JP5743409B2 - 電気モータ - Google Patents
電気モータ Download PDFInfo
- Publication number
- JP5743409B2 JP5743409B2 JP2010024737A JP2010024737A JP5743409B2 JP 5743409 B2 JP5743409 B2 JP 5743409B2 JP 2010024737 A JP2010024737 A JP 2010024737A JP 2010024737 A JP2010024737 A JP 2010024737A JP 5743409 B2 JP5743409 B2 JP 5743409B2
- Authority
- JP
- Japan
- Prior art keywords
- segment
- segments
- rotor
- brush
- commutator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K23/00—DC commutator motors or generators having mechanical commutator; Universal AC/DC commutator motors
- H02K23/26—DC commutator motors or generators having mechanical commutator; Universal AC/DC commutator motors characterised by the armature windings
- H02K23/28—DC commutator motors or generators having mechanical commutator; Universal AC/DC commutator motors characterised by the armature windings having open windings, i.e. not closed within the armatures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K23/00—DC commutator motors or generators having mechanical commutator; Universal AC/DC commutator motors
- H02K23/26—DC commutator motors or generators having mechanical commutator; Universal AC/DC commutator motors characterised by the armature windings
- H02K23/30—DC commutator motors or generators having mechanical commutator; Universal AC/DC commutator motors characterised by the armature windings having lap or loop windings
Description
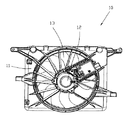
11:ハウジング
12:電気モータ
13:ファン
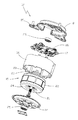
14:第1エンドキャップ
15:回転子
16:固定子ハウジング
17:ブラシカード(ブラシギア)
18:第2エンドキャップ
19:装着突起
20:永久磁石
21:シャフト
22:コア
23:整流子
24:巻線
25:ベアリング
26:ブラシ
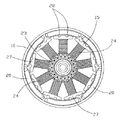
27:T字型の歯
28:溝
E1〜E6:イコライザ
C1〜C24:整流子セグメント
B1〜B4:ブラシ
W1〜W12:巻線
T1〜T12:歯
Claims (8)
- 2n個の固定子極を有する永久磁石固定子を収容する固定子ハウジング(16)と、
前記固定子に直面して回転可能に装着された回転子(15)であって、シャフト(21)、シャフトに嵌合された回転子コア(22)、回転子コア(22)の一端に隣接してシャフトに嵌合された整流子(23)、回転子コア(22)の歯(27)の周りに巻かれ、整流子(23)のセグメントに電気的に接続された回転子巻線(24)を含むような回転子(15)と、
前記回転子巻線(24)へ電力を伝達するために前記整流子(23)にスライド接触する複数のブラシ(26)を含むブラシギアと、
を備え、前記回転子コア(22)は、m個の回転子歯(27)を有し、前記回転子巻線(24)は、m個のコイルを有し、各コイルは、前記回転子歯(27)の各1つの周りに巻かれ、各回転子歯(27)は、前記コイルの1つを支持し、前記整流子(23)は、2m個のセグメントを有し、各コイルは、整流子セグメントの各対に接続され、少なくとも1つのセグメントは、コイルの1つのみに直結され、少なくとも1つのセグメントは、コイルの2つに直結され、そして少なくとも1つのセグメントは、どのコイルにも直結されないようにし、
前記コイルのうちの複数が、順方向に巻かれ、前記コイルの残りが、逆方向に巻かれ、逆方向に巻かれたコイルの1つが、2つの順方向に巻かれたコイルにそれぞれ接続された2つの隣接セグメントの間に接続され、順方向に巻かれたコイルの1つが、逆方向に巻かれたコイルにそれぞれ接続された2つの隣接セグメントの間に接続されたDCモータ。 - 各コイルは、隣接整流子セグメントの各対に接続される、請求項1に記載のDCモータ。
- 同じ整流子セグメントに直結される2つのコイルは、逆方向に巻かれる、請求項1又は2に記載のDCモータ。
- 前記ブラシギアは、n対未満のブラシ(26)を有する、請求項1から3のいずれかに記載のDCモータ。
- 前記回転子(15)は、前記整流子(23)の選択されたセグメントを電気的に一緒に接続する複数のイコライザを有し、どのコイルにも直結されない少なくとも1つのセグメントは、各イコライザを経て少なくとも1つのコイルに接続される、請求項4に記載のDCモータ。
- 前記DCモータは、6個の固定子極(20)と、9個の歯(27)と、前記整流子(23)の周囲に不均一に離間された4個のブラシ(26)とを有し、前記整流子は、18個のセグメント及び6個のイコライザを有し、各イコライザは、3個のセグメントの各グループを電気的に一緒に接続し、前記3個のセグメントは、前記整流子(23)の周囲に均一に離間される、請求項5に記載のDCモータ。
- 順方向に巻かれた前記コイルの少なくとも3つは、3個の隣接する歯にそれぞれ巻かれ、3つの順方向に巻かれた前記コイルは、前記整流子の6個のセグメントに電気的に接続される、請求項6に記載のDCモータ。
- 乗物の内燃機関のための冷却ファンモジュールにおいて、ファンと、ハウジングと、請求項1から7のいずれかに記載のDCモータとを備え、前記ファンが前記DCモータにより駆動され、そして前記DCモータが前記ハウジングにより支持されるような冷却ファンモジュール。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN200910105141.9 | 2009-01-19 | ||
| CN2009101051419A CN101783567B (zh) | 2009-01-19 | 2009-01-19 | 一种直流电机及使用该直流电机的冷却风扇模组 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010166806A JP2010166806A (ja) | 2010-07-29 |
| JP5743409B2 true JP5743409B2 (ja) | 2015-07-01 |
Family
ID=42282819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010024737A Active JP5743409B2 (ja) | 2009-01-19 | 2010-01-19 | 電気モータ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8125112B2 (ja) |
| JP (1) | JP5743409B2 (ja) |
| CN (1) | CN101783567B (ja) |
| DE (1) | DE102010004877A1 (ja) |
| IN (1) | IN2010KO00043A (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102403858B (zh) * | 2010-09-17 | 2016-01-06 | 德昌电机(深圳)有限公司 | 一种永磁直流有刷电机 |
| CN102142723A (zh) * | 2010-11-22 | 2011-08-03 | 常州市裕成富通电机有限公司 | 电动车用电机定子及其绕组的半匝绕制方法 |
| DE102012100666A1 (de) * | 2011-01-27 | 2012-08-02 | Johnson Electric S.A. | Elektromotor |
| CN201975875U (zh) * | 2011-01-27 | 2011-09-14 | 德昌电机(深圳)有限公司 | 电动工具及其永磁电机 |
| CN102280984B (zh) * | 2011-08-11 | 2013-05-08 | 张家港朗信电气有限公司 | 汽车发动机冷却风扇用直流电机 |
| CN102983645B (zh) * | 2011-09-02 | 2017-09-01 | 德昌电机(深圳)有限公司 | 有刷电机、风扇、电机转子及其形成方法 |
| WO2013056024A1 (en) * | 2011-10-12 | 2013-04-18 | Gogoro, Inc. | Electric devices |
| DE102014010696A1 (de) * | 2014-07-18 | 2016-01-21 | Brose Fahrzeugteile GmbH & Co. Kommanditgesellschaft, Würzburg | Kühlerzarge und Verfahren zur Herstellung einer Kühlerzarge |
| US11139707B2 (en) | 2015-08-11 | 2021-10-05 | Genesis Robotics And Motion Technologies Canada, Ulc | Axial gap electric machine with permanent magnets arranged between posts |
| CN108028554B (zh) | 2015-08-11 | 2021-04-23 | 詹尼斯机器人移动技术加拿大公司 | 电机 |
| US10404147B2 (en) * | 2016-03-28 | 2019-09-03 | Johnson Electric International AG | Stator, single phase motor and fan |
| CN105790523A (zh) * | 2016-05-11 | 2016-07-20 | 山东理工大学 | 电磁与内置径向永磁钢混合励磁发电机生产方法 |
| US11043885B2 (en) | 2016-07-15 | 2021-06-22 | Genesis Robotics And Motion Technologies Canada, Ulc | Rotary actuator |
| CN109716622A (zh) * | 2016-09-21 | 2019-05-03 | 爱信艾达株式会社 | 电动马达用的转子 |
| CN107104535A (zh) * | 2017-05-19 | 2017-08-29 | 钱士祥 | 低压四极三段式直流电动机 |
| US20200204026A1 (en) * | 2018-12-20 | 2020-06-25 | Massachusetts Institute Of Technology | Asymmetrical Winding Configuration For An Electric Motor Drive |
| CN112910192B (zh) * | 2021-02-25 | 2022-05-24 | 浙江宝捷机电有限公司 | 一种电机铁芯及其加工装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4583016A (en) * | 1983-06-28 | 1986-04-15 | Itsuki Ban | Direct current motor |
| JPS61112556A (ja) * | 1984-10-11 | 1986-05-30 | Mitsubishi Electric Corp | 直流回転機 |
| JP2535181B2 (ja) * | 1987-09-30 | 1996-09-18 | 株式会社シコー技研 | 電機子巻線が重畳しない5相の直流電動機 |
| IT1309097B1 (it) | 1999-10-11 | 2002-01-16 | Gate Spa | Indotto e pacco di lamierini di indotto per una macchina elettrica, in particolare per un motore in corrente continua con collettore. |
| US6891304B1 (en) * | 2000-09-06 | 2005-05-10 | Quebec Metal Powders Limited | Brush DC motors and AC commutator motor structures with concentrated windings |
| CN1203604C (zh) * | 2003-05-19 | 2005-05-25 | 清华大学 | 多相直流电动机的电源换向装置 |
| JP4025250B2 (ja) * | 2003-06-17 | 2007-12-19 | ヤマハモーターエレクトロニクス株式会社 | 直流電動機 |
| DE10361811A1 (de) * | 2003-12-30 | 2005-07-28 | Robert Bosch Gmbh | Elektrische Maschine mit Kommutatorläufer |
| JP4768246B2 (ja) * | 2004-09-24 | 2011-09-07 | ヤマハモーターエレクトロニクス株式会社 | ブラシ付きインナーマグネットモータ |
| DE102004055317A1 (de) * | 2004-11-16 | 2006-05-24 | Bosch Rexroth Aktiengesellschaft | Elektrische Drehfeldmaschine und Primärteil |
| JP2007202391A (ja) * | 2005-12-28 | 2007-08-09 | Mitsuba Corp | 速度切り替え式モータ |
| JP5032264B2 (ja) * | 2006-10-23 | 2012-09-26 | アスモ株式会社 | 直流モータ |
| JP4886469B2 (ja) * | 2006-10-30 | 2012-02-29 | 株式会社ミツバ | 直流モータのアーマチュア、直流モータ及び直流モータのアーマチュア巻線方法 |
| CN101267130B (zh) * | 2007-03-16 | 2013-03-13 | 德昌电机股份有限公司 | 电枢叠片 |
-
2009
- 2009-01-19 CN CN2009101051419A patent/CN101783567B/zh active Active
-
2010
- 2010-01-18 DE DE102010004877A patent/DE102010004877A1/de not_active Withdrawn
- 2010-01-19 US US12/689,828 patent/US8125112B2/en not_active Expired - Fee Related
- 2010-01-19 IN IN43KO2010 patent/IN2010KO00043A/en unknown
- 2010-01-19 JP JP2010024737A patent/JP5743409B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101783567A (zh) | 2010-07-21 |
| JP2010166806A (ja) | 2010-07-29 |
| CN101783567B (zh) | 2013-02-13 |
| US20100183460A1 (en) | 2010-07-22 |
| US8125112B2 (en) | 2012-02-28 |
| DE102010004877A1 (de) | 2010-07-29 |
| IN2010KO00043A (ja) | 2015-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5743409B2 (ja) | 電気モータ | |
| JP5591460B2 (ja) | 電気モータ | |
| US7122933B2 (en) | Reduced coil segmented stator | |
| US8378547B2 (en) | Electric motor | |
| US7859164B2 (en) | Armature laminations | |
| US8125117B2 (en) | Electric motor and rotor therefor | |
| JP5824644B2 (ja) | 直流モータ | |
| CN104426315B (zh) | 三相电磁电机 | |
| US8487567B2 (en) | Two-phase BLDC motor | |
| JP4395974B2 (ja) | ブラシ付き直流モータ | |
| JP5722568B2 (ja) | モータ | |
| US7528517B2 (en) | Distribution of motor heat sources | |
| KR101200505B1 (ko) | 직류 모터 | |
| JP7109886B2 (ja) | 永久磁石直流モータ及び冷却ファンモジュール | |
| JP2019009988A (ja) | ステータアセンブリ | |
| JP7280070B2 (ja) | ステータ及びブラシレスモータ | |
| JP6283451B1 (ja) | 回転電機 | |
| JP2003143790A (ja) | 電機子及び電機子の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150330 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5743409 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |