JP5345568B2 - 鉄道軌道の曲率・曲線半径測定方法 - Google Patents
鉄道軌道の曲率・曲線半径測定方法 Download PDFInfo
- Publication number
- JP5345568B2 JP5345568B2 JP2010021042A JP2010021042A JP5345568B2 JP 5345568 B2 JP5345568 B2 JP 5345568B2 JP 2010021042 A JP2010021042 A JP 2010021042A JP 2010021042 A JP2010021042 A JP 2010021042A JP 5345568 B2 JP5345568 B2 JP 5345568B2
- Authority
- JP
- Japan
- Prior art keywords
- points
- railway track
- track
- curvature
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
図8はかかる従来の鉄道軌道の曲線形状データ取得装置の模式図である。
この図において、101は鉄道軌道、102は車体、103はセンサ部、104は傾斜はり、105は台車枠、106は車輪軸、107は車体方位角速度センサ、108は速度センサ、109は傾斜角センサ、110は車体左右振動加速度センサ、111は演算・記憶部、112は曲率演算部、113はカント演算部、114は記憶部である。
また、本願発明者らは、検出器ユニットを車両の台車枠に取付けることで、加速度計の傾きの影響を回避し、加速度計、変位計ともに個数を減らし、取付車両を選ばず、軸箱に部品を取り付ける必要のない慣性正矢法軌道狂い検測装置を提案している(下記特許文献2参照)。
曲率(1/m)=台車枠の方位角速度(rad/s)/走行速度(m/s)
で計算するようにしている。
本発明は、上記状況に鑑みて、測定範囲を低速域にまで広げることができる鉄道軌道の曲率・曲線半径測定方法を提供することを目的とする。
〔1〕軌道検測車に角度計をセットし、この角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、この車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、この計算結果にローパスフィルタ処理を施す、鉄道軌道の曲率・曲線半径測定方法において、前記角度計からの情報が傾斜角であり、前記計算式が前記鉄道軌道の2点間の相対角度/前記鉄道軌道の2点間の距離であり、それによって前記鉄道軌道の縦断線形の曲率を求めることを特徴とする。
低速時の測定を安定的に精度良く行うには、速度の項を排した演算式を用い、それに応じた項目を測ればよい。具体的には、平面線形を見る平面曲線なら方位角(ヨー角)、縦断線形を見る縦曲線なら線路長手方向の傾斜角(ピッチ角)を測定することになる。
ここで、平面線形とは平面路線の形状を言う。また、縦断線形とは線路のこう配や縦曲線など、線路長手方向の高低変化の形状を言う。
〔A〕鉄道軌道の平面線形の曲率を求める場合(図2参照)
(1)まず、角度計(ジャイロセンサ、傾斜計、方位センサなど)を用いて、方位角を検出する(ステップS1)。
(3)一方、車輪回転計(ロータリーエンコーダなど)を用いて、距離信号(車輪回転パルスなど)を検出する(ステップS3)。
(4)次に、距離信号に基づいて、鉄道軌道1の2点A,B間の距離d(サンプリング間隔)を計算する(ステップS4)。
(6)上記ステップS5で得られているデータは角度計の分解能に依存した階段状波形なので、ローパスフィルタ処理を施す(ステップS6)。それにより、鉄道軌道1の管理に必要十分な精度の滑らかな曲率が得られる。
〔B〕鉄道軌道の平面線形の曲線半径を求める場合(図3参照)
(1)ステップS11〜S14は、上記した図1のステップS1〜S4と同様である。
(2)次に、鉄道軌道1の2点A,B間の距離d/鉄道軌道1の2点A,Bのそれぞれの接線C,Dの相対角度γを計算して、曲線半径Rを求める(ステップS15)。
である。ここで、鉄道軌道1の2点A,B間の距離dは、軌道検測車が低速なほど小さくなる。
(3)次いで、ローパスフィルタ処理を施す(ステップS36)。それにより、鉄道軌道1の管理に必要十分な精度の滑らかな曲線半径が得られる。
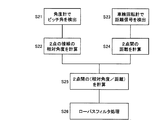
図4は本発明の実施例を示す低速で測定可能な鉄道軌道の縦断線形の曲率・曲線半径を求める方法の模式図、図5は本発明の実施例を示す低速で測定可能な鉄道軌道(縦断線形)の曲率の測定フローチャート、図6は本発明の実施例を示す低速で測定可能な鉄道軌道(縦断線形)の曲線半径の測定フローチャートである。
(1)まず、角度計(ジャイロセンサ、傾斜計、方位センサなど)を用いて、傾斜角を検出する(ステップS21)。
(2)次に、傾斜角に基づいて、鉄道軌道11の2点A′,B′のそれぞれの接線C′,D′の相対角度γ′を計算する(ステップS22)。
(4)次に、距離信号に基づいて、鉄道軌道11の2点A′,B′間の距離d′(サンプリング間隔)を計算する(ステップS24)。
(5)次に、鉄道軌道11の2点A′,B′のそれぞれの接線C′,D′の相対角度γ′/鉄道軌道11の2点A′,B′間の距離d′を計算し、曲率を求める(ステップS25)。ここで、実際には、曲率(1/m)=軌道方向2点A′,B′間の相対傾斜角γ′(rad)/鉄道軌道11の2点A′,B′間の距離d′(m)を求める。
このようにして、鉄道軌道の縦断線形の曲率を測定することができる。
〔D〕鉄道軌道の縦断線形の曲線半径を求める場合(図6参照)
(1)ステップS31〜S34は、上記した図5のステップS21〜S24と同様である。
(3)次いで、ローパスフィルタ処理を施す(ステップS36)。それにより、鉄道軌道11の管理に必要十分な精度の、滑らかな曲線半径が得られる。
鉄道軌道の2点間の距離は、例えば、GPSを利用した場合には直前1秒間の移動距離が得られるので、それを元に計算することになる。この場合、2点間の距離は走行速度が低速であるほど小さくなる。また、実際の軌道検測車では、車輪の回転をエンコーダで検出するなど、何らかの形で等距離間隔の信号を得てデータを記録しているので、2点間の距離はこの信号の間隔に応じた定数となり、計算は非常に単純となる。
また、上記実施例では、軌道検測車による計測に基づいて曲率・曲線半径を測定する場合について述べたが、車両の形をなしていなくても、本発明の手法を用いて歩行速度で使えるポータブルな機器として展開することも可能である。
A,A′,B,B′ 軌道上の2点
C,C′,D,D′ 鉄道軌道上の2点のそれぞれの接線
γ 2点のそれぞれの接線の相対角度
γ′ 2点のそれぞれの接線の相対角度
d,d′ 鉄道軌道の2点間の距離
R 鉄道軌道の平面線形の曲線半径
R′ 鉄道軌道の縦断線形の曲線半径
Claims (3)
- 軌道検測車に角度計をセットし、該角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、該車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、該計算結果にローパスフィルタ処理を施す、鉄道軌道の曲率・曲線半径測定方法において、前記角度計からの情報が傾斜角であり、前記計算式が前記鉄道軌道の2点間の相対角度/前記鉄道軌道の2点間の距離であり、それによって前記鉄道軌道の縦断線形の曲率を求めることを特徴とする鉄道軌道の曲率・曲線半径測定方法。
- 軌道検測車に角度計をセットし、該角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、該車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、該計算結果にローパスフィルタ処理を施す、鉄道軌道の曲率・曲線半径測定方法において、前記角度計からの情報が傾斜角であり、前記計算式が前記鉄道軌道の2点間の距離/前記鉄道軌道の2点間の相対角度であり、それによって前記鉄道軌道の縦断線形の曲線半径を求めることを特徴とする鉄道軌道の曲率・曲線半径測定方法。
- 軌道検測車に角度計をセットし、該角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、該車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、該計算結果にローパスフィルタ処理を施す、鉄道軌道の曲率・曲線半径測定方法において、前記角度計が測定途中で停止した場合には、前記2点間の相対角の計算の段階で、途中停止直後の数データとして停止直前値を用い、誤差軽減処理を行うことを特徴とする鉄道軌道の曲率・曲線半径測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010021042A JP5345568B2 (ja) | 2010-02-02 | 2010-02-02 | 鉄道軌道の曲率・曲線半径測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010021042A JP5345568B2 (ja) | 2010-02-02 | 2010-02-02 | 鉄道軌道の曲率・曲線半径測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011158372A JP2011158372A (ja) | 2011-08-18 |
| JP5345568B2 true JP5345568B2 (ja) | 2013-11-20 |
Family
ID=44590441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010021042A Expired - Fee Related JP5345568B2 (ja) | 2010-02-02 | 2010-02-02 | 鉄道軌道の曲率・曲線半径測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5345568B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103630104A (zh) * | 2013-12-11 | 2014-03-12 | 甘肃海林中科科技股份有限公司 | 一种测量圆锥滚子球基面曲率半径的方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101345582B1 (ko) | 2012-11-13 | 2013-12-27 | 한국철도기술연구원 | 좌우차륜의 회전수를 이용한 곡선구간 곡률반경 추정방법 |
| JP6274519B2 (ja) * | 2014-03-14 | 2018-02-07 | 新日鐵住金株式会社 | 鉄道車両の車上アタック角測定方法及び装置 |
| CN109883317B (zh) * | 2019-03-06 | 2020-10-13 | 株洲太昌电子信息技术股份有限公司 | 一种基于卫星定位的铁路弯道测绘方法 |
| CN114674197B (zh) * | 2022-02-17 | 2023-03-24 | 成都飞机工业(集团)有限责任公司 | 一种飞机线束弯曲半径测量方法、装置、设备及介质 |
| CN116244841B (zh) * | 2022-12-19 | 2024-02-09 | 中国铁路设计集团有限公司 | 一种轨道交通既有线线路纵断面拟合优化方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2716400B2 (ja) * | 1995-05-16 | 1998-02-18 | 東海旅客鉄道株式会社 | 軌道の曲線区間移動量検出方法および軌道の曲線区間移動量検出装置 |
| JP3148980B2 (ja) * | 1997-11-26 | 2001-03-26 | 東急車輛製造株式会社 | 軌道形状検出装置 |
-
2010
- 2010-02-02 JP JP2010021042A patent/JP5345568B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103630104A (zh) * | 2013-12-11 | 2014-03-12 | 甘肃海林中科科技股份有限公司 | 一种测量圆锥滚子球基面曲率半径的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011158372A (ja) | 2011-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5345568B2 (ja) | 鉄道軌道の曲率・曲線半径測定方法 | |
| JP7037948B2 (ja) | 最適な軌道を算出するための方法 | |
| US7164975B2 (en) | Geometric track and track/vehicle analyzers and methods for controlling railroad systems | |
| US11014587B2 (en) | Track geometry measurement system with inertial measurement | |
| JP2021512813A (ja) | 鉄道車両および軌道区間を検測する方法 | |
| JP5965251B2 (ja) | 軌道位置データ付与システム及び軌道位置データ付与方法 | |
| Boronakhin et al. | MEMS-based inertial system for railway track diagnostics | |
| CN113324510B (zh) | 轨道线路竖曲线曲率检测方法、装置及轨道线路检测系统 | |
| ITTO20100720A1 (it) | Sistema e metodo di misura della rugosita' di una superficie stradale | |
| JPH10168810A (ja) | 道路縦断プロファイル測定装置 | |
| RU2640313C2 (ru) | Способ оценки скорости железнодорожного транспортного средства | |
| CN101798793A (zh) | 一种车载式大波浪路形测量方法及其测量系统 | |
| US7032450B2 (en) | Method and apparatus for measuring speed of land vehicle using accelerometer | |
| JP2008058256A (ja) | 速度算出装置 | |
| JP5901557B2 (ja) | 走行体速度計測方法及び装置 | |
| WO2020175313A1 (ja) | 制御装置、移動体および制御方法 | |
| CN114162170B (zh) | 一种轨道测量系统及测量方法 | |
| US20090094848A1 (en) | Track Twist Monitoring | |
| JP5526433B2 (ja) | 軌道位置データ付与システム及び軌道位置データ付与方法 | |
| CN104929023B (zh) | 一种路面弯沉的快速检测方法 | |
| JP4619890B2 (ja) | 保線設備データの検出および検査装置 | |
| JP2018059770A (ja) | 建築限界離れ測定装置及び建築限界判定装置 | |
| CN113324521B (zh) | 轨道线路坡度检测方法、装置及轨道线路检测系统 | |
| CA2474757C (en) | Track analyzers and methods for controlling railroad systems | |
| JP2012141219A (ja) | 傾斜角検出装置、方法、プログラムおよび記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120423 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130521 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130814 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5345568 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |