JP5743394B2 - 風車及び風車を風向に整合させる方法 - Google Patents
風車及び風車を風向に整合させる方法 Download PDFInfo
- Publication number
- JP5743394B2 JP5743394B2 JP2009246425A JP2009246425A JP5743394B2 JP 5743394 B2 JP5743394 B2 JP 5743394B2 JP 2009246425 A JP2009246425 A JP 2009246425A JP 2009246425 A JP2009246425 A JP 2009246425A JP 5743394 B2 JP5743394 B2 JP 5743394B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- nacelle
- windmill
- signal
- differential pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 23
- 230000003044 adaptive effect Effects 0.000 claims description 2
- 238000013528 artificial neural network Methods 0.000 claims description 2
- 238000012937 correction Methods 0.000 description 8
- 230000004044 response Effects 0.000 description 6
- 238000009530 blood pressure measurement Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
- F03D7/042—Automatic control; Regulation by means of an electrical or electronic controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0204—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for orientation in relation to wind direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/80—Diagnostics
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/301—Pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/301—Pressure
- F05B2270/3015—Pressure differential
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/324—Air pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/80—Devices generating input signals, e.g. transducers, sensors, cameras or strain gauges
- F05B2270/802—Calibration thereof
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B10/00—Integration of renewable energy sources in buildings
- Y02B10/30—Wind power
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Description
Claims (14)
- 風車を風向に整合させる方法において、
風車のナセル(1)の第1の側(17)において少なくとも第1の圧力を測定するステップと、
測定された第1の圧力と、第2の圧力との差圧を決定するステップと、
決定された差圧に基づいてナセル(1)を回転させるステップを含むものであって、
2つ以上の圧力がナセルの第1の側(17)において測定されかつ/又は2つ以上の圧力がナセルの第2の側(19)において測定され、差圧を決定する前に、ナセルの第1の側において測定された圧力が組み合わされかつ/又はナセルの第2の側において測定された圧力が組み合わされることを特徴とする、風車を風向に整合させる方法。 - 第2の圧力が、第1の側(17)とは反対側に配置された、風車のナセルの第2の側(19)において測定されることを特徴とする、請求項1記載の方法。
- 第2の圧力が、風に対する風車の正確な整合に対応するように較正された基準圧力であることを特徴とする、請求項1記載の方法。
- 差圧を決定する前に、測定された第1の圧力及び/又は測定された第2の圧力を所定の時間にわたって積分することを特徴とする、請求項1から3までのいずれか1項記載の方法。
- 2つ以上の圧力がナセル(1)の第1の側(17)において測定されかつ/又は2つ以上の圧力がナセル(1)の第2の側(19)において測定され、2つ以上の差圧が決定され、組み合わされた差圧に基づいてナセル(1)を回転させる前に、決定された差圧が組み合わされることを特徴とする、請求項1から4までのいずれか1項記載の方法。
- 差圧又は組み合わされた差圧に基づいてナセル(1)を回転させることが、差圧又は組み合わされた差圧が所定の最大限界に到達するか又は所定の最大限界を超えた場合に開始されることを特徴とする、請求項1から5までのいずれか1項記載の方法。
- 差圧又は組み合わされた差圧に基づいてナセル(1)を回転させることが、差圧又は組み合わされた差圧が所定の最小限界に到達するか又は所定の最小限界よりも低下した場合に停止させられることを特徴とする、請求項6記載の方法。
- 風速及び/又は風車のロータ(5)の回転速度に従って、差圧及び/又は所定の最大限界及び/又は所定の最小限界を較正するステップを含むことを特徴とする、請求項7記載の方法。
- 風車において、
第1の側(17)と、該第1の側(17)とは反対側に配置された第2の側(19)とを備えるナセル(1)が設けられており、
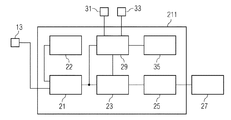
風向に対する風車の不整合を決定しかつ風向に対して風車を再整合させるための風車の回転を表す制御信号を提供するように設計されたヨー整合制御装置(11,11′,111,211)が設けられており、
制御信号に基づいて風車を風向に対して整合させるように設計された、制御信号を受信するための、ヨー整合制御装置(11,11′,111,211)に接続されたヨー駆動装置(27)が設けられている形式のものにおいて、
少なくとも1つの第1の圧力計(13)がナセル(1)の第1の側(17)に配置されており、第1の圧力計(13)が第1の圧力信号を提供し、
ヨー整合制御装置(11,11′,111,211)が、第1の圧力信号を受信するために少なくとも1つの第1の圧力計(13)に接続されており、また、第1の圧力信号と第2の圧力信号との差圧を決定し且つ決定された差圧に基づいて風車の回転を表す制御信号を出力するように設計されており、
2つ以上の圧力計(13,41,15,43)がナセル(1)の第1の側(17)に配置されておりかつ/又は2つ以上の圧力計(15,43)がナセル(1)の第2の側(19)に配置されており、各圧力計(13,41,15,43)が圧力信号を提供し、
ヨー整合制御装置(111)が、個々の圧力信号を受信するために全ての圧力計(13,41,15,43)に接続されており、また、差圧を決定する前に、第1の組み合わされた圧力信号を形成するためにナセル(1)の第1の側(17)に配置された圧力計(13,41)からの圧力信号を組み合わせかつ/又は第2の組み合わされた圧力信号を形成するためにナセル(1)の第2の側(19)に配置された圧力計(15,43)からの圧力信号を組み合わせるように設計されていることを特徴とする、風車。 - 少なくとも1つの第2の圧力計(15)がナセル(1)の第2の側(19)に配置されており、第2の圧力計(15)が第2の圧力信号を提供し、
ヨー整合制御装置(11,11′,111,211)が、第2の圧力信号を受信するために少なくとも1つの第2の圧力計(15)に接続されており、また、第1の圧力信号と第2の圧力信号との差圧を決定し且つ決定された差圧に基づいて風車の回転を表す制御信号を出力するように設計されていることを特徴とする、請求項9記載の風車。 - 風に対する風車の正確な整合に対応するように較正された基準圧力を含む基準圧力リポジトリが設けられており、
ヨー整合制御装置(211)が、第2の圧力信号としての基準圧力を受信するために基準圧力リポジトリ(22)に接続されていることを特徴とする、請求項10記載の風車。 - 2つ以上の圧力計(13,41)がナセル(1)の第1の側(17,19)に配置されておりかつ/又は2つ以上の圧力計(15,43)がナセル(1)の第2の側(19)に配置されており、各圧力計(13,41,15,43)が圧力信号を提供し、
ヨー整合制御装置(111)が、個々の圧力信号を受信するために全ての圧力計(13,41,15,43)に接続されており、また、多数の差圧を決定し、組み合わされた差圧を形成するために決定された差圧を組み合わせ、組み合わされた差圧に基づいて風車の回転を表す制御信号を出力するように設計されていることを特徴とする、請求項9から11までのいずれか1項記載の風車。 - ヨー整合制御装置(11,11′,111,211)が、較正ユニット(29)を有するか又は較正ユニット(29)に接続されており、該較正ユニットが、風速及び/又はロータの回転速度に従って、第1の圧力信号と第2の圧力信号との差及び/又はナセル(1)の回転を開始するための所定の最大限界及び/又はナセル(1)の回転を停止させるための所定の最小限界を較正するように設計されていることを特徴とする、請求項9から12までのいずれか1項記載の風車。
- ヨー整合制御装置(11,11′,111,211)が、PID制御器、ニューラルネットワーク、ファジイ論理制御装置、又は適応制御装置を含むことを特徴とする、請求項9から13までのいずれか1項記載の風車。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08018796.6A EP2182205B1 (en) | 2008-10-28 | 2008-10-28 | Wind turbine arrangement and method for aligning a wind turbine with the wind direction |
| EP08018796.6 | 2008-10-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010106838A JP2010106838A (ja) | 2010-05-13 |
| JP5743394B2 true JP5743394B2 (ja) | 2015-07-01 |
Family
ID=41094440
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009246425A Expired - Fee Related JP5743394B2 (ja) | 2008-10-28 | 2009-10-27 | 風車及び風車を風向に整合させる方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8310073B2 (ja) |
| EP (1) | EP2182205B1 (ja) |
| JP (1) | JP5743394B2 (ja) |
| CN (1) | CN101725468B (ja) |
| CA (1) | CA2683500C (ja) |
| DK (1) | DK2182205T3 (ja) |
| NZ (1) | NZ580114A (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2166223B1 (en) * | 2008-09-17 | 2011-11-16 | Siemens Aktiengesellschaft | Method for aligning a component into a wind direction and sensor for determining misalignment of the component relative to a wind direction |
| GB2482661A (en) * | 2010-07-26 | 2012-02-15 | Vestas Wind Sys As | Upwind wind turbine with tower-mounted air pressure sensors |
| EP2572426B1 (en) * | 2010-08-13 | 2014-06-18 | Siemens Aktiengesellschaft | Arrangement for generating a control signal for controlling a power output of a power generation system |
| CN102444543B (zh) * | 2010-09-30 | 2013-10-09 | 华锐风电科技(集团)股份有限公司 | 判断非必要迎风状况的方法和装置、对风跟踪的方法和系统 |
| CN102352814B (zh) * | 2011-06-21 | 2013-07-31 | 北京交通大学 | 一种大型直驱风电机组的最大功率跟踪方法 |
| KR101314811B1 (ko) * | 2011-09-23 | 2013-10-04 | 삼성중공업 주식회사 | 풍력 발전기의 풍향 풍속 측정장치 |
| CN103867382A (zh) * | 2012-12-18 | 2014-06-18 | 苏州工业园区新宏博通讯科技有限公司 | 风力发电系统 |
| CN104454350B (zh) | 2013-09-23 | 2019-01-08 | 通用电气公司 | 风力涡轮机及其降低转子不平衡载荷的控制方法 |
| CN103758700B (zh) * | 2014-02-24 | 2016-07-06 | 国电联合动力技术有限公司 | 一种校准风机对风偏差的方法 |
| CN103899481A (zh) * | 2014-04-08 | 2014-07-02 | 上海电机学院 | 一种风机偏航系统及偏航方法 |
| ES2929780T3 (es) * | 2016-03-30 | 2022-12-01 | Siemens Gamesa Renewable Energy As | Método y disposición para calibración continua de una medición de dirección del viento |
| US11168664B2 (en) | 2016-03-31 | 2021-11-09 | Vestas Wind Systems A/S | Control method for a wind turbine |
| CN106014878B (zh) * | 2016-06-30 | 2018-11-20 | 华北电力科学研究院有限责任公司 | 风力发电机组偏航系统动作误差的测试方法及系统 |
| DK179188B1 (en) * | 2016-07-06 | 2018-01-22 | Envision Energy (Jiangsu) Co Ltd | Wind turbine and a method of operating a wind turbine |
| EP3619427A1 (en) * | 2017-07-07 | 2020-03-11 | Siemens Gamesa Renewable Energy A/S | Determining a wind speed value |
| DE102018001270A1 (de) * | 2018-02-19 | 2019-08-22 | Senvion Gmbh | Verfahren und System zur Kalibrierung eines Anemotropometers |
| DE102018001269A1 (de) | 2018-02-19 | 2019-08-22 | Senvion Gmbh | Verfahren und System zum Ermitteln einer Ausrichtungskorrekturfunktion |
| CN109324503B (zh) * | 2018-08-28 | 2022-02-15 | 南京理工大学 | 基于鲁棒积分的多层神经网络电机系统控制方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3000678A1 (de) | 1980-01-10 | 1981-07-16 | Erno Raumfahrttechnik Gmbh, 2800 Bremen | Vorrichtung zur bestimmung der windenergie zur regelung von windkraftwerken |
| JPH0762471B2 (ja) * | 1987-09-18 | 1995-07-05 | 株式会社ユアサコーポレーション | 風力発電塔マスト・トップの方位制御装置 |
| CN1205762A (zh) * | 1995-12-18 | 1999-01-20 | 克瓦那涡轮机股份公司 | 风力涡轮机的偏转装置 |
| SE510110C2 (sv) | 1995-12-18 | 1999-04-19 | Kvaerner Asa | Girsystem för vindturbin |
| JP3978186B2 (ja) | 2001-12-28 | 2007-09-19 | 三菱重工業株式会社 | アップウィンド型風車及びその運転方法 |
| JP4607450B2 (ja) | 2003-12-26 | 2011-01-05 | 大和ハウス工業株式会社 | プロペラ型風力発電システム |
| JP4589633B2 (ja) | 2004-01-29 | 2010-12-01 | 富士重工業株式会社 | 水平軸風車及び水平軸風車の制御方法 |
| JP2006022792A (ja) * | 2004-07-09 | 2006-01-26 | Topy Ind Ltd | エネルギー効率を高めることができる風力発電システムおよび風力発電システム制御方法 |
| EP2017468A1 (en) * | 2007-07-20 | 2009-01-21 | Siemens Aktiengesellschaft | Method for wind turbine yaw control |
| US7895018B2 (en) * | 2007-08-10 | 2011-02-22 | General Electric Company | Event monitoring via combination of signals |
| US20100119370A1 (en) * | 2009-11-17 | 2010-05-13 | Modi Vivendi As | Intelligent and optimized wind turbine system for harsh environmental conditions |
| JP5449060B2 (ja) * | 2010-06-30 | 2014-03-19 | 三菱重工業株式会社 | 風力発電装置 |
-
2008
- 2008-10-28 EP EP08018796.6A patent/EP2182205B1/en not_active Not-in-force
- 2008-10-28 DK DK08018796.6T patent/DK2182205T3/en active
-
2009
- 2009-10-01 NZ NZ580114A patent/NZ580114A/en not_active IP Right Cessation
- 2009-10-23 US US12/604,452 patent/US8310073B2/en not_active Expired - Fee Related
- 2009-10-26 CA CA2683500A patent/CA2683500C/en not_active Expired - Fee Related
- 2009-10-27 JP JP2009246425A patent/JP5743394B2/ja not_active Expired - Fee Related
- 2009-10-28 CN CN200910208133.7A patent/CN101725468B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101725468A (zh) | 2010-06-09 |
| CN101725468B (zh) | 2015-07-22 |
| JP2010106838A (ja) | 2010-05-13 |
| US8310073B2 (en) | 2012-11-13 |
| EP2182205B1 (en) | 2016-03-09 |
| CA2683500C (en) | 2017-03-07 |
| NZ580114A (en) | 2010-09-30 |
| CA2683500A1 (en) | 2010-04-28 |
| EP2182205A1 (en) | 2010-05-05 |
| US20100102559A1 (en) | 2010-04-29 |
| DK2182205T3 (en) | 2016-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5743394B2 (ja) | 風車及び風車を風向に整合させる方法 | |
| DK201700026Y4 (da) | Apparatur til justering af yaw for en vindturbine | |
| DK2075561T3 (en) | Methods and apparatus for error reduction in rotorbelastningsmålinger | |
| US11231016B2 (en) | Method and arrangement for continuous calibration of a wind direction measurement | |
| US10012209B2 (en) | Method of detecting a degree of yaw error of a wind turbine | |
| US8410625B2 (en) | Method for wind turbine yaw control | |
| CN107820541B (zh) | 风力涡轮机叶片载荷传感系统 | |
| US8702388B2 (en) | Calibration of blade load sensors | |
| DK2547905T3 (en) | A method of operating a wind power installation | |
| CN107709763B (zh) | 防止风力涡轮机不对准的情况 | |
| EP2653722B1 (en) | Yaw error sensor, wind turbine and yaw angle adjustment | |
| US20040151584A1 (en) | Method and apparatus for wind turbine rotor load control | |
| US20120183399A1 (en) | Method and apparatus for balancing wind turbines | |
| US20120211986A1 (en) | Wind sensor system using blade signals | |
| US20170292501A1 (en) | System and Method for Auto-Calibrating a Load Sensor System of a Wind Turbine | |
| WO2008087180A2 (en) | Wind turbine and method for mitigating the asymmetric loads endured by the rotor or the wind turbine | |
| GB2477594A (en) | Iterative method for determining maximum lift pitch angle in a wind turbine | |
| EP3990777A1 (en) | Controlling power output of a wind turbine at below-rated wind speed | |
| US20220316442A1 (en) | Correcting blade pitch in a wind turbine | |
| CN115076026A (zh) | 考虑安装偏角的风力发电机组叶根载荷应变计标定计算方法 | |
| WO2024002450A1 (en) | Wind turbine wake loss control using detected downstream wake loss as a function of wind direction | |
| CN112145358A (zh) | 风力发电机组及其风玫瑰图的校准方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101227 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101228 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120828 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130919 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130930 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131226 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140109 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140130 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140204 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140228 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140305 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140811 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150330 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5743394 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |