JP5638190B2 - 超音波診断装置 - Google Patents
超音波診断装置 Download PDFInfo
- Publication number
- JP5638190B2 JP5638190B2 JP2008275194A JP2008275194A JP5638190B2 JP 5638190 B2 JP5638190 B2 JP 5638190B2 JP 2008275194 A JP2008275194 A JP 2008275194A JP 2008275194 A JP2008275194 A JP 2008275194A JP 5638190 B2 JP5638190 B2 JP 5638190B2
- Authority
- JP
- Japan
- Prior art keywords
- elasticity
- physical quantity
- weighting coefficient
- frame data
- image frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Description
(第一実施形態)
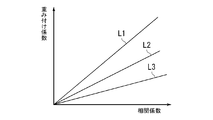
先ず、第一実施形態について説明する。図1は、本発明に係る超音波診断装置の第一実施形態の構成を示すブロック図、図2は、図1に示す超音波診断装置におけるカラー弾性画像処理部の構成を示すブロック図、図3は、重み付け係数設定直線を示す図である。
次に、第二実施形態について説明する。図4は、第二実施形態における超音波診断装置のカラー弾性画像処理部の構成を示すブロック図である。以下、第一実施形態との相違点のみ説明する。
k1=WAV1/(WAV1+WAV2+WAV3+WAV4) ・・・(数式1)
k2=WAV2/(WAV1+WAV2+WAV3+WAV4) ・・・(数式2)
k3=WAV3/(WAV1+WAV2+WAV3+WAV4) ・・・(数式3)
k4=WAV4/(WAV1+WAV2+WAV3+WAV4) ・・・(数式4)
k1n=W1n/(W1n+W2n+W3n+W4n) ・・・(数式1′)
k2n=W2n/(W1n+W2n+W3n+W4n) ・・・(数式2′)
k3n=W3n/(W1n+W2n+W3n+W4n) ・・・(数式3′)
k4n=W4n/(W1n+W2n+W3n+W4n) ・・・(数式4′)
k1=E1/(E1+E2+E3+E4) ・・・(数式5)
k2=E2/(E1+E2+E3+E4) ・・・(数式6)
k3=E3/(E1+E2+E3+E4) ・・・(数式7)
k4=E4/(E1+E2+E3+E4) ・・・(数式8)
k1n=N1n/(N1n+N2n+N3n+N4n) ・・・(数式5′)
k2n=N2n/(N1n+N2n+N3n+N4n) ・・・(数式6′)
k3n=N3n/(N1n+N2n+N3n+N4n) ・・・(数式7′)
k4n=N4n/(N1n+N2n+N3n+N4n) ・・・(数式8′)
8 表示部
61 変位算出部(物理量算出手段)
62 弾性画像フレームデータ作成部
63 表示弾性画像作成部
65 重み付け係数設定部
Claims (7)
- 被検体の生体組織の弾性を画像化した弾性画像を表示する表示手段と、
被検体に超音波を送信して得られたエコー信号に基づいて、生体組織における各部の弾性に関する物理量を算出する物理量算出手段と、
該物理量算出手段によって算出された生体組織における各部の弾性に関する物理量に基づいて、弾性画像フレームデータを作成する弾性画像フレームデータ作成手段と、
同一音線上における時間的に異なる2つのエコー信号について、相関ウィンドウ毎に相関処理を行って算出された相関係数を、エコー信号の信頼度として用いて重み付け係数を設定する重み付け係数設定手段と、
前記重み付け係数が乗算された時間的に異なる複数の弾性画像フレームデータを加算処理して前記表示手段に表示される弾性画像を作成する表示弾性画像作成手段と、
を備えることを特徴とする超音波診断装置。 - 被検体の生体組織の弾性を画像化した弾性画像を表示する表示手段と、
被検体に超音波を送信して得られたエコー信号に基づいて、生体組織における各部の弾性に関する物理量を算出する物理量算出手段と、
該物理量算出手段によって算出された生体組織における各部の弾性に関する物理量に基づいて、弾性画像フレームデータを作成する弾性画像フレームデータ作成手段と、
前記物理量算出手段によって算出された生体組織における各部の弾性に関する物理量の一フレーム分の統計分布と前記各部の弾性に関する物理量とを比較して、該各部の弾性に関する物理量がエラーか否かを判定して決定される該各部の弾性に関する物理量の評価結果を、エコー信号の信頼度として用いて重み付け係数を設定する重み付け係数設定手段と、
前記重み付け係数が乗算された時間的に異なる複数の弾性画像フレームデータを加算処理して前記表示手段に表示される弾性画像を作成する表示弾性画像作成手段と、
を備えることを特徴とする超音波診断装置。 - 被検体の生体組織の弾性を画像化した弾性画像を表示する表示手段と、
被検体に超音波を送信して得られたエコー信号に基づいて、生体組織における各部の弾性に関する物理量を算出する物理量算出手段と、
該物理量算出手段によって算出された生体組織における各部の弾性に関する物理量に基づいて、弾性画像フレームデータを作成する弾性画像フレームデータ作成手段と、
エコー信号の振幅がゼロである部分をエラーとし、ゼロではない部分を非エラーとする評価結果を、エコー信号の信頼度として用いて重み付け係数を設定する重み付け係数設定手段と、
前記重み付け係数が乗算された時間的に異なる複数の弾性画像フレームデータを加算処理して前記表示手段に表示される弾性画像を作成する表示弾性画像作成手段と、
を備えることを特徴とする超音波診断装置。 - 重み付け係数は、フレーム単位で設定されることを特徴とする請求項1〜3のいずれか一項に記載の超音波診断装置。
- 重み付け係数は、弾性画像フレームデータの画素単位で設定されることを特徴とする請求項1〜3に記載の超音波診断装置。
- 前記物理量算出手段は、同一音線上における時間的に異なる2つのエコー信号について、相関ウィンドウ毎に相関処理を行って、生体組織における各部の弾性に関する物理量の算出を行うことを特徴とする請求項1〜5のいずれか一項に記載の超音波診断装置。
- 生体組織の弾性に関する物理量は、生体組織の変位、歪み又は弾性率のいずれかであることを特徴とする請求項1〜6のいずれか一項に記載の超音波診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008275194A JP5638190B2 (ja) | 2008-10-27 | 2008-10-27 | 超音波診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008275194A JP5638190B2 (ja) | 2008-10-27 | 2008-10-27 | 超音波診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010099378A JP2010099378A (ja) | 2010-05-06 |
| JP5638190B2 true JP5638190B2 (ja) | 2014-12-10 |
Family
ID=42290551
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008275194A Active JP5638190B2 (ja) | 2008-10-27 | 2008-10-27 | 超音波診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5638190B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5535574B2 (ja) * | 2009-10-23 | 2014-07-02 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| JP4999969B2 (ja) * | 2010-07-13 | 2012-08-15 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置及びその制御プログラム |
| KR101390185B1 (ko) | 2010-08-23 | 2014-04-29 | 삼성메디슨 주식회사 | 탄성영상을 제공하는 초음파 시스템 및 방법 |
| US9289191B2 (en) | 2011-10-12 | 2016-03-22 | Seno Medical Instruments, Inc. | System and method for acquiring optoacoustic data and producing parametric maps thereof |
| JP5951926B2 (ja) * | 2010-11-29 | 2016-07-13 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置及びその制御プログラム |
| US9730587B2 (en) | 2011-11-02 | 2017-08-15 | Seno Medical Instruments, Inc. | Diagnostic simulator |
| US11287309B2 (en) | 2011-11-02 | 2022-03-29 | Seno Medical Instruments, Inc. | Optoacoustic component utilization tracking |
| US9743839B2 (en) | 2011-11-02 | 2017-08-29 | Seno Medical Instruments, Inc. | Playback mode in an optoacoustic imaging system |
| KR102105728B1 (ko) * | 2012-03-09 | 2020-04-28 | 세노 메디컬 인스투르먼츠 인코포레이티드 | 광음향 이미징 시스템에서의 통계적 매핑 |
| JP6139242B2 (ja) * | 2013-04-22 | 2017-05-31 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置及びその制御プログラム |
| JP6724414B2 (ja) * | 2016-02-26 | 2020-07-15 | コニカミノルタ株式会社 | 超音波診断装置、超音波診断装置の制御方法及びプログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1075955A (ja) * | 1996-07-11 | 1998-03-24 | Fujitsu Ltd | 超音波診断装置 |
| WO2005122906A1 (ja) * | 2004-06-18 | 2005-12-29 | Hitachi Medical Corporation | 超音波診断装置 |
| WO2008010500A1 (fr) * | 2006-07-18 | 2008-01-24 | Hitachi Medical Corporation | Dispositif de diagnostic à ultrasons |
| JP4998982B2 (ja) * | 2006-08-07 | 2012-08-15 | 株式会社タイホーコーザイ | 石灰泥の脱水促進剤 |
| JP4843432B2 (ja) * | 2006-09-20 | 2011-12-21 | 日立アロカメディカル株式会社 | 超音波診断装置 |
| JP5280379B2 (ja) * | 2008-02-18 | 2013-09-04 | 株式会社日立メディコ | 超音波診断装置、超音波弾性情報処理方法及び超音波弾性情報処理プログラム |
-
2008
- 2008-10-27 JP JP2008275194A patent/JP5638190B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010099378A (ja) | 2010-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5638190B2 (ja) | 超音波診断装置 | |
| US8684931B2 (en) | Ultrasonic diagnostic apparatus for elasticity imaging | |
| JP5260602B2 (ja) | 超音波診断装置 | |
| JP4999969B2 (ja) | 超音波診断装置及びその制御プログラム | |
| KR100740379B1 (ko) | 초음파 화상 디스플레이 방법 및 초음파 진단 장치 | |
| US11071525B2 (en) | Ultrasonic diagnostic apparatus and method | |
| JP2010119630A (ja) | 超音波診断装置 | |
| JP5356140B2 (ja) | 超音波診断装置及びその制御プログラム | |
| US8870777B2 (en) | Ultrasound diagnostic apparatus | |
| JP5489178B2 (ja) | 超音波診断装置 | |
| JP2012061075A (ja) | 超音波診断装置及びその制御プログラム | |
| JP5229889B2 (ja) | 超音波診断装置 | |
| JP5484809B2 (ja) | 超音波診断装置 | |
| JP2011101729A (ja) | 超音波診断装置 | |
| JP5606998B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP6801337B2 (ja) | 超音波診断装置 | |
| JP5394693B2 (ja) | 超音波診断装置 | |
| KR20140036977A (ko) | 초음파 진단 장치 및 그 제어 프로그램 | |
| JP5485418B2 (ja) | 超音波診断装置 | |
| JP7477947B2 (ja) | 超音波画像生成装置およびその制御方法 | |
| JP5879230B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP4785936B2 (ja) | 超音波画像表示方法および超音波診断装置 | |
| KR101574821B1 (ko) | 초음파 진단 장치 및 그 제어 프로그램 | |
| JP5626986B2 (ja) | 超音波診断装置及びその制御プログラム | |
| JP5449896B2 (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20110518 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130415 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130712 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130718 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131216 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140317 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140320 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140922 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141022 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5638190 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |