JP5292995B2 - Motor control device and electric power steering device - Google Patents
Motor control device and electric power steering device Download PDFInfo
- Publication number
- JP5292995B2 JP5292995B2 JP2008214393A JP2008214393A JP5292995B2 JP 5292995 B2 JP5292995 B2 JP 5292995B2 JP 2008214393 A JP2008214393 A JP 2008214393A JP 2008214393 A JP2008214393 A JP 2008214393A JP 5292995 B2 JP5292995 B2 JP 5292995B2
- Authority
- JP
- Japan
- Prior art keywords
- command value
- current command
- motor control
- voltage
- axis current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/05—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for damping motor oscillations, e.g. for reducing hunting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/06—Rotor flux based control involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2205/00—Indexing scheme relating to controlling arrangements characterised by the control loops
- H02P2205/05—Torque loop, i.e. comparison of the motor torque with a torque reference
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
本発明は、モータ制御装置及び電動パワーステアリング装置に関するものである。 The present invention relates to a motor control device and an electric power steering device.
従来、電動パワーステアリング装置(EPS)のように円滑なモータ回転及び高い静粛性が要求される用途では、多くの場合、その駆動源としてブラシレスモータが採用される。そして、そのモータ制御は、d/q座標系における電流制御に基づき各相(U,V,W)に正弦波通電を行なう構成が一般的となっている。 Conventionally, in applications where smooth motor rotation and high quietness are required, such as an electric power steering device (EPS), a brushless motor is often used as the drive source. The motor control is generally configured such that sine wave energization is performed for each phase (U, V, W) based on current control in the d / q coordinate system.
ところで、このような構成を有するモータ制御装置において、その出力可能な電圧に上限のある場合には、モータの高速回転時等、その要求出力電圧が駆動回路に印加可能な最大電圧(例えば電源電圧)を上回る所謂電圧飽和が発生する可能性があり、これによりトルクリップルや騒音が引き起こされるおそれがある。 By the way, in the motor control device having such a configuration, when there is an upper limit to the output voltage, the required output voltage can be applied to the drive circuit at the maximum voltage (for example, the power supply voltage) when the motor rotates at high speed. So-called voltage saturation may occur, which may cause torque ripple and noise.
そこで、従来、その電圧指令値を制限することにより上記電圧飽和の発生を抑制するための電圧制限処理(電圧飽和ガード)が行なわれている。例えば、駆動回路等の規格・仕様に基づいて、予め当該電圧制限処理における制限値を決定する。そして、図9に示すように、d軸電圧指令値Vd*とq軸電圧指令値Vq*との合成ベクトルVdq*が、その予め設定された電圧制限値Vdq_limを超える場合、即ち電圧飽和時には、その補正後の合成ベクトルVdq*が当該電圧制限値Vdq_lim以下となるように、d軸電圧指令値Vd*及びq軸電圧指令値Vq*を補正する。 Therefore, conventionally, a voltage limiting process (voltage saturation guard) is performed for suppressing the occurrence of the voltage saturation by limiting the voltage command value. For example, the limit value in the voltage limiting process is determined in advance based on the standards and specifications of the drive circuit and the like. As shown in FIG. 9, when the combined vector Vdq * of the d-axis voltage command value Vd * and the q-axis voltage command value Vq * exceeds the preset voltage limit value Vdq_lim, that is, at the time of voltage saturation, The d-axis voltage command value Vd * and the q-axis voltage command value Vq * are corrected so that the corrected combined vector Vdq * is equal to or less than the voltage limit value Vdq_lim.
尚、この図9に示す例では、d軸電圧指令値Vd*を維持した状態でq軸電圧指令値Vq*を低減するが、その他、電圧飽和突入後は、合成ベクトルVdq*の角度が維持されるように、d軸電圧指令値Vd*及びq軸電圧指令値Vq*を補正する構成を採用するものもある(例えば、特許文献1参照)。 In the example shown in FIG. 9, the q-axis voltage command value Vq * is reduced while the d-axis voltage command value Vd * is maintained. In addition, the angle of the combined vector Vdq * is maintained after the voltage saturation. In some cases, a configuration that corrects the d-axis voltage command value Vd * and the q-axis voltage command value Vq * is adopted (see, for example, Patent Document 1).
また、こうした電圧飽和の問題は、弱め界磁制御の実行によりモータの回転領域を拡張することでも対処することができる。例えば、特許文献2には、q軸電流偏差に基づき弱め界磁制御を発動するモータ制御装置(ステアリング装置)が提案されている。更に、特許文献3に記載のモータ制御装置は、電流制御の実行により演算される電圧指令値に基づき電圧飽和の度合いを示す電圧飽和率を演算する。そして、その電圧飽和率に応じて電流指令値の位相を補正し、弱め界磁と併せて電流指令値の低減を実行することにより、効果的に電圧飽和の防止を図る構成となっている。
しかしながら、上記のような電圧制限処理を実行することにより、電圧飽和が発生するような高速・高トルク領域(電圧飽和域)では、q軸電圧指令値Vq*がd軸電圧指令値Vd*に依存して変動することになる。そのため、d/q軸電流の変化が増幅されやすく、その変動がトルクリップルや騒音を引き起こすおそれがある。また、上記特許文献2の従来例ようなq軸電流偏差に基づき弱め界磁制御を発動する構成では、その偏差が閾値に達した段階において既に電圧飽和状態となっていることが多く、その発動に遅れが生じやすいという問題がある。そして、この発動の遅れについては、その弱め界磁制御発動の基礎として、電流偏差に基づき演算される電圧指令値を用いる上記特許文献3の従来例についても同様であり、この点において、なお改善の余地を残すものとなっていた。
However, the q-axis voltage command value Vq * is changed to the d-axis voltage command value Vd * in the high-speed / high-torque region (voltage saturation region) in which voltage saturation occurs by executing the voltage limiting process as described above. It will vary depending on the situation. Therefore, the change in the d / q axis current is likely to be amplified, and the fluctuation may cause torque ripple and noise. Further, in the configuration in which field weakening control is activated based on the q-axis current deviation as in the conventional example of
本発明は、上記問題点を解決するためになされたものであって、その目的は、電圧飽和域においてもトルクリップルや騒音の発生を招くことなく円滑なモータ回転を実現することのできるモータ制御装置及び電動パワーステアリング装置を提供することにある。 The present invention has been made to solve the above-described problems, and its object is to provide a motor control capable of realizing smooth motor rotation without causing torque ripple and noise even in a voltage saturation region. It is providing a device and an electric power steering device.
上記問題点を解決するために、請求項1に記載の発明は、d/q座標系における電流制御の実行によりモータ制御信号を生成するモータ制御信号生成手段と、前記モータ制御信号に基づいてモータに三相の駆動電力を出力する駆動回路とを備えたモータ制御装置であって、前記モータ制御信号生成手段は、前記モータの回転角速度、及び前記d/q座標系の電流指令値に基づいて、前記駆動回路に印加可能な最大電圧に対する要求出力電圧の割合である予想電圧利用率を推定し、その推定される予想電圧利用率が電圧飽和限界に相当する所定値を超えないように前記電流指令値を補正すること、を要旨とする。
In order to solve the above problems, the invention according to
上記構成によれば、電圧飽和の発生を未然に防止することができる。これにより、電圧制限処理を行なうことなく、常にモータ電流を制御することが可能になり、その結果、効果的にトルクリップルや騒音の発生を抑制することができる。更に、電流制御実行前の電流指令値に基づき予想電圧利用率を推定することで、その電流制御における電流指令と実電流との偏差の影響を排除して、電圧飽和に至る過渡的な段階から、いち早く当該電圧飽和の発生を抑制することができる。 According to the above configuration, it is possible to prevent voltage saturation from occurring. As a result, it is possible to always control the motor current without performing the voltage limiting process, and as a result, it is possible to effectively suppress the generation of torque ripple and noise. Furthermore, by estimating the expected voltage utilization rate based on the current command value before the current control is executed, the influence of the deviation between the current command and the actual current in the current control is eliminated, and the transient state leading to the voltage saturation. The generation of the voltage saturation can be suppressed promptly.
請求項2に記載の発明は、前記モータ制御信号生成手段は、前記推定される予想電圧利用率が前記所定値を超えないように弱め界磁制御を実行すべくd軸電流指令値を演算するとともに、前記推定される予想電圧利用率が前記弱め界磁制御により対応可能な限界値を超える場合には、併せてq軸電流指令値を低減することにより、前記予想電圧利用率が前記所定値を超えないように前記補正すること、を要旨とする。 According to a second aspect of the present invention, the motor control signal generating means calculates a d-axis current command value so as to execute field-weakening control so that the estimated expected voltage utilization rate does not exceed the predetermined value. When the estimated expected voltage utilization rate exceeds a limit value that can be handled by the field weakening control, the expected voltage utilization rate does not exceed the predetermined value by reducing the q-axis current command value. The gist is to make the above correction.
上記構成によれば、より幅広い領域において、電圧飽和の発生を防止することができる。また、予想電圧利用率が弱め界磁制御により対応可能な限界値に達した後に、電流指令値の低減制御を併用することで、その出力性能を最大限に引き出すことができる。即ち、電動パワーステアリング装置等の用途においては、その振動や騒音の低減もさることながら、基本性能の向上が最も重要な課題である。そして、上記構成を採用して駆動源であるモータの出力性能を最大限に活かすことにより、高い基本性能と静粛性との両立を実現することができるようになる。 According to the above configuration, the occurrence of voltage saturation can be prevented in a wider area. Moreover, after the expected voltage utilization rate reaches a limit value that can be handled by field-weakening control, the output performance can be maximized by using the current command value reduction control together. That is, in applications such as an electric power steering device, improvement of basic performance is the most important issue as well as reduction of vibration and noise. By adopting the above configuration and making the best use of the output performance of the motor that is the drive source, it is possible to achieve both high basic performance and quietness.
請求項3に記載の発明は、前記モータ制御信号生成手段は、前記推定される予想電圧利用率が前記所定値を超えないようにq軸電流指令値を低減すること、を要旨とする。
請求項4に記載の発明は、前記モータ制御信号生成手段は、前記推定される予想電圧利用率が前記所定値を超えないように弱め界磁制御を実行すべくd軸電流指令値を演算すること、を要旨とする。
The gist of the invention described in claim 3 is that the motor control signal generating means reduces the q-axis current command value so that the estimated expected voltage utilization rate does not exceed the predetermined value.
According to a fourth aspect of the present invention, the motor control signal generating means calculates a d-axis current command value so as to execute field-weakening control so that the estimated expected voltage utilization rate does not exceed the predetermined value. Is the gist.
上記各構成によれば、電圧飽和の発生を未然に防止することができ、これにより電圧制限処理を行なうことなく、常にモータ電流を制御することが可能になる。その結果、効果的にトルクリップルや騒音の発生を抑制することができる。特に、請求項4に記載の発明により弱め界磁制御を実行することで、電流指令値の低減に伴うトルク低下を回避することができ、これにより電圧飽和領域においても高い出力性能を維持することができる。 According to each of the above configurations, the occurrence of voltage saturation can be prevented in advance, thereby making it possible to always control the motor current without performing voltage limiting processing. As a result, generation of torque ripple and noise can be effectively suppressed. In particular, by performing field-weakening control according to the invention described in claim 4, it is possible to avoid a decrease in torque associated with a decrease in the current command value, thereby maintaining high output performance even in the voltage saturation region. .
請求項5に記載の発明は、請求項1〜請求項4の何れか一項に記載のモータ制御装置を備えた電動パワーステアリング装置であることを要旨とする。
上記構成によれば、電圧飽和域においてもトルクリップルや騒音の発生を招くことなく円滑なモータ回転を実現することが可能な電動パワーステアリング装置を提供することができる。
The gist of the invention described in claim 5 is an electric power steering device provided with the motor control device according to any one of
According to the above configuration, it is possible to provide an electric power steering device capable of realizing smooth motor rotation without causing torque ripple or noise even in a voltage saturation region.
本発明によれば、電圧飽和域においてもトルクリップルや騒音の発生を招くことなく円滑なモータ回転を実現することが可能なモータ制御装置及び電動パワーステアリング装置を提供することができる。 According to the present invention, it is possible to provide a motor control device and an electric power steering device capable of realizing smooth motor rotation without causing torque ripple and noise even in a voltage saturation region.
(第1の実施形態)
以下、本発明を電動パワーステアリング装置(EPS)に具体化した第1の実施形態を図面に従って説明する。
(First embodiment)
Hereinafter, a first embodiment in which the present invention is embodied in an electric power steering apparatus (EPS) will be described with reference to the drawings.
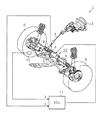
図1は、本実施形態のEPS1の概略構成図である。同図に示すように、ステアリングホイール(ステアリング)2が固定されたステアリングシャフト3は、ラックアンドピニオン機構4を介してラック5に連結されており、ステアリング操作に伴うステアリングシャフト3の回転は、ラックアンドピニオン機構4によりラック5の往復直線運動に変換される。そして、このラック5の往復直線運動により操舵輪6の舵角が変更されるようになっている。
FIG. 1 is a schematic configuration diagram of the
また、EPS1は、操舵系にステアリング操作を補助するためのアシスト力を付与する操舵力補助装置としてのEPSアクチュエータ10と、該EPSアクチュエータ10の作動を制御する制御手段としてのECU11とを備えている。
Further, the
本実施形態のEPSアクチュエータ10は、その駆動源であるモータ12がラック5と同軸に配置された所謂ラック型のEPSアクチュエータであり、モータ12が発生するアシストトルクは、ボールねじ機構(図示略)を介してラック5に伝達される。尚、本実施形態のモータ12は、ブラシレスモータであり、ECU11から三相(U,V,W)の駆動電力の供給を受けることにより回転する。そして、モータ制御装置としてのECU11は、このモータ12が発生するアシストトルクを制御することにより、操舵系に付与するアシスト力を制御する(パワーアシスト制御)。
The
本実施形態では、ECU11には、トルクセンサ14及び車速センサ15が接続されている。そして、ECU11は、これらトルクセンサ14及び車速センサ15によりそれぞれ検出される操舵トルクτ及び車速Vに基づいて、EPSアクチュエータ10の作動、即ちパワーアシスト制御を実行する。
In the present embodiment, a torque sensor 14 and a
次に、本実施形態のEPSの電気的構成について説明する。
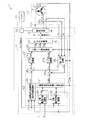
図2は、本実施形態のEPSの制御ブロック図である。同図に示すように、ECU11は、モータ制御信号を出力するモータ制御信号出力手段としてのマイコン17と、モータ制御信号に基づいてモータ12に三相の駆動電力を供給する駆動回路18とを備えている。
Next, the electrical configuration of the EPS of this embodiment will be described.
FIG. 2 is a control block diagram of the EPS of this embodiment. As shown in the figure, the
本実施形態の駆動回路18は、直列に接続された一対のスイッチング素子を基本単位(アーム)として各相に対応する3つのアームを並列接続してなる周知のPWMインバータであり、マイコン17の出力するモータ制御信号は、駆動回路18を構成する各スイッチング素子のオンduty比を規定するものとなっている。そして、モータ制御信号が各スイッチング素子のゲート端子に印加され、そのモータ制御信号に応答して各スイッチング素子がオン/オフすることにより、バッテリ19の電源電圧Vbに基づく三相(U,V,W)の駆動電力を生成してモータ12へと出力する構成になっている。
The
本実施形態では、ECU11には、モータ12に通電される各相電流値Iu,Iv,Iwを検出するための電流センサ20u,20v,20w、及びモータ12の回転角θを検出するための回転角センサ21が接続されている。そして、マイコン17は、これら各センサの出力信号に基づき検出されたモータ12の各相電流値Iu,Iv,Iw及び回転角θ、並びに上記操舵トルクτ及び車速Vに基づいて駆動回路18にモータ制御信号を出力する。
In the present embodiment, the
尚、以下に示すマイコン17内の各制御ブロックは、同マイコン17が実行するコンピュータプログラムにより実現されるものである。
詳述すると、マイコン17は、操舵系に付与するアシスト力の制御目標量として電流指令値を演算する電流指令値演算部22と、上記駆動回路18の作動制御するためのモータ制御信号を生成するモータ制御信号生成手段としてのモータ制御信号生成部23とを備えている。
Each control block in the
More specifically, the
本実施形態の電流指令値演算部22は、q軸電流指令値演算部24を有しており、同q軸電流指令値演算部24は、上記トルクセンサ14及び車速センサ15により検出された操舵トルクτ及び車速Vに基づいて、d/q座標系におけるq軸電流指令値Iq*を演算する。そして、電流指令値演算部22は、このq軸電流指令値Iq*に後述する補正処理を施した後のq軸電流指令値Iq**をモータ制御信号生成部23へと出力する。
The current command
モータ制御信号生成部23には、電流指令値演算部22の出力するq軸電流指令値Iq**とともに、各電流センサ20u,20v,20wにより検出された各相電流値Iu,Iv,Iw、及び回転角センサ21により検出された回転角θが入力される。尚、本実施形態では、d軸電流指令値Id*には「Id*=0」が用いられる。そして、モータ制御信号生成部23は、これら各相電流値Iu,Iv,Iw、及び回転角θ(電気角)に基づいて、d/q座標系における電流フィードバック制御を実行することによりモータ制御信号を生成する。
The motor
即ち、モータ制御信号生成部23において、各相電流値Iu,Iv,Iwは、回転角θとともに3相/2相変換部25に入力され、同3相/2相変換部25によりd/q座標系のd軸電流値Id及びq軸電流値Iqに変換される。また、モータ制御信号生成部23に入力されたq軸電流指令値Iq**は、上記q軸電流値Iqとともに減算器26qに入力され、d軸電流指令値Id*は、d軸電流値Idとともに減算器26dに入力される。これら減算器26d,26qにおいて演算されたd軸電流偏差ΔId及びq軸電流偏差ΔIqは、それぞれ対応するF/B制御部27d,27qに入力される。そして、これら各F/B制御部27d,27qにおいて、その制御目標値であるd軸電流指令値Id*及びq軸電流指令値Iq**に実電流であるd軸電流値Id及びq軸電流値Iqを追従させためのフィードバック制御が行われる。具体的には、F/B制御部27d,27qは、入力されたd軸電流偏差ΔId及びq軸電流偏差ΔIqに所定のF/Bゲイン(PIゲイン)を乗ずることにより、d軸電圧指令値Vd*及びq軸電圧指令値Vq*を演算する。これらd軸電圧指令値Vd*及びq軸電圧指令値Vq*は、回転角θとともに2相/3相変換部29に入力され、同2相/3相変換部29において三相の電圧指令値Vu*,Vv*,Vw*に変換される。
That is, in the motor control
2相/3相変換部29において演算された各電圧指令値Vu*,Vv*,Vw*は、PWM変換部30に入力され、同PWM変換部30において、該各電圧指令値Vu*,Vv*,Vw*に対応するduty指令値が生成される。そして、モータ制御信号生成部23は、これら各duty指令値に示されるオンduty比を有するモータ制御信号を生成し、マイコン17は、そのモータ制御信号を、駆動回路18を構成する各スイッチング素子(のゲート端子)に出力することにより、同駆動回路18の作動、即ちモータ12への駆動電力の供給を制御する。
The voltage command values Vu *, Vv *, and Vw * calculated in the two-phase / three-
(電圧飽和防止制御)
次に、本実施形態における電圧飽和防止制御の態様について説明する。
図2に示すように、本実施形態の電流指令値演算部22には、上記q軸電流指令値演算部24が演算するq軸電流指令値Iq*について、その補正処理を実行するq軸電流指令値補正演算部31が設けられている。そして、本実施形態では、このq軸電流指令値補正演算部31における補正処理によって、上述のような電圧飽和の発生を防止する構成となっている。
(Voltage saturation prevention control)
Next, the mode of voltage saturation prevention control in this embodiment will be described.
As shown in FIG. 2, the current command
詳述すると、本実施形態の電流指令値演算部22は、駆動回路18に印加可能な最大電圧Vmaxに対する要求出力電圧の割合である予想電圧利用率fを演算(推定)する予想電圧利用率演算部32を備えている。そして、上記q軸電流指令値補正演算部31は、この予想電圧利用率演算部32により推定される予想電圧利用率fに基づいて、q軸電流指令値Iq*を補正する。
More specifically, the current command
さらに詳述すると、本実施形態の予想電圧利用率演算部32には、モータ12の回転角速度(電気角速度)ω及びq軸電流指令値Iq*が入力される。また、本実施形態の駆動回路18に印加可能な最大電圧Vmaxは電源電圧Vbであることから、予想電圧利用率演算部32には、当該駆動回路18とバッテリ19との間の電力供給線に設けられた電圧センサ33により検出される電源電圧Vbが入力される。そして、予想電圧利用率演算部32は、これら回転角速度ω及びq軸電流指令値Iq*、並びに電源電圧Vb(最大電圧Vmax)に基づいて、予想電圧利用率fを推定する。
More specifically, the expected voltage
具体的には、本実施形態の予想電圧利用率演算部32は、次の(1)式に基づいて、予想電圧利用率fの推定演算を実行する。
Specifically, the expected voltage utilization

即ち、d軸電流指令値Id*は「Id*=0」、q軸電流指令値Iq*の時間的変動は小さいとした場合であって、且つ低負荷・低速回転時(通常時)には、次の(2)(3)式に示す電圧方程式が成立する。 That is, the d-axis current command value Id * is “Id * = 0”, and the q-axis current command value Iq * is assumed to be small in time variation, and at low load / low speed rotation (normal time). The voltage equations shown in the following equations (2) and (3) are established.
そして、本実施形態では、これら(6)(7)式に基づくq軸電流指令値Iq*の補正、つまり、q軸電流指令値Iq*を低減する補正を実行することにより、電圧飽和の発生を防止する構成となっている。 In this embodiment, the voltage saturation is generated by executing the correction of the q-axis current command value Iq * based on the equations (6) and (7), that is, the correction for reducing the q-axis current command value Iq *. It is the composition which prevents.
次に、上記のように構成された本実施形態の電圧飽和防止制御の処理手順を説明する。
図3のフローチャートに示すように、本実施形態のマイコン17は、各状態量を取得すると(ステップ101)、先ずq軸電流指令値Iq*を演算する(ステップ102)。次に、マイコン17は、上記(1)式に基づいて、予想電圧利用率fを演算し(ステップ103)、その推定された予想電圧利用率fが電圧飽和限界に相当する所定値f0を超えるか否かを判定する(ステップ104)。そして、当該予想電圧利用率fが所定値f0を超える場合(f>f0、ステップ104:YES)には、上記(6)(7)式に基づき新たなq軸電流指令値Iq**を演算することにより、上記ステップ102において演算されたq軸電流指令値Iq*の補正処理(更新)を実行する(ステップ105)。
Next, a processing procedure of voltage saturation prevention control of the present embodiment configured as described above will be described.
As shown in the flowchart of FIG. 3, when the
尚、上記ステップ104において、その推定された予想電圧利用率fが所定値f0を超えない場合(f≦f0、ステップ104:NO)には、このような新たなq軸電流指令値Iq**の演算による補正処理(更新)は行なわれない(Iq**=Iq*、ステップ106)。
In
そして、本実施形態のマイコン17は、その補正処理後のq軸電流指令値Iq**に基づいて、上記のようなd/q座標系における電流制御を実行する構成となっている(ステップ107)。
The
以上、本実施形態によれば、以下のような作用・効果を得ることができる。
(1)駆動回路18に印加可能な最大電圧Vmaxに対する要求出力電圧の割合である予想電圧利用率fを推定し、当該予想電圧利用率fが電圧飽和限界に相当する所定値を超えないようにq軸電流指令値Iq*を補正することで、未然に電圧飽和の発生を防止することができる。これにより、電圧制限処理を行なうことなく、常にモータ電流を制御することが可能になり、その結果、効果的にトルクリップルや騒音の発生を抑制することができる。
As described above, according to the present embodiment, the following operations and effects can be obtained.
(1) Estimating the expected voltage utilization factor f, which is the ratio of the required output voltage to the maximum voltage Vmax that can be applied to the
(2)更に、電流制御実行前のq軸電流指令値Iq*に基づき予想電圧利用率fを推定することで、その電流制御における電流指令(Iq*)と実電流(Iq)との偏差の影響を排除して、電圧飽和に至る過渡的な段階から、いち早く当該電圧飽和の発生を抑制することができる。 (2) Further, by estimating the expected voltage utilization factor f based on the q-axis current command value Iq * before execution of current control, the deviation between the current command (Iq *) and the actual current (Iq) in the current control is estimated. It is possible to suppress the occurrence of the voltage saturation promptly from the transient stage leading to the voltage saturation by eliminating the influence.
(第2の実施形態)
以下、本発明を電動パワーステアリング装置(EPS)に具体化した第2の実施形態を図面に従って説明する。
(Second Embodiment)
Hereinafter, a second embodiment in which the present invention is embodied in an electric power steering device (EPS) will be described with reference to the drawings.
尚、本実施形態と上記第1の実施形態との主たる相違点は、その電流指令値演算部の構成及び電圧飽和防止制御の態様についてのみである。このため、説明の便宜上、第1の実施形態と同一の部分については同一の符号を付すこととして、その説明を省略する。 The main difference between the present embodiment and the first embodiment is only the configuration of the current command value calculation unit and the mode of voltage saturation prevention control. For this reason, for convenience of explanation, the same parts as those in the first embodiment are denoted by the same reference numerals, and the explanation thereof is omitted.
図4に示すように、本実施形態の電流指令値演算部42には、上記第1の実施形態におけるq軸電流指令値補正演算部31(図2参照)に代えて、d軸電流指令値Id*の演算を実行するd軸電流指令値演算部43が設けられるとともに、予想電圧利用率演算部32の推定する予想電圧利用率fは、このd軸電流指令値演算部43に入力される。そして、その推定される予想電圧利用率fが、電圧飽和限界に相当する所定値f0を超える場合(f>f0)には、このd軸電流指令値演算部43において、弱め界磁制御を実行するためのd軸電流指令値Id*を演算、即ち弱め界磁電流を演算することにより、その電圧飽和の発生を抑える構成となっている。
As shown in FIG. 4, in the current command
具体的には、本実施形態のd軸電流指令値演算部43は、次の(8)式に基づいて、弱め界磁電流(d軸電流指令値Id*)を演算する。
Specifically, the d-axis current command
そこで、先ず、上記(1)式から(11)式を減算することにより次の(12)式を得る。 Therefore, first, the following equation (12) is obtained by subtracting the equation (11) from the above equation (1).
このように、本実施形態のマイコン17は、推定される予想電圧利用率fが電圧飽和限界に相当する所定値f0を超える場合(f>f0、図5参照、ステップ204:YES)には、上記(8)式に基づきd軸電流指令値Id*を演算する(ステップ205)。そして、その弱め界磁電流に相当するd軸電流指令値Id*(及びq軸電流指令値Iq*)を用いて電流制御を実行することにより(ステップ206)、電圧飽和の発生を抑えつつ効率よく制御することが可能となっている。
As described above, the
尚、上記ステップ204において、その予想電圧利用率fが所定値f0を超えない場合(f≦f0、ステップ104:NO)には、マイコン17は、d軸電流指令値Id*を「Id*=0」と演算する(ステップ207)。そして、その「Id*=0」で電流制御を行なうことにより、上記のような弱め界磁制御を実行しない。
In
以上、本実施形態によれば、上記第1の実施形態と同様、電圧飽和に至る過渡的な段階から、当該電圧飽和の発生を未然に防止して、電圧制限処理を行なうことなく常にモータ電流を制御することが可能になる。その結果、効果的にトルクリップルや騒音の発生を抑制することができる。加えて、電流指令値の低減に伴うトルク低下を回避することができ、これにより電圧飽和領域においても高い出力性能を維持することができる。 As described above, according to the present embodiment, as in the first embodiment, from the transient stage leading to voltage saturation, the occurrence of the voltage saturation is prevented in advance, and the motor current is always performed without performing the voltage limiting process. Can be controlled. As a result, generation of torque ripple and noise can be effectively suppressed. In addition, it is possible to avoid a decrease in torque associated with a decrease in the current command value, thereby maintaining high output performance even in the voltage saturation region.
(第3の実施形態)
以下、本発明を電動パワーステアリング装置(EPS)に具体化した第3の実施形態を図面に従って説明する。
(Third embodiment)
Hereinafter, a third embodiment in which the present invention is embodied in an electric power steering apparatus (EPS) will be described with reference to the drawings.
尚、本実施形態と上記第1及び第2の実施形態との主たる相違点は、その電流指令値演算部の構成及び電圧飽和防止制御の態様についてのみである。このため、説明の便宜上、第1及び第2の実施形態と同一の部分については同一の符号を付すこととして、その説明を省略する。 The main difference between this embodiment and the first and second embodiments is only the configuration of the current command value calculation unit and the mode of voltage saturation prevention control. For this reason, for convenience of explanation, the same parts as those in the first and second embodiments are denoted by the same reference numerals, and the explanation thereof is omitted.
図6に示すように、本実施形態の電流指令値演算部52には、電圧飽和の発生を防止すべくq軸電流指令値Iq*の補正を実行するq軸電流指令値補正演算部31、及び弱め界磁制御を実行するためのd軸電流指令値Id*の演算するd軸電流指令値演算部43が設けられている。そして、本実施形態の電流指令値演算部52は、その予想電圧利用率演算部32において推定される予想電圧利用率fに基づいて、電圧飽和を防止するための弱め界磁制御及び電流指令値(q軸電流指令値Iq*)の低減制御を実行する構成となっている。
As shown in FIG. 6, the current command
具体的には、本実施形態のd軸電流指令値演算部43は、予想電圧利用率演算部32において推定される予想電圧利用率fが、次の(13)式に示される弱め界磁制御により対応可能な限界値、即ち限界電圧利用率fmaxを超える場合(f>fmax)には、以下の(14)式により弱め界磁電流(d軸電流指令値Id*)を演算する。
Specifically, in the d-axis current command
即ち、弱め界磁電流として機能するd軸電流には限界があり、その限界を超えるd軸電流指令値Id*を用いても電圧飽和抑制の効果を得ることができない。具体的には、上記(8)式に示される弱め界磁電流(d軸電流指令値Id*)の演算式が成立、即ち実数解を有するためには、同(8)式の分子の「√」内が「0以上」でなければならない。そして、この条件が成立する予想電圧利用率fの範囲が次の(15)式に示す範囲であり、その上限値が上記限界電圧利用率fmaxである。 That is, there is a limit to the d-axis current that functions as a field weakening current, and even if a d-axis current command value Id * exceeding the limit is used, the effect of suppressing voltage saturation cannot be obtained. Specifically, in order to establish the calculation formula of the field weakening current (d-axis current command value Id *) shown in the above equation (8), that is, to have a real solution, the numerator “ √ ”must be“ 0 or more ”. The range of the expected voltage utilization rate f that satisfies this condition is the range shown in the following equation (15), and the upper limit value is the limit voltage utilization rate fmax.
次に、上記のように構成された本実施形態における電圧飽和防止制御の処理手順を説明する。
尚、以下に示す図8のフローチャートにおけるステップ301〜ステップ304の処理は、上記図3のフローチャート中に示されるステップ101〜ステップ104の処理と同一であるため、その説明を省略する。
Next, a processing procedure of voltage saturation prevention control in the present embodiment configured as described above will be described.
Note that the processing in
同図に示すように、本実施形態のマイコン17は、推定される予想電圧利用率fが電圧飽和限界に相当する所定値f0を超える場合(f>f0、ステップ304:YES)、次に上記(13)式により限界電圧利用率fmaxを演算する(ステップ305)。そして、予想電圧利用率fがその限界電圧利用率fmax以下であるか否かを判定し(ステップ306)、その予想電圧利用率fが限界電圧利用率fmax以下である場合(f≦fmax、ステップ306:YES)には、上記第2の実施形態と同様、上記(8)式に基づいて弱め界磁電流(d軸電流指令値Id*)を演算する(ステップ307)。尚、この場合には、q軸電流指令値Iq*の補正処理は実行されない(Iq**=Iq*、ステップ308)。
As shown in the figure, the
一方、上記ステップ306において、予想電圧利用率fが限界電圧利用率fmaxを超える場合(f>fmax、ステップ306:NO)、マイコン17は、上記(14)式により弱め界磁電流(d軸電流指令値Id*)を演算する(ステップ309)。そして、更に上記(16)(17)式に基づき新たなq軸電流指令値Iq**を演算することにより、ステップ302において演算されたq軸電流指令値Iq*の補正処理(更新)を実行する(ステップ310)。
On the other hand, when the expected voltage utilization rate f exceeds the limit voltage utilization rate fmax in step 306 (f> fmax, step 306: NO), the
尚、上記ステップ304において、推定される予想電圧利用率fが電圧飽和限界に相当する所定値f0以下である場合(f≦f0、ステップ304:NO)、マイコン17は、弱め界磁電流を演算せず(Id*=0、ステップ311)、q軸電流指令値Iq*の補正処理も実行しない(Iq**=Iq*、ステップ312)。
In
このように、本実施形態のマイコン17は、その推定される予想電圧利用率fに応じてd/q座標系の各電流指令値(Id*,Iq**)の演算形態を切り替える。そして、これらステップ307〜ステップ311を実行することにより演算(補正)された各電流指令値(Id*,Iq**)を用いて電流制御を実行する(ステップ313)。
As described above, the
以上、本実施形態によれば、より幅広い領域において、電圧飽和の発生を防止することができる。また、特に、予想電圧利用率fが弱め界磁制御により対応可能な限界値、即ち限界電圧利用率fmaxに達した後に、電流指令値(q軸電流指令値Iq*)の低減制御を併用することで、その出力性能を最大限に引き出すことができる。即ち、EPSにおいては、その振動や騒音の低減もさることながら、基本性能の向上が最も重要な課題である。そして、上記構成を採用して駆動源であるモータ12の出力性能を最大限に活かすことにより、高い基本性能と静粛性とを併せ持つ優れたEPSを提供することができるようになる。
As described above, according to the present embodiment, it is possible to prevent the occurrence of voltage saturation in a wider area. In particular, when the expected voltage utilization rate f reaches a limit value that can be dealt with by field weakening control, that is, the limit voltage utilization rate fmax, reduction control of the current command value (q-axis current command value Iq *) is also used. , Can maximize its output performance. That is, in EPS, improvement of basic performance is the most important issue as well as reduction of vibration and noise. And by adopting the above configuration and making the best use of the output performance of the
なお、上記各実施形態は以下のように変更してもよい。
・上記各実施形態では、q軸電流指令値補正演算部31やd軸電流指令値演算部43とは別体に、予想電圧利用率演算部32を設ける構成としたが、これらを一体とした構成としてもよい。
In addition, you may change each said embodiment as follows.
In each of the above embodiments, the expected voltage utilization
・上記各実施形態では、説明の便宜上、電圧制限処理は省略したが、これを併用する構成としてもよい。
・更に、上記各実施形態では、特に言及しなかったが、弱め界磁制御による減磁作用を考慮してd軸電流指令値Id*を制限する構成としてもよい。
In each of the above embodiments, the voltage limiting process is omitted for convenience of explanation, but a configuration in which this is used together may be used.
Furthermore, although not particularly mentioned in the above embodiments, the d-axis current command value Id * may be limited in consideration of the demagnetizing action by the field weakening control.
・上記各実施形態では、電流フィードバック制御の実行によりモータ制御信号を生成する構成に具体化したが、オープン制御の実行によりモータ制御信号を生成する構成に具体化してもよい。 In each of the above embodiments, the motor control signal is generated by executing current feedback control. However, the motor control signal may be generated by executing open control.
1…電動パワーステアリング装置(EPS)、10…EPSアクチュエータ、11…EPSECU、12…モータ、17…マイコン、18…駆動回路、22,42,52…電流指令値演算部、23…モータ制御信号生成部、31…q軸電流指令値補正演算部、32…予想電圧利用率演算部、43…d軸電流指令値演算部、Id*…d軸電流指令値、Iq*,Iq**…q軸電流指令値、ω…回転角速度、Vb…電源電圧、Vmax…最大電圧、f,f´…予想電圧利用率、f0…所定値、fmax…限界電圧利用率。
DESCRIPTION OF
Claims (5)
前記モータ制御信号生成手段は、前記モータの回転角速度、及び前記d/q座標系の電流指令値に基づいて、前記駆動回路に印加可能な最大電圧に対する要求出力電圧の割合である予想電圧利用率を推定し、その推定される予想電圧利用率が電圧飽和限界に相当する所定値を超えないように前記電流指令値を補正すること、を特徴とするモータ制御装置。 Motor control device comprising motor control signal generating means for generating a motor control signal by executing current control in a d / q coordinate system, and a drive circuit for outputting three-phase drive power to the motor based on the motor control signal Because
The motor control signal generation means is an expected voltage utilization rate that is a ratio of a required output voltage to a maximum voltage that can be applied to the drive circuit based on a rotational angular velocity of the motor and a current command value of the d / q coordinate system. And correcting the current command value so that the estimated expected voltage utilization rate does not exceed a predetermined value corresponding to the voltage saturation limit.
前記モータ制御信号生成手段は、前記推定される予想電圧利用率が前記所定値を超えないように弱め界磁制御を実行すべくd軸電流指令値を演算するとともに、前記推定される予想電圧利用率が前記弱め界磁制御により対応可能な限界値を超える場合には、併せてq軸電流指令値を低減することにより、前記予想電圧利用率が前記所定値を超えないように前記補正すること、を特徴とするモータ制御装置。 The motor control device according to claim 1,
The motor control signal generating means calculates a d-axis current command value to execute field-weakening control so that the estimated expected voltage utilization rate does not exceed the predetermined value, and the estimated expected voltage utilization rate is When the limit value that can be dealt with by the field weakening control is exceeded, the correction is made so that the expected voltage utilization rate does not exceed the predetermined value by reducing the q-axis current command value together. Motor control device.
前記モータ制御信号生成手段は、前記推定される予想電圧利用率が前記所定値を超えないようにq軸電流指令値を低減すること、を特徴とするモータ制御装置。 The motor control device according to claim 1,
The motor control device, wherein the motor control signal generating means reduces a q-axis current command value so that the estimated expected voltage utilization rate does not exceed the predetermined value.
前記モータ制御信号生成手段は、前記推定される予想電圧利用率が前記所定値を超えないように弱め界磁制御を実行すべくd軸電流指令値を演算すること、
を特徴とするモータ制御装置。 The motor control device according to claim 1,
The motor control signal generating means calculates a d-axis current command value to execute field-weakening control so that the estimated expected voltage utilization rate does not exceed the predetermined value;
A motor control device.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008214393A JP5292995B2 (en) | 2008-08-22 | 2008-08-22 | Motor control device and electric power steering device |
| PCT/JP2009/064547 WO2010021353A1 (en) | 2008-08-22 | 2009-08-20 | Motor control device and electric power steering device |
| EP09808289.4A EP2317642A4 (en) | 2008-08-22 | 2009-08-20 | Motor control device and electric power steering device |
| CN2009801194177A CN102047552B (en) | 2008-08-22 | 2009-08-20 | Motor control device and electric power steering device |
| US12/990,687 US8686672B2 (en) | 2008-08-22 | 2009-08-20 | Motor control device and electric power steering device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008214393A JP5292995B2 (en) | 2008-08-22 | 2008-08-22 | Motor control device and electric power steering device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010051125A JP2010051125A (en) | 2010-03-04 |
| JP5292995B2 true JP5292995B2 (en) | 2013-09-18 |
Family
ID=41707227
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008214393A Expired - Fee Related JP5292995B2 (en) | 2008-08-22 | 2008-08-22 | Motor control device and electric power steering device |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8686672B2 (en) |
| EP (1) | EP2317642A4 (en) |
| JP (1) | JP5292995B2 (en) |
| CN (1) | CN102047552B (en) |
| WO (1) | WO2010021353A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017055552A (en) * | 2015-09-09 | 2017-03-16 | 日立オートモティブシステムズ株式会社 | Motor controller |
| WO2020095479A1 (en) | 2018-11-08 | 2020-05-14 | 日本精工株式会社 | Motor control device, electric actuator product and electric power steering device |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011194914A (en) * | 2010-03-17 | 2011-10-06 | Honda Motor Co Ltd | Electric power steering device and electric motor driving controller used for the device |
| JP5741082B2 (en) * | 2011-03-10 | 2015-07-01 | 株式会社豊田自動織機 | Motor inverter control method and control device |
| DE112012002333B9 (en) * | 2011-05-31 | 2021-10-14 | Mitsubishi Electric Corp. | LOAD CHARACTERISTICS ESTIMATE DEVICE FOR A DRIVE MACHINE |
| KR101382749B1 (en) * | 2012-04-13 | 2014-04-08 | 현대자동차주식회사 | Method for correcting resolver offset |
| JP5920067B2 (en) * | 2012-07-06 | 2016-05-18 | 株式会社島津製作所 | Motor control device |
| GB201218674D0 (en) * | 2012-10-17 | 2012-11-28 | Trw Ltd | Control strategy for a motor of an electric assisted steering system |
| US9531311B2 (en) * | 2013-03-13 | 2016-12-27 | Steering Solutions Ip Holding Corporation | Generation of a current reference to control a brushless motor |
| KR101490624B1 (en) | 2013-10-11 | 2015-02-05 | 박윤수 | Feeder Utilization & Efficiency Factor Indication Switchgear |
| JP5992113B2 (en) * | 2013-11-08 | 2016-09-14 | 三菱電機株式会社 | AC rotating machine control device |
| US10389289B2 (en) | 2014-02-06 | 2019-08-20 | Steering Solutions Ip Holding Corporation | Generating motor control reference signal with control voltage budget |
| US9479102B2 (en) * | 2014-04-15 | 2016-10-25 | Solum Co., Ltd. | Apparatus for driving interior permanent magnet synchronous motor and method of controlling the apparatus |
| US10003285B2 (en) | 2014-06-23 | 2018-06-19 | Steering Solutions Ip Holding Corporation | Decoupling current control utilizing direct plant modification in electric power steering system |
| JP6103155B2 (en) * | 2014-09-30 | 2017-03-29 | 株式会社安川電機 | Power converter, power generation system, and current control method |
| JP6572124B2 (en) * | 2015-12-22 | 2019-09-04 | オークマ株式会社 | Motor control device |
| DE102016207375A1 (en) * | 2016-04-29 | 2017-11-02 | Robert Bosch Gmbh | Method and device for controlling an electric machine |
| US10133255B2 (en) | 2016-07-08 | 2018-11-20 | Ricoh Compant, Ltd. | Motor controller, motor driver, and motor driving system |
| JP6701032B2 (en) * | 2016-08-26 | 2020-05-27 | 株式会社ジェイテクト | Steering control device |
| US10135368B2 (en) * | 2016-10-01 | 2018-11-20 | Steering Solutions Ip Holding Corporation | Torque ripple cancellation algorithm involving supply voltage limit constraint |
| US10411634B2 (en) * | 2017-11-28 | 2019-09-10 | Steering Solutions Ip Holding Corporation | Controller anti-windup for permanent magnet synchronous machines |
| JP6986464B2 (en) * | 2018-02-13 | 2021-12-22 | 日立Astemo株式会社 | Motor control device and motor control method |
| JP6662504B1 (en) * | 2018-11-08 | 2020-03-11 | 日本精工株式会社 | Motor control device, electric actuator product, and electric power steering device |
| CN109302117A (en) * | 2018-11-30 | 2019-02-01 | 上海大郡动力控制技术有限公司 | Permanent magnet synchronous motor voltage utilization automatic optimizing method |
| CN111404429B (en) * | 2018-12-28 | 2021-11-12 | 比亚迪股份有限公司 | Vehicle, motor control method and device thereof and computer readable storage medium |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3383682B2 (en) | 1992-11-04 | 2003-03-04 | ファナック株式会社 | Current control method for AC servomotor |
| JPH10313600A (en) * | 1997-05-09 | 1998-11-24 | Matsushita Electric Ind Co Ltd | Motor control device |
| JP3559258B2 (en) * | 2001-07-30 | 2004-08-25 | 三菱電機株式会社 | Steering control device |
| JP4007344B2 (en) * | 2004-06-29 | 2007-11-14 | アイシン・エィ・ダブリュ株式会社 | Electric drive control device, electric drive control method, and program |
| JP2006129632A (en) * | 2004-10-29 | 2006-05-18 | Matsushita Electric Ind Co Ltd | Motor drive unit |
| JP4896562B2 (en) * | 2006-03-30 | 2012-03-14 | アイシン・エィ・ダブリュ株式会社 | Electric drive control device and electric drive control method |
| JP4466600B2 (en) * | 2006-03-31 | 2010-05-26 | アイシン・エィ・ダブリュ株式会社 | Electric drive control device and electric drive control method |
| JP5055911B2 (en) * | 2006-09-20 | 2012-10-24 | 日本精工株式会社 | Motor control method and apparatus |
| EP2211457A1 (en) * | 2007-11-15 | 2010-07-28 | Kabushiki Kaisha Yaskawa Denki | Motor control device and control method thereof |
| DE102008062515A1 (en) * | 2007-12-21 | 2009-06-25 | Denso Corporation, Kariya | Device for controlling a torque of a rotary electric machine |
| JP4968089B2 (en) * | 2008-01-28 | 2012-07-04 | アイシン・エィ・ダブリュ株式会社 | Electric motor control device and drive device |
-
2008
- 2008-08-22 JP JP2008214393A patent/JP5292995B2/en not_active Expired - Fee Related
-
2009
- 2009-08-20 EP EP09808289.4A patent/EP2317642A4/en not_active Withdrawn
- 2009-08-20 CN CN2009801194177A patent/CN102047552B/en not_active Expired - Fee Related
- 2009-08-20 WO PCT/JP2009/064547 patent/WO2010021353A1/en active Application Filing
- 2009-08-20 US US12/990,687 patent/US8686672B2/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017055552A (en) * | 2015-09-09 | 2017-03-16 | 日立オートモティブシステムズ株式会社 | Motor controller |
| WO2020095479A1 (en) | 2018-11-08 | 2020-05-14 | 日本精工株式会社 | Motor control device, electric actuator product and electric power steering device |
| US11104374B2 (en) | 2018-11-08 | 2021-08-31 | Nsk Ltd. | Motor control device, electrically driven actuator product, and electrically driven power steering device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102047552A (en) | 2011-05-04 |
| EP2317642A4 (en) | 2017-12-06 |
| CN102047552B (en) | 2013-12-18 |
| EP2317642A1 (en) | 2011-05-04 |
| WO2010021353A1 (en) | 2010-02-25 |
| US8686672B2 (en) | 2014-04-01 |
| JP2010051125A (en) | 2010-03-04 |
| US20110127934A1 (en) | 2011-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5292995B2 (en) | Motor control device and electric power steering device | |
| JP5168448B2 (en) | Motor control device and electric power steering device | |
| JP5470697B2 (en) | Electric power steering device | |
| JP4967829B2 (en) | Electric power steering device | |
| EP2398142B1 (en) | Motor control device and electric power steering device | |
| JP5070867B2 (en) | Motor control device and electric power steering device | |
| WO2010106764A1 (en) | Motor control device and electric power steering apparatus | |
| JP4918870B2 (en) | Motor control device and electric power steering device | |
| JP2009196532A (en) | Electric power steering device | |
| JP2008211909A (en) | Motor control device and electric power steering device | |
| JP2016111788A (en) | Control device for rotary electric machine | |
| JP2011168168A (en) | Electric power steering device | |
| JP2012066728A (en) | Electric power steering device | |
| JP2010098808A (en) | Motor control device | |
| JP5266793B2 (en) | Electric power steering device | |
| JP5176369B2 (en) | Electric power steering device | |
| JP5664945B2 (en) | Motor control device | |
| JP5119991B2 (en) | Electric power steering device | |
| JP2012065416A (en) | Motor controlling device and electric power steering device | |
| JP5082608B2 (en) | Motor control device and electric power steering device | |
| JP2009284728A (en) | Motor control apparatus and electric power-steering arrangement | |
| JP2008155683A (en) | Electric power steering device | |
| JP2012235556A (en) | Motor controller | |
| JP5359687B2 (en) | Control device for electric power steering device | |
| JP2012076694A (en) | Electric power steering device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110801 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130527 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5292995 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |