JP4789244B2 - Magnetic resonance imaging system - Google Patents
Magnetic resonance imaging system Download PDFInfo
- Publication number
- JP4789244B2 JP4789244B2 JP2006004919A JP2006004919A JP4789244B2 JP 4789244 B2 JP4789244 B2 JP 4789244B2 JP 2006004919 A JP2006004919 A JP 2006004919A JP 2006004919 A JP2006004919 A JP 2006004919A JP 4789244 B2 JP4789244 B2 JP 4789244B2
- Authority
- JP
- Japan
- Prior art keywords
- navigator
- sequence
- magnetic resonance
- resonance imaging
- imaging apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Magnetic Resonance Imaging Apparatus (AREA)
Description
本発明は、被検体中の水素や燐等からの核磁気共鳴(NMR)信号を測定し、核の密度分布や緩和時間分布等を映像化する磁気共鳴イメージング装置(MRI装置)に関する。 The present invention relates to a magnetic resonance imaging apparatus (MRI apparatus) that measures nuclear magnetic resonance (NMR) signals from hydrogen, phosphorus, and the like in a subject and visualizes nuclear density distribution, relaxation time distribution, and the like.
近年、心臓MRIの臨床適用が一般化している。この心臓MRIでは、心拍動によるアーチファクトが問題となり、このアーチファクトを除去するための技術が特許文献1に記載されている。
In recent years, clinical applications of cardiac MRI have become common. In this cardiac MRI, an artifact caused by heartbeat becomes a problem, and a technique for removing this artifact is described in
また、心臓MRIでは、呼吸動によるアーチファクトが間題であり、呼吸動アーチファクトの抑制方法として、一般的に用いられている手法が、付加的なエコーであるナビゲーターエコーを用いて呼吸動をモニターする方法である(非特許文献1)。 In addition, in the cardiac MRI, artifacts due to respiratory motion are an issue, and as a method for suppressing respiratory motion artifacts, a commonly used technique is to monitor respiratory motion using navigator echo, which is an additional echo. It is a method (nonpatent literature 1).
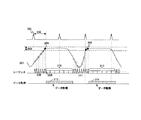
心臓撮影における、ナビゲーターエコーを用いた呼吸動アーチファクト低減方法の一例を図10を参照して説明する。この図10は心電同期併用でナビゲーターエコーを用いた呼吸ゲーティング撮影のシーケンス図である(非特許文献2)。 An example of a respiratory motion artifact reduction method using navigator echo in cardiac imaging will be described with reference to FIG. FIG. 10 is a sequence diagram of respiratory gating imaging using navigator echo in combination with electrocardiogram synchronization (Non-Patent Document 2).
図10において、心電波101を検出後、設定したディレイタイム107の後に、本計測(マルチフェーズ撮影)109が実行されるタイミングで、ナビゲーターシーケンス108を実行する。ナビゲーターシーケンス108によって取得されたナビゲーターエコーにより着目部位の呼吸動による変位104を得る。
In FIG. 10, the
ナビゲーターシーケンス108に続いて本計測シーケンス109を実行する。ここで、ナビゲーターシーケンス108、112によって得られた変位104、106のように、予め設定した狭いウインドウ(ゲートウインドウ)103から外れている場合、本計測109、113によって得られたデータは破棄する(破棄データ114、115)。
Following the
逆に、ナビゲータシーケンス110にて検出した変位105のように、ウインドウ103内にある場合は、ナビゲータシーケンス110の直後のシーケンス111のデータは取得する(取得データ115)。このような本計測データの取得制御を繰り返し、画像再構成に必要なデータ取得が完了したら終了する。この手法により、ほぼ同じ変位においてデータを取得することで呼吸動による体動の影響が大きく低減された画像が得られる。
On the contrary, if the
しかしながら、上記従来技術にあっては、破棄データ114、116のように破棄するデータが多いため、データ取得効率の低下が間題である。また、本計測が心臓のマルチフェーズ撮影の場合、ナビゲーターエコーを取得している間の心時相は撮影できないため、全心周期のシネ画像が取得できない間題もある。
However, in the above prior art, since there is a lot of data to be discarded, such as the discarded
図11は、5フェーズのシネ画像を4心拍で撮影する例である。心電波201の直後の心時相(収縮初期220)は、ナビゲーターエコーの取得を行っているため、本計測ができない。つまり、図12に示すように、心臓撮影の場合は、心電波Rを検出した後、ナビゲータシーケンス、空打ち、本計測シーケンスの順に実行するため、ナビゲータシーケンス、空打ちの間は本計測ができない。 FIG. 11 is an example in which a 5-phase cine image is taken with 4 heartbeats. Since the navigator echo is acquired during the cardiac phase immediately after the cardiac radio wave 201 (initial contraction 220), this measurement cannot be performed. That is, as shown in FIG. 12, in the case of cardiac imaging, since the radio wave R is detected, the navigator sequence, the idle shot, and the main measurement sequence are executed in this order. .
心臓撮影の場合、本計測に用いるパルスシーケンスは、図13に示すようなSSFPシーケンスを行なうのが一般的である(TR=3〜6ms)。そのため、ナビゲータシーケンスを実行したことで壊れた定常状態を回復するために、空打ち(一般的に10〜20回)が必要であり、上述したように、空打ちの間も本計測ができない。 In the case of cardiac imaging, the pulse sequence used for this measurement is generally an SSFP sequence as shown in FIG. 13 (TR = 3 to 6 ms). Therefore, in order to recover the steady state broken by executing the navigator sequence, blank shots (generally 10 to 20 times) are necessary, and as described above, this measurement cannot be performed even during blank shots.
シネ画像は、通常、駆出率などを求める心機能解析に用いられるのだが、上述したような不完全なシネ画像を用いて心機能解析を行うと、正しい結果が得られない可能性がある。 Cine images are usually used for cardiac function analysis to determine ejection fraction, etc. However, if cardiac function analysis is performed using incomplete cine images as described above, correct results may not be obtained. .
本発明の目的は、ナビゲータシーケンスを用いた撮影において、データ取得効率が高く、撮影時間を短縮可能な磁気共鳴イメージング装置を実現することである。 An object of the present invention is to realize a magnetic resonance imaging apparatus that has high data acquisition efficiency and can shorten the imaging time in imaging using a navigator sequence.
本発明の磁気共鳴イメージング装置は、静磁場発生手段と、傾斜磁場発生手段と、高周波信号送受信手段と、被検体から発生された核磁気共鳴信号に基づいて画像を再構成する画像再構成手段と、静磁場発生手段、傾斜磁場発生手段、高周波信号送受信手段及び画像再構成手段の動作を制御する制御手段とを備える。 The magnetic resonance imaging apparatus of the present invention includes a static magnetic field generating means, a gradient magnetic field generating means, a high frequency signal transmitting / receiving means, and an image reconstructing means for reconstructing an image based on a nuclear magnetic resonance signal generated from a subject. , A static magnetic field generating means, a gradient magnetic field generating means, a high frequency signal transmitting / receiving means, and a control means for controlling operations of the image reconstruction means.
そして、上記制御手段は、ナビゲーターエコーシーケンスを用いて、ナビゲーターエコーを取得し、被検体の呼吸動による変位を検出して、この変位が予め設定した範囲内であると判断したとき、ナビゲーターエコーシンケンスを停止して、被検体の画像撮像シーケンスを実行させる。 Then, the control means acquires the navigator echo using the navigator echo sequence, detects the displacement due to the respiratory motion of the subject, and determines that the displacement is within a preset range. And the imaging sequence of the subject is executed.
また、本発明の磁気共鳴イメージング装置は、被検体の心電波を検出する心電波検出手段を備え、制御手段は、心電波検出手段により検出された心電波の複数の周期毎に、互いに異なるタイミングでナビゲータエコーシンケンスを実行させ、心電波の複数の周期で行なわれた画像撮像シーケンスにより取得したエコーデータを用いて画像再構成させる。 In addition, the magnetic resonance imaging apparatus of the present invention includes a cardiac radio wave detection unit that detects a cardiac radio wave of the subject, and the control unit has different timings for each of a plurality of cycles of the cardiac radio wave detected by the cardiac radio wave detection unit. The navigator echo sequence is executed in step S1, and the image is reconstructed using the echo data acquired by the image capturing sequence performed at a plurality of periods of the cardiac radio wave.
本発明によれば、ナビゲータシーケンスを用いた撮影において、データ取得効率が高く、撮影時間を短縮可能な磁気共鳴イメージング装置を実現することができる。 According to the present invention, it is possible to realize a magnetic resonance imaging apparatus that has high data acquisition efficiency and can shorten the imaging time in imaging using a navigator sequence.
以下、本発明の実施形態を添付図面を参照して説明する。
図1は、本発明が適用されるMRI装置の概略構成図である。
図1において、MRI装置は、被検体401の周囲に静磁場を発生する磁石402と、静磁場空間に傾斜磁場を発生する傾斜磁場コイル403と、静磁場空間領域に高周波磁場を発生するRFコイル404と、被検体401が発生するMR信号を検出するRFプローブ405とを備える。
ここで、傾斜磁場コイル403は、X、Y、Zの3方向の傾斜磁場コイルで構成され、傾斜磁場電源409からの信号に応じてそれぞれ傾斜磁場を発生する。
Embodiments of the present invention will be described below with reference to the accompanying drawings.
FIG. 1 is a schematic configuration diagram of an MRI apparatus to which the present invention is applied.
In FIG. 1, an MRI apparatus includes a
Here, the gradient
RFコイル404は、RF送信部410の信号に応じて高周波磁場を発生する。また、RFプローブ405で受信した信号は、信号検出部406で検出され、信号処理部407で信号処理され、また計算により画像信号に変換され、画像は表示部408で表示される。
傾斜磁場電源409、RF送信部410、信号検出部406は制御部411で制御され、制御のタイムチャートは一般にパルスシーケンスと呼ばれている。ベッド412は被検体が横たわるためのものである。
The RF coil 404 generates a high-frequency magnetic field according to the signal from the
The gradient magnetic
上記MRI装置において、傾斜磁場により異なる位相エンコードを与え、それぞれの位相エンコードで得られるエコー信号を検出する。位相エンコードの数は通常1枚の画像あたり128、256、512等の値が選ばれる。各エコー信号は通常128、256、512、1024個のサンプリングデータからなる時系列信号として得られる。これらのデータを2次元フーリエ変換して1枚のMR画像を作成する。
心電計413は、被検体401の心電波を検出し、制御部411に供給する。
In the MRI apparatus, different phase encodings are given depending on the gradient magnetic field, and echo signals obtained by the respective phase encodings are detected. As the number of phase encodings, values such as 128, 256, and 512 are usually selected per image. Each echo signal is usually obtained as a time-series signal composed of 128, 256, 512, and 1024 sampling data. These data are two-dimensionally Fourier transformed to create one MR image.
The electrocardiograph 413 detects the electrocardiogram of the
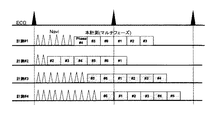
次に、本発明の第1の実施形態におけるナビゲーターシーケンスを図2を参照して説明する。この第1の実施形態は、心電同期併用のマルチフェーズ撮影の場合の例である。以下に示す動作の制御は、制御部411によって実行される。
Next, a navigator sequence according to the first embodiment of the present invention will be described with reference to FIG. The first embodiment is an example in the case of multiphase imaging combined with electrocardiogram synchronization. The control of the operation shown below is executed by the
図2において、心電計413からの心電波301を制御部411が検出後、ナビゲーターシーケンス308を連続して実行し、呼吸動をモニターする。ここで、ナビゲーターシーケンス308は、複数回連続して行なわれ、1回のナビゲーターシーケンスの実行期間は、本撮影310の1心時相(フェーズ)の時間309の倍数となるように管理する。
In FIG. 2, after the
これは、通常、マルチフェースエコーデータの取得が、複数の心周期に渡って行われるため、心電波からの遅延時間302がランダムにずれると、1つの画像の中に異なる心時相のデータが混在するためである。
This is because acquisition of multi-face echo data is usually performed over a plurality of cardiac cycles, and therefore, when the
ナビゲーターエコーでモニターした呼吸変位307が、変位304のように予め設定しておいたゲートウインドウ303内に入ったら、その後、本計測310を実行し、マルチフェーズエコーデータを取得する(取得データ313)。本計測310で1心周期分のデータが取得できたら、再び、ナビゲーターシーケンス311を連続して実行し、呼吸動変位をモニターする。
When the
モニターした呼吸動変位が変位305のようにゲートウインドウ303内に入った時点で、次の心周期の本計測312を実行し、データ312を取得する。図2において、変位305が2点あるのは、上述のように、ナビゲーターシーケンスの実行時間が1フェーズの倍数となるように調整しているためである。以降、同様な制御を繰り返し、必要なデータが全て取得できた時点で計測を終了する。
When the monitored respiratory motion displacement enters the
例えば、位相エンコード数128のとき、1回の本計測で32エコー取得すると、4回の計測で1画像分のデータが敢得できることとなり、例えば、図3に示すような状態で全データ取得完了となる。以上のような計測法により、全身周期をカバーするマルチフェーズ画像が取得できる。 For example, when the number of phase encoding is 128, if 32 echoes are acquired in one main measurement, data for one image can be obtained in four measurements. For example, all data acquisition is completed in the state shown in FIG. It becomes. By the measurement method as described above, a multi-phase image covering the whole body cycle can be acquired.
以上のように、本発明の第1の実施形態によれば、心電波を検出後、ナビゲータシーケンス308を行って呼吸動をモニターし、呼吸変位がゲートウインドウ303内に入ったら、本計測を実行し、マルチフェーズエコーデータを取得する。
これにより、呼吸変位がゲートウインドウ外の場合に、本計測を開始してしまい、取得したデータが不要となってしまうことを回避し、データ取得効率が高く、撮影時間を短縮可能な磁気共鳴イメージング装置を実現することができる。
As described above, according to the first embodiment of the present invention, after detecting the cardiac radio wave, the navigator sequence 308 is performed to monitor the respiratory motion, and when the respiratory displacement enters the
As a result, when the respiratory displacement is outside the gate window, the main measurement is started, and it is avoided that the acquired data becomes unnecessary, the data acquisition efficiency is high, and the magnetic resonance imaging capable of shortening the imaging time An apparatus can be realized.
また、ナビゲーターシーケンスの実行タイミングを変えることで、例えば、心臓撮影において、全心周期のエコーデータ取得が可能となる。 Further, by changing the execution timing of the navigator sequence, for example, echo data of the whole cardiac cycle can be acquired in cardiac imaging.
次の、本発明の第2の実施形態について、説明する。
この第2の実施形態においては、上述した図3に示したような計測が行われた場合、画質をより向上させるために、ナビゲーターエコーを取得したタイミングと、本計測データを取得したタイミングとの関係に応じて、本計測データのk空間への配置順を調整する。
Next, a second embodiment of the present invention will be described.
In the second embodiment, when the measurement as shown in FIG. 3 described above is performed, in order to further improve the image quality, the timing at which the navigator echo is acquired and the timing at which the main measurement data is acquired The arrangement order of the main measurement data in the k space is adjusted according to the relationship.
ナビゲーター呼吸ゲート法では、ナビゲーターエコーによってモニターされた呼吸動変位に基づいて、本計測のデータ取得制御を行っている。そのため、ナビゲーターエコー取得時に近いタイミングで取得した本計測データほど、ゲートウインドウ位置に近い呼吸動変位のデータである。そのため、ナビゲーターエコー取得直後の本計測データを画質に影響の大きな低周波数領域に配置し、ナビゲーター取得から最も時間が経過してから取得した本計測データを高周波数領域に配置する。 In the navigator breathing gate method, data acquisition control of this measurement is performed based on the respiratory movement displacement monitored by the navigator echo. For this reason, the main measurement data acquired at a timing closer to the acquisition of the navigator echo is the respiratory movement displacement data closer to the gate window position. For this reason, the main measurement data immediately after navigator echo acquisition is arranged in a low frequency region having a large influence on image quality, and the main measurement data acquired after the most time has elapsed since navigator acquisition is arranged in the high frequency region.
例えば、図3のPhase♯1のデータであれば、図4の(A)に示すように、最もナビゲーターエコーに近いタイミングで取得した計測♯4のデータが、最低域に配置され、ナビゲーターエコーから遠くなるに従い、計測♯3、計測♯1、計測♯2の順で高域側に配置される。
For example, in the case of
他の心時相においても制御方法は同様であり、図4の(B)に示したPhase♯5の例では、低域から順に計測♯3、計測♯1、計測♯2、計測♯4となる。このような制御により、より画質を向上することができる。
他の構成は、第1の実施形態と同様であるので、詳細な説明は省略する。
The control method is the same in other cardiac phases. In the example of
Since other configurations are the same as those of the first embodiment, detailed description thereof is omitted.
次に、本発明の第3の実施形態について説明する。
上述した図3に示す例では、呼吸変位がゲートウインドウ内に入るまでナビゲーターシーケンスを繰り返す方法で全心周期分のデータ取得を行ったが、この第3の実施形態においては、他の手法により全心周期分のデータ取得を行なう。
Next, a third embodiment of the present invention will be described.
In the example shown in FIG. 3 described above, data for the whole cardiac cycle is acquired by a method in which the navigator sequence is repeated until the respiratory displacement enters the gate window. However, in this third embodiment, all the data are acquired by other methods. Acquire data for the cardiac cycle.
図5は、本発明の第3の実施形態におけるマルチフェーズ撮影の説明図である。図5において、ナビゲーターシーケンスの繰り返し時間を、例えば1心時相分とし、ナビゲーターシーケンスの実行タイミングを異なる心時相にずらしながら、呼吸変位がゲートウインドウに入った後に本計測を行う。このような制御により、図3に示した例と同様に、全心周期のマルチフェーズ画像を取得することができる。 FIG. 5 is an explanatory diagram of multiphase imaging according to the third embodiment of the present invention. In FIG. 5, the repetition time of the navigator sequence is set to, for example, one cardiac time phase, and the main measurement is performed after the respiratory displacement enters the gate window while shifting the execution timing of the navigator sequence to a different cardiac time phase. By such control, a multi-phase image of the whole cardiac cycle can be acquired as in the example shown in FIG.
この第3の実施形態においては、データ取得効率が、図3に示した例比べて低下するが、ナビゲーターエコーを取得してから最も時間的に離れた本計測データ取得までが、図3に示した例の場合に比べて短いので、より呼吸動の影響が抑制された画像となる。また、第2の実施形態と同様に、ナビゲーターエコーに近い時刻に取得した本計測データから順に、k空間の低周波数領域に配置することで、更に画質向上を図ることが可能である(図6の(A)、(B))。
図5に示した第3の実施形態は、ナビゲーターエコーによる呼吸動変位が毎回ゲートウインドウ内の理想的な例であるが、実際には、ゲートウインドウから外れることが容易にありうる。そのような場合を図7に示す。
In the third embodiment, the data acquisition efficiency is lower than that in the example shown in FIG. 3, but the time from the acquisition of the navigator echo to the acquisition of the main measurement data that is most distant in time is shown in FIG. Since this is shorter than the case of the above example, the image is further suppressed in the influence of respiratory motion. Similarly to the second embodiment, the image quality can be further improved by arranging the measurement data in the low frequency region of the k space sequentially from the main measurement data acquired at a time close to the navigator echo (FIG. 6). (A), (B)).
The third embodiment shown in FIG. 5 is an ideal example in which the respiratory movement displacement caused by the navigator echo is in the gate window every time. However, in practice, it can easily deviate from the gate window. Such a case is shown in FIG.
図7において、計測♯1、計測♯2では、図5の場合と同様に、呼吸動変位がゲートウインドウ内(図7中「OK」と表記)であったとする。続く計測♯3で、Phase♯3の時刻に計測したナビゲーターエコーにおいて、呼吸動変位がゲートウインドウから外れていたとすると(図7中「NG」と表記)、ナビゲーターシーケンスを続くPhase♯4でも実行する。ここで、Phase♯4のナビゲーターエコーで呼吸変位がゲートウインドウ内であることが確認できたら、本計測を実行し、データを取得する。
In FIG. 7, in
続いて、計測♯3とは異なるタイミングでナビゲーターエコーを取得し、「0K」であれば本計測データを取得する(計測♯4のPhase♯4〜計測♯5のPhase♯3)。本計測実行後、再び、ナビゲーターエコーを取得し、「0K」と判定されるまでナビゲーターを実行する。
Subsequently, a navigator echo is acquired at a timing different from that of
ここで、計測♯6のように、計測♯1と全く同じタイミングで取得したナビゲーターエコーで「0K」と判定されたとする。このような場合、計測♯6で取得されたデータは、S/N向上のために計測♯1に積算される。以降、同様にナビゲーターによる判定を繰り返し、全ての心周期でエコーデータが取得できた時点で計測を終了する。
Here, as in
この第3の実施形態において、他の構成は、第1の実施形態と同様であるので、詳細な説明は省略する。 In the third embodiment, other configurations are the same as those of the first embodiment, and thus detailed description thereof is omitted.
次に本発明の第4の実施形態について説明する。
上述した本発明の第1〜3の実施形態では、マルチフェーズ撮影への適用例を示したが、他のプリパルスが付いたシングルフェーズのトリガー撮影にも本発明を適用することができる。
Next, a fourth embodiment of the present invention will be described.
In the above-described first to third embodiments of the present invention, the application example to the multi-phase imaging has been described. However, the present invention can also be applied to single-phase trigger imaging with other prepulses.
本発明の第4の実施形態は、本発明を他のプリパルスが付いたシングルフェーズのトリガー撮影に適用した場合の例である。図8は、第4の実施形態である脂肪抑制パルス付きのトリガー撮影の説明図である。図8において、ナビゲーターシーケンス708を連続して実行して、呼吸動をモニターし、呼吸動の変位がゲートウインドウ703内に入ったら(変位704)、本計測710を実行する。
The fourth embodiment of the present invention is an example when the present invention is applied to single-phase trigger imaging with other prepulses. FIG. 8 is an explanatory diagram of trigger imaging with a fat suppression pulse according to the fourth embodiment. In FIG. 8, the
ここで、本計測の前に付加されている709が脂肪抑制パルスである。本計測710は100〜200ms程度のシングルフェーズ撮影で、第1の実施形態と同様の理由で、ナビゲーターを連続して実行する時間は本計測の時間の倍数で制御される。
この手法により、第1の実施形態と同様な効果を得ることができる他、心電波701からの遅延時間702が異なる脂肪抑制画像が取得可能である。
Here, 709 added before the main measurement is a fat suppression pulse. The
By this method, the same effect as that of the first embodiment can be obtained, and fat suppression images having different delay times 702 from the
この第4の実施形態は、例えば、複数の心時相における冠状動脈の形態を観察する手法などに適用できる。更に、図5に示したナビゲーターシーケンスを脂肪抑制パルスに置き換えて、息止め状態で撮影することでも、同様に全心周親の冠状動脈マルチフェーズ画像を取得可能である。 This fourth embodiment can be applied to, for example, a method for observing the coronary artery morphology in a plurality of cardiac phases. Furthermore, the coronary artery multi-phase image of the whole heart parent can be acquired in the same manner by replacing the navigator sequence shown in FIG. 5 with a fat suppression pulse and taking a picture in the breath holding state.
次に、本発明の第5の実施形態について説明する。
上述した第1〜4の実施形態は、心電波(脈波)同期と併用した、心臓をターゲットとした撮影への適用例であったが、非同期撮影でも本発明は適用可能である。本発明の第5の実施形態は、非同期撮影に適用した場合の例である。
Next, a fifth embodiment of the present invention will be described.
The first to fourth embodiments described above are examples of application to imaging targeting the heart in combination with cardiac radio wave (pulse wave) synchronization, but the present invention can also be applied to asynchronous imaging. The fifth embodiment of the present invention is an example when applied to asynchronous shooting.
図9は本発明の第5の実施形態の説明図である。
図9に示すように、まず、ナビゲーターシーケンス605を連続的に繰り返し実行し、呼吸動変位をモニターする。モニターした変位がゲートウインドウ601に入ったら(変位602)、本計測606を実行する。この計測は非同期であるため、本計測は1スライス分のデータ取得完了まで一度に実行する。
FIG. 9 is an explanatory diagram of the fifth embodiment of the present invention.
As shown in FIG. 9, first, the
すなわち、本計測606、608、610でそれぞれ1スライスづつ画像が取得される。加えて、本計測の実行時間とナビゲーターの実行時間とを関連付けて管理する必要がないので、変位603、604のように、1回ナビゲーターを実行して、変位がゲートウインドウ601内と判断したら、即座に本計測が実行される。
この第5の実施形態は、第1の実施形態と同様な効果を得ることができる他、心電同期が不要で、呼吸動抑制が必須の腹部撮影などに有効である。
That is, an image is acquired for each slice in the
The fifth embodiment can obtain the same effects as those of the first embodiment, and is effective for abdominal radiography that does not require electrocardiogram synchronization and in which respiratory motion suppression is essential.
なお、上述した例では、被検体の心電波を用いたが、被検体の脈波に同期して計測を行なってもよい。 In the example described above, the cardiac radio wave of the subject is used, but the measurement may be performed in synchronization with the pulse wave of the subject.
401 被検体
402 静磁場磁石
403 傾斜磁場コイル
404 RFコイル
405 RFプローブ
406 信号検出部
407 信号処理部
408 表示部
409 傾斜磁場電源
410 RF送信部
411 制御部
412 ベッド
413 心電計
401
Claims (9)
上記制御手段は、
ナビゲーターシーケンスを用いて、ナビゲーターエコーを取得して上記被検体の呼吸動による変位を検出し、検出した変位が予め設定した範囲内か否かを判断し、上記変位が予め設定した範囲内であると判断したとき、上記ナビゲーターシンケンスを停止して、被検体の画像撮像シーケンスを実行させる磁気共鳴イメージング装置であって、
被検体の心電波を検出する心電波検出手段を備え、
上記制御手段は、上記心電波検出手段により検出された心電波の複数の周期で、互いに異なるタイミングでナビゲーターシンケンスを実行させ、上記心電波の複数の周期で行なわれた画像撮像シーケンスにより取得したエコーデータを用いて画像再構成させることを特徴とする磁気共鳴イメージング装置。 Static magnetic field generation means, gradient magnetic field generation means, high-frequency signal transmission / reception means, image reconstruction means for reconstructing an image based on echo data from the subject received by the high-frequency transmission / reception means, and the static magnetic field generation means A control means for controlling the operation of the gradient magnetic field generating means, the high-frequency signal transmitting / receiving means and the image reconstruction means ,
The control means includes
Using a navigator sequence, navigator echoes are acquired to detect displacement due to respiratory motion of the subject, and it is determined whether the detected displacement is within a preset range, and the displacement is within a preset range. when it is determined that, by stopping the navigator Shinkenger scan, a magnetic resonance imaging apparatus for executing the image capturing sequence of the subject,
Comprising an electrocardiogram detection means for detecting the electrocardiogram of the subject;
The control means causes navigator sequences to be executed at different timings in a plurality of periods of the cardiac radio waves detected by the cardiac radio wave detection means, and acquired by an image capturing sequence performed in the multiple periods of the cardiac radio waves. A magnetic resonance imaging apparatus for reconstructing an image using echo data .
上記制御手段は、
ナビゲーターシーケンスを用いて、ナビゲーターエコーを取得して上記被検体の呼吸動による変位を検出し、検出した変位が予め設定した範囲内か否かを判断し、上記変位が予め設定した範囲内であると判断したとき、上記ナビゲーターシンケンスを停止して、被検体の画像撮像シーケンスを実行させる磁気共鳴イメージング装置であって、
被検体の心電波を検出する心電波検出手段を備え、
上記制御手段は、上記心電波の一周期を複数の心時相に分割して、上記心電波の複数の周期で、上記ナビゲーターシーケンスを実行する期間を異ならせて、上記画像撮像シーケンスを実行させ、取得されたエコーデータを用いて画像再構成させて複数の心時相の画像をそれぞれ取得することを特徴とする磁気共鳴イメージング装置。 Static magnetic field generation means, gradient magnetic field generation means, high-frequency signal transmission / reception means, image reconstruction means for reconstructing an image based on echo data from the subject received by the high-frequency transmission / reception means, and the static magnetic field generation means A control means for controlling the operation of the gradient magnetic field generating means, the high-frequency signal transmitting / receiving means and the image reconstruction means,
The control means includes
Using a navigator sequence, navigator echoes are acquired to detect displacement due to respiratory motion of the subject, and it is determined whether the detected displacement is within a preset range, and the displacement is within a preset range. A magnetic resonance imaging apparatus that stops the navigator sequence and executes an image imaging sequence of a subject when it is determined,
Comprising an electrocardiogram detection means for detecting the electrocardiogram of the subject;
The control means divides one cycle of the electrocardiogram into a plurality of cardiac time phases, and executes the image capturing sequence by changing a period for executing the navigator sequence at a plurality of cycles of the electrocardiogram. A magnetic resonance imaging apparatus characterized in that an image is reconstructed using the acquired echo data to acquire a plurality of cardiac phase images .
上記ナビゲーターシーケンスは、複数回連続して行なわれ、1回のナビゲーターシーケンスの実行期間は、一つの心時相の時間の倍数であることを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus請Motomeko 2,
The navigator sequence is performed continuously a plurality of times, and the execution period of one navigator sequence is a multiple of the time of one cardiac time phase .
上記制御手段は、ナビゲーターエコー取得タイミングと画像撮像シーケンスによるエコーデータ取得タイミングとの関係に応じて、複数の画像撮像シーケンスによるエコーデータのk空間配置順を制御して、画像を再構成させることを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus according to claim 1 or 2,
The control means controls the order of k-space arrangement of echo data by a plurality of image capturing sequences in accordance with the relationship between the navigator echo acquisition timing and the echo data acquisition timing by the image capturing sequence to reconstruct an image. A magnetic resonance imaging apparatus.
上記制御手段は、画像撮像シーケンスによるエコーデータのうち、上記変位が予め設定した範囲内であると判断したときのナビゲーターエコーに近い時刻に取得したエコーデータから順に、k空間の低周波領域に配置して画像を再構成させることを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus according to claim 4.
The control means arranges the echo data in the low frequency region of the k space in order from the echo data acquired at a time close to the navigator echo when the displacement is determined to be within a preset range among the echo data by the imaging sequence. A magnetic resonance imaging apparatus characterized in that an image is reconstructed .
上記制御手段は、上記ナビゲーターシーケンスの実行期間を、上記心電波の互いに時間的に隣接する周期において、上記所定の心時相分だけ、時間的に異ならせることを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus according to claim 2.
The magnetic resonance imaging apparatus characterized in that the control means makes the execution period of the navigator sequence different in time by the predetermined cardiac phase in a period adjacent to the cardiac radio wave in time .
上記制御手段は、上記心電波の周期毎に、上記所定の心時相分だけナビゲーターシーケンスを実行し検出した上記被検体の呼吸動による変位が予め設定した範囲外であると判断したとき、上記所定の心時相に続く心時相でナビゲーターシーケンスを実行することを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus according to claim 6.
When the control means determines that the displacement due to the respiratory motion of the subject detected by executing the navigator sequence for the predetermined cardiac phase for each period of the cardiac radio wave is outside a preset range, A magnetic resonance imaging apparatus , wherein a navigator sequence is executed in a cardiac phase following a predetermined cardiac phase .
上記制御手段は、上記心電波の複数の周期のうち、ナビゲーターシーケンスが実行された心時相が、互いに時間的に対応し、かつ、上記被検体の呼吸動による変位が予め設定した範囲内であるときに実行された上記被検体の画像撮像シーケンスにより得られたデータを積算することを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus according to claim 7.
The control means includes a plurality of periods of the cardiac radio waves in which a cardiac time phase in which a navigator sequence is executed corresponds to each other in time, and a displacement due to respiratory motion of the subject is within a preset range. A magnetic resonance imaging apparatus that integrates data obtained by an imaging sequence of the subject executed at a certain time .
上記制御手段は、上記ナビゲーターシーケンスを停止後、上記画像撮像シーケンスの実行に先だって、プリパルスを印加することを特徴とする磁気共鳴イメージング装置。 The magnetic resonance imaging apparatus according to any one of claims 1 to 8,
The control means applies a pre-pulse after the navigator sequence is stopped and prior to the execution of the image capturing sequence .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006004919A JP4789244B2 (en) | 2006-01-12 | 2006-01-12 | Magnetic resonance imaging system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006004919A JP4789244B2 (en) | 2006-01-12 | 2006-01-12 | Magnetic resonance imaging system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007185300A JP2007185300A (en) | 2007-07-26 |
| JP2007185300A5 JP2007185300A5 (en) | 2009-02-19 |
| JP4789244B2 true JP4789244B2 (en) | 2011-10-12 |
Family
ID=38340882
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006004919A Expired - Fee Related JP4789244B2 (en) | 2006-01-12 | 2006-01-12 | Magnetic resonance imaging system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4789244B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103376434A (en) * | 2012-04-20 | 2013-10-30 | 西门子公司 | Method for the acquisition of a measurement data set of a respirating examination subject by means of magnetic resonance technology |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5337385B2 (en) * | 2008-01-29 | 2013-11-06 | 株式会社東芝 | Magnetic resonance imaging system |
| US8971992B2 (en) | 2007-05-07 | 2015-03-03 | Kabushiki Kaisha Toshiba | Magnetic resonance imaging apparatus and control method thereof |
| JP6008839B2 (en) * | 2011-04-01 | 2016-10-19 | 株式会社日立製作所 | Magnetic resonance imaging apparatus and magnetic resonance imaging method |
| DE102011007850B4 (en) * | 2011-04-21 | 2015-05-13 | Siemens Aktiengesellschaft | Method for the triggered acquisition of measurement data by means of a magnetic resonance device with suppression of unwanted signals, magnetic resonance apparatus, computer program and electronically readable data carriers |
| KR101967240B1 (en) * | 2012-10-10 | 2019-04-09 | 삼성전자주식회사 | Magnetic resonance imaging (MRI) apparatus and method for obtaining MRI image by correcting motion of subject |
| JP2013075199A (en) * | 2013-01-28 | 2013-04-25 | Toshiba Corp | Magnetic resonance imaging apparatus |
| JP5902259B2 (en) * | 2014-08-13 | 2016-04-13 | 株式会社東芝 | Magnetic resonance imaging system |
| JP6685097B2 (en) * | 2015-08-24 | 2020-04-22 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | Magnetic resonance device |
| JP7115847B2 (en) | 2017-12-26 | 2022-08-09 | 富士フイルムヘルスケア株式会社 | Magnetic resonance imaging system |
| KR102092908B1 (en) * | 2019-01-15 | 2020-03-24 | 연세대학교 산학협력단 | Magnetic Resonance Imaging Apparatus for Correcting Respiratory Movement |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6434342A (en) * | 1987-07-30 | 1989-02-03 | Mitsubishi Electric Corp | Magnetic resonance imaging method |
| DE19607023A1 (en) * | 1996-02-24 | 1997-08-28 | Philips Patentverwaltung | MR procedure with reduced movement artifacts |
| JP4250251B2 (en) * | 1999-04-13 | 2009-04-08 | 株式会社日立メディコ | Magnetic resonance imaging system |
| JP4152138B2 (en) * | 2002-07-18 | 2008-09-17 | 株式会社日立メディコ | Magnetic resonance imaging system |
| CN100490738C (en) * | 2003-09-05 | 2009-05-27 | 株式会社日立医药 | Magnetic resonance imaging method and device |
| JP2005278919A (en) * | 2004-03-30 | 2005-10-13 | Hitachi Medical Corp | Magnetic resonance imaging apparatus |
| JP4807825B2 (en) * | 2005-07-25 | 2011-11-02 | 株式会社日立メディコ | Magnetic resonance imaging system |
| JP4639136B2 (en) * | 2005-10-19 | 2011-02-23 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | Magnetic resonance imaging system |
-
2006
- 2006-01-12 JP JP2006004919A patent/JP4789244B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103376434A (en) * | 2012-04-20 | 2013-10-30 | 西门子公司 | Method for the acquisition of a measurement data set of a respirating examination subject by means of magnetic resonance technology |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007185300A (en) | 2007-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4789244B2 (en) | Magnetic resonance imaging system | |
| JP5105848B2 (en) | Magnetic resonance imaging apparatus and imaging condition setting method in magnetic resonance imaging apparatus | |
| JP5236356B2 (en) | Nuclear magnetic resonance imaging system | |
| JP4639136B2 (en) | Magnetic resonance imaging system | |
| US9301706B2 (en) | Magnetic resonance imaging system for non-contrast MRA and magnetic resonance signal acquisition method employed by the same | |
| JP4634934B2 (en) | Magnetic resonance imaging system | |
| JP6008839B2 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| KR100646914B1 (en) | Magnetic resonance imaging device | |
| JP2009261904A (en) | Medical imaging apparatus | |
| JP5106697B2 (en) | Magnetic resonance imaging system | |
| JP5288745B2 (en) | Magnetic resonance imaging system | |
| WO2014168033A1 (en) | Magnetic resonance imaging apparatus | |
| JP2006320527A (en) | Magnetic resonance imaging system | |
| JP2008086343A (en) | Magnetic resonance imaging apparatus | |
| JP6602631B2 (en) | Magnetic resonance imaging equipment | |
| JP2007061545A (en) | Magnetic resonance imaging apparatus | |
| JPH10234695A (en) | Magnetic resonant imaging system | |
| US20140303482A1 (en) | Magnetic resonance imaging method for imaging components with short transverse relaxation times (t2) in a human or an animal heart | |
| JP4230875B2 (en) | Magnetic resonance imaging system | |
| JP4086544B2 (en) | Magnetic resonance imaging system | |
| JP2005144075A (en) | Magnetic resonance imaging system | |
| JP3911605B2 (en) | Magnetic resonance imaging system | |
| JP4454268B2 (en) | Magnetic resonance imaging system | |
| JP2015002834A (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| JP2005021488A (en) | Magnetic resonance imaging equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110426 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110511 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110613 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110714 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110715 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4789244 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |