JP4769490B2 - 光路長制御装置 - Google Patents
光路長制御装置 Download PDFInfo
- Publication number
- JP4769490B2 JP4769490B2 JP2005155314A JP2005155314A JP4769490B2 JP 4769490 B2 JP4769490 B2 JP 4769490B2 JP 2005155314 A JP2005155314 A JP 2005155314A JP 2005155314 A JP2005155314 A JP 2005155314A JP 4769490 B2 JP4769490 B2 JP 4769490B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- optical path
- path length
- length control
- changing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Description
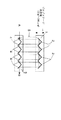
2・・・可動部に設置したミラー
3・・・固定部
4・・・固定部に設置したミラー
5・・・光路
6・・・光ファイバー
6’・・・光ファイバーの端面
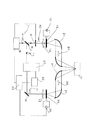
27・・・複数の光路を持つ遅延系
28・・・物体
Claims (8)
- 光の進行方向を変えるための2次元に配置された複数の部材を含み構成される固定部と、
光の進行方向を変えるための2次元に配置された複数の部材を含み構成され、且つ前記固定部との距離を変えるための駆動ステージから成る可動部と、を有し、
前記可動部と前記固定部は、光が、前記固定部の1つの部材から進行して前記可動部の対応する部材で折り返され前記固定部の前記1つの部材に隣接する部材に達し、該隣接する部材で折り返されて前記可動部の前記対応する部材に隣接する部材に達するということを順次繰り返すように、対向して設置されて、前記可動部と前記固定部の間に、連続する複数の折り返し光路を2次元に形成し、
前記駆動ステージを制御することにより、前記複数の折り返し光路を折り返しながら進む光に対して、前記距離と該光路の数との積から得る遅延時間を与えることを特徴とする光路長制御装置。 - 前記駆動ステージは、モーターあるいはピエゾ素子により構成されていることを特徴とする請求項1に記載の光路長制御装置。
- 前記光の進行方向を変えるための部材が、前記可動部と前記固定部よりも小さい複数のミラーあるいはプリズムによって形成されていることを特徴とする請求項1あるいは2に記載の光路長制御装置。
- 前記光の進行方向を変えるための部材が、U字形状あるいはJ字形状に曲げられた光ファイバーにより形成されていることを特徴とする請求項1あるいは2に記載の光路長制御装置。
- 前記光の進行方向を変えるための部材が、被覆のない光ファイバーの端面を研磨して金属でコーティングすることで形成された45°ミラーによって形成されていることを特徴とする請求項3に記載の光路長制御装置。
- 請求項1から5のいずれか1項に記載の光路長制御装置を含み構成される装置であって、
前記光が照射されることによりテラヘルツ波を発生あるいは検出することのできる光伝導素子を有し、
前記駆動ステージを制御することにより、前記光路を進む光が前記光伝導素子に到達するまでの遅延時間を変化させることを特徴とする装置。 - 請求項1から5のいずれか1項に記載の光路長制御装置を含み構成される装置であって、
前記光をビームスプリッタで2つに分割するためのビームスプリッタと、
前記ビームスプリッタが分割した前記光の一方が照射されることによりテラヘルツ波を発生させることのできる発生用光伝導素子と、
前記発生用光伝導素子から出て被検物を透過あるいは反射したテラヘルツ波を検出するための検出用光伝導素子と、を有し、
前記駆動ステージを制御することにより、前記ビームスプリッタが分割した前記光の他方が前記検出用光伝導素子に到達するまでの遅延時間を変化させることにより、前記透過あるいは反射したテラヘルツ波の時間波形を取得することを特徴とする装置。 - 前記時間波形を用いて、被検物の物性を検知あるいは位置や運動をセンシングすることを特徴とする請求項7に記載の装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005155314A JP4769490B2 (ja) | 2005-05-27 | 2005-05-27 | 光路長制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005155314A JP4769490B2 (ja) | 2005-05-27 | 2005-05-27 | 光路長制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006329857A JP2006329857A (ja) | 2006-12-07 |
| JP2006329857A5 JP2006329857A5 (ja) | 2008-07-31 |
| JP4769490B2 true JP4769490B2 (ja) | 2011-09-07 |
Family
ID=37551687
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005155314A Expired - Fee Related JP4769490B2 (ja) | 2005-05-27 | 2005-05-27 | 光路長制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4769490B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007327897A (ja) * | 2006-06-09 | 2007-12-20 | Tochigi Nikon Corp | テラヘルツ分光装置 |
| JP5037929B2 (ja) * | 2006-12-18 | 2012-10-03 | キヤノン株式会社 | テラヘルツ波を用いた対象物の情報取得装置及び方法 |
| JP2008209233A (ja) * | 2007-02-26 | 2008-09-11 | Naohiro Tanno | スペクトルドメインの光コヒーレンストモグラフィー装置 |
| JP5357531B2 (ja) * | 2008-02-05 | 2013-12-04 | キヤノン株式会社 | 情報取得装置及び情報取得方法 |
| JP5125858B2 (ja) * | 2008-08-01 | 2013-01-23 | ソニー株式会社 | 光学遅延装置 |
| JP2016017762A (ja) | 2014-07-04 | 2016-02-01 | 株式会社東芝 | 光学遅延装置及び光コヒーレンストモグラフィー装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5789750A (en) * | 1996-09-09 | 1998-08-04 | Lucent Technologies Inc. | Optical system employing terahertz radiation |
| JP4248665B2 (ja) * | 1999-03-25 | 2009-04-02 | 日本分光株式会社 | 赤外分光装置 |
| WO2000079248A1 (fr) * | 1999-06-21 | 2000-12-28 | Hamamatsu Photonics K.K. | Spectrometre a ondes terahertz |
| JP3896532B2 (ja) * | 1999-07-09 | 2007-03-22 | 独立行政法人科学技術振興機構 | テラヘルツ帯複素誘電率測定装置 |
| JP2003149139A (ja) * | 2001-11-07 | 2003-05-21 | Mitsubishi Electric Corp | 流動帯電電界評価装置 |
| JP2005069840A (ja) * | 2003-08-22 | 2005-03-17 | Japan Science & Technology Agency | 時系列変換パルス分光計測装置の時系列信号取得のための光路差補償機構 |
-
2005
- 2005-05-27 JP JP2005155314A patent/JP4769490B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006329857A (ja) | 2006-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5037929B2 (ja) | テラヘルツ波を用いた対象物の情報取得装置及び方法 | |
| JP4769490B2 (ja) | 光路長制御装置 | |
| US7777187B2 (en) | Apparatus and method for investigating a sample | |
| KR101709272B1 (ko) | 유도 광음향 분자진동 이미징 시스템 | |
| KR102372083B1 (ko) | 생체 센서 및 이를 포함하는 생체 분석 시스템 | |
| JP6387610B2 (ja) | 生体情報測定装置 | |
| US8405406B2 (en) | Detecting apparatus and imaging apparatus | |
| WO2016171042A1 (ja) | 分光測定装置 | |
| US20100007955A1 (en) | Large Amplitude High Frequency Optical Delay | |
| JP6538191B2 (ja) | 計測装置、計測方法及びコンピュータプログラム | |
| JP2018077427A (ja) | テラヘルツ光発生装置 | |
| JP2004527741A (ja) | 全反射分光法のための装置および方法 | |
| US20160077021A1 (en) | Imaging system | |
| JP2006329857A5 (ja) | ||
| JP2011085412A (ja) | テラヘルツ合焦方法、テラヘルツ合焦装置及びテラヘルツ合焦プログラム | |
| CN210294066U (zh) | 一种用于获得痕量质量和分子结构信息的高通量探测装置 | |
| JP2008089546A (ja) | 電磁波測定装置 | |
| US10983046B2 (en) | Enhanced optical data capture using NDIR for liquids | |
| WO2017138061A1 (ja) | 計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080527 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100902 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101026 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110614 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110620 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140624 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |