JP5743311B2 - 超音波診断装置 - Google Patents
超音波診断装置 Download PDFInfo
- Publication number
- JP5743311B2 JP5743311B2 JP2010237140A JP2010237140A JP5743311B2 JP 5743311 B2 JP5743311 B2 JP 5743311B2 JP 2010237140 A JP2010237140 A JP 2010237140A JP 2010237140 A JP2010237140 A JP 2010237140A JP 5743311 B2 JP5743311 B2 JP 5743311B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- physical quantity
- unit
- elasticity
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011156 evaluation Methods 0.000 claims description 65
- 239000000523 sample Substances 0.000 claims description 43
- 230000006835 compression Effects 0.000 claims description 10
- 238000007906 compression Methods 0.000 claims description 10
- 238000012935 Averaging Methods 0.000 claims description 5
- 238000002604 ultrasonography Methods 0.000 claims description 5
- 238000012545 processing Methods 0.000 description 34
- 230000006870 function Effects 0.000 description 18
- 238000012986 modification Methods 0.000 description 18
- 230000004048 modification Effects 0.000 description 18
- 230000005540 biological transmission Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 12
- 238000013459 approach Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000002040 relaxant effect Effects 0.000 description 2
- 239000010936 titanium Substances 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
Images


















Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
(第一実施形態)
先ず、第一実施形態について図1〜図10に基づいて説明する。図1に示す超音波診断装置1は、超音波プローブ2、送受信部3、Bモードデータ処理部4、物理量データ処理部5、表示制御部6、表示部7、制御部8、操作部9及び記憶部10を備える。
Y=1.0−|log10|Ra||・・・(式1)
この(式1)によって得られるYは、面単位で得られる値であり、前記クオリティ値Qの一例である。
RD=k1×SD2+k2×SD4・・・(式2)
ただし、上記(式2)において、k1,k2は重み付け係数である。
次に、第二実施形態について説明する。なお、以下の説明では、第一実施形態と異なる事項について説明する。
2 超音波プローブ
5 物理量データ処理部(弾性データ作成部)
7 表示部
8 制御部(走査制御部)
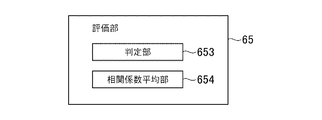
65 評価部
66 データ置換部
Claims (9)
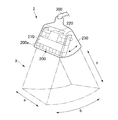
- 三次元領域の超音波の走査を行なう超音波プローブと、
該超音波プローブで受信したエコー信号に基づいて、生体組織の弾性に関する弾性データを前記三次元領域における各面について作成する弾性データ作成部と、
前記弾性データに対して表示価値の有無に関する評価を行なう評価部と、
一の面において表示価値が無いと評価された前記弾性データを、他の面において表示価値が有ると評価された弾性データに基づく置換データに置換するデータ置換部と、
を備え、
前記評価部は、前記弾性データに対して各面毎に評価を行ない、
前記データ置換部は、面単位で前記弾性データの置換を行ない、
前記置換データは、表示価値が有ると評価された弾性データであって、前記一の面と最も近い面を含む複数面の弾性データを重み付け加算して得られたデータである
ことを特徴とする超音波診断装置。 - 三次元領域の超音波の走査を行なう超音波プローブと、
該超音波プローブで受信したエコー信号に基づいて、生体組織の弾性に関する弾性データを前記三次元領域における各面について作成する弾性データ作成部と、
前記弾性データに対して表示価値の有無に関する評価を行なう評価部と、
一の面において表示価値が無いと評価された前記弾性データを、他の面において表示価値が有ると評価された弾性データに基づく置換データに置換するデータ置換部と、
を備え、
前記評価部は、前記弾性データに対して各座標点毎に評価を行ない、
前記データ置換部は、座標点単位で前記弾性データの置換を行なう
ことを特徴とする超音波診断装置。 - 前記置換データは、表示価値が有ると評価された複数の座標点の弾性データを重み付け加算して得られたデータであって、前記複数の座標点の弾性データには、表示価値が有ると評価された弾性データのうち、前記一の面において表示価値が無いと評価された座標点の弾性データと最も距離が近い弾性データが含まれる
ことを特徴とする請求項2に記載の超音波診断装置。 - 前記置換データは、表示価値が有ると評価された弾性データのうち、前記一の面において表示価値が無いと評価された座標点の弾性データと最も距離が近い弾性データであることを特徴とする請求項2に記載の超音波診断装置。
- 三次元領域の超音波の走査を行なう超音波プローブと、
該超音波プローブで受信したエコー信号に基づいて、生体組織における各部の弾性に関する物理量のデータからなる物理量データを前記三次元領域における各面について作成する物理量データ作成部と、
前記物理量データに対して表示価値の有無に関する評価を行なう評価部と、
一の面において表示価値が無いと評価された前記物理量データを、他の面において表示価値が有ると評価された物理量データに基づく置換データに置換するデータ置換部と、
を備え、
前記評価部は、前記物理量データにおける物理量の平均を算出する物理量平均部と、該物理量平均部による算出値を、予め設定された物理量の平均値であって、前記生体組織の弾性を正確に反映した弾性画像を得ることができる強さで生体組織への圧迫と弛緩とが行われた場合に得られる物理量の平均値と比較する比較部と、該比較部による比較結果に基づいて前記評価を行なう判定部と、を有する
ことを特徴とする超音波診断装置。 - 三次元領域の超音波の走査を行なう超音波プローブと、
該超音波プローブで受信した同一音線上の時間的に異なる二つのエコー信号に相関ウィンドウを設定し、該相関ウィンドウ間で相関演算を行なって生体組織における各部の弾性に関する物理量データを前記三次元領域における各面について作成する物理量データ作成部と、
前記物理量データに対して表示価値の有無に関する評価を行なう評価部と、
一の面において表示価値が無いと評価された前記物理量データを、他の面において表示価値が有ると評価された物理量データに基づく置換データに置換するデータ置換部と、
を備え、
前記評価部は、所定の閾値以上の相関係数の相関演算が行われた相関ウィンドウについて得られた前記物理量データにおける物理量の平均を算出する物理量平均部と、予め設定された前記物理量の平均値に対する前記物理量平均部による算出値の比を算出する比算出部と、前記相関ウィンドウ間の相関演算における相関係数の平均を算出する相関係数平均部と、前記比算出部の算出値と前記相関係数平均部の算出値とを乗算する乗算部と、該乗算部による算出値に基づいて前記評価を行なう判定部と、を有する
ことを特徴とする超音波診断装置。 - 前記評価部は、前記物理量データに対して各面毎に評価を行ない、
前記データ置換部は、面単位で前記物理量データの置換を行なう
ことを特徴とする請求項5又は6に記載の超音波診断装置。 - 前記置換データは、表示価値が有ると評価された物理量データであって、前記一の面と最も近い面の物理量データであることを特徴とする請求項7に記載の超音波診断装置。
- 前記弾性データ又は前記物理量データと、前記置換データに基づいて作成された弾性画像を表示する表示部を備えることを特徴とする請求項1〜8のいずれか一項に記載の超音波診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010237140A JP5743311B2 (ja) | 2010-10-22 | 2010-10-22 | 超音波診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010237140A JP5743311B2 (ja) | 2010-10-22 | 2010-10-22 | 超音波診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012085945A JP2012085945A (ja) | 2012-05-10 |
| JP5743311B2 true JP5743311B2 (ja) | 2015-07-01 |
Family
ID=46258227
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010237140A Active JP5743311B2 (ja) | 2010-10-22 | 2010-10-22 | 超音波診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5743311B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6609173B2 (ja) * | 2015-11-27 | 2019-11-20 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置及びその制御プログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4455003B2 (ja) * | 2003-10-14 | 2010-04-21 | 株式会社日立メディコ | 超音波診断装置 |
| JP2010119630A (ja) * | 2008-11-20 | 2010-06-03 | Ge Medical Systems Global Technology Co Llc | 超音波診断装置 |
| JP5389497B2 (ja) * | 2009-03-30 | 2014-01-15 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置およびその制御プログラム |
| WO2012029458A1 (ja) * | 2010-08-31 | 2012-03-08 | 株式会社 日立メディコ | 3次元弾性画像生成方法及び超音波診断装置 |
-
2010
- 2010-10-22 JP JP2010237140A patent/JP5743311B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012085945A (ja) | 2012-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5484826B2 (ja) | 超音波診断装置 | |
| CN102131466B (zh) | 超声波诊断装置及超声波图像显示方法 | |
| JP5438012B2 (ja) | 超音波診断装置 | |
| JP5186389B2 (ja) | 超音波診断装置 | |
| KR101666324B1 (ko) | 초음파 진단 장치 | |
| US9402600B2 (en) | 3-dimensional elastic image generation method and ultrasonic diagnostic apparatus | |
| JP6307234B2 (ja) | 超音波診断装置 | |
| KR20110135812A (ko) | 초음파 진단 장치 | |
| WO2011086774A1 (ja) | 超音波診断装置及び超音波画像表示方法 | |
| CN103118600B (zh) | 超声波诊断装置以及超声波图像的显示方法 | |
| JP5489178B2 (ja) | 超音波診断装置 | |
| JP5743311B2 (ja) | 超音波診断装置 | |
| JP4181007B2 (ja) | 超音波診断装置 | |
| JP5606998B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP5951926B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP6258070B2 (ja) | 超音波診断装置 | |
| JP2011101729A (ja) | 超音波診断装置 | |
| JP5485418B2 (ja) | 超音波診断装置 | |
| KR20140036977A (ko) | 초음파 진단 장치 및 그 제어 프로그램 | |
| JP2012192075A (ja) | 超音波診断装置および超音波画像生成方法 | |
| JP5725732B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP5922521B2 (ja) | 超音波診断装置及びその制御プログラム | |
| WO2016189955A1 (ja) | 超音波診断装置及び超音波画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20130926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150413 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5743311 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |