22 | 2017-12-26 | Allegro Microsystems, Llc | Systems and methods for magnetic field sensors with self-test |
| DE102014114135B4 (de) * | 2014-09-29 | 2023-11-02 | Tdk-Micronas Gmbh | Verfahren und Vorrichtung zur Kalibrierung eines Winkel-Messsystems |
| US9739846B2 (en) | 2014-10-03 | 2017-08-22 | Allegro Microsystems, Llc | Magnetic field sensors with self test |
| US10712403B2 (en) | 2014-10-31 | 2020-07-14 | Allegro Microsystems, Llc | Magnetic field sensor and electronic circuit that pass amplifier current through a magnetoresistance element |
| US9823092B2 (en) | 2014-10-31 | 2017-11-21 | Allegro Microsystems, Llc | Magnetic field sensor providing a movement detector |
| US10156461B2 (en) | 2014-10-31 | 2018-12-18 | Allegro Microsystems, Llc | Methods and apparatus for error detection in a magnetic field sensor |
| US9719806B2 (en) | 2014-10-31 | 2017-08-01 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a movement of a ferromagnetic target object |
| US9720054B2 (en) | 2014-10-31 | 2017-08-01 | Allegro Microsystems, Llc | Magnetic field sensor and electronic circuit that pass amplifier current through a magnetoresistance element |
| US9804222B2 (en) | 2014-11-14 | 2017-10-31 | Allegro Microsystems, Llc | Magnetic field sensor with shared path amplifier and analog-to-digital-converter |
| US10466298B2 (en) | 2014-11-14 | 2019-11-05 | Allegro Microsystems, Llc | Magnetic field sensor with shared path amplifier and analog-to-digital-converter |
| US9804249B2 (en) | 2014-11-14 | 2017-10-31 | Allegro Microsystems, Llc | Dual-path analog to digital converter |
| US9638764B2 (en) | 2015-04-08 | 2017-05-02 | Allegro Microsystems, Llc | Electronic circuit for driving a hall effect element with a current compensated for substrate stress |
| US9523742B2 (en) | 2015-04-27 | 2016-12-20 | Allegro Microsystems, Llc | Circuits and methods for modulating current in circuits comprising sensing elements |
| US10107873B2 (en) | 2016-03-10 | 2018-10-23 | Allegro Microsystems, Llc | Electronic circuit for compensating a sensitivity drift of a hall effect element due to stress |
| US10260905B2 (en) | 2016-06-08 | 2019-04-16 | Allegro Microsystems, Llc | Arrangements for magnetic field sensors to cancel offset variations |
| US10041810B2 (en) | 2016-06-08 | 2018-08-07 | Allegro Microsystems, Llc | Arrangements for magnetic field sensors that act as movement detectors |
| US10012518B2 (en) | 2016-06-08 | 2018-07-03 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a proximity of an object |
| US10162017B2 (en) | 2016-07-12 | 2018-12-25 | Allegro Microsystems, Llc | Systems and methods for reducing high order hall plate sensitivity temperature coefficients |
| US10324141B2 (en) | 2017-05-26 | 2019-06-18 | Allegro Microsystems, Llc | Packages for coil actuated position sensors |
| US10996289B2 (en) | 2017-05-26 | 2021-05-04 | Allegro Microsystems, Llc | Coil actuated position sensor with reflected magnetic field |
| US10641842B2 (en) | 2017-05-26 | 2020-05-05 | Allegro Microsystems, Llc | Targets for coil actuated position sensors |
| US10837943B2 (en) | 2017-05-26 | 2020-11-17 | Allegro Microsystems, Llc | Magnetic field sensor with error calculation |
| US11428755B2 (en) | 2017-05-26 | 2022-08-30 | Allegro Microsystems, Llc | Coil actuated sensor with sensitivity detection |
| US10310028B2 (en) | 2017-05-26 | 2019-06-04 | Allegro Microsystems, Llc | Coil actuated pressure sensor |
| US10520559B2 (en) | 2017-08-14 | 2019-12-31 | Allegro Microsystems, Llc | Arrangements for Hall effect elements and vertical epi resistors upon a substrate |
| JP6959346B2 (ja) * | 2017-09-25 | 2021-11-02 | 株式会社Fuji | テープフィーダ |
| US10839920B2 (en) | 2017-09-29 | 2020-11-17 | Allegro Microsystems, Llc | Circuit having a low power charge pump for storing information in non-volatile memory during a loss of power event |
| US10430296B2 (en) | 2017-09-29 | 2019-10-01 | Allegro Microsystems, Llc | Circuit and method for storing information in non-volatile memory during a loss of power event |
| US10866117B2 (en) | 2018-03-01 | 2020-12-15 | Allegro Microsystems, Llc | Magnetic field influence during rotation movement of magnetic target |
| US11255700B2 (en) | 2018-08-06 | 2022-02-22 | Allegro Microsystems, Llc | Magnetic field sensor |
| US10823586B2 (en) | 2018-12-26 | 2020-11-03 | Allegro Microsystems, Llc | Magnetic field sensor having unequally spaced magnetic field sensing elements |
| US11061084B2 (en) | 2019-03-07 | 2021-07-13 | Allegro Microsystems, Llc | Coil actuated pressure sensor and deflectable substrate |
| US10955306B2 (en) | 2019-04-22 | 2021-03-23 | Allegro Microsystems, Llc | Coil actuated pressure sensor and deformable substrate |
| US11029176B2 (en) * | 2019-05-07 | 2021-06-08 | Allegro Microsystems, Llc | System and method for vibration detection with no loss of position information using a magnetic field sensor |
| US11125590B2 (en) | 2019-05-07 | 2021-09-21 | Allegro Microsystems, Llc | System and method for vibration detection with direction change response immunity using a magnetic field sensor |
| US10866288B2 (en) | 2019-05-14 | 2020-12-15 | Allegro Microsystems, Llc | Digital interpolation of switch point to reduce switch point jitter |
| US11280637B2 (en) | 2019-11-14 | 2022-03-22 | Allegro Microsystems, Llc | High performance magnetic angle sensor |
| US11237020B2 (en) | 2019-11-14 | 2022-02-01 | Allegro Microsystems, Llc | Magnetic field sensor having two rows of magnetic field sensing elements for measuring an angle of rotation of a magnet |
| US11125837B2 (en) * | 2020-01-14 | 2021-09-21 | Allegro Microsystems, Llc | Magnetic field sensor offset and gain adjustment |
| US11194004B2 (en) | 2020-02-12 | 2021-12-07 | Allegro Microsystems, Llc | Diagnostic circuits and methods for sensor test circuits |
| US11169223B2 (en) | 2020-03-23 | 2021-11-09 | Allegro Microsystems, Llc | Hall element signal calibrating in angle sensor |
| US11262422B2 (en) | 2020-05-08 | 2022-03-01 | Allegro Microsystems, Llc | Stray-field-immune coil-activated position sensor |
| US11493361B2 (en) | 2021-02-26 | 2022-11-08 | Allegro Microsystems, Llc | Stray field immune coil-activated sensor |
| US11762043B2 (en) | 2021-03-11 | 2023-09-19 | Allegro Microsystems, Llc | High resolution magnetic field sensors |
| US11630130B2 (en) | 2021-03-31 | 2023-04-18 | Allegro Microsystems, Llc | Channel sensitivity matching |
| US11578997B1 (en) | 2021-08-24 | 2023-02-14 | Allegro Microsystems, Llc | Angle sensor using eddy currents |
| US11848682B2 (en) | 2022-01-11 | 2023-12-19 | Allegro Microsystems, Llc | Diagnostic circuits and methods for analog-to-digital converters |
| US11994541B2 (en) | 2022-04-15 | 2024-05-28 | Allegro Microsystems, Llc | Current sensor assemblies for low currents |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2473700A1 (fr) | 1980-01-11 | 1981-07-17 | Jaeger | Capteur de proximite |
| US5594241A (en) | 1995-02-07 | 1997-01-14 | Ferrofluidics Corporation | Apparatus and method for jitter attenuation in rotary encoders |
| US5694038A (en) | 1996-01-17 | 1997-12-02 | Allegro Microsystems, Inc. | Detector of passing magnetic articles with automatic gain control |
| US6297627B1 (en) | 1996-01-17 | 2001-10-02 | Allegro Microsystems, Inc. | Detection of passing magnetic articles with a peak-to-peak percentage threshold detector having a forcing circuit and automatic gain control |
| US5917320A (en) | 1996-01-17 | 1999-06-29 | Allegro Microsystems, Inc. | Detection of passing magnetic articles while periodically adapting detection threshold |
| EP0875733B1 (en) | 1997-04-28 | 2004-03-03 | Allegro Microsystems Inc. | Detection of passing magnetic articles using a peak-on-peak percentage threshold detector |
| GB2334636A (en) | 1998-02-20 | 1999-08-25 | Lucas Ind Plc | Dynamic range control for a threshold detector |
| US6411080B1 (en) | 2001-04-02 | 2002-06-25 | Delphi Technologies, Inc. | Signal processing method for a variable reluctance vehicle speed sensing mechanism |
| JP2003050270A (ja) * | 2001-08-03 | 2003-02-21 | Asahi Kasei Corp | 磁気センサの出力補正方法及びその補正回路 |
| US6815944B2 (en) | 2002-01-31 | 2004-11-09 | Allegro Microsystems, Inc. | Method and apparatus for providing information from a speed and direction sensor |
| US6693419B2 (en) | 2002-05-28 | 2004-02-17 | Allegro Microsystems, Inc. | Proximity detector |
| US7365530B2 (en) | 2004-04-08 | 2008-04-29 | Allegro Microsystems, Inc. | Method and apparatus for vibration detection |
| US20050225318A1 (en) | 2004-04-08 | 2005-10-13 | Bailey James M | Methods and apparatus for vibration detection |
| US7882852B2 (en) * | 2004-05-04 | 2011-02-08 | Woodward Hrt, Inc. | Direct drive servovalve device with redundant position sensing and methods for making the same |
| US7253614B2 (en) | 2005-03-21 | 2007-08-07 | Allegro Microsystems, Inc. | Proximity detector having a sequential flow state machine |
| US7362094B2 (en) * | 2006-01-17 | 2008-04-22 | Allegro Microsystems, Inc. | Methods and apparatus for magnetic article detection |
| US7138793B1 (en) | 2006-04-17 | 2006-11-21 | Allegro Microsystems, Inc. | Methods and apparatus for dynamic offset adjustment in a magnetic article detector |
| US7714570B2 (en) * | 2006-06-21 | 2010-05-11 | Allegro Microsystems, Inc. | Methods and apparatus for an analog rotational sensor having magnetic sensor elements |
| GB0616437D0 (en) | 2006-08-18 | 2006-09-27 | Trw Ltd | Methods of processing encoder signals |
| US7694200B2 (en) * | 2007-07-18 | 2010-04-06 | Allegro Microsystems, Inc. | Integrated circuit having built-in self-test features |
| CN101918796B (zh) * | 2008-01-04 | 2012-09-05 | 阿莱戈微系统公司 | 用于角度传感器的方法和装置 |
| WO2009090996A1 (ja) * | 2008-01-15 | 2009-07-23 | Kabushiki Kaisha Toyota Chuo Kenkyusho | 検出信号処理回路とそれを備えた回転検出装置 |
| JP5191296B2 (ja) | 2008-07-18 | 2013-05-08 | アイシン精機株式会社 | 回転検出センサ |
| US8624588B2 (en) | 2008-07-31 | 2014-01-07 | Allegro Microsystems, Llc | Apparatus and method for providing an output signal indicative of a speed of rotation and a direction of rotation as a ferromagnetic object |
| US8022692B2 (en) | 2009-01-19 | 2011-09-20 | Allegro Microsystems, Inc. | Direction detection sensor |
| US8089270B2 (en) * | 2009-03-10 | 2012-01-03 | Allegro Microsystems, Inc. | Magnetic field detector having a variable threshold |
-
2010
- 2010-06-03 US US12/793,163 patent/US8680848B2/en active Active
-
2011
- 2011-05-04 JP JP2013513173A patent/JP5837923B2/ja active Active
- 2011-05-04 EP EP11720259.8A patent/EP2564212B1/en active Active
- 2011-05-04 WO PCT/US2011/035140 patent/WO2011152946A1/en active Application Filing
- 2011-05-04 KR KR1020127033395A patent/KR101831708B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| US8680848B2 (en) | 2014-03-25 |
| US20110298448A1 (en) | 2011-12-08 |
| EP2564212A1 (en) | 2013-03-06 |
| JP2013527475A (ja) | 2013-06-27 |
| KR20130118223A (ko) | 2013-10-29 |
| KR101831708B1 (ko) | 2018-02-23 |
| WO2011152946A1 (en) | 2011-12-08 |
| EP2564212B1 (en) | 2014-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5837923B2 (ja) | 動きセンサ、方法、および迅速に利得を較正することができる動きセンサを設けるコンピュータ読み取り可能記憶媒体 | |
| JP5730388B2 (ja) | 動きセンサ、方法、および状態チャターを低減した状態プロセッサを有する動きセンサを設けるコンピュータ読み取り可能記憶媒体 | |
| JP6242927B2 (ja) | 動きセンサ、方法、および動きセンサからの検証済み出力信号を有する動きセンサを設けるコンピュータ読み取り可能記憶媒体 | |
| KR101941461B1 (ko) | 모션 검출 회로 및 방법 | |
| KR101995279B1 (ko) | 자기장 센서에 사용되는 한계 신호를 발생시키기 위한 회로들 및 방법들 | |
| US9778326B2 (en) | Circuits and methods for limiting a smallest separation of thresholds in a magnetic field sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140213 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150430 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151009 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5837923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |