JP5836628B2 - 制御系の評価装置および評価方法、並びに、プログラム - Google Patents
制御系の評価装置および評価方法、並びに、プログラム Download PDFInfo
- Publication number
- JP5836628B2 JP5836628B2 JP2011093511A JP2011093511A JP5836628B2 JP 5836628 B2 JP5836628 B2 JP 5836628B2 JP 2011093511 A JP2011093511 A JP 2011093511A JP 2011093511 A JP2011093511 A JP 2011093511A JP 5836628 B2 JP5836628 B2 JP 5836628B2
- Authority
- JP
- Japan
- Prior art keywords
- characteristic
- control system
- fluctuation range
- evaluation
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
Description
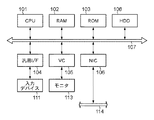
図1のブロック図により実施例の評価装置の構成例を説明する。
図2のブロック図により実施例の評価装置の機能構成例を説明する。つまり、図2に示す評価部31は、CPU101が制御系の評価処理を行う場合の機能構成例を示す。
図3のフローチャートにより制御系の評価処理を説明する。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステムあるいは装置のコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (6)
- 制御器および制御対象を有する制御系を評価する評価装置であって、
前記制御器の周波数特性を取得する第一の取得手段と、
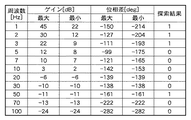
前記制御対象のゲイン特性および位相差特性を取得する第二の取得手段と、
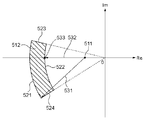
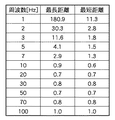
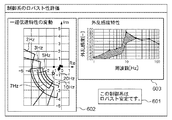
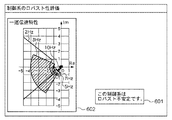
複素座標系において、前記ゲイン特性の変動範囲と前記位相差特性の変動範囲が重なる領域を前記制御対象の周波数特性の変動範囲として、前記周波数特性の変動範囲と前記制御器の周波数特性から前記制御系の一巡伝達特性とその変動範囲を演算する一巡伝達特性の演算手段と、
前記一巡伝達特性とその変動範囲から前記制御系の安定性を評価する評価手段とを有することを特徴とする評価装置。 - 前記評価手段は、前記一巡伝達特性の変動範囲を前記複素座標系に座標変換する変換手段、前記一巡伝達特性とその変動範囲から前記制御系の安定性を判定する判定手段、並びに、前記複素座標系に座標変換された一巡伝達特性の変動範囲、および、前記安定性の判定結果を出力する出力手段を有することを特徴とする請求項1に記載された評価装置。
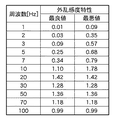
- 前記評価手段は、さらに、前記判定手段により前記制御系が安定と判定された場合に、前記複素座標系に変換された一巡伝達特性の変動範囲から外乱感度特性の変動領域を演算する外乱感度特性の演算手段を有し、
前記出力手段は、さらに前記外乱感度特性の変動領域を出力することを特徴とする請求項2に記載された評価装置。 - 前記判定手段は、ナイキストの安定判別法により前記制御系の安定性を判定することを特徴とする請求項2または請求項3に記載された評価装置。
- 第一および第二の取得手段、演算手段、評価手段を有し、制御器および制御対象を有する制御系を評価する評価装置の評価方法であって、
前記第一の取得手段が、前記制御器の周波数特性を取得し、
前記第二の取得手段が、前記制御対象のゲイン特性および位相差特性を取得し、
前記演算手段が、複素座標系において、前記ゲイン特性の変動範囲と前記位相差特性の変動範囲が重なる領域を前記制御対象の周波数特性の変動範囲として、前記周波数特性の変動範囲と前記制御器の周波数特性から前記制御系の一巡伝達特性とその変動範囲を演算し、
前記評価手段が、前記一巡伝達特性とその変動範囲から前記制御系の安定性を評価することを特徴とする評価方法。 - コンピュータを請求項1から請求項4の何れか一項に記載された評価装置の各手段として機能させることを特徴とするプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011093511A JP5836628B2 (ja) | 2011-04-19 | 2011-04-19 | 制御系の評価装置および評価方法、並びに、プログラム |
| US13/421,973 US9075403B2 (en) | 2011-04-19 | 2012-03-16 | Estimation apparatus for control system and method therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011093511A JP5836628B2 (ja) | 2011-04-19 | 2011-04-19 | 制御系の評価装置および評価方法、並びに、プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012226550A JP2012226550A (ja) | 2012-11-15 |
| JP5836628B2 true JP5836628B2 (ja) | 2015-12-24 |
Family
ID=47021937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011093511A Active JP5836628B2 (ja) | 2011-04-19 | 2011-04-19 | 制御系の評価装置および評価方法、並びに、プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9075403B2 (ja) |
| JP (1) | JP5836628B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023031904A (ja) * | 2021-08-26 | 2023-03-09 | いすゞ自動車株式会社 | 情報処理装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6311136B1 (en) * | 1997-11-26 | 2001-10-30 | Invensys Systems, Inc. | Digital flowmeter |
| JP3219245B2 (ja) * | 1998-08-13 | 2001-10-15 | 株式会社日立国際電気 | 温度制御シミュレーション方法及び温度制御シミュレーション装置 |
| JP4144378B2 (ja) * | 2003-02-28 | 2008-09-03 | ソニー株式会社 | 画像処理装置および方法、記録媒体、並びにプログラム |
| US7031095B2 (en) * | 2004-07-29 | 2006-04-18 | Samsung Electronics Co., Ltd. | Servo controller method and apparatus for high tracks per inch hard disk drives using a delay accomodating state estimator |
| US7532679B2 (en) * | 2004-08-12 | 2009-05-12 | Texas Instruments Incorporated | Hybrid polar/cartesian digital modulator |
| US7643602B2 (en) * | 2005-09-30 | 2010-01-05 | Freescale Semiconductor, Inc. | Method and system for estimating frequency offsets |
| JP4751192B2 (ja) * | 2005-12-12 | 2011-08-17 | 本田技研工業株式会社 | 移動ロボット |
| WO2007132911A1 (ja) * | 2006-05-17 | 2007-11-22 | Nec Corporation | 位置決め制御装置、及び、光ディスク装置 |
| US7617055B2 (en) * | 2006-08-28 | 2009-11-10 | Invensys Systems, Inc. | Wet gas measurement |
| WO2008127793A2 (en) * | 2007-04-11 | 2008-10-23 | Rambus Inc. | Transforming variable domains for linear circuit analysis |
| US7912664B2 (en) * | 2008-09-11 | 2011-03-22 | Northrop Grumman Guidance And Electronics Company, Inc. | Self calibrating gyroscope system |
| JP5206378B2 (ja) * | 2008-12-05 | 2013-06-12 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP5593608B2 (ja) * | 2008-12-05 | 2014-09-24 | ソニー株式会社 | 情報処理装置、メロディーライン抽出方法、ベースライン抽出方法、及びプログラム |
| JP4810582B2 (ja) * | 2009-03-26 | 2011-11-09 | 株式会社東芝 | 移動体画像追尾装置および方法 |
| TWI412730B (zh) * | 2009-06-08 | 2013-10-21 | Wistron Corp | 用於一智慧型手持裝置之測距方法及測距裝置、辨識標的物之位置的方法及電子裝置以及辨識當前位置的方法及電子裝置 |
-
2011
- 2011-04-19 JP JP2011093511A patent/JP5836628B2/ja active Active
-
2012
- 2012-03-16 US US13/421,973 patent/US9075403B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012226550A (ja) | 2012-11-15 |
| US9075403B2 (en) | 2015-07-07 |
| US20120271438A1 (en) | 2012-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ge et al. | Impedance adaptation for optimal robot–environment interaction | |
| Mittal et al. | Topological characterization and early detection of bifurcations and chaos in complex systems using persistent homology | |
| US8812275B2 (en) | Modeling movement of air under a floor of a data center | |
| CN108701251A (zh) | 使用优势估计强化学习 | |
| US10556336B1 (en) | Determining robot inertial properties | |
| JP2017151598A (ja) | 異常判定装置、異常判定プログラム、異常判定システム、及びモータ制御装置 | |
| JP6443165B2 (ja) | 状態推定方法および状態推定装置 | |
| CN110370317B (zh) | 机器人修复方法及装置 | |
| JP5549112B2 (ja) | Pid調整装置およびpid調整プログラム | |
| JP7014095B2 (ja) | 設定支援装置 | |
| JP5836628B2 (ja) | 制御系の評価装置および評価方法、並びに、プログラム | |
| Marques Monteiro et al. | Visuo-dynamic self-modelling of soft robotic systems | |
| Álvarez et al. | Perspectives on control-relevant identification through the use of interactive tools | |
| McDaid et al. | Gain scheduled control of IPMC actuators with ‘model-free’iterative feedback tuning | |
| CN105095555B (zh) | 一种基于速度场无散平滑处理的粒子图像测速方法及装置 | |
| JP5749041B2 (ja) | アクティブフィードバック制御装置及びプログラム | |
| Matušů et al. | Robust stability of fractional order polynomials with complicated uncertainty structure | |
| Ogbemhe et al. | Robot dynamic model: freudenstein-based optimal trajectory and parameter identification | |
| JP5298603B2 (ja) | 結晶粒解析装置、結晶粒解析方法、及びコンピュータプログラム | |
| US10496096B2 (en) | Real time effective mass and moment of inertia measurement | |
| KR20240080126A (ko) | 정보 처리 장치, 기억 매체 및 최적해 탐색 방법 | |
| JP5114674B2 (ja) | 結晶粒解析装置、結晶粒解析方法、及びコンピュータプログラム | |
| JP7014094B2 (ja) | 設定支援装置 | |
| VanDoren | Fundamentals of lambda tuning | |
| CN108241569B (zh) | 一种基于远程可视化技术的用户体验基准评测系统及实现方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150302 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151005 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151104 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5836628 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |