JP5670397B2 - バラ積みされた物品をロボットで取出す装置及び方法 - Google Patents
バラ積みされた物品をロボットで取出す装置及び方法 Download PDFInfo
- Publication number
- JP5670397B2 JP5670397B2 JP2012188485A JP2012188485A JP5670397B2 JP 5670397 B2 JP5670397 B2 JP 5670397B2 JP 2012188485 A JP2012188485 A JP 2012188485A JP 2012188485 A JP2012188485 A JP 2012188485A JP 5670397 B2 JP5670397 B2 JP 5670397B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- posture
- dimensional
- hand
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37567—3-D vision, stereo vision, with two cameras
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39476—Orient hand relative to object
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40053—Pick 3-D object from pile of objects
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Description
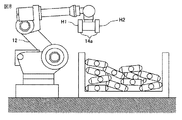
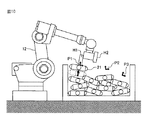
(1)三次元空間にバラ積みされた物品20の表面位置を三次元測定機11で測定して複数の三次元点31の位置情報を取得するようにした。さらに、ロボット制御装置13での処理により、三次元点集合30から互いに近傍にある三次元点31を連結してなる連結集合32を求め(ステップS2)、連結集合32に属する三次元点31の位置情報に基づき、物品20を取出可能なハンド14(保持部14a)の位置姿勢(ハンド位置姿勢34)を求め(ステップS3〜ステップS4)、求められたハンド位置姿勢34にハンド14を移動してコンテナ内から物品21を取出すようにロボット12を制御した(ステップS8〜ステップS10)。
11 三次元測定機
12 ロボット
13 ロボット制御装置
14 ハンド
14a 保持部
16 コンテナ
20 物品
21 保持物品
30 三次元点集合
31 三次元点
32 連結集合
33 代表位置姿勢
34 ハンド位置姿勢
35 座標軸
Claims (8)
- 物品を保持可能なハンドを有するロボットと、
三次元空間にバラ積みされた複数の物品の表面位置を測定し、複数の三次元点の位置情報を取得する三次元測定機と、
前記三次元点測定機によって取得された複数の三次元点の中から、互いに近傍にある三次元点を連結してなる連結集合を求める連結集合演算手段と、
前記連結集合に属する三次元点の位置情報に基づき、前記連結集合を代表する位置及び姿勢である代表位置姿勢を求めて物品の位置及び姿勢を特定する物品特定手段と、
前記物品特定手段により位置及び姿勢が特定された物品を取出し可能な前記ハンドの位置及び姿勢であるハンド位置姿勢であって、前記代表位置姿勢に対応するハンド位置姿勢を求めるハンド位置姿勢演算手段と、
前記ハンド位置姿勢演算手段により求められたハンド位置姿勢へ前記ハンドを移動して前記物品を取出すように前記ロボットを制御するロボット制御手段と、
を備えることを特徴とする物品取出装置。 - 請求項1に記載の物品取出装置において、
前記三次元測定機によって取得された複数の三次元点は三次元点集合を構成し、
前記連結集合演算手段は、所定の座標系に関する、前記三次元点集合に属する第1三次元点と第2三次元点との間の距離が、予め定められた所定距離以内にあるか否かを判定する近傍判定部を有し、該近傍判定部により前記第1三次元点と前記第2三次元点との間の距離が前記所定距離以内にあると判定されると、前記第1三次元点と前記第2三次元点とを連結することを特徴とする物品取出装置。 - 請求項1または2に記載の物品取出装置において、
前記物品特定手段は、前記連結集合に属する三次元点の重心位置と該重心位置における所定の姿勢とを組合せて前記代表位置姿勢を求めることを特徴とする物品取出装置。 - 請求項1または2に記載の物品取出装置において、
前記物品特定手段は、前記連結集合に属する三次元点の位置に基づいて平面を求め、該平面上の1つの点の位置と該平面の法線方向に基づく姿勢とを組合せて前記代表位置姿勢を求めることを特徴とする物品取出装置。 - 請求項1または2に記載の物品取出装置において、
前記物品特定手段は、前記連結集合に属する三次元点の位置に基づいて曲面を求め、該曲面上の1つの点の位置と該位置における該曲面の法線方向に基づく姿勢とを組合せて前記代表位置姿勢を求めることを特徴とする物品取出装置。 - 請求項1または2に記載の物品取出装置において、
前記物品特定手段は、前記連結集合に属する三次元点の位置に基づいて、所定面積以上の三次元点が存在しない閉じた領域が穴であると仮定して穴を求めるとともに、該穴の位置及び姿勢を求め、これら穴の位置及び姿勢を組合せて前記代表位置姿勢を求めることを特徴とする物品取出装置。 - 請求項1〜6のいずれか1項に記載の物品取出装置において、
前記ハンドが、吸引ノズル又は電磁石又は吸着パッド又はチャックのいずれかを有することを特徴とする物品取出装置。 - 物品を保持可能なハンドを有するロボットを用いて、三次元空間にバラ積みされた物品を取出す物品取出方法であって、
前記バラ積みされた複数の物品の表面位置を三次元測定機で測定して複数の三次元点の位置情報を取得し、
前記三次元点測定機によって取得された複数の三次元点の中から、互いに近傍にある三次元点を連結してなる連結集合を求め、
前記連結集合に属する三次元点の位置情報に基づき、前記連結集合を代表する位置及び姿勢である代表位置姿勢を求めて物品の位置及び姿勢を特定し、
前記位置及び姿勢が特定された物品を取出し可能な前記ハンドの位置及び姿勢であるハンド位置姿勢であって、前記代表位置姿勢に対応する前記ハンド位置姿勢を求め、
前記ハンド位置姿勢へ前記ハンドを移動して前記物品を取出すように前記ロボットを制御する、ことを特徴とする物品取出方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012188485A JP5670397B2 (ja) | 2012-08-29 | 2012-08-29 | バラ積みされた物品をロボットで取出す装置及び方法 |
| DE102013109220.9A DE102013109220B4 (de) | 2012-08-29 | 2013-08-26 | Robotervorrichtung und Verfahren zum Herausnehmen von Bulk-Ware aus einem Lager |
| US14/012,748 US9346166B2 (en) | 2012-08-29 | 2013-08-28 | Apparatus and method of taking out bulk stored articles by robot |
| CN201310385097.8A CN103659838B (zh) | 2012-08-29 | 2013-08-29 | 用机器人取出散装物品的装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012188485A JP5670397B2 (ja) | 2012-08-29 | 2012-08-29 | バラ積みされた物品をロボットで取出す装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014046371A JP2014046371A (ja) | 2014-03-17 |
| JP5670397B2 true JP5670397B2 (ja) | 2015-02-18 |
Family
ID=50098564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012188485A Active JP5670397B2 (ja) | 2012-08-29 | 2012-08-29 | バラ積みされた物品をロボットで取出す装置及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9346166B2 (ja) |
| JP (1) | JP5670397B2 (ja) |
| CN (1) | CN103659838B (ja) |
| DE (1) | DE102013109220B4 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016009030A1 (de) | 2015-07-31 | 2017-02-02 | Fanuc Corporation | Vorrichtung für maschinelles Lernen, Robotersystem und maschinelles Lernsystem zum Lernen eines Werkstückaufnahmevorgangs |
| JP2017030135A (ja) * | 2015-07-31 | 2017-02-09 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
| US10807235B2 (en) | 2015-07-31 | 2020-10-20 | Fanuc Corporation | Machine learning device, robot controller, robot system, and machine learning method for learning action pattern of human |
| KR102220304B1 (ko) * | 2020-02-28 | 2021-02-25 | 주식회사 두산 | 로봇 제어 장치 및 로봇 제어 방법 |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101634463B1 (ko) * | 2011-06-29 | 2016-06-28 | 미쓰비시덴키 가부시키가이샤 | 부품 공급 장치 |
| FR3020303B1 (fr) * | 2014-04-25 | 2016-07-15 | Sileane | Procede et installation de prehension automatique d'un objet. |
| JP5778311B1 (ja) * | 2014-05-08 | 2015-09-16 | 東芝機械株式会社 | ピッキング装置およびピッキング方法 |
| US9597801B2 (en) * | 2014-10-21 | 2017-03-21 | Centurylink Intellectual Property Llc | Automated data center |
| CA2996698C (en) | 2015-08-26 | 2021-07-13 | Berkshire Grey, Inc. | Systems and methods for providing contact detection in an articulated arm |
| ES2935283T3 (es) | 2015-09-01 | 2023-03-03 | Berkshire Grey Operating Company Inc | Sistemas y métodos para proporcionar sistemas de control robótico dinámico |
| US11370128B2 (en) | 2015-09-01 | 2022-06-28 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing dynamic robotic control systems |
| ES2976182T3 (es) | 2015-09-09 | 2024-07-26 | Berkshire Grey Operating Company Inc | Sistema y método para proporcionar una iluminación comunicativa dinámica en un entorno robótico |
| EP4235539A3 (en) | 2015-09-11 | 2023-09-27 | Berkshire Grey Operating Company, Inc. | Robotic systems and methods for identifying and processing a variety of objects |
| WO2017083574A1 (en) | 2015-11-13 | 2017-05-18 | Berkshire Grey Inc. | Sortation systems and methods for providing sortation of a variety of obejcts |
| JP6626124B2 (ja) * | 2015-12-01 | 2019-12-25 | 株式会社Fuji | ワーク移載装置及びワーク移載システム |
| US12350713B2 (en) | 2015-12-18 | 2025-07-08 | Berkshire Grey Operating Company, Inc. | Perception systems and methods for identifying and processing a variety of objects |
| US9937532B2 (en) | 2015-12-18 | 2018-04-10 | Berkshire Grey Inc. | Perception systems and methods for identifying and processing a variety of objects |
| ES2922990T3 (es) | 2016-01-08 | 2022-09-22 | Berkshire Grey Operating Company Inc | Sistemas de adquisición y movimiento de objetos |
| CN108778636B (zh) | 2016-02-08 | 2021-11-19 | 伯克希尔格雷股份有限公司 | 用于提供使用运动规划的各种物体的处理的系统和方法 |
| JP6333871B2 (ja) * | 2016-02-25 | 2018-05-30 | ファナック株式会社 | 入力画像から検出した対象物を表示する画像処理装置 |
| ES2964823T3 (es) | 2016-11-28 | 2024-04-09 | Berkshire Grey Operating Company Inc | Sistema de singulación de objetos para su procesamiento |
| CA3139267C (en) | 2016-12-09 | 2023-07-25 | Berkshire Grey, Inc. | Systems and methods for processing objects provided in vehicles |
| JP6450788B2 (ja) | 2017-02-21 | 2019-01-09 | ファナック株式会社 | ワーク取出システム |
| CN115319788A (zh) | 2017-03-06 | 2022-11-11 | 伯克希尔格雷运营股份有限公司 | 用于有效地移动各种物体的系统和方法 |
| CA3178148A1 (en) | 2017-04-24 | 2018-11-01 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing singulation of objects for processing using object movement redistribution |
| ES2973662T3 (es) | 2017-08-02 | 2024-06-21 | Berkshire Grey Operating Company Inc | Sistemas y procedimientos de adquisición y desplazamiento de objetos con superficies exteriores complejas |
| JP6937200B2 (ja) * | 2017-09-12 | 2021-09-22 | 株式会社東芝 | 物品移動装置、物品移動方法、および物品移動制御プログラム |
| JP6695843B2 (ja) | 2017-09-25 | 2020-05-20 | ファナック株式会社 | 装置、及びロボットシステム |
| GB201719058D0 (en) | 2017-11-17 | 2018-01-03 | Ocado Innovation Ltd | Control device and method for a robot system |
| US10792809B2 (en) * | 2017-12-12 | 2020-10-06 | X Development Llc | Robot grip detection using non-contact sensors |
| JP6879238B2 (ja) * | 2018-03-13 | 2021-06-02 | オムロン株式会社 | ワークピッキング装置及びワークピッキング方法 |
| JP7117126B2 (ja) * | 2018-04-02 | 2022-08-12 | Kyoto Robotics株式会社 | ピッキング装置及びその方法 |
| JP6725587B2 (ja) | 2018-05-18 | 2020-07-22 | ファナック株式会社 | バラ積みされたワークを取り出すロボットシステムおよびロボットシステムの制御方法 |
| CN109465812A (zh) * | 2018-11-26 | 2019-03-15 | 广东工业大学 | 一种磁性物体和非磁性物体分堆机械臂以及控制方法 |
| JP7328017B2 (ja) * | 2019-06-11 | 2023-08-16 | ファナック株式会社 | ロボットシステム及び制御装置 |
| CN114502337B (zh) * | 2019-12-13 | 2024-01-09 | 川崎重工业株式会社 | 机器人系统以及工件的三维模型的形成方法 |
| CN116133805A (zh) | 2020-07-22 | 2023-05-16 | 伯克希尔格雷营业股份有限公司 | 用于使用通过护罩反转提供对象保持的真空夹持器进行对象处理的系统和方法 |
| EP4185445A1 (en) | 2020-07-22 | 2023-05-31 | Berkshire Grey Operating Company, Inc. | Systems and methods for object processing using a passively folding vacuum gripper |
| JP2022186063A (ja) * | 2021-06-04 | 2022-12-15 | 日本電気株式会社 | ロボットハンド制御装置、ピッキングシステム、ロボットハンド制御方法およびロボットハンド制御プログラム |
| CA3234674A1 (en) | 2021-10-06 | 2023-04-13 | Berkshire Grey Operating Company, Inc. | Dynamic processing of objects provided in elevated vehicles with evacuation systems and methods for receiving objects |
| US12447605B2 (en) | 2022-01-21 | 2025-10-21 | Berkshire Grey Operating Company, Inc. | Systems and methods for object processing with programmable motion devices using yawing grippers |
| US20250262700A1 (en) * | 2022-04-06 | 2025-08-21 | Freelance Robotics Pty Ltd | 3d modelling and robotic tool system and method |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4017721A (en) * | 1974-05-16 | 1977-04-12 | The Bendix Corporation | Method and apparatus for determining the position of a body |
| US4985846A (en) | 1989-05-11 | 1991-01-15 | Fallon Patrick J | Acoustical/optical bin picking system |
| JP3919932B2 (ja) * | 1998-04-22 | 2007-05-30 | オークラ輸送機株式会社 | 袋状ワーク姿勢検出装置 |
| US6721444B1 (en) * | 1999-03-19 | 2004-04-13 | Matsushita Electric Works, Ltd. | 3-dimensional object recognition method and bin-picking system using the method |
| US6857174B2 (en) * | 2002-01-15 | 2005-02-22 | Denso Corporation | Robot hand for high load work |
| JP3842233B2 (ja) | 2003-03-25 | 2006-11-08 | ファナック株式会社 | 画像処理装置及びロボットシステム |
| CN1730248A (zh) | 2005-08-20 | 2006-02-08 | 大连海事大学 | 一种逆向工程机器人系统 |
| FR2896441B1 (fr) | 2006-01-23 | 2009-07-03 | Jerome Grosbois | Procede et systeme permettant la prehension automatisee de piece(s) |
| ITTO20080450A1 (it) * | 2008-06-11 | 2009-12-12 | Opm S P A | Metodo e gruppo di rilevamento e di comando per la presa di prodotti |
| DE102009009569B4 (de) | 2009-02-19 | 2019-12-19 | Daimler Ag | Verfahren zum Ermitteln einer Teilfläche eines Bauteils |
| JP5257335B2 (ja) * | 2009-11-24 | 2013-08-07 | オムロン株式会社 | 3次元視覚センサにおける計測有効領域の表示方法および3次元視覚センサ |
| JP2011167815A (ja) * | 2010-02-19 | 2011-09-01 | Ihi Corp | 物体認識ロボットシステム |
| JP5480667B2 (ja) | 2010-02-26 | 2014-04-23 | キヤノン株式会社 | 位置姿勢計測装置、位置姿勢計測方法、プログラム |
| FI20105732A0 (fi) * | 2010-06-24 | 2010-06-24 | Zenrobotics Oy | Menetelmä fyysisten kappaleiden valitsemiseksi robottijärjestelmässä |
-
2012
- 2012-08-29 JP JP2012188485A patent/JP5670397B2/ja active Active
-
2013
- 2013-08-26 DE DE102013109220.9A patent/DE102013109220B4/de active Active
- 2013-08-28 US US14/012,748 patent/US9346166B2/en active Active
- 2013-08-29 CN CN201310385097.8A patent/CN103659838B/zh active Active
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016009030A1 (de) | 2015-07-31 | 2017-02-02 | Fanuc Corporation | Vorrichtung für maschinelles Lernen, Robotersystem und maschinelles Lernsystem zum Lernen eines Werkstückaufnahmevorgangs |
| JP2017030135A (ja) * | 2015-07-31 | 2017-02-09 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
| JP2017064910A (ja) * | 2015-07-31 | 2017-04-06 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
| DE102016009030B4 (de) | 2015-07-31 | 2019-05-09 | Fanuc Corporation | Vorrichtung für maschinelles Lernen, Robotersystem und maschinelles Lernsystem zum Lernen eines Werkstückaufnahmevorgangs |
| US10717196B2 (en) | 2015-07-31 | 2020-07-21 | Fanuc Corporation | Machine learning device, robot system, and machine learning method for learning workpiece picking operation |
| US10807235B2 (en) | 2015-07-31 | 2020-10-20 | Fanuc Corporation | Machine learning device, robot controller, robot system, and machine learning method for learning action pattern of human |
| DE102016015873B3 (de) * | 2015-07-31 | 2020-10-29 | Fanuc Corporation | Vorrichtung für maschinelles Lernen, Robotersystem und maschinelles Lernsystem zum Lernen eines Werkstückaufnahmevorgangs |
| US11780095B2 (en) | 2015-07-31 | 2023-10-10 | Fanuc Corporation | Machine learning device, robot system, and machine learning method for learning object picking operation |
| US11904469B2 (en) | 2015-07-31 | 2024-02-20 | Fanuc Corporation | Machine learning device, robot controller, robot system, and machine learning method for learning action pattern of human |
| DE102016015936B4 (de) | 2015-07-31 | 2024-08-29 | Fanuc Corporation | Vorrichtung für maschinelles Lernen, Robotersystem und maschinelles Lernsysem zum Lernen eines Werkstückaufnahmevorgangs |
| DE102016015936B8 (de) | 2015-07-31 | 2024-10-24 | Fanuc Corporation | Vorrichtung für maschinelles Lernen, Robotersystem und maschinelles Lernsystem zum Lernen eines Werkstückaufnahmevorgangs |
| KR102220304B1 (ko) * | 2020-02-28 | 2021-02-25 | 주식회사 두산 | 로봇 제어 장치 및 로봇 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103659838B (zh) | 2016-08-10 |
| US20140067127A1 (en) | 2014-03-06 |
| DE102013109220A1 (de) | 2014-03-06 |
| CN103659838A (zh) | 2014-03-26 |
| JP2014046371A (ja) | 2014-03-17 |
| US9346166B2 (en) | 2016-05-24 |
| DE102013109220B4 (de) | 2019-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5670397B2 (ja) | バラ積みされた物品をロボットで取出す装置及び方法 | |
| JP5642738B2 (ja) | バラ積みされた物品をロボットで取出す装置及び方法 | |
| JP5788461B2 (ja) | バラ積みされた物品をロボットで取出す装置及び方法 | |
| JP5897532B2 (ja) | 三次元空間に置かれた物品をロボットで取出す装置及び方法 | |
| US12205188B2 (en) | Multicamera image processing | |
| JP2015089590A (ja) | バラ積みされた物品をロボットで取出す装置及び方法 | |
| JP5788460B2 (ja) | バラ積みされた物品をロボットで取出す装置及び方法 | |
| CN111683798B (zh) | 工件拾取装置以及工件拾取方法 | |
| US20220180552A1 (en) | Device, method, and program for detecting position and orientation of target object | |
| US11823414B2 (en) | Information processing device, information processing method, and information processing non-transitory computer readable medium | |
| CN111483750A (zh) | 机器人系统的控制方法以及控制装置 | |
| JP2023085917A (ja) | 画像処理装置、ロボット制御システムおよび制御方法 | |
| CN111470244B (zh) | 机器人系统的控制方法以及控制装置 | |
| JP7757756B2 (ja) | 画像処理装置、ロボット制御システムおよび制御方法 | |
| WO2024120172A1 (zh) | 目标物定位方法、装置、设备和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20140124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140605 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20140604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140610 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5670397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |