JP4827525B2 - カプセル型医療装置誘導システム - Google Patents
カプセル型医療装置誘導システム Download PDFInfo
- Publication number
- JP4827525B2 JP4827525B2 JP2005375538A JP2005375538A JP4827525B2 JP 4827525 B2 JP4827525 B2 JP 4827525B2 JP 2005375538 A JP2005375538 A JP 2005375538A JP 2005375538 A JP2005375538 A JP 2005375538A JP 4827525 B2 JP4827525 B2 JP 4827525B2
- Authority
- JP
- Japan
- Prior art keywords
- medical device
- magnetic field
- antenna
- capsule medical
- receiving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00011—Operational features of endoscopes characterised by signal transmission
- A61B1/00016—Operational features of endoscopes characterised by signal transmission using wireless means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00156—Holding or positioning arrangements using self propulsion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0031—Implanted circuitry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/07—Endoradiosondes
- A61B5/073—Intestinal transmitters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
- A61B2034/731—Arrangement of the coils or magnets
- A61B2034/732—Arrangement of the coils or magnets arranged around the patient, e.g. in a gantry
Description
このカプセル型医療装置としては、特許文献1には、カプセル内視鏡を磁気的に誘導することができる医療装置誘導システムが提案されている。この医療装置誘導システムは、外周面に螺旋状突起が設けられたカプセル内視鏡本体が、その長手(円筒軸)方向に直交する方向に着磁された磁石を内蔵し、操作指示に基づく磁界制御装置及び回転磁界発生装置により発生された磁界によりカプセル本体を回転させつつ、進行方向を円滑に変化させて移動し、所望する箇所の撮像を行っている。撮像された画像データは、カプセル内視鏡内の無線回路(アンテナ)から、医療装置本体側の無線回路(アンテナ)に無線により送信されている。
図1に示す本発明の一実施形態に係るカプセル型医療装置誘導システムについて説明する。図2は、本実施形態におけるカプセル内視鏡の断面構成を示している。
このカプセル型医療装置誘導システムは、カプセル型医療装置21と、カプセル内視鏡を誘導するための磁界を発生する磁気誘導装置1とに大別される。
まず、撮像部として、固定焦点レンズを有する撮影光学系26と、撮像側基板24a上に実装されるCMOS又はCCD等からなる撮像素子25と、撮影光学系26の近傍に設けられた調光可能なLEDから成る照明部39と、撮像素子25に対して裏面側の撮像側基板24aに実装される撮像素子25からの画像信号に所定の画像処理を施す画像処理回路27とを備えている。また、撮像側基板24a及び電源側基板24b及び前方の電池用基板43aは、接着固定部29として接着剤で封止して一体的に固定される。
前述したように、同時に複数の誘導コイルにより発生した磁気勾配を有する磁界が重畳されて1つの磁界を形成し、カプセル内視鏡21を移動させている。このカプセル内視鏡21を誘導するための磁界強度または磁気勾配は、カプセル内視鏡21が送信する通信データの電波(電磁波)と比べると、非常に強力であり、受信装置9に設けられた受信素子(例えば、プリアンプ)の入力可能範囲を超える信号として、この誘導電流が印加され、それらの受信素子に損傷を与える場合がある。また、複数の誘導コイルに発生される磁力線の磁気勾配の重なり方により、磁界(磁力線)が極めて急峻に変化していた場合には、カプセル内視鏡21に急峻な動きが起こり、カプセル内視鏡21の送信アンテナ37を形成するコイルに大きな誘導起電力を発生させて送信回路に対して大きな過負荷を与えることとなる。また、構成部品の電気的耐性を越えない場合でも無線通信自体ができなくなる可能性がある。
受信アンテナAX、AY、AZは、通電された誘導コイルY2が発生した磁力線が図3に示すように通過している。これらのうち、受信アンテナAYは、磁力線が受信アンテナの向き(受信アンテナの指向性の向き)と平行になっている。この受信状態においては、受信アンテナAYには、誘導コイルY2が発生した磁界により、誘導起電力による過負荷電流が流れる可能性がある。他方の受信アンテナAX、AZについては、図3に示すように磁力線が、各受信アンテナの指向性の向きに対して、共に90度近い角度で進入しているために、誘導コイルY2で生成された磁界による誘導起電力による過負荷電流は6ほとんど流れることはなく、カプセル内視鏡21からの通信データを正常に取得することができる。以上のことから、受信アンテナAYが最も強い誘導起電力による過負荷電流が流れて、本来取得しなくてはならないカプセル内視鏡21からの通信データが取得できない可能性がある。
これらのうち、受信アンテナAY2は、3つのうちの中央に配置されて誘導コイルY2の中央と正対する。この位置関係により、受信アンテナAY2における受信感度が最も高くなる指向性と、誘導コイルY2で生成された磁界の磁力線の方向が一致する。
従って、受信アンテナAY2は、誘導コイルY2の誘導起電力による過負荷電流が多く流れてしまい、カプセル内視鏡21との通信に障害が生じる可能性がある。これに対して、受信アンテナAY1、AY3は、共に斜め方向から磁力線が入射するため、誘導起電力による過負荷電流が低く抑えられ、カプセル内視鏡21からの通信データの受信を正常に行うことができる。
1)誘導制御装置3により磁界を計算等で求めた後、各誘導コイル用電源2(又は誘導コイル)で発生する磁界の強度を決定する。2)各受信アンテナ7の位置に形成される磁界の強度(磁界の変化率)とその方向を求める。3)各受信アンテナ7に流れる誘導電流に比例する係数を求める。又は、各受信アンテナの指向性の向きと磁界のなす角を求める。4)誘導電流(誘導起電力による過負荷電流)に比例する係数が最も小さい受信アンテナをアンテナセレクタ8で選択する。又は、指向性の向きと磁界のなす角が最も90度に近い受信アンテナをアンテナセレクタ8で選択する。
以上のように、カプセル内視鏡の位置誘導や姿勢制御を行うための誘導コイルが形成する誘導起電力による過負荷電流が最も印加されていない受信アンテナを選択する。
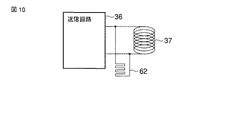
図5は、第1の例として、カプセル内視鏡21の送信アンテナ37を形成するコイルの両端間にツェナーダイオード列51を挿入した例である。このツェナーダイオード列51は、交流信号に対応できるように2つのツェナーダイオードのアノードどうしが接続され、各カソードがコイル37の両端にそれぞれ接続されている。
この構成によれば、規定以上の誘導起電力による過負荷電流が発生した場合には、これらのツェナーダイオードを通して電流が流れるため送信回路36側に流れ込む電流を制限することができ、回路に与える損傷を防止することができる。
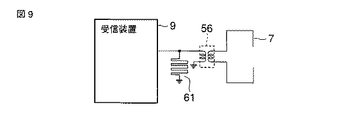
図7は、第3の例として、受信装置6の受信アンテナ7(AY1、AY2、AY3)の両端間にツェナーダイオード列54を挿入した例である。受信アンテナ7は、トランス53を介して受信装置6の入力端子に接続されている。ツェナーダイオード列54は、2つのツェナーダイオードのアノードどうしが接続され、各カソードが受信アンテナ7の両端にそれぞれ接続されている。
このような構成により、規定以上の誘導起電力が発生した場合には、ツェナーダイオードを通して電流が流れるため受信装置9に流れ込む電流を制限し、受信装置9に与える損傷を防止することができる。
Claims (15)
- 体内情報を取得する体内情報取得部と、取得した体内情報を出力信号として外部に送信する通信部と、磁石とを有するカプセル型医療装置と、
それぞれの指向性における受信感度が最も高い方向が互いに異なり、前記出力信号を受信する複数の受信アンテナと、
前記複数の受信アンテナに接続され、その信号の経路を切り替えるセレクタと、
前記セレクタに接続され、切り替えた前記受信アンテナからの信号を受信する受信装置と前記磁石に作用させて前記カプセル型医療装置を目的の方向に移動するための誘導用磁界を発生する磁界発生部と、
前記磁界発生部の生成信号を制御する制御部と、
を具備し、
前記制御部が、誘導用磁界により過負荷電流が流れる受信アンテナを特定し、該受信アンテナを受信装置から切り離すようにセレクタを制御することを特徴とするカプセル型医療装置誘導システム。 - 前記制御部が、前記磁界発生部が発生する前記誘導用磁界の方向と、前記受信アンテナの指向性の方向の成す角度を算出し、その結果に基づき最も非平行と判定された受信アンテナを選択して前記受信回路に接続する
ことを特徴とする請求項1に記載のカプセル型医療装置誘導システム。 - 前記受信アンテナの両端子間、もしくは電気的に等価な端子間に、磁気リードスイッチが接続されている請求項1に記載のカプセル型医療装置誘導システム。
- 前記受信アンテナの両端子間、もしくは電気的に等価な端子間に、ツェナーダイオードアレイが接続されている請求項1に記載のカプセル型医療装置誘導システム。
- 前記受信アンテナの両端子間、もしくは電気的に等価な端子間に、伝送線路から成るショートスタブが接続されている請求項1に記載のカプセル型医療装置誘導システム。
- 前記通信部は送信アンテナを含み、該送信アンテナの両端子間、もしくは電気的に等価な端子間に、磁気リードスイッチが接続されている請求項1に記載のカプセル型医療装置誘導システム。
- 前記通信部は送信アンテナを含み、該送信アンテナの両端子間、もしくは電気的に等価な端子間に、ツェナーダイオードアレイが接続されている請求項1に記載のカプセル型医療装置誘導システム。
- 前記通信部は送信アンテナを含み、該送信アンテナの両端子間、もしくは電気的に等価な端子間に、伝送線路から成るショートスタブが接続されている請求項1に記載のカプセル型医療装置誘導システム。
- 前記通信部に磁性材料から成るシールド部を有する請求項1に記載のカプセル型医療装置誘導システム。
- 体内情報を取得する体内情報取得部と、取得した体内情報を出力信号として外部に送信する送信アンテナを含む通信部と、磁石とを有するカプセル型医療装置と、
前記出力信号を受信する複数の受信アンテナと、
前記磁石に作用させて前記カプセル型医療装置を目的の方向に移動するための誘導用磁界を発生する磁界発生部と、
前記磁界発生部の生成信号を制御する制御部と、
を具備し、
前記受信アンテナと前記送信アンテナのうち少なくとも一方においてその配置位置における誘導用磁界の強度に基づき該アンテナの電気的特性を変化させるアンテナ制御素子を有することを特徴とするカプセル型医療装置誘導システム。 - 前記アンテナ制御素子が磁気リードスイッチである、請求項10に記載のカプセル型医療装置誘導システム。
- 前記アンテナ制御素子がツェナーダイオードアレイである、請求項10に記載のカプセル型医療装置誘導システム。
- 前記アンテナ制御素子が伝送線路から成るショートスタブである、請求項10に記載のカプセル型医療装置誘導システム。
- カプセル型医療装置内に設けられた磁石に作用させる磁界により、体腔内で目的の方向に移動させつつ、前記体腔内の体内情報を送信するカプセル型医療装置を誘導するシステムの制御方法であって、
異なる方向を向く複数の受信アンテナが、送信された前記体内情報の受信感度に応じて切り替えられて前記体内情報が受信され、さらに前記磁界により過負荷電流が流れる前記受信アンテナを受信経路から切り離すことを特徴とするカプセル型医療装置誘導システムの制御方法。 - 前記カプセル型医療装置を誘導するシステムの制御方法であって、
発生した前記誘導用磁界の最も高い受信感度が得られる方向と、前記受信アンテナの指向性の方向の成す角度を算出し、最も非平行と判定された受信アンテナを選択して受信することを特徴とする請求項14に記載のカプセル型医療装置誘導システムの制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005375538A JP4827525B2 (ja) | 2005-12-27 | 2005-12-27 | カプセル型医療装置誘導システム |
| EP06843529.6A EP1972254B1 (en) | 2005-12-27 | 2006-12-27 | Encapsulated medical device guidance system |
| CN2006800496284A CN101351142B (zh) | 2005-12-27 | 2006-12-27 | 胶囊型医疗装置引导系统及其控制方法 |
| PCT/JP2006/326147 WO2007074887A1 (ja) | 2005-12-27 | 2006-12-27 | カプセル型医療装置誘導システム及びその制御方法 |
| US12/146,725 US8337396B2 (en) | 2005-12-27 | 2008-06-26 | Encapsulated medical device guidance system, and a method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005375538A JP4827525B2 (ja) | 2005-12-27 | 2005-12-27 | カプセル型医療装置誘導システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007175188A JP2007175188A (ja) | 2007-07-12 |
| JP2007175188A5 JP2007175188A5 (ja) | 2009-02-12 |
| JP4827525B2 true JP4827525B2 (ja) | 2011-11-30 |
Family
ID=38218109
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005375538A Expired - Fee Related JP4827525B2 (ja) | 2005-12-27 | 2005-12-27 | カプセル型医療装置誘導システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8337396B2 (ja) |
| EP (1) | EP1972254B1 (ja) |
| JP (1) | JP4827525B2 (ja) |
| CN (1) | CN101351142B (ja) |
| WO (1) | WO2007074887A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5340566B2 (ja) * | 2007-07-24 | 2013-11-13 | オリンパスメディカルシステムズ株式会社 | 受信装置 |
| EP2567653B1 (en) * | 2008-06-19 | 2014-09-03 | Olympus Medical Systems Corp. | Magnetical guiding system |
| DE102008049198B4 (de) * | 2008-09-26 | 2017-03-02 | Siemens Healthcare Gmbh | Spulensystem, medizinisches Gerät und Verfahren zur berührungslosen magnetischen Navigation eines magnetischen Körpers in einem Arbeitsraum |
| JP2010110432A (ja) * | 2008-11-05 | 2010-05-20 | Olympus Corp | 無線型被検体内情報取得装置 |
| EP2407081A4 (en) * | 2009-03-10 | 2013-03-13 | Olympus Medical Systems Corp | POSITION DETECTING SYSTEM AND POSITION DETECTING METHOD |
| DE102009060514A1 (de) * | 2009-12-23 | 2011-06-30 | Siemens Aktiengesellschaft, 80333 | Spulensystem und Verfahren zur berührungslosen magnetischen Navigation eines magnetischen Körpers in einem Arbeitsraum |
| DE102009060608A1 (de) * | 2009-12-23 | 2011-06-30 | Siemens Aktiengesellschaft, 80333 | Spulensystem und Verfahren zur berührungslosen magnetischen Navigation eines magnetischen Körpers in einem Arbeitsraum |
| WO2012124228A1 (ja) | 2011-03-15 | 2012-09-20 | オリンパスメディカルシステムズ株式会社 | 医療装置 |
| WO2012127469A1 (en) * | 2011-03-22 | 2012-09-27 | Given Imaging Ltd. | Systems and methods for synchronizing between an in-vivo device and a localization system |
| CN103784144B (zh) * | 2012-10-30 | 2015-10-21 | 上海理工大学 | 多磁场源的正弦交变磁场发生装置 |
| CN103340595B (zh) * | 2013-07-03 | 2015-08-26 | 安翰光电技术(武汉)有限公司 | 一种无线胶囊内窥镜及其电源控制方法 |
| JP2015123334A (ja) * | 2013-12-27 | 2015-07-06 | オリンパス株式会社 | 無線送信器及び生体情報取得システム |
| JP6132984B2 (ja) * | 2014-12-12 | 2017-05-24 | オリンパス株式会社 | カプセル内視鏡システム及びその撮像方法 |
| CN107405052B (zh) * | 2016-03-04 | 2019-03-26 | 奥林巴斯株式会社 | 引导装置以及胶囊型医疗装置引导系统 |
| CA3033342C (en) * | 2016-08-10 | 2021-07-27 | Iucf-Hyu(Industry-University Cooperation Foundation Hanyang University) | Magnetic field control system |
| US10404093B2 (en) * | 2017-04-26 | 2019-09-03 | Biosense Webster (Israel) Ltd. | Using location transmission signals for charging a wireless medical tool of an electromagnetic navigation system |
| CN112294240A (zh) * | 2019-07-25 | 2021-02-02 | 北京微纳灵动科技有限公司 | 胶囊机器人的磁控方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5681260A (en) * | 1989-09-22 | 1997-10-28 | Olympus Optical Co., Ltd. | Guiding apparatus for guiding an insertable body within an inspected object |
| DE19745310C2 (de) * | 1997-10-14 | 1999-10-21 | Temic Semiconductor Gmbh | Modulationsverfahren zur Datenübertragung von einem Transponder zu einem Schreib-Lese-Gerät sowie eine Anordnung zur Durchführung des Modulationsverfahrens |
| JP3974769B2 (ja) * | 2001-11-06 | 2007-09-12 | オリンパス株式会社 | カプセル型医療装置 |
| JP2004167163A (ja) * | 2002-11-22 | 2004-06-17 | Olympus Corp | カプセル型医療システム |
| JP4091004B2 (ja) | 2003-02-04 | 2008-05-28 | オリンパス株式会社 | 医療装置誘導システム |
| JP4153845B2 (ja) * | 2003-08-11 | 2008-09-24 | オリンパス株式会社 | 医療装置誘導システム |
| DE10343494B4 (de) * | 2003-09-19 | 2006-06-14 | Siemens Ag | Magnetisch navigierbare Einrichtung für den Einsatz auf dem Gebiet der medizinischen Endoskopie |
| JP4414725B2 (ja) * | 2003-10-28 | 2010-02-10 | オリンパス株式会社 | カプセル型医療装置 |
| US7751866B2 (en) * | 2004-03-08 | 2010-07-06 | Olympus Corporation | Detecting system of position and posture of capsule medical device |
| JP4009617B2 (ja) * | 2004-05-26 | 2007-11-21 | オリンパス株式会社 | 位置関係検出装置および位置関係検出システム |
| JP2006075533A (ja) * | 2004-09-13 | 2006-03-23 | Olympus Corp | 被検体内導入システム、受信装置および被検体内導入装置 |
| US20070244388A1 (en) * | 2004-12-17 | 2007-10-18 | Ryoji Sato | Position Detection System, Guidance System, Position Detection Method, Medical Device, and Medical Magnetic-Induction and Position-Detection System |
| WO2006077643A1 (ja) * | 2005-01-21 | 2006-07-27 | Olympus Corporation | 無線型被検体内情報取得システム |
| CN1647749A (zh) * | 2005-02-03 | 2005-08-03 | 重庆金山科技(集团)有限公司 | 双工多通道智能胶囊无线内窥镜系统 |
| CN1709196A (zh) * | 2005-02-08 | 2005-12-21 | 重庆金山科技(集团)有限公司 | 双工多通道智能胶囊消化道内窥镜的控制方法 |
-
2005
- 2005-12-27 JP JP2005375538A patent/JP4827525B2/ja not_active Expired - Fee Related
-
2006
- 2006-12-27 EP EP06843529.6A patent/EP1972254B1/en not_active Expired - Fee Related
- 2006-12-27 CN CN2006800496284A patent/CN101351142B/zh active Active
- 2006-12-27 WO PCT/JP2006/326147 patent/WO2007074887A1/ja active Application Filing
-
2008
- 2008-06-26 US US12/146,725 patent/US8337396B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101351142B (zh) | 2010-08-18 |
| EP1972254A4 (en) | 2009-09-09 |
| CN101351142A (zh) | 2009-01-21 |
| US8337396B2 (en) | 2012-12-25 |
| WO2007074887A1 (ja) | 2007-07-05 |
| JP2007175188A (ja) | 2007-07-12 |
| US20080300459A1 (en) | 2008-12-04 |
| EP1972254B1 (en) | 2014-03-19 |
| EP1972254A1 (en) | 2008-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4827525B2 (ja) | カプセル型医療装置誘導システム | |
| JP2007175188A5 (ja) | ||
| JP4891924B2 (ja) | カプセル型医療装置誘導システム及びその制御方法 | |
| KR100889160B1 (ko) | 자기 안내 의료 장치 | |
| US20130331649A1 (en) | Magnetically maneuverable in-vivo device | |
| WO2016157583A1 (ja) | カプセル型内視鏡システムおよび磁界発生装置 | |
| WO2016151915A1 (ja) | 位置検出システム及び誘導システム | |
| JPWO2016067802A1 (ja) | カプセル型内視鏡誘導システム、誘導装置、及び誘導装置の作動方法 | |
| JP5499658B2 (ja) | 撮像装置 | |
| JP5423353B2 (ja) | 撮像装置 | |
| JP5544842B2 (ja) | 撮像装置 | |
| JP2010170099A (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081224 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110830 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110913 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140922 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140922 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |