JP5205110B2 - 超音波撮像装置 - Google Patents
超音波撮像装置 Download PDFInfo
- Publication number
- JP5205110B2 JP5205110B2 JP2008097707A JP2008097707A JP5205110B2 JP 5205110 B2 JP5205110 B2 JP 5205110B2 JP 2008097707 A JP2008097707 A JP 2008097707A JP 2008097707 A JP2008097707 A JP 2008097707A JP 5205110 B2 JP5205110 B2 JP 5205110B2
- Authority
- JP
- Japan
- Prior art keywords
- elements
- ultrasonic imaging
- imaging apparatus
- probe
- function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
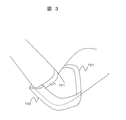
図2(a)に示すように、圧電素子、整合層、バッキング材から形成される素子どうしは、関節(連結部)を介して接続しても、同様の効果が得られる。この素子の拡大図を図11に示す。ここでは、キャタピラのような構造の場合を例に説明する。主に音響レンズ1、整合層8、圧電素子7、バッキング材4からなる音響素子2と、これに隣接する音響素子2の間に関節3(ここではシャフトが関節3の穴に差し込まれることで、このシャフトを軸にした回転が可能になる。)、圧電素子の上下の電極に接続された上部配線6b、下部配線6aから構成される。素子と素子の間には、音響的なアイソレーションを実現し、かつ可動性を妨げないために、シリコーンゴムなどの音響インビーダンスの小さい樹脂に気体を混入した材料を流し込んでおくとよい。気体を混入するには、ガスを内包したシェル構造を持つマイクロバルーンや、発泡ウレタンのような材料などを用いることが出来る。例えば、商品名EXPANCELとして知られるような熱可塑性樹脂を外殻とする有機系マイクロバルーンで粒径が10から100ミクロン程度のものなどが利用できる。この充填剤は、探触子アレイの強度を保つのにも貢献する。圧電素子7は前述のPZT圧電体でも、高分子圧電フィルムでも、cMUTでも良い。配線6は、関節3の可動性に影響を与えないようにするために、関節の回転軸と平行な方向に取り出し、同軸ケーブルやGNDパターンつきのフレキシブルプリント基板などに接続し、ケーブ全体で束ね、装置に接続する。
次に、これまで説明を行ったフレキシブルトランスデューサを使って、トランスデューサ自身の形状を推定し、断層像の撮像を行う方法に関して、説明を行う。
(1)まず、被検体形状のわからない状態で、超音波を対象物に送波し、各受信チャンネル毎に信号の取得を行なう。
(2)次に仮定した初期形状に基づいて、受信のビームフォーミングを行い、初期点応答関数をもとめる。これをPSF0とする。
(3)PSF0が最適となるように、イテレーティブに探触子形状を推定する探索を行う。
(4)探触子形状の推定が終わったら、送信ビームを形成し、対象物に超音波の送信を行い、受信エコーに対しても、形状推定結果に基づいた受信ビームフォーミングを行う。
(5)通常の包絡線検波、フィルタリング処理、Log圧縮、スキャンコンバージョン処理を経て、断層像を生成、ディスプレイに表示する。
(6)探触子の形状変化の起きやすさに応じた頻度で、2,3の処理を適宜行い、形状推定結果の更新を行いながら、撮像を行う。
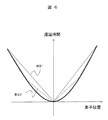
次に、特に本実施例が剛体を仮定した探触子による撮像と異なる、PSF0の最適化プロセスに関して説明を行う。超音波のビームフォーミングは図1に示すように、焦点と各素子位置の間の距離が求め、素子間での距離差を対象物の音速で割ることにより算出される遅延時間を素子毎に与えチャンネル間での加算を行うことにより実現している。このようにして求まる点応答関数は、遅延時間が最も正しいときに、最小(方位方向および伝搬方向ともに)となることが知られているので、遅延時間パターンを変えてみて、点応答関数が最小になる遅延時間パターンを求めればよい。ここで点応答関数が最少とは、点応答関数の幅が最少の意味であり、状況によって、深さ方向の幅を最小にしたり、方位方向の幅を最小にしたり、両者の相加平均や相乗平均などを最小とすることがふさわしい。端から順に計算する場合を図5を用いて、説明する。一番端の素子を原点として、素子間隔をP、i番目の素子の角度をΘi、i−1番目の関節の回転角度をθi-1とすると、i番目の素子位置(Xi,Yi)はi-1番目の素子位置を(Xi-1、Yi-1)及び回転角度Θi−1を用いて、(Xi-1+P/2cosΘi-1+P/2cos(Θi-1+θi-1)、Yi-1+P/2sinΘi-1+P/2sin(Θi-1+θi-1))と算出できる。
つまり、まず一つの方法として、まず一番端の受信ビームに、自由度をΘ1とθ1の二つのパラメータとして、二番目の素子の受信信号に推定遅延時間を与え、加算を行い、ch1とch2の信号加算において、点応答関数が最少となるΘ1とθ1を求める。後は数学的帰納法を使って、順次素子位置を求めていくことで素子全体のΘとθが求めることが出来る。
また、前の実施例で説明を行ったように、各chの受信信号間で相互相関を求め、遅延時間差を推定すれば、素子位置のモデルが上記のようになっても、求めることが出来るため、本実施例の場合は相互相関によって、形状を推定する方式が適している。
(1)伝搬距離が短いことや、皮膚を介さなくて良いことのために、減衰の影響をより受けやすい高い周波数を選択することができる。このため、空間分解能を向上することが出来る。
(2)焦点距離/口径幅が小さいほどビームを絞ることが出来るので、焦点距離をみじかくすることで、ビームの分解能を向上することが出来る。
(3)伝搬にともなう減衰が低減することによって、血球からの信号など、もともと感度が低い信号を、信号対雑音比が比較的良い状態で取得することができる。
(4)間の介在組織が減ることで、対象部位と探触子の相対的な動きを低減することができる。よって、被検体硬さを計測するエラストグラフィーの撮像が容易になったり、ドップラ撮像におけるクラッタ除去が容易になる。
しかし(2)であげたように、口径幅を確保する必要がある。一方生体内に導入する場合は、口腔を介したり、体表に穴をあけて経腹腔鏡的にアプローチしたり、血管からアプローチする必要があるが、いずれにせよ、極力、進行方向への長さを縮め、また進行方向に垂直な面における断面積を小さくする必要がある。導入部分と、撮像場所での周囲のスペースの大きさがあまり変わらない場合には、口径幅を大きくすることが物理的に困難であるために、問題にはならない。しかし経口で導入し、胃の中から周囲の膵臓、肝臓などを撮像する場合や、血管を経由して体内に導入し心臓の心室や心房内から周囲を撮像する場合などにおいては、導入部分より撮像場所において、周囲に空間的な余裕がある。このような場合には、折りたたんで、体内に導入し、体内で探触子を展開、口径を広げることのメリットが大きい。また、体内においては、自由に超音波ゼリーをつけることが困難なために、対象物に形状がフィットすることも望ましいため、形状が変形できることのメリットが大きい。
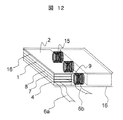
12…シリコン基板上に形成されたcMUT素子、13…シート型アクチュエータ、14…アクチュエータおよびセンサ、15…バネ、16…高分子フィルム、100…フレキシブルトランスデューサ、101…固定バンド、102…素子、103…可動関節、104…不動関節、201…探触子、202…送受切替スイッチ、203…送波ビームフォーマ、204…制御系、205…送波波形メモリ、206…受波ビームフォーマ、207…素子位置推定部、208…検波部、209…スキャンコンバータ、210…表示部
Claims (11)
- 被検体と超音波信号を送受信する複数の素子と、前記複数の素子を相対的に可動に連結する連結部とを備える探触子と、
前記複数の素子の受信信号に基づいて、前記複数の素子の相対的位置情報を演算する演算部と、
前記相対的位置情報の演算に用いた受信信号と前記相対的位置情報とから、画像データを生成する画像データ生成部とを有する超音波撮像装置。 - 前記演算部は、前記相対的位置情報として、前記複数の素子の回転角度を演算することを特徴とする請求項1に記載の超音波撮像装置。
- 前記演算部は、前記相対的位置情報として、前記探触子の形状情報を演算することを特徴とする請求項1に記載の超音波撮像装置。
- 前記演算部は、評価関数を格納する格納部、前記格納部から読み出した評価関数を用いて演算する評価演算部とを有することを特徴とする請求項1に記載の超音波撮像装置。
- 前記格納部は、前記評価関数として点応答関数を格納することを特徴とする請求項4に記載の超音波撮像装置。
- 前記格納部は、前記評価関数として前記複数の素子の受信信号の相互相関を演算する関数を格納することを特徴とする請求項4に記載の超音波撮像装置。
- 前記評価演算部は、前記複数の素子について、素子ごとに束ねて前記受信信号の遅延時間を演算することを特徴とする請求項4に記載の超音波撮像装置。
- 前記評価演算部は、受信信号の前記評価関数として点応答関数を読み出し、前記点応答関数の幅が最小になるように前記受信信号の遅延時間を制御することを特徴とする請求項4に記載の超音波撮像装置。
- 前記複数の素子は、素子幅、間隔幅が少なくとも一部の部位で異なることを特徴とする請求項1に記載の超音波撮像装置。
- 前記複数の素子の相対的な位置を制御するアクチュエータをさらに有することを特徴とする請求項1に記載の超音波撮像装置。
- 前記複数の素子は2次元アレイであることを特徴とする請求項1に記載の超音波撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008097707A JP5205110B2 (ja) | 2008-04-04 | 2008-04-04 | 超音波撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008097707A JP5205110B2 (ja) | 2008-04-04 | 2008-04-04 | 超音波撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009247511A JP2009247511A (ja) | 2009-10-29 |
| JP2009247511A5 JP2009247511A5 (ja) | 2011-05-06 |
| JP5205110B2 true JP5205110B2 (ja) | 2013-06-05 |
Family
ID=41308761
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008097707A Expired - Fee Related JP5205110B2 (ja) | 2008-04-04 | 2008-04-04 | 超音波撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5205110B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011242326A (ja) * | 2010-05-20 | 2011-12-01 | Ihi Aerospace Co Ltd | 超音波探傷装置 |
| JP5588918B2 (ja) * | 2011-04-21 | 2014-09-10 | 日立Geニュークリア・エナジー株式会社 | 超音波検査方法 |
| KR101894391B1 (ko) | 2011-10-05 | 2018-09-04 | 삼성전자주식회사 | 진단영상 생성장치, 의료영상시스템 및 빔포밍 수행방법 |
| JP5962018B2 (ja) | 2012-01-11 | 2016-08-03 | セイコーエプソン株式会社 | 超音波トランスデューサー、超音波プローブ、診断機器および電子機器 |
| JP6139136B2 (ja) * | 2013-01-08 | 2017-05-31 | 学校法人慈恵大学 | 超音波診断治療装置 |
| EP3349663B1 (en) * | 2015-09-16 | 2018-12-05 | Koninklijke Philips N.V. | Ultrasound apparatus and method for medical examination of a subject |
| JP6598760B2 (ja) * | 2015-12-15 | 2019-10-30 | キヤノン株式会社 | 音響波プローブ、及び被検体情報取得装置 |
| JP6700916B2 (ja) * | 2016-03-31 | 2020-05-27 | キヤノン株式会社 | 音響波プローブ、及び情報取得装置 |
| US11744553B2 (en) | 2016-09-29 | 2023-09-05 | Koninklijke Philips N.V. | Ultrasound system, method and computer program product |
| JP2018155546A (ja) * | 2017-03-16 | 2018-10-04 | 株式会社Ihiエアロスペース | 超音波フェーズドアレイ用プローブ及び超音波フェーズドアレイ走査方法 |
| KR102607016B1 (ko) | 2018-01-31 | 2023-11-29 | 삼성메디슨 주식회사 | 초음파 프로브 |
| JP7258352B2 (ja) * | 2019-09-24 | 2023-04-17 | 国立大学法人 東京大学 | 超音波撮像装置 |
| CN113925528B (zh) * | 2020-06-29 | 2023-11-03 | 青岛海信医疗设备股份有限公司 | 多普勒成像方法和超声设备 |
| EP4105653A1 (en) * | 2021-06-18 | 2022-12-21 | Nederlandse Organisatie Voor Toegepast- Natuurwetenschappelijk Onderzoek Tno | Self-calibrating flexible ultrasound array for measuring a curved object |
| JP7648499B2 (ja) * | 2021-10-13 | 2025-03-18 | 日本光電工業株式会社 | 情報処理装置および超音波処理システム |
| CN114145767B (zh) * | 2021-11-30 | 2024-04-19 | 京东方科技集团股份有限公司 | 声波探头、其声波接收阵元的定位方法及其成像方法 |
| JP2024037352A (ja) * | 2022-09-07 | 2024-03-19 | 学校法人同志社 | 超音波画像形成方法および超音波診断装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5775640A (en) * | 1980-10-29 | 1982-05-12 | Hitachi Ltd | Ultrasonic shotographing apparatus |
| JPS59174151A (ja) * | 1983-03-25 | 1984-10-02 | 横河メディカルシステム株式会社 | 超音波映像装置 |
| JPH02246959A (ja) * | 1989-03-20 | 1990-10-02 | Fuji Electric Co Ltd | 超音波プローブ |
| JP3645347B2 (ja) * | 1996-02-23 | 2005-05-11 | 株式会社東芝 | 超音波診断装置及び遅延時間最適化方法 |
| JP3663501B2 (ja) * | 1996-07-19 | 2005-06-22 | 神田通信工業株式会社 | 超音波探触子および超音波検査装置 |
| JP2004089357A (ja) * | 2002-08-30 | 2004-03-25 | Fuji Photo Film Co Ltd | 超音波用探触子及びそれを用いた超音波診断装置 |
| JP5132089B2 (ja) * | 2005-06-16 | 2013-01-30 | 株式会社東芝 | 超音波診断装置、超音波送受信条件適正化プログラム及び超音波送受信条件適正化方法 |
-
2008
- 2008-04-04 JP JP2008097707A patent/JP5205110B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009247511A (ja) | 2009-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5205110B2 (ja) | 超音波撮像装置 | |
| JP5575554B2 (ja) | 超音波診断装置 | |
| JP5719098B2 (ja) | 超音波診断装置 | |
| US20100022883A1 (en) | Ultrasonic diagnostic apparatus | |
| JP5416499B2 (ja) | 超音波診断装置 | |
| JP2010207490A (ja) | 超音波診断装置及び音速推定方法 | |
| JP2002209894A (ja) | 超音波用探触子 | |
| JPH10506809A (ja) | 位相偏差補正のための2dアレーの作動方法及び接続装置 | |
| US20130072798A1 (en) | Object information acquiring apparatus and control method thereof | |
| CN114376618A (zh) | 用于具有机械可调节换能器形状的超声阵列的信号处理的系统和方法 | |
| US8905933B2 (en) | Ultrasonic diagnostic apparatus | |
| JP2018089368A (ja) | 超音波撮像装置及び超音波モニタリング装置 | |
| JP2005168667A (ja) | 超音波診断装置およびその駆動方法 | |
| JP2010187825A (ja) | 超音波診断装置及び受信フォーカス処理方法 | |
| JP2013244159A (ja) | 超音波診断装置及び音速推定方法 | |
| JP5776542B2 (ja) | 超音波プローブおよび超音波検査装置 | |
| WO1996010758A1 (en) | A 2d array for phase aberration correction | |
| JP5842533B2 (ja) | 超音波プローブおよび超音波検査装置 | |
| JP2012200443A (ja) | 超音波診断装置および超音波画像生成方法 | |
| JP5331839B2 (ja) | 超音波プローブおよび超音波診断装置 | |
| JP2014076093A (ja) | 音響波測定装置 | |
| US20090054769A1 (en) | Ultrasonic diagnostic apparatus | |
| US20090088642A1 (en) | Ultrasonic imaging apparatus and ultrasonic imaging method | |
| JP2013244160A (ja) | 超音波診断装置及び音速推定方法 | |
| JP2010233610A (ja) | 超音波プローブ及び超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110323 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130218 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5205110 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |