JP5111846B2 - Ultrasonic output element - Google Patents
Ultrasonic output element Download PDFInfo
- Publication number
- JP5111846B2 JP5111846B2 JP2006354917A JP2006354917A JP5111846B2 JP 5111846 B2 JP5111846 B2 JP 5111846B2 JP 2006354917 A JP2006354917 A JP 2006354917A JP 2006354917 A JP2006354917 A JP 2006354917A JP 5111846 B2 JP5111846 B2 JP 5111846B2
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- piezoelectric ceramic
- ceramic diaphragm
- drive
- ultrasonic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Transducers For Ultrasonic Waves (AREA)
- Measuring Volume Flow (AREA)
Description
本発明は超音波出力素子に関する。 The present invention relates to an ultrasonic output element.
従来、都市ガスや水などの流量を計測するための超音波流量計が知られている。その際の測定原理として、一般には「伝搬時間差法」が用いられる。これは、流路の流体流れ方向上流側及び下流側に一対の超音波送受信部を設け、それら超音波送受信部間の超音波送受信方向を交互に切り替えるとともに、上流側超音波送受信部から発信された超音波ビームが下流側超音波送受信部に到達するまでの時間(順方向伝播時間)と、下流側超音波送受信部から発信された超音波ビームが上流側超音波送受信部に到達するまでの時間(逆方向伝播時間)とを計測して、両者の時間差から流路を流れる流体の平均流速度及び流量を求めるものである(例えば、特許文献1)。 Conventionally, an ultrasonic flowmeter for measuring a flow rate of city gas or water is known. In general, a “propagation time difference method” is used as a measurement principle at that time. This is provided with a pair of ultrasonic transmission / reception units upstream and downstream in the fluid flow direction of the flow path, alternately switching the ultrasonic transmission / reception direction between the ultrasonic transmission / reception units, and transmitted from the upstream ultrasonic transmission / reception unit. The time until the ultrasonic beam reaches the downstream ultrasonic transmission / reception unit (forward propagation time) and the time until the ultrasonic beam transmitted from the downstream ultrasonic transmission / reception unit reaches the upstream ultrasonic transmission / reception unit Time (reverse propagation time) is measured, and the average flow velocity and flow rate of the fluid flowing through the flow path are obtained from the time difference between the two (for example, Patent Document 1).
上記のような流量計に使用される超音波送受信部(超音波トランスデューサ)は振動駆動部が圧電セラミック振動板にて構成される。該流量計では、超音波送受信部が長期にわたって使用され、最近では使用年数が10年を超える要求も想定されている。このような長期使用中においては、振動駆動部の経時劣化により超音波送受信部の出力特性がドリフトすることがある。近年、流量計に要求されるスペックがますます厳しくなる中、上記の劣化により超音波送受信部が要求される耐用年数を充足できなくなることが懸念される。流量出力のゼロ点がドリフトすると流量の測定精度が悪化し、正確な計測ができなくなることにつながる。 In the ultrasonic transmission / reception unit (ultrasonic transducer) used in the flow meter as described above, the vibration driving unit is constituted by a piezoelectric ceramic diaphragm. The flow meter, ultrasonic transmitting and receiving unit is used over a long term, have recently been envisaged also request age exceeds 10 years. During such long-term use, the output characteristics of the ultrasonic transmission / reception unit may drift due to aging of the vibration drive unit. In recent years, specs required for flowmeters have become more and more severe, and there is a concern that the above-described deterioration may make it impossible for the ultrasonic transmitting / receiving unit to meet the required service life. If the zero point of the flow rate output drifts, the measurement accuracy of the flow rate will deteriorate, leading to an inability to perform accurate measurement.
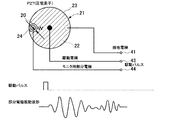
具体的には、超音波送受信部においては、振動駆動部を駆動してから超音波が被測定流体(媒質:例えば都市ガス)中へ放射されるまでに一定の時間遅れが存在する。すなわち、図7に示すように、外部からの駆動信号を受けることで、その信号が圧電セラミック振動板にて機械振動に変換され、さらに音響インピーダンス整合層を伝播して被測定流体へ放射されるので、上記の駆動信号の入力タイミングから超音波が被測定流体に放出されるまでに一定の遅延時間が存在する。 Specifically, in the ultrasonic transmission / reception unit, there is a certain time delay from when the vibration driving unit is driven to when the ultrasonic wave is emitted into the fluid to be measured (medium: city gas, for example). That is, as shown in FIG. 7, when an external driving signal is received, the signal is converted into mechanical vibration by the piezoelectric ceramic diaphragm, and further propagated through the acoustic impedance matching layer and radiated to the fluid to be measured. Therefore, there is a certain delay time from the input timing of the driving signal until the ultrasonic wave is emitted to the fluid to be measured.
従来の流量計測では、超音波の被測定流体への放出タイミングを、駆動信号の入力タイミングに置き換えて超音波伝播時間の計測起点として用いていた。駆動信号の入力タイミングから超音波の被測定流体への放出タイミングに至る遅延時間が一定であれば、該遅延時間の計測誤差への寄与も一定であり容易に補正可能であるが、該遅延時間が振動駆動部の経時劣化に伴い変動すると該寄与は一定でなくなり、補正はもはや不能となる。例えば、工場出荷時に記憶された超音波送受信部の初期ゼロ点流量が経時ドリフトすると、流れがないにも拘わらず流れがあると誤計測したり、逆に流れがあるにも関わらず流れがないと認識してしまったりする問題を引き起こすことになる。 In the conventional flow rate measurement, the emission timing of the ultrasonic wave to the fluid to be measured is replaced with the input timing of the drive signal and used as a measurement start point of the ultrasonic propagation time. If the delay time from the input timing of the drive signal to the emission timing of the ultrasonic wave to the fluid to be measured is constant, the contribution of the delay time to the measurement error is also constant and can be easily corrected. If the fluctuation varies with the deterioration of the vibration drive unit over time, the contribution is not constant, and correction is no longer possible. For example, if the initial zero point flow rate of the ultrasonic transmission / reception unit stored at the time of shipment from the factory drifts with time, it may be erroneously measured that there is a flow even though there is no flow, or conversely there is no flow even though there is a flow It will cause problems that you may recognize.
本発明の課題は、駆動信号が入力された圧電セラミック振動板の振動波形をリアルタイムでモニタリングでき、例えば、駆動信号の入力タイミングから超音波の被測定流体への放出タイミングに至る遅延時間を把握する上で好都合な構造を有する超音波出力素子を提供することにある。 An object of the present invention is to monitor a vibration waveform of a piezoelectric ceramic diaphragm to which a drive signal is input in real time, for example, to grasp a delay time from an input timing of a drive signal to a discharge timing of ultrasonic waves to a fluid to be measured. It is an object of the present invention to provide an ultrasonic output element having the above-mentioned advantageous structure.
上記の課題を解決するために、本発明の超音波出力素子は、
板厚方向に分極処理された圧電セラミック振動板と、
該圧電セラミック振動板の各主表面を覆う形で該圧電セラミック振動板を挟んで対向形成され、該圧電セラミック振動板を超音波振動させるための駆動電圧が印加される主電極対と、
主電極対のいずれとも絶縁分離した形で圧電セラミック振動板上に形成され、駆動電圧の印加に伴い圧電セラミック振動板に生ずる超音波振動の圧電モニタリング信号を取り出すためのモニタ用部分電極とを備えたことを前提とする。
In order to solve the above problems, the ultrasonic output element of the present invention is:
A piezoelectric ceramic diaphragm polarized in the plate thickness direction;
A main electrode pair formed so as to oppose the piezoelectric ceramic diaphragm so as to cover each main surface of the piezoelectric ceramic diaphragm, and to which a driving voltage for ultrasonically vibrating the piezoelectric ceramic diaphragm is applied;
A monitor partial electrode for taking out a piezoelectric monitoring signal of ultrasonic vibration generated on the piezoelectric ceramic diaphragm when a drive voltage is applied; Assuming that
上記本発明の超音波出力素子の構成によると、振動駆動部の要部をなす圧電セラミック振動板に、駆動用の電極以外に、駆動電圧の印加に伴い当該の圧電セラミック振動板に生ずる超音波振動の圧電モニタリング信号を取り出すためのモニタ用部分電極を設けたので、駆動信号が入力された圧電セラミック振動板の振動波形をリアルタイムでモニタリングできる。 According to the configuration of the ultrasonic output element of the present invention, in addition to the driving electrode, the ultrasonic wave generated in the piezoelectric ceramic diaphragm upon application of the driving voltage to the piezoelectric ceramic diaphragm forming the main part of the vibration driving unit. Since the monitoring partial electrode for taking out the piezoelectric monitoring signal of vibration is provided, the vibration waveform of the piezoelectric ceramic diaphragm to which the drive signal is input can be monitored in real time.
例えば、駆動信号が入力された後、圧電セラミック振動板での遅延を含めて、実際にいつ超音波振動が圧電セラミック振動板に発生したかを、このモニタ用部分電極の波形を監視することで知ることができる。従って、駆動信号の入力タイミングからモニタ用部分電極の出力に振動波形が現われるまでの時間を計測すれば、駆動信号の入力タイミングから超音波の被測定流体への放出タイミングに至る遅延時間を正確に把握できる。特に、遅延時間が振動駆動部の経時劣化に伴い変動した場合でも、モニタ用部分電極の出力監視により該遅延時間を特定することで、超音波伝播時間の測定基準を、超音波の被測定流体への実際の放出タイミングに近づけることができ、超音波出力素子のゼロ点流量が経時ドリフトの影響を受け難くなる。なお、モニタ用部分電極の出力に特定の振動波形が現われるタイミングを検知して、これを超音波伝播時間の測定基準として使用することも当然可能である。この場合、遅延時間自体を測定により特定する必要は必ずしも生じない。 For example, by monitoring the waveform of the partial electrode for monitoring, when the ultrasonic vibration is actually generated in the piezoelectric ceramic diaphragm, including the delay in the piezoelectric ceramic diaphragm after the drive signal is input. I can know. Therefore, if the time from the input timing of the drive signal to the appearance of the vibration waveform at the output of the monitor partial electrode is measured, the delay time from the input timing of the drive signal to the release timing of the ultrasonic wave to the fluid to be measured can be accurately determined. I can grasp. In particular, even when the delay time fluctuates with the deterioration of the vibration drive unit with time, by specifying the delay time by monitoring the output of the monitoring partial electrode, the ultrasonic propagation time can be measured as the measurement target of the ultrasonic wave. Therefore, the zero point flow rate of the ultrasonic output element is not easily affected by drift over time. Of course, it is also possible to detect the timing at which a specific vibration waveform appears in the output of the monitoring partial electrode and use this as a measurement standard for the ultrasonic propagation time. In this case, it is not always necessary to specify the delay time itself by measurement.
なお、本発明の超音波出力素子は、電気機械変換素子である圧電セラミック振動板を振動駆動部として採用しているので、別の超音波出力素子から放出された超音波を受けたとき、その超音波が励起する圧電セラミック振動板の機械的振動を、駆動電極から電気信号波形として取り出すことができ、超音波受信素子としても用いることができる。 The ultrasonic output element of the present invention employs a piezoelectric ceramic diaphragm as an electromechanical conversion element as a vibration drive unit, so when receiving an ultrasonic wave emitted from another ultrasonic output element, The mechanical vibration of the piezoelectric ceramic diaphragm excited by ultrasonic waves can be extracted from the drive electrode as an electric signal waveform, and can also be used as an ultrasonic receiving element.
上記本発明の超音波出力素子において、主電極対は、圧電セラミック振動板の第一主表面を覆う接地電極(GND側に接続される)と、同じく第二主表面を覆う駆動電極(駆動電源側に接続される)とからなるものとして構成できる。主電極対による圧電セラミック振動板の振動駆動が妨げられないように、モニタ用部分電極は、それら接地電極及び駆動電極のいずれよりも圧電セラミック振動板に対する被覆面積を小さく形成することが望ましい。 In the ultrasonic output element of the present invention, the main electrode pair includes a ground electrode (connected to the GND side) covering the first main surface of the piezoelectric ceramic diaphragm and a drive electrode (drive power source) covering the second main surface. Connected to the side). It is desirable that the monitoring partial electrode be formed so that the covering area of the piezoelectric ceramic diaphragm is smaller than any of the ground electrode and the drive electrode so that the vibration driving of the piezoelectric ceramic diaphragm by the main electrode pair is not hindered.
この場合、圧電セラミック振動板の両主表面を覆う駆動電極と接地電極とのいずれかの一部領域を切り欠いて、その切り欠かれた領域にモニタ用部分電極を形成するとよい。これにより、圧電セラミック振動板の主表面を覆う駆動電極又は接地電極とモニタ用部分電極とを、周知の電極パターニング手法(例えばフォトリソグラフィー)により一括形成できる利点がある。 In this case, it is preferable to cut out a partial region of either the drive electrode or the ground electrode that covers both main surfaces of the piezoelectric ceramic diaphragm and form a monitor partial electrode in the cut-out region. Accordingly, there is an advantage that the drive electrode or the ground electrode and the monitor partial electrode covering the main surface of the piezoelectric ceramic diaphragm can be collectively formed by a well-known electrode patterning technique (for example, photolithography).
なお、モニタ用部分電極についても出力取出時の電圧基準を接地により与えてやる必要があるので、駆動電極とモニタ用部分電極とで接地電極を共用する構成が、振動駆動部の構造を簡略化する上でも好都合である。具体的には、駆動電極は接地電極よりも圧電セラミック振動板に対する被覆面積を小さく形成し、該圧電セラミック振動板の第二主表面の駆動電極に覆われていない残余領域にモニタ用部分電極を形成するとよい。 In addition, since it is necessary to provide the voltage reference for the output of the monitor partial electrode by grounding, the configuration in which the drive electrode and the monitor partial electrode share the ground electrode simplifies the structure of the vibration drive unit. This is also convenient. Specifically, the drive electrode is formed to have a smaller covering area on the piezoelectric ceramic diaphragm than the ground electrode, and the monitor partial electrode is provided in the remaining area not covered by the drive electrode on the second main surface of the piezoelectric ceramic diaphragm. It is good to form.
この場合、モニタ用部分電極を圧電セラミック振動板の第二主表面の外周縁領域に形成しておくと、該モニタ用部分電極による圧電セラミック振動板の振動駆動特性への影響を軽減することができる。 In this case, if the partial electrode for monitoring is formed in the outer peripheral area of the second main surface of the piezoelectric ceramic diaphragm, the influence of the partial electrode for monitoring on the vibration drive characteristics of the piezoelectric ceramic diaphragm can be reduced. it can.
圧電セラミック振動板が円板状に形成される場合、駆動電極は該圧電セラミック振動板の外周縁に沿う円状の外周縁形状を有するものとして形成できる。この場合、当該円状の外周縁の一部を半径方向内側に凹状に引っ込ませる形で駆動電極の一部を切り欠き、その切欠き領域の内側にモニタ用部分電極を形成することができる。このようにすると、モニタ用部分電極の形成面積を十分縮小しつつ、出力取り出し用のワイヤや半田付け部を容易に形成することができる。 When the piezoelectric ceramic diaphragm is formed in a disk shape, the drive electrode can be formed to have a circular outer peripheral shape along the outer peripheral edge of the piezoelectric ceramic diaphragm. In this case, it is possible to cut out a part of the drive electrode in such a manner that a part of the circular outer peripheral edge is recessed inwardly in the radial direction, and a monitor partial electrode can be formed inside the cutout region. In this way, it is possible to easily form an output output wire and a soldering portion while sufficiently reducing the formation area of the monitor partial electrode.
また、駆動電極側の外周縁は、モニタ用部分電極との隣接位置にて、該駆動電極とモニタ用部分電極との間に所定幅の隙間を形成する形で、該モニタ用部分電極の外周縁に倣う形状に形成することができる。これにより、駆動電極とモニタ用部分電極との絶縁を確保しつつ、圧電セラミック振動板の振動駆動上のデッドエリアとなる、駆動電極とモニタ用部分電極との間の露出部を最小限に留めることができる。駆動電極とモニタ用部分電極との間に形成される隙間の幅は、0.5mm以上2.5mm以下とするのがよい。0.5mm以下では駆動電極とモニタ用部分電極との絶縁性を十分に確保できなくなる場合があり(例えば、メッキ不良や導電性異物付着によるブリッジングなど)、2.5mm以下では圧電セラミック振動板の振動駆動上のデッドエリアが増加しすぎ、超音波振動の駆動効率が低下する問題につながる。 Further, the outer peripheral edge on the drive electrode side is formed at a position adjacent to the monitor partial electrode by forming a gap with a predetermined width between the drive electrode and the monitor partial electrode. It can be formed in a shape that follows the periphery. This minimizes the exposed portion between the drive electrode and the monitor partial electrode, which is a dead area in the vibration drive of the piezoelectric ceramic diaphragm, while ensuring insulation between the drive electrode and the monitor partial electrode. be able to. The width of the gap formed between the drive electrode and the monitor partial electrode is preferably 0.5 mm or more and 2.5 mm or less. If the thickness is 0.5 mm or less, sufficient insulation between the drive electrode and the monitor partial electrode may not be ensured (for example, bridging due to plating failure or conductive foreign matter adhesion), and if the thickness is 2.5 mm or less, the piezoelectric ceramic diaphragm This leads to a problem that the dead area on the vibration drive increases so much that the drive efficiency of the ultrasonic vibration is lowered.
圧電セラミック振動板は、駆動電極及びモニタ用部分電極の形成された第二主表面側がケーシングの底部内面と対向する形で該ケーシング内に配置することができる。この場合、ケーシングの底部裏面に突出形成された駆動端子及びモニタ端子に対し、駆動電極及びモニタ用部分電極をそれぞれ接続することができる。これにより、駆動電極及びモニタ用部分電極の駆動端子及びモニタ端子への導通経路の引き回し距離を短縮でき、配線構造を単純化でき、信頼性も向上する。この場合、圧電セラミック振動板とケーシングの底部との間に絶縁層を配置することができる。駆動端子と駆動電極及びモニタ端子とモニタ用部分電極とは、絶縁層を貫く個別のワイヤによりそれぞれボンディングすることができるので、ボンディングワイヤの引き回し長を削減できる。これにより、耐ノイズ性の向上や、電極ワイヤ間の機械的干渉回避等を図ることができる。なお、駆動端子及びモニタ端子の接続端を基板上に形成したパッドとし、ここに駆動電極及びモニタ用部分電極を面実装する構成も可能である。 The piezoelectric ceramic diaphragm can be disposed in the casing such that the second main surface side on which the drive electrode and the monitor partial electrode are formed faces the bottom inner surface of the casing. In this case, the drive electrode and the monitor partial electrode can be connected to the drive terminal and the monitor terminal that are formed to protrude from the bottom rear surface of the casing. As a result, it is possible to shorten the routing distance of the conduction path to the drive terminal and the monitor terminal of the drive electrode and the partial electrode for monitoring, simplify the wiring structure, and improve the reliability. In this case, an insulating layer can be disposed between the piezoelectric ceramic diaphragm and the bottom of the casing. The drive terminal, the drive electrode, the monitor terminal, and the monitor partial electrode can be bonded by individual wires penetrating the insulating layer, so that the length of the bonding wire can be reduced. Thereby, improvement in noise resistance, avoidance of mechanical interference between electrode wires, and the like can be achieved. It is also possible to adopt a configuration in which the connection end of the drive terminal and the monitor terminal is a pad formed on the substrate, and the drive electrode and the monitor partial electrode are surface-mounted here.
一方、接地電極への導通経路は、圧電セラミック振動板の第二主表面側から該圧電セラミック振動板の側周面を経て第一主表面側に回り込む形で形成されることとなる。この場合、ケーシングの底部裏面に突出形成された接地端子に接地電極が該導通経路を介して接続することができる。これにより、ケーシングの裏面に、接地端子、駆動端子及びモニタ端子を集合させることができ、ケーブルコネクタ等の接続も容易である。 On the other hand, the conduction path to the ground electrode is formed so as to wrap around from the second main surface side of the piezoelectric ceramic diaphragm to the first main surface side through the side peripheral surface of the piezoelectric ceramic diaphragm. In this case, the ground electrode can be connected via the conduction path to the ground terminal protruding from the bottom rear surface of the casing. Thereby, the ground terminal, the drive terminal, and the monitor terminal can be assembled on the back surface of the casing, and connection of a cable connector or the like is easy.
また、圧電セラミック振動板は、ケーシングの底部と反対側の開口に望む位置に配置することができる。この場合、該開口を塞ぐ形で、圧電セラミック振動板との接触側と反対側の主表面に超音波放出面が形成された音響インピーダンス整合層を、圧電セラミック振動板の第一主表面上に形成された接地電極と密着する形で設けることができる。音響インピーダンス整合層を圧電セラミック振動板に密着配置することで、該圧電セラミック振動板からの超音波の放射効率、あるいは圧電セラミック振動板による超音波の受信効率を高めることができる。 Further, the piezoelectric ceramic diaphragm can be disposed at a desired position in the opening opposite to the bottom of the casing. In this case, an acoustic impedance matching layer having an ultrasonic emission surface formed on the main surface opposite to the contact side with the piezoelectric ceramic diaphragm so as to close the opening is formed on the first main surface of the piezoelectric ceramic diaphragm. It can be provided in close contact with the formed ground electrode. By arranging the acoustic impedance matching layer in close contact with the piezoelectric ceramic diaphragm, it is possible to increase the radiation efficiency of ultrasonic waves from the piezoelectric ceramic diaphragm or the reception efficiency of ultrasonic waves by the piezoelectric ceramic diaphragm.
上記の構成において導通経路は、圧電セラミック振動板の第一主表面側にて一端が接地電極に半田付けされるワイヤとすることができる。この場合、音響インピーダンス整合層の該接地電極との対向面に、ワイヤの半田付け部を収容する凹状部を形成することで、圧電セラミック振動板と音響インピーダンス整合層との密着に伴なう、半田付け部と音響インピーダンス整合層との干渉を回避することができ、半田付け部を保護することができる。また、圧電セラミック振動板の第一主表面側に接地電極に導通するパッドを設ける必要がなくなり、駆動電極の面積を大きく確保することができる。 In the above configuration, the conduction path can be a wire whose one end is soldered to the ground electrode on the first main surface side of the piezoelectric ceramic diaphragm. In this case, by forming a concave portion that accommodates the soldered portion of the wire on the surface of the acoustic impedance matching layer that faces the ground electrode, accompanying the adhesion between the piezoelectric ceramic diaphragm and the acoustic impedance matching layer, Interference between the soldered portion and the acoustic impedance matching layer can be avoided, and the soldered portion can be protected. Further, it is not necessary to provide a pad conducting to the ground electrode on the first main surface side of the piezoelectric ceramic diaphragm, and a large area of the drive electrode can be secured.
これとは別の構成として、導通経路を、一端が接地電極に接続し、駆動電極及びモニタ用部分電極のいずれとも絶縁分離された形で圧電セラミック振動板の第一主表面に形成された接地用接続パッドに他端が接続する形で圧電セラミック振動板の周側面上に形成された接地用リード層と、一端が接地用接続パッドに半田付けされ他端が接地端子に半田付けされるワイヤとからなるものとして形成することもできる。このようにすると、圧電セラミック振動板の第一主表面側から接地用ワイヤの半田付け部を排除でき、接地電極の全面にわたって音響インピーダンス整合層を密着配置できるので、超音波の放射効率(あるいは超音波の受信効率)をさらに高めることができる。 As another configuration, the grounding path is formed on the first main surface of the piezoelectric ceramic diaphragm so that the conduction path is connected to the ground electrode at one end and insulated from both the drive electrode and the monitor partial electrode. A ground lead layer formed on the peripheral side surface of the piezoelectric ceramic diaphragm so that the other end is connected to the connection pad, and a wire having one end soldered to the ground connection pad and the other end soldered to the ground terminal Can also be formed. In this way, it eliminates soldering portions of the ground wires from the first main surface side of the piezoelectric ceramic diaphragm, it is possible to contact disposed an acoustic impedance matching layer over the entire surface of the ground electrode, ultrasonic radiation efficiency ( Alternatively, the reception efficiency of ultrasonic waves can be further increased.
また、さらに別な構成として、ケーシングは、該ケーシングの底部と、該底部の周縁から立ち上がる側壁部と、該側壁部の底部と反対側の開口を塞ぐ天面部とが互いに導通する金属部材にて形成することができる。この場合、天面部の内面に圧電セラミック振動板の第一主表面を覆う接地電極を、導電性接着層を介して密着配置し、当該ケーシングを介して接地電極を接地するように構成することができる。この構成により、ケーシングを駆動用の接地経路として流用でき、接地用の配線部を簡略化することができる。この場合、天面部の外側主表面に、当該天面部との接触側と反対側の主表面に超音波放出面が形成された音響インピーダンス整合層を密着配置することができ、超音波の放射効率(あるいは超音波の受信効率)を高めることができる。 As another configuration, the casing is made of a metal member in which a bottom portion of the casing, a side wall portion that rises from a peripheral edge of the bottom portion, and a top surface portion that closes an opening opposite to the bottom portion of the side wall portion are electrically connected to each other. Can be formed. In this case, the ground electrode that covers the first main surface of the piezoelectric ceramic diaphragm on the inner surface of the top surface portion may be disposed in close contact via the conductive adhesive layer, and the ground electrode may be grounded via the casing. it can. With this configuration, the casing can be used as a grounding path for driving, and the grounding wiring portion can be simplified. In this case, an acoustic impedance matching layer having an ultrasonic emission surface formed on the main surface opposite to the contact surface with the top surface portion can be disposed in close contact with the outer main surface of the top surface portion, and the radiation efficiency of the ultrasonic waves (Or ultrasonic reception efficiency) can be increased.
本発明の超音波出力素子の実施形態を、超音波流量計に適用した場合を例にとり、図面を参照しつつ説明する。図1は、一般住宅用ガスメータ等として用いられる超音波流量計の一実施例の基本構成である。この超音波流量計1には、被測定流体GFの流路を形成する流路形成部3と、流路形成部3に対し被測定流体GFの流通方向Oにおいて互いに異なる位置に設けられ、一方が被測定流体GFへの測定用超音波の送出側となり、他方が該測定用超音波の受信側となるように機能するとともに、各々測定用超音波として、予め定められた向きへの指向性を有する超音波ビームSWを送出可能な対をなす超音波送受信部2a,2bとを備えている。流路形成部3と超音波送受信部2a,2bとが流量計本体1Mを構成し、該流量計本体1Mと制御回路部1Eとにより超音波流量計1の全体が構成されている。
An embodiment of an ultrasonic output element of the present invention will be described with reference to the drawings, taking as an example a case where the ultrasonic output element is applied to an ultrasonic flowmeter. FIG. 1 shows the basic configuration of an embodiment of an ultrasonic flow meter used as a general residential gas meter or the like. The
流路形成部3は例えば金属製である。測定対象がガスの場合、流路形成部3の軸断面形状は壁部3Jにより閉鎖された空間を形成するものであればよく、例えば、円形状、楕円形状、正方形状、矩形状等のいずれを採用してもよい。本実施形態では、流路形成部3は矩形状の流路断面を有するものとして形成され、上壁部3Jaに上流側超音波送受信部2aが、また下壁部3jbに下流側超音波送受信部2bが取り付けられている。つまり、対をなす超音波送受信部2a,2bが流路を挟む形で振り分けて配置されている。
The flow
超音波送受信部2a,2bは超音波振動子を有した超音波トランスデューサである。いずれも、本発明の超音波出力素子として構成され、駆動電圧の印加により超音波ビームを送出する超音波送出機能と、超音波ビームの受信により電気信号(受信信号)を出力する超音波受信機能とを複合して備える。いずれも全く同一の構造を有するので、その一方で代表させて説明する(以下、符号「2」により代表させる)。
The ultrasonic transmission /
図2は、超音波送受信部2(超音波出力素子)の断面構造の一例を示すものである。超音波送受信部2は、その要部(振動駆動部)が、板厚方向に分極処理された圧電セラミック振動板21と、該圧電セラミック振動板21の各主表面を覆う形で該圧電セラミック振動板21を挟んで対向形成され、該圧電セラミック振動板21を超音波振動させるための駆動電圧が印加される主電極対22,23と、主電極対22,23のいずれとも絶縁分離した形で圧電セラミック振動板21上に形成され、駆動電圧の印加に伴い圧電セラミック振動板21に生ずる超音波振動の圧電モニタリング信号を取り出すためのモニタ用部分電極24とを備える。
FIG. 2 shows an example of a cross-sectional structure of the ultrasonic transmission / reception unit 2 (ultrasonic output element). The ultrasonic transmission /
圧電セラミック振動版21は、例えばチタン酸ジルコン酸鉛(PZT)、チタン酸バリウム、チタン酸鉛、チタン酸ジルコン酸ランタン鉛等のペロブスカイト型強誘電性セラミックにて構成されており、板厚方向に分極処理されている。また、各電極22,23,34はCu等の金属蒸着膜からなる。
The piezoelectric ceramic vibrating
主電極対22,23は、圧電セラミック振動板21の第一主表面を覆う接地電極22(GND側に接続される)と、同じく第二主表面を覆う駆動電極23(駆動電源側に接続される)とからなる。モニタ用部分電極24は、それら接地電極22及び駆動電極23のいずれよりも圧電セラミック振動板21に対する被覆面積を小さく形成されている。電極駆動電極23は接地電極22よりも圧電セラミック振動板21に対する被覆面積が小さく設定され、該圧電セラミック振動板21の第二主表面の駆動電極23に覆われていない残余領域にモニタ用部分電極24が形成される。
The
モニタ用部分電極24は、圧電セラミック振動板21の第二主表面の外周縁領域に形成されている。具体的には、圧電セラミック振動板21が円板状に形成され、駆動電極23は該圧電セラミック振動板21の外周縁に沿う円状の外周縁形状を有する。そして、当該円状の外周縁の一部を半径方向内側に凹状に引っ込ませる形で駆動電極23の一部を切り欠き、その切欠き領域23cの内側にモニタ用部分電極24が形成されている。駆動電極23側の外周縁は、モニタ用部分電極24との隣接位置にて、該駆動電極23とモニタ用部分電極24との間に所定幅の隙間20を形成する形で、該モニタ用部分電極24の外周縁に倣う形状に形成されている。なお、駆動電極23とモニタ用部分電極24との間に形成される隙間20の幅wは、0.5mm以上2.5mm以下に調整される。
The monitor
なお、モニタ用部分電極24の形成形態は上記したものに限られるものではなく、例えば、図12に示すように、駆動電極23を直線状の隙間20により切り欠いて、弓形のモニタ用部分電極24を形成することも可能である。
The form of formation of the monitor
また、圧電セラミック振動板21の分極処理は、図13に示すように、モニタ用部分電極24と駆動電極23とをパターニング形成し、これら電極に対応する形で絶縁分離された分極ブロック71,72と、接地電極22側の分極ブロックとの間に挟みつけて、分極用電源74から高圧の分極電圧を印加して行なうことができる。一方、図14に示すように、モニタ用部分電極24及び駆動電極23とを一体電極23Gとして形成し、一体電極23Gに対応した非分離の分極ブロック72と、接地電極22側の分極ブロックとの間に挟みつけて分極処理を行なった後、一体電極23Gをパターニングする方法を採用することも可能である。
Further, as shown in FIG. 13, the polarization processing of the piezoelectric
図2に戻り、圧電セラミック振動板21は、駆動電極23及びモニタ用部分電極24の形成された第二主表面側がケーシング29の底部28の内面と対向する形で該ケーシング29内に配置されている。ケーシング29の底部28の裏面には、駆動端子43及びモニタ端子44が突出形成され、駆動電極23及びモニタ用部分電極24がこれら駆動端子43及びモニタ端子44にそれぞれ接続されている。
Returning to FIG. 2, the piezoelectric
ケーシング29の側壁部30は、例えばステンレス鋼やアルミニウム合金など耐食性に優れる金属材料や、エンジニアリングプラスチック等で構成され、内周面底部側端部が段付き形状に拡径された形で裏面側開口部を形成している。そして、駆動端子43、接地端子41及びモニタ端子44を裏面側に立設した基板27が該裏面側開口部に嵌め込まれ、さらにエポキシ樹脂やシリコーン樹脂等の高分子材料が裏面側から充填されて底部28が形成されている。駆動端子43、接地端子41及びモニタ端子44は、該底部28を貫通して裏面側に延出している。
The
また、圧電セラミック振動板21は、ケーシング29の底部28と反対側の開口に望む位置に配置されている。そして、該開口を塞ぐ形で音響インピーダンス整合層25が、圧電セラミック振動板21の第一主表面上に形成された接地電極22と密着する形で設けられている。音響インピーダンス整合層25は、例えば、エポキシ樹脂などの樹脂材料をマトリックスとし、空隙形成用フィラー(例えば、ガラスバルーン)を分散させた複合材料により円板状に形成されてなり、圧電セラミック振動板21との接触側と反対側の主表面に超音波放出面が形成されている。超音波の伝達効率を向上させるために、該音響インピーダンス整合層25の空隙形成用フィラーの体積配合比率は、圧電セラミック振動板21と被測定流体(ここでは都市ガス)との中間の音響インピーダンス値(例えば、両者の幾何平均値を目標値とする)となるように調整されている。なお、目的とする音響インピーダンス値を得るために、空隙形成用フィラーを混入しない樹脂材料で音響整合層15を構成することもある。
The piezoelectric
次に、圧電セラミック振動板21とケーシング29の底部28との間には、シリコーン樹脂からなる絶縁層26が配置されている。駆動端子43と駆動電極23及びモニタ端子44とモニタ用部分電極24とは、該絶縁層26を貫く個別のワイヤ33,34によりそれぞれ半田付けによりボンディングされている。
Next, an insulating
また、接地電極22への導通経路31は、圧電セラミック振動板21の第二主表面側から該圧電セラミック振動板21の側周面を経て第一主表面側に回り込む形で形成されている。接地電極22は、ケーシング29の底部28の裏面に突出形成された接地端子41に対し、導通経路31を介して接続されている。図2において、該導通経路31は、圧電セラミック振動板21の第一主表面側にて一端が接地電極22に半田付けされるワイヤ31とされている。また、音響インピーダンス整合層25の該接地電極22との対向面には、ワイヤ31の半田付け部31sを収容する凹状部25cが形成されている。
Further, the
図1に戻り、制御回路部1Eには、前述の超音波駆動機構4と周辺回路ブロック7〜11が設けられている。超音波駆動機構4は、送信部5、受信部6及び切り替え部4sを有する。送信部5は、超音波送受信部2a,2bに対して駆動信号を入力するための回路である。受信部6はスイッチ等から構成され、このスイッチを切り替えることにより、前述の駆動モードの切り替えがなされる。この受信部6の切り替え制御は切り替え部4sにより行われる。増幅部7は、受信部6により受信された超音波を所定の増幅率で増幅し、ゼロクロスポイント検出部9に入力する。ゼロクロスポイント検出部9は、受信した超音波波形に含まれる特定順位波(例えば、第3波)のゼロクロスポイントを検出するものである。時間計測部10は、第一駆動モードでの、上流側超音波送受信部2aから発信された超音波ビームSWが下流側超音波送受信部2bに到達するまでの順方向伝播時間と、第二駆動モードにおける下流側超音波送受信部2bから発信された超音波ビームSWが上流側超音波送受信部2aに到達するまでの逆方向伝播時間とを計測するものである。また、演算部11は、上記の順方向伝播時間と逆方向伝播時間との時間差から、流路を流れる被測定流体の平均流速度及び流量を計算する。
Returning to FIG. 1, the ultrasonic drive mechanism 4 and the peripheral circuit blocks 7 to 11 are provided in the
図7を用いて既に説明したごとく、超音波送受信部2は、外部からの駆動信号を受けることで、その信号が圧電セラミック振動版にて機械振動に変換され、さらに音響インピーダンス整合層25を伝播して被測定流体へ放射されるので、上記の駆動信号の入力タイミングから超音波が被測定流体に放出されるまでに一定の遅延時間が存在する。そして、従来の流量計測(図7:(3))では、駆動信号の入力タイミングを超音波の被測定流体への放出タイミングと等価とみなし、これを超音波伝播時間の計測起点として用いていた。ところが、この計測方法では、超音波伝播時間に上記に遅延時間が計測誤差として含まれてしまうことは明らかであり、該遅延時間が、振動駆動部の経時劣化や、順方向計測時と逆方向計測時との間での、温度変化に対する非対象性などに伴い変動すると(図7:(1))、該遅延時間の、本来の超音波伝播時間(図7:(2))への誤差寄与率も変動し、超音波伝播時間の計測補正が不可能になってしまう問題がある。
As already described with reference to FIG. 7, the ultrasonic transmission /
しかし、上記本発明の超音波出力素子2の構成、すなわち、振動駆動部の要部をなす圧電セラミック振動板21に、駆動用の電極以外に、駆動電圧の印加に伴い当該の圧電セラミック振動板21に生ずる超音波振動の圧電モニタリング信号を取り出すためのモニタ用部分電極24を設けた構成を採用することで、駆動信号が入力された圧電セラミック振動板の振動波形をリアルタイムでモニタリングできる。
However, the configuration of the
すなわち、図7中に破線で示すごとく、駆動信号が入力された後、圧電セラミック振動板の遅延を含んだ形で、実際にいつ超音波振動が圧電セラミック振動板21に発生したかを、このモニタ用部分電極24の波形を監視することで知ることができる。従って、駆動信号の入力タイミングからモニタ用部分電極24の出力に振動波形が現われるまでの時間を計測すれば、駆動信号の入力タイミングから超音波の被測定流体への放出タイミングに至る遅延時間を把握できる。その結果、遅延時間が振動駆動部の経時劣化に伴い変動した場合でも、モニタ用部分電極24の出力監視により該遅延時間を特定することで、超音波伝播時間の測定基準を、超音波の被測定流体への実際の放出タイミングに近づけることができ(図7:(4))、計測誤差を減ずることができる。
That is, as indicated by a broken line in FIG. 7, when the drive signal is input, the time when the ultrasonic vibration is actually generated in the piezoelectric
図4は、図1の回路構成の詳細例を示すものである。2つの超音波送受信部2a,2bは、いずれも接地端子41a,41bが個別のスイッチSW3,SW4を介して接地ラインGNDに接続されている。接地ラインGNDはスイッチSW5を開始して接地導通とフロートとの間で切り替え可能になっている。一方、駆動端子43a,43bは、スイッチSW1,SW2により駆動入力ラインINPに、択一的に接続切り替え可能につながれている。また、モニタ端子44a,44bは、スイッチSW8,SW9によりモニタラインMNTに、択一的に接続切り替え可能につながれている。さらに、駆動入力ラインINPとモニタラインMNTとは、増幅部7に対し、スイッチSW6,SW7により択一的に接続切り替え可能につながれている。
FIG. 4 shows a detailed example of the circuit configuration of FIG. In each of the two ultrasonic transmission /
なお、駆動入力ラインINP上には、並列の双方向ダイオード対からなるインピーダンス変換用のブートストラップ回路51が設けられている。また、モニタラインMNTと接地ラインGNDとの間には、並列の双方向ダイオード対からなる過電圧保護回路52が配置されている。さらに、駆動入力ラインINP上と接地ラインGNDとの間には、耐ノイズ性向上と駆動入力電圧安定化を図るための抵抗R2が挿入されている。また、モニタラインMNT上には、増幅部7への入力インピーダンス調整用の抵抗R1が挿入されている。増幅部7は、入力上段側から、圧電セラミック振動板に生ずる電荷量変化を電圧変換するチャージアンプ71と、該チャージアンプ71の出力電圧を反転増幅する反転増幅部72とを有する。
On the drive input line INP, a
図5は、ゼロクロスコンパレータ部9の回路構成例を示すものであり、増幅部7の波形出力の入力信号は、該入力信号をGND基準で方形波化する第一コンパレータ91と、同じく下限振幅(振幅下限値Vs)を規制しつつ方形波化する第二コンパレータ92とに分配入力される。第一コンパレータ91の出力は、セットリセットフリップフロップ(RSFF)回路93のセット端子に、第二コンパレータ92の出力は同じくリセット端子に入力され、該セットリセットフリップフロップ(RSFF)回路93の出力変化エッジをトリガとする形で、単安定回路にて構成されたゼロクロスポイントパルス発生回路94が、増幅部7からの入力波形のうち振幅Vsを超える半波によるゼロクロスポイントに対応したパルス波形を出力する。このパルス波形は、クロックパルス発生回路96からのクロック入力と同期して動作するパルスカウンタ回路95にて計測され、規定数のパルス入力を計数することにより伝播時間の検出信号を出力する。
FIG. 5 shows an example of the circuit configuration of the zero
図6は、各部の動作シーケンスを示すタイミング図である。駆動パルス入力により励起された振動波形の増幅出力(Va)は、第一コンパレータ91により方形波化される一方(Vb1)第二コンパレータ92は、振幅Vsを閾値とした反転波形にて上記振動波形を方形化する。これにより、第一コンパレータ91の方形波出力は、振幅Vsを超える半波が入力された場合にのみRSFF回路93によりラッチされ、ゼロクロスポイントパルス発生回路94へのパルス出力トリガとなる入力エッジを生ずる。本実施形態では、振幅が漸増する初期振動波形の所定順位波のゼロクロスポイント(ここでは、第二正半波のゼロクロスポイント(つまり、波形開始点から3番目のゼロクロスポイント)から認識されるように、第二コンパレータ92の振幅閾値が定められている。
FIG. 6 is a timing chart showing an operation sequence of each unit. The amplified output (Va) of the vibration waveform excited by the drive pulse input is square-waved by the first comparator 91 (Vb1), while the
図4の回路は、以下のように動作する(スイッチの繰り替え駆動は、図1の演算部11(マイクロコンピュータで構成される)が所定の制御プログラムを実行することにより行なわれる)。まず、上流側超音波送受信部2aに駆動信号パルスが入力される。このとき、SW1,SW7,SW8がONとなり、SW3,4,5もONとなる。他方、SW2,SW6,SW9はOFFとなる。これにより、上流側超音波送受信部2aは駆動端子43aにて振動励起され、前述の遅延時間を経てモニタ端子44aに駆動モニタ波形が現われる。この波形は、モニタラインMNT(SW7)を経て増幅部7からゼロクロスコンパレータ9に入力され、前述のごとく、所定順位波のゼロクロスポイントが特定され、伝播時間検出信号が時間計測回路10に出力される。時間計測回路10は、駆動信号の入力タイミングを起点として、モニタ波形の上記ゼロクロスポイントまでの時間t0(図7)を測定する。
The circuit of FIG. 4 operates as follows (switch switching driving is performed by the calculation unit 11 (configured by a microcomputer) of FIG. 1 executing a predetermined control program). First, a drive signal pulse is input to the upstream ultrasonic transmission /
上流側超音波送受信部2aからは上記駆動入力に基づく超音波が被測定媒体中に放出されているので、この波形が下流側超音波送受信部2bに到達するまでの間に、SW7,SW8をOFFとして、SW2,SW6をONとする切り替えを行なう(SW1,3,4,5はON状態を.SW9はOFF状態を継続する)。これにより、下流側超音波送受信部2bの受信波形が駆動ラインMNT(SW6)を経て増幅部7からゼロクロスコンパレータ9に入力され、所定順位波のゼロクロスポイントが特定され、伝播時間検出信号が時間計測回路10に出力される。時間計測回路10は、駆動信号の入力タイミングを起点として、受信波形の上記ゼロクロスポイントまでの時間tx(図7)を測定する。これにより、最終的な順方向伝播時間をtx−t0として算出できる。
Since the ultrasonic wave based on the driving input is emitted from the upstream ultrasonic transmission /
続いて、上流側超音波送受信部2aと下流側超音波送受信部2bとの送受信関係を入れ替えて同様の測定が行なわれる。すなわち、下流側超音波送受信部2bに駆動信号パルスを入力するため、SW2,SW7,SW9がONとなり、SW3,4,5もONとなる。他方、SW1,SW6,SW8はOFFとなる。これにより、下流側超音波送受信部2bは駆動端子43bにて振動励起され、前述と同様に所定順位波のゼロクロスポイントが特定され、伝播時間検出信号が時間計測回路10に出力される。時間計測回路10は、駆動信号の入力タイミングを起点として、モニタ波形の上記ゼロクロスポイントまでの時間t0’を測定する。次に、SW7,SW9をOFFとして、SW1,SW2,SW6をONとする切り替えを行なう(SW2,3,4,5はON状態を.SW8はOFF状態を継続する)。これにより、上流側超音波送受信部2aの受信波形のゼロクロスポイントが特定され、伝播時間検出信号が時間計測回路10に出力される。時間計測回路10は、駆動信号の入力タイミングを起点として、受信波形の上記ゼロクロスポイントまでの時間tx’を測定する。これにより、最終的な逆方向伝播時間をtx’−t0’として算出できる。そして、前述の順方向伝播時間tx−t0を合わせ用いて、周知の方法にて流速(あるいは流量)を算出することができる。
Subsequently, the same measurement is performed by exchanging the transmission / reception relationship between the upstream ultrasonic transmission /
以下、上記本発明の種々の変形例について説明する。
図3Aの実施形態では駆動パルスは1個のみ入力していたが、駆動波形の均一化及び安定化のために、図3Bに示すように、複数個の駆動パルスを連続して入力するようにしてもよい。
Hereinafter, various modifications of the present invention will be described.
In the embodiment of FIG. 3A, only one drive pulse is input. However, in order to equalize and stabilize the drive waveform, a plurality of drive pulses are continuously input as shown in FIG. 3B. May be.
また、図8に示すように、駆動端子43にモニタ端子を統合し、駆動電極23とモニタ部分電極25とを、導通接続/絶縁分離との間で切り替えるスイッチSW10を設けることも可能である。この構成では、駆動入力時には駆動電極23とモニタ部分電極25とが導通接続されるようにスイッチSW10を駆動切り替えすることで、モニタ部分電極25も駆動電圧の印加を担うことができ、圧電セラミック振動板21への駆動電圧印加をより均一に行なうことができる。駆動後は直ちにスイッチSW10を切り替えることで、駆動電極23とモニタ部分電極25とを絶縁分離でき、モニタ部分電極25を介して圧電セラミック振動板21の振動波形をより明確にモニタリングできる。図9は、この場合の回路構成例である。図4のスイッチSW8,9は省略されており、駆動ラインINPの一部がモニタラインMNTに共用化されている。
Further, as shown in FIG. 8, it is also possible to provide a switch SW10 that integrates the monitor terminal with the
上流側超音波送受信部2aに駆動信号パルスが入力される場合は、SW1,SW7,SW10がONとなり、SW3,4,5もONとなる。他方、SW2,SW6,SW11はOFFとなる。受信時は、SW7,SW1,SW10をOFFとして、SW2,SW6,SW11をONとする切り替えを行なう。また、流側超音波送受信部2bに駆動信号パルスが入力される場合は、SW2,SW7,SW11がONとなり、SW3,4,5もONとなる。他方、SW1,SW6はOFFとなる。受信時は、SW7,SW2,SW11をOFFとして、SW1,SW6,SW10をONとする切り替えを行なう(SW3,4,5はON状態を継続する)。
When a drive signal pulse is input to the upstream ultrasonic transmitting / receiving
図10の構成では、接地用の配線部を、一端が接地電極22に接続し、駆動電極23及びモニタ用部分電極24のいずれとも絶縁分離された形で圧電セラミック振動板21の第一主表面に形成された接地用接続パッド3pに他端が接続する形で圧電セラミック振動板21の周側面上に形成された接地用リード層31aと、一端が接地用接続パッド3pに半田付けされ他端が接地端子41に半田付けされるワイヤ31bとからなるものとして形成している。なお、接地用接続パッド3pとモニタ用部分電極24とは、駆動電極22による振動駆動分布の幾何学的バランスを考慮して、圧電セラミック振動板21の第一主表面の中心(幾何学的重心)位置に関してほぼ点対称の位置関係にて配置されている。
In the configuration of FIG. 10, the first main surface of the piezoelectric
また、図11の構成においては、ケーシング29が、底部28と、該底部28の周縁から立ち上がる側壁部30と、該側壁部30の底部28と反対側の開口を塞ぐ天面部29tとが互いに導通する金属部材にて形成することができる。天面部29tの内面には、圧電セラミック振動板21の第一主表面を覆う接地電極22が導電性接着層46を介して密着配置され、ケーシング29を介して接地電極22が接地されるようになっている。また、天面部29tの外側主表面には、当該天面部29tとの接触側と反対側の主表面に超音波放出面が形成された音響インピーダンス整合層25が密着配置されている。側壁部30の内周面にはゴム製の絶縁リングが嵌め込まれ、圧電セラミック振動板21と底部28との間の空隙はシリコーン系等のゲル状高分子材料により充填されている。なお接地端子41は底部28に一体化される形で突出形成されている。
In the configuration of FIG. 11, the
3p 接地用接続パッド
20 隙間
21 圧電セラミック振動板
22,23 主電極対
22 接地電極
23c 切欠き領域
24 モニタ用部分電極
25 音響インピーダンス整合層
25c 凹状部
26 絶縁層
28 底部
29 ケーシング
29t 天面部
30 側壁部
31 ワイヤ(導通経路)
31b ワイヤ
31a 接地用リード層
31s 半田付け部
41 接地端子
43 駆動端子
46 導電性接着層
3p
Claims (15)
該圧電セラミック振動板の各主表面を覆う形で該圧電セラミック振動板を挟んで対向形成され、該圧電セラミック振動板を超音波振動させるための駆動電圧が印加される主電極対と、
前記主電極対のいずれとも絶縁分離した形で前記圧電セラミック振動板上に形成され、前記駆動電圧の印加に伴い前記圧電セラミック振動板に生ずる超音波振動の圧電モニタリング信号を取り出すためのモニタ用部分電極と、
を備え、
前記駆動電圧の電源ラインと前記圧電モニタリング信号の出力ラインとのいずれかに前記モニタ用部分電極を切替可能に接続する切替スイッチが設けられ、
前記モニタ用部分電極を前記電源ラインに接続することにより、前記駆動電圧を前記主電極対とともに該モニタ用部分電極にも印加し、その後前記切替スイッチを前記圧電モニタリング信号の出力ライン側に切り替えて、前記圧電モニタリング信号を取り出すことを特徴とする超音波出力素子。 A piezoelectric ceramic diaphragm polarized in the plate thickness direction;
A main electrode pair formed so as to oppose the piezoelectric ceramic diaphragm so as to cover each main surface of the piezoelectric ceramic diaphragm, and to which a driving voltage for ultrasonically vibrating the piezoelectric ceramic diaphragm is applied;
A monitoring portion formed on the piezoelectric ceramic diaphragm so as to be insulated and separated from any of the main electrode pairs, and for extracting a piezoelectric monitoring signal of ultrasonic vibration generated in the piezoelectric ceramic diaphragm upon application of the drive voltage Electrodes,
Equipped with a,
There is provided a changeover switch for connecting the partial electrode for monitoring to either the power supply line of the driving voltage or the output line of the piezoelectric monitoring signal,
By connecting the monitoring partial electrode to the power supply line, the drive voltage is applied to the monitoring partial electrode together with the main electrode pair, and then the changeover switch is switched to the output line side of the piezoelectric monitoring signal. An ultrasonic output element that extracts the piezoelectric monitoring signal .
前記ケーシングの底部裏面に突出形成された駆動端子及びモニタ端子に対し、前記駆動電極及び前記モニタ用部分電極がそれぞれ接続されている請求項2ないし請求項7のいずれか1項に記載の超音波出力素子。 The piezoelectric ceramic diaphragm is disposed in the casing such that the second main surface side on which the drive electrode and the partial electrode for monitoring are formed faces the inner surface of the bottom of the casing,
To the bottom drive terminal and the monitor terminal is protruded on the back surface of the casing, ultrasound according to any one of claims 2 to 7 wherein the drive electrode and the monitor portion electrodes are respectively connected Output element.
前記接地電極の全面にわたって前記音響インピーダンス整合層が密着配置されている請求項11に記載の超音波出力素子。 One end of the conduction path is connected to the ground electrode, and the ground connection pad is formed on the first main surface of the piezoelectric ceramic diaphragm so as to be insulated from both the drive electrode and the monitor partial electrode. The other end of the piezoelectric ceramic diaphragm is connected to the ground lead layer formed on the peripheral side surface, one end is soldered to the ground connection pad, and the other end is soldered to the ground terminal. Consisting of wires,
Ultrasonic output device according to claim 11, wherein the acoustic impedance matching layer over the entire surface of the ground electrode is disposed in close contact.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006354917A JP5111846B2 (en) | 2006-12-28 | 2006-12-28 | Ultrasonic output element |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006354917A JP5111846B2 (en) | 2006-12-28 | 2006-12-28 | Ultrasonic output element |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008164464A JP2008164464A (en) | 2008-07-17 |
| JP5111846B2 true JP5111846B2 (en) | 2013-01-09 |
Family
ID=39694166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006354917A Expired - Fee Related JP5111846B2 (en) | 2006-12-28 | 2006-12-28 | Ultrasonic output element |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5111846B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6805630B2 (en) | 2016-08-24 | 2020-12-23 | セイコーエプソン株式会社 | Ultrasonic devices, ultrasonic modules, and ultrasonic measuring devices |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5822039A (en) * | 1981-07-31 | 1983-02-09 | 株式会社島津製作所 | Ultrasonic vibrator |
| JP2893361B2 (en) * | 1991-07-31 | 1999-05-17 | 日本電波工業株式会社 | Piezoelectric plate for probe and ultrasonic probe using the same |
| JPH0989616A (en) * | 1995-09-20 | 1997-04-04 | Tokico Ltd | Ultrasonic flowmeter |
| JP4193582B2 (en) * | 2003-05-21 | 2008-12-10 | 株式会社村田製作所 | Ultrasonic sensor |
| JP2005345445A (en) * | 2004-06-07 | 2005-12-15 | Ricoh Elemex Corp | Ultrasonic flowmeter |
-
2006
- 2006-12-28 JP JP2006354917A patent/JP5111846B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008164464A (en) | 2008-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5111847B2 (en) | Ultrasonic flow meter | |
| WO2012164879A1 (en) | Ultrasonic transducer and ultrasonic flow-meter | |
| JP2918102B2 (en) | Ultrasonic transducer | |
| KR100359981B1 (en) | Ultrasonic transducer and ultrasonic flowmeter | |
| JP6172533B2 (en) | Ultrasonic transducer and ultrasonic flow meter having the same | |
| JP6552644B2 (en) | Impedance matching layer for ultrasonic transducers with metallic protective structure | |
| US11426764B2 (en) | Ultrasound transducer | |
| JP2008096359A (en) | Sensor | |
| JP5111846B2 (en) | Ultrasonic output element | |
| JPH10224895A (en) | Ultrasonic sensor | |
| JP4582011B2 (en) | Ultrasonic flow meter | |
| JP3518268B2 (en) | Ultrasonic flow meter | |
| JP2009004916A (en) | Ultrasonic output device | |
| JP4586604B2 (en) | Ultrasonic transceiver | |
| JP2005345445A (en) | Ultrasonic flowmeter | |
| JP5533332B2 (en) | Ultrasonic flow meter | |
| JPS584075A (en) | Piezoelectric transformer for ultrasonic folw meter | |
| JP4079075B2 (en) | Ultrasonic transducer and ultrasonic flowmeter | |
| JP2004286763A (en) | Ultrasonic transducer and ultrasonic flow measuring instrument | |
| JP2003270012A (en) | Ultrasonic transducer and ultrasonic flowmeter | |
| US20200191627A1 (en) | Measuring device for determining a fluid variable | |
| US9618372B2 (en) | Transit time flow meter probe | |
| JP4513490B2 (en) | Ultrasonic transducer and ultrasonic flowmeter | |
| CN112005107A (en) | Sensor device for determining the electrical conductivity of a fluid and the speed of sound in a fluid | |
| JPH03103786A (en) | Ultrasonic probe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101004 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121009 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121010 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5111846 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |