実施の形態1.
(レンダリング画像は予め作成しておいたものを記憶部に格納)
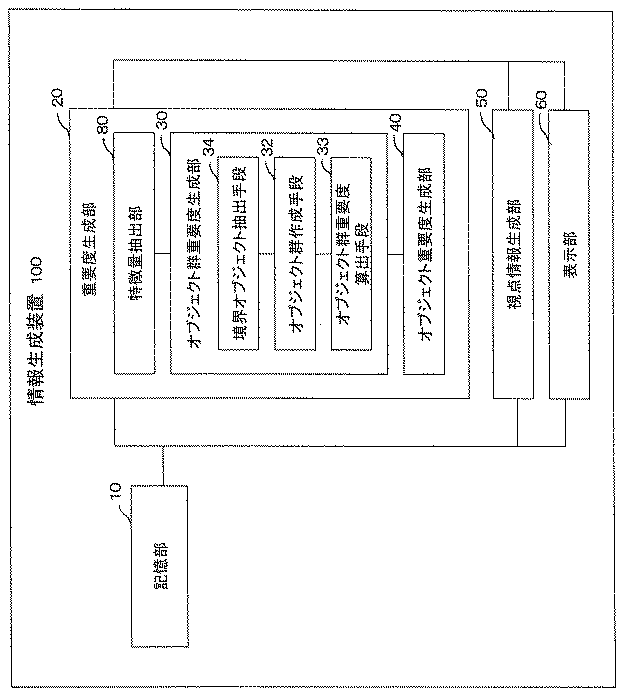
図1は、この発明の実施の形態1に係る情報生成装置の構成を示すブロック図である。
図1に示す情報生成装置100は、コンピュータグラフィックスを用いた3次元表示において、描画データを選択する際に、膨大な量の3次元モデルの中から、表示に必要な3次元モデルのデータを選択抽出可能とするための重要度を生成する情報生成装置であって、道路や建物等のオブジェクトの3次元データや画像、画像に関する特徴量等を記憶する記憶部10と、3次元形状データやテクスチャデータ、色情報、属性情報等、3次元モデルに関するデータを用いて、各オブジェクトや複数のオブジェクトをまとめたまとまりに設定する重要度を3次元空間内の方向と対応付けて算出する重要度生成部20とで構成される。
重要度生成部20は、複数のオブジェクトをまとめたまとまり(以下、オブジェクト群と表記)を作成し、オブジェクト群に対して重要度を算出するオブジェクト群重要度生成部30と、オブジェクトのポリゴンに対する重要度を算出するオブジェクト重要度生成部40とを備えている。
ここで、オブジェクト群重要度生成部30は、記憶部10に格納されている画像を用いて、表示におけるシルエットとなるオブジェクトを抽出する画像解析手段31と、遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際に視線方向遠方側に存在するシルエットオブジェクト(シルエットとなるオブジェクト)に分類(遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際にシルエットオブジェクトが非シルエットオブジェクトよりも遠方側となるように分類)して、シルエットオブジェクトを基本とした、複数個のオブジェクトからなるオブジェクトのまとまり(オブジェクト群)を作成するオブジェクト群作成手段32と、前記オブジェクト群作成手段32において作成した各オブジェクト群に関して、画素数等の特徴量を用いて可視性に基づく重要度を算出するオブジェクト群重要度算出手段33とを備えている。
次に、道路や建物等から成る都市空間を対象として動作について説明する。
記憶部10は、道路や建物等から成る都市の3次元形状データの他、建物の3次元モデルを表示した3次元空間内で主要な道路上を視点移動した際の表示結果(レンダリング画像等)を複数枚記憶している。この時、各レンダリング画像は、レンダリング画像生成時の視点情報(視点位置や視線方向)と対応付けて記憶されている。
オブジェクト群重要度生成部30における画像解析手段31では、記憶部10に格納されているレンダリング画像を用いて、景観におけるシルエットとなる建物(以下、境界建物と表記)を抽出する。境界建物は、レンダリング画像上で空に接する建物として抽出することが出来る。この時、画像中のすべての領域を対象としてもよいし、画像中の特定の領域を対象としてもよい。また、複数の領域を設定しても良い。特定領域において境界建物を抽出する例を図2に示す。この場合、境界建物は、建物Aと建物Bとなる。エッジ抽出等の画像処理を用いて、境界建物を抽出することが出来る。なお、3次元空間内で道路上等を視点移動した際の時系列画像を用いる場合、境界建物を抽出するための領域を全時系列画像で統一してもよいし、各々の画像で別の領域を対象としてもよい。抽出した境界建物は、オブジェクト群作成手段32に渡す。
オブジェクト群作成手段32では、前記画像解析手段31から景観のシルエットとなる建物(境界建物)を受け取ると、遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際に視線方向遠方側に存在するシルエットオブジェクト(シルエットとなるオブジェクト)に分類し(遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際にシルエットオブジェクトが遠方側となるように分類し)、シルエットオブジェクトを基本とした、複数個のオブジェクトからなるオブジェクトのまとまり(オブジェクト群)を作成する。
以下では、このまとまりを「建物群」と呼ぶ。前記画像解析手段31において非抽出である建物(以下、非境界建物と表記)に関して、オブジェクト群作成手段32では、各建物に最も近い境界建物を見つけ、この境界建物に非境界建物を分類することで建物群を作成する。非境界建物を境界建物に分類する際には、境界建物の抽出に使用する画像作成時の視点移動において、非境界建物よりも移動方向に対して遠方側に位置する境界建物に分類する。その例を図3に示す。図3において、建物A、建物Bは境界建物であり、建物C、建物Dは非境界建物である。画像作成時の視点移動方向が、図3において画像手前から奥方向である場合、非境界建物C、Dは、移動方向に対して遠方側、すなわち、建物Bに分類する。この結果、建物B、C、Dを同一建物群が作成される。作成した建物群は、オブジェクト群重要度算出手段33に渡す。
オブジェクト群重要度算出手段33では、前記オブジェクト群作成手段32において作成した各建物群に関して、遠方からの視認性評価に基づく重要度を算出する。重要度は、建物群毎(複数の建物をまとめたまとまり毎)に算出する。具体的には、各建物群を遠方から表示した際の建物群ごとの表示画素数を求め、遠方から表示した際に一定値以上の大きさで表示される3次元空間内の位置を建物群毎に求める。この位置を用いて、遠方からでも大きく表示される建物群ほど重要度の数値が大となるように、建物群毎の重要度を算出する。算出した重要度は、算出時に利用したレンダリング画像作成時の視点移動方向と対応付けて記憶部10に格納する。以下では、建物群に対して算出した重要度を「建物群重要度」と呼ぶ。
オブジェクト重要度生成部40では、オブジェクトのポリゴンに対する重要度を算出する。重要度は、3次元モデルの可視性評価に基づく方法と、それ以外の方法で決定する。可視性評価に基づく決定方法では、記憶部10に格納されているレンダリング画像、または、特徴量を取得して、ポリゴンに設定する重要度を算出する。このとき、算出する重要度は、建物の3次元モデルを表示した際の可視性に基づいて決めた景観再現上の重要性であり、例えば、ウォークスルー表示において画面上で大きく表示される建物は重要度の値を大きくし、画面上で小さく表示される建物は重要度の値を小さくする。重要度は、画面上で表示される大きさに基づいて決める方法に限らない。
以上において、表示される大きさ等の特徴量は、記憶部10に格納されているレンダリング画像を用いて抽出するか、あるいは、記憶部10に格納されている特徴量を用いる。
一方、可視性評価以外の方法で決定する場合、建物の形状データや属性データ、色情報等を用いて重要度を算出する。例えば、高い建物や、色彩が目立つ建物、形状が複雑で目立つ建物等には高い重要度を設定する。
また、ランドマークやコンビニエンスストア、銀行、曲がり角の建物等、歩行者ナビゲーションにおいて目印となる建物のポリゴンに高い重要度を設定してもよい。
なお、重要度の設定においては、同一ポリゴンに対して、3次元空間内における方向に応じた複数種類の重要度を設定することができる。例えば、同一のランドマークでも、或る方向から見た場合には目立つが別の方向から見た場合には目立たない場合があり、このようなときに、方向と対応付けた複数種類の重要度を設定することができる。
算出した重要度は、3次元空間内における方向と対応付けて記録部10に格納する。
以下では、建物に対して算出した重要度を「建物重要度」と呼ぶ。
このようにして、複数のオブジェクトをまとめたまとまり、オブジェクトのポリゴンに対して重要度を数値化して生成できる。
上述した実施の形態1では、建物群の重要度を算出する際に、各建物群が遠方から大きく表示される位置を利用する例を示しているが、遠方からの視認性評価に基づく建物群重要度の算出方法は、位置を利用する方法に限らない。例えば、最大表示画素数等を用いて算出してもよい。
また、実施の形態1では、重要度を算出する対象として、建物及び、建物をまとめた建物群を対象とした例を示したが、建物以外のオブジェクトに対しても同様に重要度を算出することができる。
また、実施の形態1では、道路上を視点移動した際のレンダリング画像を用いて重要度を算出する方法を示したが、3次元空間内における視点移動は道路上に限らず、任意である。同様に、シルエットとなるオブジェクトの検出は、道路上を移動した際の画像からの抽出に限定しない。すなわち、上空を移動した際の画像からシルエットとなるオブジェクトを抽出してもよい。
さらに、実施の形態1では、レンダリング画像を用いる実施の形態であるが、道路上を移動しながら撮影した時系列画像等、他の画像を用いても良い。
以上のように、実施の形態1に係る情報生成装置100では、景観のシルエットとなる建物に基づいてシルエットとなる建物の付近の建物を視線方向からの見え方に基づいてまとめ、まとめたまとまり(建物群)毎に遠方からの視認性評価に基づく重要度を予め算出することが出来、また、建物のポリゴンに対しても予め重要度を算出することができるので、3次元モデルの配信や表示を行う際に、端末における視点の移動に伴ってその都度、視認性評価等を行って重要度を算出する必要がなく、端末ではオブジェクトを高速に表示することができる。
また、シルエットとなる景観に基づいて複数の建物をまとめた建物群毎に重要度を設定することができるので、建物群の重要度を用いることで、表示するオブジェクトを広範囲の3次元空間の中から抽出する際に、景観のシルエットを欠落させることなく、オブジェクトを抽出することができる。このため、歩行者ナビゲーション等を行う際に、現在地周辺の様子や位置関係の把握に必要なオブジェクトのデータを効率的に取得できる。
また、遠方からの視認性評価に基づいてオブジェクト群に対する重要度を算出することが出来るので、携帯電話のように画面サイズが小さい場合でも不要に多数のオブジェクトを表示させることを回避できる。このため、データ伝送時間、描画時間を短縮化できる。
実施の形態2.
(ウォークスルーでレンダリング画像を生成。視点情報はリアルタイムに生成)
図4は、この発明の実施の形態2に係る情報生成装置の構成を示すブロック図である。
図4に示す情報生成装置100は、コンピュータグラフィックスを用いた3次元表示において、描画データを選択する際に、膨大な量の3次元モデルの中から表示に必要な3次元モデルのデータを選択抽出可能とするための重要度を生成する情報生成装置であって、3次元モデルのデータを格納する記憶部10と、オブジェクトから離れた視点位置からオブジェクトを見た際に、表示上のシルエットとなるオブジェクトに基づいて、複数のオブジェクトをまとめたまとまりを生成し、まとまりから離れた視点位置からまとまりを見た際の視認性評価に基づいてまとまりに対する重要度を算出するオブジェクト群重要度生成部30と、オブジェクトのポリゴンに対する重要度を算出するオブジェクト重要度生成部40と、3次元空間内における視点位置や視線方向等、視点に関する情報を生成する視点情報生成部50と、建物や道路等のオブジェクトの3次元モデルをレンダリングして表示する表示部60と、3次元モデルをレンダリングした結果を画像に出力し、記憶部10に格納する画像生成部70とを備えている。
ここで、記憶部10、重要度生成部20におけるオブジェクト重要度生成部30の各処理内容は実施の形態1と同様であり、重要度生成部20におけるオブジェクト群重要度生成部30の構成及び各手段の処理内容は、実施の形態1と同様である。
次に、実施の形態1と同様に、道路や建物等から成る都市空間を対象として動作について説明する。
まず、操作員がマウスやキーボード等により、視点の位置や視線方向、視点の移動方向や1秒あたりの移動変位量等を入力すると、入力された情報に基づいて視点情報生成部50が視点に関する情報を生成する。表示部60では、前記視点情報生成部50が取得した視点位置と方向に基づいて、3次元モデルをレンダリングし、表示する。表示が完了すると、画像生成部70にメッセージを送る。レンダリングの処理内容は、世の中一般のレンダリングと同様である。
画像生成部70では、前記表示部60からメッセージを受け取ると、3次元モデルをレンダリングした結果を画像に出力し、記憶部10に格納する。なお、レンダリング画像の生成は、予め決めておいた時間間隔ごとや、予め決めておいたフレームごとに行っても良い。画像ファイルは、3次元空間内における位置や方向と関連付けて蓄積する。
オブジェクト群重要度生成部30は、実施の形態1と同様に、画像解析手段31、オブジェクト群作成手段32、オブジェクト群重要度算出手段33から構成される。画像解析手段31では、記憶部10に格納されている画像を用いて、境界建物を抽出する。画像生成部70が作成して格納したレンダリング画像も使用することが出来る。具体的な動作は、実施の形態1と同様である。
オブジェクト群作成手段32では、遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際に視線方向側に存在するシルエットオブジェクト(シルエットとなるオブジェクト)に分類し(遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際にシルエットオブジェクトが遠方側となるように分類し)、シルエットオブジェクトを基本とした、複数個のオブジェクトからなるオブジェクトのまとまり(オブジェクト群)を作成する。具体的な動作は実施の形態1と同様である。
オブジェクト群重要度算出手段33では、前記オブジェクト群作成手段32において作成した各建物群に関して、遠方からの視認性評価に基づく重要度を算出する。重要度は、建物群毎(複数の建物をまとめたまとまり毎)に算出する。具体的な動作は実施の形態1と同様である。
この実施の形態2は、視点情報生成部50において視点に関する情報を生成する実施の形態であるが、視点情報生成部50を除く構成とし、事前に作成しておいた視点に関する情報を記憶部10から取得する構成としてもよい。例えば、視点位置や視線方向の時系列データを予め記憶部10に記憶しておき、そのデータに基づいて自動的に視点を移動させながら画像を生成してもよい。また、道路ネットワークデータ等を用いて視点を移動させる経路の座標を取得してもよい。
以上のように、実施の形態2に係る情報生成装置100では、3次元空間内で任意の視点移動を行いながらレンダリング画像を生成できるので、3次元空間内の任意の視点から遠方からの視認性評価を行うことができ、この視認性評価に基づき、複数のオブジェクトをまとめたオブジェクト群に対する重要度を事前に算出することが出来る。
実施の形態3.
(ウォークスルーで画像を生成せずに、特徴量を抽出)
図5は、この発明の実施の形態3に係る情報生成装置の構成を示すブロック図である。
図5に示す情報生成装置100は、コンピュータグラフィックスを用いた3次元表示において、描画データを選択する際に、膨大な量の3次元モデルの中から、表示に必要な3次元モデルのデータを選択抽出可能とするための重要度を生成する情報生成装置であって、3次元モデルのデータを格納する記憶部10と、オブジェクト群やオブジェクトのポリゴンに対して重要度を算出する際に用いる特徴量を、3次元モデルをレンダリングした結果から抽出し、記憶部10に格納する特徴量抽出部80と、オブジェクトから離れた視点位置からオブジェクトを見た際に、表示上のシルエットとなるオブジェクトに基づいて、複数のオブジェクトをまとめたまとまりを生成し、まとまりから離れた視点位置からまとまりを見た際の視認性評価に基づいてまとまりに対する重要度を算出するオブジェクト群重要度生成部30と、オブジェクトのポリゴンに対する重要度を算出するオブジェクト重要度生成部40と、3次元空間内における視点位置や視線方向等、視点に関する情報を生成する視点情報生成部50と、オブジェクトの3次元モデルをレンダリングして表示する表示部60とを備えている。
ここで、オブジェクト群重要度生成部30は、表示においてシルエットとなるオブジェクトを抽出する境界オブジェクト抽出手段34と、遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際に視線方向遠方側に存在するシルエットオブジェクト(シルエットとなるオブジェクト)に分類し(遠方から表示した際にシルエットとならないオブジェクトを、その視線方向で表示した際にシルエットオブジェクトが遠方側となるように分類し)、シルエットオブジェクトを基本とした、複数個のオブジェクトからなるオブジェクトのまとまり(オブジェクト群)を作成するオブジェクト群作成手段32と、前記オブジェクト群作成手段32において作成した各オブジェクト群に対して、遠方からの視認性評価に基づく重要度を算出するオブジェクト群重要度算出手段33とを備えており、オブジェクト群作成手段32、オブジェクト群重要度算出手段33の各手段の処理内容は実施の形態1と同様である。また、記憶部10、視点情報生成部50、表示部60の各処理内容は、実施の形態2と同様である。
次に、都市モデルを対象として動作について説明する。
まず、視点情報生成部50では、操作員がマウスやキーボード等を用いて視点の位置や視線方向、視点の移動方向や1秒あたりの移動変位量等を入力すると、入力された情報に基づいて視点に関する情報を生成する。
表示部60では、前記視点情報生成部50が生成した視点位置と方向に基づいて、3次元モデルをレンダリングし、表示する。レンダリングの処理内容は、世の中一般のレンダリングと同様である。表示が完了すると、特徴量抽出部80にメッセージを送る。
特徴量抽出部80では、前記表示部60からメッセージを受け取ると、レンダリング結果に基づいて画素数等の特徴量を抽出し、記憶部10に格納する。特徴量は、境界建物の抽出や、建物群及び建物に対して設定する重要度の算出に必要な特徴量である。
オブジェクト群重要度生成部30において、境界オブジェクト抽出手段34では、建物の3次元モデルをレンダリングした際の各種特徴量(各オブジェクトの表示位置や表示画素数等)や境界オブジェクトを検出する領域を記憶部10から取得し、シルエットとなる建物を検出する。検出方法は、実施の形態1と同様である。
オブジェクト群作成手段32、オブジェクト群重要度算出手段33、オブジェクト重要度生成部40の各処理内容は、実施の形態1と同様である。
以上のように、実施の形態3に係る情報生成装置100では、複数の建物をまとめた建物群や各建物に設定する重要度を算出する際に、画像を蓄積する必要がないため、低性能の端末であっても重要度を算出することができる。
実施の形態4.
図6は、この発明の実施の形態4に係る検索装置の構成を示すブロック図である。
図6に示す検索装置200は、コンピュータグラフィックスを用いた3次元表示において、描画データを選択する際に、3次元モデルの中から、表示に必要な3次元モデル及び3次元データを選択抽出可能とするための検索装置であって、3次元モデルのデータを格納する記憶部10と、複数のオブジェクトや個々のオブジェクトのポリゴンに設定する重要度を3次元モデルの視認性評価や可視性評価に基づいて算出する重要度生成部20と、3次元空間内における地点と方向との対応関係を生成する方向定義部90と、3次元モデルに関する情報や、オブジェクト群やオブジェクトのポリゴンに対して算出した重要度を管理するインデックスを生成するインデックス生成部110と、3次元空間内における視点位置や視線方向等、視点に関する情報を生成する視点情報生成部50と、オブジェクトの3次元モデルをレンダリングして表示する表示部60と、3次元空間内における方向と関連づいた複数種類の重要度を用いて、オブジェクトのデータを抽出する選択的抽出部120とを備えている。
ここで、記憶部10は、3次元データ等を記憶するとともにインデックスを有する。方向定義部90は、3次元空間内における地点と方向との対応関係を生成する。インデックス生成部110は、3次元モデルに関する情報や、オブジェクト群やオブジェクトのポリゴンに対して算出した重要度を管理するインデックスを生成し、記憶部10に格納する。
また、インデックス生成部110は、3次元形状データやテクスチャデータ等の3次元モデルに関する情報を管理するインデックスを生成する形状管理インデックス生成手段111と、複数のオブジェクトをまとめたオブジェクト群やオブジェクトのポリゴンに対して算出した重要度を管理するインデックスを生成する重要度管理インデックス生成手段112とを備えている。
また、選択的抽出部120は、3次元空間内における方向と関連づいた複数種類の重要度を用いて、オブジェクトのデータを抽出するもので、インデックスが管理する3次元空間の中から、視点情報を用いてオブジェクトの抽出領域を決定する領域決定手段121と、重要度と関連付けられている3次元空間内の方向の中から、視線方向に最も近い方向を取得する視線方向取得手段122と、視点の付近の領域に境界オブジェクトが含まれるオブジェクト群を抽出する境界オブジェクトに基づくオブジェクト群抽出手段123と、3次元空間内で視点が定まった際に視点位置からも大きく表示されるオブジェクト群を端末の画面サイズに適応して抽出する視認位置に基づくオブジェクト群抽出手段124と、前記境界オブジェクトに基づくオブジェクト群抽出手段123と視認位置に基づくオブジェクト群抽出手段124からオブジェクト群を受け取ると、各オブジェクト群の中から重要性が高いオブジェクトを抽出し、3次元形状やテクスチャ等の空間データを抽出するデータ抽出手段125とを備えている。
重要度生成部20の構成は、実施の形態1〜実施の形態3と同様であり、各手段の処理内容は実施の形態1〜実施の形態3と同様である。また、視点情報生成部50、表示部60の各処理内容は実施の形態2と同様である。
次に、都市空間を対象として動作について説明する。
以下では、インデックスを生成する事前処理と、3次元空間内で視点が定まった際に、視点位置や視線方向に応じてデータを抽出する検索時処理の2つに分けて説明する。
事前処理において、操作員がマウスやキーボード等を用いて視点の位置や視線方向、視点の移動方向や1秒あたりの移動変位量等を入力すると、視点情報生成部50では、入力された情報に基づいて視点に関する情報を生成する。生成した情報は、記憶部10に格納するとともに表示部60に渡す。
表示部60では、前記視点情報生成部50が生成した視点位置と方向に基づいて、3次元モデルをレンダリングし、表示する。レンダリングの処理内容は、世の中一般のレンダリングと同様である。表示が完了すると、重要度生成部20にメッセージを送る。
重要度生成部20では、3次元モデルの遠方からの視認性評価に基づき、複数のオブジェクトをまとめたまとまり(オブジェクト群)に設定する重要度を3次元空間の方向と対応付けて算出し、また、可視性評価や属性情報等を用いてオブジェクトのポリゴンに対する重要度を算出して、記憶部10に格納する。具体的な動作は、実施の形態1〜3と同様である。
方向定義部90は、視点に関する情報を、前記視点情報生成部50や記憶部10に格納されている、画像生成時の視点情報から取得すると、3次元空間内における地点と方向との対応関係を生成し、記憶部10に格納する。
その対応関係の例を図7に示す。図7において、ルートIDは、視点情報生成部50において視点を移動させた際の移動ルートを特定するIDである。例えば、道路上で視点を移動させた場合には、道路のIDとなる。方向IDは、移動ルートにおいてどの方向に視点を移動させたかを区別するIDである。例えば、図8に示す道路に関して視点を移動させる場合、地点Aから地点Bに向かう方向と、地点Bから地点Aに向かう方向の2種類の方向に対してIDを作成する。IDを決める際には、南から北に向かう方向や西から東に向かう方向を方向1、北から南に向かう方向や東から南に向かう方向を方向2などと、方位を利用してIDを簡易的に作成してもよい。地点座標及び、地点座標における視線方向ベクトルは、視点情報生成部50が生成した視点情報から取得することが出来る。
インデックス生成部110では、記憶部10から3次元形状データや前記重要度生成部20が算出した重要度を取得し、3次元モデルに関する情報や重要度を管理するインデックスを生成し、記憶部10に格納する。
形状管理インデックス生成手段111では、3次元モデルに関する情報を管理するインデックスを生成し、記憶部10に格納する。テーブルを用いて管理する例を図9に示す。図9に示す領域管理テーブルは、3次元モデルを領域に基づいて管理するテーブルの例である。領域IDは、例えば3次元空間を図郭等の領域に分割した際の分割単位のIDであり、領域代表座標は、例えば、分割単位の領域に外接する矩形の頂点座標である。建物IDや道路IDは、領域IDに含まれる建物や道路のIDである。
また、図9に示す道路テーブルは、道路に関するデータを管理するテーブルの例である。道路IDは、図7においてルートIDが道路IDの場合には図7のルートIDに示した道路IDと対応している。ノード情報やリンク情報は、一般的な道路データのノード・リンク情報と同様である。
また、図9に示す建物概要テーブルは、建物に関するデータを管理するテーブルの例である。隣接道路IDは、建物が道路に面して配置する場合に、建物に隣接する道路のIDを示す項目である。隣接している道路の数に応じて適宜増やすことができる。さらに、図9に示す建物詳細テーブルは、建物の頂点座標やポリゴン情報等、3次元モデルに関するデータを管理するテーブルの例である。
重要度管理インデックス生成手段112では、建物や建物群に関する重要度を管理するインデックスを生成し、記憶部10に格納する。テーブルを用いて管理する例を図10に示す。図10に示す建物重要度テーブルは、前記重要度生成部20において算出した、建物に関する重要度を3次元空間内における方向と対応付けて管理するテーブルの例である。隣接道路IDは、建物概要テーブルの隣接道路IDに対応している。また、方向IDは、重要度を算出した際の3次元空間内における方向に対応しており、建物重要度は、隣接道路ID上を方向IDの方向に視点移動した際の可視性評価に基づいて算出した建物ポリゴンの重要度である。重要度生成部20において重要度を算出していないポリゴンに対しては、建物重要度に0の値を格納する。
また、図10に示す境界建物に基づく建物群重要度管理テーブルは、複数の建物をまとめた建物群に設定した重要度を管理するテーブルの例であり、建物群の中の境界建物に基づいて建物群を管理するテーブルである。各建物群を、建物群における境界建物が存在する領域IDに分類する。
さらに、図10に示す視認位置に基づく建物群重要度管理テーブルは、複数の建物をまとめた建物群に設定した重要度を管理するテーブルの例である。各建物群の画素数が一定値以上の大きさで表示された際の表示位置(以下、視認位置と表記)が含まれる領域IDに各建物群を分類する。
次に、インデックスを用いた検索時処理における動作を説明する。
操作員がマウスやキーボード等を用いて視点の位置や視線方向、視点の移動方向や1秒あたりの移動変位量等を入力すると、入力された情報に基づいて視点情報生成部50が視点に関する情報を生成し、選択的抽出部120に渡す。
選択的抽出部120は、前記視点情報生成部50から視点位置や視線方向を受け取ると、3次元空間内における方向と関連づいた建物群重要度、建物重要度を用いてオブジェクトのデータを抽出する。
選択的抽出部120において、領域決定手段121では、前記視点情報生成部50から視点位置や視線方向を受け取ると、3次元空間内における視点の付近の領域を限定し、視線方向取得手段122に渡す。図9、図10に示すテーブルを用いて、建物を抽出する動作の具体例を説明する。
まず、記憶部10に格納されているインデックスにおいて、図9に示す領域管理テーブルを参照し、前記視点情報生成部50から受け取った視点位置を含む領域IDを取得する。次に、道路テーブルを参照して、取得した領域IDに属する道路IDの中から視点位置に対応する道路IDを取得する。視点位置に対応する道路IDを取得する際に付近の道路IDも同時に取得することで、視点付近の領域を拡大することが出来る。
視点付近の領域は、メッシュ等の矩形に限らず、他の幾何形状を利用して決めてもよい。また、IDで管理された細分化された道路の単位で決めても良い。視点付近としてみなす領域の大きさは、端末の表示性能や画面サイズに応じて変えることが出来る。例えば、視点付近の領域を、円を用いて決める場合、画面サイズと円の半径との対応関係を記憶部10に格納しておく。
選択的抽出部120の視線方向取得手段122では、前記視点情報生成部50から視線方向を受け取り、前記領域決定手段121から視点付近の領域を受け取ると、まず、記憶部10に格納してある、3次元空間内における地点と方向との対応関係を参照し、視点付近の領域であり、なおかつ視線方向に最も近い方向ベクトルを取得する。なお、3次元空間内における地点と方向との対応関係は、例えば図7であり、前記方向定義部90が生成して記憶部10に格納している。この取得した方向ベクトルから、対応する道路IDや方向ID(方向1等)を取得し、これを視線方向に対応する道路の方向とする。取得した道路の方向は、データ抽出手段125に渡す。
選択的抽出部120において、境界オブジェクトに基づくオブジェクト群抽出手段123では、前記視点情報生成部50から視点位置、視線方向を受け取り、前記領域決定手段121から視点付近の領域を受け取り、前記視線方向取得手段122から視線方向に対応する道路の方向を受け取ると、前記インデックス生成部110で作成したインデックスを参照し、視点の付近の領域に境界建物が含まれる建物群を抽出する。抽出した建物群は、データ抽出手段125に渡す。
選択的抽出部120において、視認位置に基づくオブジェクト群抽出手段124では、前記視点情報生成部50から視点位置、視線方向を受け取ると、建物群を抽出する際に用いる基準(建物群重要度範囲または建物群個数)を決定し、前記視点情報生成部50から受け取った視線方向に対応した方向の建物群重要度を用いて、現在の視点位置から大きく表示されるオブジェクト群を端末の画面サイズに適応して抽出し、建物群重要度と合わせてデータ抽出手段125に渡す。建物群を抽出する際に用いる基準をどちら(建物群重要度範囲/建物群個数)にするのかは、記憶部10に格納された定義ファイルに従う。
建物群重要度範囲を用いた抽出方法と、建物群個数を用いた抽出方法のうち、まず、建物群重要度範囲を用いた抽出方法について説明する。この方法では、特定範囲内の建物群重要度を有する建物群のみを抽出する。抽出に用いる建物群重要度範囲は、操作員が任意の範囲に設定してもよいし、視点位置に基づいて決めてもよい。後者の場合では、視点位置付近が視認位置となっている建物群を取得することにより、視点位置から大きく表示される可能性が高い建物群を選択的に抽出できる。その例を図11に示す。図11において、建物群A〜建物群Fは、オブジェクト群作成手段において作成された建物のまとまりである。例えば、建物群Dと建物群Fの視認位置が図11中の菱形の位置であるとする。現在の表示視点位置が図中のVの位置であり、視線方向が矢印方向である場合、視点位置の付近に視認位置が存在する建物群として建物群Dを取得する(建物群Fは取得しない)。図11中には、建物群B、C、Eの視認位置を示していないが、これらの建物群に関しても同様である。
次に、建物群個数を用いた抽出方法について説明する。
抽出に用いる建物群個数は、操作員が任意の個数を設定することができる。前記視点情報生成部50から受け取った視線方向に対応する方向の建物群重要度を参照し、視線方向に対応する方向の建物群重要度が高い順にN個の建物群を抽出する。このとき、抽出範囲とする建物群重要度の範囲は任意に設定してもよいし、視点位置に基づいて決めてもよい。
選択的抽出部120において、データ抽出手段125では、前記視点情報生成部50から視点位置、視線方向を受け取り、境界オブジェクトに基づくオブジェクト群抽出手段123と視認位置に基づくオブジェクト群抽出手段124から建物群と、対応する建物群重要度を受け取ると、各建物群の中から建物を抽出し、頂点座標やテクスチャ頂点座標、テクスチャデータ等の空間データを記憶部10に格納されているインデックスを用いて抽出し、表示部60に読み込みメッセージを送る。
各建物群の中からの建物の抽出では、重要度の高いポリゴンを有する建物を優先的に抽出することが出来る。また、各建物群から境界建物を必須で抽出することも出来る。また、視点からの距離に応じて各建物群からの抽出軒数を変え、視点付近の建物群からは多数の建物を抽出することが出来る。
このようにして建物を抽出し、頂点座標やテクスチャデータ等を抽出すると、抽出データを記憶部10に格納するとともに、表示部60に読み込みメッセージを送る。
表示部60では、データ抽出手段125から読み込みメッセージを受け取ると、記憶部10に格納された空間データを取得し、3次元モデルをレンダリングする。なお、検索や表示の際には、既に表示しているオブジェクトの空間データを除き、新たに必要となる空間データのみを検索し、表示することができる。また、頂点座標等の詳細な空間データを抽出したポリゴンから、順次表示することができる。
なお、この実施の形態4では、領域決定手段121において視点の付近の領域を限定する際に領域ID等を利用しているが、他の方法を用いてもよい。例えば、記憶部10に円の半径Rや矩形の縦幅・横幅を記憶しておき、視点位置を中心とする半径Rの円や矩形を視点付近の領域を限定する際に用いてもよい。その他、道路上を予め複数の領域に分割し、建物等のオブジェクトを各領域に割り当てたインデックスを作成しておいて、この領域を利用して視点の付近の領域を限定してもよい。
以上のように、実施の形態4に係る検索装置200では、オブジェクト群やオブジェクトのポリゴンに対して設定された重要度を用いて描画データを選択的に抽出することにより、描画データ量を削減出来るので、描画性能の低い端末を利用する場合にも、3次元モデルを高速に表示することができる。
また、建物群に設定された重要度を用いることにより、遠方からの視認性に基づいて建物を抽出することが出来る。このため、携帯電話のように小さな画面では見えにくい、不要な建物を多数抽出することがなくなり、端末の画面サイズに応じたデータを効率的に抽出することが出来る。このため、モバイル端末のように画面サイズが小さい端末に表示する際に伝送表示するデータ量を削減でき、データ伝送時間を短縮し、高速に描画することが出来る。
また、オブジェクト群の中から表示のシルエットとなるオブジェクトを抽出できるので、オブジェクトの抽出件数が少ない場合でも景観等のシルエットを維持することができ、画質の劣化を回避できる。したがって、携帯電話等のモバイル端末を用いて現在地の景観を表示し、表示された景観のシルエットと実風景のシルエットとを見比べて現在地の位置関係を把握できるので、歩行者ナビゲーション等において役立つ。
さらに、実施の形態4では、3次元空間内における視点移動の結果をレンダリング画像に出力しない構成であるが、図4の構成に画像生成部を追加し、3次元空間内で視点を移動する際にレンダリング画像を生成するようにしてもよい。この場合の構成は、図12となる。図12に示す構成では、図6に示す構成に対し、3次元モデルをレンダリングした結果を画像に出力し、前記記憶部10に格納する画像生成部70をさらに備え、図4に示す実施の形態2と同様にして、画像生成部70で生成したレンダリング画像が記憶部10に格納される。重要度生成部20では、このレンダリング画像を用いてオブジェクトのポリゴンやオブジェクトをまとめたオブジェクト群に対する重要度を算出することが出来る。
また、実施の形態4では、形状や重要度をテーブルによって管理する実施の形態を示しているが、テーブル以外の方法で管理してもよい。また、管理する項目は、図9、図10に記載の内容に限定しない。
実施の形態5.
図13は、この発明の実施の形態5に係る配信装置の構成を示すブロック図である。
図13に示す配信装置は、コンピュータグラフィックスによる3次元表示において、表示上重要なオブジェクトを優先的に抽出し、端末に配信する配信装置であって、3次元モデルのデータを格納する記憶部10と、複数のオブジェクトや個々のオブジェクトのポリゴンに設定する重要度を3次元モデルの視認性評価や可視性評価に基づいて算出する重要度生成部20と、3次元空間内における地点と方向との対応関係を生成する方向定義部90と、3次元モデルに関する情報や、オブジェクト群やオブジェクトのポリゴンに対して算出した重要度を管理するインデックスを生成するインデックス生成部110と、3次元空間内における方向と関連づいた複数種類の重要度を用いて、オブジェクトのデータを抽出する選択的抽出部120と、端末と3次元データ等のデータの送受信を行う通信制御部130とを備えている。
ここで、通信制御部130は、3次元モデルを表示する端末と視点に関する情報や形状やテクスチャ等の3次元形状データの送受信を行う。データの送受信に用いる通信路の形態や通信方式は任意である。また、3次元モデルを表示する端末も任意である。さらに、記憶部10、重要度生成部20、方向定義部90、インデックス生成部110、選択的抽出部120の各処理内容は、実施の形態4と同様である。
次に動作について説明する。
重要度生成部20は、3次元形状データやテクスチャデータ、色情報、属性情報等、3次元モデルに関するデータを用いて、各オブジェクトや複数のオブジェクトをまとめたまとまりに設定する重要度を3次元空間内の方向と対応付けて算出する。重要度算出の際に用いる特徴量や数式のパラメータ等は、回線の通信速度や配信装置に接続している端末の性能等に応じて調整することができる。
方向定義部90、インデックス生成部110の具体的な動作は、実施の形態4と同様である。また、通信制御部130は、端末から視点位置や方向等の視点に関する情報を受け取ると、選択的抽出部120に渡す。
選択的抽出部120は、通信制御部130から視点位置や方向等、視点に関する情報を受け取ると、記憶部10が有しているインデックスを用いて、重要度を利用したデータの抽出を行う。抽出の具体的な動作は、実施の形態4と同様である。重要度を用いてポリゴンを抽出する際には、抽出の基準として用いる重要度の数値や範囲、オブジェクトの件数を、回線の通信速度と対応付けて記憶部10に記憶しておき、回線の通信速度に応じた基準でオブジェクトやポリゴンの抽出を行うことができる。
通信制御部130は、選択的抽出部120のデータ抽出手段125から、オブジェクトの3次元形状データやテクスチャデータ等の空間データを受け取ると、表示端末に送信する。このとき、表示端末に送信済みのデータは除き、まだ送信していないデータを送信することができる。また、表示端末から再送のメッセージを受信した場合には、メッセージに従って、該当するデータを再送することができる。送信の際には、表示端末の表示性能や回線の伝送速度等に応じてデータを複数回に分けて送信することが出来る。
なお、この実施の形態5は、多数のオブジェクトの中から送信する空間データを選択する際の重要度を、記憶部10に記憶されているレンダリング画像を用いて算出する実施の形態であるが、視点情報生成部50と表示部60を追加し、3次元空間内で任意に視点移動した際の表示を用いて重要度を決定しても良い。この場合の構成を図14に示す。また、図14の構成に画像生成部70を追加し、視点移動に伴う表示をレンダリング画像として生成し、記憶部10に格納できるようにしてもよい。この場合の構成は図15となる。
以上のように、実施の形態5に係る配信装置300では、多数の端末が配信装置に接続し、3次元空間内における視点移動を行っている場合においても、端末ごとに、また、視点移動ごとに各オブジェクトの重要度をそのつど算出する必要がない。配信装置に予め蓄積されている重要度を用いて直ちに各端末上の表示において重要なポリゴンを検索して配信することができるので、端末側では、3次元空間内で高速に視点の移動を行うことができる。
また、通信速度が低い回線や描画性能が低い端末を利用するために多数のオブジェクトを抽出・配信できない場合であっても、限られたデータ量で景観のシルエットとなるオブジェクトや重要性の高いオブジェクトを選択的に抽出することができ、画質を維持しつつ、高速配信・高速描画を実現できる。
実施の形態6.
図16は、この発明の実施の形態6に係る情報配信システムにおける表示装置400の構成を示すブロック図である。
この実施の形態6に係る情報配信システムは、LANやインターネット、無線LAN等のネットワーク通信網により、データの送受信を行う配信装置と表示装置400とを有する情報配信システムであって、表示装置400として、図16に示す如く、3次元モデルのデータを格納する記憶部10と、3次元空間内における視点位置や視線方向等、視点に関する情報を生成する視点情報生成部50と、オブジェクトの3次元モデルをレンダリングして表示する表示部60と、表示装置400の表示性能や画面サイズ、表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを検出する検出部140と、前記視点情報生成部50から視点位置や方向等、視点に関する情報を受け取ると、3次元空間内の特定の地点及び地点間の方向ベクトルと、前記視点情報生成部50から受け取った視点との位置及び移動方向とを比較し、配信装置へのデータ要求を行うか否かの判定を行う視点判定部150と、配信装置と3次元データ等のデータの送受信を行う通信制御部130とを備えている。
また、図17は、この発明の実施の形態6に係る情報配信システムにおける配信装置の構成を示すブロック図である。
この実施の形態6に係る配信装置300としては、図17に示す如く、オブジェクトの3次元データや画像、重要度を格納したインデックス等を記憶する記憶部10と、インデックスを用いてデータを検索する選択的抽出部120と、表示装置400と3次元データ等のデータの送受信を行う通信制御部130とを備えている。
ここで、図16に示す表示装置400において、記憶部10は、配信装置300から受信した3次元データや、設定情報等のデータを記憶している。表示部60は、3次元モデルをレンダリングして表示する。また、検出部140は、表示装置400の表示性能や表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを検出する。
また、視点判定部150は、前記視点情報生成部50から視点位置や方向等、視点に関する情報を受け取ると、3次元空間内の特定の地点及び地点間の方向ベクトルと、前記視点情報生成部50から受け取った視点との位置及び移動方向とを比較し、配信装置300へのデータ要求を行うか否かの判定を行う。視点情報生成部50は、3次元空間内における視点位置や方向等、視点に関する情報を生成する。通信制御部130は、配信装置とデータの送受信を行う。データの送受信に用いる通信路の形態や通信方式は任意である。
一方、図17に示す配信装置300において、記憶部10は、オブジェクトの3次元データや画像等を記憶し、重要度を格納したインデックスを有している。重要度は、オブジェクトのポリゴンや複数のオブジェクトをまとめたオブジェクト群に対して、実施の形態1〜実施の形態3で示した方法により算出したものであり、実施の形態4や実施の形態5の方法によって重要度を管理するインデックスを構築した結果を、媒体等を介して記憶部10に格納している。通信制御部130は、表示装置400と3次元データ等のデータの送受信を行う。
選択的抽出部120は、インデックスを用いてデータを検索する。視線方向取得手段122、境界オブジェクトに基づくオブジェクト群抽出手段123、視認位置に基づくオブジェクト抽出手段、データ抽出手段125を含む構成とする。検出部140は、表示装置400の表示性能や画面サイズ、表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを検出する。視点判定部150は、視点に関する情報を用いて、配信装置へのデータ要求を行うか否かの判定を行う。
次に、動作について示す。
検出部140は、表示装置400の表示性能や画面サイズ、表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを検出する。例えば、表示性能の検出では、予め3次元モデルを描画させた際の描画時間やフレームレートを検出することが出来る。検出結果は、通信制御部130に送る。
表示装置400において、操作員がマウスやキーボード等を用いて3次元空間内における視点の位置や移動方向、1秒あたりの移動変位量等を入力すると、入力された情報に基づいて視点情報生成部50が視点位置と方向等、視点に関する情報を取得する。取得した情報は、視点判定部150に送る。
視点判定部150では、前記視点情報生成部50から視点位置や方向等、視点に関する情報を受け取ると、3次元空間内の特定の地点及び地点間の方向ベクトルと、前記視点情報生成部50から受け取った視点との位置及び移動方向とを比較し、配信装置300へのデータ要求を行うか否かの判定を行う。
視点判定部150による視点の判定の例を、図18を用いて示す。
図18において、地点A〜地点Jは道路上に設定されている特定の地点とする。これらの地点の座標は、記憶部10に記憶されている。視点移動開始時において、前記視点情報生成部50では、図18のV1の位置に視点の位置を生成したとする。視点判定部150では、特定の地点の仲から視点V1の付近に存在する地点を検索し、その結果、地点Bと地点Cを得る。操作員がマウス等を用いてV1の位置から視点を前進させると、前記視点情報生成部50では、V2の位置に視点の位置を生成する。
この視点情報を視点判定部150が受け取ると、視点の移動方向として、V1からV2へ向かう方向ベクトルを算出し、この方向ベクトルを利用して、視点V1の付近として取得していた地点Bと地点Cに関して、地点Bから地点Cに向かう方向に視点が移動していると判定する。そこで、前記視点情報生成部50から視点情報を受け取る毎に、地点Cとの距離を判定し、地点Cとの距離が一定範囲以内になった場合には、配信装置300にデータ要求を行う視点位置であると判定する。図18の例の場合、視点位置がV3となった場合に、地点Cに近づいたとみなして配信装置にデータ要求を行う判定となる。配信装置300にデータ要求を行う判定を下した場合には、データ要求を行うメッセージとその時の視点情報とを通信制御部130に送る。
通信制御部130は、前記検出部140から、表示装置400の表示性能や画面サイズ、表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを受け取り、前記視点判定部150から視点情報を受け取ると、これらのデータを、ネットワークを介して配信装置300に送る。
配信装置300では、通信制御部130が、表示装置400から送られてきた表示装置400の環境に関するデータ、視点情報を受け取ると、選択的抽出部120に送る。
選択的抽出部120では、通信制御部130から、表示装置400の環境に関するデータ、視点情報を受け取ると、記憶部10が有しているインデックスを用いて、重要度を利用したデータの抽出を行う。抽出の具体的な動作は、実施の形態4と同様である。なお、選択的抽出部120の領域決定手段121では、視点付近としてみなす領域の大きさを回線の伝送速度に応じても変えることが出来る。端末の表示性能や画面サイズと同様に対応関係を記憶部10に格納しておく。通信制御部130は、選択的抽出部120から抽出結果を受け取ると、ネットワークを介して表示装置400にデータを送信する。具体的な動作は、実施の形態5と同様である。
なお、この実施の形態6は、表示装置400に配信するデータ範囲を決定する際の領域を、円で決める実施の形態を示しているが、領域の形状は、円に限定しない。矩形等を用いても良い。
また、実施の形態6は、3次元空間内の特定の地点として道路上に地点を設定しているが(図18)、設定する地点は必ずしも道路上に限らず、任意の地点を設定することができる。
また、実施の形態6では、配信装置300が、重要度を管理するインデックスを、媒体等を介して記憶部10に格納している実施の形態であるが、配信装置300で重要度を算出したり、インデックスを構築したりしてもよく、図10の配信装置300の代わりに図6、図7、図8の構成の配信装置300を用いた情報配信システムでもよい。
以上のように、実施の形態6に係る情報配信システムでは、個々の表示装置400がデータ要求の判定を行い、必要な時にのみ配信装置にデータの要求を行い、これに基づいて3次元表示を行うので、表示装置400では、不要に多くのデータを受信したり表示したりする必要がない。このため、表示装置400の表示性能が低い場合でも、多くの3次元モデルを表示しようとして描画速度が低下することを回避できる。
また、回線の通信速度が遅い場合でも、不要に多くのデータを送信しないため、データ送信時間を短縮することが出来る。また、配信装置が送信するデータは、表示装置400の表示性能や画面サイズ、回線の通信速度等を考慮して広範囲の3次元空間内から抽出されるデータであり、さらに、オブジェクトのポリゴンや複数のオブジェクトをまとめたオブジェクト群に対する重要性に基づいて重要な空間データを優先的に抽出しているため、伝送速度が遅い回線や低性能の表示装置400を利用する場合であっても少ないデータ量でありながら表示品質の著しい低下を防ぐことができる。また、高速に表示することができる。
また、個々の表示装置400が、その表示性能や回線の伝送速度等を検出して配信装置に送るので、配信装置は、受け取った内容(表示性能や回線の伝送速度等)に応じて空間データの抽出を行うことが出来る。したがって、多数の表示装置400が配信装置に接続している場合であっても、個々の表示装置400に送る空間データの内容を配信装置が決めずに済み、配信装置の負荷を軽減することができる。これにより、表示装置400は、配信装置から高速に空間データを受信することができる。
実施の形態7.
(実施の形態1+略地図作成)
実施の形態7は、オブジェクトを選択的に抽出可能とするための重要度を生成するとともに、歩行者ナビゲーションを行う際に、経路中の移動方向や目印となるオブジェクトを立体的に分かりやすく表示可能とする略地図を生成することの出来る情報生成装置に関する実施の形態である。
図19は、この発明の実施の形態7に係る情報生成装置の構成を示すブロック図である。
図19に示す情報生成装置100は、道路や建物等のオブジェクトの3次元データ、2次元地図、道路ネットワークデータ、パラメータ等を記憶する記憶部10と、3次元形状データや色情報、属性情報等、3次元モデルに関するデータを用いて、各オブジェクトや、複数のオブジェクトをまとめたまとまりに設定する重要度を3次元空間内の方向と対応付けて算出する重要度生成部20と、空間データを検索する検索部160と、経路や経路中の目印となる建物等を立体的に且つ簡易的に表現した略地図を生成する略地図処理部170とを備えている。なお、重要度生成部20は、図1に示す実施の形態1と同様の構成であり、オブジェクト群重要度生成部30とオブジェクト重要度生成部20とから成る。
ここで、略地図処理部170は、出発地や目的地の位置情報を取得する情報取得部180と、出発地から目的地に至る経路検索を行う経路探索部190と、出発地から目的地に至る経路や経路中の目印となるオブジェクトを立体的に表現できる略地図を作成する略地図情報生成部210とを備えている。
そして、略地図情報生成部210は、前記経路探索部190から経路データを受け取ると、経路中の各道路長の伸張を行い、経路が見やすくなるようにデフォルメし、道路の簡易形状を作成する道路デフォルメ部220と、略地図の地図要素(建物や道路)の3次元モデルを3次元空間内で見る際の視点情報を生成する視点視線情報生成部270と、前記道路デフォルメ部220で生成されたデフォルメ後の道路に対応して、建物等のオブジェクトが見やすいスケールとなるように大きさを拡大縮小し、オブジェクトを交差点等の位置に対応して再配置するオブジェクトデフォルメ部230と、経路中の主要な道路及び建物を立体的に表現した略地図を生成する略地図作成部240とを備えている。
また、前記道路デフォルメ部220は、経路が見やすくなるように経路を構成する各道路長を伸張するデフォルメ手段221と、デフォルメ後の経路データを用いて道路の簡易的な形状を作成する簡易形状作成手段222とを有する。
また、前記視点視線情報生成部270は、出発地からの移動方向が分かり易い位置・方向の視点情報を生成する初期視点情報生成手段271と、出発地から目的地に至る経路において、経路中の各移動部分に対して、移動部分における移動方向や次の移動部分への曲がり角の目印が分かり易い視点位置・方向から略地図を表示可能な視点情報を生成する移動部分対応視点情報生成手段272とを有する。
さらに、前記オブジェクトデフォルメ部230は、前記道路デフォルメ部220においてデフォルメした道路に対応して、オブジェクトの配置位置と配置方向を算出する配置情報算出手段231と、経路に対して建物等のオブジェクトが見やすい大きさになるように拡大縮小を行うとともに、デフォルメ後の道路形状中の配置位置と配置方向に応じたデフォルメ後のオブジェクト3次元座標を算出する拡大縮小手段232とを有する。
次に、動作について説明する。
描画データを選択する際に、膨大な3次元モデルの中から、表示に必要な3次元モデル及びそのデータ(3次元形状データやテクスチャデータ等)を選択抽出可能とするための重要度を生成する動作は、実施の形態1と同様である。
以下では、略地図処理部170の動作について説明する。
情報取得部180では、出発地や目的地の位置情報を取得する。出発地や目的地の地点は、操作員がマウスやキーボード、ペン、ダイヤル、キー等の操作により、入力することが出来る。地点情報を直接入力する方法のほか、予め用意されている地点の中から選択してもよい。また、略地図生成部210がGPS等の位置取得可能な機能を備えている場合には、この機能により取得した位置情報を出発地の位置情報とすることが出来る。取得した位置情報は、経路探索部190に渡す。
経路探索部190は、前記情報取得部180から出発地と目的地の位置情報を受け取ると、記憶部10に格納されている地図データやネットワークデータを用いて、出発地から目的地に至る経路を検索する。検索は、最短経路を検索する手法として知られているDijkstraの方法を用いてもよいし、他の方法でもよい。また、歩道上を優先したり、歩道上のみを通る経路に限定したりしてもよい。
経路検索の結果、出発地から目的地に至る経路が経路データとして獲得できる。経路データは、例えば、ノードとリンク(ノードとノードをつなぐ線)から成るデータである。獲得した経路データを記憶部10に格納し、道路デフォルメ部220のデフォルメ手段221に渡す。
検索部160では、前記経路探索部190から経路データを受け取ると、記憶部10に格納されている3次元地図データから経路中の主要なオブジェクト(目印となる建物や信号等)や、経路に関わる道路等、経路に関連するオブジェクトの3次元データを検索して取得する。建物は、経路に沿う領域等、経路の付近の中から検索する。出発地や目的地付近の建物、交差点付近の建物、ランドマークや銀行・コンビニ等のシンボル的な建物等を検索することが出来る。また、記憶部10に格納されている前記重要度生成部20において算出した重要度を用いて、経路の付近の中から、景観再現上、重要なオブジェクトを検索することが出来る。検索結果は、オブジェクトデフォルメ部230に渡す。
道路デフォルメ部220では、前記経路探索部190から経路データを受け取ると、経路中の各道路長の伸張や交差点道路の簡易作成等を行い、経路に関する、デフォルメした道路形状を作成する。
まず、デフォルメ手段221では、経路が見やすくなるように経路を構成する道路長を変更する。図20のように、経路データにおいて経路を構成する道路の長さに極端な長さの違いがある場合には、極度に短い道路の長さを伸張することで、経路全体を表示した際に分かりにくい部分がないようにする。
以下に、道路の長さを伸張する動作を図21のフローチャートに従って説明する。
(S1)ノード間距離の算出
まず、経路データを参照し、経路を構成する各ノード間の距離を算出する。
(S2)経路のスケールの算出
次に、「ノード間距離の算出」で算出したノード間距離の中からノード間距離の最小値と最大値を求め、最大値に対する最小値の比率を求め、経路のスケールとする。
(S3)ノード間距離の変更
経路のスケールの値を閾値と比較し、閾値よりも小さい場合には、ノード間距離の差が大きく、見にくい地図になるとみなしてノード間距離の伸張を行う。
ノード間距離の伸張は、経路を構成するノードのうち、ノード間距離が短いノード間に対して行う。具体的には、経路を構成する各ノード間距離が、ノード間距離の最大値に比べてどの程度異なるかを調べ、ノード間距離の最大値に比べて極度に短い場合には、そのノード間距離を伸張する。例えば、図22の経路の場合、経路を構成するノード間距離に大きな差がないため、ノード間の伸張は行わない。図23の経路の場合、ノードN3・N4間の距離が他のノード間距離に比べて極度に短いため、ノードN3・N4間の長さを伸張する(図24参照)。
伸張においては、経路を構成するノード間距離の相対的な大小関係を維持する範囲で行う。例えば図23の場合、ノードN3・N4間の長さが他のノード間距離の長さを超えない範囲で伸張する。ノード間距離の伸張では、短いノード間の距離を伸張する他に、ノード間距離の最大値の長さを変更し、その変更後の値に応じてその他のノード間距離も相対的に変更することが出来る。
(S4)ノードの再配置
「(S3)ノード間距離の変更」において変更した変更後のノード間距離の値を用いて、各ノードの配置位置を算出する。ノード間距離を伸張して再配置した、デフォルメ後の経路データを記憶部10に格納し、簡易形状作成手段222、オブジェクトデフォルメ部230に渡す。
簡易形状作成手段222では、前記デフォルメ手段221からデフォルメ後の経路データを受け取ると、経路データを軸線とする領域により、道路の簡易的な形状を作成し、3次元座標を算出してポリゴンを作成する。作成した、デフォルメ後の道路形状データは記憶部10に格納し、オブジェクトデフォルメ部230に渡す。
図25〜図27を用いて簡易形状作成手段222による作成例を説明する。図25、図26において、a〜cは前記デフォルメ手段221においてノード間距離を伸張して再配置した後のノードであり、ルートは歩道上のルートを示している。ノードa、ノードbを結ぶ線分を軸線とし、軸線の左右に幅Lw、Rwだけ広げた矩形領域を作成する。このとき、「ノードaの、ノードbに接続していない側」や、「ノードbの、ノードaに接続していない側」に各々Δ1やΔ2だけ領域を広げることで、ノードa、ノードb間に関する矩形領域を図25に示す領域のように作成することができる。同様にして、ノードb、ノードc間に関する矩形領域を図26に示す領域として作成することができる。
一つの車道に関して、車道左側の歩道から車道右側の歩道に移動する経路の場合の矩形領域の作成例を図27に示す。ノードaおよびノードbは、車道左側の歩道上の地点であり、ノードcおよびノードdは、車道右側の歩道上の地点である。
簡易形状作成手段222では、デフォルメ後の経路データに基づいて道路の簡易形状を作成する他に、経路データ中の任意のノードに関して、移動方向に対して交差する道路を作成することが出来る。これにより、主要な交差点を、交差する道路によって示すことが出来る。
交差する道路の交差角度は、道路ネットワークデータのリンクどうしの交差角度を算出することで取得できる。また、図25、図26や図27に示した、デフォルメ後の経路データに基づいて作成する矩形領域の幅も、道路ネットワークデータから幅員を取得して設定できる。交差角度や幅は、任意の値としてもよい。
視点視線情報生成部270では、前記記憶部10から、デフォルメ後の経路データを取得すると、略地図を表示する3次元空間内の視点情報(視点位置や視線方向等)を生成する。
初期視点情報生成手段271では、前記記憶部10から、デフォルメ後の経路データを取得すると、略地図の地図要素(建物や道路等)の3次元モデルを3次元空間内で見る際の初期視点情報として、出発地からの移動方向と最初の曲がり角の様子が分かり易い位置・方向の視点情報を生成する。
以下、初期視点情報生成手段271による位置・方向の視点情報の生成手順を図28に示すフローチャートを参照して説明する。
(S11)経路全体の外接矩形と中心の算出
図29において、ノードa〜cは、デフォルメ後のノードであり、出発地はノードaに、目的地はノードcに対応している。まず、デフォルメ後の経路に対して、最初の移動方向(出発地から最初に移動する方向)をv軸、最初の移動方向の道路に直交する方向をu軸とし、経路全体の外接矩形をu軸及びv軸に沿う方向で求める(図30参照)。次に、求めた外接矩形に関して、外接矩形の中心座標を算出する。
(S12)視点座標の算出
まず、図31において、外接矩形の中心座標Pから−v軸方向にδだけ伸ばした点Qの座標を求める。次に、線分PQが最初の移動方向の道路線分(出発地を含む線分)に交差するように、点Pを中心として線分PQを角度φだけ回転し、回転後の点Qの位置を点Rとして点Rの座標を求める。図31の場合、最初の移動方向の道路線分は、線分abであるため、線分abに交差するようにベクトルPQを回転させる。別の例を図32に示す。
次に、図33に示すように、点Rから鉛直上方向にHvだけ移動した位置Vを視点として、道路や地表面からの高度である視点高度Hvを下式(1)により算出し、視点座標を算出する。
なお、Dvはデフォルト後の経路の外接矩形の一辺(出発地からの進行方向に対応する部分で、図31のv軸方向の成分)、θは外接矩形を視点高度Hvで見たときの視野角を示す。
(3)注視点座標の算出
図33において、外接矩形の中心点Pから鉛直上方向にHaだけ移動した位置P'を注視点とし、注視点の座標を算出する。
なお、上述した算出処理において、δ、φ、θ、Haは、操作員が任意の値を設定することが出来る。算出した視点座標、注視点座標は、記憶部10に格納する。
次に、移動部分対応視点情報生成手段272では、前記記憶部10から、デフォルメ後の経路データを取得すると、出発地から目的地に至る経路において、経路中の各移動部分に対して、移動部分における移動方向や次の移動部分への曲がり角の目印が分かり易い視点位置・方向から略地図を表示可能な視点情報を生成する。生成した視点情報は、記憶部10に格納する。
移動部分対応視点情報生成手段272による視点情報の生成処理を図34、図35を用いて説明する。図34において、ノードN1〜N4は、出発地から目的地に至る経路を示している。この経路の場合、移動部分は、「移動部分1:出発地から次の曲がり角への移動部分(ノードN1からN2への移動部分)」、「移動部分2:ノードN2から次の曲がり角(ノードN3)への移動部分」、「移動部分3:ノードN3から目的地までの移動部分」の4つが存在する。移動部分対応視点情報生成手段272では、移動部分2、移動部分3の移動に関して、移動方向や次の曲がり角の目印オブジェクトが分かり易い視点位置から略地図を表示できるように、視点情報を生成する。
経路を構成する移動部分のうち、注目している移動部分から目的地に至る移動部分のみの経路データを対象として前記初期視点情報生成手段271で説明した外接矩形を設定し、前期初期視点情報生成手段271で示した方法と同様にして視点情報を生成する。例えば図34において、移動部分2の移動に関して分かり易い視点情報を生成する場合には、図35に示すように、ノードN2、N3、N4を対象とした外接矩形を設定し、前記初期視点情報生成手段271と同様の方法により視点情報を生成する。
オブジェクトデフォルメ部230では、前記検索部160から、経路付近の主要な建物等の3次元データを受け取り、前記道路デフォルメ部220からデフォルメ後の経路データとデフォルメ後の道路形状を受け取ると、デフォルメ後のノードの位置や道路の形状に対応して、建物等のオブジェクトが見やすいスケールとなるように大きさを拡大縮小するとともにオブジェクトを交差点の位置に応じて再配置する。
以下では、オブジェクトとして建物の例を説明する。
まず、配置情報算出手段231では、前記道路デフォルメ部220においてデフォルメした道路に対応して、デフォルメ前のノード位置と建物との距離に基づいて建物の配置距離を算出し、経路に対する配置方向を算出する。
配置距離の算出は、記憶部10に格納されている経路データを参照し、前記選択的抽出部120から取得した各建物に対し、経路中のノードからの距離を算出することで行う。例えば、図36(A)において、ノードn1〜n4は前記経路探索部190で探索した経路中のノードであり、建物Aは選択的抽出部120において、経路中のノードn2(交差点n2)付近の建物として検索された建物であるとする。建物Aは、図36(B)に示すように、デフォルメ前のノードn2との距離Laだけ、デフォルメ後のノードn2'から離れた位置に配置することとなる。
配置方向は、経路中のノードと建物を結ぶ線分と、経路とのなす角度に基づいて算出する。図36(A)の建物Aの場合、図中の角度αの値と、方向ベクトルn2Pを算出する。配置距離と配置方向は、拡大縮小手段232に渡す。
拡大縮小手段232では、前記配置情報算出手段231からデフォルメ後の道路形状に対するオブジェクトの配置距離と配置方向を受け取ると、デフォルメ後の道路形状のノード間距離に基づいてオブジェクトの拡大縮小を行い、デフォルメ後の経路中ノードから配置距離分離した位置、配置方向の向きにオブジェクトを配置して、デフォルメ後のオブジェクトの3次元座標を算出する。
オブジェクトの拡大縮小は、デフォルメ後のノード間距離と比較しながら拡大縮小率を調整することで行う。
建物の例を以下に示す。
図37において、ノードn1'、n2'はデフォルメ後のノード配置位置である。また、建物A〜Fは、経路に関する建物として抽出された建物であり、図37に示される位置に配置されたとする。
ノードn1'、n2'間に存在する建物を比率Mで拡大または縮小した際の、ノードに沿う方向の距離(図中矢印に相当する距離)の和を求め、この和がノードn1'n2'間の距離以下となるように、拡大縮小を行う。拡大縮小率を決定後、検索部160から取得した建物の3次元データを拡大縮小し、配置位置と配置方向を上記で求めた位置及び方向として、建物デフォルメ後の3次元座標を算出する。
略地図作成部240では、記憶部10に格納された、デフォルメ後の道路形状データ、デフォルメ後のオブジェクトデータを統合し、経路や建物等から成る略地図データを作成する。作成した略地図データは、記憶部10に格納する。この略地図データを3次元表示可能なディスプレイに表示させた場合、経路付近に存在する建物等を立体的に(3次元的に)表現した略地図を前記視点視線情報生成部270で生成した視点情報から表示することができる。略地図の例を図38と図39に示す。
図38は、前記初期視点情報生成手段271において生成した、出発地からの移動方向及び最初の曲がり角の目印オブジェクトが分かり易い視点情報を用いて略地図を表示した例である。また、図39は、前記移動部分対応視点情報生成手段272において生成した、図36のノードN2からノードN3に向かう移動に関して移動方向及び次の曲がり角の目印オブジェクトが分かり易い視点情報を用いて略地図を表示した例である。
以上のように、実施の形態7に係る情報生成装置では、3次元モデルを用いた経路案内を行う場合に、地上から見た3次元景観表示のほかに、経路や経路中の目印オブジェクトを簡易的に分かりやすく表現した略地図を作成し、歩行者に提供することが出来る。
実施の形態8.
(実施の形態2+略地図作成)
実施の形態8は、オブジェクトを選択的に抽出可能とするための重要度を生成するとともに、歩行者ナビゲーションを行う際に、経路中の移動方向や目印となるオブジェクトを立体的に分かりやすく表示可能とする略地図を生成することの出来る情報生成装置に関する実施の形態である。即ち、上述した実施の形態7では、経路中の目印となる建物等のオブジェクトを拡大縮小する際に、経路を構成するノード間距離を用いる実施の形態であったが、この実施の形態8は、オブジェクトを表示した結果に基づいてオブジェクトの拡大縮小を行う実施の形態である。
図40は、この発明の実施の形態8に係る情報生成装置の構成を示すブロック図である。
図40に示す情報生成装置100は、図19に示す実施の形態7に係る情報生成装置の構成に対し、視点情報生成部50と、表示部60とをさらに備えている。
すなわち、図40に示す情報生成装置100は、道路や建物等のオブジェクトの3次元データ、2次元地図、道路ネットワークデータ、パラメータ等を記憶する記憶部10と、3次元形状データや色情報、属性情報等、3次元モデルに関するデータを用いて、各オブジェクトや、複数のオブジェクトをまとめたまとまりに設定する重要度を3次元空間内の方向と対応付けて算出する、実施の形態3の構成と同様な重要度生成部20と、空間データを検索する検索部160と、3次元空間内における視点位置や視線方向等、視点に関する情報を生成する視点情報生成部50と、オブジェクトの3次元モデルをレンダリングして表示する表示部60と、経路や経路中の目印となる建物等を立体的に且つ簡易的に表現した略地図を生成する略地図処理部170とを備えている。
ここで、略地図処理部170は、出発地や目的地の位置情報を取得する情報取得部180と、出発地から目的地に至る経路検索を行う経路探索部190と、出発地から目的地に至る経路や経路中の目印となるオブジェクトを立体的に表現できる略地図を作成する略地図情報生成部210とを備えている。
また、略地図情報生成部210は、前記経路探索部190から経路データを受け取ると、経路中の各道路長の伸張を行い、経路が見やすくなるようにデフォルメし、道路の簡易形状を作成する道路デフォルメ部220と、略地図の地図要素(建物や道路)の3次元モデルを3次元空間内で見る際の視点情報を生成する視点視線情報生成部270と、前記道路デフォルメ部220で生成されたデフォルメ後の道路に対応して、建物等のオブジェクトが見やすいスケールとなるように大きさを拡大縮小し、オブジェクトを交差点等の位置に対応して再配置するオブジェクトデフォルメ部230と、経路中の主要な道路及び建物を立体的に表現した略地図を生成する略地図作成部240とを備えている。
道路デフォルメ部220は、経路が見やすくなるように経路を構成する各道路長を伸張するデフォルメ手段221と、デフォルメ後の経路データを用いて道路の簡易的な形状を作成する簡易形状作成手段222とを有する。
また、視点視線情報生成部270は、出発地からの移動方向が分かり易い位置・方向の視点情報を生成する初期視点情報生成手段271と、出発地から目的地に至る経路において、経路中の各移動部分に対して、移動部分における移動方向や次の移動部分への曲がり角の目印が分かり易い視点位置・方向から略地図を表示可能な視点情報を生成する移動部分対応視点情報生成手段272とを有する。
さらに、オブジェクトデフォルメ部230は、前記道路デフォルメ部220においてデフォルメした道路に対応して、オブジェクトの配置位置と配置方向を算出する配置情報算出手段231と、経路に対して建物等のオブジェクトが見やすい大きさになるように拡大縮小を行うとともに、デフォルメ後の道路形状中の配置位置と配置方向に応じたデフォルメ後のオブジェクト3次元座標を算出する拡大縮小手段232とを有する。
次に、動作について説明する。
描画データを選択する際に、膨大な3次元モデルの中から、表示に必要な3次元モデル及びそのデータ(3次元形状データやテクスチャデータ等)を選択抽出可能とするための重要度を生成する動作は、実施の形態3と同様である。
以下では、略地図処理部170の動作について説明する。
情報取得部180では、出発地や目的地の位置情報を取得する。具体的な動作は、実施の形態7と同様である。
経路探索部190は、前記情報取得部180から出発地と目的地の位置情報を受け取ると、記憶部10に格納されている地図データやネットワークデータを用いて、出発地から目的地に至る経路を検索する。具体的な動作は、実施の形態7と同様である。
検索部160では、前記経路探索部190から経路データを受け取ると、記憶部10に格納されている3次元地図データから経路中の主要なオブジェクト(目印となる建物や信号等)や、経路に関わる道路等、経路に関連するオブジェクトの3次元データを検索して取得する。具体的な動作は、実施の形態7と同様である。
道路デフォルメ部220では、前記経路探索部190から経路データを受け取ると、経路中の各道路長の伸張や交差点道路の簡易作成等を行い、経路に関する、デフォルメした道路形状を作成する。具体的な動作は、実施の形態7と同様である。
視点視線情報生成部270では、前記記憶部10から、デフォルメ後の経路データを取得すると、略地図を表示する3次元空間内の視点情報(視点位置や視線方向等)を生成する。
オブジェクトデフォルメ部230では、前記検索部160から、経路付近の主要な建物等の3次元データを受け取り、前記道路デフォルメ部220からデフォルメ後の経路データとデフォルメ後の道路形状を受け取ると、デフォルメ後のノードの位置や道路の形状に対応して、建物等のオブジェクトが見やすいスケールとなるように大きさを拡大縮小するとともにオブジェクトを交差点の位置に応じて再配置する。
配置情報算出手段231では、前記道路デフォルメ部220においてデフォルメした道路に対応して、デフォルメ前のノード位置と建物との距離に基づいて建物の配置距離を算出し、経路に対する配置方向を算出する。具体的な動作は、実施の形態7と同様である。
表示に基づく拡大縮小手段232では、オブジェクトの表示結果に基づいてオブジェクトの拡大縮小を行い、デフォルメ後の道路形状中の配置位置と配置方向に応じたデフォルメ後のオブジェクト3次元座標を算出する。
拡大縮小手段232によるオブジェクトの拡大縮小処理を、図41、図42を用いて具体的に説明する。
図41は、前記初期視点情報生成手段271において生成した視点情報に基づいて略地図を表示した様子である(A〜Eは説明用の注記)。この状態において、まず、最初の移動方向に対する道路線分付近に存在する建物の表示画素数の和を算出する。図41の場合、建物A〜Eの表示画素数の和を算出する。算出した和を理想値と比較し、和<理想値であり、且つ、和と理想値との差が閾値以上である場合には、建物A〜Eの各建物の拡大率を上げる。例えば、各建物を1.2倍に拡大し、再度表示する。表示後、同様に、建物A〜Eの表示画素数の和を算出し、算出した和を理想値と比較する。和<理想値であり、且つ、和と理想値との差が閾値以上である場合には、建物A〜Eの各建物の拡大率を上げ、例えば、各建物を1.4倍に拡大する。
このようにして、最初の移動方向に対する道路線分付近に存在する建物の表示画素数の和が理想値に近づくまで、表示による判定と拡大率の増加を繰り返す。大きく表示されすぎた場合には、適宜縮小する。
同様にして、経路中の他の道路線分付近に存在する建物に関しても、拡大縮小を行う。例えば、図41の2本目の道路線分に関して、図42に示すように、建物F、G、Hを拡大する。理想値や閾値は、任意の値を予め記憶部10に格納しておく。経路を構成する道路線分毎に異なる値を設定することで、注目する道路線分付近の建物のみを他の建物よりも強調して表示することができる。
なお、本実施の形態8では、建物C〜Eを、最初の移動方向に対する道路線分の付近に存在する建物とみなして拡大率を算出しているが、2本目の道路線分に関する建物とみなしてもよく、どのオブジェクトをどの道路線分の付近とみなして拡大縮小するのかは任意である。また、上記は、前記初期視点情報生成手段271において生成した視点情報に基づいて略地図を表示した結果を利用し、オブジェクトの拡大縮小を行う例を示したが、前記移動部分対応視点情報生成手段272において生成した視点情報に基づいて略地図を表示した結果を利用し、オブジェクトの拡大縮小を行ってもよい。例えば、図41において、2本目の道路線分に関して、建物F、G、Hを拡大する際には、2本目の道路線分に関する移動方向が分かり易い視点位置からの表示(図39)を用いてもよい。
略地図作成部240では、記憶部10に格納された、デフォルメ後の道路形状データ、デフォルメ後のオブジェクトデータを統合し、経路や建物等から成る略地図データを作成する。具体的な動作は、実施の形態7と同様である。
以上のように、実施の形態8に係る情報生成装置100では、3次元モデルを用いた経路案内を行う場合に、経路や経路中の目印オブジェクトを簡易的に分かりやすく表現した略地図を作成し、歩行者に提供することが出来る。このとき、移動方向の目印となる建物を表示する大きさを、画面上での表示結果に基づいて決めることが出来るので、画面に表示した際に見えにくいことがなく、分かり易い略地図を使用することが出来る。
実施の形態9.
(端末でウォークスルー表示と略地図表示可能な情報配信システム)
実施の形態9は、LANやインターネット、無線LAN等のネットワークにより、データの送受信を行う配信装置と表示装置400を有する情報配信システムに関する情報配信システムの実施の形態である。
図43は、この発明の実施の形態9に係る情報配信システムにおける配信装置の構成を示すブロック図である。
図43に示す情報配信システムにおける配信装置300は、道路や建物等のオブジェクトの3次元データ、2次元地図、道路ネットワークデータ、パラメータ等を記憶する記憶部10と、3次元形状データや色情報、属性情報等、3次元モデルに関するデータを用いて、各オブジェクトや、複数のオブジェクトをまとめたまとまりに設定する重要度を3次元空間内の方向と対応付けて算出する、実施の形態3と同様な構成の重要度生成部20と、空間データを検索する検索部160と、3次元空間内における視点位置や視線方向等、視点に関する情報を生成する視点情報生成部50と、オブジェクトの3次元モデルをレンダリングして表示する表示部60と、3次元空間内における地点と方向との対応関係を生成する方向定義部90と、3次元モデルに関する情報や、オブジェクト群やオブジェクトのポリゴンに対して算出した重要度を管理するインデックスを生成し、記憶部10に格納する、実施の形態4と同様な構成のインデックス生成部110と、3次元空間内における方向と関連づいた重要度を用いて、オブジェクトのデータを抽出する、実施の形態4と同様な構成の選択的抽出部120と、ネットワークを介して端末装置とデータの送受信を行う通信制御部130と、経路や経路中の目印となる建物等を立体的に且つ簡易的に表現した略地図を生成する略地図処理部170とを備えている。
ここで、略地図処理部170は、出発地から目的地に至る経路検索を行う経路探索部190と、出発地から目的地に至る経路や経路中の目印となるオブジェクトを立体的に表現できる略地図を作成する略地図情報生成部210とを備えている。
略地図情報生成部210は、前記経路探索部190から経路データを受け取ると、経路中の各道路長の伸張を行い、経路が見やすくなるようにデフォルメし、道路の簡易形状を作成する道路デフォルメ部220と、略地図の地図要素(建物や道路)の3次元モデルを3次元空間内で見る際の視点情報を生成する視点視線情報生成部270と、前記道路デフォルメ部220で生成されたデフォルメ後の道路に対応して、建物等のオブジェクトが見やすいスケールとなるように大きさを拡大縮小し、オブジェクトを交差点等の位置に対応して再配置するオブジェクトデフォルメ部230と、前記通信制御部130から位置情報を受け取ると、受け取った位置情報の地点が、経路全体の中のどの移動部分に対応するのかを取得する移動部分取得部250と、位置情報に基づいて、略地図上に表示する、現在地に対応する地点の3次元座標を算出する現在地算出部260と、経路中の主要な道路及び建物を立体的に表現した略地図を生成する略地図作成部240とを備えている。
道路デフォルメ部220は、経路が見やすくなるように経路を構成する各道路長を伸張するデフォルメ手段221と、デフォルメ後の経路データを用いて道路の簡易的な形状を作成する簡易形状作成手段222とを有する。
視点視線情報生成部270は、出発地からの移動方向が分かり易い位置・方向の視点情報を生成する初期視点情報生成手段271と、出発地から目的地に至る経路において、経路中の各移動部分に対して、移動部分における移動方向や次の移動部分への曲がり角の目印が分かり易い視点位置・方向から略地図を表示可能な視点情報を生成する移動部分対応視点情報生成手段272とを有する。
オブジェクトデフォルメ部230は、前記道路デフォルメ部220においてデフォルメした道路に対応して、オブジェクトの配置位置と配置方向を算出する配置情報算出手段231と、経路に対して建物等のオブジェクトが見やすい大きさになるように拡大縮小を行うとともに、デフォルメ後の道路形状中の配置位置と配置方向に応じたデフォルメ後のオブジェクト3次元座標を算出する拡大縮小手段232とを有する。
なお、配信装置300と通信を行う表示装置400の構成は、図16に示す実施の形態6と同様である。
次に、動作について説明する。
まず、配信装置300では、表示装置400が描画するデータを選択する際に、膨大な3次元モデルの中から表示に必要な3次元モデル及びそのデータ(3次元形状データやテクスチャデータ等)を選択抽出可能とするための重要度を生成し、重要度を用いた抽出を行うためのインデックスを生成しておく。重要度の設定に関する具体的な動作は、実施の形態3と同様である。また、インデックス生成に関する具体的な動作は、実施の形態4と同様である。
次に、歩行者ナビゲーションを例とした動作について述べる。歩行者は携帯電話等のモバイル端末を表示装置400として有している。
図16に示す表示装置400において、検出部140は、表示装置400の表示性能や画面サイズ、表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを検出する。具体的な動作は、実施の形態6と同様である。検出結果は、通信制御部130からネットワークを介して配信装置300に送信される。
図16に示す表示装置400において、歩行者がペンやダイヤル、キー操作等により、3次元空間内における視点の位置や移動方向、1秒あたりの移動変位量等を入力すると、入力された情報に基づいて視点情報生成部50が視点位置と方向等、視点に関する情報を取得する。取得した情報は、視点判定部150に送る。
視点判定部150では、前記視点情報生成部50から視点位置や方向等、視点に関する情報を受け取ると、3次元空間内の特定の地点及び地点間の方向ベクトルと、前記視点情報生成部50から受け取った視点との位置及び移動方向とを比較し、配信装置300へのデータ要求を行うか否かの判定を行う。具体的な動作は、実施の形態6と同様である。配信装置300にデータ要求を行う判定を下した場合には、データ要求を行うメッセージとその時の視点情報とを通信制御部130に送る。
通信制御部130は、前記検出部140から、表示装置400の表示性能や画面サイズ、表示装置400が接続しているネットワークの通信速度等、表示装置400の環境に関するデータを受け取ると、ネットワークを介して配信装置300に送る。また、前記視点判定部150から視点情報を受け取ると、これらのデータを、ネットワークを介して配信装置300に送る。
配信装置300では、通信制御部130が、表示装置400から送られてきた表示装置400の環境に関するデータ、視点情報を受け取ると、選択的抽出部120に送る。
選択的抽出部120では、通信制御部130から、表示装置400の環境に関するデータ、視点情報を受け取ると、記憶部10が有しているインデックスを用いて、重要度を利用したデータの抽出を行う。抽出の具体的な動作は、実施の形態4と同様である。なお、選択的抽出部120の領域決定手段121では、視点付近としてみなす領域の大きさを回線の伝送速度に応じても変えることが出来る。端末の表示性能や画面サイズと同様に対応関係を記憶部10に格納しておく。
通信制御部130は、選択的抽出部120から抽出結果を受け取ると、ネットワークを介して表示装置400にデータを送信する。具体的な動作は、実施の形態5と同様である。このようにして、歩行者は、指定した3次元空間内の視点位置に応じた都市の景観を歩行者が有する表示装置400上に3次元表示することができる。
一方、歩行者ナビゲーションにおいて、歩行者は、都市の景観を地上から表示して、現在地や注目する場所の付近を確認するほかに、出発地から目的地に至る経路を確認したり、移動方向や移動中の目印となるオブジェクトを確認したり、歩行中の現在地と経路との位置関係を確認したりしたい場合が考えられる。本実施の形態における情報配信システムでは、歩行者が表示装置400から送信した要求に応じて、地上からの景観表示と、経路を簡易的に表現した略地図とを表示装置400上に適宜切り替えて表示する。以下に、この具体的な動作について説明する。
歩行者は、出発地において、ペンやダイヤル、キー等の操作により、出発地と目的地を入力する。2次元地図が表示可能な場合には、2次元地図上で出発地や目的地を指定しても良い。また、予め用意されている地点の中から選択してもよい。また、表示装置400がGPS等の位置取得可能な機能を備えている場合には、この機能により取得した位置情報を出発地の位置情報としてもよい。このようにして取得した出発地と目的地に関する位置情報は、配信装置300に送信される。
配信装置300では、通信制御部130が表示装置400から出発地と目的地に関する位置情報を受け取ると、経路探索部190に渡す。
経路探索部190では、前記情報取得部180から出発地と目的地の位置情報を受け取ると、記憶部10に格納されている地図データやネットワークデータを用いて、出発地から目的地に至る経路を検索する。具体的な動作は、実施の形態7と同様である。
検索部160では、前記経路探索部190から経路データを受け取ると、記憶部10に格納されている3次元地図データから経路中の主要なオブジェクト(目印となる建物や信号等)や、経路に関わる道路等、経路に関連するオブジェクトの3次元データを検索して取得する。具体的な動作は、実施の形態7と同様である。
略地図情報生成部210では、経路及び経路に関するオブジェクトを分かりやすく表現した略地図を作成する。具体的な動作は、実施の形態7、実施の形態8と同様である。このようにして作成した略地図は、通信制御部130から表示装置400に配信して表示することが出来、歩行者は出発地において、経路を簡易的に示した略地図を用いて経路を視覚的に把握することが出来る。
歩行者が出発地から歩行を開始した後、途中の地点で、現在地が正しい経路上であるか、また、目的地まで今後どのように移動したらよいのかを確認したいとする。地上からの景観3次元表示は、歩行者が、キー操作等によって3次元空間内で視点を移動させると、表示装置400の視点情報生成部50が入力された情報に基づいて視点に関する情報を生成する。生成した情報は、通信制御部130から配信装置300に送信する。
配信装置300では、表示装置400から3次元空間内で景観表示を行う際の視点に関する情報を受け取ると、選択的抽出部120が重要度を用いて空間データの抽出を行う。抽出したデータは通信制御部130から表示装置400に送信される。これにより、歩行者は、表示装置400上で歩行中に3次元空間内の任意地点の景観表示を行うことが出来る。
このとき、歩行者は、景観表示を行った地点が経路上のどの辺りに相当するのか等、地点と経路との位置関係を略地図を用いて確認することが出来る。具体的には、表示装置400の前記視点情報生成部50が生成した視点に関する情報を配信装置300が受け取ると、移動部分取得部250では、受け取った視点情報に対応する地点が、経路中のどの移動部分に対応するのかを取得する。どの移動部分に対応するのかの判定は、地点の座標とデフォルメ前の経路データを用い、経路を構成する各移動部分と現在地との距離を算出して、現在地に最も近い移動部分を取得することで行う。例えば、図44において、経路NMVWは、デフォルメ前の3次元データを用いて出発地から目的地に至る経路を示したものであり、実空間の3次元座標に対応している。現在地として地点Aの位置座標を受け取った場合、経路を構成する移動部分(NM間、MV間、VW間)のうち、地点Aに最も近い移動部分としてNM間の移動部分を取得する。取得した移動部分は、現在地算出部260、略地図作成部240に渡す。
現在地算出部260では、表示装置400の前記視点情報生成部50が生成した視点に関する情報を受け取ると、受け取った視点情報に対応する地点を略地図上に表示できるようにするために、デフォルメ後の経路上での3次元座標を算出する。図44、図45を用いて具体的に説明する。図44は、デフォルト前の経路を構成するノード(地点)N,M,V,Wを示し、図45は、デフォルト後の経路を構成するノード(地点)I,J,K,Lを示す。なお、デフォルト後のノードI,J,K,Lは、デフォルト前のノードN,M,V,Wにそれぞれ対応している。
今、表示装置400から受け取った視点情報に対応する地点が、図44の地点Aであったとする。また、前記移動部分取得部250から、地点Aが相当する移動部分がNM間であることを取得しているとする。すると、記憶部10に格納されている、デフォルメ後の経路データ及び道路形状データを参照して、デフォルメ後の略地図上で地点Aに相当する地点Pの座標を式(2)により算出する(図44、図45を参照)。
なお、ベクトルOPはデフォルト前の地点Aに対応するデフォルト後の地点Pの座標、ベクトルOIは地点Iの座標(地点Aは、図44のデフォルト前の状態でノード間NMに対応し、図45のデフォルト後の状態ではノード間IJに対応するため、このノード間の基準として地点Iの座標を算出する)、|NM|はノードNM間の距離、|NA|はノードNA間の距離を示す。
同様にして、端末装置から受信した現在地が図44の地点Bである場合、略地図上で表示する、地点Bに相当する地点Qの座標は式(3)で算出することができる(図44、図45を参照)。
なお、ベクトルOQは地点Qの座標、ベクトルOJは地点Jの座標、|MB|はノードMB間の距離、|MV|はノードMV間の距離を示す。
算出した現在地に相当する地点の座標は、記憶部10に格納するとともに、略地図作成部240に渡す。
略地図作成部240では、前記現在地算出部260から、現在地を略地図上に表示する際の3次元座標を受け取ると、この地点を表記した略地図データを作成する。作成した略地図データは、通信制御部130から表示装置400に配信し、表示装置400では経路中に地点を表記した略地図を表示することができる。
以上のように、実施の形態9に係る情報配信システムでは、歩行者ナビゲーションにおいて、歩行者が実風景と見比べることが出来る地上からの景観を少ないデータ量で配信表示できる他に、出発地から目的地に至る経路や経路中の目印建物を立体的かつ簡易的に表現できる略地図を作成し、歩行者に配信することが出来る。このため、歩行者は出発地で経路全体を把握し、また、歩行中に略地図を用いて経路における現在地の位置や、今後の移動方向等を確認することが出来る。この際に、地上からの景観表示と略地図表示とを連携して使用でき、歩行者に分かり易い経路案内を行うことが出来る。
実施の形態10.
(情報生成装置。オブジェクト群の簡易形状を作成)
実施の形態10は、複数のオブジェクトをまとめた結果に基づいて、オブジェクト群の簡易的な形状を作成する実施の形態である。
図46は、この発明の実施の形態10に係る情報生成装置の構成を示すブロック図である。
図46に示す情報生成装置100は、道路や建物等のオブジェクトの3次元データや画像等を記憶する記憶部10と、3次元形状データやテクスチャデータ、色情報、属性情報等、3次元モデルに関するデータを用いて、各オブジェクトや複数のオブジェクトをまとめたまとまりに設定する重要度を3次元空間内の方向と対応付けて算出する、実施の形態1と同様な構成の重要度生成部20と、遠方からオブジェクトを見た際にシルエットとなるオブジェクトに基づいて作成した、複数のオブジェクトをまとめた各まとまりに対して、簡易的な3次元モデルを作成するオブジェクト群簡易モデル作成部280とを備えている。
次に、動作について説明する。
記憶部10は、道路や建物等のオブジェクトの3次元データや画像等を記憶する。具体的な動作は実施の形態1と同様である。重要度生成部20では、複数のオブジェクトをまとめたオブジェクト群や、オブジェクトのポリゴンに対する重要度を算出する。具体的な動作は、実施の形態1と同様である。
オブジェクト群簡易モデル作成部280では、遠方からオブジェクトを見た際にシルエットとなるオブジェクトに基づいて作成した、複数のオブジェクトをまとめた各まとまりに対して、簡易的な3次元モデルを作成する。簡易的な3次元モデルは、オブジェクト群に属するオブジェクトの外接直方体を求めることで生成する。具体的には、図47の場合、建物B、C、Dが一つの建物群となっている。そこで、これらの建物に外接する直方体を求めると図47に示す簡易3次元モデルを作成することが出来る。簡易3次元モデルにおいて、ポリゴンアには、建物B、C、Dのテクスチャを統合したテクスチャを作成し、貼り付ける。作成した3次元モデル(形状データ及びテクスチャデータ)は、ファイルに出力できる。
以上のように、実施の形態10に係る情報生成装置では、シルエットとなるオブジェクトに基づいて作成したオブジェクト群の簡易3次元モデルを作成することが出来るので、LODにおいて視点から遠方のオブジェクトを簡易的に表現する際に利用することが出来る。
なお、上述した実施の形態4〜実施の形態9では、オブジェクトのポリゴンや、複数のオブジェクトをまとめたオブジェクト群に重要度を設定し、選択的抽出部120で重要度を利用したデータの抽出を行うが、記憶部10に予めテクスチャ解像度や形状の詳細度が異なるモデルを複数種類記憶しておき、重要度に応じて、3次元モデルの詳細度やテクスチャ詳細度を変えて抽出しても良い。
また、上述した実施の形態1〜実施の形態10は、都市空間を対象とした実施の形態であるが、対象とする3次元空間は道路や建物等から成る都市空間に限らない。また、建物を対象として重要度を算出する実施の形態を示しているが、重要度を算出する対象は建物に限定しない。