JP5476776B2 - Trolley wire inspection device - Google Patents
Trolley wire inspection device Download PDFInfo
- Publication number
- JP5476776B2 JP5476776B2 JP2009094530A JP2009094530A JP5476776B2 JP 5476776 B2 JP5476776 B2 JP 5476776B2 JP 2009094530 A JP2009094530 A JP 2009094530A JP 2009094530 A JP2009094530 A JP 2009094530A JP 5476776 B2 JP5476776 B2 JP 5476776B2
- Authority
- JP
- Japan
- Prior art keywords
- range sensor
- coordinates
- trolley
- range
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
Description
本発明は、測域センサを用いてトロリ線の高さ、変位を測定するトロリ線検測装置に関し、特に、測定時の誤差を低減し、精度の高い測定値を得ることができるトロリ線検測装置に関する。 The present invention relates to a trolley wire inspection device that measures the height and displacement of a trolley wire using a range sensor, and in particular, a trolley wire detector that can reduce measurement errors and obtain highly accurate measurement values. It relates to a measuring device.
電気車に電気を供給するための電線であるトロリ線は、レールからの高さや電力供給を受けるパンタグラフ上での偏位の範囲が決められていることから、その高さや偏位が所定範囲内に収まるようにトロリ線を保全する必要がある。これには、トロリ線の高さや偏位の測定が重要となる。 The trolley wire, which is an electric wire for supplying electricity to the electric vehicle, has a predetermined height within the specified range because the height from the rail and the range of displacement on the pantograph that receives power supply are determined. It is necessary to maintain the trolley wire so that it fits in the area. For this purpose, measurement of the height and displacement of the trolley wire is important.
従来、トロリ線を測定する方法としては例えば以下のようなものがある。第一に、パンタグラフのバネの部分にLEDなどの光源を二個ずつ上下に設置し、パンタグラフからの相対位置を求める方法である(例えば、特許文献1参照)。第二に、パンタグラフのバネの位置に光を反射しやすいマーカを取り付けてラインセンサで撮影し、パターンマッチングにより相対位置を検出する方法である(例えば、特許文献2参照)。第三に、トロリ線にロータリエンコーダを取り付けたポリゴンミラーを介してレーザ光を当て、ポリゴンミラーからトロリ線までの距離と、ロータリエンコーダから読み取れる回転角度をもとに、ポリゴンミラーからの相対位置を求める方法である(例えば、特許文献3参照)。 Conventional methods for measuring trolley wires include the following. First, there is a method in which two light sources such as LEDs are installed one above the other on the spring portion of the pantograph, and the relative position from the pantograph is obtained (see, for example, Patent Document 1). Second, there is a method in which a marker that easily reflects light is attached to the position of the spring of the pantograph, the line sensor is used for photographing, and the relative position is detected by pattern matching (see, for example, Patent Document 2). Third, irradiate the trolley wire with a laser beam through a polygon mirror with a rotary encoder, and determine the relative position from the polygon mirror based on the distance from the polygon mirror to the trolley wire and the rotation angle that can be read from the rotary encoder. This is a method of obtaining (see, for example, Patent Document 3).
また、上述した第一ないし第三の方法のほかに、測域センサを用いてトロリ線の高さと偏位を求めることもできる。即ち、図12に示すように、車両1の屋根上に車両1の進行方向に平行な軸周りでトロリ線4をスキャンするように測域センサ2を設置する一方、車両1の内部に演算装置3を設置する。そして、測域センサ2においてレーザ光によりセンサの周囲を扇状にスキャンして得た測定対象物までの距離とステップ角とに基づき演算装置3において演算処理を行い、トロリ線の高さ及び偏位を求める。
In addition to the first to third methods described above, the trolley line height and deflection can be obtained using a range sensor. That is, as shown in FIG. 12, while the
つまり、測域センサ2の正面を鉛直上方に向けて車両1に配置し、その車両1を走行させることで測域センサ2の設置場所からトロリ線4までの距離と角度を取得し、これらを演算装置3側で座標に変換することで、測域センサ2からトロリ線4までの高さと偏位を求めるのである。
That is, the distance and the angle from the place where the
しかしながら、上記特許文献1に記載された構成では接触力を測定するために二箇所にLEDやマーカを取り付ける必要がある。さらにパンタグラフの高さ・偏位・接触力が同時に得られるような計算を行っているため、高さと偏位のみを得たい場合には不要な計算が発生してしまうという問題があった。また、特許文献2に記載された構成では、まず時空画像を生成してからパターンマッチングを行うため、リアルタイムに高さや偏位を得ることが困難であるという問題があった。
However, in the configuration described in
一方、文献3や測域センサを用いた方法では直接的にトロリ線までの距離と角度が得られるため、最小限の計算でトロリ線までの高さや偏位が得られるという利点がある。しかし、図12に示したように測域センサ4を用いてトロリ線4の高さを測定する際、第一にトロリ線4の形状による誤差が生じるという問題、第二に測域センサ2の精度による誤差が生じるという問題の二つの問題が生じるおそれがあった。
On the other hand, since the distance and angle to the trolley line can be obtained directly by the method using the
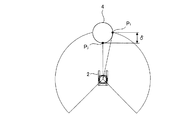
上記第一の問題は、図13に示すように、測域センサ2は一定の微小な角度ごとに放射線状に周囲をスキャンように構成されているため、測域センサ2からの距離が近いトロリ線4Aを測定する場合と、測域センサ2からの距離が遠いトロリ線4Bを測定する場合とでは、測域センサ2からの距離が遠いトロリ線4Bを測定する場合の方が測定誤差が大きくなる可能性が高いという問題である。これは、トロリ線4A,4Bの大きさが同じ場合であっても測域センサ2からの距離によって測域センサ2による一回のスキャンでトロリ線4A,4Bを検出できる回数が異なる場合があるためである。
As shown in FIG. 13, the first problem is that the
即ち、測域センサ2によるトロリ線4の高さ測定では、一回のスキャンで得られるトロリ線4A,4Bの座標のうちその位置が最も低い座標をトロリ線4の座標とする。ところが、トロリ線4A,4Bの検出箇所Piが中心からずれると、図14に示すようにずれた分だけ最下点Pjとの誤差が大きくなる。この誤差を低減するには、角度分解能の高い測域センサを用いる必要があった。
That is, in the measurement of the height of the
また、第二の問題は、測域センサ2そのものの精度によるものであり、この場合にも、より測定精度の高い測域センサを用いる必要があった。
The second problem is due to the accuracy of the
このようなことから本発明は、測域センサによる測定誤差を低減することを可能としたトロリ線検測装置を提供することを目的とする。 In view of the above, an object of the present invention is to provide a trolley line inspection device that can reduce measurement errors caused by a range sensor.
上記の課題を解決する第1の発明に係るトロリ線検測装置は、車両の屋根上に設置される測域センサと、前記車両の内部に設置される演算装置とを備え、前記測域センサの検出結果に基づいて前記演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、前記演算装置が、前記測域センサの操作を行う制御手段と、前記測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、前記検出範囲抽出手段において、前記検出範囲内にある測定対象物のみを抽出して求めた前記座標から、トロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角φを有するようにその設置角度を設定され、該傾斜角φをrmax・sinω<a/cosφ(ただし、rmaxは前記測域センサから前記トロリ線までの距離の最大値、ωは前記測域センサの角度分解能、aは前記トロリ線の半径)とし、前記測域センサから前記トロリ線までの距離rが前記測域センサの測定可能距離を超えないものとすることを特徴とする。 A trolley wire inspection device according to a first invention for solving the above-mentioned problems includes a range sensor installed on a roof of a vehicle, and an arithmetic unit installed inside the vehicle, wherein the range sensor A trolley wire inspection device that determines the height and displacement of the trolley wire based on the detection result of the trolley wire , wherein the arithmetic device operates the range sensor; and the range sensor after converting the position of the measurement object measured in the orthogonal coordinates by a detecting range extraction means for obtaining the coordinates by extracting only the measurement object within the detection range set in advance, in the detection range extraction unit, wherein from obtained by extracting only the measurement object within a detection range the coordinates, comprising a trolley wire coordinate detecting means for detecting a trolley line candidate coordinates, and a log output means for outputting a trolley line coordinates in a specific format, The installation range sensor is set such that the scan plane has an inclination angle φ around an axis parallel to the vertical direction with respect to a plane orthogonal to the traveling direction of the vehicle, and the inclination angle φ is set to rmax. Sinω <a / cosφ (where rmax is the maximum value of the distance from the range sensor to the trolley line, ω is the angular resolution of the range sensor, and a is the radius of the trolley line), and the range sensor The distance r from the trolley line does not exceed the measurable distance of the range sensor .
上記の課題を解決する第2の発明に係るトロリ線検測装置は、車両の屋根上に設置される測域センサと、前記車両の内部に設置される演算装置とを備え、前記測域センサの検出結果に基づいて前記演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、前記演算装置が、前記測域センサの操作を行う制御手段と、前記測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、前記測域センサによる一回のスキャンにおいて検出される複数の前記測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して前記車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたことを特徴とする。 A trolley wire inspection device according to a second invention for solving the above-mentioned problems comprises a range sensor installed on the roof of a vehicle, and an arithmetic unit installed inside the vehicle, wherein the range sensor A trolley wire inspection device that determines the height and displacement of the trolley wire based on the detection result of the trolley wire, wherein the arithmetic device operates the range sensor; and the range sensor After converting the position of the measurement object measured by the orthogonal coordinates, the detection range extraction means for extracting only the measurement object within the preset detection range and obtaining the coordinates, and one time by the range sensor comprising a trolley wire coordinate detecting means for detecting a trolley line candidate coordinates from coordinates of a plurality of the measurement object to be detected in a scan, and a log output means for outputting a trolley line coordinates in a particular format, the measurement zone Sen But wherein the the scan plane is set the installation angle to have a tilt angle with an axis parallel to the width direction of the vehicle with respect to a plane perpendicular to the traveling direction of the vehicle.
上記の課題を解決する第3の発明に係るトロリ線検測装置は、車両の屋根上に設置される測域センサと、前記車両の内部に設置される演算装置とを備え、前記測域センサの検出結果に基づいて前記演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、前記演算装置が、前記測域センサの操作を行う制御手段と、前記測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、前記測域センサによる一回のスキャンにおいて検出される複数の前記測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角を有するとともに、前記車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたことを特徴とする。 A trolley wire inspection device according to a third invention for solving the above-mentioned problems comprises a range sensor installed on the roof of a vehicle, and an arithmetic unit installed inside the vehicle, wherein the range sensor A trolley wire inspection device that determines the height and displacement of the trolley wire based on the detection result of the trolley wire, wherein the arithmetic device operates the range sensor; and the range sensor After converting the position of the measurement object measured by the orthogonal coordinates, the detection range extraction means for extracting only the measurement object within the preset detection range and obtaining the coordinates, and one time by the range sensor comprising a trolley wire coordinate detecting means for detecting a trolley line candidate coordinates from coordinates of a plurality of the measurement object to be detected in a scan, and a log output means for outputting a trolley line coordinates in a particular format, the measurement zone Sen However, the scan plane has an inclination angle about an axis parallel to the vertical direction with respect to a plane orthogonal to the traveling direction of the vehicle, and has an inclination angle about an axis parallel to the width direction of the vehicle. The installation angle is set.
上述した第1の発明に係るトロリ線検測装置によれば、車両の屋根上に設置される測域センサと、車両の内部に設置される演算装置とを備え、測域センサの検出結果に基づいて演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、演算装置が、測域センサの操作を行う制御手段と、測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、検出範囲抽出手段において、検出範囲内にある測定対象物のみを抽出して求めた座標から、トロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、測域センサが、そのスキャン平面が車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角φを有するようにその設置角度を設定され、該傾斜角φをrmax・sinω<a/cosφ(ただし、rmaxは測域センサからトロリ線までの距離の最大値、ωは測域センサの角度分解能、aはトロリ線の半径)とし、測域センサからトロリ線までの距離rが測域センサの測定可能距離を超えないものとするので、測域センサによる測定誤差を低減することができる。また、トロリ線を測定する領域を広くすることができるため、測域センサの角度分解能を変更することなく、一回のスキャンで一つのトロリ線を測定する回数を増加させることができ、測定値の精度が向上する。さらに、測域センサの測定可能距離内で確実にトロリ線の測定を行うことができる。 According to the trolley line inspection device according to the first invention described above, the range sensor installed on the roof of the vehicle and the arithmetic unit installed inside the vehicle are provided, and the detection result of the range sensor is displayed. a trolley wire detector device for determining the height and deflection of the trolley wire by the arithmetic unit on the basis the position of the arithmetic unit, and a control means for operating the range sensor, the measurement object measured by range sensor after converting into Cartesian coordinates, the detecting range extraction means for obtaining the coordinates by extracting only the measurement object within the detection range set in advance, the detection range extraction unit, only the measurement object within the detection range A trolley line coordinate detecting means for detecting trolley line candidate coordinates from the extracted coordinates, and a log output means for outputting the trolley line coordinates in a specific format . Progression The installation angle is set to have an inclination angle φ around an axis parallel to the vertical direction with respect to a plane orthogonal to the direction, and the inclination angle φ is set to rmax · sinω <a / cosφ (where rmax is a range sensor The maximum distance from the trolley line to the trolley line, ω is the angular resolution of the range sensor, a is the radius of the trolley line), and the distance r from the range sensor to the trolley line does not exceed the measurable distance of the range sensor since the, it is possible to reduce a measurement error due to range sensor. In addition, since the area for measuring the trolley line can be widened, the number of times one trolley line can be measured in one scan can be increased without changing the angular resolution of the range sensor. Improves accuracy. Furthermore, the trolley wire can be reliably measured within the measurable distance of the range sensor.
第2の発明に係るトロリ線検測装置によれば、車両の屋根上に設置される測域センサと、車両の内部に設置される演算装置とを備え、測域センサの検出結果に基づいて演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、演算装置が、測域センサの操作を行う制御手段と、測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、測域センサによる一回のスキャンにおいて検出される複数の測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、測域センサが、そのスキャン平面が車両の進行方向に直交する面に対して車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたので、より角度分解能の高い測域センサを導入することなく、測域センサによる高さ方向の誤差を低減することができる。 According to the trolley wire inspection apparatus according to the second aspect of the present invention, the trolley line inspection apparatus includes a range sensor installed on the roof of the vehicle and an arithmetic unit installed inside the vehicle, based on the detection result of the range sensor. A trolley wire inspection device that determines the height and displacement of a trolley wire by an arithmetic device, wherein the arithmetic device orthogonally intersects the control means for operating the range sensor and the position of the measurement object measured by the range sensor. After converting into coordinates, only a measurement object within a preset detection range is extracted, and detection range extraction means for obtaining the coordinates, and a plurality of measurement objects detected in one scan by the range sensor comprising a trolley wire coordinate detecting means for detecting a trolley line candidate coordinates from the coordinates, and a log output means for outputting a trolley line coordinates in a particular format, range sensor is the scan plane orthogonal to the traveling direction of the vehicle surface On the other hand, since the installation angle is set so that it has an inclination angle around an axis parallel to the width direction of the vehicle, an error in the height direction by the range sensor can be achieved without introducing a range sensor with higher angular resolution. Can be reduced.
第3の発明に係るトロリ線検測装置によれば、車両の屋根上に設置される測域センサと、車両の内部に設置される演算装置とを備え、測域センサの検出結果に基づいて演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、演算装置が、測域センサの操作を行う制御手段と、測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、測域センサによる一回のスキャンにおいて検出される複数の測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、測域センサが、そのスキャン平面が車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角を有するとともに、車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたので、測域センサの高さ方向の誤差を低減しつつ、トロリ線の測域センサによって測定される領域を広げることができる。 According to the trolley line inspection device according to the third aspect of the present invention, the trolley wire inspection device includes a range sensor installed on the roof of the vehicle and an arithmetic unit installed inside the vehicle, and is based on the detection result of the range sensor. A trolley wire inspection device that determines the height and displacement of a trolley wire by an arithmetic device, wherein the arithmetic device orthogonally intersects the control means for operating the range sensor and the position of the measurement object measured by the range sensor. After converting into coordinates, only a measurement object within a preset detection range is extracted, and detection range extraction means for obtaining the coordinates, and a plurality of measurement objects detected in one scan by the range sensor comprising a trolley wire coordinate detecting means for detecting a trolley line candidate coordinates from the coordinates, and a log output means for outputting a trolley line coordinates in a particular format, range sensor is the scan plane orthogonal to the traveling direction of the vehicle surface On the other hand, the installation angle is set to have an inclination angle around an axis parallel to the vertical direction and an inclination angle around an axis parallel to the width direction of the vehicle. The area measured by the range sensor of the trolley line can be expanded while reducing.
以下、図面を参照しつつ本発明に係るトロリ線検測装置の詳細を説明する。 Hereinafter, the details of the trolley wire inspection apparatus according to the present invention will be described with reference to the drawings.
図1乃至図14を用いて本発明に係るトロリ線検測装置の第一の実施例を説明する。
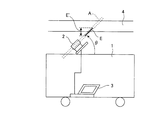
図1に示すように、本実施例に係るトロリ線検測装置は、車両1の屋根上にトロリ線4を測定可能に設置された測域センサ2と、車両1の内部に設置された演算装置3とを備えて構成されている。
A first embodiment of the trolley wire inspection apparatus according to the present invention will be described with reference to FIGS.
As shown in FIG. 1, the trolley wire inspection device according to the present embodiment includes a
測域センサ2はレーザ光により測定領域Aとしてその周囲を扇状にスキャンし、トロリ線4等の測定対象物までの距離とステップ角を演算装置3に出力するものであり、本実施例においては、図2に示すようにその正面を鉛直上方に向けるとともに、そのスキャン平面S(測域センサ2によってスキャンされる面)が車両1の進行方向に直交する面に対して鉛直方向に平行な軸回りで角度φ(0°<φ<90°)だけ傾斜するようにその設置角度を設定されている。また、本実施例では、測域センサ2は図1に示す測定範囲A(スキャン角度270°)を1080ステップでスキャンするものとし、これにより角度分解能ωは0.25°となっている。なお、図1中の符合Bは後述する検出範囲を示しており、図1(b)及び図2においてはトロリ線4の直径を誇張して示している。また、図1(b)において斜線を付した部分はトロリ線4と測定範囲Aとが交差する面の例を示している。
The
本実施例では、上述したように測域センサ2をそのスキャン平面Sが車両1の進行方向に直交する面に対して斜めになるように配置することにより、トロリ線4に対するスキャン幅d’が、測域センサ2のスキャン平面Sを車両1の進行方向に直交させた場合のスキャン幅dに比較して広くなっている。そのため、相対的に角度分解能を向上させることが可能となり、測定対象物の形状による誤差を解消することができる。
In the present embodiment, as described above, the
ここで、トロリ線4はその断面がほぼ円形である一方、パンタグラフに接する箇所、即ち測域センサ2によって位置を検出される面は平らになっているため、一つのトロリ線4に対して常に1スキャンで2回以上その位置の測定を行うことができれば十分な精度が得られると考えられる。
Here, the
図1及び図2に示すように測域センサ2を車両1の進行方向に直交する面に対して角度φだけ傾斜させて設置した場合のスキャン幅d’[mm]は、従来のスキャン幅d[mm]を用いて下式(1)のように表される。
As shown in FIGS. 1 and 2, the scan width d ′ [mm] when the

以下に、一例として角度分解能ωの測域センサ2を用いて直径2aのトロリ線4を検測する場合を考える。測域センサ2による測定対象物の位置測定は、図13に示し上述したように測域センサ2と測定対象物との間の距離に大きく影響される。
As an example, consider the case where the
例えば、測域センサ2をそのスキャン平面Sが車両1の正面に対して平行するように設置した場合、一回のスキャンで常に2回以上トロリ線を検出するための条件式は、測域センサ2からこの測域センサ2によって測定されるトロリ線4の位置までの距離(以下、単に「測域センサ2からトロリ線4までの距離」という)r[mm]を用いて下式(2)のように表せる。
For example, when the
![]()
![]()
例えば、測域センサ2の角度分解能をω=0.25°、トロリ線4の直径を2a=12.37mmとした場合、(2)式から、測域センサ2からトロリ線4までの距離rは約r<1417.5mmとなる。これに対し、トロリ線4は表1に示すようにレールから決まった高さと偏位に存在しなければならないことが定められている。
For example, when the angular resolution of the
表1に示すように、新幹線に使われるトロリ線4の場合は、レール面から最高5300mmの高さに敷設される。ここで、一例として新幹線の車高を3360mmとすると、車両1の上部からトロリ線4までの高さは最高1940mmとなる。つまり、新幹線にこの測域センサ2を載せてトロリ線4を検測する場合には、1スキャンにつき1回しか検出できない箇所があることが分かる。
As shown in Table 1, in the case of the
これに対し、本実施例に係るトロリ線検測装置を適用する場合は、測域センサ2からトロリ線4までの距離の最大値をrmax[mm]とした場合に下式(3)を満たすようなφが存在すればその有効性が確認される。
On the other hand, when the trolley wire inspection device according to the present embodiment is applied, the following equation (3) is satisfied when the maximum value of the distance from the
一例として、測域センサ2の角度分解能をω=0.25°、トロリ線4の直径を2a=12.37、測域センサ2からトロリ線4までの距離の上限をrmax=1940mmとして上式を解くと、cosφ<0.7306…、即ちφ>43.05…となる。従って、車両1の進行方向に直交する面に対して測域センサ2を例えば設置角度φ=45°で配置すれば、一回のスキャンで常に2回以上トロリ線4を測定することができることがわかる。このように、本実施例によれば測域センサ2による測定誤差を低減し、測定精度を向上させることが可能となる。
As an example, the angular resolution of the
なお、本実施例では、車両1の正面に対する測域センサ2の設置角度φを90°に近づけるほどトロリ線4に対するスキャン範囲を広く採ることができる。しかし設置角度φを90°に近づけると、図5に示すように、測域センサ2からトロリ線4までの距離r[mm]が大きくなってしまう。これに対し、測域センサ2は測定可能範囲が決まっており、測域センサ2からトロリ線4までの距離rが測域センサ2の測定可能距離Rを越えないようにする必要がある。
In the present embodiment, the scanning range for the
例えば、測域センサ2の角度分解能がω=0.25°、測定可能距離がR=4095mm、トロリ線4の偏位の限界がwmax=300/cosφ[mm]、車両1の上部からトロリ線4までの高さがh=1940mmである場合、測域センサ2の設置角度φは下式(4)の条件を満たす必要がある。
For example, the angular resolution of the
(4)式から、測域センサ2の設置角度の範囲はφ<85.228となる。このように、測域センサ2の角度分解能ω、トロリ線4の偏位の上限wmax、車両1の上部からトロリ線4までの高さの上限hmaxに応じて測域センサ2の設置角度φを調整するようにすればよい。
From the equation (4), the range of the installation angle of the
このように構成される測域センサ2に対し、演算装置3は測域センサ2による測定結果に基づいてトロリ線4の高さや偏位等を算出する部分である。この演算装置3には、図3に示すように制御部31、第一メモリ32、検出範囲抽出部33、第二メモリ34、トロリ線座標検出部35、第三メモリ36、ログ出力部37が設けられている。
In contrast to the
制御部31は測域センサ2の操作を行い、測域センサ2によって検出された測定対象物の距離・角度データは第一メモリ32に格納される。検出範囲抽出部33は、第一メモリ32から取り出した距離・角度データに基づき、予め設定した検出範囲B内に存在する測定対象物の座標を対象物座標として抽出する。検出範囲Bは、測定範囲A内に、トロリ線4の高さ方向及び水平方向の偏位に基づいて設定される。
The
より詳しくは、まず、測域センサ2から送られてきた距離・角度データの余弦xφ[mm]・正弦yφ[mm]を取り、測域センサ2にとっての直交座標に変換する。続いて、更にx=xφcosφ[mm]、y=yφ[mm]により、測域センサ2によって取得した測定結果を実際の直交座標に変換する。その後、この座標が検出範囲B内に存在するか否かを判断し、検出範囲B内に存在する測定対象物の座標を対象物座標として出力する。検出範囲抽出部33から出力された対象物座標は第二メモリ34に格納される。
More specifically, first, the cosine x φ [mm] / sine y φ [mm] of the distance / angle data sent from the
トロリ線座標検出部35は、第二メモリ34から取り出した一回のスキャンで連続して得られる複数の対象物座標のうち、最もその位置が低い座標をトロリ線4の座標とみなし、これをトロリ線座標として出力する。なお、一回のスキャンで連続して測定対象物を検出した後に、間隔をおいて検出範囲B内で再度測定対象物を検出した際には、二度目に検出された測定対象物を新たなトロリ線とみなし、第二のトロリ線の座標として出力する。トロリ線座標検出部35から出力されたトロリ線座標は第三メモリ36に格納される。
The trolley line coordinate detection unit 35 regards the coordinate having the lowest position as the coordinates of the
ログ出力部37は、第三メモリ36から取り出したトロリ線座標を履歴データとして特定のフォーマットで出力する。そしてこのログ出力部37から出力された履歴データをログLとして保管する。
The
図4に示すように、本実施例に係るトロリ線検測装置によりトロリ線の測定を行う場合、演算装置3では、まず、制御部31により測域センサ2を操作してトロリ線4の測定を開始し、測域センサ2によって求めた測定範囲A内にある測定対象物までの距離及び角度のデータを取得する(ステップP1)。続いて、検出範囲抽出部33、トロリ線座標検出部35によりトロリ線4の判定を行い(ステップP2)、ログ出力部37により履歴データを出力する(ステップP3)。上記ステップP1からステップP3の工程を測定終了まで繰り返す(ステップP4)。
As shown in FIG. 4, when measuring the trolley wire by the trolley wire inspection device according to the present embodiment, the
このように構成される本実施例に係るトロリ線検測装置によれば、従来に比べてトロリ線4を測定する際のスキャン範囲を広く採ることができるため、一回のスキャンでトロリ線4を検出可能な回数が増加する。従ってより精度の高い測定値を得ることができる。また、測定結果の精度向上のために、より角度分解能の高い測域センサを導入する必要がなくなる。
According to the trolley wire inspection apparatus according to the present embodiment configured as described above, the
図6及び図7を用いて本発明に係るトロリ線検測装置の第2の実施例を説明する。本実施例は図1乃至図14に示し上述した実施例1に係るトロリ線検測装置とは測域センサ2の設置角度が異なるものである。その他の構成は実施例1に係るトロリ線検測装置と概ね同様であり、以下、同一の作用を奏する部材には同一の符合を付して重複する説明は省略し、異なる点を中心に説明する。
A second embodiment of the trolley wire inspection apparatus according to the present invention will be described with reference to FIGS. This embodiment is different from the trolley wire inspection apparatus according to the first embodiment shown in FIGS. 1 to 14 in that the installation angle of the
図6に示すように、本実施例において測域センサ2はそのスキャン平面Sが水平面に対して車両1の幅方向に平行な軸周りで角度θ(0<θ<90°)だけ傾斜した状態となるように、換言すると、車両1の進行方向に直交する面に対して車両1の幅方向に平行な軸回りで角度(90°−θ)だけ傾斜した状態となるように設置されている。
As shown in FIG. 6, in this embodiment, the
ここで、測域センサ2のセンサ固有誤差E[mm]は、常に測域センサ2のスキャン平面Sの方向に発生する。従って、測域センサ2を水平面に対して角度θだけ傾けたとき、高さ方向の誤差E’[mm]は下式(5)で表される。
E’=Esinθ ・・・(5)
Here, the sensor inherent error E [mm] of the
E ′ = Esinθ (5)
例えば測域センサ2のセンサ固有誤差をE=±30mm、測域センサ2の設置角度をθ=45°とすると、(5)式から高さ方向の誤差E’は下式(6)に示す値となる。
E’=Esin45°=±21.21… ・・・(6)
For example, when the sensor specific error of the
E ′ = Esin45 ° = ± 21.21 (6)
即ち、本実施例では、測域センサ2の設置角度θを小さくすればするほど誤差を低減することができる。ただし、設置角度θを小さくすると図7に示すように測域センサ2からトロリ線4までの距離r[mm]が大きくなる。このため、設置角度θは車両1の上部からトロリ線4までの高さをh、測定可能距離をR、トロリ線4の偏位をwとすると、下式(7)を満たす必要がある。
That is, in this embodiment, the error can be reduced as the installation angle θ of the
例えば測域センサ2の測定可能距離をR=4095mm、車両の屋根からトロリ線4までの高さの限界をh=1940mm、トロリ線4の偏位をw=0mmとすると、測域センサ2の設置角度θは(7)式より、θ>28.27…となる。
For example, if the measurable distance of the
本実施例に係るトロリ線検測装置によるトロリ線4の検出手順を以下に示す。本実施例において、検出範囲抽出部33では、第一メモリ32から取り出した測定対象物の距離・角度データに対して、これの余弦xθ[mm]・正弦yθ[mm]を取り、測域センサ2にとっての直交座標に変換する。更にx=xθ[mm]、y=yθsinθ[mm]により、実際の直交座標に変換する。その後、x,yが検出範囲Bに入っていれば対象物座標、即ち、トロリ線の座標候補として第二メモリ34に格納する。
The procedure for detecting the
このように構成される本実施例に係るトロリ線検測装置によれば、測域センサ2の高さ方向の誤差を低減することができる。また、測定精度向上のためにより精度の高い測域センサ2を導入する必要がなくなる。
According to the trolley wire inspection apparatus according to the present embodiment configured as described above, errors in the height direction of the
図8乃至図11を用いて本実施例に係るトロリ線検測装置の第3の実施例を説明する。
図8に示すように、本実施例は上述した実施例1及び実施例2の構成を組み合わせたものである。即ち、本実施例において測域センサ2は、そのスキャン平面Sが車両1の進行方向に直交する面に対して鉛直方向に平行な軸周りに角度φだけ傾斜しているとともに、水平面に対して車両1の幅方向に平行な軸周りに角度θだけ傾斜するようにその設置角度を設定されている。
A third embodiment of the trolley wire inspection apparatus according to this embodiment will be described with reference to FIGS.
As shown in FIG. 8, the present embodiment is a combination of the configurations of the first and second embodiments described above. In other words, in the present embodiment, the
以下に、測域センサ2の水平面に対する傾きθの範囲の数値例を示す。
Below, the numerical example of the range of inclination (theta) with respect to the horizontal surface of the
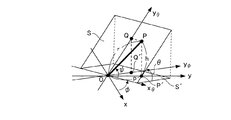
図9乃至図11に示すように測定対象物(トロリ線4)の検出点Pをスキャン平面のyθ軸に正射影した点をQ、点Pと点Qを水平面S’に正射影した点をP’,Q’とする。ここで、測域センサ2から測定対象物(トロリ線4)までの距離OPをr[mm]、平面S’から検出点Pまでの距離PP’=QQ’をh[mm]、OP’をp[mm]とすると、測域センサ2から測定対象物(トロリ線4)までの距離rは下式(8)で表される。
r2=p2+h2 ・・・(8)
As shown in FIGS. 9 to 11, Q is a point obtained by orthogonally projecting the detection point P of the measurement object (trolley line 4) onto the yθ axis of the scan plane, and a point obtained by orthogonally projecting the points P and Q onto the horizontal plane S ′. Let P ′, Q ′. Here, the distance OP from the
r 2 = p 2 + h 2 (8)
図11からh=pcosφtanθであるから、これを(8)式に代入して測域センサ2から測定対象物(トロリ線4)までの距離rは下式(9)で表される。
Since h = p cos φ tan θ from FIG. 11, the distance r from the
ここで、測域センサ2から測定対象物(トロリ線4)までの距離rは、実施例1で示した(2)式から下式(10)の関係を満たす必要がある。
Here, the distance r from the
以上をcosφについて整理すると、下式(11)が得られる。 By arranging the above for cos φ, the following equation (11) is obtained.
ここで、cos2φ≧0であるから、上記不等式の右辺は0より大きくなる。従って、例えば測域センサ2からトロリ線4までの高さをh=1940mm、測域センサ2の角度分解能をω=0.25°、トロリ線4の直径を2a=12.37、トロリ線4の偏位をw=0とすると、tanθ>1.3686…、即ちθ>53.3885°が得られる。
Here, since cos 2 φ ≧ 0, the right side of the inequality is greater than zero. Therefore, for example, the height from the
また、測域センサ2の傾斜角φの範囲は、上記(11)式から下式(12)で与えられる(ただし、θ>53.3885°)。
The range of the inclination angle φ of the
測域センサ2からトロリ線4までの距離rは、トロリ線4が最大偏位の位置にあるとき(例えば、w=300mm)に最大となる。いま、図10の平面Sを角度φだけ傾斜した座標系における座標(x,y)は、図9のパラメータを用いて下式(13)のように表される。
The distance r from the
更に図9乃至図11から下式(14)が得られる。
rsinψsinθ=h ・・・(14)
Further, the following formula (14) is obtained from FIGS.
rsinψsinθ = h (14)
これらをx=300mm、h=1940mmとして整理すると測域センサ2からトロリ線4までの距離r[mm]は下式(15)で表される。
When these are arranged as x = 300 mm and h = 1940 mm, the distance r [mm] from the
上記(13)式においてrが測域センサの測定可能距離Rを越えないように、例えばr<1940mmを満たすようにパラメータθ,φの範囲を求めると、最小のθとそれに対応するφはそれぞれθ=59°、φ=66°となる。 When the ranges of the parameters θ and φ are determined so that r does not exceed the measurable distance R of the range sensor in the above equation (13), for example, r <1940 mm, the minimum θ and the corresponding φ are respectively θ = 59 ° and φ = 66 °.
このように構成される本実施例に係るトロリ線検測装置において、検出範囲抽出部33では、まず、測域センサ2から送られてきた距離r、角度ψのデータから余弦xθ・正弦yθを取り、測域センサ2にとっての直交座標に変換する。次にxφ=xθ、yφ=yθcosθにより、スキャン平面Sを設置角度θだけ傾斜させた直交座標に変換する。更に、x=xφcosφ−yφsinφ、y=rsinψsinθにより、実際の直交座標に変換する。その後、x,yが検出範囲Bに入っていれば対象物座標、即ち、トロリ線4の座標候補として第二メモリ34に格納する。
In the trolley wire inspection apparatus according to the present embodiment configured as described above, the detection
トロリ線4の偏位x[mm]と高さy[mm]は最終的に図9乃至図11に示すパラメータを用いて下式(16)、(17)で表される。
x=rcosψcosφ−rsinψsinφcosθ ・・・(16)
y=rsinψsinθ ・・・(17)
The displacement x [mm] and height y [mm] of the
x = r cos φ cos φ−r sin φ sin φ cos θ (16)
y = rsinψsinθ (17)
本実施例に係るトロリ線検測装置によれば、測域センサの高さ方向の誤差を低減しつつ、測定範囲を広げることができる。また、上述した実施例2に比較して、角度分解能の高い測域センサを導入することなく、測域センサ2からトロリ線4までの距離が離れることによって、一回のスキャンでトロリ線4を検出できる回数が減る可能性を低減することができる。
According to the trolley wire inspection apparatus according to the present embodiment, the measurement range can be expanded while reducing the error in the height direction of the range sensor. Further, as compared with the second embodiment described above, the distance from the
上述した実施例2に係るトロリ線検測装置では、実施例1で述べた測域センサ2からトロリ線4までの距離により十分な測定精度を得られなくなる問題に対し、角度分解能の高い測域センサを用いることが必要となる。これに対し、本実施例に係るトロリ線検測装置は、実施例1と実施例2を組み合わせることにより、測域センサ2を交換することなく測域センサ2固有の誤差の影響を低減し、さらに測定範囲を拡張することを特徴とする。本実施例において、測域センサ2のスキャン平面Sによってスキャンされるトロリ線4の幅については実施例1と同様の議論ができ、測域センサ2の誤差については実施例2と同様の議論ができる。
In the trolley wire inspection device according to the second embodiment described above, the measurement range with high angular resolution is used to solve the problem that sufficient measurement accuracy cannot be obtained due to the distance from the
本発明は、測域センサを用いてトロリ線の高さ・偏位を測定するトロリ線検測装置に適用可能である。 The present invention is applicable to a trolley wire inspection device that measures the height and displacement of a trolley wire using a range sensor.
1 車両
2 測域センサ
3 演算装置
31 制御部
32 第一メモリ
33 検出範囲抽出部
34 第二メモリ
35 トロリ線座標検出部
36 第三メモリ
37 ログ出力部
38 ログ
4 トロリ線
A 測定範囲
B 検出範囲
S スキャン平面
DESCRIPTION OF
Claims (3)
前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角φを有するようにその設置角度を設定され、該傾斜角φを
rmax・sinω<a/cosφ
(ただし、rmaxは前記測域センサから前記トロリ線までの距離の最大値、ωは前記測域センサの角度分解能、aは前記トロリ線の半径)
とし、前記測域センサから前記トロリ線までの距離rが前記測域センサの測定可能距離を超えないものとすることを特徴とするトロリ線検測装置。 A range sensor installed on the roof of the vehicle; and an arithmetic unit installed inside the vehicle, and the arithmetic unit determines the height and displacement of the trolley wire based on the detection result of the range sensor. A trolley wire inspection device to be obtained , wherein the arithmetic unit converts the position of the measurement object measured by the control means for operating the range sensor and the range sensor into orthogonal coordinates, and is set in advance Detection range extraction means for extracting only the measurement object within the detection range and obtaining its coordinates, and in the detection range extraction means, from the coordinates obtained by extracting only the measurement object within the detection range, Trolley line coordinate detection means for detecting trolley line candidate coordinates, and log output means for outputting trolley line coordinates in a specific format ,
The range sensor is set such that its scan plane has an inclination angle φ around an axis parallel to a vertical direction with respect to a plane orthogonal to the traveling direction of the vehicle, and the inclination angle φ is
rmax · sinω <a / cosφ
(Where rmax is the maximum value of the distance from the range sensor to the trolley line, ω is the angular resolution of the range sensor, and a is the radius of the trolley line)
The trolley line inspection device is characterized in that a distance r from the range sensor to the trolley line does not exceed a measurable distance of the range sensor .
前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して前記車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたことを特徴とするトロリ線検測装置。 A range sensor installed on the roof of the vehicle; and an arithmetic unit installed inside the vehicle, and the arithmetic unit determines the height and displacement of the trolley wire based on the detection result of the range sensor. A trolley wire inspection device to be obtained, wherein the arithmetic unit converts the position of the measurement object measured by the control means for operating the range sensor and the range sensor into orthogonal coordinates, and is set in advance Detection range extraction means for extracting only the measurement object within the detection range and obtaining the coordinates thereof, and trolley line candidate coordinates from the coordinates of the plurality of measurement objects detected in one scan by the range sensor Trolley line coordinate detection means for detecting, and log output means for outputting the trolley line coordinates in a specific format,
And wherein the measuring area sensor, the scan plane is set the installation angle to have a tilt angle with an axis parallel to the width direction of the vehicle with respect to a plane perpendicular to the traveling direction of the vehicle Trolley line inspection device .
前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角を有するとともに、前記車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたことを特徴とするトロリ線検測装置。 A range sensor installed on the roof of the vehicle; and an arithmetic unit installed inside the vehicle, and the arithmetic unit determines the height and displacement of the trolley wire based on the detection result of the range sensor. A trolley wire inspection device to be obtained, wherein the arithmetic unit converts the position of the measurement object measured by the control means for operating the range sensor and the range sensor into orthogonal coordinates, and is set in advance Detection range extraction means for extracting only the measurement object within the detection range and obtaining the coordinates thereof, and trolley line candidate coordinates from the coordinates of the plurality of measurement objects detected in one scan by the range sensor Trolley line coordinate detection means for detecting, and log output means for outputting the trolley line coordinates in a specific format,
The range sensor has an inclination angle about an axis parallel to a vertical direction with respect to a plane whose scan plane is orthogonal to the traveling direction of the vehicle, and an inclination angle about an axis parallel to the width direction of the vehicle. A trolley wire inspection device characterized in that the installation angle is set so as to have.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009094530A JP5476776B2 (en) | 2009-04-09 | 2009-04-09 | Trolley wire inspection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009094530A JP5476776B2 (en) | 2009-04-09 | 2009-04-09 | Trolley wire inspection device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010243417A JP2010243417A (en) | 2010-10-28 |
| JP5476776B2 true JP5476776B2 (en) | 2014-04-23 |
Family
ID=43096576
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009094530A Active JP5476776B2 (en) | 2009-04-09 | 2009-04-09 | Trolley wire inspection device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5476776B2 (en) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103307994B (en) * | 2013-06-03 | 2015-11-25 | 上海电器科学研究所(集团)有限公司 | A kind of electric automobile charging pile measuring mechanical property method |
| JP6236688B2 (en) * | 2013-11-11 | 2017-11-29 | 株式会社明電舎 | Overhead inspection system using time series filter processing |
| JP6225362B2 (en) | 2013-11-11 | 2017-11-08 | 株式会社明電舎 | Train self-position estimation device |
| JP2015178979A (en) * | 2014-03-19 | 2015-10-08 | 東海旅客鉄道株式会社 | Position detection device of train line facility |
| CN105333824A (en) * | 2015-10-22 | 2016-02-17 | 中国计量学院 | Side protection device installation size measurement system based on sheet light and measurement method |
| JP6696207B2 (en) * | 2016-02-18 | 2020-05-20 | 株式会社明電舎 | Overhead position measuring device and overhead line position measuring method |
| JP6531051B2 (en) * | 2016-02-29 | 2019-06-12 | 日本電信電話株式会社 | Equipment state detection method and apparatus |
| JP7374835B2 (en) * | 2020-03-30 | 2023-11-07 | 日鉄テックスエンジ株式会社 | Relative position monitoring device for overhead wires and pantographs |
| CN111896044A (en) * | 2020-06-09 | 2020-11-06 | 山东信通电子股份有限公司 | Monitoring method and equipment for railway contact net compensation device |
| CN113063362B (en) * | 2021-04-07 | 2023-05-09 | 湖南凌翔磁浮科技有限责任公司 | Non-contact type magnetic levitation train bogie interval detection method |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3204797B2 (en) * | 1993-04-26 | 2001-09-04 | 日立電子エンジニアリング株式会社 | Calculation method of trolley wire wear using laser reflected light |
| JP3815019B2 (en) * | 1998-01-20 | 2006-08-30 | 株式会社デンソー | Vehicle type identification device |
| JP2001050723A (en) * | 1999-08-11 | 2001-02-23 | Minolta Co Ltd | Distance measuring equipment |
| JP2001051058A (en) * | 1999-08-11 | 2001-02-23 | Minolta Co Ltd | Apparatus for measuring distance |
| JP3699320B2 (en) * | 2000-02-23 | 2005-09-28 | 財団法人鉄道総合技術研究所 | Pantograph displacement, contact force and trolley line deviation measuring device |
| JP4085588B2 (en) * | 2001-03-22 | 2008-05-14 | 株式会社明電舎 | Pantograph measuring device |
| JP2003057342A (en) * | 2001-08-20 | 2003-02-26 | Nikon Corp | Ranging device and ranging method |
| JP2006123787A (en) * | 2004-10-29 | 2006-05-18 | Railway Technical Res Inst | Height/deflection measuring device for trolley cable |
| JP4714104B2 (en) * | 2006-07-31 | 2011-06-29 | 富士重工業株式会社 | Object tilt detection device |
| JP4923942B2 (en) * | 2006-10-20 | 2012-04-25 | 株式会社明電舎 | Pantograph measuring device by image processing |
-
2009
- 2009-04-09 JP JP2009094530A patent/JP5476776B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010243417A (en) | 2010-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5476776B2 (en) | Trolley wire inspection device | |
| JP6069639B2 (en) | Wire measuring device | |
| JP2012521546A (en) | Method for optically scanning and measuring the surrounding space | |
| JP2010044050A (en) | Method of recognizing posture of laser radar and laser radar | |
| JP6669294B1 (en) | Pantograph displacement measuring device and trolley wire hard point detection method | |
| JP5418176B2 (en) | Pantograph height measuring device and calibration method thereof | |
| EP3739359A1 (en) | Laser radar device, laser radar measurement method, laser radar measurement program and vehicle | |
| JP7452682B2 (en) | Inspection system, extraction device, inspection method and program | |
| WO2014024812A1 (en) | Support detection device using laser measurement | |
| KR101576583B1 (en) | Method and Apparatus for Stock Pile Scanning by Position Measurement of Stacker | |
| JP2010169505A (en) | Pantograph height measuring device and method for calibrating the same | |
| JP2015225055A (en) | Trolley wire wear measuring instrument by image processing and method thereof | |
| JP6311757B2 (en) | Insulator detecting device and insulator detecting method | |
| JP2009198382A (en) | Environment map acquiring device | |
| JP6673688B2 (en) | Measurement method and measurement program | |
| RU2593425C2 (en) | Method and apparatus for measuring the centricity of current-carrying conductor in the insulated enclosure | |
| JP2011033428A (en) | Pantograph height measuring device | |
| US10900776B2 (en) | Sensor device for distance offset measurements | |
| JP7166582B2 (en) | Vehicle surrounding recognition sensor inspection system, vehicle surrounding recognition sensor inspection method | |
| TWI644851B (en) | Steel coil center coordinate detecting device and method thereof | |
| JP2021109776A (en) | Target, detection system and detection method | |
| JPH11142124A (en) | Method and equipment for measuring sectional shape of rail | |
| JP6601178B2 (en) | Local map creation device and local map creation method | |
| JPH10185514A (en) | Coil position detector | |
| EP2159534A1 (en) | Eccentricity gauge for wire and cable and method for measuring concentricity |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5476776 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |