JP4984878B2 - 目的地案内装置 - Google Patents
目的地案内装置 Download PDFInfo
- Publication number
- JP4984878B2 JP4984878B2 JP2006348281A JP2006348281A JP4984878B2 JP 4984878 B2 JP4984878 B2 JP 4984878B2 JP 2006348281 A JP2006348281 A JP 2006348281A JP 2006348281 A JP2006348281 A JP 2006348281A JP 4984878 B2 JP4984878 B2 JP 4984878B2
- Authority
- JP
- Japan
- Prior art keywords
- destination
- vehicle
- route
- current position
- guidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3679—Retrieval, searching and output of POI information, e.g. hotels, restaurants, shops, filling stations, parking facilities
- G01C21/3685—Retrieval, searching and output of POI information, e.g. hotels, restaurants, shops, filling stations, parking facilities the POI's being parking facilities
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Instructional Devices (AREA)
- Traffic Control Systems (AREA)
Description
例えば、目的地が町中にある駐車場のように進入口が限られるようなものであった場合、目的地への案内は正確に行われたにもかかわらず、目的地(駐車場)への進入路が見つからないため、目的地近傍で迷走してしまうといった状況が発生することがある。
目的地設定手段(60)は、複数の目的地を訪れる順番とともに設定するためのものであり、提示手段(70,72)は、目的地設定手段(60)で設定された目的地までの案内のための情報を提示するものである。
目的地案内手段(50)は、現在位置検出手段(20)で検出された車両の現在位置から目的地設定手段(60)で設定された複数の目的地までの経路を設定された順番に算定し、算定した経路を提示手段(70,72)に提示させる。
また、目的地案内手段(50)は、迷走判定手段(50)で、車両が目的地の位置から所定の範囲内にあるときに、車両が迷走していると判定されなかった場合は、目的地に到着したと判定して次の目的地までの経路を算定し、該次の目的地までの経路を提示手段(70,72)に提示させ、迷走判定手段(50)で、車両が目的地の位置から所定の範囲内にあるときに、車両が迷走していると判定された場合には、目的地に到着したことを判定せず、次の目的地までの経路を算定せずに、再度目的地までの経路を提示手段(70,72)に提示させる。
そして、このように構成された目的地案内装置によれば、車両が迷走していなければ、目的地に到着したと判定され、次の目的地までの経路が算定され、算定された経路が提示手段(70,72)に提示される。逆に、車両が迷走していると判定されたときには目的地に到着したと判定されず、次の目的地までの経路が算定されないので、次の目的地までの経路が提示手段(70,72)に提示されない。
したがって、複数の目標が、訪れる順番とともに設定されており、各目的地までの経路が順番に案内される目的地案内装置の場合、迷走せずに1つの目的地に到着すれば、次の目的地が提示される。一方、目的地近傍で迷走している間は、目的地到着判定がされないので、次の目的地への経路案内がされることがない。
車両が迷走中に、次の目的地への経路案内がされることがないので、運転者が現在迷走しながら探している目的地までの経路が再設定されたものと誤解したりすることがなくなるので、運転者にとって使いやすい目的地案内装置となる。
さらに、車両が迷走していると判定された場合には、目的地に到着したと判定しないとともに、請求項10(請求項9の誤記)に記載のように、再度、その目的地までの経路を提示手段(70,72)に提示するようにするとより使いやすい目的地案内装置となる
ここで、「その目的地」とは、迷走していると判定される前に案内されていた目的地を意味している。
また、車両が迷走していることを判定する他の迷走判定手段(50)を備える目的地案内装置としては、請求項2に記載のようなものが考えられる。すなわち、前述の地図情報データベース(10)及び現在位置検出手段(20)に、車両の方位を検出する方位検出手段(80)及び迷走判定手段(50)を備える。
ところで、車両が迷走した場合には、比較的短い時間内に同一地点を何度も通過する場合がある。そこで、請求項3に記載のように、目的地の位置を設定可能な地図情報が格納された地図情報データベース(10)と、車両の現在位置を検出する現在位置検出手段(20)と、現在位置検出手段(20)で検出された車両の現在位置が前記地図情報データベース(10)に設定された目的地の位置から所定の範囲内にあるときに、現在位置検出手段(20)で検出された車両の位置が所定の時間内に目的地の位置から所定の範囲内において同一の場所を所定回数以上通過した場合に、車両が迷走していると判定する迷走判定手段(50)と、を備えるようにするとよい。
また、車両が迷走したときに運転者が特徴的に示す身体的行動の変化としては、顔や身体の一部が所定時間内に通常の運転状態のときに比べ異なる動きをする場合もある。例えば、目的地や目的地を見つけるための目印となるものを目視で認識するために顔を左右に動かす、いわゆる「きょろきょろ」する状態になったり、上半身を大きく左右に動かしたり、上半身をねじったりする場合がある。
そこで、請求項13に記載のように、目的地設定手段(60)によって、1つの目的地しか設定されていない場合、目的地案内手段(50)は、迷走判定手段(50)で車両が迷走していると判定されたときであっても、目的地に到着したことを判定するようにするとよい。
[第1実施形態]
(車両案内装置1の構成)
第1実施形態として、図1、図2、図3及び図4に基づいて、車両の迷走判定を行う車両案内装置1について説明する。
駐停車用機器信号入力装置40は、車両の駐車又は停車の際に操作される機器(駐停車用機器)が操作されたことを検出するものである。駐停車用機器とは、例えば、パーキングブレーキ42、ハザードランプスイッチ44(以下、ハザードランプSW44とも呼ぶ。)などである。
例えば、車両が停止し、運転者がパーキングブレーキ42を引いたときにパーキングブレーキ42が作動する位置が予め設定されており、パーキングブレーキ42がその設定位置になったことを検出し、検出信号を制御部50へ出力する。また、ハザードランプSW44の場合は、ハザードランプSW44が押されたことを検出し、検出信号を制御部50へ出力する。
制御部50は、図示しないCPU、ROM、RAM及びI/Oなどから構成され以下の(ア)〜(カ)に示す処理を行う。
(オ)表示や報知の後タッチセンサ60を介して目的地案内を終了する旨の指令の入力があった場合には、目的地案内を終了し、目的地案内を終了しない旨の指令の入力があった場合には、目的地に到着したことを判定しない。
(制御部50での処理)
次に、制御部50において実行される目的地到着判定処理を図2に基づいて説明する。図2は、制御部50において実行される処理のフローチャートである。
続くS125では、判定なしフラグがONであるか否かが判定される。つまり、迷走判定処理において、迷走判定が行われたか否かが判定される。そして、判定なしフラグがON、つまり、迷走判定が行われなかったと判定された場合(S125:Yes)は、S160において判定なしフラグがリセットされ、処理がS100に戻され、本目的地到着判定処理が繰り返される。
S130では、S120の迷走判定処理の結果、迷走判定フラグがONであるか否か、つまり、迷走しているか否かの判定が行われる。迷走判定フラグがONであると判定された場合(S130:Yes)、つまり、迷走している場合には、処理がS155へ移行される。
次に、図3に基づいて、迷走判定処理について説明する。図3に示す迷走判定処理は、目的地判定処理のサブルーチンである。
S220では、駐停車用機器信号入力装置40からパーキングブレーキ42の状態が取得され、続くS225において、パーキングブレーキ42が作動している状態であるか否かが判定される。
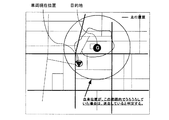
以上のような車両案内装置1によれば、図4に示すように、車両が目的地近傍で迷走していることが判定できる。
次に、第2実施形態として、図5、図6、図7及び図8に基づいて、車両の進行方向に基づいて車両の迷走判定を行う車両案内装置2について説明する。なお、第2実施形態における車両案内装置2の構成は第1実施形態における車両案内装置1と類似しているので、同じ構成要素には同じ符号を付して説明を省略する。
図5は、車両案内装置2の概略の構成を示すブロック図である。車両案内装置2は、図5に示すように、図2に示す第1実施形態の車両案内装置1の車速検出器30及び駐停車用機器信号入力装置40に代え、ジャイロ80を備えた構成となっている。
制御部50では、第1実施形態における目的地判定処理(図2参照)に代えて、図6に示す目的地判定処理が行われている。図6に示す目的地判定処理では、S300において、GPS車載器20から車両の現在位置が取得され、続くS305において、タッチセンサ60から目的地が取得される。
続くS330では、判定なしフラグがONであるか否かが判定される。つまり、迷走判定処理において、迷走判定が行われたか否かが判定される。そして、判定なしフラグがON、つまり、迷走判定が行われなかったと判定された場合(S330:Yes)は、S375において判定なしフラグがリセットされ、処理がS300に戻され、本目的地到着判定処理が繰り返される。
S335では、S325の迷走判定処理の結果、迷走判定フラグがONであるか否か、つまり、迷走しているか否かの判定が行われる。迷走判定フラグがONであると判定された場合(S335:Yes)、つまり、迷走している場合には、処理がS360へ移行される。
次に、図7に基づいて、迷走判定処理について説明する。迷走判定処理は、目的地判定処理のサブルーチンである。
以上のような車両案内装置2によれば、目的地近傍で車両が迷走していることが判定できる。
さらに、迷走判定がされてから再度その目的地までの経路を提示するまでの時間を設定することが可能となっているので、表示装置70に表示させたり音声出力装置72によって報知したりして、経路を提示するまでの時間を運転者の特性や好みに合わせて設定できる。したがって、運転者にとって使いやすい車両案内装置2となる。
次に、車両が目的地近傍で同じ地点を通過しているか否かにより迷走判定を行う車両案内装置について説明する。この車両案内装置の構成及び制御部50(図5参照)における目的地判定処理は、第2実施形態の車両案内装置と同じであるため、構成及び目的地判定処理の説明は省略する。
図9に基づいて、第3実施形態における迷走判定処理について説明する。迷走判定処理は、第2実施形態の迷走判定処理(図7参照)と類似しているため、同じ処理には同じステップ番号を付して説明を省略する。
以上のような車両案内装置によれば、図10に示すようにして、目的地近傍で車両が迷走していることが判定できる。
次に、車両の運転者の身体の動きの変化から迷走判定を行う車両案内装置3について図11及び図12に基づいて説明する。この車両案内装置の構成は第2実施形態の車両案内装置(図5参照)と類似であるため、同じ構成要素には同じ符号を付し、その説明は省略する。また、制御部50(図5参照)における目的地判定処理は、第2実施形態の車両案内装置と類似であるため、目的地判定処理の説明は省略する。
図11は、車両案内装置3の概略の構成を示すブロック図である。車両案内装置3は、図11に示すように、第2実施形態の車両案内装置2(図5参照)のジャイロ80の代わりに車室内カメラ90及びマイクロホン92を備えている。
次に、第4実施形態における迷走判定処理について図12に基づき説明する。迷走判定処理は、第2実施形態の迷走判定処理(図7参照)と類似しているため、同じ処理には同じステップ番号を付して説明を省略する。
続く、S440においてジャイロ80から車両方位Bが取得される代わりに、車室内カメラ90からカメラ画像が取得される。
車室内カメラ90によって運転者の画像を取得し、その運転者の動きを画像認識することによって、運転者の通常の運転状態に比べ異なる動きをするという運転者の示す特徴的な身体的行動の変化を検出できる。したがって、車両が迷走していることを判定できる。
次に、運転者の発する声から迷走判定を行う車両案内装置について図13に基づいて説明する。この車両案内装置の構成は第4実施形態の車両案内装置3(図11参照)と同じであり、制御部50(図11参照)における目的地判定処理は、第2実施形態の車両案内装置と同じであるため、構成と目的地判定処理の説明は省略する。
第5実施形態における迷走判定処理について図13に基づき説明する。迷走判定処理は、第4実施形態の迷走判定処理(図11参照)と類似しているため、同じ処理には同じステップ番号を付して説明を省略する。
このように、特定の言葉を発するという、運転者が示す特徴的な身体的行動の変化をマイクロホン92によって検出することによって車両が迷走していることを判定できる。
例えば、運転者に対する情報の提示は、表示装置70と音声出力装置72の両方を用いてもよいが、いずれかを単独で使用してもよい。
Claims (11)
- 目的地の位置を設定可能な地図情報が格納された地図情報データベースと、
車両の現在位置を検出する現在位置検出手段と、
前記車両の速度を検出する車速検出手段と、
前記車両の駐車又は停車の際に操作される機器が操作されたことを検出する駐停車用機器操作検出手段と、
前記現在位置検出手段で検出された前記車両の現在位置が前記地図情報データベースに設定された前記目的地の位置から所定の範囲内にあるときに、前記車速検出手段で検出された前記車両の速度が所定の値以上であるか又は前記車両の速度が前記所定の値より小さく停車中であっても、前記駐停車用機器操作検出手段で前記車両の駐車又は停車の際に操作される機器が操作されたことが検出されず、前記車両をすぐに発進できる状態である場合に、前記車両が迷走していると判定する迷走判定手段と、
複数の目的地を訪れる順番とともに設定するための目的地設定手段と、
前記目的地設定手段で設定された目的地までの案内のための情報を提示する提示手段と、
前記現在位置検出手段で検出された前記車両の現在位置から前記目的地設定手段で設定された複数の目的地までの経路を設定された順番に算定し、算定した経路を前記提示手段に提示させる目的地案内手段と、
を備え、
前記目的地案内手段は、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定されなかった場合は、前記目的地に到着したと判定して次の目的地までの経路を算定し、該次の目的地までの経路を前記提示手段に提示させ、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定された場合には、前記目的地に到着したことを判定せず、次の目的地までの経路を算定せずに、再度前記目的地までの経路を前記提示手段に提示させることを特徴とする目的地案内装置。 - 目的地の位置を設定可能な地図情報が格納された地図情報データベースと、
車両の現在位置を検出する現在位置検出手段と、
前記車両の方位を検出する方位検出手段と、
前記現在位置検出手段で検出された前記車両の現在位置が前記地図情報データベースに設定された前記目的地の位置から所定の範囲内にあるときに、前記方位検出手段で検出された前記車両の方位が所定の角度以上変化した場合に、前記車両が迷走していると判定する迷走判定手段と、
複数の目的地を訪れる順番とともに設定するための目的地設定手段と、
前記目的地設定手段で設定された目的地までの案内のための情報を提示する提示手段と、
前記現在位置検出手段で検出された前記車両の現在位置から前記目的地設定手段で設定された複数の目的地までの経路を設定された順番に算定し、算定した経路を前記提示手段に提示させる目的地案内手段と、
を備え、
前記目的地案内手段は、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定されなかった場合は、前記目的地に到着したと判定して次の目的地までの経路を算定し、該次の目的地までの経路を前記提示手段に提示させ、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定された場合には、前記目的地に到着したことを判定せず、次の目的地までの経路を算定せずに、再度前記目的地までの経路を前記提示手段に提示させることを特徴とする目的地案内装置。 - 目的地の位置を設定可能な地図情報が格納された地図情報データベースと、
車両の現在位置を検出する現在位置検出手段と、
前記現在位置検出手段で検出された前記車両の現在位置が前記地図情報データベースに設定された前記目的地の位置から所定の範囲内にあるときに、前記現在位置検出手段で検出された前記車両の位置が所定の時間内に前記目的地の位置から所定の範囲内において同一の場所を所定回数以上通過した場合に、前記車両が迷走していると判定する迷走判定手段と、
複数の目的地を訪れる順番とともに設定するための目的地設定手段と、
前記目的地設定手段で設定された目的地までの案内のための情報を提示する提示手段と、
前記現在位置検出手段で検出された前記車両の現在位置から前記目的地設定手段で設定された複数の目的地までの経路を設定された順番に算定し、算定した経路を前記提示手段に提示させる目的地案内手段と、
を備え、
前記目的地案内手段は、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定されなかった場合は、前記目的地に到着したと判定して次の目的地までの経路を算定し、該次の目的地までの経路を前記提示手段に提示させ、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定された場合には、前記目的地に到着したことを判定せず、次の目的地までの経路を算定せずに、再度前記目的地までの経路を前記提示手段に提示させることを特徴とする目的地案内装置。 - 目的地の位置を設定可能な地図情報データベースと、
車両の現在位置を検出する現在位置検出手段と、
前記車両が迷走した際に前記車両の運転者が特徴的に示す身体的行動を検出する運転者行動検出手段と、
前記現在位置検出手段で検出された前記車両の現在位置が前記地図情報データベースに設定された前記目的地の位置から所定の範囲内にあるときに、前記運転者行動検出手段で検出された前記運転者の特徴的な身体的行動に変化があるか否かを判定し、前記運転者の特徴的な身体的行動に変化がある場合に、前記車両が迷走していると判定する迷走判定手段と、
複数の目的地を訪れる順番とともに設定するための目的地設定手段と、
前記目的地設定手段で設定された目的地までの案内のための情報を提示する提示手段と、
前記現在位置検出手段で検出された前記車両の現在位置から前記目的地設定手段で設定された複数の目的地までの経路を設定された順番に算定し、算定した経路を前記提示手段に提示させる目的地案内手段と、
を備え、
前記目的地案内手段は、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定されなかった場合は、前記目的地に到着したと判定して次の目的地までの経路を算定し、該次の目的地までの経路を前記提示手段に提示させ、
前記迷走判定手段で、前記車両が前記目的地の位置から前記所定の範囲内にあるときに、前記車両が迷走していると判定された場合には、前記目的地に到着したことを判定せず、次の目的地までの経路を算定せずに、再度前記目的地までの経路を前記提示手段に提示させることを特徴とする目的地案内装置。 - 請求項4に記載の目的地案内装置において、
前記運転者行動検出手段は、前記車両が迷走した際に前記車両の運転者が特徴的に示す身体的行動として、前記運転者の発する特定の言葉を検出することを特徴とする目的地案内装置。 - 請求項4に記載の目的地案内装置において、
前記運転者行動検出手段は、前記運転者の顔又は身体の一部の画像を取得する撮像手段を備え、前記撮像手段で取得した前記運転者の顔又は身体の一部の画像に基づき、前記運転者の顔又は身体の一部が通常の運転状態に比べ異なる動きをすることを認識することによって、前記車両が迷走した際に前記車両の運転者が特徴的な行動を検出することを特徴とする目的地案内装置。 - 請求項1〜請求項6の何れかに記載の目的地案内装置において、
前記迷走判定手段は、前記車両が所定の範囲内に入ってから前記車両が迷走していることを判定するまでの時間を設定可能に構成されていることを特徴とする目的地案内装置。 - 請求項1〜請求項7の何れかに記載の目的地案内装置において、
前記目的地案内手段は、前記車両が迷走していると判定されてから、再度その目的地までの経路を前記提示手段に提示するまでの時間を設定可能に構成されていることを特徴とする目的地案内装置。 - 請求項8に記載の目的地案内装置において、
前記目的地案内手段は、前記迷走判定手段に備えられた前記現在位置検出手段によって、前記車両の現在位置が前記所定の範囲から外れた場合には、前記目的地までの経路を前記提示手段に提示しないことを特徴とする目的地案内装置。 - 請求項1〜請求項9の何れかに記載の目的地案内装置において、
運転者が目的地案内を終了するか否かの指令を入力するための入力手段を備え、
前記目的地案内手段は、前記迷走判定手段で前記車両が迷走していると判定されたときに、前記車両の運転者に対して、目的地案内を終了する旨を前記提示手段に提示させ、その提示の後前記入力手段を介して目的地案内を終了する旨の指令の入力があった場合には、目的地案内を終了し、目的地案内を終了しない旨の指令の入力があった場合には、前記目的地に到着したことを判定しないことを特徴とする目的地案内装置。 - 請求項1〜請求項10の何れかに記載の目的地案内装置において、
前記目的地設定手段によって、1つの目的地しか設定されていない場合、前記目的地案内手段は、前記迷走判定手段で前記車両が迷走していると判定されたときであっても、前記目的地に到着したことを判定することを特徴とする目的地案内装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006348281A JP4984878B2 (ja) | 2006-12-25 | 2006-12-25 | 目的地案内装置 |
| US12/003,082 US8024116B2 (en) | 2006-12-25 | 2007-12-20 | Vehicle stray determination apparatus and destination guide apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006348281A JP4984878B2 (ja) | 2006-12-25 | 2006-12-25 | 目的地案内装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008157813A JP2008157813A (ja) | 2008-07-10 |
| JP4984878B2 true JP4984878B2 (ja) | 2012-07-25 |
Family
ID=39544111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006348281A Expired - Fee Related JP4984878B2 (ja) | 2006-12-25 | 2006-12-25 | 目的地案内装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8024116B2 (ja) |
| JP (1) | JP4984878B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5120277B2 (ja) * | 2008-03-31 | 2013-01-16 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置およびプログラム |
| JP4725637B2 (ja) * | 2008-11-19 | 2011-07-13 | 株式会社デンソー | ナビゲーション装置 |
| JP5123863B2 (ja) * | 2009-01-06 | 2013-01-23 | 株式会社日立製作所 | カーナビゲーション装置およびカーナビゲーション方法 |
| JP5370052B2 (ja) * | 2009-10-02 | 2013-12-18 | 株式会社デンソー | データ記録装置及びデータ記録方法 |
| WO2013124904A1 (ja) * | 2012-02-24 | 2013-08-29 | 三菱電機株式会社 | 車載通信装置およびナビゲーション装置 |
| US9069604B2 (en) * | 2013-03-04 | 2015-06-30 | Yagi Corp. | Activity interruption management |
| DE102014217654A1 (de) | 2014-09-04 | 2016-03-10 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Verarbeiten von Messdaten eines Fahrzeuges zur Bestimmungdes Beginns eines Parksuchverkehrs und Computerprogrammprodukt |
| US11493348B2 (en) | 2017-06-23 | 2022-11-08 | Direct Current Capital LLC | Methods for executing autonomous rideshare requests |
| US11106927B2 (en) * | 2017-12-27 | 2021-08-31 | Direct Current Capital LLC | Method for monitoring an interior state of an autonomous vehicle |
| US10853629B2 (en) | 2018-02-20 | 2020-12-01 | Direct Current Capital LLC | Method for identifying a user entering an autonomous vehicle |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2774410B2 (ja) * | 1992-03-27 | 1998-07-09 | 日産車体株式会社 | ナビゲーションシステム付車両 |
| JP2914111B2 (ja) | 1993-08-20 | 1999-06-28 | 住友電気工業株式会社 | 経路案内装置 |
| KR100235239B1 (ko) * | 1995-09-29 | 1999-12-15 | 모리 하루오 | 가형정보의 출력장치, 가형정보의 출력방법, 지도표시장치, 지도표시방법, 네비게이션장치 및 네비게이션방법 |
| JP2907079B2 (ja) * | 1995-10-16 | 1999-06-21 | ソニー株式会社 | ナビゲーション装置,ナビゲート方法及び自動車 |
| JP3357778B2 (ja) * | 1996-01-18 | 2002-12-16 | アルパイン株式会社 | 車載用ナビゲーション装置の経路誘導方法 |
| US5951621A (en) * | 1997-10-30 | 1999-09-14 | Lear Automotive Dearborn, Inc. | Proximity indicator display |
| JP2005069733A (ja) * | 2003-08-20 | 2005-03-17 | Denso Corp | ナビゲーション装置、再探索プログラム、及び記憶媒体 |
| JP2005209091A (ja) | 2004-01-26 | 2005-08-04 | Honda Motor Co Ltd | 車両共同利用システム |
| JP4437816B2 (ja) * | 2004-03-26 | 2010-03-24 | パイオニア株式会社 | ナビゲーション装置、経路探索方法、経路探索プログラムおよびコンピュータ読み取り可能な記録媒体 |
| JP4696253B2 (ja) * | 2004-05-21 | 2011-06-08 | パイオニア株式会社 | 移動経路設定装置、移動経路報知装置、および移動経路報知システム |
| JP4515857B2 (ja) * | 2004-08-17 | 2010-08-04 | クラリオン株式会社 | ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム |
| JP2006064672A (ja) | 2004-08-30 | 2006-03-09 | Denso Corp | ナビゲーション装置 |
| KR100663027B1 (ko) * | 2004-12-27 | 2006-12-28 | 엘지전자 주식회사 | 네비게이션 시스템에서 이동체의 경로이탈 판단방법 |
| JP4534838B2 (ja) * | 2005-03-30 | 2010-09-01 | 株式会社デンソー | ナビゲーション装置およびナビゲーション装置用プログラム |
| US7301464B2 (en) * | 2005-05-24 | 2007-11-27 | Electronic Data Systems Corporation | Process and method for safer vehicle navigation through facial gesture recognition and operator condition monitoring |
-
2006
- 2006-12-25 JP JP2006348281A patent/JP4984878B2/ja not_active Expired - Fee Related
-
2007
- 2007-12-20 US US12/003,082 patent/US8024116B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20080154497A1 (en) | 2008-06-26 |
| JP2008157813A (ja) | 2008-07-10 |
| US8024116B2 (en) | 2011-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4984878B2 (ja) | 目的地案内装置 | |
| US10996671B2 (en) | Driving assist apparatus | |
| US9188445B2 (en) | System and method for storing and recalling location data | |
| JP6036371B2 (ja) | 車両用運転支援システム及び運転支援方法 | |
| US20100262327A1 (en) | Driving support systems, methods, and programs | |
| JP2008026118A (ja) | 運転支援装置及び車両用ナビゲーション装置 | |
| JP4899351B2 (ja) | 走行状況判定装置及び車載ナビゲーション装置 | |
| JP4561802B2 (ja) | 地図表示装置及びプログラム | |
| US7124025B2 (en) | Vehicular navigation device | |
| JP2022119106A (ja) | 車両および運転支援装置 | |
| JP2009008646A (ja) | 車載ナビゲーション装置 | |
| JP2005292052A (ja) | 車載ナビゲーション装置 | |
| JP2002372433A (ja) | カーナビゲーション装置 | |
| JP2007024599A (ja) | 車載ナビゲーション装置 | |
| JP4985505B2 (ja) | 音出力装置及びプログラム | |
| JP2008090664A (ja) | 運転支援装置及びプログラム | |
| JP4775107B2 (ja) | 車両用経路案内装置 | |
| JP4254473B2 (ja) | カーナビゲーション装置 | |
| JP5456376B2 (ja) | 車載用ナビゲーション装置 | |
| JP2003166840A (ja) | カーナビゲーション装置 | |
| JP2002202146A (ja) | ナビゲーション装置 | |
| JP2007071666A (ja) | 車載ナビゲーション装置 | |
| JP2006010551A (ja) | ナビゲーション装置と関心地点情報提示方法 | |
| JP2006023149A (ja) | ナビゲーション装置、および目的地候補リスト表示方法 | |
| JP2012118025A (ja) | 施設退出案内システム及び施設退出案内プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110705 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110706 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110905 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120416 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4984878 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |