JP4765005B2 - 圧縮空気漏れ診断装置 - Google Patents
圧縮空気漏れ診断装置 Download PDFInfo
- Publication number
- JP4765005B2 JP4765005B2 JP2009180935A JP2009180935A JP4765005B2 JP 4765005 B2 JP4765005 B2 JP 4765005B2 JP 2009180935 A JP2009180935 A JP 2009180935A JP 2009180935 A JP2009180935 A JP 2009180935A JP 4765005 B2 JP4765005 B2 JP 4765005B2
- Authority
- JP
- Japan
- Prior art keywords
- compressed air
- leak
- location
- amount
- leakage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 claims description 63
- 238000005457 optimization Methods 0.000 claims description 50
- 238000004422 calculation algorithm Methods 0.000 claims description 22
- 244000126968 Kalanchoe pinnata Species 0.000 claims description 20
- 238000003745 diagnosis Methods 0.000 claims description 15
- 239000002245 particle Substances 0.000 claims description 10
- 230000002068 genetic effect Effects 0.000 claims description 9
- 239000000470 constituent Substances 0.000 claims 1
- 230000006870 function Effects 0.000 description 67
- 238000005259 measurement Methods 0.000 description 57
- 239000003795 chemical substances by application Substances 0.000 description 44
- 238000011156 evaluation Methods 0.000 description 28
- 238000004364 calculation method Methods 0.000 description 15
- 230000014509 gene expression Effects 0.000 description 13
- 230000001174 ascending effect Effects 0.000 description 9
- 239000000203 mixture Substances 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 7
- 241000196324 Embryophyta Species 0.000 description 6
- 238000009472 formulation Methods 0.000 description 6
- 244000144992 flock Species 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 239000000446 fuel Substances 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 108090000623 proteins and genes Proteins 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 230000035772 mutation Effects 0.000 description 3
- 239000013598 vector Substances 0.000 description 3
- 241000282412 Homo Species 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 241000251468 Actinopterygii Species 0.000 description 1
- 241000005308 Orsa Species 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 229910002056 binary alloy Inorganic materials 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000005574 cross-species transmission Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000004870 electrical engineering Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000010429 evolutionary process Effects 0.000 description 1
- 244000144980 herd Species 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000003012 network analysis Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P80/00—Climate change mitigation technologies for sector-wide applications
- Y02P80/10—Efficient use of energy, e.g. using compressed air or pressurized fluid as energy carrier
Landscapes
- Testing And Monitoring For Control Systems (AREA)
Description
また、特許文献2記載の従来技術は、負荷が必要とする圧縮空気の供給を確保しながらコンプレッサを効率的に運転することにより、空気供給システムの省エネルギー化を図るものである。
しかしながら、これらの従来技術には、圧縮空気プラントにおける空気漏れの事実は指摘されているものの、配管の繋ぎ目などにおける空気漏れ自体を検出する手段や方法については何ら開示されていない。
コンプレッサ等の圧縮空気の供給装置や圧縮空気の配管網、圧縮空気の消費装置等をネットワークの構成機器として備えた圧縮空気プラントでは、配管部において空気漏れが生じてしまうことが多く、供給空気の3割程度が漏れる例もある。このような空気漏れを考慮して圧縮空気を供給すると、エネルギーの面でも大きな損失となり、エネルギー問題及び省エネという観点からは大きな問題である。
前記構成機器の入出力関係をブランチとして表現する機器モデルを複数のノードにより接続し、前記ノードごとの入出力エネルギーが等しくなるように構成して前記ネットワークの入出力エネルギーを表現するネットワークモデルを備え、前記ネットワークの入出力エネルギーが与えられたときに、前記ノードごとの入出力エネルギーが等しくなる関係と前記機器モデルとに基づいて、前記ノード及び前記機器モデルにおけるある時間断面の空気流量や圧力を状態量として計算し、この状態量を前記ネットワークの状態量として出力する圧縮空気プラントシミュレータを備え、
オペレータにより入力された前記ネットワークにおける圧縮空気の漏れ場所候補を、圧縮空気の消費装置による消費として前記機器モデルにて表現して前記ネットワークモデルに組み込む機能と、
漏れ場所候補の漏れ場所数を1から予め定めた最大値まで変化させ、漏れ場所数ごとに漏れ場所候補を選択する全ての組み合わせを生成する機能と、
前記選択された漏れ場所候補の圧縮空気の漏れ量を状態変数として前記圧縮空気プラントシミュレータにより状態量を求め、前記ネットワークの入出力エネルギー及び前記ネットワークに設置された計測機器により測定された状態量を計測値とし、前記生成された漏れ場所候補を選択する全ての組み合わせについて、前記圧縮空気プラントシミュレータから出力される状態量と前記計測値とからなる所定の目的関数を用いて最適化問題を解くことにより、前記生成された漏れ場所候補を選択する全ての組み合わせにおける圧縮空気の漏れ量を計算する機能と、
前記生成された漏れ場所候補を選択する全ての組み合わせにおける各漏れ場所候補及び計算された圧縮空気の漏れ量を出力する機能と、を備えたものである。
請求項3に記載した発明は、請求項1において、圧縮空気の漏れ量を計算する機能を、タブサーチまたはその改良手法を用いて実現したものである。
請求項4に記載した発明は、請求項1において、圧縮空気の漏れ量を計算する機能を、パーティクル スウォーム オプティマイゼーション(Particle Swarm Optimization)
またはその改良手法を用いて実現したものである。
また、圧縮空気の漏れ場所候補を特定できることにより、空気漏れへの迅速な対応による大事故への波及防止、省エネルギー化、資源の有効利用が可能である。
1.まず、圧縮空気の漏れ場所候補とその場所における圧縮空気の漏れ量等を入力することによってプラントの状態量を出力可能とした圧縮空気プラントシミュレータについて説明する。このプラントシミュレータは、後述する圧縮空気漏れ診断装置と協働して圧縮空気の漏れ場所候補及びその場所における圧縮空気漏れ量の計算に使用されるものである。
圧縮空気プラントシミュレータは、圧縮空気の漏れ場所候補とその場所における漏れ量とが入力された時に、圧縮空気のネットワークを構成する後述の機器モデル及びネットワークモデルの圧縮空気フローに関する方程式を解くことにより、ある時間断面におけるネットワーク全体の定常状態を計算する。
このネットワークシミュレータは、コンピュータ水理学入門(C.A. ブレビア、A.J.フェラント著、磯部雅彦訳、サイエンス社、1983年)等に管路網解析技術として記述されている。
圧縮空気のフロー方程式は、線形または非線形連立方程式として定式化され、ニュートン法等を用いることにより、ある時間断面におけるネットワークの定常状態を解として得ることができる。
(1)機器モデル
コンプレッサ等の圧縮空気の供給装置、配管網、圧縮空気の消費装置等の、圧縮空気プラントを構成する機器モデルは、ブランチとして表現され、その入力と出力との関係を、以下の数式1のような関数により表現する。
[数1]
yi=f(xi)
ここで、xi:i番目の入力状態量
yi:i番目の出力状態量
f:入力状態量と出力状態量との関係を表す関数
機器の運用ルールも、上記関数fの中で表現される。なお、入力状態量は、ブランチに対する入力エネルギーから計算可能であり、出力状態量を用いてブランチから出力される出力エネルギーを計算可能である。また、関数fは圧縮空気の配管の抵抗分を含み、これによりエネルギー損失が生じるブランチも、数式1により表現する。
(2)ネットワークモデル
ブランチである機器モデルを多数ノードにより接続したものがネットワークモデルとなる。各ノードにおいては、入力エネルギーと出力エネルギーとがバランスしている以下の関数によって表現することができる。

なお、このようなネットワークモデルは、基本的には、電気工学におけるキルヒホッフの第1、第2法則の概念により表現が可能である。例えば、圧縮空気の場合、ノードへの流入圧縮空気量と、ノードからの流出圧縮空気量と、ノードにおける消費圧縮空気量との和は等しいということが利用可能である。
(3)圧縮空気の漏れ場所候補とその場所における漏れ量
圧縮空気の漏れは、圧縮空気プラントシミュレータにおける圧縮空気の消費機器と同様に考えられるため、仮想的な圧縮空気消費機器によってもたらされるものと考える。また、圧縮空気の漏れ場所候補については、配管の繋ぎ目のように、事前に本発明の診断装置に入力情報としてオペレータが入力するものとする。その場所の漏れ量については、以下のような最適化の定式化の中で、システムからの出力の一つとして計算される。
(4)圧縮空気プラントシミュレータ
ネットワークのシミュレーションは、前述の数式1,2からなる非線形連立方程式に対し、ネットワークに対する入力エネルギー及び出力エネルギーを指定して方程式を解くことによって得られる。
2.次に、圧縮空気漏れ診断装置を用いた圧縮空気漏れ診断方法について説明する。
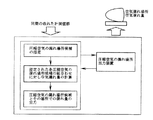
図1は、圧縮空気漏れ診断装置が有する機能の概要を示しており、圧縮空気の漏れ場所候補を指定する機能A1と、指定された漏れ場所候補の組合せに対して各漏れ場所の空気漏れ量を計算する機能A2と、最終的に圧縮空気の漏れ場所候補とその場所における漏れ量を決定して出力する機能A3とを有している。
以下、各機能について述べる。
(1)圧縮空気の漏れ場所候補の指定(A1)
圧縮空気の漏れ場所数は、確率的には少ない場合が高いと推定される。従って、入力された圧縮空気の漏れ場所候補の中から、以下のアルゴリズムにより圧縮空気の漏れ場所候補を所定数、指定する。ここで、漏れ場所数の最大指定数(nmax)は事前に決定する。・Step.1:n(漏れ場所数)=0とする。
・Step.2:n=n+1とする。
・Step.3:漏れ場所候補の中からn個を選び出す組合せを全て生成する。生成された組合せを全て格納する。
・Step.4:n=nmaxならばStep.5へ移り、そうでないならばStep.2へ戻る。
・Step.5:格納した漏れ場所の組合せを、次の機能A2へ出力する。
(2)指定された漏れ場所候補の組合せに対する空気漏れ量の計算(A2)
上記機能A1で指定された圧縮空気の各漏れ場所候補に対して、各場所における空気漏れ量は、以下のような最適化問題を解いて計算する。
(a)状態変数
状態変数としては、以下を考える。
・圧縮空気の漏れ場所候補における圧縮空気漏れ量
(b)計測値(計測変数)
以下の値が計測(測定)でき、本発明の診断装置に入力可能と仮定する。
・ネットワークの入力エネルギー:コンプレッサ等の圧縮空気供給装置への燃料入力、電気入力、または蒸気入力(連続値)
・ネットワークの出力エネルギー:圧縮空気消費機器の空気消費量
・ネットワークにおける限定されたノード及びブランチの状態量:ネットワークにおいて、計測機器が設置してあるノードの圧力値及びブランチの圧縮空気流量
(c)最適化問題としての定式化
以下に定式化を示す。以下に示す目的関数は、計測値と計測点における計算値のノルムの最小化とする。
0≦xj≦xj,max
なお、数式3,4において、
NumMea:計測値点数
x:状態変数(指定された漏れ場所の圧縮空気漏れ量)
wmi:i番目の計測変数の重み係数
zi:i番目の計測変数の計測値
hi:i番目の計測変数の状態方程式(プラントシミュレータにより計算)
p:ノルムの次数
xj,max:j番目の状態変数の最大値
である。
本機能A2では、指定された空気漏れ場所候補の組合せに対し、上記の最適化により求められた各空気漏れ場所の漏れ量と目的関数値とを格納する。それぞれの組合せに対し、格納するデータは以下のとおりとする。
・指定された空気漏れ場所候補
・各空気漏れ場所候補の漏れ量(最適化の結果得られた状態変数の値)
・最適化の結果得られた目的関数値
ここで、数式3における重み係数wmiの決定方法について述べる。
・計測センサの精度(SensorPRE)
・計測センサの故障率(SensorFAU)
ここで、計測センサの精度は、±5%等の%誤差範囲で表現される。また、故障率は、年間の故障回数(故障回数/年)で表現される。この値を用いて、各計測変数に対する重み係数wmiは、以下の数式5のように決定する。
[数5]
wmi=fw(SensorPREi,SensorFAUi), i=1,……,NumMea
SensorPREi:i番目の計測変数に対する計測センサの精度
SensorFAUi:i番目の計測変数に対する計測センサの故障率
例えば、重み係数wmiは以下のような式で表現可能である。
a:計測変数に対応するセンサ精度に対する重み
b:計測変数に対応するセンサ故障率に対する重み
であり、これらのa,bの値は事前に指定することとする。
(3)最終的な圧縮空気の漏れ場所候補とその場所での漏れ量を決定し出力する機能(A3)
本機能では、(2)の機能A2で得られた各組み合わせに対する格納データを用いて、以下のように最終的な圧縮空気の漏れ場所候補とその場所における漏れ量を決定する。
・Step.1:各組合せの目的関数値を用いて、各漏れ場所数について、目的関数値の小さいものから各組合せを順に並べ替える。
・Step.2:この並べ替えた結果の目的関数値の小さいものから順に、可能性の高い候補として以下を出力する。
・漏れ場所数
・候補の順位
・指定された空気漏れ場所候補
・指定された各空気漏れ場所候補の漏れ量
上記ステップにより、漏れ場所が1ヶ所の場合の可能性が高い候補順、2ヶ所の場合の可能性が高い候補順というように、順番に圧縮空気の漏れ場所候補とその場所での漏れ量を決定する。
・圧縮空気の漏れ場所候補が実際に漏れている場所であるか否かを示す2値量(漏れている場所である場合を1、漏れている場所でない場合を0とする)
・漏れ場所候補における圧縮空気漏れ量(連続量)
この場合、定式化に用いる目的関数は、以下の項目を考慮する。
・漏れ場所が存在する確率の最小化
・各計測点における計測値と計測点における計算値のノルムの最小化
従って、目的関数は以下の数式7のように記述できる。
[数7]
minf1(Pi,xi,yj)
ここで、Pi:i番目の漏れ場所候補で実際に空気漏れが発生する確率
xi:状態変数(i番目の場所が漏れ場所か否かの2値量)
yj:状態変数(漏れ場所と指定されたj番目の場所の圧縮空気漏れ量)
具体的には、例えば数式8、数式9のような目的関数を設定できる。
0≦yj≦yj,max
数式8,9において、
NumLea1:漏れていると指定された漏れ場所候補の数
NumLea2:漏れていないと指定された漏れ場所候補の数
w1:目的関数の各項に対する重み
yj,max:j番目の場所の漏れ量の最大値
である。
なお、重み係数wmiの決定方法は前記同様である。
数式8におけるh(x,y)は圧縮空気プラントシミュレータによって計算される。プラントシミュレータでは、状態変数のうち、圧縮空気の漏れ場所候補に対する2値数が1、つまり漏れていると指定された場所については、連続量の状態変数であるその場所での圧縮空気漏れ量を仮想的な負荷として、プラントの計算を実行する。
なお、圧縮空気の漏れ場所候補に対する2値数が0、つまり漏れていないと指定された場所については、その場所での負荷量が0として計算する。
・指定された空気漏れ場所候補
・各漏れ場所候補の漏れ量(最適化の結果得られた状態変数の値)
・最適化の結果得られた目的関数値
なお、図2は、上記最適化手法を用いて圧縮空気の漏れ場所及び漏れ量を特定する処理の概要を示すフローチャートである。
図示するように、初期解から徐々に解を変更して最適解へ至るような最適化手法を用いており、最良解が得られた度にその最良解を格納し、得られた最良解の集合を目的関数値が小さい順にソートし、最終的に出力する。
上述の方法により、以下の出力項目が決定される。
・候補の順位
・漏れ場所数
・漏れ場所
・各漏れ場所の漏れ量
上記ステップにより、目的関数が小さい、つまり、可能性が高く、かつ特定された場所で空気が漏れていると仮定すると、全ての計測値のつじつまが合うような場所とその漏れ量のうち、可能性が高い候補から順に出力されることになる。
3.次に、遺伝的アルゴリズムまたはその改良手法を用いた圧縮空気漏れ診断装置について述べる。
なお、数式8に示した目的関数を用いる場合は、離散量と連続量を扱っており、更に目的関数が非線形となることから、混合整数非線形最適化問題(Mixed-integer Nonlinear Optimization Problem (MINLP))となる。本実施形態では、このMINLP問題の解決方法も提案する。
(1)状態変数と遺伝子表現
状態変数としては、以下を考える。
・圧縮空気の漏れ場所候補(数式8の目的関数を用いる場合)
前述の如く、各漏れ場所候補について、空気漏れが発生しているか否かにより1または0の2値量で表現する。
・漏れ場所の漏れ量(数式3,数式8の目的関数を用いる場合)
この漏れ量は、0から数式4または9で事前に設定される漏れ量最大値までの値をとるが、この値を事前に設定する離散化のルールにより離散化する。この離散化のルールは、例えば、0から漏れ量最大値までを一定の値ΔxまたはΔyで離散するというようなルールである。このような離散化ルールによって得られる離散化された圧縮空気漏れ量を、以下のような方法により2進法または10進法で表現する。
(a)2進法による表現
0から漏れ量最大値までを一定値ΔxまたはΔyで離散化された数値に対し、小さい順番に番号着けを行い、この番号を2進法で表現する。以下の遺伝子操作上は、この番号を表現する2進数を利用し、目的関数値の評価等、圧縮空気漏れ量そのものが必要な場合は、2進数の番号に対応する圧縮空気漏れ量(実際には対応表を作成し、これを利用して求める)を利用して計算を行う。
(b)10進法による表現
0から漏れ量最大値までを一定値ΔxまたはΔyで離散化された数値に対し、小さい順番に番号着けを行い、この番号を10進法で表現する。以下の遺伝子操作上は、この番号を表現する10進数を利用し、目的関数値の評価等、圧縮空気漏れ量そのものが必要な場合は、10進数の番号に対応する圧縮空気漏れ量(実際には対応表を作成し、これを利用して求める)を利用して計算を行う。
図3は、漏れ場所候補及び各候補における漏れ量(10進法により表現)を遺伝子により表現した例を示す。
(2)計測値
以下の値が計測(測定)でき、本実施形態の診断装置に入力可能と仮定する。
・ネットワークの入力エネルギー
コンプレッサ等の圧縮空気供給装置への燃料入力、電気入力、または蒸気入力(連続値)
・ネットワークの出力エネルギー
圧縮空気消費機器の空気消費量
・ネットワークにおける限定されたノード及びブランチの状態量
ネットワークにおいて、計測機器が設置してあるノードの圧力値、及び、ブランチの圧縮空気流量
(3)アルゴリズム
以下に、SGAを利用した場合のアルゴリズムを示す。
Step.1:前提条件と初期条件設定
・各計測値を入力する。
・状態変数(圧縮空気漏れ量)の上限値を設定
0から上限値の間で、状態変数を2進法または10進法に変換する表を作成する。
・ストリング数、交差確率、突然変異確率、最大世代数を設定する。
Step.2:初期値の生成
・各ストリングの遺伝子座について、2進数の場合は0または1、10進数の場合は上限及び下限の間の範囲の可能な整数値の中からランダムに2進数または10進数値を生成する。
・現在の世代数を1とする。
・評価値の最良値(Obj*)を無限大とする。
Step.3:各ストリングの評価と選択
・各ストリングの遺伝子座の2進数または10進数と対応表を用いて圧縮空気漏れ量(及び漏れ場所)を決定する。
・ネットワークモデルに圧縮空気漏れ量(及び漏れ場所)を入力し、各計測点における計測値に対する計算値を求め、この値を用いて数式3または数式8により評価値を計算する。
・上記の評価値の逆数をFitness関数値として、ルーレット・ホイール・セレクションによりストリングの選択を行う。
・選択されたストリングの評価値のうち、最小値が現在のObj*より小さかったら、その評価値をObj*としてその値を格納する。また、その時の状態変数の値をX*として格納する。
Step.4:ストリング操作
・ストリング集合に対して、交差確率、突然変異確率を用いて、交差及び突然変異を実行する。
Step.5:終了判定
・世代が事前に決定した値に達したら、格納したすべてのObj*,X*についてのObj*の値が小さい順にソートし、すべてのObj*,X*を出力する。
・世代が事前に決定した値に達しない場合には、世代数を1足して、Step.3へ戻る。
4.次に、タブサーチまたはその改良手法を用いた圧縮空気漏れ診断装置について述べる。
(1)状態変数の表現方法
状態変数としては、以下を考える。
・圧縮空気の漏れ場所候補(数式8の目的関数を用いる場合)
前述の如く、各漏れ場所候補について、空気漏れが発生しているか否かにより1または0の2値量で表現する。
・漏れ場所の漏れ量(数式3,数式8の目的関数を用いる場合)
この漏れ量は、0から数式4または9で事前に設定される漏れ量最大値までの値をとるが、この値を事前に設定する離散化のルールにより離散化する。この離散化のルールは、例えば、0から漏れ量最大値までを一定の値ΔxまたはΔyで離散するというようなルールである。このような離散化ルールによって得られる離散化された圧縮空気漏れ量を、以下のような方法により10進法で表現する。
これにより、漏れ場所の候補数だけの10進数(及び2進数)を持つ配列を利用して状態変数は表現される。
(2)計測値
前記SGAにおいて説明したものと同様の計測値を、本実施形態の診断装置に入力可能と仮定する。
(3)アルゴリズム
以下に、TSを利用した場合のアルゴリズムを示す。
Step.1:前提条件と初期条件設定
・各計測値を入力する。
・状態変数(圧縮空気漏れ量)の上限値を設定
0から上限値の間で、状態変数を10進法に変換する対応表を作成する。
・タブー長及び最大探索回数を設定する。
Step.2:初期値の生成
・配列の各要素について、2進数の場合は0または1、10進数の場合は上限及び下限の間の範囲の可能な整数値の中からランダムに2進数または10進数値を生成し、これを現在状態とする。
・現在の探索回数を1とする。
・評価値の最良値(Obj*)を無限大とする。
Step.3:隣接状態の生成と次状態の決定
・各漏れ場所候補の漏れ量を示す状態変数については、現在状態の各配列インデックスに対して10進法の±1の値(上下限値の場合は、限界値を超える方向には値を生成しない)を隣接状態とする。
(1,3,4),(3,3,4),(2,2,4),(2,4,4),(2,3,3),(2,3,5)
そして、各隣接状態に対し、配列の値の10進数を対応表を用いて各場所の圧縮空気漏れ量に変換する。
また、各漏れ場所候補が漏れているか否かを示す1,0の2値量に関しては、各配列インデックスに対して数値を反転した値を隣接状態とする。例えば、3つの漏れ場所候補に対し現在状態が(1,0,0)であった場合、隣接状態は(0,0,0),(1,1,0),(1,0,1)となる。
・ネットワークモデルに圧縮空気漏れ量(及び漏れ場所)を入力し、各計測点における計測値に対する計算値を求め、この値を用いて数式3または数式8により評価値を計算する。
・各隣接状態の中でタブーでない最も評価が良いもの(評価値が小さい)を次状態とする。次状態の評価値が現在のObj*より小さかったら、その評価値をObj*として格納する。また、その時の状態変数の値をX*として格納する。
・現在の値を次状態とする。
Step.4:終了判定
・探索回数が事前に設定した最大探索回数に達したら、格納した全てのObj*,X*についてObj*の小さい順にソートし、全てのObj*,X*を出力する。
5.次に、Particle Swarm Optimizationまたはその改良手法を用いた圧縮空気漏れ診断
装置について述べる。
ここで、Particle Swarm Optimization(以下、PSO)或いはその改良手法とは、J. Kennedy and R. Eberhart、 Swarm Intelligence、 Morgan Kaufmann Publishers、 2001で解説されているように、Eberhart氏らにより開発された群れ理論を基にしたParticle Swarm OptimizationのGbestモデル、Lbestモデル、または、Angeline氏により開発されたHybrid Particle Swarm Optimization等のParticle Swarm Optimizationの様々なバリエーションを含む手法を指す。以下、例として前述した最適化をgbestモデル及びHybrid PSOにより実現する方法について述べる。
(1)gbestモデル
例えば、魚の群れや鳥の群れ等の自然界の生物の群れの動きは、簡単なルールで記述できることがわかってきている。つまり、個体(エージェント)の動きは簡単なルールで記述しても、群れの動きは複雑にすることができる。Reynoldsが開発したboid(Reynolds、 C.W. ,"Flocks, Herds, and Schools: A Distributed Behavioral Model, in Computer Graphics", Proceedings of SIGGRAPH '87, pp. 25-34, 1987.)は以下の3つの簡単なルールのみを利用している。
・隣接するエージェントから離れようとする方向へ進む。
・群れ全体の向かっている方向に進む。
・群れの中心に向かって進む。
つまり、群れの中の個々のエージェントの動きは、簡単なベクトルの合成で考えることができる。
以上のように、群れの個体が簡単なベクトルを用いて動いていること、及び人間の意志決定が自分の経験及び、他人の経験上良かった状況に関する情報を用いて行われているという2つの観点が、新しい最適化手法であるPSOの背景となっている。
(2)PSOの探索方法
PSOは、上述の観点を用いて以下のように開発された。各エージェントの位置(状態量)をXY座標で表現し、その速度をvx(X方向の速度)、vy(Y方向の速度)で表現する。この位置と速度情報から次時点の各エージェントの位置を更新することができる。この概念に基づき、鳥の群れ全体がなんらかの目的関数を最適化するような行動をとると考えると、以下のような最適化が考えられる。
[数10]
vi k+1=w×vi k+c1×rand()×(pbesti−si k)+c2×rand()×(gbesti−si k)
ここで、vi k:探索k回目におけるi番目のエージェントの速度
rand():0〜1の一様乱数
si k:i番目のエージェントの探索k回目における探索点
pbesti:i番目のエージェントのpbest
gbesti:i番目のエージェントのgbest
w:エージェント速度に対する重み係数
c1,c2:各項に対する重み係数
つまり、最適化を実現する複雑な探索の方向は、Boydと同様にベクトルの合成で表現できる。また、数式10の右辺第2項は、pbestに収束する方向となっており、第3項は同様に、gbestに収束する方向となっている。つまり、この探索方向は、個人の経験と他人の経験を融合した方向となっている。また、数式10による探索方向の算出により、PSOはこれまでの速度を維持しようとする大域探索(数式10の右辺第1項)とpbest,gbestを用いてそれに近付こうとする局所探索(数式10の右辺第2,3項)とをバランスよく行う機構をもった探索手法である。
上記に示した探索点の修正(変更)の概念を、図4に示す。
[数11]
si k+1=si k+vi k+1
PSOはGA等と同様に複数の探索点を持った多点探索であり、各探索点のpbestと集団のgbestを用いて各探索点を確率的に変更していくことにより、大域最適解(最良解)を得る方法である。また、PSOは各ステップで目的関数値を評価する必要があるが、評価の回数は問題の規模によらずエージェント数のみで良いというメリットがある。従って、容易に大規模問題への適用が可能である。
図5は、多次元空間におけるPSOによる解探索の概念を示しており、n次元の問題に対しm個のエージェントにより解を探索する例である。
(3)PSOのパラメータ
PSOにおいて重要なパラメータは、試行回数、エージェント数、反復回数、数式10における各重み係数である。これらは全て設定値として変更可能とする。
・試行回数
PSOは確率的な最適化手法であるため、通常1回の最適化のみでなく乱数の種(seed)を変更して複数回の最適化を行い、その結果の中から最も良い解を最適解とする。その最適化を実行する回数を試行回数とする。
・エージェント数と反復回数
エージェント数は何点の同時探索を行うかの数値である。反復回数は、各探索点(エージェント)が何回位置を更新して探索を行うかの数値である。つまり、PSOのアルゴリズムでは、各エージェントの目的関数値は反復回数分評価される。
・重み係数(数式10のw,c1,c2)
wは、数式12の関数により表現できる。
[数12]
wk=h(k,kmax)
ここで、kmax:最大反復回数、k:現在の反復回数
例えば、経験的に以下のように設定すると良いことが分かっている。
[数13]
wk=wmax−k(wmax−wmin)/kmax
wmax=0.9,wmin=0.4
[数14]
c1=c2=2.0
数式13によって決定される重み係数wは、図6に示すように探索が進む(反復回数kが増える)に従って小さくなることがわかる。これは、重み係数wのかかる項は上述のように大域探索に相当する項であり、探索の開始時点では大域探索への比重を比較的大きくしておき、探索が進むに従ってその比重を小さくする。つまり、局所探索の比重を大きくするような特性となっていることがわかる。
(4)PSOによる最適化アルゴリズム
一回の最適化試行におけるアルゴリズムの概略を、図7に示す。
6.次に、gbestモデルを用いた圧縮空気漏れ量の出力方法を説明する。
(1)状態変数の表現方法
状態変数としては、以下を考える。
・圧縮空気の漏れ場所候補(数式8の目的関数を用いる場合)
前述の如く、各漏れ場所候補について、空気漏れが発生しているか否かにより1または0の2値量で表現する。
・漏れ場所の漏れ量(数式3,数式8の目的関数を用いる場合)
この漏れ量は、連続量で表現する。PSOでは、状態変数を連続量として表現可能であり、対象とする漏れ場所数だけの要素をもつ配列を用意し、この配列の1つ1つの要素が、圧縮空気の漏れ量となる。
(2)計測値
前記SGA,TSにおいて説明したものと同様の計測値を、本実施形態の診断装置に入力可能と仮定する。
(3)求解アルゴリズム
以下に、gbestモデルを用いたPSOを利用した場合のアルゴリズムを示す。
Step.1:前提条件と初期条件設定
・各計測値を入力する。
・状態変数(各漏れ場所候補の空気漏れ量)の上限値を設定する。
・エージェント数、各最適化パラメータ値、最大探索回数を設定する。
Step.2:初期値の生成
・各エージェント毎に、状態変数値を0または1,あるいは設定した上下限値内でランダムに生成する。
・pbest及びgbestの初期設定
各エージェント毎のpbest値及びgbest値を事前に設定した大きな値とする。
・現在の探索回数を1とする。
Step.3:各エージェントの評価
・各エージェント毎の評価値の計算
現在の各状態変数(空気漏れ量(及び、漏れ場所で漏れているか否かを示す1,0の2値量))をプラントシミュレータに入力し、各計測値に対する計算値を求め、この値を用いて数式3または数式8により評価値を計算する。
・pbest及びgbestの更新
上記で計算した各エージェント毎の評価値が現在の各エージェント毎のpbest値より良かったら、現在の値をpbest値に変更する。
Step.4:各エージェントの探索点の修正
設定した上下限値内で、各エージェント毎の状態変数値を数式10,11を用いて修正する。
Step.5:終了判定
探索回数が事前に設定した最大探索回数に達したら終了する。格納した全てのgbestの評価値及びその状態変数値X*をgbestが小さい順にソートし、全てのgbest値及びその状態変数値X*を出力する。この状態変数値が、求める圧縮空気漏れ量(及び漏れ場所)となる。
最大探索回数に達しなければ、現在の探索回数に1を足して、Step.3へ戻る。
7.次いで、Hybrid PSO(HPSO)を用いた圧縮空気漏れ診断装置について述べる。
(1)HPSOはPSOのメカニズムとGA等で利用される自然淘汰の概念を組み合わせたハイブリッド手法である(P. Angeline, "Using Selection to Improve Particle Swarm Optimization", Proc. of IEEE International Conference on Evolutionary Computation (ICEC), Anchorage, May 1998.)。
これに対し、HPSOは、通常のMH手法と同様に有効な点は利用するが、その点への依存が徐々に薄らいでいくような機能を実現している。具体的には、現状の探索点の評価値を良い順番に並べ、事前に設定した割合分だけ、現状の探索点に対し評価値の最も悪いエージェントの探索点と速度から順番に、評価値の最も良いエージェントの値にリプレイスする。この際、各エージェントのこれまで探索してきた最も評価が良い探索点(pbest)の情報は残す。このような方法により、有効な領域への探索の集中とこれまで探索してきた有効な領域への探索の方向の向け直し及びその方向への弱い依存関係という機能を実現できる。
HPSOの一般的なアルゴリズムは図8のようになる。このアルゴリズムにより、HPSOはPSOとMH手法の選択のダイナミクスの混合となる。HPSOと従来のPSOのメカニズムとしての差は少ないが、この選択手法を加えることによって、評価の高い領域を集中的に探索するメカニズムが追加され、より良い解を見つける事ができる探索メカニズムとなる。
(2)次に、HPSOを用いた圧縮空気漏れ量の出力方法を述べる。
Step.1:前提条件と初期条件設定
Step.2:初期値の生成
Step.3:各エージェントの評価
上記のStep.1〜Step.3の内容は、PSOを利用した場合と同様である。
Step.4:選択の実行
・現在の各エージェントの評価値を良い順番にソーティングする。
・事前に設定した割合(Sr)を用いて変更する個体数(Ns)を以下の式により計算する。
[数15]
Ns = Round(AgentNum×Sr)
・最も評価の悪いエージェントからNs個だけの探索点及び速度を、最も評価の良いエージェントからNs個だけの探索点及び速度と変更する。
この際、変更したエージェントのpbest情報はそのままとする。
Step.5:各エージェントの探索点の修正
設定した上下限値内で、各エージェント毎の状態変数値を数式10,数式11を用いて修正する。
Step.6:終了判定
探索回数が事前に設定した最大探索回数に達したら終了する。格納した全てのgbestの評価値及びその状態変数値X*をgbestが小さい順にソートし、全てのgbest値及びその状態変数値X*を出力する。この状態変数値が、求める圧縮空気漏れ量(及び漏れ場所)となる。
8.次に、同時性を確保した計測値が入力され、前述した最適化手法のいずれかを用いて圧縮空気の漏れ場所候補を特定すると共に、その場所における漏れ量を画面に表示出力する圧縮空気漏れ診断装置を図9、図10に示す。
なお、図9に示す診断装置は請求項1〜4の発明を実施するためのものであり、図10に示す診断装置は、参考例を実施するためのものである。
これらの装置には、ネットワーク内に設置された各計測器から同期のとれた計測値が入力される。この同期の取り方には、例えばGPS等を利用し、事前に決定した周期(例えば10分単位)で計測値と同時に時間タグを付けた計測データを装置に入力し、装置側でもGPSに合わせた計測時間を持ち、各計測機器に対する計測データのうち、この装置側の計測時間に一番近いデータをその時点での計測点とする方法が考えられる。また、この方法はGPSを用いるのではなく、各計測器をネットワークで接続し、NTPサーバ等により、絶対時間の同期を取り、この絶対的な計測時間の時間タグと計測値とを装置に入力し、同じ計測時間の計測値を同期した計測データとして扱う方法も考えられる。
診断装置により、圧縮空気の漏れ場所とその場所での空気漏れ量との組合せが可能性の高い候補として出力される。この候補のうち、評価値が低い(可能性の高い)組合せから順番に表形式で画面に出力する。
図11は、この実施例が適用される圧縮空気の供給システムを示しており、10はコンプレッサ、21〜23は空気負荷、m1〜m5は計測点(5箇所)、c1〜c5は空気漏れ場所候補である。なお、図11では簡単化のため、エアタンクは省略してある。また、空気漏れ場所候補は、例えば配管、管継手、機器の接続部等が考えられる。(1)機器モデル
・コンプレッサ
コンプレッサは、燃料(電気等)を入力することにより、圧縮空気を出力するモデルとなっており、下記の数式で表されるものとする。
[数16]
y1=f1(x1)
ここで、x1:コンプレッサへの燃料(電気等)入力量
y1:コンプレッサの圧縮空気出力量
例として、ここでは下記のように線形式で表現されているとする。
[数17]
y1=a1x1+b1
ここで、a1,b1:機器特性パラメータ
・圧縮空気合計出力
圧縮空気合計出力は、数式18に示すようにすべてのコンプレッサで発生した圧縮空気出力合計値となる。ここでは、1台のコンプレッサを仮定しているが、複数台ある場合は、複数台のコンプレッサからの圧縮空気出力合計値となる。
[数18]
y2=f2(y1)=y1
ここで、y2:圧縮空気出力合計値
(2)その他の計算条件
計測値mimeasをそれぞれ、m1meas、m2meas、m3meas、m4meas、m5measとする。ここで、mimeasはi番目の計測値を意味する。
(3)計算の実行
圧縮空気の漏れ場所とその漏れ量の計算
請求項1〜4または参考例により、図11に示す圧縮空気の供給システムにおいて最も確からしい圧縮空気の漏れ場所とその漏れ量を計算することが可能である。a.計測点における計算値の計算方法
それぞれの計算値は以下の数式19〜23のようになる。
[数19]
m1calc=x1
[数20]
m2calc=y1
[数21]
m3calc=y2
[数22]
m4calc=y3
[数23]
m5calc=y4
ここで、m1calc:計測点1の計算値
m2calc:計測点2の計算値
m3calc:計測点3の計算値
m4calc:計測点4の計算値
m5calc:計測点5の計算値
b.最適化手法を用いた圧縮空気の漏れ場所及び漏れ量の特定方法
まず、請求項1〜4の発明を用いる場合、図1の機能A1によって圧縮空気の漏れ場所候補を指定する。
(0,0,0),(0,0,1) ,(0,1,0) ,(0,1,1),(1,0,0),(1,0,1) ,(1,1,0) ,(1,1,1)
例えば、(1,0,0)はc1だけが漏れ場所であることを示している。
次に、指定された各圧縮空気の漏れ場所の組合せに対する空気漏れ量の計算を最適化を用いて行う。ここで、組合せ(1,0,0)に対する空気漏れ量の計算を例にとって説明する。
機器の上下限制約等の機器制約も考慮した最適化の定式化は以下のようになる。
・状態変数
状態変数は、指定された空気漏れ場所の空気漏れ量となる。この漏れ量は上述のように、仮想的な空気負荷となる。
・目的関数
目的関数は、数式24に示すごとく、計測点における計測値と計算値とのノルムの最小化となる。
・制約条件
コンプレッサの圧縮空気出力制約として、数式25で与えられる。
[数25]
0≦y1≦Aircom,airmax
ここで、Aircom,airmaxはコンプレッサの圧縮空気出力最大値である。
つまり、数式25の制約を満たす範囲で数式24の目的関数を最小化する状態変数を求めることになる。その際、各計測値に対する計算値は、数式16〜23のネットワークに関する方程式から計算される。
圧縮空気の漏れ場所の組合せは、(1,0,0)以外についても、数式24の目的関数を最小化する状態変数値を求め、漏れ場所が同一であるものについて、目的関数値の小さい順番に、例えば図12のような形式で画面に表示出力する。また、漏れ場所の数が少ない方から順に表示するものとする。
次に、参考例の、圧縮空気の漏れ場所及び漏れ量の特定方法を説明する。
機器の上下限制約等の機器制約も考慮した最適化の定式化は、以下のようになる。
・状態変数
状態変数は、各空気漏れ場所候補に実際に空気漏れが発生しているか否かを示す1,0の2値量と、各空気漏れ場所の空気漏れ量(連続量)となる。この漏れ量は、上述のように仮想的な空気負荷となる。
・目的関数
目的関数は、計測点における計測値と計算値とのノルムの最小化となり、例えば前述の数式8から、以下の数式26のようになる。
前記数式25と同様である。
すなわち、数式25の制約を満たす範囲で数式26の目的関数を最小化する状態変数を求めることになる。その際、各計測値に対する計算値は、数式16〜23のネットワークに関する方程式から計算される。
そして、最終的に得られた解を利用して、診断装置は、漏れ場所が少なく目的関数値の小さい順番に、図12のように画面に表示出力する。
21〜23:空気負荷
m1〜m5:計測点
c1〜c5:空気漏れ場所候補
Claims (4)
- 圧縮空気の供給装置、圧縮空気の配管網及び圧縮空気の消費装置をネットワークの構成機器として備えた圧縮空気プラントにおける圧縮空気プラントシミュレータを用いた圧縮空気漏れ診断装置において、
前記構成機器の入出力関係をブランチとして表現する機器モデルを複数のノードにより接続し、前記ノードごとの入出力エネルギーが等しくなるように構成して前記ネットワークの入出力エネルギーを表現するネットワークモデルを備え、前記ネットワークの入出力エネルギーが与えられたときに、前記ノードごとの入出力エネルギーが等しくなる関係と前記機器モデルとに基づいて、前記ノード及び前記機器モデルにおけるある時間断面の空気流量や圧力を状態量として計算し、この状態量を前記ネットワークの状態量として出力する圧縮空気プラントシミュレータを備え、
オペレータにより入力された前記ネットワークにおける圧縮空気の漏れ場所候補を、圧縮空気の消費装置による消費として前記機器モデルにて表現して前記ネットワークモデルに組み込む機能と、
漏れ場所候補の漏れ場所数を1から予め定めた最大値まで変化させ、漏れ場所数ごとに漏れ場所候補を選択する全ての組み合わせを生成する機能と、
前記選択された漏れ場所候補の圧縮空気の漏れ量を状態変数として前記圧縮空気プラントシミュレータにより状態量を求め、前記ネットワークの入出力エネルギー及び前記ネットワークに設置された計測機器により測定された状態量を計測値とし、前記生成された漏れ場所候補を選択する全ての組み合わせについて、前記圧縮空気プラントシミュレータから出力される状態量と前記計測値とからなる所定の目的関数を用いて最適化問題を解くことにより、前記生成された漏れ場所候補を選択する全ての組み合わせにおける圧縮空気の漏れ量を計算する機能と、
前記生成された漏れ場所候補を選択する全ての組み合わせにおける各漏れ場所候補及び計算された圧縮空気の漏れ量を出力する機能と、
を備えたことを特徴とする圧縮空気漏れ診断装置。 - 請求項1に記載した圧縮空気漏れ診断装置において、
圧縮空気の漏れ場所候補及びその場所における圧縮空気の漏れ量を計算する機能を、遺伝的アルゴリズムまたはその改良手法を用いて実現したことを特徴とする圧縮空気漏れ診断装置。 - 請求項1に記載した圧縮空気漏れ診断装置において、
圧縮空気の漏れ場所候補及びその場所における圧縮空気の漏れ量を計算する機能を、タブサーチまたはその改良手法を用いて実現したことを特徴とする圧縮空気漏れ診断装置。 - 請求項1に記載した圧縮空気漏れ診断装置において、
圧縮空気の漏れ場所候補及びその場所における圧縮空気の漏れ量を計算する機能を、パーティクル スウォーム オプティマイゼーション(Particle Swarm Optimization)またはその改良手法を用いて実現したことを特徴とする圧縮空気漏れ診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009180935A JP4765005B2 (ja) | 2009-08-03 | 2009-08-03 | 圧縮空気漏れ診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009180935A JP4765005B2 (ja) | 2009-08-03 | 2009-08-03 | 圧縮空気漏れ診断装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004157057A Division JP2005339195A (ja) | 2004-05-27 | 2004-05-27 | 圧縮空気プラントシミュレータ及び圧縮空気漏れ診断装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010276511A Division JP4911244B2 (ja) | 2010-12-13 | 2010-12-13 | 圧縮空気漏れ診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009259279A JP2009259279A (ja) | 2009-11-05 |
| JP4765005B2 true JP4765005B2 (ja) | 2011-09-07 |
Family
ID=41386532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009180935A Expired - Lifetime JP4765005B2 (ja) | 2009-08-03 | 2009-08-03 | 圧縮空気漏れ診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4765005B2 (ja) |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07103960B2 (ja) * | 1991-04-06 | 1995-11-08 | 石油資源開発株式会社 | パイプライン漏洩検出方法 |
| JPH09217900A (ja) * | 1995-12-06 | 1997-08-19 | Hitachi Ltd | 流体輸送管網制御システム及び方法 |
-
2009
- 2009-08-03 JP JP2009180935A patent/JP4765005B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009259279A (ja) | 2009-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Wang et al. | Stochastic combined heat and power dispatch based on multi-objective particle swarm optimization | |
| Haghighi et al. | Uncertainty analysis of water supply networks using the fuzzy set theory and NSGA-II | |
| CN101203871A (zh) | 管道优化器系统 | |
| Zhu et al. | Condition-based maintenance for multi-component systems: Modeling, structural properties, and algorithms | |
| Neves-Moreira et al. | Service operation vessels for offshore wind farm maintenance: Optimal stock levels | |
| CN108805346A (zh) | 一种基于多隐层极限学习机的热连轧轧制力预报方法 | |
| JP4337461B2 (ja) | 機器特性パラメータ推定装置及び機器特性パラメータ情報出力装置 | |
| JP2006209331A (ja) | ネットワーク上の機器診断装置及び計測器診断装置 | |
| Hu et al. | A new quantitative digital twin maturity model for high-end equipment | |
| Son et al. | Optimization time-cost-quality-work continuity in construction management using mutation–crossover slime mold algorithm | |
| JP4911244B2 (ja) | 圧縮空気漏れ診断装置 | |
| Shrestha et al. | Enhancing seismic vulnerability assessment: a neural network effort for efficient prediction of multi-storey reinforced concrete building displacement | |
| Azad et al. | A standard benchmarking suite for structural optimization algorithms: ISCSO 2016–2022 | |
| JP4765005B2 (ja) | 圧縮空気漏れ診断装置 | |
| Tian et al. | Multi-objective disassembly line design and optimisation considering energy efficiency and human factors | |
| JP2005339195A (ja) | 圧縮空気プラントシミュレータ及び圧縮空気漏れ診断装置 | |
| Kotecha et al. | Design of robust, reliable sensor networks using constraint programming | |
| De Kuyffer et al. | Offshore windmill and substation maintenance planning with distance, fuel consumption and tardiness optimisation | |
| Zhu et al. | Improved fruit-fly optimization algorithm for force-finding of cable dome structures | |
| Vahldiek et al. | Optimal sensor placement for pressure wave detection for leakage localization in a district heating network | |
| Wang et al. | Machine learning-driven high-fidelity ensemble surrogate modeling of Francis turbine unit based on data-model interactive simulation | |
| JP2004258816A (ja) | 設備投資リスク評価方法とシステム、およびそのためのプログラム | |
| Quang et al. | Parting curve selection and evaluation using an extension of fuzzy MCDM approach | |
| Wu et al. | Gradient pyramid mechanism and Nelder-Mead simplex enhanced Colony Predation Algorithm for optimal power flow problems | |
| Zhong et al. | Acceptable if building electricity price trend change to some biology trends |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090804 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101028 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110412 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20110422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110425 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4765005 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140624 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |