JP5116565B2 - Control device for hybrid vehicle - Google Patents
Control device for hybrid vehicle Download PDFInfo
- Publication number
- JP5116565B2 JP5116565B2 JP2008147267A JP2008147267A JP5116565B2 JP 5116565 B2 JP5116565 B2 JP 5116565B2 JP 2008147267 A JP2008147267 A JP 2008147267A JP 2008147267 A JP2008147267 A JP 2008147267A JP 5116565 B2 JP5116565 B2 JP 5116565B2
- Authority
- JP
- Japan
- Prior art keywords
- mode
- drive output
- upper limit
- allowable upper
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
本発明はハイブリッド車両の制御装置に関するものであり、特に複数の動力源を駆動させて走行するハイブリッド運転モードと、蓄電装置からの電力を基本に用いて走行する電気走行モードとを切り替えて走行するハイブリッド車両の制御装置に関するものである。 The present invention relates to a control device for a hybrid vehicle, and in particular, switches between a hybrid operation mode that travels by driving a plurality of power sources and an electric travel mode that travels based on electric power from a power storage device. The present invention relates to a control device for a hybrid vehicle.
特許文献1にはハイブリッド自動車に関する発明が記載されている。このハイブリッド自動車は、動力源としてエンジンと蓄電装置およびモータジェネレータとを搭載する。蓄電装置およびモータジェネレータのみを動力源として走行するEVモードで走行中にHVモード移行スイッチがオン操作されると、制御装置は、エンジンも駆動させて走行するHVモードに走行モードを移行する。
しかしながら、特許文献1に記載された技術においては、EVモードとHVモードを単純に切り替えるだけの操作しかできない。実際の走行状況は、エネルギーの使われ方や残量などによりEV走行のみで走れる状態とHVに切り替えなければならない状態とが変化する。そのため、単純に2つのモードを切り替えるという方法では、動力性能を向上させるだけならばHVモードに強制的に切り替えることで達成できるものの、燃費性能を向上させる手法としては充分な性能を得ることが困難である。
However, in the technique described in
本発明は上記のような問題を考え、様々なドライバーの使用条件に対し、燃費と走行性能を確保することが可能なハイブリッド車両の制御装置を提供することを目的としている。 The present invention has been made in consideration of the above-described problems, and an object of the present invention is to provide a hybrid vehicle control device capable of ensuring fuel consumption and running performance under various driver use conditions.
上記課題を解決するために、請求項1に係る発明は、エンジン(例えば、実施形態におけるエンジンE)と、モータ(例えば、実施形態における第1のモータM1)と、前記モータと電力を授受する蓄電装置(例えば、実施形態におけるバッテリLB)と、を備えたハイブリッド車両の制御装置(例えば、実施形態における制御部1)であって、車両に要求される要求駆動出力を取得する要求駆動出力取得手段(例えば、実施形態におけるステップS006)と、前記要求駆動出力取得手段から送信された要求駆動出力を蓄積する要求駆動出力情報蓄積部(例えば、実施形態における情報センター)と、前記モータのみで走行するEV走行モード(例えば、実施形態におけるBATT EVモード)の許容上限駆動出力を決定するEV走行モード許容上限駆動出力決定手段(例えば、実施形態におけるステップS096)と、を備え、前記制御装置は、要求駆動出力が前記EV走行モードの許容上限駆動出力を超えた場合に少なくとも前記エンジンを運転させるエンジン運転モード(例えば、実施形態におけるCHARGE EVモードおよびE−PASS EVモード)と、前記EV走行モードとを切り換え、前記要求駆動出力取得手段は、前記要求駆動出力のうち、前記車両の初回始動時から終了時までの一走行区間における最大の要求駆動出力を記憶し(例えば、実施形態におけるステップS105)、前記一走行区間の終了時に前記最大の要求駆動出力を前記要求駆動出力情報蓄積部へ送信し(例えば、実施形態におけるステップS108)、前記駆動出力情報蓄積部は、送信された前記最大の要求駆動出力を所定の要求駆動出力の範囲毎に分類分けを行い(例えば、実施形態におけるステップS112〜S117)、前記分類分けにより得られたデータに基づいて、最も頻度の高い前記要求駆動出力の範囲値を、前記EV走行モード許容上限駆動出力決定手段に送信し(例えば、実施形態におけるステップS118、S119)、前記制御装置は、送信された前記範囲値を前記EV走行モードの許容上限駆動出力として自動的に設定するオートモード(例えば、実施形態におけるステップS096)を選択可能であり、前記EV走行モードの許容上限駆動出力は、前記一走行区間における前記蓄電装置の許容上限駆動出力であり、前記許容上限駆動出力に基づいて前記蓄電装置の許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離が設定され(例えば、実施形態におけるステップS094)、前記エンジン運転モードでは、要求駆動出力が前記EV走行モードの許容上限駆動出力を超えた場合(例えば、実施形態におけるステップS033)のほか、前記蓄電装置の前記許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離を超えた場合(例えば、実施形態におけるステップS040)にも前記エンジンを運転させ、前記許容上限駆動出力と、前記許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離とは、互いに反比例の関係に設定されることを特徴とする。
In order to solve the above-mentioned problem, the invention according to claim 1 transfers power to and from an engine (for example, engine E in the embodiment), a motor (for example, first motor M1 in the embodiment), and the motor. A hybrid vehicle control device (e.g., the
請求項2に係る発明は、前記制御装置は、前記オートモードの他に、前記EV走行モードの許容上限駆動出力を人為入力に基づいて設定するマニュアルモード(例えば、実施形態におけるステップS071〜S080)を選択可能であることを特徴とする。
In the invention according to
請求項3に係る発明は、前記最大の要求駆動出力は、前記車両の初回始動時にゼロに設定される(例えば、実施形態におけるステップS103)ことを特徴とする。
The invention according to
請求項4に係る発明は、前記車両は、ジェネレータ(例えば、実施形態における第2のモータM2)をさらに備え、前記エンジン運転モードは、前記エンジンを駆動させることで前記ジェネレータを発電させて前記モータで走行するシリーズ走行モード(例えば、実施形態におけるCHARGE EVモードおよびE−PASS EVモード)を含むことを特徴とする。 According to a fourth aspect of the present invention, the vehicle further includes a generator (for example, the second motor M2 in the embodiment), and in the engine operation mode, the motor is driven to generate the generator to generate electric power. Including a series travel mode (for example, CHAREV EV mode and E-PASS EV mode in the embodiment).
請求項5に係る発明は、前記蓄電装置の残容量を算出する残容量算出手段(例えば、実施形態におけるステップS037)を備え、前記蓄電装置は、前記ジェネレータとも電力の授受を行い、前記シリーズ走行モードは、前記ジェネレータで発電した電気の一部を前記モータへ送り、残部を前記蓄電装置に充電させて走行するチャージモード(例えば、実施形態におけるCHARGE EVモード)と、前記ジェネレータで発電した電気の全部を直接前記モータへ送って走行する電気パス運転モード(例えば、実施形態におけるE−PASS EVモード)と、を備えており、前記残容量が所定値より小さい場合、前記チャージモードを選択し、前記残容量が所定値以上の場合、前記電気パス運転モードを選択することを特徴とする。
The invention according to
請求項6に係る発明は、前記駆動出力情報蓄積部は、外部情報収集端末(例えば、実施形態における情報センター)であることを特徴とする。 The invention according to claim 6 is characterized in that the drive output information storage unit is an external information collection terminal (for example, an information center in the embodiment).
請求項7に係る発明は、前記車両は、外部電源から前記蓄電装置を充電可能なプラグインハイブリッド車両(例えば、実施形態におけるハイブリッド車両50)であることを特徴とする。
The invention according to claim 7 is characterized in that the vehicle is a plug-in hybrid vehicle (for example,
請求項1に係る発明によれば、ドライバーの運転による要求駆動出力の最大値を一走行区間ごとに記憶し、頻度が最大となる要求駆動出力をEV走行モードの許容上限駆動出力として自動的に設定するため、ドライバーの運転による要求駆動出力の大部分をEV走行モードで賄って、蓄電装置のエネルギーを有効活用することが可能になる。これにより、燃費と走行性能を確保することができる。 According to the first aspect of the present invention, the maximum value of the required drive output by the driving of the driver is stored for each travel section, and the required drive output having the maximum frequency is automatically set as the allowable upper limit drive output of the EV travel mode. Therefore, most of the required drive output by the driver's driving can be covered by the EV traveling mode, and the energy of the power storage device can be used effectively. Thereby, fuel consumption and running performance can be secured.
またエンジン運転モードでは、要求駆動出力がEV走行モードの許容上限駆動出力を超えた場合のほか、蓄電装置の許容上限積算時間、上限放電エネルギー量または許容上限積算走行距離を超えた場合に前記エンジンを運転させるので、蓄電装置の過放電を防止することができる。 In the engine operation mode, when the required drive output exceeds the allowable upper limit drive output of the EV travel mode, the engine is operated when the allowable upper limit integrated time, the upper limit discharge energy amount or the allowable upper limit integrated travel distance of the power storage device is exceeded. Since the battery is operated , overdischarge of the power storage device can be prevented.
また許容上限駆動出力と、許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離とは、互いに反比例の関係に設定されるので、蓄電装置の過放電を防止するとともに、ドライバーの特性に応じて許容上限駆動出力および許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離を最適に設定することが可能になり、燃費と走行性能を確保することができる。 In addition, the allowable upper limit drive output, the allowable upper limit integrated time, the allowable upper limit discharge energy amount, or the allowable upper limit integrated travel distance are set in an inversely proportional relationship with each other. Accordingly, the allowable upper limit drive output and the allowable upper limit integrated time, the allowable upper limit discharge energy amount or the allowable upper limit integrated travel distance can be set optimally, and fuel consumption and travel performance can be ensured.
請求項2に係る発明によれば、運転状況の変化に応じて許容上限駆動出力を設定することが可能になり、燃費と走行性能を確保することができる。 According to the second aspect of the present invention, it is possible to set the allowable upper limit drive output according to changes in the driving situation, and to ensure fuel consumption and driving performance.
請求項3に係る発明によれば、一走行区間ごとに要求駆動出力の最大値を正確に算出することができる。
According to the invention which concerns on
請求項4に係る発明によれば、蓄電装置の残容量が少ない場合でもモータで走行することが可能になる。
According to the invention which concerns on
請求項5に係る発明によれば、蓄電装置の残容量に応じてエンジンの出力を決定することが可能になり、無駄なエンジン駆動を防止することができる。したがって、燃費を向上させることができる。
According to the invention which concerns on
請求項6に係る発明によれば、外部情報収集端末が要求駆動出力のデータを蓄積することで、車両内にデータを蓄積する場合と比べて、保存や統計処理等の負担を軽減することができる。 According to the sixth aspect of the invention, the external information collection terminal accumulates the data of the required drive output, so that the burden of storage, statistical processing, etc. can be reduced as compared with the case of accumulating data in the vehicle. it can.
請求項7に係る発明によれば、プラグインハイブリッド車両においてEV走行機会を拡大することが可能になり、燃費を向上させることができる。 According to the invention which concerns on Claim 7 , it becomes possible to expand EV driving | running | working opportunity in a plug-in hybrid vehicle, and can improve a fuel consumption.
次に、この発明の実施形態を図面に基づいて説明する。
(ハイブリッド車両)
図1はこの発明の実施形態に係るハイブリッド車両を示している。このハイブリッド車両は、第1のモータM1によるモータ単独走行を可能とする車両である。また、エンジンEのクランクシャフトに第2のモータM2が連結され、この第2のモータM2にクラッチCを介して変速ギヤGが接続されたものである。
変速ギヤGは、例えば5速ギヤであって、ファイナルギヤ及び左右の駆動輪(前輪あるいは後輪)W,W間で駆動力を配分するディファレンシャルDを介して車両の駆動輪W,Wに駆動力を伝達する。また、第1のモータM1はファイナルギヤに連係され、ここからディファレンシャルDを介して車両の駆動輪W,Wに動力を伝達する。
Next, embodiments of the present invention will be described with reference to the drawings.
(Hybrid vehicle)
FIG. 1 shows a hybrid vehicle according to an embodiment of the present invention. This hybrid vehicle is a vehicle that allows the motor to travel independently by the first motor M1. A second motor M2 is connected to the crankshaft of the engine E, and a transmission gear G is connected to the second motor M2 via a clutch C.
The transmission gear G is, for example, a 5-speed gear, and is driven to the driving wheels W and W of the vehicle via a differential D that distributes driving force between the final gear and the left and right driving wheels (front wheels or rear wheels) W and W. Transmit power. The first motor M1 is linked to a final gear, and transmits power to the drive wheels W, W of the vehicle via the differential D from here.
第1のモータM1、第2のモータM2には、例えば3相のDCブラシレスモータが用いられ各々パワードライブユニットPDUに接続されている。各パワードライブユニットPDUには、第1のモータM1,第2のモータM2と電気エネルギーの授受を行う高圧系のリチウムイオン(Li−ion)型のバッテリLBが接続されている。バッテリLBはバッテリチャージャ30を備えている。このバッテリチャージャ30は、家庭用コンセントにプラグ31を差し込んでバッテリLBを充電可能とするものである。すなわち、本実施形態のハイブリッド車両は、プラグインタイプのハイブリッド車両となっている。
For example, a three-phase DC brushless motor is used as the first motor M1 and the second motor M2, and each is connected to the power drive unit PDU. Each power drive unit PDU is connected to a high-voltage lithium-ion (Li-ion) type battery LB that exchanges electric energy with the first motor M1 and the second motor M2. The battery LB includes a
そして、以下に述べる制御では具体的には第1のモータM1、第2のモータM2ともモータとして効率の最も良いとされる3000rpm付近を中心に使用できる範囲が互いに重なり合うように両者が設定され、この重なり合う範囲を中心にして運転されるよう、主として車速VPに応じて使用されるモータが選択されるようになっている。つまり、第1のモータM1は車速が低い領域で効率が高く、第2のモータM2は車速が高い領域で効率が高くなるように構成されている。 In the control described below, specifically, both the first motor M1 and the second motor M2 are set so that the ranges that can be used around 3000 rpm, which is considered to be the most efficient motor, overlap each other, A motor that is mainly used according to the vehicle speed VP is selected so that the vehicle is driven around the overlapping range. That is, the first motor M1 is configured to have high efficiency in a region where the vehicle speed is low, and the second motor M2 is configured to have high efficiency in a region where the vehicle speed is high.
また燃料消費量を少なくするには、できるだけエンジンEを運転することなく、バッテリLBから第1のモータM1に電力を供給してEV走行することが望ましい。ただし、バッテリLBのエネルギー容量には限界があるため、放電出力および放電時間を無限に大きくすることはできない。そこで制御部1は、放電出力および放電時間(h)、放電エネルギー量(Wh)または走行距離(km)(以下、「放電時間等」という。)が所定値以下の場合にはEV走行し、所定値を超えた場合にはエンジンを運転するように、各部を制御する。本実施形態では、放電出力および放電時間等の所定値が運転者の特性に合わせて設定され、EV走行の機会を多くして燃料消費量を低減しうるようになっている。
In order to reduce the amount of fuel consumption, it is desirable to drive the EV by supplying power from the battery LB to the first motor M1 without operating the engine E as much as possible. However, since the energy capacity of the battery LB is limited, the discharge output and the discharge time cannot be increased indefinitely. Therefore, the
各モータM1,M2の駆動及び回生作動は、制御部1からの制御指令を受けて各パワードライブユニットPDUにより行われる。すなわち、第1のモータM1を例にすると、パワードライブユニットPDUは、第1のモータM1の駆動時には、制御部1から出力されるトルク指令に基づき、バッテリLBから出力される直流電力を3相交流電力に変換して第1のモータM1へ供給する。一方、第1のモータM1の回生動作時には、第1のモータM1から出力される3相交流電力を直流電力に変換してバッテリLBを充電する。
The drive and regenerative operation of each motor M1, M2 is performed by each power drive unit PDU in response to a control command from the
12V消費系としての各種補機類を駆動するための12ボルトの補助バッテリ12VBATTは、DC−DCコンバータからなるコンバータDVを介して、各パワードライブユニットPDU及びバッテリLBに対して並列に接続されている。制御部1により制御されるコンバータDVは、各パワードライブユニットPDUまたはバッテリLBの電圧を降圧して補助バッテリ12VBATTを充電する。
A 12-volt auxiliary battery 12VBATT for driving various auxiliary machines as a 12V consumption system is connected in parallel to each power drive unit PDU and battery LB via a converter DV comprising a DC-DC converter. . Converter DV controlled by
ハイブリッド車両はエアコンユニット29を備えている。またエアコンユニット29を駆動するための電動コンプレッサ28を備え、さらに電動コンプレッサ28に3相交流電力を供給するためのエアコンインバータ27を備えている。エアコンインバータ27はバッテリLBに対して並列に接続され、バッテリLBからエアコンインバータに供給される電力量は制御部1によって制御されるようになっている。
The hybrid vehicle includes an
制御部1には、例えば、車両の速度(車速)VPを検出する車速センサからの検出信号と、エンジン水温TWを検出するエンジン水温センサ、触媒温度CAT温を検出する触媒温度検出センサ、およびエンジン回転数NEを検出するエンジン回転数センサからの検出信号と、前進Fや後退R、パーキングP、ニュートラルN等の各ポジションを検出するシフトポジションセンサからの検出信号と、ブレーキペダルBRの操作状態を検出するブレーキスイッチからの検出信号と、アクセルペダルの操作量に係るアクセルペダル開度APを検出するアクセルペダル開度センサからの検出信号と、スロットル開度THを検出するスロットル開度センサからの検出信号と、吸気管負圧PBを検出する吸気管負圧センサからの検出信号と、バッテリLBの温度TBATを検出するバッテリ温度センサからの検出信号等が入力されている。
The
制御部1は、第1のモータM1の駆動及び回生作動をパワードライブユニットPDUを介して制御するMOT1ECU21と、第2のモータM2の駆動及び回生作動をパワードライブユニットPDUを介して制御するMOT2ECU22と、ブレーキデバイスを駆動制御して車両の挙動を安定化させるBRAKEECU23と、例えばパワードライブユニットPDUやバッテリLB、コンバータDV、第1のモータM1、第2のモータM2等からなる高圧電装系の監視及び保護、およびパワードライブユニットPDU及びコンバータDVの動作制御を行うMG/BATECU24と、エンジンEへの燃料供給や点火タイミング等を制御するFIECU25とを備え、各ECU21〜25は相互に通信可能に接続されている。また、各ECU21〜25は各種の状態量を表示する計器類からなるメータ26に接続されている。
The
(運転モード)
次に、図2〜図12に基づいて運転モードについて説明する。
ここで、このハイブリッド車両はクラッチCが接続(ON)状態(ロックアップ状態)のモードと、クラッチCが遮断(OFF)状態のモードとで大きく2つの運転モードに分かれる。
(Operation mode)
Next, the operation mode will be described with reference to FIGS.
Here, the hybrid vehicle is roughly divided into two operation modes, a mode in which the clutch C is in the connected (ON) state (lock-up state) and a mode in which the clutch C is in the disconnected (OFF) state.
そして、更に、このクラッチCの状態に加えて、エンジンEが運転状態か停止状態か、第1のモータM1が駆動状態か発電(回生)状態か発電状態か停止状態か回転(0トルク)状態か、第2のモータM2が駆動状態か発電状態か停止状態か回転(0トルク)状態か、バッテリLBが放電状態か充電状態か、充放電状態の何れでもないバッテリ端0状態かにより複数の運転モードに分かれる。
Further, in addition to the state of the clutch C, the engine E is in an operating state or a stopped state, and the first motor M1 is in a driving state, a power generation (regeneration) state, a power generation state, a stop state, or a rotation (0 torque) state. Depending on whether the second motor M2 is in a driving state, a power generation state, a stopped state, a rotation (0 torque) state, a battery LB is in a discharging state, a charging state, or a
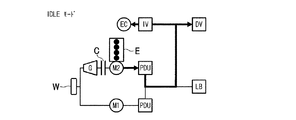
図2はSTART(初期始動)モードを示している。この運転モードは、クラッチCは遮断、エンジンEは停止、第1のモータM1は停止、第2のモータM2は駆動、バッテリLBは放電となっている。つまり、全く車両が動いていない場合のエンジンEの始動であって、イグニッションキーをONにして始動する場合に、バッテリLBから電力を供給し第2のモータM2を駆動してエンジンEを始動すると共に、コンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。 FIG. 2 shows a START (initial start) mode. In this operation mode, the clutch C is disconnected, the engine E is stopped, the first motor M1 is stopped, the second motor M2 is driven, and the battery LB is discharged. That is, when the engine E is started when the vehicle is not moving at all and the engine is started with the ignition key turned ON, power is supplied from the battery LB and the second motor M2 is driven to start the engine E. At the same time, power is supplied to the 12V consumption system and the auxiliary battery 12VBATT via the converter DV.
図3はSTART(EV始動)モードを示している。この運転モードは、クラッチCは遮断、エンジンEは停止、第1のモータM1は駆動、第2のモータM2は駆動、バッテリLBは放電となっている。つまり、クラッチCを遮断し、エンジンEを停止して第1のモータM1で走行している場合に、バッテリLBの電力で第2のモータM2を駆動してエンジンEを始動すると共にコンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。 FIG. 3 shows a START (EV start) mode. In this operation mode, the clutch C is disconnected, the engine E is stopped, the first motor M1 is driven, the second motor M2 is driven, and the battery LB is discharged. That is, when the clutch C is disconnected, the engine E is stopped and the first motor M1 is running, the second motor M2 is driven by the power of the battery LB to start the engine E and the converter DV. Power is supplied to the 12V consumption system and the auxiliary battery 12VBATT.
図4はE−PASS(電気パス)EVモードを示している。この運転モードは、クラッチCは遮断、エンジンEは運転、第1のモータM1は駆動、第2のモータM2は発電、バッテリLBはバッテリ端0となっている。つまり、第2のモータM2の発電エネルギーで第1のモータM1を駆動してシリーズ走行すると共に、コンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。またエアコンインバータIVを介して電動コンプレッサECに電力を供給する。E−PASS EVモードは、エンジン運転モードの一種であり、第1のモータM1が関与するシリーズ走行モードである。
ここで、シフトポジションセンサによりリバースが検出された場合には、第1のモータM1を逆回転させることで、車両が後退するE−PASS EV REVERSEモードとなる。
FIG. 4 shows an E-PASS (electric path) EV mode. In this operation mode, the clutch C is disengaged, the engine E is operated, the first motor M1 is driven, the second motor M2 is generating, and the battery LB is at the
Here, when reverse is detected by the shift position sensor, the first motor M1 is reversely rotated to enter the E-PASS EV REVERSE mode in which the vehicle moves backward.
図5はBATT EVモードを示している。この運転モードは、クラッチCは遮断、エンジンEは停止、第1のモータM1は駆動、第2のモータM2は停止、バッテリLBは放電となっている。つまり、発電の効率が悪い場合などにおいて用いられ、バッテリLBの電力のみで第1モータM1を駆動して走行する。本実施形態では、BATT EVモードによる走行機会が(上述したE−PASS EVモードおよび後述するCHARGE EVモードに比べて)できるだけ多くなるように、運転者の特性に合わせて制御を行う。
ここで、シフトポジションセンサによりリバースが検出された場合に、第1のモータM1が逆回転すると、車両が後退するBATT EV REVERSEモードとなる。
FIG. 5 shows the BATT EV mode. In this operation mode, the clutch C is disconnected, the engine E is stopped, the first motor M1 is driven, the second motor M2 is stopped, and the battery LB is discharged. That is, it is used when the efficiency of power generation is poor, and the first motor M1 is driven only by the power of the battery LB to travel. In the present embodiment, control is performed in accordance with the characteristics of the driver so that the driving opportunities in the BATT EV mode are as large as possible (compared to the above-described E-PASS EV mode and CHARGE EV mode described later).
Here, when reverse is detected by the shift position sensor, when the first motor M1 rotates in reverse, the vehicle enters the BATT EV REVERSE mode in which the vehicle moves backward.
図6はS−REGENモードを示している。この運転モードは、クラッチCは遮断、エンジンEは停止、第1のモータM1は発電(回生)、第2のモータM2は停止、バッテリLBは充電となっている。つまり、減速回生時に第1のモータM1により回生を行い、バッテリLBを充電するとともに、コンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。またエアコンインバータIVを介して電動コンプレッサECに電力を供給する。このS−REGENモードでは、エンジンEや第2のモータM2による抵抗をなくし、できる限り回生量を増やすことができる。尚、「S」はシリーズの略称であり第1のモータM1が関与していることを示している。 FIG. 6 shows the S-REGEN mode. In this operation mode, the clutch C is disconnected, the engine E is stopped, the first motor M1 is generating power (regeneration), the second motor M2 is stopped, and the battery LB is charged. That is, regeneration is performed by the first motor M1 during deceleration regeneration, the battery LB is charged, and power is supplied to the 12V consumption system and the auxiliary battery 12VBATT via the converter DV. Electric power is supplied to the electric compressor EC via the air conditioner inverter IV. In the S-REGEN mode, the resistance by the engine E and the second motor M2 can be eliminated, and the regeneration amount can be increased as much as possible. “S” is an abbreviation for the series and indicates that the first motor M1 is involved.
図7はCHARGE EVモードを示している。この運転モードは、クラッチCは遮断、エンジンEは運転、第1のモータM1は駆動、第2のモータM2は発電、バッテリLBは充電となっている。つまり、第2のモータM2で発電することにより、第1のモータM1で走行するための電力に加えて、バッテリLBへの充電分及びコンバータDVを介して12V消費系や補助バッテリ12VBATTに供給する電力を確保している。またエアコンインバータIVを介して電動コンプレッサECに電力を供給する。このCHARGE EVモードは、エンジン運転モードの一種である。なお一番燃費効率の良い領域でエンジンを駆動し、モータ駆動分以外の余剰電力をバッテリLBに充電することも可能である。
なおバッテリLBとパワードライブユニットPDUとの間に、下り方向(LBからPDUへの方向)の電流のみを通過させるトランジスタスイッチと、上り方向(PDUからLBへの方向)の電流のみを通過させるトランジスタスイッチとを、並列に接続してもよい。この場合、E−PASS EVモードでは両方のスイッチを切断し、BATT EVモードでは上り方向のスイッチのみを切断し、CHARGE EVモードでは下り方向のスイッチのみを切断することで対応する。
FIG. 7 shows the CHARGE EV mode. In this operation mode, the clutch C is disconnected, the engine E is operated, the first motor M1 is driven, the second motor M2 is generating power, and the battery LB is charged. That is, by generating electric power with the second motor M2, in addition to the electric power for running with the first motor M1, it is supplied to the 12V consumption system and the auxiliary battery 12VBATT via the charge to the battery LB and the converter DV. Electricity is secured. Electric power is supplied to the electric compressor EC via the air conditioner inverter IV. This CHARGE EV mode is a kind of engine operation mode. It is also possible to drive the engine in a region with the highest fuel efficiency and charge the battery LB with surplus power other than the motor drive.
A transistor switch that allows only current in the downstream direction (direction from LB to PDU) and a transistor switch that allows only current in the upward direction (direction from PDU to LB) to pass between battery LB and power drive unit PDU. May be connected in parallel. In this case, both switches are disconnected in the E-PASS EV mode, only the upstream switch is disconnected in the BATT EV mode, and only the downstream switch is disconnected in the CHARGE EV mode.
図8はIDLE停止モード(NO LOAD CHARGEモード)を示している。この運転モードは、クラッチCは遮断、エンジンEは停止、第1のモータM1は停止、第2のモータM2は停止、バッテリLBは放電となっている。つまりエンジンEを停止して、バッテリLBからの電力でコンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。またエアコンインバータIVを介して電動コンプレッサECに電力を供給する。 FIG. 8 shows the IDLE stop mode (NO LOAD CHARGE mode). In this operation mode, the clutch C is disconnected, the engine E is stopped, the first motor M1 is stopped, the second motor M2 is stopped, and the battery LB is discharged. That is, the engine E is stopped, and power is supplied from the battery LB to the 12V consumption system and the auxiliary battery 12VBATT via the converter DV. Electric power is supplied to the electric compressor EC via the air conditioner inverter IV.
図9はIDLEモードを示している。この運転モードは、クラッチCは遮断、エンジンEは運転、第1のモータM1は停止、第2のモータM2は発電、バッテリLBはバッテリ端0となっている。つまり、エンジンを運転して第2のモータM2で発電し、コンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。またエアコンインバータIVを介して電動コンプレッサECに電力を供給する。
FIG. 9 shows the IDLE mode. In this operation mode, the clutch C is disconnected, the engine E is operated, the first motor M1 is stopped, the second motor M2 is generating power, and the battery LB is at the
図10はロックアップモードを示している。この運転モードは、クラッチCは接続、エンジンEは運転、第1のモータM1は回転(0トルク)、第2のモータM2は発電、バッテリLBはバッテリ端0となっている。つまりエンジンを運転して、車両を駆動するとともに、第2のモータM2で発電しコンバータDVを介して12V消費系や補助バッテリ12VBATTに電力を供給する。またエアコンインバータIVを介して電動コンプレッサECに電力を供給する。
FIG. 10 shows the lock-up mode. In this operation mode, the clutch C is connected, the engine E is operated, the first motor M1 is rotating (0 torque), the second motor M2 is generating power, and the battery LB is
図11はロックアップP−ASSISTモードを示している。この運転モードは、クラッチCは接続、エンジンEは運転、第1のモータM1は回転(0トルク)、第2のモータM2は駆動、バッテリLBは放電となっている。つまり、ロックアップモードで走行中に負荷が少し大きくなると、バッテリLBからの電力で第2のモータM2を運転し、エンジンEを駆動補助((ASSIST)アシスト)する。尚、「P」はパラレルの略称であり第2のモータM2が関与していることを示している。 FIG. 11 shows the lockup P-ASSIST mode. In this operation mode, the clutch C is connected, the engine E is operated, the first motor M1 is rotated (0 torque), the second motor M2 is driven, and the battery LB is discharged. That is, when the load becomes slightly larger during traveling in the lock-up mode, the second motor M2 is operated with the electric power from the battery LB, and the drive of the engine E (ASSIST) assists. “P” is an abbreviation for parallel and indicates that the second motor M2 is involved.
図12はロックアップS−ASSISTモードを示している。この運転モードは、クラッチCは接続、エンジンEは運転、第1のモータM1は駆動、第2のモータM2は回転(0トルク)、バッテリLBは放電となっている。つまり、ロックアップモードで走行中に負荷が大きくなると、バッテリLBからの電力で第1のモータM1を駆動してエンジンEを駆動補助すると共に、バッテリLBからの電力をコンバータDVを介して12V消費系及び補助バッテリ12VBATTに供給する。
本実施形態では、第2のモータM2の効率が第1のモータM1の効率を上回る場合にロックアップP−ASSISTモードで走行し、第1のモータM1の効率が第2のモータM2の効率を上回る場合にロックアップS−ASSISTモードで走行する。
FIG. 12 shows the lockup S-ASSIST mode. In this operation mode, the clutch C is connected, the engine E is operated, the first motor M1 is driven, the second motor M2 is rotated (0 torque), and the battery LB is discharged. That is, when the load increases during traveling in the lock-up mode, the first motor M1 is driven by the electric power from the battery LB to assist driving the engine E, and the electric power from the battery LB is consumed by 12V via the converter DV. Supply to system and auxiliary battery 12VBATT.
In the present embodiment, when the efficiency of the second motor M2 exceeds the efficiency of the first motor M1, the vehicle travels in the lock-up P-ASSIST mode, and the efficiency of the first motor M1 exceeds the efficiency of the second motor M2. If it exceeds, run in lock-up S-ASSIST mode.
(フローチャート)
次に、図13、図14に示すフローチャートに基づいて、運転モードを判別するオペレーション決定処理について説明する。
まず、ステップS001においてR(リバース)ポジションか否かを判定する。ステップS001における判定結果が「YES」である場合にはステップS013に進み、「NO」である場合にはステップS002に進む。
ステップS013においては、車速VPとアクセルペダル開度APから要求駆動力(後進側)FREQRをマップ検索し、ステップS014で車速VPと要求駆動力(後進側)FREQRから要求駆動出力PREQを算出して、ステップS015に進む。
ステップS015ではバッテリLBの残容量SOCにより、BATT EVモードの許容上限駆動用出力PREQLMTをテーブル検索する。
(flowchart)
Next, the operation determination process for determining the operation mode will be described based on the flowcharts shown in FIGS.
First, in step S001, it is determined whether or not the R (reverse) position. If the determination result in step S001 is “YES”, the process proceeds to step S013, and if “NO”, the process proceeds to step S002.
In step S013, the required driving force (reverse side) FREQR is searched from the vehicle speed VP and the accelerator pedal opening AP, and in step S014, the required driving output PREQ is calculated from the vehicle speed VP and the required driving force (reverse side) FREQR. The process proceeds to step S015.
In step S015, the table is searched for the allowable upper limit drive output PREQLMT in the BATT EV mode based on the remaining capacity SOC of the battery LB.
ステップS016において要求駆動出力PREQがBATT EVモードの許容上限駆動用出力PREQLMTよりも大きいか否かを判定する。ステップS016における判定結果が「YES」である場合にはステップS019に進み、「NO」である場合にはステップS017に進む。ステップS019では図4に示すE−PASS EV REVERSEモードとなり処理を終了する。バッテリLBからは電力を得られないためエンジンEにより要求駆動出力を得ることが必要だからである。 In step S016, it is determined whether or not the required drive output PREQ is larger than the allowable upper limit drive output PREQLMT in the BATT EV mode. If the determination result in step S016 is “YES”, the process proceeds to step S019, and if “NO”, the process proceeds to step S017. In step S019, the mode is changed to the E-PASS EV REVERSE mode shown in FIG. This is because it is necessary to obtain the required drive output from the engine E because electric power cannot be obtained from the battery LB.
ステップS017においてエンジン水温TWがBATT EV走行実施下限エンジン水温TWEVよりも大きいか否かを判定する。ステップS017における判定結果が「YES」である場合にはステップS018に進み、「NO」である場合にはステップS019に進む。エンジン水温TWが低いときにはエンジンEを始動する必要があるからである。
尚、BATT EV走行実施下限エンジン水温TWEVは後述するアイドル停止実施下限エンジン水温と同様の値である。
In step S017, it is determined whether or not the engine water temperature TW is higher than the BATT EV travel execution lower limit engine water temperature TWEV. If the determination result in step S017 is “YES”, the process proceeds to step S018, and if “NO”, the process proceeds to step S019. This is because it is necessary to start the engine E when the engine water temperature TW is low.
The BATT EV travel execution lower limit engine water temperature TWEV is the same value as the idle stop execution lower limit engine water temperature described later.
ステップS018ではCAT温(触媒温度)がBATT EV走行実施下限触媒温度TCATEVよりも大きいか否かを判定する。ステップS018における判定結果が「YES」である場合にはステップS020に進み、「NO」である場合にはステップS019に進む。CAT温(触媒温度)が低いときにはエンジンEを始動する必要があるからである。ステップS020では図5に示すBATT EV REVERSEモードとなり処理を終了する。尚、BATT EV走行実施下限触媒温度TCATEVは後述するアイドル停止実施下限触媒温度と同様の値である。 In step S018, it is determined whether or not the CAT temperature (catalyst temperature) is higher than the BATT EV travel execution lower limit catalyst temperature TCATEV. If the determination result in step S018 is “YES”, the process proceeds to step S020, and if “NO”, the process proceeds to step S019. This is because it is necessary to start the engine E when the CAT temperature (catalyst temperature) is low. In step S020, the BATT EV REVERSE mode shown in FIG. 5 is entered and the process ends. The BATT EV travel execution lower limit catalyst temperature TCATEV is the same value as the idle stop execution lower limit catalyst temperature described later.
一方、S001の判定結果が「NO」である(Rポジションではない)場合には、ステップS002においてシフトポジションがPやNであるか否かを判定する。ステップS002における判定結果が「YES」である場合にはステップS021に進み、「NO」である場合にはステップS003に進む。ステップS021においてはバッテリLBの残容量SOCがアイドル停止実施下限残容量SOCIDLEよりも大きいか否かを判定する。バッテリLBの残容量SOCがアイドル停止後の再起動をする余裕があるか否かを判定するためである。ステップS021における判定結果が「YES」である場合にはステップS022に進み、「NO」である場合にはステップS024に進む。 On the other hand, if the determination result in S001 is “NO” (not the R position), it is determined in step S002 whether the shift position is P or N. If the determination result in step S002 is “YES”, the process proceeds to step S021, and if “NO”, the process proceeds to step S003. In step S021, it is determined whether or not the remaining capacity SOC of the battery LB is larger than the idle stop execution lower limit remaining capacity SOCIDLE. This is for determining whether or not the remaining capacity SOC of the battery LB has a margin for restart after the idle stop. If the determination result in step S021 is “YES”, the process proceeds to step S022, and if “NO”, the process proceeds to step S024.
ステップS022においてエンジン水温TWがアイドル停止実施下限エンジン水温TWEVよりも大きいか否かを判定する。ステップS022における判定結果が「YES」である場合にはステップS023に進み、「NO」である場合にはステップS024に進む。ステップS024では図9に示すようにIDLEモードとなり処理を終了する。
ステップS023ではCAT温(触媒温度)がアイドル停止実施下限触媒温度TCATEVよりも大きいか否かを判定する。ステップS023における判定結果が「YES」である場合にはステップS025に進み、「NO」である場合にはステップS024に進む。ステップS025では図8に示すIDLE停止モードとなり処理を終了する。
In step S022, it is determined whether the engine water temperature TW is higher than the idle stop execution lower limit engine water temperature TWEV. If the determination result in step S022 is "YES", the process proceeds to step S023, and if "NO", the process proceeds to step S024. In step S024, the IDLE mode is set as shown in FIG.
In step S023, it is determined whether or not the CAT temperature (catalyst temperature) is higher than the idle stop execution lower limit catalyst temperature TCATEV. If the determination result in step S023 is “YES”, the process proceeds to step S025, and if “NO”, the process proceeds to step S024. In step S025, the IDLE stop mode shown in FIG. 8 is entered and the process is terminated.
一方、S002の判定結果が「NO」である(PまたはNポジションではない)場合には、ステップS003においてBRAKE ON(ブレーキ操作があった)か否かを判定する。ステップS003における判定結果が「YES」である場合にはステップS004に進み、「NO」である場合にはステップS005に進む。ステップS004においてVP(車速)=0か否かを判定する。ステップS004における判定結果が「YES」である場合には車両が停止しているためステップS021に進み、「NO」である場合には走行中であるためステップS005に進む。 On the other hand, if the determination result in S002 is “NO” (not the P or N position), it is determined in step S003 whether BRAKE ON (there is a brake operation). If the determination result in step S003 is “YES”, the process proceeds to step S004, and if “NO”, the process proceeds to step S005. In step S004, it is determined whether VP (vehicle speed) = 0. If the determination result in step S004 is “YES”, the vehicle is stopped and the process proceeds to step S021, and if “NO”, the vehicle is traveling and the process proceeds to step S005.
ステップS005においては、車速VPとアクセルペダル開度APから要求駆動力(前進側)FREQFをマップ検索し、ステップS006で車速VPと要求駆動力(前進側)FREQFから要求駆動出力PREQを算出して、ステップS007に進む。
ステップS007では要求駆動力(前進側)FREQFがゼロより小さいか否かを判定する。ステップS007における判定結果が「YES」である場合(減速中)にはステップS026に進み、「NO」である場合にはステップS008に進む。
In step S005, a map search is made for the required driving force (forward movement side) FREQF from the vehicle speed VP and the accelerator pedal opening AP, and in step S006, a required driving output PREQ is calculated from the vehicle speed VP and the required driving force (forward movement side) FREQF. The process proceeds to step S007.
In step S007, it is determined whether or not the required driving force (forward movement side) FREQF is smaller than zero. If the determination result in step S007 is “YES” (deceleration), the process proceeds to step S026, and if “NO”, the process proceeds to step S008.
ステップS026においてVP(車速)が、クラッチCが締結できるロックアップクラッチ締結下限車速VPLCよりも大きいか否かを判定する。ステップS026における判定結果が「YES」である場合(ロックアップが可能な車速)にはステップS027に進み、「NO」である場合(ロックアップできない車速)にはステップS029に進む。ステップS029では図6に示すS−REGENモードとなり処理を終了する。 In step S026, it is determined whether or not VP (vehicle speed) is higher than a lockup clutch engagement lower limit vehicle speed VPLC at which the clutch C can be engaged. If the determination result in step S026 is “YES” (vehicle speed that can be locked up), the process proceeds to step S027, and if “NO” (vehicle speed that cannot be locked up), the process proceeds to step S029. In step S029, the S-REGEN mode shown in FIG.
ステップS027においてロックアップ中か否かを判定する。ステップS027における判定結果が「YES」である場合にはステップS028に進み、「NO」である場合にはステップS029に進む。この判定があるのはクラッチが遮断となっている高車速状態の場合には、ロックアップのためにエンジン回転数NEを持ち上げることの方がロスが多いので、そのままステップS029で図6に示すS−REGENモードとした方が良いからである。
ステップS028ではVP(車速)が減速時のロックアップクラッチ締結下限車速VPDECLCLよりも小さいか否かを判定する。
この判定は、モータの効率の観点から前述したように回生を第1のモータM1で行った方がよいか、第2のモータM2で行った方が良いかを判定するためである。
ステップS028における判定結果が「YES」である場合にはステップS030に進み、「NO」である場合にはステップS031に進む。ステップS030ではロックアップS−REGENモードとなり処理を終了する。第1のモータM1は回転数が低い(車速が小さい)ほど効率が良いからである。なおロックアップS−REGENモードは、図12に示すロックアップS−ASSISTモードと同じ構成である。一方、ステップS031ではロックアップP−REGENモードとなり処理を終了する。第2のモータM2は回転数が高い(車速が大きい)ほど効率が良いからである。なおロックアップP−REGENモードは、図11に示すロックアップP−ASSISTモードと同じ構成である。
In step S027, it is determined whether lock-up is in progress. If the determination result in step S027 is “YES”, the process proceeds to step S028, and if “NO”, the process proceeds to step S029. In the high vehicle speed state where the clutch is disengaged, there is more loss in raising the engine speed NE for lockup, so that this determination is made in step S029 as shown in FIG. This is because it is better to use the -REGEN mode.
In step S028, it is determined whether or not VP (vehicle speed) is smaller than a lockup clutch engagement lower limit vehicle speed VPDECCL during deceleration.
This determination is for determining whether it is better to perform the regeneration with the first motor M1 or the second motor M2 as described above from the viewpoint of the efficiency of the motor.
If the determination result in step S028 is “YES”, the process proceeds to step S030, and if “NO”, the process proceeds to step S031. In step S030, the lock-up S-REGEN mode is set and the process ends. This is because the first motor M1 is more efficient as the rotational speed is lower (the vehicle speed is lower). The lockup S-REGEN mode has the same configuration as the lockup S-ASSIST mode shown in FIG. On the other hand, in step S031, the lock-up P-REGEN mode is set and the process ends. This is because the second motor M2 is more efficient as the rotational speed is higher (the vehicle speed is higher). The lockup P-REGEN mode has the same configuration as the lockup P-ASSIST mode shown in FIG.
(ロックアップモード判断)
一方、ステップS007における判定結果が「NO」である(要求駆動力がゼロ以上である)場合には、ステップS008においてVP(車速)がロックアップクラッチ締結下限車速VPLCよりも大きいか否かを判定する。ロックアップは車速がある程度高くないとできないため、この判別を基準にして第1のモータM1による走行を行うか否か(ロックアップの可否)を判別するためである。ステップS008における判定結果が「YES」である場合にはステップS009に進み、「NO」である場合にはステップS032に進む。
ステップS009では車速VPとバッテリLBの残容量SOCにより、ロックアップクラッチ締結上限駆動力FLCPLTをマップ検索する。尚、このマップ検索は、図16に示す横軸、車速VP(km/h)と縦軸、駆動力(N)のマップに基づき、更にバッテリLBの残容量SOCを考慮して行われる。
(Lock-up mode judgment)
On the other hand, if the determination result in step S007 is “NO” (the required driving force is zero or more), it is determined in step S008 whether VP (vehicle speed) is greater than the lockup clutch engagement lower limit vehicle speed VPLC. To do. Since lockup cannot be performed unless the vehicle speed is high to some extent, it is for determining whether or not traveling by the first motor M1 is performed based on this determination (whether or not lockup is possible). If the determination result in step S008 is “YES”, the process proceeds to step S009, and if “NO”, the process proceeds to step S032.
In step S009, a map search is performed for the lockup clutch engagement upper limit driving force FLCPLT based on the vehicle speed VP and the remaining capacity SOC of the battery LB. This map search is performed in consideration of the remaining capacity SOC of the battery LB based on the horizontal axis, vehicle speed VP (km / h) and vertical axis, and driving force (N) map shown in FIG.
ここで、図16に示すように、駆動力の限界は、クラッチCの締結できるロックアップクラッチ締結下限車速VPLCよりも高車速領域で、上から順にクラッチCのロックアップできる限界であるロックアップクラッチ締結上限駆動力FLCPLT、エンジン駆動力の限界であるロックアップモード実施可能上限駆動力FCYL4となる。また、車速の限界は、ロックアップモード中の第1のモータM1のアシスト実施上限車速VPTMASTHを境にして、高速側では第2のモータM2によりアシストを行い、低速側では第1のモータM1によりアシストを行うようになっている。
つまり、その性質上エンジン回転数と同じ回転数で回転する第2のモータM2の方が第1のモータM1よりも使用される回転数が高いので、第1のモータM1を使用したのでは効率が低くなるような回転数を与える車速(ロックアップモード中の第1のモータM1のアシスト実施上限車速VPTMASTH)に達したら、それよりも高い車速では第2のモータM2を使用してアシストを行うことが、ロスが少ない点で有利であるからである。
Here, as shown in FIG. 16, the limit of the driving force is a lockup clutch that is a limit at which the clutch C can be locked in order from the top in a vehicle speed region higher than the lockup clutch engagement lower limit vehicle speed VPLC at which the clutch C can be engaged. The fastening upper limit driving force FLCPLT and the lockup mode executable upper limit driving force FCYL4, which is the limit of the engine driving force. Further, the vehicle speed is limited by the second motor M2 on the high speed side and the first motor M1 on the low speed side, with the assist execution upper limit vehicle speed VPMATTH of the first motor M1 in the lockup mode as a boundary. It is designed to assist.
In other words, the second motor M2 that rotates at the same rotational speed as the engine rotational speed has a higher rotational speed that is used than the first motor M1. Therefore, if the first motor M1 is used, the efficiency is increased. When the vehicle speed at which the rotational speed becomes low (the assisting upper limit vehicle speed VPMATTH of the first motor M1 in the lockup mode) is reached, the second motor M2 is used to assist at a higher vehicle speed. This is because it is advantageous in that there is little loss.
次に、ステップS010において要求駆動力(前進側)FREQFがロックアップクラッチ締結上限駆動力FLCPLTより小さいか否かを判定する。これより大きいとショックが出るためロックアップできないからである。ステップS010における判定結果が「YES」である場合にはステップS011に進み、「NO」である場合にはステップS032に進む。ステップS011ではロックアップパラレルモードとなり、ステップS012のロックアップパラレル内モード決定処理に移行して処理を終了する。 Next, in step S010, it is determined whether or not the required driving force (forward movement side) FREQF is smaller than the lockup clutch engagement upper limit driving force FLCPLT. This is because if it is larger than this, a shock will occur and lockup will not be possible. If the determination result in step S010 is “YES”, the process proceeds to step S011, and if “NO”, the process proceeds to step S032. In step S011, the lockup parallel mode is set, the process proceeds to the lockup parallel mode determination process in step S012, and the process ends.
図15に示すロックアップパラレル内モード決定処理では、まずS051において、車速VPによりロックアップモード実施可能上限駆動力FCYL4を図16に示すテーブルから検索する。次にS052において、要求駆動力FREQFがロックアップモード実施可能上限駆動力FCYL4より小さいか否かを判断する。ステップS052の判定結果が「YES」の場合には、ステップS053に進んでロックアップモードを実施する。ステップS052の判定結果が「NO」の場合にはステップS054に進み、車速VPが第1のモータM1のアシスト実施上限車速VPTMASTHより小さいか判断する。ステップS054の判定結果が「YES」の場合には、回転数が低いため第1のモータM1によるアシスト効率が高いことから、ステップS056に進んでロックアップS−ASSISTモードを実施する。ステップS054の判定結果が「NO」の場合には、回転数が高いため第2のモータM2によるアシスト効率が高いことから、ステップS055に進んでロックアップP−ASSISTモードを実施する。 In the lockup parallel intra-mode determination process shown in FIG. 15, first, in S051, the lockup mode executable upper limit driving force FCYL4 is searched from the table shown in FIG. 16 based on the vehicle speed VP. Next, in S052, it is determined whether or not the required driving force FREQF is smaller than the upper limit driving force FCYL4 that can be implemented in the lockup mode. If the determination result of step S052 is “YES”, the process proceeds to step S053 to implement the lockup mode. If the determination result of step S052 is “NO”, the process proceeds to step S054, and it is determined whether the vehicle speed VP is lower than the assist execution upper limit vehicle speed VPMATTH of the first motor M1. If the determination result in step S054 is “YES”, since the rotational speed is low and the assist efficiency by the first motor M1 is high, the process proceeds to step S056 to implement the lockup S-ASSIST mode. If the determination result in step S054 is “NO”, the rotational efficiency is high and the assist efficiency by the second motor M2 is high, so the process proceeds to step S055 and the lockup P-ASSIST mode is performed.
(EVモード判断)
図13に戻り、ステップS010の判断結果が「NO」の場合、すなわち要求駆動力(前進側)FREQFがロックアップクラッチ締結上限駆動力FLCPLTより大きい場合には、ロックアップモードが実施できないことから、S32に進んでEVモード判断を行う。EVモード判断では、BATT EVモードおよびエンジン運転モード(E−PASS EVモードまたはCHARGE EVモード)のいずれを実施するか判断する。
(EV mode judgment)
Returning to FIG. 13, when the determination result in step S010 is “NO”, that is, when the required driving force (forward side) FREQF is larger than the lockup clutch engagement upper limit driving force FLCPLT, the lockup mode cannot be performed. Proceeding to S32, EV mode determination is performed. In the EV mode determination, it is determined whether to execute the BATT EV mode or the engine operation mode (E-PASS EV mode or CHARGE EV mode).
図17はハイブリッド車両のエネルギマネージメントの概念図である。図17では、横軸にモード(または時間)をとり、縦軸にバッテリSOCをとっている。ハイブリッド車両のエネルギーマネージメントモードとして、充電消費モード(Charg−Depleting Mode:CDM)、充電維持モード(Charge−Sustaining Mode:CSM)および再充電モード(Re−Charge Mode)が挙げられる。CDMは、上述したBATT EVモードに対応するものであり、バッテリの通常使用領域における上限SOCから下限SOCまで放電を繰り返すモードである。CSMは、放電および充電を繰り返してSOCを略一定に維持するモードである。このCSMにおいて、減速回生のみでは充電量が不足する場合には、エンジンによりモータジェネレータを駆動して発電し充電量を確保する必要があり、燃料を消費することになる。したがって、燃費を向上させるには、できるだけCDMを多くすることが望ましい。 FIG. 17 is a conceptual diagram of energy management of a hybrid vehicle. In FIG. 17, the horizontal axis represents the mode (or time), and the vertical axis represents the battery SOC. Examples of the energy management mode of the hybrid vehicle include a charge-depletion mode (CDM), a charge-maintenance mode (CSM), and a recharge mode (Re-Charge Mode). The CDM corresponds to the BATT EV mode described above, and is a mode in which discharging is repeated from the upper limit SOC to the lower limit SOC in the normal use region of the battery. CSM is a mode in which the SOC is maintained substantially constant by repeatedly discharging and charging. In this CSM, when the charge amount is insufficient only by the deceleration regeneration, it is necessary to drive the motor generator by the engine to generate electric power to secure the charge amount, which consumes fuel. Therefore, it is desirable to increase the CDM as much as possible in order to improve fuel consumption.
車両に搭載可能なバッテリサイズには限界があり、これに伴ってバッテリ容量にも限界がある。そのため、要求駆動出力が低い場合にはバッテリ放電で対応し、要求駆動出力が高い場合にはエンジンを始動する手法が考えられる。ただしバッテリ容量は、放電出力と放電時間等との積に比例する。そのため、運転者の通勤路等の運転条件により高出力が短時間だけ必要な場合には、バッテリ放電のみで対応できる可能性がある。そこで本実施形態では、バッテリの放電許容モード(すなわち、BATT EVモードの適用範囲)を、運転者の運転条件に応じて、高出力かつ短時間から低出力かつ長時間まで変更できるように構成している。 There is a limit to the size of the battery that can be mounted on the vehicle, and accordingly, the battery capacity is also limited. Therefore, it is conceivable to use a battery discharge when the required drive output is low, and to start the engine when the required drive output is high. However, the battery capacity is proportional to the product of the discharge output and the discharge time. Therefore, when a high output is required only for a short time due to driving conditions such as a driver's commuting route, there is a possibility that it can be handled only by battery discharge. Therefore, in this embodiment, the battery discharge allowable mode (that is, the application range of the BATT EV mode) is configured to be able to change from a high output and a short time to a low output and a long time according to the driving conditions of the driver. ing.
図18(a)はバッテリ放電許容モードの概念図であり、縦軸にバッテリ許容上限駆動出力(kW)をとり、横軸にCDM許容上限積算時間(h)(許容上限放電エネルギー量(Wh)または許容上限積算走行距離(km)でもよい。以下には、許容上限積算時間の場合を例にして説明する。)をとっている。本実施形態では、5段階のバッテリ放電許容モードを設定している。MODE1では高出力かつ短時間の放電を許容し、MODE5では低出力かつ長時間の放電を許容している。またMODE1〜5の間では、許容バッテリ上限出力およびCDM許容上限積算時間を段階的に変化させている。なおバッテリ放電許容モードは5段階に限られず、2段階以上の任意の段数に設定すればよい。また、許容バッテリ上限出力およびCDM許容上限積算時間を段階的に変化させることなく、連続的に変化させてもよい。
FIG. 18A is a conceptual diagram of the battery discharge allowable mode. The vertical axis indicates the battery allowable upper limit drive output (kW), and the horizontal axis indicates the CDM allowable upper limit integrated time (h) (allowable upper limit discharge energy amount (Wh)). Alternatively, the allowable upper limit integrated travel distance (km) may be used, and the case of the allowable upper limit integrated time will be described below as an example. In this embodiment, a five-stage battery discharge permission mode is set.
図19は、バッテリ放電許容モードの設定方法の説明図である。図19(a)に示すように、本実施形態のハイブリッド車両は、車内にバッテリ放電許容モードの設定ダイヤル40を備えている。ダイヤル40の隣には、バッテリ放電許容モードの表示部42が設けられている。表示部42には、縦軸にPower(バッテリ許容上限駆動出力)をとり、横軸にTime(CDM許容上限積算時間)をとったグラフ46が示されている。ダイヤル40によりバッテリ放電許容モードを選択すると、そのモードに対応するバッテリ許容上限駆動出力およびCDM許容上限積算時間が、表示部42のグラフ46上に四角形44で表示されるようになっている。
FIG. 19 is an explanatory diagram of a method for setting the battery discharge allowable mode. As shown in FIG. 19A, the hybrid vehicle of this embodiment includes a
また図19(b)に示すように、高速電力線通信(Power Line Communications;PLC)により、車外からバッテリ放電許容モードを設定することも可能である。本実施形態のプラグインタイプのハイブリッド車両50は、充電用プラグ31を家庭用コンセント62に差込んでバッテリLBの充電が可能である。この家庭用コンセント62は他の家庭用コンセント64と共にLAN61に接続され、その家庭用コンセント64にPLCモデム(不図示)を介してパーソナルコンピュータ70が接続されている。なおパーソナルコンピュータ70にはPLCドライバソフトウエアがインストールされている。また車両50の制御部はPLCからの指示により各部を制御しうるようになっている。
このパーソナルコンピュータ70から、PLCによりハイブリッド車両50のバッテリ放電許容モードを設定することが可能である。すなわち、夜間などに車両まで行かなくても、家の中からバッテリ放電許容モードを設定することができるのである。具体的には、パーソナルコンピュータ70の表示部72に表示されたPower(許容上限駆動出力)およびTime(許容上限積算時間)の棒グラフを、マウス操作により伸縮することでバッテリ放電許容モードを設定する。なお一方の棒グラフを伸縮すれば、他方の棒グラフも連動するようになっている。
In addition, as shown in FIG. 19B, the battery discharge allowable mode can be set from outside the vehicle by high-speed power line communication (PLC). The plug-in
From this
EVモード判断の具体的な方法につき、図20のフローチャートを用いて説明する。
まずS070において、マニュアルモードか否かを判断する。上記のようにバッテリ放電許容モードを人為入力により設定するマニュアルモードの場合には、S070の判断が「YES」となってS071に進み、入力されたバッテリ放電許容モードの番号を読み込む。次にS072からS080において、モード1〜5に対応した許容上限駆動出力PLMT1〜5をPLECLMTに入力するとともに、許容上限積算時間T1〜5をTLMTに入力する。
A specific method for determining the EV mode will be described with reference to the flowchart of FIG.
First, in S070, it is determined whether or not the manual mode is set. In the case of the manual mode in which the battery discharge allowable mode is set by human input as described above, the determination in S070 is “YES”, the flow proceeds to S071, and the input battery discharge allowable mode number is read. Next, in S072 to S080, the allowable upper limit drive outputs PLMT1 to 5 corresponding to
図13に戻り、S033において、要求駆動出力PREQが、バッテリ放電許容モードに対応した許容上限駆動出力PLECLMTを超えているか判断する。S033の判断が「NO」の場合には、バッテリ放電のみで要求駆動出力を賄うBATT EVモードを実施できる可能性がある。そこで、ステップS034においてエンジン水温TWがBATT EV走行実施下限エンジン水温TWEVよりも大きいか否かを判定し、判定結果が「YES」である場合にはステップS035に進む。ステップS035ではCAT温(触媒温度)がBATT EV走行実施下限触媒温度TCATEVよりも大きいか否かを判定し、判定結果が「YES」である場合にはステップS040に進む。S040では、バッテリの出力積算時間Timeが、バッテリ放電許容モードに対応した許容上限積算時間TLMTを超えているか判断する。S040の判断が「NO」の場合には、バッテリ放電のみで要求駆動出力を賄うことができるから、S039に進んでBATT EVモード(図5参照)を実施する。 Returning to FIG. 13, in S033, it is determined whether the required drive output PREQ exceeds the allowable upper limit drive output PLECLMT corresponding to the battery discharge allowable mode. If the determination in S033 is “NO”, there is a possibility that the BATT EV mode that covers the required drive output only by battery discharge may be implemented. Therefore, in step S034, it is determined whether the engine water temperature TW is higher than the BATT EV travel execution lower limit engine water temperature TWEV. If the determination result is “YES”, the flow proceeds to step S035. In step S035, it is determined whether or not the CAT temperature (catalyst temperature) is higher than the BATT EV travel execution lower limit catalyst temperature TCATEV. If the determination result is “YES”, the process proceeds to step S040. In S040, it is determined whether the output integrated time Time of the battery exceeds the allowable upper limit integrated time TLMT corresponding to the battery discharge allowable mode. If the determination in S040 is “NO”, the requested drive output can be covered only by battery discharge, and therefore the process proceeds to S039 to implement the BATT EV mode (see FIG. 5).
これに対して、S033またはS040の判断が「YES」の場合には、バッテリ放電のみでは要求駆動出力を賄うことができないので、エンジンを運転するE−PASS EVモードまたはCHARGE EVモードを実施することになる。そこで、S037においてバッテリLBの残容量SOCが強制充電実施下限残容量SOCCHGよりも小さいか否かを判定する。ステップS037の判定結果が「YES」の場合には、バッテリLBの強制充電が必要であるから、S036に進んでCHARGE EVモード(図7参照)を実施する。ステップS037の判定結果が「NO」の場合には、バッテリLBの強制充電が不要であるから、S038に進んでE−PASS EVモード(図4参照)を実施する。 On the other hand, when the determination in S033 or S040 is “YES”, the required drive output cannot be covered only by the battery discharge, so the E-PASS EV mode or the CHARGE EV mode for operating the engine is to be performed. become. Therefore, in S037, it is determined whether or not the remaining capacity SOC of the battery LB is smaller than the forced charging execution lower limit remaining capacity SOCCHG. If the determination result in step S037 is “YES”, the battery LB needs to be forcibly charged, and thus the process proceeds to S036 to implement the CHARGE EV mode (see FIG. 7). If the determination result in step S037 is “NO”, it is not necessary to forcibly charge the battery LB, so the process proceeds to S038 and the E-PASS EV mode (see FIG. 4) is performed.
(オート設定)
本実施形態におけるバッテリ放電許容モードの設定方法として、上述したマニュアル設定だけでなく、運転者の運転傾向を学習したオート設定が可能である。これにより、許容上限駆動出力や許容上限積算時間をどの程度にマニュアル設定すればよいかわからないユーザに対しても、バッテリのエネルギーを有効活用する手法を提供することが可能になる。オート設定では、アクセルペダル開度等に基づく要求駆動出力の最大値をショートトリップごとに検出し、ハイブリッド車両から情報センターに送信する。情報センターでは、受信した要求駆動出力を運転者ごとに蓄積し、頻度が最大となる要求駆動出力を許容上限駆動出力の学習値に設定する。そして、設定した学習値をハイブリッド車両に送信する。
(Auto setting)
As a setting method of the battery discharge allowable mode in the present embodiment, not only the manual setting described above but also an automatic setting in which the driving tendency of the driver is learned is possible. As a result, it is possible to provide a method for effectively utilizing the energy of the battery even for users who do not know how much the allowable upper limit drive output and the allowable upper limit integration time should be set manually. In the auto setting, the maximum value of the required drive output based on the accelerator pedal opening degree is detected for each short trip and transmitted from the hybrid vehicle to the information center. In the information center, the received requested drive output is accumulated for each driver, and the requested drive output having the maximum frequency is set as a learning value of the allowable upper limit drive output. Then, the set learning value is transmitted to the hybrid vehicle.
オート設定の具体的な方法につき、図20〜23を用いて説明する。
図21は、トリップごとの最大要求駆動出力の決定方法のフローチャートである。まずS100において、今回イグニッションスイッチIGがONされたか判断する。S100の判断結果が「YES」の場合にはS101に進み、前回IGがONであったか判断する。S101の判断結果が「NO」の場合は、今回初めてIGがONされ、トリップが開始される場合である。この場合、S102において最大頻度の要求駆動出力PLMGXを情報センターから受信し、S103において最大要求駆動出力PLMGMAXの初期値を0に設定する。
A specific method of auto setting will be described with reference to FIGS.
FIG. 21 is a flowchart of a method for determining the maximum required drive output for each trip. First, in S100, it is determined whether the ignition switch IG is turned on this time. If the determination result in S100 is “YES”, the process proceeds to S101 to determine whether the previous IG was ON. If the determination result in S101 is “NO”, this is the case when the IG is turned ON for the first time and a trip is started. In this case, the maximum required drive output PLMGX is received from the information center in S102, and the initial value of the maximum required drive output PLMGMAX is set to 0 in S103.
次に、S100およびS101の判断結果がともに「YES」の場合は、IGをONにしたままトリップ中の場合である。この場合、S104において現在の要求駆動出力PREQが最大要求駆動出力PLMGMAXを超えたか判断する。判断結果が「YES」の場合はS105に進み、現在の要求駆動出力PREQを最大要求駆動出力PLMGMAXに入力する。
次に、S100の判断結果が「NO」の場合はS106に進み、前回IGがONであったか判断する。S101の判断結果が「YES」の場合は、今回初めてIGがOFFされ、トリップを終了する場合である。この場合、S107において最大要求駆動出力PLMGMAXをトリップ終了時の最大要求駆動出力PLMGに入力し、S108においてPLMGを情報センターに送信する。
Next, when both the determination results of S100 and S101 are “YES”, the trip is being performed while the IG is ON. In this case, it is determined in S104 whether the current required drive output PREQ exceeds the maximum required drive output PLMGMAX. If the determination result is “YES”, the process proceeds to S105, and the current required drive output PREQ is input to the maximum required drive output PLMGMAX.
Next, when the determination result of S100 is “NO”, the process proceeds to S106 to determine whether the previous IG was ON. When the determination result in S101 is “YES”, the IG is turned off for the first time this time and the trip is ended. In this case, the maximum required drive output PLMGMAX is input to the maximum required drive output PLMG at the end of trip in S107, and PLMG is transmitted to the information center in S108.
図22は、情報センターにおける学習値の決定方法のフローチャートである。まずS110において、トリップ終了時の最大要求駆動出力PLMGを車両から受信する。次にS112〜S117において、PLMGをP1〜Pnのいずれかのクラスに分類し、各クラスの頻度に加算する。
図23は、PLMGの頻度分布図である。図23では、横軸にクラスP1〜Pnをとり縦軸に頻度をとっている。上述した処理を繰り返すことにより、図23に示すようなPLMGの頻度分布図が得られる。例えば図23の場合には、クラスP2が最大頻度となっている。
図22に戻り、S118において、最大頻度となるクラスのPLMG(クラス内の中央値等)を、許容上限駆動出力の学習値PLMGXに設定する。そして、S119において学習値PLMGXを車両に送信する。
FIG. 22 is a flowchart of a learning value determination method in the information center. First, in S110, the maximum required drive output PLMG at the end of the trip is received from the vehicle. Next, in S112 to S117, PLMG is classified into any of classes P1 to Pn and added to the frequency of each class.
FIG. 23 is a frequency distribution diagram of PLMG. In FIG. 23, the horizontal axis represents classes P1 to Pn, and the vertical axis represents frequency. By repeating the above-described processing, a PLMG frequency distribution diagram as shown in FIG. 23 is obtained. For example, in the case of FIG. 23, class P2 has the highest frequency.
Returning to FIG. 22, in S <b> 118, the PLMG of the class having the maximum frequency (the median value in the class, etc.) is set to the learning value PLMGX of the allowable upper limit drive output. In S119, the learning value PLMGX is transmitted to the vehicle.
図20に戻り、S070の判断結果が「NO」の場合(オートモード)には、S090に進み、許容上限駆動出力および許容上限積算時間の学習値を更新(受信)済みか判断する。判断結果が「NO」の場合にはS091に進み、許容上限駆動出力の初期値PLMT0をPLECLMTに入力するとともに、許容上限積算時間の初期値T0をTLMTに入力する。
一方、S090の判断が「YES」の場合にはS092に進み、情報センターから許容上限駆動出力の学習値PLMGXを読み込む。次にS094においてテーブル検索を行い、PLMGXから許容上限積算時間の学習値TGを算出する。
図18(b)は、許容上限駆動出力の学習値PLMGXと許容上限積算時間の学習値TGとの関係を示すテーブルである。なお図18(b)および図18(a)は、縦軸および横軸が相互に逆転している。上述したように、許容上限駆動出力と許容上限積算時間とは反比例の関係にある。そこで図18(b)のテーブルを用いれば、許容上限駆動出力の学習値PLMGXから許容上限積算時間の学習値TGを求めることができる。
図20に戻り、S096において、許容上限駆動出力の学習値PLMGXをPLECLMTに入力するとともに、許容上限積算時間の学習値TGをTLMTに入力する。
Returning to FIG. 20, if the determination result in S070 is “NO” (auto mode), the process proceeds to S090, and it is determined whether the learned values of the allowable upper limit drive output and the allowable upper limit integration time have been updated (received). When the determination result is “NO”, the process proceeds to S091, where the initial value PLMT0 of the allowable upper limit drive output is input to PLECLMT, and the initial value T0 of the allowable upper limit integration time is input to TLMT.
On the other hand, if the determination in S090 is “YES”, the process proceeds to S092, and the learning value PLMGX of the allowable upper limit drive output is read from the information center. Next, a table search is performed in S094, and the learning value TG of the allowable upper limit integration time is calculated from PLMGX.
FIG. 18B is a table showing the relationship between the learned value PLMGX of the allowable upper limit drive output and the learned value TG of the allowable upper limit integration time. In FIG. 18B and FIG. 18A, the vertical axis and the horizontal axis are mutually reversed. As described above, the allowable upper limit drive output and the allowable upper limit integration time are in an inversely proportional relationship. Therefore, by using the table of FIG. 18B, the learning value TG of the allowable upper limit integration time can be obtained from the learning value PLMGX of the allowable upper limit drive output.
Returning to FIG. 20, in S096, the learning value PLMGX of the allowable upper limit drive output is input to PLECLMT, and the learning value TG of the allowable upper limit integration time is input to TLMT.
図13に戻り、学習値が入力されたPLECLMTおよびTLMTを用いて、上記と同様にS033〜S039の処理を行い、BATT EVモード(S039)、E−PASS EVモード(S038)およびCHARGE EVモード(S036)のうち、いずれを実施するか判断する。まずS033では、要求駆動出力PREQが、許容上限駆動出力の学習値が入力されたPLECLMTを超えているか判断する。S033の判断が「NO」の場合には、バッテリ放電のみで要求駆動出力を賄うBATT EVモードを実施できる可能性があるから、ステップS034およびステップS035の判定結果がともに「YES」の場合にはステップS040に進む。S040では、バッテリの出力積算時間Timeが、許容上限積算時間の学習値が入力されたTLMTを超えているか判断する。S040の判断が「NO」の場合には、バッテリ放電のみで要求駆動出力を賄うことができるから、S039に進んでBATT EVモード(図5参照)を実施する。
これに対して、S033またはS040の判断が「YES」の場合には、バッテリ放電のみでは要求駆動出力を賄うことができないので、エンジンを運転するE−PASS EVモードまたはCHARGE EVモードを実施する。
Returning to FIG. 13, using PLECLMT and TLMT to which the learning value is input, the processes of S033 to S039 are performed in the same manner as described above, and the BATT EV mode (S039), E-PASS EV mode (S038), and CHARGE EV mode ( It is determined which of S036) is to be performed. First, in S033, it is determined whether the required drive output PREQ exceeds PLECLMT to which the learning value of the allowable upper limit drive output is input. If the determination in S033 is “NO”, there is a possibility that the BATT EV mode that covers the required drive output only by battery discharge may be implemented. Therefore, if both the determination results in steps S034 and S035 are “YES” Proceed to step S040. In S040, it is determined whether the output integrated time Time of the battery exceeds the TLMT to which the learned value of the allowable upper limit integrated time is input. If the determination in S040 is “NO”, the requested drive output can be covered only by battery discharge, and therefore the process proceeds to S039 to implement the BATT EV mode (see FIG. 5).
On the other hand, when the determination in S033 or S040 is “YES”, since the required drive output cannot be covered only by battery discharge, the E-PASS EV mode or the CHARGE EV mode for operating the engine is performed.
以上に詳述したように、本実施形態に係るハイブリッド車両の制御装置は、要求駆動出力PREQのうち、車両の初回始動時から終了時までの一走行区間における最大の要求駆動出力PLMGMAXを記憶し、一走行区間の終了時における最大の要求駆動出力PLMGを情報センターへ送信し、情報センターは、送信された最大の要求駆動出力を所定範囲毎にクラス分けを行い、最大頻度となるクラスの要求駆動出力PLMGXを車両に送信し、送信された要求駆動出力PLMGXをBATT EVモードの許容上限駆動出力PLECLMTとし、要求駆動出力PLMGXを用いてテーブル検索した許容上限積算時間TGをBATT EVモードの許容上限積算時間TLMTとする構成とした。 As described above in detail, the hybrid vehicle control device according to the present embodiment stores the maximum required drive output PLMGMAX in one travel section from the initial start to the end of the vehicle among the required drive outputs PREQ. The maximum required drive output PLMG at the end of one travel section is transmitted to the information center, and the information center classifies the transmitted maximum required drive output for each predetermined range, and requests the class having the maximum frequency. The drive output PLMGX is transmitted to the vehicle, the transmitted request drive output PLMGX is set as the allowable upper limit drive output PLECLMT in the BATT EV mode, and the allowable upper limit integration time TG searched from the table using the request drive output PLMGX is set as the allowable upper limit in the BATT EV mode. It was set as the integration time TLMT.
この構成によれば、ドライバーの運転による要求駆動出力の最大値PLMGMAXを一走行区間ごとに記憶し、頻度が最大となる要求駆動出力PLMGXをEV走行モードの許容上限駆動出力PLECLMTとして自動的に設定するため、ドライバーの運転による要求駆動出力の大部分をEV走行モードで賄うことが可能になる。これにより、燃費と走行性能を両立することができる。また、許容上限駆動出力および許容上限積算時間の両方を設定することで、蓄電装置の過放電を防止することができる。 According to this configuration, the maximum value PLMGMAX of the required drive output by the driving of the driver is stored for each travel section, and the required drive output PLMGX having the maximum frequency is automatically set as the allowable upper limit drive output PLECLMT of the EV travel mode. Therefore, it is possible to cover most of the required drive output from the driving of the driver in the EV traveling mode. Thereby, both fuel consumption and running performance can be achieved. Further, by setting both the allowable upper limit drive output and the allowable upper limit integration time, it is possible to prevent overdischarge of the power storage device.
なお、本発明の技術範囲は上述した実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲において、上述した実施形態に種々の変更を加えたものを含む。すなわち、実施形態で挙げた具体的な構造や形状などはほんの一例に過ぎず、適宜変更が可能である。
例えば、実施形態ではクラッチを備えたハイブリッド車両を例に説明したが、クラッチを備えないパラレル形式等のハイブリッド車両に本発明を適用することも可能である。
また、実施形態ではシリーズパラレルハイブリッド形式を例に説明したが、単純なシリーズ形式など他のハイブリッド形式に本発明を適用することも可能である。
また、実施形態ではプラグインハイブリッド車両を例に説明したが、太陽電池などの外部エネルギーを利用したハイブリッド車両に本発明を適用することも可能である。
The technical scope of the present invention is not limited to the above-described embodiment, and includes various modifications made to the above-described embodiment without departing from the spirit of the present invention. That is, the specific structure and shape described in the embodiment are merely examples, and can be changed as appropriate.
For example, in the embodiment, a hybrid vehicle including a clutch has been described as an example. However, the present invention can also be applied to a parallel type hybrid vehicle that does not include a clutch.
In the embodiment, the series-parallel hybrid format has been described as an example, but the present invention can also be applied to other hybrid formats such as a simple series format.
In the embodiment, the plug-in hybrid vehicle has been described as an example. However, the present invention can also be applied to a hybrid vehicle using external energy such as a solar battery.
また、低燃費運転モードとして休筒運転が可能なエンジンを備えたハイブリッド車両に本発明を適用することも可能である。なお部分気筒休止可能な休筒エンジンとして、エンジンの気筒数が6気筒で3気筒を休止するエンジンや、4気筒で2気筒を休止するエンジン、4気筒で1気筒を休止するエンジンを備えたハイブリッド車両にも適用可能である。また、リーンバーン運転が可能なエンジンやHCCI運転が可能なエンジン(直噴で自己着火を行う形式のガソリンエンジン)等を備えたハイブリッド車両にも適用できる。また、変速ギヤとして5速ギヤを設けた場合について説明したが、6速ギヤとしてもよい。そして、エンジンE及び第2のモータM2で前輪側を駆動し、第1のモータM1で後輪を駆動する形式の車両にも適用できる。また、蓄電装置としてバッテリLBに限られずキャパシタを備えた車両にも適用できる。 Further, the present invention can also be applied to a hybrid vehicle including an engine that can perform a cylinder resting operation as a fuel-efficient driving mode. In addition, as a non-cylinder engine capable of partial cylinder deactivation, a hybrid equipped with an engine in which the number of cylinders of the engine is 6 cylinders and 3 cylinders are deactivated, an engine in which 4 cylinders are deactivated, and an engine in which 4 cylinders are deactivated is deactivated. It can also be applied to vehicles. The present invention can also be applied to a hybrid vehicle equipped with an engine capable of lean burn operation, an engine capable of HCCI operation (a gasoline engine of a type that performs self-ignition by direct injection), and the like. Moreover, although the case where the 5th speed gear was provided as a transmission gear was demonstrated, it is good also as a 6th speed gear. The invention can also be applied to a vehicle in which the front wheels are driven by the engine E and the second motor M2, and the rear wheels are driven by the first motor M1. Further, the power storage device is not limited to the battery LB and can be applied to a vehicle including a capacitor.
50…ハイブリッド車両
C…クラッチ
E…エンジン
LB…バッテリ(蓄電装置)
M1…第1のモータ(モータ)
M2…第2のモータ(ジェネレータ)
PREQ…要求駆動出力
PLMGMAX…最大の要求駆動出力
PLMG…終了時の最大の要求駆動出力
PLMGX…最も頻度の高い要求駆動出力の範囲値
PLECLMT…EV走行モードの許容上限駆動出力
TG…許容上限積算時間
TLMT…EV走行モードの許容上限積算時間
S006…要求駆動出力取得
S036…CHARGE EVモード(エンジン運転モード、シリーズ走行モード、チャージモード)
S037…バッテリ残容量算出
S038…E−PASS EVモード(エンジン運転モード、シリーズ走行モード、電気パス運転モード)
S039…BATT EVモード(EV走行モード)
S071〜S080…マニュアルモード
S092…要求駆動出力PLMGXを読み込み
S094…要求駆動出力PLMGXから許容上限積算時間TGをテーブル検索
S096…許容上限駆動出力PLECLMTおよび許容上限積算時間TLMTに設定(オートモード)
50 ... Hybrid vehicle C ... Clutch E ... Engine LB ... Battery (power storage device)
M1 ... first motor (motor)
M2 ... Second motor (generator)
PREQ: Required drive output PLMGMAX: Maximum requested drive output PLMG: Maximum requested drive output at the end PLMGX: Range value of the most frequently requested drive output PLECLMMT: Allowable upper limit drive output in EV travel mode TG: Allowable upper limit integration time TLMT ... Allowable upper limit integration time of EV travel mode S006 ... Request drive output acquisition S036 ... CHARGE EV mode (engine operation mode, series travel mode, charge mode)
S037: Battery remaining capacity calculation S038: E-PASS EV mode (engine operation mode, series travel mode, electric pass operation mode)
S039 ... BATT EV mode (EV driving mode)
S071 to S080: Manual mode S092: Requested drive output PLMGX is read S094: Allowable upper limit accumulated time TG is searched from request drive output PLMGX S096: Allowable upper limit drive output PLECLMT and allowable upper limit accumulated time TLMT are set (auto mode)
Claims (7)
車両に要求される要求駆動出力を取得する要求駆動出力取得手段と、
前記要求駆動出力取得手段から送信された要求駆動出力を蓄積する要求駆動出力情報蓄積部と、
前記モータのみで走行するEV走行モードの許容上限駆動出力を決定するEV走行モード許容上限駆動出力決定手段と、を備え、
前記制御装置は、要求駆動出力が前記EV走行モードの許容上限駆動出力を超えた場合に少なくとも前記エンジンを運転させるエンジン運転モードと、前記EV走行モードとを切り換え、
前記要求駆動出力取得手段は、前記要求駆動出力のうち、前記車両の初回始動時から終了時までの一走行区間における最大の要求駆動出力を記憶し、前記一走行区間の終了時に前記最大の要求駆動出力を前記要求駆動出力情報蓄積部へ送信し、
前記駆動出力情報蓄積部は、送信された前記最大の要求駆動出力を所定の要求駆動出力の範囲毎に分類分けを行い、前記分類分けにより得られたデータに基づいて、最も頻度の高い前記要求駆動出力の範囲値を、前記EV走行モード許容上限駆動出力決定手段に送信し、
前記制御装置は、送信された前記範囲値を前記EV走行モードの許容上限駆動出力として自動的に設定するオートモードを選択可能であり、
前記EV走行モードの許容上限駆動出力は、前記一走行区間における前記蓄電装置の許容上限駆動出力であり、前記許容上限駆動出力に基づいて前記蓄電装置の許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離が設定され、
前記エンジン運転モードでは、要求駆動出力が前記EV走行モードの許容上限駆動出力を超えた場合のほか、前記蓄電装置の前記許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離を超えた場合にも前記エンジンを運転させ、
前記許容上限駆動出力と、前記許容上限積算時間、許容上限放電エネルギー量または許容上限積算走行距離とは、互いに反比例の関係に設定されることを特徴とするハイブリッド車両の制御装置。 A control device for a hybrid vehicle comprising an engine, a motor, and a power storage device that exchanges electric power with the motor ,
Request drive output acquisition means for acquiring the required drive output required for the vehicle;
A request drive output information storage unit for storing the request drive output transmitted from the request drive output acquisition means;
And a EV mode allowable upper drive output determining means for determining the allowable upper limit drive output EV traveling mode that is driven only by the motor,
The control device switches between an engine operation mode for operating the engine at least when the required drive output exceeds an allowable upper limit drive output of the EV travel mode, and the EV travel mode,
The requested drive output acquisition means stores the maximum requested drive output in one travel section from the initial start to the end of the vehicle among the requested drive outputs, and the maximum request at the end of the one travel section. Send drive output to the required drive output information storage unit,
The drive output information storage unit classifies the transmitted maximum request drive output for each predetermined request drive output range, and based on the data obtained by the classification, the request with the highest frequency The range value of the drive output is transmitted to the EV travel mode allowable upper limit drive output determination means,
The control device is capable of selecting an auto mode that automatically sets the transmitted range value as an allowable upper limit drive output of the EV travel mode ,
The allowable upper limit drive output of the EV travel mode is an allowable upper limit drive output of the power storage device in the one travel section, and based on the allowable upper limit drive output, an allowable upper limit integrated time, an allowable upper limit discharge energy amount of the power storage device, or Allowable upper limit accumulated mileage is set,
In the engine operation mode, when the required drive output exceeds the allowable upper limit drive output of the EV travel mode, the allowable upper limit integrated time, the allowable upper limit discharge energy amount or the allowable upper limit integrated travel distance of the power storage device is exceeded. In some cases, the engine is operated,
The control apparatus for a hybrid vehicle , wherein the allowable upper limit drive output, the allowable upper limit integrated time, the allowable upper limit discharge energy amount, or the allowable upper limit integrated travel distance are set in an inversely proportional relationship .
前記エンジン運転モードは、前記エンジンを駆動させることで前記ジェネレータを発電させて前記モータで走行するシリーズ走行モードを含むことを特徴とする請求項1ないし請求項3のいずれか1項に記載のハイブリッド車両の制御装置。 The vehicle further includes a generator,
The engine operating mode, a hybrid of any one of claims 1 to 3, characterized in that it comprises a series drive mode in which the vehicle travels with the motor by generating the generator by driving the engine Vehicle control device.
前記蓄電装置は、前記ジェネレータとも電力の授受を行い、
前記シリーズ走行モードは、前記ジェネレータで発電した電気の一部を前記モータへ送り、残部を前記蓄電装置に充電させて走行するチャージモードと、
前記ジェネレータで発電した電気の全部を直接前記モータへ送って走行する電気パス運転モードと、を備えており、
前記残容量が所定値より小さい場合、前記チャージモードを選択し、
前記残容量が所定値以上の場合、前記電気パス運転モードを選択することを特徴とする請求項4に記載のハイブリッド車両の制御装置。 A remaining capacity calculating means for calculating a remaining capacity of the power storage device;
The power storage device also exchanges power with the generator,
The series travel mode is a charge mode in which a part of the electricity generated by the generator is sent to the motor and the remaining part is charged to the power storage device to travel,
An electric path operation mode in which all the electricity generated by the generator is directly sent to the motor and travels, and
If the remaining capacity is smaller than a predetermined value, select the charge mode,
The hybrid vehicle control device according to claim 4 , wherein the electric path operation mode is selected when the remaining capacity is equal to or greater than a predetermined value.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008147267A JP5116565B2 (en) | 2008-06-04 | 2008-06-04 | Control device for hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008147267A JP5116565B2 (en) | 2008-06-04 | 2008-06-04 | Control device for hybrid vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009292287A JP2009292287A (en) | 2009-12-17 |
| JP5116565B2 true JP5116565B2 (en) | 2013-01-09 |
Family
ID=41540894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008147267A Expired - Fee Related JP5116565B2 (en) | 2008-06-04 | 2008-06-04 | Control device for hybrid vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5116565B2 (en) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9061680B2 (en) | 2007-07-12 | 2015-06-23 | Odyne Systems, Llc | Hybrid vehicle drive system and method for fuel reduction during idle |
| US20120207620A1 (en) | 2007-07-12 | 2012-08-16 | Odyne Systems, LLC. | Hybrid vehicle drive system and method and idle reduction system and method |
| US8408341B2 (en) | 2007-07-12 | 2013-04-02 | Odyne Systems, Llc | Hybrid vehicle drive system and method and idle reduction system and method |
| JP4341704B2 (en) | 2007-07-12 | 2009-10-07 | トヨタ自動車株式会社 | Hybrid vehicle and control method of hybrid vehicle |
| US9878616B2 (en) | 2007-07-12 | 2018-01-30 | Power Technology Holdings Llc | Hybrid vehicle drive system and method using split shaft power take off |
| US8978798B2 (en) | 2007-10-12 | 2015-03-17 | Odyne Systems, Llc | Hybrid vehicle drive system and method and idle reduction system and method |
| US9428041B2 (en) | 2009-12-16 | 2016-08-30 | Honda Motor Co., Ltd. | Hybrid vehicle and control method thereof |
| CN104118424B (en) | 2009-12-16 | 2017-06-20 | 本田技研工业株式会社 | Motor vehicle driven by mixed power and its control method |
| MY166068A (en) | 2009-12-22 | 2018-05-23 | Honda Motor Co Ltd | Controller for hybrid vehicle |
| JP5584282B2 (en) * | 2010-03-02 | 2014-09-03 | 本田技研工業株式会社 | Control device for hybrid vehicle |
| CN102883934B (en) | 2010-04-07 | 2016-08-03 | 丰田自动车株式会社 | The controlling device and there is the motor vehicle driven by mixed power of this control device of motor vehicle driven by mixed power |
| CN104125902B (en) * | 2011-12-02 | 2018-04-06 | 电力科技控股有限责任公司 | System and method for the fuel optimization in hybrid vehicle |
| US11225240B2 (en) | 2011-12-02 | 2022-01-18 | Power Technology Holdings, Llc | Hybrid vehicle drive system and method for fuel reduction during idle |
| JP5772809B2 (en) * | 2012-12-26 | 2015-09-02 | トヨタ自動車株式会社 | Vehicle control device |
| JP5848283B2 (en) * | 2013-06-21 | 2016-01-27 | トヨタ自動車株式会社 | Control device for hybrid vehicle and hybrid vehicle including the same |
| KR101498698B1 (en) * | 2013-07-25 | 2015-03-06 | (주) 세인 | Driving Control Apparatus Changing Driving Mode for Extending Distance |
| EP3071438A4 (en) | 2013-11-18 | 2017-08-02 | Power Technology Holdings LLC | Hybrid vehicle drive system and method using split shaft power take off |
| JP6172008B2 (en) * | 2014-03-24 | 2017-08-02 | トヨタ自動車株式会社 | Hybrid vehicle |
| JPWO2017158960A1 (en) * | 2016-03-16 | 2018-11-08 | オートモーティブエナジーサプライ株式会社 | Selection method of lithium-ion secondary battery for hybrid electric vehicle and hybrid electric vehicle |
| US10781910B2 (en) | 2017-08-03 | 2020-09-22 | Power Technology Holdings Llc | PTO lubrication system for hybrid vehicles |
| JP6969357B2 (en) * | 2017-12-20 | 2021-11-24 | トヨタ自動車株式会社 | Vehicle hybrid system |
| JP7363676B2 (en) * | 2020-06-16 | 2023-10-18 | トヨタ自動車株式会社 | Hybrid vehicle control system and control method |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3478132B2 (en) * | 1998-07-13 | 2003-12-15 | 日産自動車株式会社 | Drive control device for parallel hybrid vehicle |
| JP3536846B2 (en) * | 2002-10-04 | 2004-06-14 | 日産自動車株式会社 | Vehicle driving force control device |
| JP3981067B2 (en) * | 2003-11-14 | 2007-09-26 | 株式会社エクォス・リサーチ | Travel speed data classification device, travel speed pattern estimation device, and hybrid vehicle drive control device |
| JP4296957B2 (en) * | 2004-02-18 | 2009-07-15 | トヨタ自動車株式会社 | Control device for continuously variable transmission for vehicle |
| JP4554551B2 (en) * | 2006-04-28 | 2010-09-29 | 本田技研工業株式会社 | Vehicle travel control device |
| JP4680124B2 (en) * | 2006-04-28 | 2011-05-11 | 本田技研工業株式会社 | Drive control apparatus for hybrid vehicle |
-
2008
- 2008-06-04 JP JP2008147267A patent/JP5116565B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009292287A (en) | 2009-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5116565B2 (en) | Control device for hybrid vehicle | |
| CN103978974B (en) | System and method for implementing dynamic operation mode and control strategy used in hybrid electric vehicle | |
| US9849869B2 (en) | Systems and methods for implementing dynamic operating modes and control policies for hybrid electric vehicles | |
| CN101557974B (en) | Hybrid vehicle, control method of hybrid vehicle and computer readable recording medium recording program for making computer execute that control method | |
| Gao et al. | Design and control methodology of plug-in hybrid electric vehicles | |
| WO2014109065A1 (en) | Hybrid-vehicle control device and control method | |
| US20100204863A1 (en) | Vehicle drive power generation control apparatus | |
| KR101765639B1 (en) | Charging control apparatus and method of the same for hybrid electric vehicle | |
| KR20180050994A (en) | Apparatus and method for controlling temperature of motor for green car | |
| JP6172008B2 (en) | Hybrid vehicle | |
| CN102275497A (en) | Transitioning between series-drive and parallel-drive in a hybrid-electric vehicle powertrain | |
| CN104421089A (en) | System and method for starting engine of HEV (Hybrid Electric Vehicle) | |
| JP2014222989A (en) | Regeneration control apparatus for electric automobile | |
| KR102359578B1 (en) | Method for determining optimal operating point for hybrid electric vehicle | |
| CN103827467A (en) | Vehicle and method for controlling vehicle | |
| JP6582928B2 (en) | Shift control device for hybrid vehicle | |
| JP6432534B2 (en) | Hybrid vehicle | |
| JPWO2009041138A1 (en) | Control method of hybrid vehicle | |
| JP7487474B2 (en) | Assist control device | |
| JP2010000833A (en) | Control device for hybrid vehicle | |
| KR102274014B1 (en) | Regenerative braking apparatus for vehicle and method of the same | |
| CN110667564A (en) | Intelligent energy management method for autonomous platooning of parallel hybrid electric vehicles | |
| US20170334281A1 (en) | Vehicle | |
| JP2017100473A (en) | Motor assist control device of hybrid vehicle | |
| CN113022537B (en) | Vehicle control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120612 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121016 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |