JP4789695B2 - Camera, composite image photographing method and program - Google Patents
Camera, composite image photographing method and program Download PDFInfo
- Publication number
- JP4789695B2 JP4789695B2 JP2006135314A JP2006135314A JP4789695B2 JP 4789695 B2 JP4789695 B2 JP 4789695B2 JP 2006135314 A JP2006135314 A JP 2006135314A JP 2006135314 A JP2006135314 A JP 2006135314A JP 4789695 B2 JP4789695 B2 JP 4789695B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- images
- obstacle
- subject
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Stereoscopic And Panoramic Photography (AREA)
- Image Processing (AREA)
- Studio Circuits (AREA)
- Editing Of Facsimile Originals (AREA)
- Studio Devices (AREA)
Description
この発明は、デジタルカメラの改良に関し、より詳しくは、画像合成機能を備えるカメラに関する。 The present invention relates to an improvement of a digital camera, and more particularly to a camera having an image composition function.
撮影時に、セルフタイマー撮影などで典型的に現れる状況で、カメラと被写体の間に邪魔な侵入物があって、せっかくのシャッターチャンスを逃してしまったり、良好な画像が得られないという課題がある。この対策の1つとして、セルフタイマ動作時には繰り返し測距を行い、距離の変化から侵入物の存在を検出する技術が提案されている。(特許文献1)
また、別な対策としては、デジタルカメラの分野では、画像の検出処理を用いて、侵入物のない画像を得るような技術も提案されている。例えば特許文献2には、撮影に先立ち複数枚の部分画像から移動物体の存在の有無を検出し、移動物体の写っていない部分画像を合成して、画像を得る方法が開示されている。
When shooting, a situation that typically appears in self-timer shooting, etc., there is a problem that there is an intrusive intruder between the camera and the subject, missing a precious photo opportunity, or a good image cannot be obtained . As one of countermeasures, a technique has been proposed in which distance measurement is repeatedly performed during the self-timer operation and the presence of an intruder is detected from a change in distance. (Patent Document 1)
As another countermeasure, in the field of digital cameras, a technique for obtaining an image without an intruder by using an image detection process has been proposed. For example,
一方、最近のデジタルカメラでは、メモリ容量の増加や動画圧縮技術の進歩さらには撮像素子の高速化によって、静止画撮影だけでなく動画撮影や高速連写にも対応ができるようになってきている。高画素、たとえば500万画素以上の撮像素子では、従来読み出しスピードが数十ミリ秒かかっていたが、最近はフルの画素を60fpsといった高フレームレートで読出しのできるものも、提案されている。 On the other hand, recent digital cameras have become able to support not only still image shooting but also video shooting and high-speed continuous shooting due to the increase in memory capacity, the progress of video compression technology, and the speedup of the image sensor. . In an image sensor with high pixels, for example, 5 million pixels or more, the conventional readout speed has been several tens of milliseconds, but recently, a device capable of reading full pixels at a high frame rate of 60 fps has been proposed.
上記特許文献2のような複数画像を利用する技術では、複数画像の撮影時間差が問題であったが、上記のような高速の連写の技術を付加すれば、タイムラグを心配することなく、邪魔な物体は写さずに肝心の被写体のみを撮影することも可能になる。
上記特許文献1に開示された技術は、邪魔な物体が画面に入らないようなタイミングで撮影を行う方法である。また特許文献2に開示された技術も、邪魔な物体が写っていない画像を合成するという方法である。いづれも、邪魔な物体が入っている状態では撮影を行わないようにする方法である。
The technique disclosed in
ところが、海外旅行などでは、ツアーの移動に拘束されて単に車窓の風景を楽しむだけという状況が多い。こうした場合、車の場合は対向車や標識に、電車の場合は電柱などが邪魔をして、きれいな風景をとることができないことが多い。このような場面で、従来の技術を利用すると、邪魔物は写らないようになるが、自分の写したい撮影タイミングやアングルからずれてしまうことになる。 However, when traveling overseas, there are many situations where the tour is restricted by the movement of the tour and the scenery of the car window is simply enjoyed. In such a case, it is often impossible to take a beautiful scenery because an oncoming vehicle or sign in the case of a car and a telephone pole in the case of a train get in the way. In such a situation, if the conventional technique is used, the obstruction will not be captured, but it will deviate from the shooting timing and angle that you want to capture.
つまり、従来の技術では、邪魔ものが写らないタイミングまで撮影を待たなければならないので、自分の写したい撮影タイミングやアングルからずれてしまうことになる。つまり、上記の技術だけでは、邪魔物を削除した有効な画像を得ることができない。そこで、邪魔な障害物が画角内に入った状態でも、この障害物が画面に入らないような画像が簡単に得られるカメラが望まれる。 In other words, in the conventional technique, it is necessary to wait until the time when the obstacles are not photographed. That is, it is not possible to obtain an effective image from which the obstacles are deleted only by the above technique. Therefore, there is a demand for a camera that can easily obtain an image in which an obstacle does not enter the screen even when a disturbing obstacle enters the angle of view.
この発明では、上記課題に鑑み、邪魔な障害物が入らない画像を撮影できるカメラ、そ
の合成画像撮影方法及びプログラムを提供することを目的とする。
In view of the above problems, an object of the present invention is to provide a camera that can capture an image that does not contain an obstructive obstacle, and a method and program for capturing the image.
上記目的を達成するために、第1の発明によるカメラは、隣接した位置を連続して撮影した複数の画像について、当該隣接する画像を比較して、両画像の画面で共通する被写体でありながら、一方の画面だけでその被写体の障害となる障害物が撮影されている画像を不適切な被写体が撮影された画像として、当該不適切な被写体が撮影された画像を選択して採用不可とし、適切な被写体が撮影された画像を選択して採用画像とする画像選択部と、
上記複数の採用画像を合成して一枚の静止画像を得る合成部とを備えるものである。
In order to achieve the above object, the camera according to the first aspect of the present invention compares a plurality of images obtained by continuously capturing adjacent positions and compares the adjacent images with each other and is a subject common to the screens of both images. , An image in which an obstacle that is an obstacle to the subject is photographed on only one screen is regarded as an image in which the inappropriate subject is photographed, and an image in which the inappropriate subject is photographed is selected and cannot be adopted. An image selection unit that selects an image in which an appropriate subject is photographed and sets it as an adopted image;
And a combining unit that combines the plurality of adopted images to obtain one still image .
また、第2の発明によるカメラは、連写撮影を制御する撮影制御部と、撮影画像の画面内に被写体を遮る障害物が写っていないかを、上記連写撮影された複数の画像を比較して判定する判定部と、連写撮影された画像の画面内に被写体を遮る障害物が写っていると判定されたときは、上記撮影画像の前後に連写された画像であって、上記障害物の写っていない前後の画像から、障害物の写っている画像と同等な被写体アングルでかつ障害物の写っていない画像を合成する画像合成部とを備えるものである。 The camera according to the second aspect of the present invention compares the plurality of images that have been continuously shot with the shooting control unit that controls the continuous shooting and whether or not an obstacle that blocks the subject appears in the screen of the shot image. A determination unit that determines whether an obstacle that obstructs the subject is captured in the screen of the continuously shot image, the image continuously shot before and after the shot image, And an image composition unit that synthesizes an image having a subject angle equivalent to that of an image of an obstacle and an image of no obstruction from images before and after the obstacle is not photographed.
また、第3の発明による画像合成撮影方法は、連写撮影して得られた画像を合成する合成画像撮影方法において、撮影画像の画面内に被写体を遮る障害物が写っていないかを上記連写撮影された複数の画像を比較して判定し、連写撮影された画像の画面内に被写体を遮る障害物が写っていると判定されたときは、上記撮影画像の前後に連写撮影された画像であって、上記障害物の写っていない前後の画像から、障害物の写っている画像と同等な被写体アングルでかつ障害物の写っていない画像を合成するものである。 The third image combined image capturing process according to the invention is, in the synthesized image capturing method for synthesizing the images obtained by continuous shooting, the screen aforementioned connecting or obstructions the subject is not reflected in the captured image Judgment is made by comparing multiple shot images, and if it is determined that an obstacle that blocks the subject appears in the screen of the continuously shot images, continuous shooting is taken before and after the above shot images. An image having a subject angle equivalent to that of an image showing an obstacle and not showing an obstacle is synthesized from images before and after the obstacle is not shown.
本発明によれば、邪魔な障害物が入らない画像を撮影できるカメラ、その合成画像撮影
方法及びプログラムを提供することができる。
ADVANTAGE OF THE INVENTION According to this invention, the camera which can image | photograph the image which does not enter an obstructive obstacle, its composite image imaging method, and a program can be provided.
以下本発明を実施するための最良の形態を図面を参照して説明する。本発明は、デジタルカメラの改良に関するものであり、複数枚の画像から一枚の美しく迫力のある大きな広い範囲を撮影した画像を得るための技術である。具体的には、電柱等の邪魔なものの存在を気にすることなく、雄大な風景のパノラマなどを車窓から撮影したりに利用できるカメラである。 The best mode for carrying out the present invention will be described below with reference to the drawings. The present invention relates to an improvement of a digital camera, and is a technique for obtaining an image obtained by photographing one beautiful and powerful large range from a plurality of images. Specifically, it is a camera that can be used to take a panoramic view of a magnificent landscape from the car window without worrying about the presence of obstacles such as utility poles.
(第1実施形態)
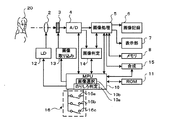
図1から図5を用いて、第1実施形態を説明する。図1は、本発明が適用されるカメラ1の全体ブロック図である。カメラ1にはレンズ部2、撮像素子3、A/D変換部4、画像処理部5、画像記録部6、メモリ8及び表示部7が設けられる。レンズ部2は、入射した被写体20の像を撮像素子3に結像する。撮像素子3は、CCDやCMOSからなり、結像された被写体像を電気信号に変換する。A/D変換部4は、撮像素子3から出力されるアナログの信号をデジタルの画像信号に変換する。
(First embodiment)
The first embodiment will be described with reference to FIGS. 1 to 5. FIG. 1 is an overall block diagram of a
画像処理部5は、画像データに各種処理を施す。画像処理部5は、圧縮部や伸張部等が設けられ、画像データに対して色補正、平滑化処理、コントラスト強調処理や信号圧縮、伸張などの各種処理を行う。また、画像処理部5には、コントラスト値を検出する回路が内蔵されている。画像記録部6は、画像処理された画像信号を記録媒体に記録する。メモリ8は、画像処理時等にワークエリアとして用いられるバッファーメモリである。表示部7は、例えばLCDから構成され、撮影時にモニタ画像を表示し、再生時には伸張処理された記録画像を表示する。
The
また、カメラ1には、レンズドライブ部(以降、LDと称す)12、画像取り込み部13が設けられる。LD部12は、アクチュエータや位置エンコーダを有し、レンズ部2の移動を制御する。LD部12は、画像処理部5から出力される画像のコントラスト値に基づいて合焦位置を検出し、レンズ部2を移動させる。画像取り込み部13は、撮像素子3に対して画像取り込みを指示する。
The
また、カメラ1には、MPU10、ROM11、操作部16が設けられる。MPU(マイクロコントローラ)10は、プログラムに従って撮影や再生等カメラ1の全体の制御を司る制御部である。ROM11は、不揮発性でかつ記録可能なメモリで例えばフラッシュROMからなり、カメラ処理を行う制御用のプログラムが格納される。操作部16は、撮影者の指示をMPU10に通知する。操作部16の代表例としてスイッチ16a、16b、16cが設けられる。スイッチ16aはレリーズスイッチである。MPU10は、撮影や表示などのユーザーの指示をスイッチ16a、16b、16cで検出して、これらのユニットを連結させて制御して、円滑かつスピーディで美しい画像の撮影を行う。また、MPU10は、コントラスト情報を取得してLD部12を制御してピント制御する。
The
また、カメラ1 には、画像判定部1 4 、のりしろ判定部1 0 a 、画像選択部1 0 b 、合成部1 5 が設けられる。画像判定部1 4 は、A / D 変換部4 でデジタル化された信号を利用して画像データを比較して、障害物の存在を判定する。画像判定部1 4 は、メモリ8内に記憶した信号と比較したりして、画像の類似度から、障害物を判定する。また画像判定部1 4 は、図2 のD 1 のように侵入してきた柱など障害物も、風景とは違ってぼけていたり暗かったりする特徴があるので、画像のコントラスト値や明るさなどの情報も利用して判定する。また、画像判定部1 4 が、連写画像間の一致部と不一致部の判定も行う。
In addition, the
のりしろ判定部10aと画像選択部10bは、MPU10により実行される処理機能の1つである。のりしろ判定部10aは、画像の左右からのりしろ部を抽出してのりしろデータを作成して、メモリ8に仮記録する。のりしろ判定部10aは、2つの画像の上記のりしろデータを比較して、2つの画像が接続されるかを判定する。
The
画像選択部10bは、パノラマ撮影時に、連写撮影された画像の中からパノラマ構成用の画像を選択する。画像選択部10bは、のりしろ判定部10aの判定結果に基づいてパノラマ構成用の画像の選択を行う。選択されたパノラマ構成用の画像はメモリ8に記憶される。
The
合成部15は、複数の画像を合成処理する。また、複数の画像から障害物を除いて合成処理する。また合成部15は、上記メモリ8に仮に記憶されたパノラマ構成用の画像を利用して、パノラマ画像を作成する。
The
また、MPU10は、撮影制御部として、このような画像判定部14の判定結果によって、侵入物のあった画像の処理やパノラマ合成の指示を画像処理部5や合成部15に対して行う。また、ユーザーのスイッチ(16a等)操作を判定し、画像の取り込みタイミングを決定したり、後段ブロックの働きを連携させて、デジタル画像取得を実行する。なお、画像判定部14、画像選択部10bや合成部15についての詳細は、後述する。
Further, the
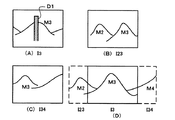
図2は、走行する車内にいる撮影者が車窓から山の風景を連写撮影する場面を示す図である。その風景は、図2のように、M1からM4の4つの山がある風景である。レンズ2と撮像素子3で示されるカメラ1は右方向に進行する。連写撮影時のカメラ位置を順番にP1、P2…P5で示す。P23は、P2とP3の間のカメラ位置を示し、P34は、P3とP4の間のカメラ位置を示す。また、図3は、図2の各位置に対応して撮影される画像を示す図である。
FIG. 2 is a diagram illustrating a scene in which a photographer in a traveling vehicle continuously captures a mountain landscape from a vehicle window. The landscape is a landscape with four mountains M1 to M4 as shown in FIG. The
そして、撮影者は、山M3を撮影するために、P3の位置でレリーズボタン16aを操作し、画像I3を撮影したとする。しかし、たまたまそのタイミングで手前に障害物(柱)D1があったとする。すると、画像I3は、図3(A)のように真ん中に障害物D1が入った画像になってしまい、美しいM3の山容が捉えられないことになる。 Then, it is assumed that the photographer operates the release button 16a at the position P3 to photograph the image M3 in order to photograph the mountain M3. However, it is assumed that there is an obstacle (pillar) D1 in front of it at that timing. Then, the image I3 becomes an image with the obstacle D1 in the middle as shown in FIG. 3A, and the beautiful mountain of M3 cannot be captured.
そこで、本実施形態では、P 3 の前後位置にあたるP2 3 とP3 4 の位置( 図2 ) で連写撮影された画像から、P 3 位置での画像I 3 を得るようにする。P2 3 とP3 4 の位置では、図3 ( B) のI2 3 、同図( C) のI3 4 の画像が撮影される。これら2つの画像を合成すれば、図3 ( D) のような柱のない画像でなおかつ、山M 3が画面中央にあるような画像I3 が得られる。画像I2 3 や画像I3 4 は、山M 3 の中央に障害物は存在しないが、山M 3が画面中央にはないので、撮影者の意図からずれた撮影になる。なお、I2 3 とI3 4 の画像は残しても残さなくてもよい。
Therefore, in the present embodiment, an image I 3 at the
図4は、上記で述べた合成画像を得るための撮影処理の手順を説明するフローチャートである。この撮影処理は、プログラムに従ったMPU10、画像判定部14及び合成部15により主に実行される。まず、P23の位置で画像I23を一旦メモリ8に記録する(ステップS11)。次に連写で、P3の位置で画像I3を記録する(ステップS12)。
FIG. 4 is a flowchart for explaining the procedure of the photographing process for obtaining the composite image described above. This photographing process is mainly executed by the
そして、画像I3 が適正な画像であるかを判断する( ステップS13) 。適正な画像とは、画面中に障害物のない画像である。これは画像判定部14 が、コントラストや明るさで適正かを判定する。適正であると判定すれば( ステップS13YES) 、画像I3 を、そのまま画像記録部6 が記録する( ステップS16) 。一方、適正でないと判定すれば(ステップS13NO) 、P34 の位置でも撮影を行い、画像I34 を記憶する( ステップS14 ) 。そして、合成部15がI23とI34を合成処理する( ステップS 15) 。図3(D) のような画像I3が合成される。画像記録部6が合成された画像I3を記録する( ステップS16 ) 。
Then, it is determined whether the image I3 is an appropriate image (step S13). A proper image is an image without an obstacle in the screen. In this case, the
図5は、このような撮影方法を説明するための図である。カメラ1の2つの撮影位置を、位置10aと10bで示す。この位置10aと10bの2箇所で、カメラ1によって撮影される画面上での、遠距離の被写体(山M3)と近距離の被写体(柱D1)の変化を示す。レンズ2の焦点距離をf、カメラ1から山M3までの距離をL1、カメラ1から柱d1までの距離をL2、位置10aと10bの間隔をSとする。
FIG. 5 is a diagram for explaining such a photographing method. Two shooting positions of the
位置10aでは、山M3と柱D1がレンズ2の光軸上で重なる関係にある。カメラ1の位置がSだけずれた位置10bでは、画面から柱D1がはずれる。つまり、撮像素子3の画面中央から端部までの距離をX2とし、柱が写らなくなる位置10bまでのSは、
S=X2×L2/f・・・式1
の関係となる。例えば、X2=10mm、L2=10m、f=10mmとすると、S=10m となる。一方、この位置10bでも、画面上では山M3の像は、ほとんど10aの撮像素子上の同じ場所にある。つまり、位置10aから位置10bに移動しても、画面中の山の位置の変化は少ない。そして、山M3までの距離が10kmとすると、式1より S=10mであるから、柱が見えなくなっても、あと9.99kmの長い区間山が見えていることがわかる(撮像素子に山の像が入射する)。
At the
S = X2 × L2 /
It becomes the relationship. For example, if X2 = 10 mm, L2 = 10 m, and f = 10 mm, S = 10 m. On the other hand, even at the
そこで、位置10aでの撮影に先立って図3(B)のような画像I23を撮影し、さらに上記のチャンスの間に図3(C)のような画像I34を撮影して、この2つの画像を合成すれば、M3の山を中心にした図3(D)のようなI3画像が得られる。時速100kmで走っていたとしても、直線であれば数分はチャンスがある。一方、柱を通り過ぎるのには、わずか0.3秒程度で済むので、秒3こま程度の速写によって前後1コマの撮影結果を採用すれば、図3(D)のI3と同様の画像をえることができる。
Therefore, prior to photographing at the
(第2実施形態)
図2、図6,図7および図8を用いて、第2実施形態について説明する。第2実施形態では、パノラマ撮影時に、途中に障害物があっても、障害物の写っていないパノラマ画像が得られる撮影制御についてを説明する。本発明が適用されるカメラのブロック図は、図1と同様であるので省略する。
(Second Embodiment)
The second embodiment will be described with reference to FIGS. 2, 6, 7 and 8. In the second embodiment, shooting control for obtaining a panoramic image without an obstacle even when an obstacle is present during panoramic shooting will be described. A block diagram of a camera to which the present invention is applied is the same as that shown in FIG.
図2でIAとして示したようなパノラマ画像は、P1、P2、P3、P4、P5の5箇所の位置で5枚の写真を撮って合成すれば作成できる。しかし、前述のようにP3の位置では障害物(柱)D1が邪魔になって、この時のI3画像は利用できない。そこで、P3のポイントでの撮影画像は、前述のようにP23、P34のポイントの撮影で代用することで、図2でIAとして示したようなパノラマ画像が、連写撮影から得ることができる。 A panoramic image as shown as IA in FIG. 2 can be created by taking five photographs at five positions P1, P2, P3, P4, and P5 and combining them. However, as described above, at the position P3, the obstacle (column) D1 becomes an obstacle, and the I3 image at this time cannot be used. Therefore, the panoramic image shown as IA in FIG. 2 can be obtained from the continuous shooting by replacing the shooting image at the point P3 with the shooting at the points P23 and P34 as described above.
図6は、パノラマ画像IAとパノラマ画像IAを構成する単体画像の関係を示す図である。T1からT7は撮影のタイミングを示し、G1からG7は対応して撮影される画像の番号を示す。本例のパノラマ画像IAは、T1からT7のタイミングで撮影されたG1からG7の7枚の連写画像の中の3枚の画像に基づいて作成される。この3枚の画像は、細かいタイミングでシフトされた位置で撮影された画像の中から、画像選択部10bによって選択される。そして、特段に障害物がなければ、T1とT4とT7の3つの画像から、パノラマ画像が構成されるものとする。
FIG. 6 is a diagram illustrating the relationship between the panoramic image IA and the single images constituting the panoramic image IA. T1 to T7 indicate shooting timing, and G1 to G7 indicate corresponding image numbers. The panoramic image IA of this example is created based on three images among the seven continuous shot images from G1 to G7 taken at the timing from T1 to T7. These three images are selected by the
また、各画像の左右端部の所定領域がのりしろ部に設定される。例えば、画像G1の左右の接続用ののりしろがH1LとH1Rである。また、画像G4の左接続用ののりしろがH4Lである。のりしろの領域は画像の左右の所定位置に設定されるものとする。そして、のりしろ判定部10aにより、こののりしろデータの一致度から2つの画像の接続の可否が判定される。
In addition, a predetermined area at the left and right ends of each image is set as a margin. For example, the left and right connection margins of the image G1 are H1L and H1R. Further, the margin for left connection of the image G4 is H4L. It is assumed that the marginal area is set at a predetermined position on the left and right of the image. Then, the
そして、のりしろ判定部10aによって、画像G1の右のりしろH1Rと、画像G4の左のりしろH4Lが一致すると判定されるものとする。ところが、T4のタイミングでの撮影画像G4の画面に柱が入るとする。つまり、T1のタイミングで取得した画像G1に対しては、ちょうどT4のタイミングで撮影したG4の画像を接続合成すれば良いのだが、この画像G4は柱が写りこんでNG画像でなる。つまり画像選択部10bにより、G4の画像がパノラマ構成画像としては適当でないので、不採用にされる。
The
そこで、画像選択部10bにより、その前のタイミングT3で撮影した画像G3が採用される。次に、のりしろ判定部10aにより、画像G3の画像の右のりしろH3Rと画像G7のH7Lが一致すると判定される。そこで画像選択部10bにより、画像G7がパノラマ構成用画像として採用される。そして、合成部15により、画像G1と画像G3と画像G7からパノラマ画像が作成される。
Therefore, the image G3 taken at the previous timing T3 is adopted by the
このように、本実施形態では、NG画像(柱が写ってしまう等)があった場合は、その前の画像を利用するようにする。これにより、合成のためののりしろ部が確保できる。NG画像の後の画像ではのりしろ部なくなって不連続になってしまう場合がありうるからである。そして、パノラマ合成に適切な画像を順次選択していく。 As described above, in this embodiment, when there is an NG image (such as a pillar being captured), the previous image is used. Thereby, the margin part for a synthesis | combination is securable. This is because the margin after the NG image may become discontinuous due to the lack of the margin. Then, images suitable for panorama synthesis are sequentially selected.
一方、上記のパノラマ画像作成では、連写画像を多く記憶させておくことが必要になる。しかし、多くの連写画像を記憶させておくとメモリ容量を圧迫し、大掛かりなシステムとなってしまう。そこで、極力少ない容量のメモリで上記パノラマ合成を行うために、連写画像データの記憶を以下で説明するようにする。 On the other hand, in the above panorama image creation, it is necessary to store many continuous shot images. However, if a large number of continuous shot images are stored, the memory capacity is reduced and the system becomes large. Therefore, in order to perform the panorama composition with a memory having as little capacity as possible, the storage of continuous shot image data will be described below.
図7は、連写撮影中の各タイミングで、記憶されるデータの内容を示すチャートである。つまり、図6で示したT1…T7の各タイミングで、メモリ8に記憶されるデータを示すチャートである。データは四角の枠で示される。G1〜G7は、記憶される画像データである。のりしろ部のデータは接続判定に利用されるので、画像G1〜G7とは別のデータとしてH1L、H1R・・・H7L、H7Rのデータとして記憶される。図中ではその記憶、削除の様子を示した。
FIG. 7 is a chart showing the contents of data stored at each timing during continuous shooting. That is, it is a chart showing data stored in the
まず、T1タイミングでは、画像G1、のりしろH1R(画像G1の右側のりしろ)およびのりしろH1L(画像G1の左側のりしろ)の各データが記憶される。続いて、T2とT3タイミングでは、G2とG3に関するデータおよびそののりしろデータが順次追加して記憶される。次のT4タイミングでは、画像G4自体は不採用であるので記憶しない。さらに、G4には、H1Rと接続可能なH4Lが存在することが、のりしろ判定部10aで判定される。これで、T4では、G2とそののりしろのデータを削除する。つまり、T1のタイミングで得たG1の画像に繋がる画像が見つかるまでは、その前の画像も記憶しておくが、T4のタイミングで接続可能な画像(G4)が見つかったので、使わない画像(G2)は削除する。
First, at the timing T1, each data of the image G1, the margin H1R (the margin on the right side of the image G1), and the margin H1L (the margin on the left side of the image G1) is stored. Subsequently, at the timings T2 and T3, data on G2 and G3 and marginal data are sequentially added and stored. At the next T4 timing, the image G4 itself is not adopted and is not stored. Further, the
このように、のりしろデータを別データとして記憶するので、これらを迅速に読み出し比較しながら、高速の判定にてパノラマ合成用画像を選択していくことが出来る。そしてこののりしろデータは、元の画像のような高精細なデータである必要はなく、データサイズを小さくして、判定が迅速にできるように加工すればさらに効果的になる。必要なデータだけを記憶するようにした。なお、このデータも適宜、取捨選択してメモリの容量に余裕を持たせるようにしている。 As described above, since the margin data is stored as separate data, it is possible to select the panorama composition image by high-speed determination while quickly reading and comparing them. This marginal data does not need to be high-definition data like the original image, and it becomes more effective if the data size is reduced and processed so that the determination can be made quickly. Only necessary data was stored. It should be noted that this data is also selected as appropriate so that the memory capacity is sufficient.
図8は、上記で述べた合成画像を得るための撮影処理を具体的に説明するためのフローチャートである。この撮影処理は、プログラムに従ったMPU10、のりしろ判定部10a、画像選択部10bおよび合成部15によって主に実行される。まず、ここでは、風景のパノラマを作成することを前提として、例えば図1の16bのモード切替SWをユーザーが操作して、パノラマ合成連写モードを選択されたものとする。このモードでの撮影時には、LD部12を用いてレンズ部2を制御し、遠距離にピントを合せる(ステップS21)。撮影し画像データを読み出す(ステップS22)。この画像データをメモリ8に仮記憶する(ステップS23)。
FIG. 8 is a flowchart for specifically explaining the photographing process for obtaining the composite image described above. This photographing process is mainly executed by the
これが連写の一枚目(最初)の撮影であるかにより処理を分ける。一枚目であれば(ステップS24YES)、撮影された画像の画面内にぼけた部分がないか(柱など手前のものがないか)を判定する(ステップS25)。画像判定部14が判定を行う。ぼけた部分がなければ(ステップS25YES)、この画像をパノラマ合成用の採用画像に選択する(ステップS27)。画像選択部10bが選択を行う。そして、のりしろデータ(画面の左右端部)もこの段階で検出して別に記憶しておく(ステップS28)。のりしろ判定部10aがこれを行う。のりしろを左右の端部に設定したことによって、画面内の必要以上の領域をモニタする必要がなくなり、効率よく接続が可能となる。端部に設定しないと、例えば図6のG1に対し、G2もG3もG4ものりしろ部を有するので、これらすべての画像一致度判定が必要になり、判定や合成の演算に多大な時間やエネルギーを要することとなるからである。一方、ボケ部など、画像に破綻が生じている場合には(ステップS25NO)、画像選択部10bはこの画像を採用しない。仮記憶した画像を消去し(ステップS26)、ステップS22に戻る。
Processing is divided depending on whether this is the first (first) continuous shooting. If it is the first image (YES in step S24), it is determined whether or not there is a blurred portion in the screen of the photographed image (whether there is no near object such as a pillar) (step S25). The
2枚目以降の画像(ステップS24NO)では、画像データの左右ののりしろデータを仮に記録する(ステップS29)。そして、のりしろ判定部10aで前回の採用画像と接続できるか否かを判定する(ステップS30)。接続できるかどうかは、2つの画像ののりしろデータを比較して、判定する。これらののりしろデータが一致して接続可能なら(ステップS30YES)、ステップS31に進む。
In the second and subsequent images (NO in step S24), margin data on the left and right of the image data is temporarily recorded (step S29). Then, the
次にステップS25と同様、この画像がぼけていたり黒いものが写っていたりして不適当でないかどうかを判定する(ステップS31)。不適当部が有れば(ステップS31YES)、ステップS23での仮記録を取り消す(ステップS32)。そして、その前のタイミングで得た画像を採用する(ステップS33)。これによって、パノラマ合成を行う素材となる画像が得られたことになる。また、不適当部がない場合(ステップS31NO)、画像選択部10bでこの画像が採用画像とされる(ステップS34)。
Next, as in step S25, it is determined whether or not this image is not appropriate due to blurring or blackness (step S31). If there is an inappropriate part (YES in step S31), the temporary recording in step S23 is canceled (step S32). Then, the image obtained at the previous timing is adopted (step S33). As a result, an image as a material for panoramic composition is obtained. If there is no inappropriate portion (NO in step S31), the
そして、それ以前に得られた画像は、図7のT3〜T4のようにすべて消去する(ステップS35)。また、消去した画像ののりしろデータ(端部)も消去する(ステップS36)。さらに前回の採用画像ののりしろデータも消去する(ステップS37)。こののりしろデータも不要になったからである。これによりメモリの記憶領域に余裕ができる。新たに採用された画像ののりしろデータを記録する(ステップS38)。最後に採用された画像ののりしろによって、次の採用画像(パノラマ素材画像)を決定するからである。 Then, all the images obtained before that are erased as indicated by T3 to T4 in FIG. 7 (step S35). Further, the margin data (edge) of the erased image is also erased (step S36). Further, the margin data of the previous adopted image is also deleted (step S37). This marginal data is no longer necessary. As a result, there is room in the storage area of the memory. The margin data of the newly adopted image is recorded (step S38). This is because the next adopted image (panoramic material image) is determined by the margin of the last adopted image.
ユーザーがレリーズ操作を終了した時や、必要な画像取得が済んだ時には(ステップS39YES)、撮影を終了し、採用された画像からパノラマ画像合成を行う(ステップS40)。パノラマ合成は、合成部15によって行なわれる。そして、このパノラマ撮影処理が終了する。それ以外は、ステップS22に戻って次の撮影データの取得を繰り返す。また、ステップS30で前回採用データとの接続ができなければステップS39に進む。
When the user finishes the release operation or when the necessary image acquisition is completed (YES in step S39), the shooting is ended and the panoramic image is synthesized from the adopted image (step S40). The panorama composition is performed by the
以上説明したように、第2実施形態によれば、カメラの連写機能や少ないメモリ容量を効率的に利用して、手前の邪魔な被写体に遮られないきれいなパノラマ画像を得ることが出来る。従来の多くのカメラでは、このようなパノラマ撮影のために広角レンズを利用するが、広い角度からの像の取得を行うためには、レンズが大型化したり、撮像素子が大型化して、カメラの携帯性が犠牲になることが多かった。本発明のカメラでは、画像処理によって連写で得た各画像をつなげていくので、途中で邪魔な障害物があっても、それを除いてその向こうにあるものをきれいに撮影することができ、かつカメラも小型化できる。このようなことは広角レンズによるパノラマ撮影では不可能である。 As described above, according to the second embodiment, it is possible to obtain a beautiful panoramic image that is not obstructed by an obstructive subject in the foreground by efficiently using the continuous shooting function and the small memory capacity of the camera. Many conventional cameras use a wide-angle lens for such panoramic photography, but in order to acquire an image from a wide angle, the size of the lens increases or the size of the image sensor increases. Portability was often sacrificed. In the camera of the present invention, images obtained by continuous shooting are connected by image processing, so even if there are obstacles on the way, it is possible to take beautiful pictures of things beyond them, And the camera can be downsized. This is not possible with panoramic photography using a wide-angle lens.
(第3実施形態)
図9から12を用いて第3実施形態について説明する。上記第1,2実施形態では車窓からの風景やパノラマ画像を撮影するシーンを説明したが、本発明は、これ以外の状況にも適用できる。第3実施形態では、本発明を室内等のシーンに適用した例を説明する。図9は、手前に窓枠のような障害物D1がある場合に、その向こうの画像を撮影するようなシーンを示す図である。この撮影方法は、カメラ1をP1の位置からP2の位置にずらしながら連写して、得られた画像I1とI2を合成して、障害物D1の影響なく向こうの景色を撮影するものである。なお本発明が適用されるカメラのブロック図は、図1と同様であるので省略する。
(Third embodiment)
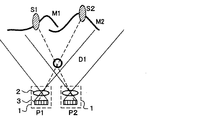
A third embodiment will be described with reference to FIGS. In the first and second embodiments described above, scenes for capturing landscapes and panoramic images from the car window have been described, but the present invention can also be applied to other situations. In the third embodiment, an example in which the present invention is applied to a scene such as a room will be described. FIG. 9 is a diagram illustrating a scene in which an image beyond that is captured when there is an obstacle D1 such as a window frame in front. In this photographing method, the
図10は、図9のシーンで、被写体像とP1とP2の位置にあるカメラ1の画角の関係を示す図である。前述の図2と同様な図である。図11は、そのP1とP2の位置にあるカメラ1で撮影された画像I1、I2および合成された画像を示す。
FIG. 10 is a diagram showing the relationship between the subject image and the angle of view of the
図10に示すように、光路上で障害物D1は、P1位置ではS2として山M2に重さなり、P2の位置ではS1として山M1重なる。つまり、P1の画像I1は山M2に障害物D1の像が重なった画像になり(図11(A)I1)、P2の画像I2は山M1に障害物D1の像が重なった画像になる(図11(B)I2)。図11(A)と(B)を比較すればわかるとおり、近くにある障害物(窓枠)D1は、三角測距の原理によって、撮像素子への入射位置が大きく変化する。対して、遠くにある山(M1、M2)は、撮像素子への入射位置はあまり変化しない。 As shown in FIG. 10, on the optical path, the obstacle D1 overlaps the mountain M2 as S2 at the position P1, and overlaps the mountain M1 as S1 at the position P2. That is, the image I1 of P1 is an image in which the image of the obstacle D1 is superimposed on the mountain M2 (FIG. 11A) I1, and the image I2 of P2 is an image in which the image of the obstacle D1 is superimposed on the mountain M1 ( FIG. 11 (B) I2). As can be seen from a comparison between FIGS. 11A and 11B, the nearby obstacle (window frame) D1 has a large incident position on the image sensor due to the principle of triangulation. On the other hand, in the mountains (M1, M2) far away, the incident position on the image sensor does not change much.
この図11からも明らかなように、画像I1ではM1の山は遮られずに撮影されているが、M2がS2で遮られている。逆に、画像I2ではM2の山は遮られておらず、M1の山がS1で遮られている。そこで、これらの2画像を利用して、(I1+I2)の合成画像で画像(C)を作成すれば、障害物(窓枠)D1の影響を受けない画像を得ることが出来る。 As is apparent from FIG. 11, in the image I1, the M1 mountain is captured without being blocked, but M2 is blocked by S2. On the contrary, in the image I2, the mountain of M2 is not blocked, and the mountain of M1 is blocked by S1. Therefore, by using these two images to create an image (C) with a composite image of (I1 + I2), an image that is not affected by the obstacle (window frame) D1 can be obtained.
図12は、上記で述べた合成画像を得るための撮影処理を具体的に説明するフローチャートである。連写画像から図11の画像(C)を得る手順である。この処理は、主にMPU10、画像判定部14、合成部15等により実行される。まず、ユーザーの連写指示により連写を実行し、連写画像を記憶する(ステップS51)。図9のようにユーザーがカメラ1の位置をP1からP2に動かしながらレリーズスイッチ1aを操作されて連続撮影が行われる。このように得られた複数の画像(連写結果)より、画面の中央部にピンボケ部(D1の影響)のないものを選択する(ステップS52)。ピンボケの有無から、画面中央の障害物の有無を判定するからである。画像判定部14がピンボケの判定を行う。
FIG. 12 is a flowchart for specifically explaining the photographing process for obtaining the composite image described above. This is a procedure for obtaining the image (C) of FIG. 11 from the continuous shot images. This process is mainly executed by the
その中から連写最初のタイミングの画像と最後のタイミングの画像を選択する(ステップS53)。最初の画像をI1として、最後の画像をI2とする。なるべく広い範囲がカバーするためである。
こうして得られた画像I1と画像I2の2像を比べ、不一致部を判定する(ステップS54)。一致するところは残し、不一致の部分では2像のうちピントの合っている方を選択する(ステップS55)。画像判定部14が、不一致部の判定や選択を行う。そして、合成部15が、一致部とピントの合っている不一致部を合成して合成画像を作成する(ステップS56)。
The first timing image and the last timing image are selected from the continuous shooting (step S53). The first image is I1, and the last image is I2. This is to cover as wide a range as possible.
The two images I1 and I2 obtained in this way are compared to determine a mismatched portion (step S54). The matching portion is left, and the in-focus portion is selected from the two images in focus (step S55). The
そして、山の稜線などが連続的に繋がって画像合成がOKかを判断する(ステップS57)。OKであれば(ステップS57YES)、この撮影処理を終了する。しかし、合成がうまく行かなかった場合は(ステップS57NO)、ステップS58に分岐して、画像I1を1番最初の画像から2番目の画像に変更する(ステップS58)。連写中に得られた別画像を利用して再度合成を試みるためである。そして、ステップS54にもどり、繰り返す。 Then, it is determined whether or not the image synthesis is OK because the ridge lines of the mountains are continuously connected (step S57). If it is OK (YES in step S57), this photographing process is terminated. However, if the composition is not successful (step S57 NO), the process branches to step S58, and the image I1 is changed from the first image to the second image (step S58). This is because another image obtained during continuous shooting is used again to try combining. And it returns to step S54 and repeats.
以上説明したように、本第3実施形態では、障害物があっても、その向こうのものをその影響をなくして撮影できるカメラを提供することが可能となる。 As described above, according to the third embodiment, it is possible to provide a camera that can photograph an object beyond the obstacle even if there is an obstacle.
(第4実施形態)
図13,14を用いて第4実施形態について説明する。上記第3実施形態では、連写撮影により得られた多くの画像から適当な画像を選択して、画像合成を行う例を説明した。しかし、多くの画像の撮影と記憶はエネルギーやメモリの無駄遣いになるおそれがある。第4実施形態では、必要最小限の撮影画像から合成画像を得るようにこれを改良する例である。連写の最初に障害物の位置を判定する撮影を行って、連写の後半に障害物の影響の受け方の異なる2画像の撮影を効率よく行うようにする。なお、本発明が適用されるカメラのブロック図は、図1と同様であるので省略する。
(Fourth embodiment)
A fourth embodiment will be described with reference to FIGS. In the third embodiment, an example in which an appropriate image is selected from many images obtained by continuous shooting and image synthesis is performed has been described. However, taking and storing many images may waste energy and memory. The fourth embodiment is an example in which this is improved so as to obtain a composite image from the minimum necessary captured image. Shooting for determining the position of an obstacle is performed at the beginning of continuous shooting, and two images having different ways of being affected by the obstacle are efficiently shot in the latter half of continuous shooting. A block diagram of a camera to which the present invention is applied is the same as that shown in FIG.
図13には、連写撮影のタイミングチャートとこの連写撮影に対応して得られる画像を対比して示す図である。具体的には、前述の図9のようなシーンで、カメラ1の位置を左から右へ移動させながら連写撮影が行われる。相対的に障害物は画面内で右から左に移動する。図13の上が連写撮影のタイミングを示し、t1、t2…が、各撮影のタイミングである。ローが撮像素子から画素信号の読出し時間である。t1、t2のタイミングで、障害物判定のために、画素の少ない画像を撮影する。図13の下が撮影された画像を示し、撮影された小サイズ画像I01、I02である。次に、t3、t4のタイミングでは、記録用に、高精細の画像を撮影する。撮影された画像が、I1、I2である。
FIG. 13 is a diagram showing a timing chart of continuous shooting and an image obtained in correspondence with the continuous shooting. Specifically, continuous shooting is performed while moving the position of the
t1、t2のタイミングで得られた小サイズ画像I01、I02から、画面内の障害物位置(画面右端から障害物の左端までの距離)X01、X02を検出する。そして、t1とt2の時間差Δtを用いて、障害物位置がどのように変化するかを予測する。この段階で画素の少ない撮影をする理由は、小サイズ画像I01、I02は障害物位置を判定するだけで、精細な画像は必要ないからである。そこで、間引きや画素加算などの技術でサイズを小さくして、消費エネルギーも少なく高速に得られることを優先している。 From the small-size images I01 and I02 obtained at the timings t1 and t2, obstacle positions (distances from the right end of the screen to the left end of the obstacle) X01 and X02 are detected. Then, how the obstacle position changes is predicted using the time difference Δt between t1 and t2. The reason for shooting with a small number of pixels at this stage is that the small-size images I01 and I02 only determine the position of the obstacle and do not require a fine image. Therefore, priority is given to reducing the size by techniques such as thinning and pixel addition, and obtaining at high speed with less energy consumption.
また、これに続いてt3のタイミングでは高精細の合成用原画像I1を撮影する。この画像I1から、障害物の左右位置X1L、X1Rを算出する。そして、合成用原画像I1では障害物によって隠れてしまった部分が、障害物の移動によって、画面に現れるタイミングで次のタイミング4の撮影を行う。これで合成用原画像I2が得られる。そしてこのI1、I2の2画像から、障害物なし画像を合成する。
Following this, a high-definition original image for synthesis I1 is taken at the timing of t3. From this image I1, the left and right positions X1L and X1R of the obstacle are calculated. Then, in the original image for synthesis I1, the
図14は、上記で述べた合成画像を得るための撮影処理を具体的に説明するためのフローチャートである。この処理は、主にMPU10により実行される。まず、撮影タイミングを管理するためのタイマーを作動させる(ステップS61)。t1、t2のタイミングで、障害物位置変化モニタ用の小サイズ画像I01、I02の撮影を行う(ステップS62、ステップS63)。この2画像の撮影の時間差をΔtとする(ステップS64)。
FIG. 14 is a flowchart for specifically explaining the photographing process for obtaining the composite image described above. This process is mainly executed by the
続いて、t3タイミングで、最初の合成用原画像I1を取得する(ステップS65)。この時のタイミングもt3として記録しておく。先に得た小サイズ画像I01とI02を比較する(ステップS66)。三角測距の原理によって、近くの障害物は動きが大きく、遠くの被写体は動きが小さいことを利用して、像の変化の大きい部分を障害物として判定する(ステップS67)。そして、先に得た2つの小サイズ画像I01、I02の中で、画面上での障害物位置を判定してX01、X02とする(ステップS68)。その障害物と同様の像パターンのものを合成用原画像I1から抽出し、それが画面上で占める範囲を判定して、障害物の左端位置をX1L、右端位置をX1Rとする(ステップS69)。 Subsequently, at the timing t3, the first composition original image I1 is acquired (step S65). The timing at this time is also recorded as t3. The small size images I01 and I02 obtained earlier are compared (step S66). Based on the principle of triangulation, a portion with a large image change is determined as an obstacle using the fact that a nearby obstacle has a large movement and a far object has a small movement (step S67). Then, the position of the obstacle on the screen is determined among the two small-size images I01 and I02 obtained earlier and set as X01 and X02 (step S68). An image with the same image pattern as the obstacle is extracted from the composition original image I1, and a range occupied on the screen is determined. The left end position of the obstacle is X1L, and the right end position is X1R (step S69). .
このようにして得られた各数値(時間t3とΔtや位置X01、X02、X1L、X1R)を利用して、画像I1で障害物によって隠された部分が全て画面に表れるタイミングt4を算出する(ステップS70)。t4は、t3に、隠された部分を障害物が通過する時間を加えた時間である。ここで、画面上での障害物の移動速度V、障害物の幅Bとすると、障害物が通過する時間は(B/V)となる。また、V=(X02−X01)/Δt、B=(X1L−X1R)となる。
従って
t4=t3+((X1L−X1R)/(X02−X01))×Δt ・・・式2
となる。
Using the numerical values (time t3 and Δt and positions X01, X02, X1L, and X1R) obtained in this way, a timing t4 at which all the parts hidden by the obstacle in the image I1 appear on the screen is calculated ( Step S70). t4 is the time obtained by adding the time for the obstacle to pass through the hidden portion to t3. Here, if the moving speed V of the obstacle on the screen and the width B of the obstacle, the time for the obstacle to pass is (B / V). Further, V = (X02−X01) / Δt and B = (X1L−X1R).
Therefore, t4 = t3 + ((X1L−X1R) / (X02−X01)) × Δt (2)
It becomes.
t4のタイミングになるのを待つ(ステップS71)。t4のタイミングになったら(ステップS71YES)、図13で示したような第二の合成用原画像I2を撮影する(ステップS72)。これも、合成したときにきれいな画像となるように、小サイズ画像I01、I02とは違って大きなサイズ(I1と同じような)で撮影する。そして、合成する。 Wait for the timing of t4 (step S71). When it is time t4 (step S71 YES), the second composition original image I2 as shown in FIG. 13 is photographed (step S72). This is also shot at a large size (similar to I1), unlike the small-size images I01 and I02, so that a beautiful image is obtained when the images are combined. Then, synthesize.
以上のように第4実施形態によれば、ユーザーのカメラ移動による障害物移動時間や速度を算出して、適当なタイミングを判定して効率的に障害物対策の2画像を取得することができる。そして、障害物の通過を算出して通過直後に第2の合成用原撮影を行うので、2つの画像のずれをより少なくできる。 As described above, according to the fourth embodiment, it is possible to efficiently obtain two images of obstacle countermeasures by calculating the obstacle moving time and speed due to the user's camera movement and determining an appropriate timing. . Then, the passage of the obstacle is calculated, and the second original photographing for synthesis is performed immediately after the passage, so that the shift between the two images can be reduced.
(第5実施形態)
図15、図16を用いて第5実施形態について説明する。第5実施形態では、さらに高速の撮像素子を利用して、予測ではなく、リアルタイムに画像状態をモニタして、最適なタイミングで、第二の合成用原画像I2を撮影するようにする。なお、本発明が適用されるカメラのブロック図は図1と同様であるので省略する。
(Fifth embodiment)
A fifth embodiment will be described with reference to FIGS. 15 and 16. In the fifth embodiment, a higher-speed imaging device is used to monitor the image state in real time instead of prediction, and the second original image for synthesis I2 is captured at an optimal timing. A block diagram of a camera to which the present invention is applied is the same as that shown in FIG.
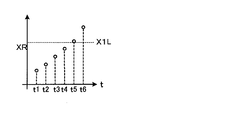
図15は、連写撮影のタイミングチャートとこの撮影に対応して得られる画像を対比して示す図である。図13と同様な図である。図15のように、t1のタイミングで第一の合成用原画像I1(第1の基準画像)を取得する。その後は検出速度を速くするために、t2からt5で比較的小さいサイズで画像を読み出す。 FIG. 15 is a diagram showing a timing chart of continuous shooting and an image obtained corresponding to this shooting. It is a figure similar to FIG. As shown in FIG. 15, the first composite original image I1 (first reference image) is acquired at the timing t1. Thereafter, in order to increase the detection speed, an image is read with a relatively small size from t2 to t5.
障害物の位置変化をグラフ化したものが、図16のグラフである。このグラフは、縦軸がXRの画面上での水平方向の座標位置、横軸が時間である。障害物の左右位置を、X(n)LとX(n)Rで示す。(n)は、タイミングの番号である。プロットがXRの位置を示し、XR位置の時間変化を示している。第一の合成用原画像I1における障害物の位置のうち、障害物が移動していく方向の端部位置がX1Lで、逆側がX1Lとなる。 The graph of FIG. 16 shows the change in the position of the obstacle as a graph. In this graph, the vertical axis indicates the horizontal coordinate position on the XR screen, and the horizontal axis indicates time. The left and right positions of the obstacle are indicated by X (n) L and X (n) R. (N) is a timing number. The plot shows the position of XR, and shows the time change of the XR position. Of the obstacle positions in the first composite original image I1, the end position in the direction in which the obstacle moves is X1L, and the opposite side is X1L.
t5のタイミングで、X5RがX1Lの位置を越える。この時点で、第1の合成用原画像I1で障害物によって隠された部分が、すべて露出することになる。そこで、XRがX1位置を越えたことが検出されると、障害物で見えなかった画像が見えるようになるので、これに続くt6のタイミングで第2の合成用原画像I2(第2の基準画像)を撮影する。これによって、I1とI2が得られるので、図12で説明したような方法によって、図11にI1+I2として示したような、障害物のない画像が合成できる。 At the timing of t5, X5R exceeds the position of X1L. At this time, all the portions hidden by the obstacle in the first composition original image I1 are exposed. Therefore, when it is detected that XR has exceeded the X1 position, an image that has not been seen by the obstacle becomes visible, so the second original image I2 for synthesis (second reference) at the timing t6 following this. Image). As a result, I1 and I2 can be obtained, so that an image without an obstacle as shown as I1 + I2 in FIG. 11 can be synthesized by the method described in FIG.
従って、この実施形態では、連写の技術や撮影方法を有効に利用して、障害物があっても、その向こうにある被写体を、それらの邪魔な影響をなくした画像として得ることが出来るカメラが提供可能となる。 Therefore, in this embodiment, a camera capable of effectively using continuous shooting technology and photographing methods to obtain an object beyond the obstacle as an image without obstructing the obstacle. Can be provided.
以上の各実施形態で説明したように、本発明によれば、高速で画像が読み出せる撮像素子を有効に利用して、連続して得られた画像から、手前の被写体に邪魔されることのない遠景の画像を得ることを可能としたカメラが提供可能である。つまり本発明により、連続して得た連写の画像を有効利用して、手前の邪魔なものによって遮られることなく、これまでのカメラでは苦労した、その向こうの静止画像を簡単迅速に得ることができる。 As described in each of the above embodiments, according to the present invention, an image sensor that can read an image at high speed is effectively used to obstruct a subject in front from images obtained in succession. It is possible to provide a camera that can obtain an image of a distant view. In other words, according to the present invention, it is possible to easily and quickly obtain a still image beyond that which has been difficult with conventional cameras without being obstructed by an obstacle in the foreground by effectively using continuous images obtained continuously. Can do.
なお以上の各実施形態において、上記各実施形態で説明したMPU10処理に関しては、一部または全てをハードウェアで構成してもよい。逆に画像判定部14、合成部15等をソフトウェアで構成しても良い。具体的な構成は設計事項である。そして、MPU10による各制御処理は、ROM11に格納されたソフトウェアプログラムがMPUに供給され、供給されたプログラムに従って上記動作させることによって実現されるものである。従って、上記ソフトウェアのプログラム自体がMPU10の機能を実現することになり、そのプログラム自体は本発明を構成する。また、そのプログラムを格納する記録媒体も本発明を構成する。記録媒体としては、フラッシュメモリ以外でも、CD−ROM、DVD等の光学記録媒体、MD等の磁気記録媒体、テープ媒体、ICカード等の半導体メモリ等を用いることができる。また、各実施形態では本願発明をデジタルカメラに適用した例を説明したが、これに限らず例えば携帯電話のカメラ部に適用しても良い。
In each of the above embodiments, part or all of the
さらに、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。 Furthermore, the present invention is not limited to the above-described embodiment as it is, and can be embodied by modifying the constituent elements without departing from the scope of the invention in the implementation stage. In addition, various inventions can be formed by appropriately combining a plurality of components disclosed in the embodiment. For example, some components may be deleted from all the components shown in the embodiment. Furthermore, constituent elements over different embodiments may be appropriately combined.
1…カメラ、2…レンズ部、3…撮像素子、4…A/D変換部、5…画像処理部、6…画像記録部、
7…表示部、8…メモリ、10…MPU、10a…のりしろ判定部、10b…画像選択部、
11…ROM、12…レンズドライブ部、13…画像取込部、14…画像判定部、15…合成部、
16…操作部、16a…レリーズスイッチ、16b、16c…モード切換スイッチ、20…被写体、
I01、I02…小サイズ画像、I1、I2…合成用原画像、f…焦点距離、
G1からG7…パノラマ用の撮影画像、T1からT7…パノラマ用画像の撮影タイミング
DESCRIPTION OF
7 ... Display unit, 8 ... Memory, 10 ... MPU, 10a ... Margin determination unit, 10b ... Image selection unit,
DESCRIPTION OF
16 ... operation unit, 16a ... release switch, 16b, 16c ... mode switch, 20 ... subject,
I01, I02 ... small size image, I1, I2 ... original image for composition, f ... focal length,
G1 to G7: panoramic shot image, T1 to T7: panoramic image shooting timing
Claims (7)
両画像の画面で共通する被写体でありながら、一方の画面だけでその被写体の障害となる
障害物が撮影されている画像を不適切な被写体が撮影された画像として、当該不適切な被
写体が撮影された画像を選択して採用不可とし、当該不適切な被写体が撮影されていない
画像を適切な被写体が撮影された画像としてこれを選択して採用画像とする画像選択部と
、
上記複数の採用画像を合成して一枚の静止画像を得る合成部とを備える
ことを特徴とするカメラ。 For a plurality of images taken successively from adjacent positions, compare the adjacent images,
An image of an object that is a subject common to both images, but where an obstacle that obstructs the subject is captured on only one screen is taken as an image of the inappropriate subject, and the inappropriate subject is captured An image selection unit that selects the selected image and makes it unusable, selects an image in which the inappropriate subject is not photographed as an image in which the suitable subject is photographed, and sets the image as a adopted image;
A camera comprising: a combining unit that combines the plurality of adopted images to obtain a single still image.
画角を連続して変えて撮影された画像の中で隣接する画像を比較して、両画像の画面に
共通する遠距離被写体でありながら、一方の画面だけで当該遠距離の被写体の前を遮るよ
うに近距離の被写体が撮影された画像が有る場合に、当該近距離の被写体が撮影された画
像についてはパノラマ用の画像として採用不可とし、当該遠距離の被写体の前を遮るよう
な近距離の被写体が撮影されていない画像をパノラマ用の画像として採用する画像選択部
と、
上記記パノラマ用の画像として採用された画像を合成してパノラマ画像を得る合成部を
備える
ことを特徴とするカメラ。 In a camera that performs panoramic shooting,
Compare adjacent images among images shot at different angles of view, and view the subject in front of the distant subject only on one screen, even though it is a far subject that is common to the screens of both images. When there is an image of a subject at a short distance so as to block it, the image taken of the subject at a short distance cannot be used as a panoramic image, An image selection unit that employs an image in which a subject at a distance is not captured as a panoramic image;
A camera comprising: a combining unit that combines the images adopted as the panoramic image to obtain a panoramic image.
撮影画像の画面内に被写体を遮る障害物が写っていないかを、上記連写撮影された複数
の画像を比較して判定する判定部と、
連写撮影された画像の画面内に被写体を遮る障害物が写っていると判定されたときは、
上記撮影画像の前後に連写された画像であって、上記障害物の写っていない前後の画像か
ら、障害物の写っている画像と同等な被写体アングルでかつ障害物の写っていない画像を
合成する画像合成部とを備える
ことを特徴とするカメラ。 A shooting control unit for controlling continuous shooting;
A determination unit that determines whether an obstacle that blocks the subject is captured in the screen of the captured image by comparing the plurality of continuously shot images;
When it is determined that an obstacle that blocks the subject appears in the continuous shot image screen,
An image that is continuously shot before and after the above-mentioned photographed image, and is composed of an image with the same subject angle and no obstacle as the image showing the obstacle from the images before and after the obstacle. A camera comprising an image synthesizing unit.
複数のパノラマ構成用の画像から一枚のパノラマ画像を合成する合成部と、
パノラマ用の連写撮影を制御する撮影制御部と、
連写撮影された画像の中からパノラマ構成用の画像を選択する画像選択部と、
撮影された画像に被写体を遮る障害物があるかを、上記パノラマ用連写撮影の結果に従
って判定する判定部と、を備え
上記画像選択部は、上記判定部により被写体を遮る障害物がないと判定された画像をパ
ノラマ構成用の画像として選択する
ことを特徴とするカメラ。 In a camera that combines multiple shot images and performs panoramic shooting,
A synthesizing unit that synthesizes a single panoramic image from a plurality of panoramic images;
A shooting control unit for controlling continuous shooting for panorama;
An image selection unit for selecting an image for panorama composition from images continuously shot;
A determination unit that determines whether there is an obstacle that blocks the subject in the captured image according to the result of the continuous shooting for panorama, and the image selection unit has no obstacle to block the subject by the determination unit A camera, wherein the determined image is selected as an image for panorama composition.
ノラマ構成用画像の一方の端部と接続可能な画像を上記パノラマ構成用の画像として選択
する、
ことを特徴とする請求項4に記載のカメラ。 The image selection unit selects an image that is determined to be free of the obstacle and that can be connected to one end of another adjacent panorama configuration image as the panorama configuration image;
The camera according to claim 4 .
撮影画像の画面内に被写体を遮る障害物が写っていないかを上記連写撮影された複数の
画像を比較して判定し、
連写撮影された画像の画面内に被写体を遮る障害物が写っていると判定されたときは、
上記撮影画像の前後に連写撮影された画像であって、上記障害物の写っていない前後の画
像から、障害物の写っている画像と同等な被写体アングルでかつ障害物の写っていない画
像を合成する
ことを特徴とする合成画像撮影方法。 In a composite image shooting method for combining images obtained by continuous shooting,
Determine whether there are any obstacles blocking the subject on the screen of the captured image by comparing the images taken by the continuous shooting above,
When it is determined that an obstacle that blocks the subject appears in the continuous shot image screen,
Images taken consecutively before and after the above-mentioned photographed image, and from the images before and after the above-mentioned obstacle is not captured with an object angle equivalent to the image of the obstacle and without any obstacle A composite image photographing method characterized by combining.
ログラムにおいて、
上記合成画像撮影方法は、撮影画像の画面内に被写体を遮る障害物が写っていないかを
上記連写撮影された複数の画像を比較して判定し、
連写撮影された画像の画面内に被写体を遮る障害物が写っていると判定されたときは、
上記撮影画像の前後に連写撮影された画像であって、上記障害物の写っていない前後の画
像から、障害物の写っている画像と同等な被写体アングルでかつ障害物の写っていない画
像を合成する
ことを特徴とするプログラム。 In a program for causing a computer to execute a composite image capturing method for combining images obtained by continuous shooting,
The composite image capturing method determines whether an obstacle that blocks the subject is captured in the screen of the captured image by comparing the plurality of continuously captured images,
When it is determined that an obstacle that blocks the subject appears in the continuous shot image screen,
Images taken consecutively before and after the above-mentioned photographed image, and from the images before and after the above-mentioned obstacle is not captured with an object angle equivalent to the image of the obstacle and without any obstacle A program characterized by composition.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006135314A JP4789695B2 (en) | 2006-05-15 | 2006-05-15 | Camera, composite image photographing method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006135314A JP4789695B2 (en) | 2006-05-15 | 2006-05-15 | Camera, composite image photographing method and program |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007305050A JP2007305050A (en) | 2007-11-22 |
| JP2007305050A5 JP2007305050A5 (en) | 2009-04-30 |
| JP4789695B2 true JP4789695B2 (en) | 2011-10-12 |
Family
ID=38838898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006135314A Expired - Fee Related JP4789695B2 (en) | 2006-05-15 | 2006-05-15 | Camera, composite image photographing method and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4789695B2 (en) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101436327B1 (en) * | 2008-07-31 | 2014-09-01 | 삼성전자주식회사 | Background Priority imaging method and imaging device |
| KR101640602B1 (en) * | 2009-12-15 | 2016-07-18 | 두산인프라코어 주식회사 | Apparatus and method for displaying dead zone of construction equipment |
| US9565416B1 (en) | 2013-09-30 | 2017-02-07 | Google Inc. | Depth-assisted focus in multi-camera systems |
| JP5827292B2 (en) * | 2013-10-29 | 2015-12-02 | 三菱電機株式会社 | refrigerator |
| US9154697B2 (en) * | 2013-12-06 | 2015-10-06 | Google Inc. | Camera selection based on occlusion of field of view |
| GB2530997B (en) * | 2014-10-06 | 2017-02-08 | Canon Kk | Method And Device For Processing An Image |
| JP5985029B2 (en) * | 2015-10-15 | 2016-09-06 | 三菱電機株式会社 | refrigerator |
| JP6743441B2 (en) * | 2016-03-23 | 2020-08-19 | 日本電気株式会社 | Image collection device, display system, image collection method and program |
| WO2018168405A1 (en) | 2017-03-16 | 2018-09-20 | 富士フイルム株式会社 | Image compositing device, image compositing method, and program |
| CN110915193B (en) * | 2017-08-09 | 2022-06-24 | 富士胶片株式会社 | Image processing system, server device, image processing method, and recording medium |
| JP7002644B2 (en) * | 2018-04-26 | 2022-01-20 | 株式会社Nttドコモ | Display imager |
| JP7358186B2 (en) * | 2019-10-17 | 2023-10-10 | キヤノン株式会社 | Information processing device, its control method and program |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09212626A (en) * | 1996-02-01 | 1997-08-15 | Hitachi Ltd | Image editing method and device therefor |
| JP3757008B2 (en) * | 1996-10-14 | 2006-03-22 | シャープ株式会社 | Image synthesizer |
| JPH114377A (en) * | 1997-06-12 | 1999-01-06 | Agency Of Ind Science & Technol | Digital still camera having moving background elimination mechanism by multiple shutter, its image method and recording medium storing image pickup control program |
| JPH11272855A (en) * | 1998-03-23 | 1999-10-08 | Leben:Kk | Method for removing obstacle from picked-up image |
| JP4399040B2 (en) * | 1998-06-17 | 2010-01-13 | カシオ計算機株式会社 | Moving object image offset method and imaging apparatus |
| JP2001189889A (en) * | 1999-12-28 | 2001-07-10 | Canon Inc | Device and method for processing picture, device and method for controlling photographing device and storage medium |
| JP2002056377A (en) * | 2000-08-08 | 2002-02-20 | Alpine Electronics Inc | Image recognition device |
| JP4169967B2 (en) * | 2001-01-10 | 2008-10-22 | 株式会社日立メディコ | Diagnostic imaging support device |
| JP2005012660A (en) * | 2003-06-20 | 2005-01-13 | Nikon Corp | Image forming method, and image forming apparatus |
-
2006
- 2006-05-15 JP JP2006135314A patent/JP4789695B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007305050A (en) | 2007-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4789695B2 (en) | Camera, composite image photographing method and program | |
| US11917299B2 (en) | Image processing device and associated methodology for generating panoramic images | |
| JP4845817B2 (en) | Imaging device, lens unit, imaging method, and control program | |
| JP5309490B2 (en) | Imaging device, subject tracking zooming method, and subject tracking zooming program | |
| US8736666B2 (en) | Imaging device, display control method and program | |
| JP5163676B2 (en) | Imaging apparatus, imaging method, and program | |
| JP2008129554A (en) | Imaging device and automatic focusing control method | |
| US20080211902A1 (en) | Imaging device | |
| JP5806623B2 (en) | Imaging apparatus, imaging method, and program | |
| JP2006245726A (en) | Digital camera | |
| JP2006295350A (en) | Imaging apparatus and method of processing imaging result | |
| WO2007071821A1 (en) | Digital panoramic camera | |
| JP2008003335A (en) | Imaging apparatus, focus control method, focus control program | |
| JP4924228B2 (en) | Image processing apparatus, image processing method, and program | |
| JP4957825B2 (en) | Imaging apparatus and program | |
| JP2003179798A (en) | Digital camera | |
| JPH1188811A (en) | Camcorder and photographing method | |
| JP2013009435A (en) | Imaging apparatus, object tracking zooming method and object tracking zooming program | |
| JP4751715B2 (en) | Imaging device | |
| JP4786452B2 (en) | camera | |
| JP4236358B2 (en) | Electronic camera with electronic viewfinder | |
| JP2009044409A (en) | Digital camera | |
| JPH0560714B2 (en) | ||
| JP5637400B2 (en) | Imaging apparatus and program | |
| JP4518961B2 (en) | Digital camera |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090313 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110705 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110719 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4789695 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |