JP4602527B2 - Fruit and vegetable automatic sorting device - Google Patents
Fruit and vegetable automatic sorting device Download PDFInfo
- Publication number
- JP4602527B2 JP4602527B2 JP2000291024A JP2000291024A JP4602527B2 JP 4602527 B2 JP4602527 B2 JP 4602527B2 JP 2000291024 A JP2000291024 A JP 2000291024A JP 2000291024 A JP2000291024 A JP 2000291024A JP 4602527 B2 JP4602527 B2 JP 4602527B2
- Authority
- JP
- Japan
- Prior art keywords
- fruit
- transport
- vegetable
- vegetables
- transport body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images











Landscapes
- Branching, Merging, And Special Transfer Between Conveyors (AREA)
- Sorting Of Articles (AREA)
Description
【0001】
【発明の属する技術分野】
本発明は胡瓜、茄子等の果菜をサイズ別、形状別といった規格別(等級別)に自動的に選別する果菜自動選別装置に関するものである。
【0002】
【従来の技術】
胡瓜、茄子等の果菜をサイズ別、形状別といった等級別に選別する果菜自動選別装置として、従来は、本件発明者が先に開発した実用新案登録第1805988号のものがある。この果菜自動選別機は図12に示すように、複数本のベルトコンベアAを横一列に並べて配置し、ベルトコンベアAの先端位置を段階的に異ならせ、各ベルトコンベアAの先端部にターンテーブルBを配置したものである。
【0003】
図12に示す果菜自動選別機では、ベルトコンベアAの始端部側方に立った作業者Cが胡瓜Dを等級別に選別しながら各サイズ用のベルトコンベアAに載せ、ベルトコンベアAで搬送される胡瓜DをベルトコンベアAの側方に立った作業員Eが拾い上げてサイズ別に箱詰めすることができる。箱詰めが間に合わず、取り残された胡瓜DはターンテーブルBの上に送り出されて、ターンテーブルBの上に送り出される胡瓜Dが重ならないようにしてある。
【0004】
【発明が解決しようとする課題】
図12の果菜自動選別機は胡瓜の表面に傷が付きにくく、表面のイボが欠落しにくく、少ない人手で効率よく選別及び箱詰めができるという利点があるが、強いて言えばベルトコンベアの左端の選果人が胡瓜を等級別に選別しながら各サイズ用のベルトコンベアに振り分けて載せなければならないという面倒がある。
【0005】
【課題を解決するための手段】
本発明の目的は搬送中に果菜を等級別に自動的に選別可能であり、果菜を損傷することがなく搬送でき、一台の選別機でサイズや径の異なる果菜、例えば瓜と茄子を選別することができ、更には、一人の作業員で上下二段の搬送体で搬送されてくる果菜を取り出して箱詰めしたり袋詰めしたりすることができる果菜自動選別装置を提供することにある。
【0006】
本件出願の第1の果菜自動選別装置は、果菜を果菜受体に載せて搬送し、搬送中に果菜をサイズ、形状といった等級別に判別し、果菜を等級別に選別する果菜自動選別装置において、搬送体の搬送方向に配置されて搬送体により搬送される二以上の果菜受体と、搬送体により搬送される二以上の果菜受体を搬送体の搬送方向横方向に移動させて等級別に振分ける振分け機と、搬送される果菜受体よりも上方に配置されて、前記判別済みの特定等級の果菜を果菜受体上から取出す上段取出機と、他の等級の果菜を果菜受体上から取出す下段取出機と、前記上段取出機で取出された果菜を引継いで搬送する上段搬送体と、前記下段取出機で取出された果菜を引継いで搬送する下段搬送体を備え、前記上段搬送体は前記下段搬送体よりも上方に配置され、前記上段搬送体は上段取出機の先方に、下段搬送体は下段取出機の先方に夫々配置され、上段取出機及び上段搬送体が前記果菜受体の横移動最大幅内に配置されたものである。
【0007】
本件出願の第2の果菜自動選別装置は、果菜を果菜受体に載せて搬送し、搬送中に果菜をサイズ、形状といった等級別に判別し、果菜を等級別に選別する果菜自動選別装置において、搬送体の搬送方向に配置されて搬送体により搬送される二以上の果菜受体と、搬送体により搬送される二以上の果菜受体を搬送体の搬送方向横方向に移動させて等級別に振分ける振分け機と、搬送される果菜受体よりも上方に配置されて、前記判別済みの特定等級の果菜を果菜受体上から取出す上段取出機と、他の等級の果菜を果菜受体上から取出す下段取出機と、前記上段取出機で取出された果菜を引継いで搬送する上段搬送体と、前記下段取出機で取出された果菜を引継いで搬送する下段搬送体を備え、前記上段搬送体は前記下段搬送体よりも上方に配置され、前記上段搬送体は上段取出機の先方に、下段搬送体は下段取出機の先方に夫々配置され、上段搬送体又は下段搬送体はそれらの幅方向に二列以上配置され、二列以上の上段搬送体又は/及び下段搬送体の先端位置は、前記幅方向手前側のものが奥側のものよりも搬送方向手前側になるように搬送方向に段階的に異ならせて、前記手前側の上段搬送体又は/及び下段搬送体の先端部の先方に作業スペースを確保したものである。
【0008】
本件出願の第3の果菜自動選別装置は、請求項1記載の果菜自動選別装置において、上段搬送体と下段搬送体の双方又は一方はそれらの幅方向に二列以上配置され、二列以上の上段搬送体又は/及び下段搬送体の先端位置は、前記幅方向手前側のものが奥側のものよりも搬送方向手前側になるように搬送方向に段階的に異ならせて、前記手前側の上段搬送体又は/及び下段搬送体の先端部の先方に作業スペースを確保したものである。
【0009】
本件出願の第4の果菜自動選別装置は、前記果菜自動選別装置において、下段搬送体の走行速度を下段取出機の搬送速度よりも遅くして、下段取出機から間隔を開けて送り出される果菜が、間隔をつめて下段搬送体で搬送されるようにしたものである。
【0010】
本件出願の第5の果菜自動選別装置は、前記果菜自動選別装置において、下段取出機及び上段取出機は、対向する上コンベアと下コンベア間に果菜を挟んで搬送可能なものである。
【0011】
本件出願の第6果菜自動選別装置は、前記果菜自動選別装置において、果菜受体は上段取出機又は下段取出機が通過することのできる空間部を備えており、空間部は上段取出機又は下段取出機が通過できる幅と深さであり、且つ搬送方向に開通されたものである。
【0012】
本件出願の第7果菜自動選別装置は、前記果菜自動選別装置において、搬送体は多数本のバーが搬送方向に間隔をあけて配置連結された無端状であり、各果菜受体はそれらバーにその長手方向にスライド可能に取り付けられ、搬送体による搬送中に等級別にバーの長手方向にスライドされて振分けられるものである。
【0013】
【発明の実施の形態】
(実施形態1)
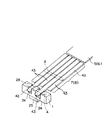
本発明の果菜自動選別装置の第の実施形態を、胡瓜を選別する場合を例にして以下に説明する。この果菜自動選別装置は果菜受体1(図6)を図9の様に搬送体2により搬送することによって、図1の様に果菜受体1の上に載せた果菜Aを搬送し、搬送中に等級判別器15(図1)により果菜Aを等級別に判別し、その後に振分け機4(図7)により果菜受体1の進路を等級別に振り分け、振り分けられた果菜Aを図1の下段取出機7と上段取出機8により取り出して、夫々から図1の下段搬送体5、上段搬送体6の夫々に送り出し、上下の搬送体5、6により搬送される果菜Aを、夫々の搬送体5、6の先方で作業者が手作業により取り出して作業台H(図4)の上に載せた包装箱G(図2)に箱詰めしたり、袋詰めしたり、或は図示されていない自動包装機により包装したりすることができるようにしてある。
【0014】
(搬送体の説明)
前記搬送体2は図5に示す様に、フレーム17の内側に間隔をあけて配置された二本のドライブチェーン16と、それに取り付けられたバー3とから構成される。ドライブチェーン16は図4の様にフレーム17の始端部18と後端部19の幅方向両端寄りに取り付けられたスプロケットギアのような駆動回転体20と、従動ギアのような従動回転体21の外周に掛けて、駆動回転体20の回転によりフレーム17の内側を周回する無端状にしてあり、水平部分で毎分21m程度の速度で走行できるようにしてある。図5の二つの駆動回転体20は回転軸Kにより連結されて同軸回転し、二つの従動回転体21は回転軸Lにより連結されて同軸回転する。
【0015】
前記バー3は金属製の中空バーであり、それを図7の様に二本一組として二本のドライブチェーン16(図5)間に一定間隔で多数組取り付けて、駆動回転体20の回動によりドライブチェーン16が走行して周回すると、バー3も周回するようにしてある。バー3は果菜受体1を横に複数個並べることができる長さとしてある。二本一組のバー3は両バー3の間隔を5cm、各組間のバー3の間隔を10cmとして、幅9.5cmの果菜受体1を搬送方向に1cm間隔で取り付け可能としてある。バー3はドライブチェーン16の連結ピン(チェーンを構成する各コマ同士を連結するピン)と同軸としてドライブチェーン16に取り付けて、ドライブチェーン16がフレーム17の始端部18や後端部19でカーブしても隣接するバー3間の間隔は水平部分と同一のままになる(変わらない)ようにしてある。
【0016】
ドライブチェーン16の数は一本でも三本以上でもよく、その設置位置もフレーム17の幅方向両端寄りではなく、他の位置であってもよい。例えばフレーム17の幅方向中央に一本のドライブチェーン16を配置し、ドライブチェーン16の夫々のコマに係止部を突設し、ドライブチェーン16が回動すると夫々の係止具がバー3を引っ掛けて、当該バー3を搬送するようにすることもできる。
【0017】
前記フレーム17のサイズは任意に選択することができる。例えば、全長約1300cm、幅約100cm、高さ約70cm程度として、搬送体2の水平部における果菜受体1の搬送距離を約1300cmとすることができる。この場合、搬送体2のうち、フレーム17の始端部18から等級判別器15(図1)までの約500cmの間は、作業者が果菜受体1に果菜Aを載せるための作業スペースとし、等級判別器15からフレーム17の後端部19(図4)までの約700cmは、等級判別器15による果菜Aの判別結果に基づいて、走行中の果菜受体1をいずれかの下段搬送体5と上段搬送体6(図2)に自動的に振り分けるための振り分けスペースとしてある。
【0018】
(果菜受体の説明)
果菜受体1は図7、図6の様にバー3の長手方向に細長であり、その下部にバー3に取り付ける取付け部25が、上部に果菜Aを支持可能な搭載部26が形成されている。取付け部25にはその長さ方向に貫通された二つ貫通孔27が前後に形成され、図7の様に夫々の貫通孔27に前記二本一組のバー3を一本づつ貫通させることにより、果菜受体1がバー3の長さ方向(図7の矢印b−c方向)に往復スライドできるようにし、また、同図の矢印a方向に移動するバー3によって同方向に搬送されるようにしてある。果菜受体1の取付け部25の下面には図6の様にガイドピン28が下方に向けて突設されている。
【0019】
図6の果菜受体1の搭載部26は、中央部材29の両外側に空間部24をあけてサイド部材30を設けてある。空間部24は図8の様に幅の細いコンベア用のベルト43を差し込み可能となっている。中央部材29、サイド部材30の上面は果菜Aを横に寝かせることができるようにしてあり、中央部材29の上面には寝かせた果菜Aが転がらないようにするための二つの転がり防止突起31が前後に対向するように突設されている。この転がり防止突起31は果菜Aに傷が付かないように、ゴム製やウレタン製とするか、角を丸めておくのが好ましい。
【0020】
(等級判別器の説明)
図1の等級判別器15は果菜受体1に載せた果菜に光を投射する光源と、その果菜を撮影する電子カメラ(CCDカメラ)と、電子カメラの画像データを電算処理して果菜の曲がり、長さ、太さ等から果菜の等級を判別する処理回路等を備えており、それら全てがカバーで覆われている。前記処理回路は果菜の等級をAM、AL、2S、B、C・・・といった幾つかの等級に分け、得られた等級データが電気信号(制御信号)として出力されて、振分け機4を制御するようにしてある。等級判別器15は果菜受体1に果菜が載っていない場合は、その旨を検出するようにしてある。電子カメラは二台以上設けて二以上の角度から撮影して、精度の高い等級判別ができるようにすることもできる。
【0021】
果菜受体1の中央部材29の両側壁35及びこれと対向するサイド部材30の側壁36(図6)は垂直面とせず、上方に向けて僅かに外広がりになるように傾斜させて、果菜受体1の上方からそれに向けて垂直に照射される等級判別器15の光が、その傾斜面で反射されて等級判別器15に適度に戻るようにすることもできる。そのようにすると等級判別器15で得られる画像に空間部24による影ができにくくなって、精度の高い等級判別を行なうことができる。
【0022】
(振分機構の説明)
図7の振分け機4は、バー3の移送によって搬送される果菜受体1の進路を、等級判別器15からの判別情報(制御信号)に基づいて等級別に振り分けるものである。この振分け機4は主レール37と、それから斜め分岐された分岐レール38と、前記制御信号に基づいて果菜受体1の進路を主レール37と分岐レール38とに切替えるレール切替器39とから構成される。主レール37及び分岐レール38は上向きコ字状であり、バー3の移送によって搬送される果菜受体1の底のガイドピン28(図6)が嵌入されて進行できるようにしてある。
【0023】
図7のレール切替器39は主レール37と分岐レール38との分岐部に可動片40をピン41により首振り自在に設け、その可動片40を電磁石42により矢印c−d方向に首振りさせて、主レール37側と分岐レール38側とに切り替え可能としてある。可動片40は通常は図7の矢印d方向に待機していて、分岐レール38の入口が閉塞され、主レール37が開口し、搬送されてくる果菜受体1のガイドピン28が主レール37を直進し、果菜受体1が下段搬送体5を直進する。可動片40が電磁石42により図7の矢印c方向に首振りされると、主レール37が閉塞して分岐レール38の入口が開き、搬送されてくる果菜受体1のガイドピン28が分岐レール38に進入し、搬送されながらバー3の長手方向に自動的に横移動され、果菜受体1が等級別に振分けられるようにしてある。レール切替器39は可動片40を高速で切替え可能として、毎分21mのスピードで進行する果菜受体1の一つ一つを確実且つスムーズに、主レール37か分岐レール38のいずれかへ振り分け可能としてある。電磁石42は搬送体2の下方に設置されており、それへの電流供給の切替が等級判別器15から出力される制御信号により行われる。
【0024】
前記振分け機4は図3の様に上段取出機8よりも搬送方向手前と、搬送方向先方の二箇所に設けられている。搬送方向手前の振分け機4は果菜受体1を判別結果に基づいて上段取出機8の手前に振分けるものであり、搬送方向先方の振分け機4は果菜受体1を判別結果に基づいて下段取出機7の手前に振分けるものである。
【0025】
(上段取出機の説明)
図1の上段取出機8は上段搬送体6の手前に配置されて、振分け機4によって振分けられた果菜受体1から果菜Aを取出すことができるようにしてある。上段取出機8は搬送体2の幅方向に四本並べてある。その四本はいずれも同じ構造であり、図10の様に対向する上コンベア10と下コンベア11の間に果菜Aを挟んで搬送可能としたものであり、進行方向に次第に上り傾斜に配置して、果菜受体1から取り出した果菜Aを上段搬送体6まで搬送できるようにしてある。下コンベア11には図8の様に五本の細長いベルト43が使用されており、そのうち二本のベルト43を他の二本のベルトよりも手前に伸ばして果菜受体1の二つの空間部24に差し込み可能としてある。上コンベア10には柔らかい毛が植毛されたベルトが使用されている。この両コンベア10、11により果菜Aが挟まれて転げ落ちたり、向きが曲がったりしないようにする。両コンベア10、11間の間隔は固定でもよいが、図10に示す間隔調節機構44により上コンベア10の高さ(位置)を調節する事により調節可能としてある。
【0026】
図10の上段取出機8では、果菜Aを載せた果菜受体1が上段取出機8の下方を進行すると、図8に示すように果菜受体1の空間部24に二本のベルト43が自動的に進入し、果菜受体1の搭載部26に搭載されている果菜Aが同ベルト43に徐々に乗り上げて五本のベルト43の上に乗り上げ、それから図10の様に果菜Aが上コンベア10との間に挟まれて搬送されるようにしてある。果菜Aが取り出されて空になった果菜受体1はそのまま搬送体2により搬送されて、ドライブチェーン16(搬送体2)の折り返し部で下方に回り込み、搬送体2の下側を搬送されてフレーム17の始端側上方に戻る。この果菜受体1は下側を通過する間に、振分け時にバー3の横方向にスライドした分だけ元に戻されて、始端側上方に到来するときは、図1の様に、搬送体2の手前の列に位置するようにしてある。
【0027】
(下段取出機の説明)
図1の下段取出機7は下段搬送体5の手前に配置されて、振分け機4によって振分けられた果菜受体1から果菜Aを取出すためのものである。この下段取出機7は図11の様に、水平に配置された下コンベア11と上コンベア10の間に果菜Aを挟んで搬送できるようにしてある。下コンベア11は図10の上段取出機8と同じ構造であり、図8の様に幅の細いベルト43を五本並べ、そのうちの二本のベルト43を果菜受体1の二つの空間部24に差し込み可能なるように搬送方向手前側に長くして、果菜Aを載せた果菜受体1が下段取出機7の下方を進行すると、果菜受体1の空間部24に二本のベルト43が自動的に進入し、果菜受体1の搬送が進むにつれて、果菜Aがベルト43に徐々に乗り上げて五本のベルト43の上にまで乗り上げ、上コンベア10と下コンベア11の間に挟まれて搬送される。搬送された果菜Aは図11の様に下段搬送体5に送り込まれる。この場合も上コンベア10には柔らかい毛が植毛されたベルトが使用されている。果菜Aが取り出されて空になった果菜受体1は搬送体2の折り返し部で下方に回り込んで、フレーム17の始端側上方に戻る。この果菜受体1も下側を通過する間に、振分け時にバー3の横方向にスライドした分だけ元に戻されて、始端側上方に到来するときは図1の様に、搬送体2の手前の列に位置するようにしてある。
【0028】
前記ベルト43は果菜受体1の空間部24に差し込み可能な幅である約3cm、先端部のローラを含めた厚みが約2cmの無端ベルトコンベアであり、その回転によって果菜受体1の搭載部26に搭載されている果菜Aを取り出して搬送することができるようにしてある。
【0029】
(下段搬送体の説明)
図1〜図3の様に、四列の下段取出機7の先方には、夫々により取り出された果菜Aを引継いで搬送する四列の下段搬送体5が、四列の上段取出機8の先方には夫々により取り出された果菜Aを引継いで搬送する四列の上段搬送体6が配置されている。下段搬送体5及び上段搬送体6はベルトコンベアであり、それらの先端位置は手前側のものが短く、奥のものが長くなって、全体が階段状になって、夫々の搬送体5、6の側方に作業スペース12が確保されるようにしてある。また、下段搬送体5は走行速度を下段取出機7の搬送速度(約20m/s)よりも遅く(約7m/s)して、下段取出機7から間隔をおいて送り出される果菜Aが、その間隔が詰められて搬送されるようにしてある。下段搬送体5により搬送される果菜Aは搬送中に、作業スペース12に立っている作業者により箱詰めされたり、袋詰めされたりする。
【0030】
下段搬送体5及び上段搬送体6はベルトコンベアではなく、フリーフローの搬送機構(図示されていない)とすることもできる。それは、前方に果菜がつまっているときその果菜の後ろに続き、前の果菜が先方に移動するとそれに続いて後からの果菜も移動するものである。この機構にしても、下段取出機7、上段取出機8から間隔をあけて送り出される果菜が、下段搬送体5、上段搬送体6の上で自動的に連続して搬送される。
【0031】
下段搬送体5及び上段搬送体6の先方には自動包装装置を配置して、これらによって搬送されてくる果菜が自動包装装置により自動的に包装されるようにすることもできる。
【0032】
(他の実施形態)
図示した果菜自動選別装置は果菜を五列の下段搬送体5、四列の上段搬送体6の計九本により搬送できるようにしてあるが、下段搬送体5及び上段搬送体6の列数や等級分けの数は、これより多くても少なくても良い。また、本件発明の果菜自動選別装置は上記構成以外の構成とすることも可能である。
【0033】
【発明の効果】
本件出願の発明には次のような効果がある。
1.搬送方向手前の果菜受体に果菜を1個ずつ載せるだけで、果菜の等級が自動的に判別され、その判別情報に基づいて、下段搬送体と上段搬送体により搬送されるため、一人の作業者が下段搬送体と上段搬送体(上下2段の搬送体)により搬送されてくる果菜を取り出して箱詰めしたり、袋詰めしたりすることができ、一人で無駄なく箱詰めや袋詰ができる。
2.一つの搬送体の幅方向に複数の下段搬送体と上段搬送体を設けることができるので、幅が狭い小型の選別機で、多くの等級に選別して細かな等級分けが可能となる。
【0034】
本件出願の発明には、下段搬送体の手前に果菜受体から果菜を取り出して下段搬送体に送り込む下段取出機が、上段搬送体の手前に果菜受体から果菜を取り出して上段搬送体に送り込む上段取出機が配置されているので、上記効果に加えて、果菜受体からの果菜の取り出しが円滑に行われる、という効果もある。
【0035】
本件出願の発明は、振分け機が上段取出機よりも搬送方向手前と搬送方向先方とに設けられているので、搬送方向手前と先方で振分けることができるので、上記効果に加えて、搬送体の幅が狭くとも、果菜をより多くの進路に振分けることができる、という効果がある。
【0036】
本件出願の発明は、下段搬送体と上段搬送体が搬送体の幅方向に二列以上設けられているので、上記効果の他に、多数の種別に選別して振分けることができる、という効果もある。
【0037】
本件出願の発明は、果菜受体を無端状に連結した多数本のバーに取り付けて、バーの移動に伴って果菜受体が搬送されるようにしたので、上記効果の他に、果菜受体の移送が安定する、という効果もある。
【0038】
本件出願の発明は、果菜受体を無端状に連結した多数本のバーに、その長手方向にスライド可能に取り付けて、搬送中に振分け機により等級別にバーの長手方向にスライドして振分けられるようにしたので、搬送体の幅内で果菜受体を二以上の進路に振り分けることができ、長いバーを有効に使用することができる。
【0039】
本件出願の発明は、上記効果の他に次のような効果もある。
1.下段取出機、上段取出機が対向する上コンベアと下コンベアの間に果菜を挟んで搬送可能であるため、果菜受体からの果菜の取出しが確実になる。また、果菜の搬送も確実になる。
2.両コンベア間の間隔が調節可能であるため、その間隔を調節すれば両コンベア間に高さや径の異なる果菜を挟んで搬送することができる。例えば、間隔を狭くすれば瓜を、間隔を広くすれば茄子を搬送することができる。このため一台の選別機で各種サイズ、形状の果菜を切り替え搬送することができる。
【0040】
本件出願の発明は、下段搬送体及び上段搬送体の先端位置が段階的に異なるので、それら搬送体の側方に作業スペースを確保することができ、その作業スペースに作業者が立って箱詰め、袋詰め等の作業を効率良く行うことができる。
【図面の簡単な説明】
【図1】 本発明の果菜自動選別装置の全体斜視図。
【図2】 本発明の果菜自動選別装置の全体平面図。
【図3】 本発明の果菜自動選別装置の始端側の上カバーを取り外した状態の平面図。
【図4】 本発明の果菜自動選別装置の側面図。
【図5】 本発明の果菜自動選別装置のフレームと搬送体部分の概要を示す平面図。
【図6】 本発明の果菜自動選別装置における果菜受体の一例を示す斜視図。
【図7】 本発明の果菜自動選別装置における振分け機部分の平面図。
【図8】 本発明の果菜自動選別装置における下段取出し機の下コンベアの斜視図。
【図9】 本発明の果菜自動選別装置における上段取出機の前後部分の平面図。
【図10】 本発明の果菜自動選別装置における上段取出機の側面図。
【図11】 本発明の果菜自動選別装置における下段取出機の側面図。
【図12】 従来の果菜選別機の一例を示す説明図。
【符号の説明】
A 果菜
1 果菜受体
2 搬送体
3 バー
4 振分け機
5 下段搬送体
6 上段搬送体
7 下段取出機
8 上段取出機[0001]
BACKGROUND OF THE INVENTION
The present invention relates to an automatic fruit vegetable sorting apparatus that automatically sorts fruit and vegetables such as pepper and eggplant according to standards (classes) such as sizes and shapes.
[0002]
[Prior art]
As an automatic fruit vegetable sorting apparatus for sorting fruit and vegetables such as pepper and eggplant by grade such as size and shape, there has been conventionally a utility model registration No. 1805988 developed by the present inventor. As shown in FIG. 12, this fruit and vegetable automatic sorter arranges a plurality of belt conveyors A in a horizontal row, changes the tip position of the belt conveyor A step by step, and turns the belt conveyor A at the tip of each belt conveyor A. B is arranged.
[0003]
In the fruit and vegetable automatic sorting machine shown in FIG. 12, an operator C standing on the side of the start end of the belt conveyor A puts the pepper D on the grade while being placed on the belt conveyor A for each size, and is conveyed by the belt conveyor A. The worker E standing on the side of the belt conveyor A can pick up the pepper D and box it by size. The box D is not in time, and the leftover pepper D is sent out on the turntable B so that the pepper D sent out on the turn table B does not overlap.
[0004]
[Problems to be solved by the invention]
The fruit vegetable automatic sorter shown in Fig. 12 has the advantage that the surface of the pepper is not easily scratched, the warts on the surface are less likely to be lost, and it can be efficiently sorted and boxed with a small amount of manpower. There is a hassle that the fruit must be sorted and placed on the belt conveyor for each size while sorting the peppers by grade.
[0005]
[Means for Solving the Problems]
It is an object of the present invention to automatically sort fruit vegetables by grade during transportation, and can transport fruit vegetables without damaging them, and sorts fruit and vegetables of different sizes and diameters, such as strawberries and eggplants, with a single sorter. Furthermore, another object of the present invention is to provide an automatic fruit and vegetable sorting apparatus that allows a single worker to take out the fruit and vegetables transported by the upper and lower transport bodies and pack them in boxes or bags.
[0006]
The first fruit vegetables automatic sorting apparatus of the present application is to convey put the fruit vegetables to fruit vegetables receptacle, size fruit vegetables during transport, it is determined in graded such shape, the fruit vegetable automatic sorting apparatus for sorting fruit vegetables Grade, transport and two or more fruit vegetables receptacle which is arranged in the conveying direction of the body is transported by the carrier, two or more fruit vegetables receiving body that is conveyed by the conveying member is moved in the conveying direction transversely of the conveying member distributes in grade A sorter, an upper take-out machine that is arranged above the fruit vegetable receiver to be transported and takes out the identified specific grade of fruit vegetables from the fruit vegetable receiver, and takes out other grades of fruit vegetables from the fruit vegetable receiver. and lower take-out machine, the upper transport member that transports taken over preparative out a fruit vegetable in the upper take-out machine, comprising a lower carrier for conveying taken over the fruit vegetables picked in the lower take-out machine, the upper transport body arranged above the lower carrier Is, the upper carrier in the other party of the upper take-out machine, the lower carrier is respectively arranged in other party of the lower take-out machine, the upper take-out machine and the upper carrier is disposed in lateral movement within the maximum width of the fruit vegetables receptacle Is.
[0007]
Second fruiting automatic sorting apparatus of the present application is to convey put the fruit vegetables to fruit vegetables receptacle, size fruit vegetables during transport, it is determined in graded such shape, the fruit vegetable automatic sorting apparatus for sorting fruit vegetables Grade, transport and two or more fruit vegetables receptacle which is arranged in the conveying direction of the body is transported by the carrier, two or more fruit vegetables receiving body that is conveyed by the conveying member is moved in the conveying direction transversely of the conveying member distributes in grade A sorter, an upper take-out machine that is arranged above the fruit vegetable receiver to be transported and takes out the identified specific grade of fruit vegetables from the fruit vegetable receiver, and takes out other grades of fruit vegetables from the fruit vegetable receiver. and lower take-out machine, the upper transport member that transports taken over preparative out a fruit vegetable in the upper take-out machine, comprising a lower carrier for conveying taken over the fruit vegetables picked in the lower take-out machine, the upper transport body arranged above the lower carrier The upper transport body is disposed at the front of the upper unloader, the lower transport body is disposed at the front of the lower unloader, and the upper transport body or the lower transport body is disposed in two or more rows in the width direction thereof, and two or more rows are disposed. The front end position of the upper transport body and / or the lower transport body is stepwise changed in the transport direction so that the front side in the width direction is closer to the front side in the transport direction than the rear side, and the front side A work space is secured in front of the leading end of the upper transport body and / or the lower transport body .
[0008]
The third automatic vegetable vegetable sorting apparatus of the present application is the automatic vegetable vegetable sorting device according to claim 1 , wherein both or one of the upper and lower transport bodies are arranged in two or more rows in the width direction thereof, The front end position of the upper transport body and / or the lower transport body is gradually changed in the transport direction so that the front side in the width direction is closer to the front side in the transport direction than the rear side, and the front side A work space is secured at the tip of the upper transport body and / or the lower transport body .
[0009]
According to a fourth fruit vegetable automatic sorting apparatus of the present application, in the fruit vegetable automatic sorting apparatus, the fruit vegetables to be sent out from the lower stage take-out machine with the traveling speed of the lower stage lower than that of the lower stage take-out machine are separated. In this case, the sheet is conveyed by the lower conveyance body with a gap .
[0010]
According to a fifth fruit vegetable automatic sorting apparatus of the present application, in the fruit vegetable automatic sorting apparatus, the lower take-out machine and the upper take-out machine are capable of transporting the vegetable vegetables between the upper conveyor and the lower conveyor facing each other.
[0011]
The sixth fruit and vegetable automatic sorting apparatus of the present application is the fruit and vegetable automatic sorting apparatus, wherein the fruit and vegetable receiver includes a space part through which an upper take-out machine or a lower take-out machine can pass, and the space part is an upper or lower take-out machine. It is the width and depth through which the unloader can pass and is opened in the transport direction .
[0012]
In the automatic fruit vegetable sorting apparatus of the present application, in the fruit vegetable automatic sorting apparatus, the transport body is an endless shape in which a large number of bars are arranged and connected at intervals in the transport direction. It is attached so as to be slidable in the longitudinal direction, and is slid and distributed in the longitudinal direction of the bar according to grade during conveyance by the conveyance body.
[ 0013 ]
DETAILED DESCRIPTION OF THE INVENTION
(Embodiment 1)
The following describes a fruit vegetable automatic sorting apparatus according to a second embodiment of the present invention, taking as an example the case of selecting pepper. This fruit vegetable automatic sorting apparatus conveys the fruit vegetable receiver 1 (FIG. 6) by the conveying
[ 0014 ]
(Description of carrier)
As shown in FIG. 5, the
[ 0015 ]
The
[ 0016 ]
The number of
[ 0017 ]
The size of the
[ 0018 ]
(Description of fruit vegetable acceptor)
The fruit vegetable receiver 1 is elongated in the longitudinal direction of the
[ 0019 ]
The mounting
[ 0020 ]
(Description of classifier)
The
[ 0021 ]
Both
[ 0022 ]
(Explanation of sorting mechanism)
The
[ 0023 ]
The
[ 0024 ]
As shown in FIG. 3, the
[ 0025 ]
(Explanation of upper unloader)
The upper take-out
[ 0026 ]
In the upper take-out
[ 0027 ]
(Explanation of lower unloader)
A lower take-out
[ 0028 ]
The
[ 0029 ]
(Description of lower carrier)
As shown in FIGS. 1 to 3, the four rows of lower-
[ 0030 ]
The
[ 0031 ]
It is also possible to arrange an automatic packaging device ahead of the
[ 0032 ]
(Other embodiments)
The fruit and vegetable automatic sorting apparatus shown in the figure is configured so that fruit vegetables can be conveyed by a total of nine rows of five rows of
[ 0033 ]
【The invention's effect】
The invention of the present application has the following effects.
1. Just by placing the fruit and vegetables one by one on the fruit receiver in front of the direction of conveyance, the grade of the fruit and vegetables is automatically identified, and based on the discrimination information, it is conveyed by the lower conveyance body and the upper conveyance body. A person can take out the fruits and vegetables transported by the lower transport body and the upper transport body (upper and lower transport bodies) and pack them in a box, or pack them in a bag.
2. Since a plurality of lower-stage transport bodies and upper-stage transport bodies can be provided in the width direction of one transport body, a small sorter with a narrow width can be sorted into many grades and finely classified.
[ 0034 ]
In the invention of the present application, the lower take-out machine that takes out the fruit vegetables from the fruit receiver in front of the lower carrier and sends them to the lower carrier, takes out the fruit vegetables from the fruit receiver in front of the upper carrier and sends them to the upper carrier. Since the upper take-out machine is arranged, in addition to the above effects, there is also an effect that fruit vegetables are smoothly taken out from the fruit vegetable receiver.
[ 0035 ]
In the invention of this application, since the sorter is provided in the transport direction front and the transport direction ahead of the upper take-out machine, it can be sorted in the transport direction front and the front, so in addition to the above effects, the transport body Even if the width is narrow, there is an effect that fruit vegetables can be distributed to more courses.
[ 0036 ]
In the invention of the present application, since the lower transport body and the upper transport body are provided in two or more rows in the width direction of the transport body, in addition to the above effects, it is possible to sort and sort into many types There is also.
[ 0037 ]
In the invention of the present application, since the fruit vegetable acceptor is attached to a large number of bars connected endlessly, and the fruit vegetable acceptor is conveyed as the bar moves, in addition to the above effects, the fruit vegetable acceptor There is also an effect that the transfer of the water becomes stable.
[ 0038 ]
The invention of this application is attached to a large number of bars with endlessly connected fruit and vegetable acceptors so as to be slidable in the longitudinal direction, and can be slid by the sorter in the longitudinal direction of the bars by a sorter during transportation. As a result, the fruit vegetable acceptor can be divided into two or more paths within the width of the carrier, and a long bar can be used effectively.
[ 0039 ]
The invention of the present application has the following effects in addition to the above effects.
1. Since the lower-stage extractor and the upper-stage extractor can convey the vegetable vegetables between the upper conveyor and the lower conveyor facing each other, the extraction of the fruit vegetables from the fruit vegetable receiver is ensured. Moreover, the conveyance of fruit vegetables is also ensured.
2. Since the interval between both conveyors can be adjusted, if the interval is adjusted, fruit vegetables with different heights and diameters can be sandwiched and conveyed between both conveyors. For example, if the interval is narrowed, the cage can be conveyed, and if the interval is widened, the insulator can be conveyed. For this reason, a variety of sizes and shapes of fruits and vegetables can be switched and conveyed by a single sorter.
[ 0040 ]
In the invention of this application, since the tip positions of the lower transport body and the upper transport body are different in stages, a work space can be secured on the side of the transport body, and an operator stands in the work space and boxed. Work such as bagging can be performed efficiently.
[Brief description of the drawings]
FIG. 1 is an overall perspective view of an automatic vegetable vegetable sorting apparatus according to the present invention.
FIG. 2 is an overall plan view of an automatic fruit vegetable sorting apparatus according to the present invention.
FIG. 3 is a plan view showing a state in which the upper cover on the start end side of the automatic vegetable vegetable sorting apparatus of the present invention is removed.
FIG. 4 is a side view of an automatic fruit vegetable sorting apparatus according to the present invention.
FIG. 5 is a plan view showing an outline of a frame and a carrier part of the fruit vegetable automatic sorting apparatus of the present invention.
FIG. 6 is a perspective view showing an example of a fruit vegetable acceptor in the fruit vegetable automatic sorting apparatus of the present invention.
FIG. 7 is a plan view of a sorter portion in the fruit and vegetable vegetable automatic sorting apparatus of the present invention.
FIG. 8 is a perspective view of the lower conveyor of the lower take-out machine in the fruit vegetable automatic sorting apparatus of the present invention.
FIG. 9 is a plan view of the front and rear portions of the upper take-out machine in the fruit vegetable automatic sorting apparatus of the present invention.
FIG. 10 is a side view of the upper take-out machine in the fruit vegetable automatic sorting apparatus of the present invention.
FIG. 11 is a side view of a lower take-out machine in the fruit vegetable automatic sorting apparatus of the present invention.
FIG. 12 is an explanatory diagram showing an example of a conventional fruit vegetable sorting machine.
[Explanation of symbols]
A Fruit vegetable 1
Claims (7)
搬送体の搬送方向に配置されて搬送体により搬送される二以上の果菜受体と、
搬送体により搬送される二以上の果菜受体を搬送体の搬送方向横方向に移動させて等級別に振分ける振分け機と、
搬送される果菜受体よりも上方に配置されて、前記判別済みの特定等級の果菜を果菜受体上から取出す上段取出機と、他の等級の果菜を果菜受体上から取出す下段取出機と、
前記上段取出機で取出された果菜を引継いで搬送する上段搬送体と、前記下段取出機で取出された果菜を引継いで搬送する下段搬送体を備え、
前記上段搬送体は前記下段搬送体よりも上方に配置され、
前記上段搬送体は上段取出機の先方に、下段搬送体は下段取出機の先方に夫々配置され、
上段取出機及び上段搬送体が前記果菜受体の横移動最大幅内に配置されたことを特徴とする果菜自動選別装置。In an automatic fruit vegetable sorting device that transports fruit vegetables on a fruit receiver, discriminates fruit vegetables by size, shape, etc. during transportation, and sorts fruit vegetables by grade,
And fruit vegetables receptacle of two or more that is conveyed by the conveying member is disposed in the conveying direction of the conveying member,
A sorter that moves two or more fruit and vegetable receivers transported by the transport body laterally in the transport direction of the transport body and sorts them by grade;
An upper take-out machine that is arranged above the conveyed fruit vegetable receiver and takes out the identified specific grade of fruit vegetables from the fruit receiver; and a lower take-out machine that takes out other grades of fruit vegetables from the fruit receiver. ,
And upper transport member that transports taken over the fruit vegetables issued preparative said upper unloader comprises a lower carrier for conveying taken over the fruit vegetables picked in the lower take-out machine,
The upper transport body is disposed above the lower transport body,
The upper transport body is disposed at the front of the upper unloader, and the lower transport body is disposed at the front of the lower unloader, respectively.
An automatic fruit vegetable sorting apparatus, wherein the upper take-out machine and the upper carrier are arranged within the maximum lateral movement width of the fruit vegetable receiver .
搬送体の搬送方向に配置されて搬送体により搬送される二以上の果菜受体と、
搬送体により搬送される二以上の果菜受体を搬送体の搬送方向横方向に移動させて等級別に振分ける振分け機と、
搬送される果菜受体よりも上方に配置されて、前記判別済みの特定等級の果菜を果菜受体上から取出す上段取出機と、他の等級の果菜を果菜受体上から取出す下段取出機と、
前記上段取出機で取出された果菜を引継いで搬送する上段搬送体と、前記下段取出機で取出された果菜を引継いで搬送する下段搬送体を備え、
前記上段搬送体は前記下段搬送体よりも上方に配置され、
前記上段搬送体は上段取出機の先方に、下段搬送体は下段取出機の先方に夫々配置され、
上段搬送体と下段搬送体の双方又は一方はそれらの幅方向に二列以上配置され、
二列以上の上段搬送体又は/及び下段搬送体の先端位置を、前記幅方向手前側のものが奥側のものよりも搬送方向手前までにして搬送方向に段階的に異ならせ、前記手前までにした上段搬送体又は/及び下段搬送体の先端部の先方に作業スペースを確保したことを特徴とする果菜自動選別装置。In an automatic fruit vegetable sorting device that transports fruit vegetables on a fruit receiver, discriminates fruit vegetables by size, shape, etc. during transportation, and sorts fruit vegetables by grade,
And fruit vegetables receptacle of two or more that is conveyed by the conveying member is disposed in the conveying direction of the conveying member,
A sorter that moves two or more fruit and vegetable receivers transported by the transport body laterally in the transport direction of the transport body and sorts them by grade;
An upper take-out machine that is arranged above the conveyed fruit vegetable receiver and takes out the identified specific grade of fruit vegetables from the fruit receiver; and a lower take-out machine that takes out other grades of fruit vegetables from the fruit receiver. ,
And upper transport member that transports taken over the fruit vegetables issued preparative said upper unloader comprises a lower carrier for conveying taken over the fruit vegetables picked in the lower take-out machine,
The upper transport body is disposed above the lower transport body,
The upper transport body is disposed at the front of the upper unloader, and the lower transport body is disposed at the front of the lower unloader, respectively.
Both or one of the upper carrier and the lower carrier is arranged in two or more rows in the width direction thereof,
Two or more rows of upper-stage transport bodies and / or lower-stage transport bodies, the front end position of the front side in the width direction differing from the back side in front of the transport direction, and gradually differ in the transport direction until the front side. An automatic fruit vegetable sorting apparatus characterized in that a working space is secured at the tip of the upper transport body and / or the lower transport body .
上段搬送体と下段搬送体の双方又は一方はそれらの幅方向に二列以上配置され、
二列以上の上段搬送体又は/及び下段搬送体の先端位置を、前記幅方向手前側のものが奥側のものよりも搬送方向手前までにして搬送方向に段階的に異ならせ、前記手前までにした上段搬送体又は/及び下段搬送体の先端部の先方に作業スペースを確保したことを特徴とする果菜自動選別装置。In the fruit vegetable automatic sorting device according to claim 1 ,
Both or one of the upper carrier and the lower carrier is arranged in two or more rows in the width direction thereof,
Two or more rows of upper-stage transport bodies and / or lower-stage transport bodies, the front end position of the front side in the width direction differing from the back side in front of the transport direction, and gradually differ in the transport direction until the front side. An automatic fruit vegetable sorting apparatus characterized in that a working space is secured at the tip of the upper transport body and / or the lower transport body .
下段搬送体の走行速度を下段取出機の搬送速度よりも遅くして、下段取出機から間隔を開けて送り出される果菜が、間隔をつめて下段搬送体で搬送されるようにしたことを特徴とする果菜自動選別装置。In fruit vegetable automatic sorting apparatus according to any one of claims 1 to 3,
The travel speed of the lower transport body is made slower than the transport speed of the lower unloader, and the fruits and vegetables sent out from the lower unloader at an interval are transported by the lower transport body at intervals. Fruit vegetable automatic sorting device.
下段取出機及び上段取出機は、対向する上コンベアと下コンベア間に果菜を挟んで搬送可能であることを特徴とする果菜自動選別装置。In fruit vegetable automatic sorting apparatus according to any one of claims 1 to 4,
An automatic fruit vegetable sorting apparatus, wherein the lower and upper stage take-out machines are capable of transporting fruit vegetables between opposing upper and lower conveyors.
果菜受体は上段取出機又は下段取出機が通過することのできる空間部を備えており、空間部は上段取出機又は下段取出機が通過できる幅と深さであり、且つ搬送方向に開通されたことを特徴とする果菜自動選別装置。 In the fruit vegetable automatic selection device according to any one of claims 1 to 5,
The fruit vegetable receiver is provided with a space part through which the upper take-out machine or the lower take-out machine can pass, and the space part has a width and a depth through which the upper take-out machine or the lower take-out machine can pass and is opened in the conveying direction. An automatic fruit vegetable sorting device characterized by that.
搬送体は多数本のバーが搬送方向に間隔をあけて配置連結された無端状であり、
各果菜受体はそれらバーにその長手方向にスライド可能に取り付けられ、搬送体による搬送中に等級別にバーの長手方向にスライドされて振分けられるものであることを特徴とする果菜自動選別装置。In fruit vegetable automatic sorting apparatus according to any one of claims 1 to 6,
The transport body is an endless shape in which a large number of bars are arranged and connected at intervals in the transport direction,
The fruit and vegetable acceptor is attached to the bars so as to be slidable in the longitudinal direction thereof, and is slid and distributed in the longitudinal direction of the bars according to the grade during conveyance by the conveyance body.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000291024A JP4602527B2 (en) | 2000-09-25 | 2000-09-25 | Fruit and vegetable automatic sorting device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000291024A JP4602527B2 (en) | 2000-09-25 | 2000-09-25 | Fruit and vegetable automatic sorting device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002096028A JP2002096028A (en) | 2002-04-02 |
| JP2002096028A5 JP2002096028A5 (en) | 2007-08-30 |
| JP4602527B2 true JP4602527B2 (en) | 2010-12-22 |
Family
ID=18774167
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000291024A Expired - Lifetime JP4602527B2 (en) | 2000-09-25 | 2000-09-25 | Fruit and vegetable automatic sorting device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4602527B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006136871A (en) * | 2004-10-14 | 2006-06-01 | Maki Mfg Co Ltd | Agricultural product sorting apparatus |
| JP5834155B1 (en) * | 2015-02-20 | 2015-12-16 | 日本協同企画株式会社 | Fruit and vegetable automatic sorting device |
| JP6502827B2 (en) * | 2015-10-30 | 2019-04-17 | 日本協同企画株式会社 | Fruit and vegetables automatic sorting device |
-
2000
- 2000-09-25 JP JP2000291024A patent/JP4602527B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002096028A (en) | 2002-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6641431B2 (en) | Fruit and vegetable automatic sorting method, fruit and vegetable body, fruit and vegetable automatic sorting device | |
| JP5658444B2 (en) | Fruit and vegetable automatic sorting device and fruit and vegetable automatic sorting method | |
| JP4602527B2 (en) | Fruit and vegetable automatic sorting device | |
| JP5834155B1 (en) | Fruit and vegetable automatic sorting device | |
| JP4386495B2 (en) | Fruit and vegetable automatic sorting device | |
| JP2018094453A (en) | Automatic fruit/vegetable sorting method and automatic fruit/vegetable sorting device | |
| JPS61149282A (en) | Method and device for selecting soft article | |
| JP6502827B2 (en) | Fruit and vegetables automatic sorting device | |
| JP3340940B2 (en) | Fruit sorter | |
| JP7462929B2 (en) | Automatic fruit and vegetable sorting device | |
| JP2016153119A5 (en) | ||
| JPS595030B2 (en) | Automatic fruit processing method for fruits, etc. | |
| JP3706402B2 (en) | Long vegetable boxing equipment | |
| JP3249080B2 (en) | Automatic fruit sorting equipment and fruit receiver used for it | |
| JP7436008B2 (en) | Automatic fruit and vegetable sorting device and fruit and vegetable receiver | |
| JPS60132811A (en) | Fruit sorter | |
| JP2024098818A (en) | Pool conveyor and fruit vegetable automatic screening device | |
| JPH0957217A (en) | Food assorting device | |
| JP2503820Y2 (en) | Fruit and vegetable sorting equipment | |
| JP3251392B2 (en) | Automatic fruit sorting equipment | |
| JP3251442B2 (en) | Automatic fruit sorting equipment | |
| JP4904648B2 (en) | Long vegetable sorting box | |
| JPH0957213A (en) | Quality deciding device and assorting device for mushrooms | |
| JP3491992B2 (en) | Fruit and vegetable automatic sorting device | |
| JPH0685915B2 (en) | Fruit picking device of fruit sorter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070711 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100615 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100617 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100812 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100921 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100930 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131008 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4602527 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |