JP5594086B2 - 変位検出装置 - Google Patents
変位検出装置 Download PDFInfo
- Publication number
- JP5594086B2 JP5594086B2 JP2010259115A JP2010259115A JP5594086B2 JP 5594086 B2 JP5594086 B2 JP 5594086B2 JP 2010259115 A JP2010259115 A JP 2010259115A JP 2010259115 A JP2010259115 A JP 2010259115A JP 5594086 B2 JP5594086 B2 JP 5594086B2
- Authority
- JP
- Japan
- Prior art keywords
- displacement
- magnetic field
- displacement detection
- detection
- magnet material
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Description
また、前記複数の変位検出素子の出力値のうちの最大値の選択を、前記複数のダイオードからなる極めて簡易な電気回路の構成で行うことができる。
また、前記複数の変位検出素子の出力値のうちの最大値の選択に際し、前記ダイオードにおいて生じた電圧降下分を前記補償回路で補償することができ、より高精度に前記被変位検出体の変位を検出することができる。
磁石材料13が3つの磁場方向検知型素子12の並設方向に移動したとする。このとき、全ての検出範囲A1〜A3における磁石材料13の変位に応じて、3つの磁場方向検知型素子121〜123のいずれかの出力電圧V1〜V3が、最大値選択回路14において最大値VMとして選択・出力される。この最大値VM(より正確にはこれに相関する出力信号)に基づいて、磁石材料13の変位が検出される。
(1)本実施形態では、磁石材料13の変位に一対一で対応するように設定された複数の磁場方向検知型素子12の出力電圧Vのうちの最大値VMを最大値選択回路14により選択することで、該選択された最大値VMに基づいて磁石材料13の変位を検出することができる。この場合、磁石材料13がその移動方向に短小であったとしても、該移動方向に複数の磁場方向検知型素子12が並設されることで、磁石材料13の変位の検出範囲を十分に確保することができる。また、磁石材料13が短小であれば、その移動方向に要するスペースは概ね複数の磁場方向検知型素子12の当該方向のスペースに収まるため、装置全体としての搭載性を向上することができる。さらに、複数の磁場方向検知型素子12の出力電圧Vのうちの最大値VMを選択し得る極めて簡易且つ安価な電気回路の構成で、磁石材料13の変位を検出することができる。
(6)本実施形態では、磁石材料13の外部磁場が一定レベルよりも小さくなるとき(即ち磁石材料13が該当の磁場方向検知型素子12の検出範囲A外にあるとき)、磁場方向検知型素子12から零となる出力電圧Vを出力する。従って、外部磁場が小さくなって磁場方向検知型素子12の検知精度が低下したり検知不能になったりした場合に、磁石材料13の変位が検出されることがないため、変位検出装置10全体の動作を安定化し、結果として高精度を確保することができる。
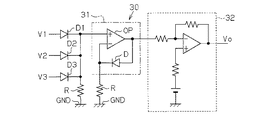
・図7に示す回路構成の最大値選択回路30であってもよい。すなわち、この最大値選択回路30において、前記オペアンプOPは、出力端子がダイオードD1〜D3と同等の特性を有するダイオードDのアノードに電気的に接続され、反転入力端子がダイオードDのカソードに電気的に接続されている。また、ダイオードD1〜D3のカソード及びダイオードDのカソードは、それぞれ抵抗Rを介してグランドGNDに接地されている。オペアンプOP及びダイオードDは、補償回路31を構成する。このような回路構成を採用することで、ダイオードD1〜D3における電圧降下分Vth(≒0.6〜0.7V)を補償することができる。
V1−Vth=Vo−Vth
∴V1=Vo
となって、ダイオードD1〜D3における電圧降下分Vthを補償した出力電圧V1が出力電圧VoとしてオペアンプOP(最大値選択回路30)から出力される。
V1−Vth=(Vo−n・Vth)・(R1/(R1+R2))
∴(R1+R2)V1−(R1+R2)Vth=R1・Vo−n・R1・Vth
R1・Vo=(R1+R2)V1+(n・R1−(R1+R2))Vth
Vo=((R1+R2)/R1)V1+(n−(R1+R2)/R1)Vth
∴n−(R1+R2)/R1=0であれば、
Vo=((R1+R2)/R1)V1
となる。つまり、n=(R1+R2)/R1となるようにn,R1,R2を選択・設定することで、((R1+R2)/R1)V1が出力電圧VoとしてオペアンプOP(最大値選択回路33)から出力される。従って、この回路構成においても、ダイオードD1〜D3における電圧降下分Vthを補償しつつ増幅等した出力電圧Voを出力することができる。
・前記実施形態において、変位検出素子として、1個のホール素子を採用してもよい。
Claims (5)
- 被変位検出体と、該被変位検出体の移動方向に並設された複数の変位検出素子とを備える変位検出装置において、
前記被変位検出体の移動に伴う前記複数の変位検出素子の出力値のうちの最大値が前記被変位検出体の変位に一対一で対応するように設定してなり、
前記複数の変位検出素子の出力値のうちの最大値を選択する選択手段を備え、
前記選択手段は、前記複数の変位検出素子の出力端子に一の電極がそれぞれ接続され、他の電極同士が短絡された複数のダイオードで構成され、
前記複数のダイオードの短絡された前記他の電極にはオペアンプの非反転入力端子が接続され、該オペアンプの反転入力端子には、グランドに接地された抵抗が接続されるとともに該オペアンプの出力端子が接続されており、
前記選択手段は、前記ダイオードにおける電圧降下分を補償する補償回路を備え、該補償回路は、前記オペアンプと、該オペアンプの前記出力端子から前記反転入力端子に帰還させる帰還経路に接続されたダイオードとを有することを特徴とする変位検出装置。 - 請求項1に記載の変位検出装置において、
前記被変位検出体は、磁石材料であって、
前記変位検出素子は、磁場方向検知型素子からなることを特徴とする変位検出装置。 - 請求項2に記載の変位検出装置において、
前記変位検出素子の磁場を検出する検出面は、前記被変位検出体の移動方向に直交する一方向で該被変位検出体の表面と平行に対向するように配置されていることを特徴とする変位検出装置。 - 請求項1〜3のいずれか一項に記載の変位検出装置において、
前記帰還経路に接続されたダイオードは、直列接続された複数のダイオードからなることを特徴とする変位検出装置。 - 請求項4に記載の変位検出装置において、
前記帰還経路には、前記直列接続された複数のダイオードと前記反転入力端子との間に第2抵抗が接続されており、
前記補償回路は、前記直列接続された複数のダイオードと、前記グランドに接地された抵抗である第1抵抗と、前記第2抵抗とを有することを特徴とする変位検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010259115A JP5594086B2 (ja) | 2010-11-19 | 2010-11-19 | 変位検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010259115A JP5594086B2 (ja) | 2010-11-19 | 2010-11-19 | 変位検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012112655A JP2012112655A (ja) | 2012-06-14 |
| JP5594086B2 true JP5594086B2 (ja) | 2014-09-24 |
Family
ID=46497054
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010259115A Expired - Fee Related JP5594086B2 (ja) | 2010-11-19 | 2010-11-19 | 変位検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5594086B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012203225A1 (de) * | 2012-03-01 | 2013-09-05 | Tyco Electronics Amp Gmbh | Verfahren zum berührungslosen messen einer relativen position mittels eines 3d-hallsensors mit messsignalspeicher |
| JP6430265B2 (ja) * | 2015-01-20 | 2018-11-28 | メレキシス テクノロジーズ エス エー | 変位検出装置 |
| JP6030199B1 (ja) * | 2015-08-28 | 2016-11-24 | 栄通信工業株式会社 | 直線摺動ポテンショメータ |
| JP6566885B2 (ja) * | 2016-02-10 | 2019-08-28 | メレキシス テクノロジーズ エス エー | 回転検出装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11215039A (ja) * | 1998-01-27 | 1999-08-06 | Matsushita Electric Ind Co Ltd | アンテナダイバーシティ受信機 |
| JP4378814B2 (ja) * | 1999-07-16 | 2009-12-09 | 株式会社日本自動車部品総合研究所 | 回転角検出装置 |
| EP1243897B1 (de) * | 2001-03-23 | 2013-12-18 | Melexis Technologies NV | Magnetischer Weggeber |
-
2010
- 2010-11-19 JP JP2010259115A patent/JP5594086B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012112655A (ja) | 2012-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7355382B2 (en) | Current sensor and mounting method thereof | |
| US9279866B2 (en) | Magnetic sensor | |
| EP3262430B1 (en) | Magnetic field sensor | |
| US9719805B2 (en) | Position detecting device | |
| US11397225B2 (en) | Current sensor, magnetic sensor and circuit | |
| US11199593B2 (en) | Magnetic sensor | |
| JP5594086B2 (ja) | 変位検出装置 | |
| US20160041209A1 (en) | Sensor element with temperature compensating function, and magnetic sensor and electric power measuring device which use same | |
| JP2016223894A (ja) | 磁気センサ | |
| US9664753B2 (en) | Hall-effect-based magnetic field sensor having an improved output bandwidth | |
| JP5373580B2 (ja) | 位置検出装置 | |
| US20200191882A1 (en) | Displacement detector device | |
| US11009569B2 (en) | Magnetic field sensing device | |
| JP2019174140A (ja) | 磁気センサ | |
| JP7119633B2 (ja) | 磁気センサ | |
| JP2013167562A (ja) | 磁気検出装置 | |
| US11553132B2 (en) | Method of correcting position detecting signal and position detecting device | |
| WO2017077871A1 (ja) | 磁気センサ | |
| JP2016142652A (ja) | 電力センサー | |
| JP7119695B2 (ja) | 磁気センサ | |
| US20240044944A1 (en) | Current detection apparatus and current detection method | |
| JP2019219293A (ja) | 磁気センサ | |
| US20240044945A1 (en) | Magnetic sensor, current detection apparatus and current detection method | |
| US6861717B2 (en) | Device for defecting a magnetic field, magnetic field measure and current meter | |
| WO2015146640A1 (ja) | 電流センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140408 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140708 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140721 |
|
| LAPS | Cancellation because of no payment of annual fees |