JP4593211B2 - カプセル型医療装置 - Google Patents
カプセル型医療装置 Download PDFInfo
- Publication number
- JP4593211B2 JP4593211B2 JP2004261015A JP2004261015A JP4593211B2 JP 4593211 B2 JP4593211 B2 JP 4593211B2 JP 2004261015 A JP2004261015 A JP 2004261015A JP 2004261015 A JP2004261015 A JP 2004261015A JP 4593211 B2 JP4593211 B2 JP 4593211B2
- Authority
- JP
- Japan
- Prior art keywords
- medical device
- electrode
- capsule medical
- electrodes
- electric wire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Description
撓性電線が、形状記憶材料により構成されているとともに、該可撓性電線の基端側は、前
記電線収納部内に回転自在に支持された回転軸に連結されていることを特徴とする。
請求項14に記載の発明は、前記電極が生体組織に電気刺激を与える電気刺激手段であることを特徴とする。
先ず、第1実施形態について、図1乃至図15を用いて説明する。
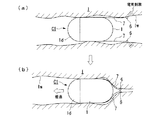
図1(a)、(b)及び図2に示すカプセル型医療装置C1は、本実施形態に係るカプセル型医療装置の基本形態となるものである。このカプセル型医療装置C1は、撮像部(生体情報取得手段)2と、制御部(電流制御手段)3と、無線送受信部(通信手段)4と、各構成部に電力を供給する電池5とを筐体1内に一体に備えているとともに、一対の電極6、6と、これら一対の電極6,6間の距離を可変とする電極間距離可変手段としての可撓性の可撓性電線7,7と、を備えた構成とされた、無線式のカプセル型医療装置である。
なお、これら可撓性電線7,7は、超弾性合金により構成されていることが好ましい。このように、超弾性合金を用いることとすれば、通常の金属等と比較して弾性変形可能範囲がより広範となるため、生体内における管腔の径の差異を更に的確に吸収することができる。
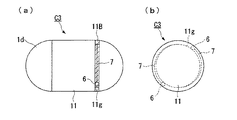
なお、図1(c)に示すように、可撓性電線7,7を帯状電線(符号7w,7w)とし、電極6,6もそれに合わせてほぼ同幅の横長電極(符号6w,6w)としてもよい。こうすることにより、更に大きな電気的接触面積を確保することができ、より安定して、収縮に必要な電流量を生体組織に送ることが可能となる。
更に、電極6,6と可撓性電線7,7は、カプセル型医療装置C1の径方向に180°間隔で一対配設しているが、例えば90°間隔で二対(合計4つ)配設するようにしてもよい。このようにすると、電極6,6をより確実に生体組織に接触させることができる。
無線送受信部102は、カプセル型医療装置C1の無線送受信部4と同様に、図示しない送受信部本体と電波を発信及び受信する送受信アンテナ(発信アンテナ、受信アンテナ)とから構成されており、カプセル型医療装置C1から無線送信されてきた生体情報である撮像画像を受信するとともに、制御部104に送る機能を有している。
まず、ベルト等を介して体外装置100を装着した後、被検者は、カプセル型医療装置C1を経口投入(飲み込み)することにより、体内(生体内)に導入する。なおこの体内導入前には、図3に示すように、デンプン等の生体吸収材料からなる電線結束バンド(電線結束手段)7Bによって可撓性電線7,7同士を予め結束しておき、飲み込み時において可撓性電線7,7及び電極6.6が邪魔にならないようにしておく。
この経口投入時においてカプセル型医療装置C1には、図示しないスイッチが入るようになっており、電池5から各構成品に電力が供給される。これにより、制御部3は、撮像部2、即ち、撮像素子2a及び発光素子2bを作動させる。
このような電極間距離可変手段を設けているので、生体組織に電極6,6を的確に接触させて電気刺激を与え、生体組織の収縮動作を的確に行わせることが可能となり、カプセル型医療装置C1の安定した推進を実現することができる。
なお、カプセル型医療装置C1における、撮像部2(撮像素子2a及び発光素子2b)、制御部3、無線送受信部4及び電池5といった各構成要素は、以下の各変形例に係るカプセル型医療装置の全てにおいて同様に設けられている、共通の構成要素である。そのため、以下において、これら構成要素の図示や詳細な説明は省略することとする。またこの他にも、カプセル型医療装置C1における構成要素と同様の構成要素については、同一の符号を付して、その詳細な説明は省略することとする。
このカプセル型医療装置C2は、上記カプセル型医療装置C1における筐体1の前方側(軸線L方向の他方の端部側)に、一対の前側電極(第2の電極)8,8と、これら一対の前側電極8,8間の距離を可変とする第2の電極間距離可変手段としての可撓性の前側可撓性電線9,9と、を付加した構成とされている。これら前側電極8,8及び前側可撓性電線9,9は、電極6,6及び可撓性電線7,7と略同一の構成とされている。
また前側可撓性電線9,9は、筐体1内で制御部3(図2に図示)と連結されており、電流発生回路3aからの電流を前側電極8,8へと各々流すとともに、弾性変形することで前側電極8,8間の距離を可変とする機能を有している。なお、ここでの制御部3は、無線送受信部4からの制御信号(指令)に基づいて、電極6,6に流す電流の制御とは独立して前側電極8,8に流す電流を制御する、第2の電流制御手段としての機能も有している。
また、撮像部を後側にも設けるようにしてもよい。こうすれば、より隅々までくまなく観察することが可能となる。
このカプセル型医療装置C3は、上記カプセル型医療装置C1とは筐体の構成が異なっている。すなわちこのカプセル型医療装置C3の筐体11には、その外周にわたって、電極6及び可撓性電線7を収納する溝11gが形成されている。このカプセル型医療装置C3の体内導入前には、図6に示すように、デンプン等の生体吸収材料からなる電線バインダ(電線固定手段)11Bによって電極6,6及び可撓性電線7,7を溝11g内に予め固定しておき、飲み込み時において可撓性電線7,7及び電極6.6が邪魔にならないようにしておく。
そして、カプセル型医療装置C1が胃に達した場合、電線結束バンド7Bは胃酸によって溶解されて体内に吸収され、図7に示すように、電極6,6及び可撓性電線7,7は固定を解かれて展開可能となり、電極6,6間の距離は可変となる。
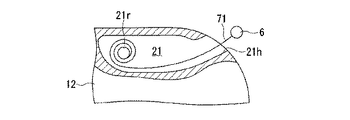
このカプセル型医療装置C4は、上記カプセル型医療装置C1とは、筐体の構成及び可撓性電線の構成が異なっている。
このカプセル型医療装置C4においては、筐体12に、可撓性電線71,71及び電極6,6を筐体12内部に収納する電線収納部21,21が各々設けられている。そして、可撓性電線71,71は、形状記憶合金により構成されている。
このカプセル型医療装置C5は、上記カプセル型医療装置C1とは電極間距離可変手段の構成が異なっている。すなわち、電極61,61が一体に固定されて、筐体13の外側に、この筐体13に対して互いに径方向に離間するように移動可能に取り付けられた外殻部72a,72bが、電極間距離可変手段とされている。
図12(a)に示す電極61aは、外殻部72aの外面から半球状をなして突出する半球型電極とされている。このような半球型電極とすれば、生体組織と接触し易くすることができるとともに、角隅部が無いためにカプセル型医療装置C5をより滑らかに推進させることができる。
あるいは、バネ72s,72sを形状記憶合金で構成し、体内の温度によってバネ72s,72sを伸張させて、外殻部72a,72bを展開させるようにしてもよい。
このカプセル型医療装置C6は、カプセル型医療装置C1において一対しか設けられていなかった電極及び可撓性電線を、筐体の周上により多数設けるとともに、電流を流す電極を選択可能な手段(電極セレクタ)を備えた構成とされている。
図14(a)には、略球形状の電極6を示しているが、これに限定されるものではなく、図14(b)に示すフック形状の電極6a、図14(c)に示す輪形状の電極6b、図14(d)に示す棒状の電極6c、図14(e)に示す、より大きな接触面積が得られる電極6d等、カプセル型医療装置C6の使用態様に応じて、電極形状は適宜変更が可能である。
このカプセル型医療装置C7は、上記カプセル型医療装置C5における電極の配置を変更したものであって、外殻部72a,72bの外面の略全面にわたって電極を設けるとともに、こうした電極を多数の電極61d,61d,…に分割して、通電する電極61d,61d,…を任意に選択可能な構成とされている。
次に、第2の実施形態について、図17乃至図25を用いて説明する。
なお、本実施形態においては、上記第1の実施形態における構成要素と同様の構成要素については、同一の符号を付して、その詳細な説明は省略することとする。
一方、可撓性電線7,7を最大限まで繰り出し、電極6,6及び可撓性電線7,7を最大展開した状態を、図20に示す。後述するように、カプセル型医療装置C10が胃に到達した時等においては、この状態とする。
なお、モータM,Mの動作を制御することによって、可撓性電線7,7の繰り出し量及び巻き取り量を任意に変化させることができるので、例えば図19に示すように、可撓性電線7,7を完全収納状態から少しだけ繰り出して、ほぼ電極6,6のみが開口部21h,21hから突出するような状態とすることもできる。
まず、ベルト等を介して体外装置100を装着した後、被検者は、カプセル型医療装置C10を経口投入(飲み込み)する。なおこの体内導入前には、図17に示すように、可撓性電線7,7及び電極6,6を電線収納部21,21内に完全収納しておき、飲み込み時において邪魔にならないようにしておく。
この飲み込み時においてカプセル型医療装置C10には、図示しないスイッチが入るようになっており、電池5から各構成部に電力が供給される。これにより、制御部3は、撮像部2、すなわち撮像素子2a及び発光素子2bを作動させる。
胃は大変広い管腔を有する臓器であるため、この場合に制御部104は、図20に示すように電極6,6及び可撓性電線7,7を最大展開するように、且つ電極6,6から単発の電気刺激を与えるように、無線送受信部102を介して制御信号を送信する。こうした単発の電気刺激により、胃の蠕動運動が誘発されて、あるいは局所的な筋収縮によって、カプセル型医療装置C10は、胃を通過して十二指腸へと達する。
また、カプセル型医療装置C10が肛門(直腸近傍)に位置していることを患者あるいは医師等に通知する通知手段を体外装置100に設けるようにして、排泄可能なタイミングを伝達可能なようにすると、利便性が向上する。
一方、医師等は、体外装置100の記録部103に記録された生体情報である撮像画像に基づいて、被検者の健康状態の診断を行う。
また、モータM,Mは、細い可撓性電線7,7の繰り出し・巻き取り駆動を行うだけであるので、電気エネルギーの消費が少なく、バッテリー(電池)駆動のカプセル型医療装置C10の負担になりにくい。
なお、カプセル型医療装置C10における、撮像部2(撮像素子2a及び発光素子2b)、制御部3、無線送受信部4及び電池5といった各構成要素は、以下の各変形例に係るカプセル型医療装置の全てにおいて同様に設けられている、共通の構成要素である。そのため、以下において、これら構成要素の図示や詳細な説明は省略することとする。またこの他にも、カプセル型医療装置C10における構成要素と同様の構成要素については、同一の符号を付して、その詳細な説明は省略することとする。
このカプセル型医療装置C11は、上記カプセル型医療装置C10とは、一対の電極のうちの一方を、筐体に直接固定した固定電極とするとともに、固定電極側の筐体内におもりを設けている点が異なっている。
そして、筐体16内における電極収納部21と径方向反対側には、重りGが設けられている。これによって、固定電極62側が常に下方を向くようにできるので、固定電極62を粘膜等に的確に接触させることができる。
このカプセル型医療装置C12は、上記カプセル型医療装置C11の前方側に、一対の電極を付加した構成とされている。
なお、前側固定電極82を透明電極とし、視野範囲Vの内側に配設するようにしてもよい。この場合には、生体組織により接触させ易い位置・大きさの電極を採用することができる。
そして、筐体16内における電極収納部21と径方向反対側には重りGが設けられており、これによって、固定電極62側が常に下方を向くようにできるので、固定電極62と前側固定電極82とを粘膜等に的確に接触させることができる。
なお、このカプセル型医療装置C12の飲み込み時には、前側電極8及び前側可撓性電線9が邪魔にならないように、後ろ向きに飲み込むことが好ましい。
このカプセル型医療装置C13は、上記カプセル型医療装置C10とは、電線収納部、及び可撓性電線の繰り出し・巻き取り機構が異なっている。
また、筐体17内においてデッドスペースとなりがちな、後端部近傍位置のテーパー部分の内側に、電線収納部26及びモータM2を設けるようにしているので、筐体17内の限られたスペースを有効利用することができる。
前記可撓性電線を前記溝内に固定する、生体内で溶解する電線固定手段が設けられていることを特徴とする請求項14に記載のカプセル型医療装置。
前記可撓性電線は、30℃以下の温度では略ゼンマイ状に巻かれた状態となり、35℃以上の温度では略直線状に形状復帰するように形状記憶がなされていることを特徴とする請求項15に記載のカプセル型医療装置。
前記電線収納部内を加温する加温手段が備えられているとともに、前記可撓性電線は、40℃以上の温度で、略ゼンマイ状に巻かれた状態から略直線状に形状復帰するように形状記憶がなされていることを特徴とする請求項15に記載のカプセル型医療装置。
前記外殻部と前記筐体との間には、前記外殻部を前記径方向外側に付勢するバネが備えられていることを特徴とする請求項10に記載のカプセル型医療装置。
前記外殻部と前記筐体との間には、吸水時に膨張する吸水ゲルが介装されていることを特徴とする請求項10に記載のカプセル型医療装置。
前記電極が、前記外殻部の外面から半球状をなして突出する半球型電極とされていることを特徴とする請求項10に記載のカプセル型医療装置。
前記電極が、前記外殻部の外面から円柱状をなして突出する円柱型電極とされていることを特徴とする請求項10に記載のカプセル型医療装置。
前記電極が、前記外殻部の外面と略面一となって連なるように前記外殻部に埋め込んだ埋込型電極とされていることを特徴とする請求項10に記載のカプセル型医療装置。
前記可撓性電線の基端側が、前記電線収納部内に回転可能に支持された回転軸に連結されているとともに、該回転軸を回転駆動するアクチュエータが備えられていることを特徴とする請求項13に記載のカプセル型医療装置。
1,11,12,13,14,16,17 筐体
2 撮像部(生体情報取得手段)
3 制御部(電流制御手段、第2の電流制御手段)
4 無線送受信部(通信手段)
5 電池
6,6a,6b,6c 電極
6s 電極セレクタ
6s2 電極セレクタ(電極面積可変手段)
7 可撓性電線(電極間距離可変手段)
7B 電線結束バンド(電線結束手段)
8 前側電極(第2の電極)
9 前側可撓性電線(第2の電極間距離可変手段)
11g 溝
11B 電線バインダ(電線固定手段)
21,26 電線収納部
21r,22r 回転軸
26r 回転台
61,61a、61b、61c、61d 電極
62 固定電極(電極)
71 電線(電極間距離可変手段)
72a,72b 外殻部(電極間距離可変手段)
82 前側固定電極(第2の電極)
L 軸線
M,M2 モータ(アクチュエータ)
Claims (14)
- 生体内に導入されて生体情報を検出するカプセル型医療装置であって、
カプセル形状をなす筐体と、
前記筐体内に設けられた、前記生体情報を取得する生体情報取得手段と、
該生体情報取得手段が取得した生体情報を無線により体外に送信する通信手段と、
前記筐体の軸線方向の一方の端部側に設けられ、前記生体内の生体組織に対して電気を流すための少なくとも一対の電極と、
これら電極に流す電流を制御する電流制御手段と、
前記電極同士の間の距離を可変とする電極間距離可変手段と、
が備えられ、
前記電極間距離可変手段は、基端側を前記筐体に支持されて該筐体から外方へ向かって突出し、先端側で前記電極を支持する可撓性電線とされていることを特徴とするカプセル型医療装置。 - 前記電極間距離可変手段によって変化される電極間距離の最大値が、前記筐体の外径の略2倍以上とされていることを特徴とする請求項1に記載のカプセル型医療装置。
- 前記電極が、ステンレス、プラチナ、チタンのうちの少なくとも一の材料から構成されていることを特徴とする請求項1又は請求項2に記載のカプセル型医療装置。
- 前記筐体の軸線方向の他方の端部側であって前記生体情報取得手段以外の部分に設けられ、前記生体組織に対して電気を流すための少なくとも一対の第2の電極と、
これら第2の電極に流す電流を制御する第2の電流制御手段と、
前記第2の電極同士の間の距離を可変とする第2の電極間距離可変手段と、
が備えられていることを特徴とする請求項1〜3の何れかに記載のカプセル型医療装置。 - 前記可撓性電線が横幅のある帯状電線とされ、前記電極が前記帯状電線と略同幅の横長電極とされていることを特徴とする請求項1に記載のカプセル型医療装置。
- 前記可撓性電線が、前記基端側から先端側の前記電極へと電流を流す導電性線材と、該導電性線材を絶縁被覆する絶縁被覆材とからなり、前記導電性線材と前記絶縁被覆材とのうちの何れかあるいは双方が可撓性及び弾性を有する構成とされていることを特徴とする請求項1又は請求項5に記載のカプセル型医療装置。
- 前記可撓性電線が、超弾性合金あるいは超弾性高分子材料のうちの何れかあるいは双方により構成されていることを特徴とする請求項1、請求項5又は請求項6の何れかに記載のカプセル型医療装置。
- 前記可撓性電線の先端側同士を結束し、生体内で溶解する電線結束手段が設けられていることを特徴とする請求項1又は請求項5〜7の何れかに記載のカプセル型医療装置。
- 前記電極が、前記筐体の周方向に沿って一対よりも多数設けられるとともに、
前記電流制御手段からの電流を流す電極を前記多数の電極のうちから選択する電極セレクタが備えられていることを特徴とする請求項1〜8の何れかに記載のカプセル型医療装置。 - 前記電極セレクタは、前記多数の電極のうちから各極毎に複数を任意に選択し、前記生体組織に対して電気を流すための電極の面積を各極毎に変化させる電極面積可変手段とされていることを特徴とする請求項9に記載のカプセル型医療装置。
- 前記可撓性電線を前記筐体の内部に収納する電線収納部が設けられていることを特徴とする請求項1又は請求項5〜8の何れかに記載のカプセル型医療装置。
- 前記電線収納部が、前記筐体の外周にわたって形成されている、前記可撓性電線を収納する溝とされていることを特徴とする請求項11に記載のカプセル型医療装置。
- 前記可撓性電線が、形状記憶材料により構成されているとともに、該可撓性電線の基端側は、前記電線収納部内に回転自在に支持された回転軸に連結されていることを特徴とする請求項11に記載のカプセル型医療装置。
- 前記電極が生体組織に電気刺激を与える電気刺激手段であることを特徴とする請求項1〜13のいずれかに記載のカプセル型医療装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004261015A JP4593211B2 (ja) | 2004-09-08 | 2004-09-08 | カプセル型医療装置 |
| CN200580036822A CN100594837C (zh) | 2004-09-08 | 2005-09-08 | 囊型医疗装置 |
| KR1020077007677A KR101048916B1 (ko) | 2004-09-08 | 2005-09-08 | 캡슐형 의료 장치 |
| PCT/JP2005/016999 WO2006028281A1 (en) | 2004-09-08 | 2005-09-08 | Capsule type medical device |
| EP05783591.0A EP1796529B1 (en) | 2004-09-08 | 2005-09-08 | Capsule type medical device |
| US11/714,495 US8257257B2 (en) | 2004-09-08 | 2007-03-06 | Capsule type medical device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004261015A JP4593211B2 (ja) | 2004-09-08 | 2004-09-08 | カプセル型医療装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006075269A JP2006075269A (ja) | 2006-03-23 |
| JP2006075269A5 JP2006075269A5 (ja) | 2007-09-20 |
| JP4593211B2 true JP4593211B2 (ja) | 2010-12-08 |
Family
ID=36155217
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004261015A Expired - Fee Related JP4593211B2 (ja) | 2004-09-08 | 2004-09-08 | カプセル型医療装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4593211B2 (ja) |
| CN (1) | CN100594837C (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4805056B2 (ja) * | 2006-08-02 | 2011-11-02 | オリンパス株式会社 | 被検体内導入装置、体外受信装置、及び被検体内情報収集システム |
| EP2051625B1 (en) | 2006-08-03 | 2019-07-17 | Christoph Scharf | Method and device for determining and presenting surface charge and dipole densities on cardiac walls |
| CN101516250B (zh) * | 2006-09-22 | 2011-05-04 | 奥林巴斯医疗株式会社 | 胶囊型内窥镜以及胃内部观察方法 |
| WO2009090547A2 (en) | 2008-01-17 | 2009-07-23 | Christoph Scharf | A device and method for the geometric determination of electrical dipole densities on the cardiac wall |
| JP2009247690A (ja) * | 2008-04-08 | 2009-10-29 | Nippon Telegr & Teleph Corp <Ntt> | 便意通知器および便意検知装置 |
| JP2009270901A (ja) * | 2008-05-07 | 2009-11-19 | Yoichi Kaneko | パッシブrfidタグの三次元位置を高精度に計測する方法 |
| UA109424C2 (uk) * | 2009-12-02 | 2015-08-25 | Фармацевтичний продукт, фармацевтична таблетка з електронним маркером і спосіб виготовлення фармацевтичної таблетки | |
| CA2829626C (en) | 2011-03-10 | 2020-06-16 | Acutus Medical, Inc. | Device and method for the geometric determination of electrical dipole densities on the cardiac wall |
| CN102274580A (zh) * | 2011-05-16 | 2011-12-14 | 梁志伟 | 电刺激治疗仪及其应用方法 |
| CN104812297B (zh) | 2012-08-31 | 2017-05-17 | 阿库图森医疗有限公司 | 导管系统及其医疗使用方法,包括心脏的诊断和治疗使用 |
| WO2014124231A1 (en) * | 2013-02-08 | 2014-08-14 | Acutus Medical, Inc. | Expandable catheter assembly with flexible printed circuit board |
| CN103222844B (zh) * | 2013-04-25 | 2016-01-27 | 中国人民解放军成都军区总医院 | 可控胶囊内镜 |
| JP6681332B2 (ja) | 2013-09-13 | 2020-04-15 | アクタス メディカル インクAcutus Medical,Inc. | 心臓表面での電気双極子密度の判断のための装置および方法 |
| US11278231B2 (en) | 2014-03-25 | 2022-03-22 | Acutus Medical, Inc. | Cardiac analysis user interface system and method |
| EP3294122A4 (en) | 2015-05-12 | 2018-10-31 | Acutus Medical Inc. | Ultrasound sequencing system and method |
| JP6526519B2 (ja) * | 2015-08-18 | 2019-06-05 | 英敏 太田 | 消化器管内観察装置 |
| CN110191667B (zh) * | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| CN117224171A (zh) * | 2018-10-19 | 2023-12-15 | 安翰科技(武汉)股份有限公司 | 采样胶囊及采样胶囊系统、控制方法 |
| CN109009247B (zh) * | 2018-10-19 | 2023-09-08 | 安翰科技(武汉)股份有限公司 | 采样胶囊及采样胶囊系统 |
| CN116392130B (zh) * | 2023-06-07 | 2023-09-08 | 广州思德医疗科技有限公司 | 一种食管测压装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001008548A1 (en) * | 1999-08-03 | 2001-02-08 | The University College London Hospitals Nhs Trust | Improved passage-travelling device |
| JP2003284784A (ja) * | 2001-11-09 | 2003-10-07 | Ethicon Endo Surgery Inc | 薬剤アプリケータを備えた自走式腔内装置及びその使用方法 |
| JP2003299613A (ja) * | 2001-11-09 | 2003-10-21 | Ethicon Endo Surgery Inc | 処理用経路を備えた自走式腔内装置及びその使用方法 |
| JP2005185644A (ja) * | 2003-12-26 | 2005-07-14 | Olympus Corp | カプセル型医療装置システム |
| JP2007521938A (ja) * | 2004-02-17 | 2007-08-09 | コリア インスティテュート オブ サイエンス アンド テクノロジー | 移動運動システムが設けられた遠隔操作内視鏡カプセル |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1902663A4 (en) * | 2005-07-08 | 2009-12-16 | Olympus Medical Systems Corp | APPARATUS FOR POSITIONING A CAPSULE-TYPE MEDICAL DEVICE, APPARATUS FOR POSITIONING A CAPSULE-TYPE ENDOSCOPE IN THE BODY, AND CAPSULE-TYPE MEDICAL DEVICE FOR POSITIONING |
-
2004
- 2004-09-08 JP JP2004261015A patent/JP4593211B2/ja not_active Expired - Fee Related
-
2005
- 2005-09-08 CN CN200580036822A patent/CN100594837C/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001008548A1 (en) * | 1999-08-03 | 2001-02-08 | The University College London Hospitals Nhs Trust | Improved passage-travelling device |
| JP2003284784A (ja) * | 2001-11-09 | 2003-10-07 | Ethicon Endo Surgery Inc | 薬剤アプリケータを備えた自走式腔内装置及びその使用方法 |
| JP2003299613A (ja) * | 2001-11-09 | 2003-10-21 | Ethicon Endo Surgery Inc | 処理用経路を備えた自走式腔内装置及びその使用方法 |
| JP2005185644A (ja) * | 2003-12-26 | 2005-07-14 | Olympus Corp | カプセル型医療装置システム |
| JP2007521938A (ja) * | 2004-02-17 | 2007-08-09 | コリア インスティテュート オブ サイエンス アンド テクノロジー | 移動運動システムが設けられた遠隔操作内視鏡カプセル |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100594837C (zh) | 2010-03-24 |
| CN101048100A (zh) | 2007-10-03 |
| JP2006075269A (ja) | 2006-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4593211B2 (ja) | カプセル型医療装置 | |
| EP1796529B1 (en) | Capsule type medical device | |
| Mapara et al. | Medical capsule robots: A renaissance for diagnostics, drug delivery and surgical treatment | |
| Ciuti et al. | Frontiers of robotic endoscopic capsules: a review | |
| JP4094543B2 (ja) | カプセル型医療装置システム | |
| Ciuti et al. | Capsule endoscopy: from current achievements to open challenges | |
| Munoz et al. | A review of drug delivery systems for capsule endoscopy | |
| Moglia et al. | Wireless capsule endoscopy: from diagnostic devices to multipurpose robotic systems | |
| US9149172B2 (en) | System and apparatus for anchoring and operation of in-vivo medical devices | |
| JP4611320B2 (ja) | 移動運動システムが設けられた遠隔操作内視鏡カプセル | |
| US8449452B2 (en) | In-vivo sensing system | |
| JP4231657B2 (ja) | カプセル型医療装置 | |
| JP4578740B2 (ja) | カプセル型医療装置 | |
| Moglia et al. | Recent patents on wireless capsule endoscopy | |
| EP2163206A1 (en) | Surgical clip delivering wireless capsule | |
| JP2004041709A (ja) | カプセル医療装置 | |
| Wang et al. | Perspective of active capsule endoscope: actuation and localisation | |
| WO2017161200A1 (en) | Targeting systems for providing accurate placement of magnetic anastomosis devices | |
| Menciassi et al. | Single and multiple robotic capsules for endoluminal diagnosis and surgery | |
| US20210060296A1 (en) | Miniaturized intra-body controllable medical device | |
| WO2005087079A1 (ja) | 被検体内導入装置 | |
| US7727169B1 (en) | Device for in vivo sensing | |
| JP5963158B2 (ja) | 自走式カプセル内視鏡 | |
| JP4642424B2 (ja) | 体内医療装置 | |
| US20220338892A1 (en) | Miniaturized intra-body controllable medical device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070731 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070731 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20070801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100615 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100806 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100810 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100915 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |