JP4334301B2 - 階層型構成要素ベースの物体認識 - Google Patents
階層型構成要素ベースの物体認識 Download PDFInfo
- Publication number
- JP4334301B2 JP4334301B2 JP2003306847A JP2003306847A JP4334301B2 JP 4334301 B2 JP4334301 B2 JP 4334301B2 JP 2003306847 A JP2003306847 A JP 2003306847A JP 2003306847 A JP2003306847 A JP 2003306847A JP 4334301 B2 JP4334301 B2 JP 4334301B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- components
- calculating
- search
- pose
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 claims abstract description 68
- 230000033001 locomotion Effects 0.000 claims abstract description 17
- 238000011524 similarity measure Methods 0.000 claims abstract description 11
- 230000008859 change Effects 0.000 claims description 22
- 238000000354 decomposition reaction Methods 0.000 claims description 15
- 239000011159 matrix material Substances 0.000 claims description 12
- 238000005457 optimization Methods 0.000 claims description 6
- 238000007619 statistical method Methods 0.000 claims 1
- 238000012986 modification Methods 0.000 abstract description 4
- 230000004048 modification Effects 0.000 abstract description 4
- 238000010200 validation analysis Methods 0.000 abstract 1
- 238000004364 calculation method Methods 0.000 description 10
- 238000004422 calculation algorithm Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 238000007689 inspection Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012821 model calculation Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000003908 quality control method Methods 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000002591 computed tomography Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000003706 image smoothing Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000001404 mediated effect Effects 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/42—Global feature extraction by analysis of the whole pattern, e.g. using frequency domain transformations or autocorrelation
- G06V10/422—Global feature extraction by analysis of the whole pattern, e.g. using frequency domain transformations or autocorrelation for representing the structure of the pattern or shape of an object therefor
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/28—Determining representative reference patterns, e.g. by averaging or distorting; Generating dictionaries
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/754—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries involving a deformation of the sample pattern or of the reference pattern; Elastic matching
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/772—Determining representative reference patterns, e.g. averaging or distorting patterns; Generating dictionaries
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- General Engineering & Computer Science (AREA)
- Image Analysis (AREA)
Description
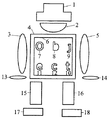
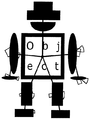
本発明の第1のステップでは、物体は初めに小さな構成要素に解体される。これは、自動的またはユーザによって対話的に実行することができる。初期分解が満たさなければならない条件は、剛性物体の各部を少なくとも1つの初期構成要素によって表さなければならないということであり、そうでなければアルゴリズムが後でこの構成要素を分割し、剛性の物体各部を自動的に見つけることができない。したがって、全体のセグメント化が好ましい。ただし、非常に小さな初期構成要素は性質が固有でなくなってしまうが、これは後で示すように、本発明によって考量することができる。
初期構成要素モデルの生成
次のステップでは、初期構成要素モデルが算出される。本発明の好ましい実施形態では、初期構成要素モデルを算出し、例示イメージ中で初期構成要素を検索するための認識方法として、R21に示された類似性尺度の実施が使用される。この方法では、従来のほとんどの物体認識方法の実施と同様に、認識速度を上げるために帰納的な粗から精への戦略を使用する。これには、モデルイメージと検索イメージの両方のサブサンプリングと共に、両方のイメージの目盛り空間表現につながる適切なイメージ平滑化が含まれる。ただし、好ましくない目盛り空間効果には注意しなければならない。目盛り空間では、初期構成要素のエッジは隣接するエッジの影響を受ける。大きな物体を取り扱うときには、隣接するエッジの影響を受けない物体のエッジが十分に残されていることから依然として適切なマッチングが可能であるため、ほとんどの場合にこれは重要でない。ただし、初期構成要素などの小さな物体を取り扱うときには、初期構成要素中のエッジピクセルの数と隣接するエッジピクセルの数の比が小さくなる、すなわち隣接するエッジの影響が増加するため、何らかの問題が発生する。図7aおよび7bに、目盛り空間効果の原理が示されている。図7aには、2本のエッジを含む1Dのグレイ値プロファイルが示されている。左側のエッジのみが初期構成要素に属しているため、初期構成要素モデル内に示されるのに対して、右側のエッジは隣接エッジを表している。目盛り空間では、隣接エッジによって生じるモデルエッジの妨害が平滑化の度合いに応じて増加する(シグマ)。この問題は、認識方法で目盛り空間表現が使用されなければ避けることができる。ただし、その場合には計算時間の増加につながるので好ましくない。したがって、隣接する妨害エッジをなくすために、初期構成要素エッジの両側のグレイ値が人工的に周囲の領域に連続される。すべての妨害エッジをなくすために、適切な周囲の領域サイズを選択しなければならない。たとえば、2つの連続する打切りステップ内で4つの隣接ピクセルが1つにマージングされる、ステップの合計数がlの方法で、目盛り空間打切りが使用される場合、すべての隣接エッジからの影響を完全になくすために、初期構成要素エッジの両側のグレイ値は、少なくとも2lピクセルずつ連続させなければならない。その結果が図7bに示されている。これでモデルエッジは隣接エッジに妨害されなくなる。他のより高度な方法では、エッジを明示的にモデリングし、その後エッジの周囲でグレイ値を再構築する(R10)。これらは本発明に容易に組み込むことができる。
初期構成要素モデルの検索
初期構成要素モデルは、選択された認識方法を使用して各例示イメージで初期構成要素を検索するのに使用される。こうして、各例示イメージ中の各構成要素iのすべてのポーズPiが取得される。好ましい実施形態では、位置とは、たとえば初期構成要素内のエッジピクセルの重心などの初期構成要素モデルの任意の基準点のことである。向きとは、モデルイメージ中の初期構成要素の向きのことであり、すなわちモデルイメージ中の各初期構成要素の向きは0°である。ポーズPiには、隣接エッジを消去した後に構築された初期構成要素モデルを検索する際に取得されたポーズ、ならびにあらかじめ隣接エッジを消去することなく構築された初期構成要素モデルを検索する際に取得されたポーズが含まれる。

最初の2つの制約(数式5および6)は、すべてのxi kが解において値1または値0のいずれかを有すること、すなわち、初期構成要素iのマッチkが解の一部であるかまたは一部でないか、のいずれかであることを保証するものである。第3の制約(数式7)は、各初期構成要素が多くても1つのマッチに割り当てられることを保証するものである。第4の制約(数式8)は、各物理マッチが多くても1つの初期構成要素に割り当てられることを保証するものである。この線形計画法問題は異なるアルゴリズム、たとえばシンプレックス法によって解決することが可能であり、文献から入手可能である(R9、R19)。各例示イメージのあいまいさが個別に解決される。
初期構成要素のクラスタ化
初期分解は全体のセグメント化につながるため、同じ剛性物体部分に属する初期構成要素は、以前のステップで取得されたポーズパラメータを解析することによって、より大きなクラスタにマージしなければならない。すべての例示イメージにわたって同様の見かけの動きを示す初期構成要素は、一緒にクラスタ化される。
物体部分モデルの生成および検索
前述のように、新しくクラスタ化された構成要素に関する認識方法のモデルが作成され、すべての例示イメージ中で検索される。これにより、新しくクラスタ化された構成要素のポーズとして、クラスタ内の各初期構成要素の単一の初期ポーズの平均を取る際に、誤りが生じるのを防ぐことができる。ただし、この情報を活用して、例示イメージ中で新しくクラスタ化された構成要素の基準点および配向角度について概数値を算出することによって、検索スペースを減らすことができる。このステップの後、各剛性物体部分について物体部分モデルが使用可能であり、各イメージ中の各物体部分に関するポーズパラメータが算出される。
物体部分間の関係の算出
クラスタ化された構成要素のポーズパラメータ、すなわち剛性物体部分が解析され、部分iとjの間の2つ1組の関係が導出される(ここではi=1、...、npおよびj=1、...、npであり、npは物体部分の数である)。そのために、各イメージでは物体部分iのポーズがローカル座標系を定義し、この座標系では物体部分jのポーズが算出される。好ましい実施形態では、すべての例示イメージのローカル座標系において物体部分jのすべての向きを囲む角度範囲は、物体部分iを基準にした物体部分jの角度変化を表す。好ましい実施形態では、対応する位置変化は、すべての例示イメージのローカル座標系において物体部分jの基準点の任意の向きの最小の囲み長方形で記述される。任意の向きの最小の囲み長方形と並んで、たとえば、軸に位置合わせされた最小の囲み長方形、凸閉包、最小の囲み円、または2D平面内の点セットの他の任意の記述など、他の記述を代わりに使用することができる。この原理は、図10に例示されている。
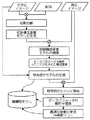
階層型検索ツリーの算出
オンライン段階での本発明の戦略は、選択されたルート物体部分を検索範囲全体にわたって検索し、その後連続して、すでに見つけられた物体部分だけを基準にして残りの部分を検索することである。そのためには、現在の部分が相対的に検索されるすでに見つけられた物体部分のポーズに関して、現在の物体部分の基準点の検索範囲が変換される。検索労力Ωを計算するための数式は、選択された認識方法の計算時間がΩに対応して線形に増加するような方法で構築しなければならない。したがって、オンライン段階での検索時に累積されるΩの合計を最小にして、最適な検索戦略を見つけなければならない。
階層型モデルの検索
本発明に記載されたステップに従ってオフライン段階で階層型モデルが構築されると、これをオンライン段階で任意の検索イメージ中の物体を検索するのに使用することができる。本発明の好ましい実施形態では、閉塞、クラッタ、任意の照度変化、およびセンサノイズに対する強さ、ならびに高い認識精度およびリアルタイムでの計算などの、この類似尺度の特性を利用するために、(Steger、2001)に示された類似尺度を使用して、検索イメージ中の階層型モデルの物体部分モデルが検索される。階層型モデルの同じ見つけられたインスタンスに属するすべての見つけられたモデル部分のポーズは、階層マッチに格納される。
1つの物体部分が見つからない場合、いくつかのストラテジを適用することができる。好ましい実施形態では、検索階層中の見つからない物体部分のすぐ下にある物体部分は、検索階層中で見つからない物体部分のすぐ上にあり、すでに見つかっている物体部分を基準にして検索される。最悪の場合、相対的検索を開始するためにルート物体部分が選択される。本発明の代替実施形態では、検索階層中で見つからない物体部分のすぐ下にある物体部分は、検索労力が最小のすでに見つかっている物体部分を基準にして検索される。本発明の他の代替実施形態では、検索階層中で見つからない物体部分の下にあるすべての物体部分は検索されず、見つからないものとしても扱われない。
Claims (22)
- a)モデルイメージに基づいて構成要素にする初期物体分解を構築するステップと、
b)前記モデルイメージに関して複数の例示イメージ中の前記構成要素の相対ポーズを決定するステップと、
c)複数の構成要素が同一または同様の方法で例示イメージのシーケンスにわたって移動するかどうかを決定し、移動する場合はこうした構成要素をグループ化して、物体部分中のグループ化されていない構成要素と一緒にするステップと、
d)各例示イメージ中の前記グループ化された構成要素の相対ポーズを決定するステップと、
e)(e1)物体部分の各有向対に関する変化尺度を計算するステップと、
(e2)前記変化尺度に基づいて、階層型検索に含まれるすべての変化尺度の全体の合計を最小にする最適化基準を計算するステップと、
(e3)前記最適化基準に基づいて最適な階層型検索を計算するステップと、前記最適階層型検索は、相互の変化尺度を記載したグラフの最低全域樹皮を計算することによって、前記最適化基準に基づいて計算され、
前記(e1)、(e2)、(e3)の各ステップにより、階層の一番上にあるルート物体部分および階層の下位レベルにある複数の物体部分からなる階層型モデルを、物体部分の相対ポーズを考慮に入れる前記最適化基準を使用して、物体部分から形成するステップと、
f)物体部分の各有向対について、第1の物体部分のポーズを基準として第2の物体部分の検索スペースを計算することにより、物体認識段階で使用される物体部分の関連する検索スペースを決定するステップと、前記検索スペースはn次元ポーズスペースにおける全例示イメージにわたるポーズに及び、nはポーズパラメータの数である、
を含む階層型モデルを構築するための方法。 - 前記初期物体分解はユーザによって実行される、請求項1に記載の方法。
- 前記初期物体分解はグループ化方法を使用して自動的に実行される、請求項1に記載の方法。
- 前記イメージエッジの連結構成要素は初期構成要素として使用される、請求項1、2、または3に記載の方法。
- 前記イメージエッジは、少なくともエッジの大きさを提供するエッジオペレータによって計算される、請求項1、2、3、または4に記載の方法。
- 前記エッジオペレータはソーベルオペレータである、請求項5に記載の方法。
- 前記構成要素の相対ポーズを決定するステップは、
ポーズ決定時に隣接する構成要素の影響をなくすステップをさらに含む、請求項1から6のいずれか一項に記載の方法。 - 前記相対ポーズを決定するステップは、
グレイ値相関に基づいた物体認識方法を類似性尺度として使用するステップを含む、請求項1から7のいずれか一項に記載の方法。 - 前記相対ポーズを決定するステップは、
幾何学的特徴に基づいた物体認識方法を類似性尺度として使用するステップを含む、請求項1から8のいずれか一項に記載の方法。 - 前記物体認識方法は一般化ハフ変換に基づくものである、請求項9に記載の方法。
- 前記物体認識方法はエッジ傾斜方向のドット積である、請求項9に記載の方法。
- 前記物体認識方法はハウスドルフ距離に基づくものである、請求項9に記載の方法。
- 最高の確率を有するマッチを選択することによってあいまいなマッチをなくすステップをさらに含む、請求項1から12のいずれか一項に記載の方法。
- 前記モデルイメージに関して例示イメージ中で相対ポーズの最小の変化を発生させるマッチとなる最高の確率を有するマッチが選択される、請求項13に記載の方法。
- 複数の構成要素が同一または同様の方法で例示イメージのシーケンスにわたって移動するかどうかを決定するステップは、
各例示イメージ中の各構成要素対について相対的な動きを計算するステップと、
例示イメージにわたる相対的な動きの統計値(平均、中間、または最大)を計算するステップと、
統計値を含む非類似性行列を計算するステップと、
残りの統計値がユーザ定義の閾値を超えるまで連続して前記非類似性行列をクラスタ化するステップとを含む、請求項1から14のいずれか一項に記載の方法。 - 複数の構成要素が同一または同様の方法で例示イメージのシーケンスにわたって移動するかどうかを決定するステップは、
各例示イメージ中の各構成要素対について相対的な動きを計算するステップと、
統計方法を使用して2つの構成要素が同じ物体部分に属する確率を計算するステップと、
確率を含む類似性行列を計算するステップと、
残りの確率がユーザ定義の閾値よりも下になるまで連続して前記類似性行列をクラスタ化するステップとを含む、請求項1から15のいずれか一項に記載の方法。 - 前記構成要素をグループ化するステップは、
請求項15で計算された同じクラスタに含まれるすべての構成要素をマージングするステップを含む、請求項1から14のいずれか一項に記載の方法。 - 前記構成要素をグループ化するステップは、
請求項16で計算された同じクラスタに含まれるすべての構成要素をマージングするステップを含む、請求項1から14のいずれか一項に記載の方法。 - 前記物体認識段階で使用される物体部分の相対検索スペースを決定するステップは、
物体部分の各有向対について、第1の物体部分のポーズを基準として第2の物体部分の検索スペースを計算するステップを含む、請求項1から18のいずれか一項に記載の方法。 - 前記検索スペースは、n次元のポーズスペース中のすべての例示イメージにわたってポーズの凸閉包であり、nはポーズパラメータの数を表す、請求項1から19いずれか一項に記載の方法。
- 凸閉包を囲む幾何学形状を計算することによって前記検索スペースを拡大するステップをさらに含む、請求項20に記載の方法。
- ユーザ指定の許容範囲によって検索スペースを拡大するステップをさらに含む、請求項20または21に記載の方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP02019162A EP1394727B1 (en) | 2002-08-30 | 2002-08-30 | Hierarchical component based object recognition |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009027572A Division JP5329254B2 (ja) | 2002-08-30 | 2009-02-09 | 階層型構成要素ベースの物体認識 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004094954A JP2004094954A (ja) | 2004-03-25 |
| JP4334301B2 true JP4334301B2 (ja) | 2009-09-30 |
Family
ID=31197829
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003306847A Expired - Lifetime JP4334301B2 (ja) | 2002-08-30 | 2003-08-29 | 階層型構成要素ベースの物体認識 |
| JP2009027572A Expired - Lifetime JP5329254B2 (ja) | 2002-08-30 | 2009-02-09 | 階層型構成要素ベースの物体認識 |
| JP2012178273A Expired - Lifetime JP5330579B2 (ja) | 2002-08-30 | 2012-08-10 | 階層型構成要素ベースの物体認識 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009027572A Expired - Lifetime JP5329254B2 (ja) | 2002-08-30 | 2009-02-09 | 階層型構成要素ベースの物体認識 |
| JP2012178273A Expired - Lifetime JP5330579B2 (ja) | 2002-08-30 | 2012-08-10 | 階層型構成要素ベースの物体認識 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7239929B2 (ja) |
| EP (1) | EP1394727B1 (ja) |
| JP (3) | JP4334301B2 (ja) |
| AT (1) | ATE528724T1 (ja) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7016539B1 (en) | 1998-07-13 | 2006-03-21 | Cognex Corporation | Method for fast, robust, multi-dimensional pattern recognition |
| ATE528724T1 (de) * | 2002-08-30 | 2011-10-15 | Mvtec Software Gmbh | Auf hierarchischen gliedern basierte erkennung von gegenständen |
| US8081820B2 (en) | 2003-07-22 | 2011-12-20 | Cognex Technology And Investment Corporation | Method for partitioning a pattern into optimized sub-patterns |
| US7190834B2 (en) | 2003-07-22 | 2007-03-13 | Cognex Technology And Investment Corporation | Methods for finding and characterizing a deformed pattern in an image |
| US20060030985A1 (en) * | 2003-10-24 | 2006-02-09 | Active Recognition Technologies Inc., | Vehicle recognition using multiple metrics |
| US20050140696A1 (en) * | 2003-12-31 | 2005-06-30 | Buxton William A.S. | Split user interface |
| JP4483334B2 (ja) * | 2004-02-18 | 2010-06-16 | 富士ゼロックス株式会社 | 画像処理装置 |
| US20050190659A1 (en) * | 2004-03-01 | 2005-09-01 | Matsushita Electric Industrial Co., Ltd. | Audio reproducing apparatus |
| US7643665B2 (en) * | 2004-08-31 | 2010-01-05 | Semiconductor Insights Inc. | Method of design analysis of existing integrated circuits |
| WO2006036842A2 (en) * | 2004-09-24 | 2006-04-06 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer program products for hierarchical registration between a blood vessel and tissue surface model for a subject and blood vessel and tissue surface image for the subject |
| US8437502B1 (en) | 2004-09-25 | 2013-05-07 | Cognex Technology And Investment Corporation | General pose refinement and tracking tool |
| KR20060066340A (ko) * | 2004-12-13 | 2006-06-16 | 삼성전자주식회사 | 3차원 구조 스케치 제작장치와 방법 및 컴퓨터 프로그램을저장하는 컴퓨터로 읽을 수 있는 기록매체 |
| US7450736B2 (en) * | 2005-10-28 | 2008-11-11 | Honda Motor Co., Ltd. | Monocular tracking of 3D human motion with a coordinated mixture of factor analyzers |
| US7680748B2 (en) * | 2006-02-02 | 2010-03-16 | Honda Motor Co., Ltd. | Creating a model tree using group tokens for identifying objects in an image |
| GB0616293D0 (en) | 2006-08-16 | 2006-09-27 | Imp Innovations Ltd | Method of image processing |
| JP4267648B2 (ja) * | 2006-08-25 | 2009-05-27 | 株式会社東芝 | インターフェース装置及びその方法 |
| US20080082301A1 (en) * | 2006-10-03 | 2008-04-03 | Sabrina Haskell | Method for designing and fabricating a robot |
| US8160364B2 (en) * | 2007-02-16 | 2012-04-17 | Raytheon Company | System and method for image registration based on variable region of interest |
| US7853081B2 (en) * | 2007-04-02 | 2010-12-14 | British Telecommunications Public Limited Company | Identifying data patterns |
| US8331674B2 (en) * | 2007-04-06 | 2012-12-11 | International Business Machines Corporation | Rule-based combination of a hierarchy of classifiers for occlusion detection |
| JP4929109B2 (ja) * | 2007-09-25 | 2012-05-09 | 株式会社東芝 | ジェスチャ認識装置及びその方法 |
| US8103085B1 (en) | 2007-09-25 | 2012-01-24 | Cognex Corporation | System and method for detecting flaws in objects using machine vision |
| EP2048599B1 (en) * | 2007-10-11 | 2009-12-16 | MVTec Software GmbH | System and method for 3D object recognition |
| EP2081133B1 (en) * | 2008-01-18 | 2010-05-19 | MVTec Software GmbH | System and method for deformable object recognition |
| JP5247337B2 (ja) * | 2008-10-02 | 2013-07-24 | キヤノン株式会社 | 画像認識装置および画像認識方法 |
| JP5310234B2 (ja) * | 2009-04-24 | 2013-10-09 | 株式会社日本自動車部品総合研究所 | 画像認識装置 |
| EP2530605A4 (en) | 2010-01-29 | 2013-12-25 | Panasonic Corp | DATA PROCESSING UNIT |
| EP2385483B1 (en) | 2010-05-07 | 2012-11-21 | MVTec Software GmbH | Recognition and pose determination of 3D objects in 3D scenes using geometric point pair descriptors and the generalized Hough Transform |
| US8625887B2 (en) | 2011-07-13 | 2014-01-07 | Google Inc. | Systems and methods for matching visual object components |
| DE102011079187A1 (de) * | 2011-07-14 | 2013-01-17 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtung zur Schritterkennung eines Fußgängers für ein tragbares Endgerät |
| JP5906071B2 (ja) * | 2011-12-01 | 2016-04-20 | キヤノン株式会社 | 情報処理方法、情報処理装置、および記憶媒体 |
| WO2013090819A1 (en) | 2011-12-16 | 2013-06-20 | Boston Scientific Neuromodulation Corporation | System for programming a neurostimulation device with seamless integration programming modes |
| US9111173B2 (en) | 2012-04-23 | 2015-08-18 | Honda Motor Co., Ltd. | Learning part-based models of objects |
| US20130328760A1 (en) * | 2012-06-08 | 2013-12-12 | Qualcomm Incorporated | Fast feature detection by reducing an area of a camera image |
| US9111348B2 (en) * | 2013-03-15 | 2015-08-18 | Toyota Motor Engineering & Manufacturing North America, Inc. | Computer-based method and system of dynamic category object recognition |
| JP6273686B2 (ja) * | 2013-03-29 | 2018-02-07 | 富士通株式会社 | 画像処理装置、画像処理方法および画像処理プログラム |
| US9679224B2 (en) | 2013-06-28 | 2017-06-13 | Cognex Corporation | Semi-supervised method for training multiple pattern recognition and registration tool models |
| US9842274B2 (en) * | 2014-03-28 | 2017-12-12 | Xerox Corporation | Extending data-driven detection to the prediction of object part locations |
| DE102014010982A1 (de) | 2014-07-29 | 2016-02-04 | Sew-Eurodrive Gmbh & Co Kg | Verfahren zur Erkennung eines Objekts in einem Bild und Vorrichtung zur Durchführung des Verfahrens |
| JP2018505505A (ja) * | 2015-01-31 | 2018-02-22 | モファット,ブライアン,リー | 顔の幾何学的形状の歪みによるコンピュータの制御 |
| CN104699244B (zh) * | 2015-02-26 | 2018-07-06 | 小米科技有限责任公司 | 智能设备的操控方法及装置 |
| US9868212B1 (en) * | 2016-02-18 | 2018-01-16 | X Development Llc | Methods and apparatus for determining the pose of an object based on point cloud data |
| JP2019517079A (ja) | 2016-05-24 | 2019-06-20 | モルフォトラスト・ユーエスエー・リミテッド ライアビリティ カンパニーMorphotrust Usa,Llc | 形状検知 |
| CN109923501A (zh) * | 2016-11-01 | 2019-06-21 | 香港科技大学 | 用于设备交互的空中手指指向检测 |
| CN111309955B (zh) * | 2017-02-13 | 2022-06-24 | 哈尔滨理工大学 | 一种面向图像检索的融合方法 |
| EP3404583A1 (en) | 2017-05-19 | 2018-11-21 | MVTec Software GmbH | System and method for model adaptation |
| US10460470B2 (en) * | 2017-07-06 | 2019-10-29 | Futurewei Technologies, Inc. | Recognition and reconstruction of objects with partial appearance |
| US10319151B2 (en) | 2017-07-07 | 2019-06-11 | Motorola Solutions, Inc. | Device and method for hierarchical object recognition |
| TWI625680B (zh) | 2017-12-15 | 2018-06-01 | 財團法人工業技術研究院 | 臉部表情辨識的方法及裝置 |
| US10796157B2 (en) * | 2018-03-13 | 2020-10-06 | Mediatek Inc. | Hierarchical object detection and selection |
| JP7098365B2 (ja) * | 2018-03-15 | 2022-07-11 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| WO2019203924A1 (en) * | 2018-04-16 | 2019-10-24 | Exxonmobil Research And Engineering Company | Automation of visual machine part ratings |
| CN111811642B (zh) * | 2020-07-22 | 2022-05-03 | 三一重机有限公司 | 一种挖掘机发动机的故障检测方法及故障检测装置 |
| US20220261406A1 (en) * | 2021-02-18 | 2022-08-18 | Walmart Apollo, Llc | Methods and apparatus for improving search retrieval |
| CN113485240B (zh) * | 2021-07-27 | 2022-07-01 | 华南理工大学 | 基于带标志位分层搜索树的机器人在线焊接路径规划方法 |
| US11941863B2 (en) | 2021-08-04 | 2024-03-26 | Datalogic Ip Tech S.R.L. | Imaging system and method using a multi-layer model approach to provide robust object detection |
| CN113537388B (zh) * | 2021-08-04 | 2023-08-11 | 广州四三九九信息科技有限公司 | 一种基于图层特性的缩放图像模板匹配方法 |
| WO2023168366A2 (en) * | 2022-03-03 | 2023-09-07 | Siemens Healthcare Diagnostics Inc. | Diagnostic laboratory systems and methods of imaging tube assemblies |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5278946A (en) * | 1989-12-04 | 1994-01-11 | Hitachi, Ltd. | Method of presenting multimedia data in a desired form by comparing and replacing a user template model with analogous portions of a system |
| US6075905A (en) * | 1996-07-17 | 2000-06-13 | Sarnoff Corporation | Method and apparatus for mosaic image construction |
| JP3640488B2 (ja) * | 1997-01-17 | 2005-04-20 | 株式会社リコー | 画像処理方法 |
| US6160907A (en) * | 1997-04-07 | 2000-12-12 | Synapix, Inc. | Iterative three-dimensional process for creating finished media content |
| US6396961B1 (en) * | 1997-11-12 | 2002-05-28 | Sarnoff Corporation | Method and apparatus for fixating a camera on a target point using image alignment |
| JPH11185055A (ja) * | 1997-12-24 | 1999-07-09 | Fujitsu Ltd | 動きデータ作成装置およびそのプログラムを格納した記憶媒体 |
| US7003134B1 (en) * | 1999-03-08 | 2006-02-21 | Vulcan Patents Llc | Three dimensional object pose estimation which employs dense depth information |
| ATE528724T1 (de) * | 2002-08-30 | 2011-10-15 | Mvtec Software Gmbh | Auf hierarchischen gliedern basierte erkennung von gegenständen |
-
2002
- 2002-08-30 AT AT02019162T patent/ATE528724T1/de not_active IP Right Cessation
- 2002-08-30 EP EP02019162A patent/EP1394727B1/en not_active Expired - Lifetime
-
2003
- 2003-08-29 US US10/652,360 patent/US7239929B2/en active Active
- 2003-08-29 JP JP2003306847A patent/JP4334301B2/ja not_active Expired - Lifetime
-
2009
- 2009-02-09 JP JP2009027572A patent/JP5329254B2/ja not_active Expired - Lifetime
-
2012
- 2012-08-10 JP JP2012178273A patent/JP5330579B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| ATE528724T1 (de) | 2011-10-15 |
| JP2004094954A (ja) | 2004-03-25 |
| US7239929B2 (en) | 2007-07-03 |
| JP2012212476A (ja) | 2012-11-01 |
| US20040042661A1 (en) | 2004-03-04 |
| EP1394727A1 (en) | 2004-03-03 |
| JP5330579B2 (ja) | 2013-10-30 |
| JP2009104666A (ja) | 2009-05-14 |
| EP1394727B1 (en) | 2011-10-12 |
| JP5329254B2 (ja) | 2013-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4334301B2 (ja) | 階層型構成要素ベースの物体認識 | |
| Yamany et al. | Surface signatures: an orientation independent free-form surface representation scheme for the purpose of objects registration and matching | |
| Zhu et al. | Forms: a flexible object recognition and modelling system | |
| Felzenszwalb et al. | Pictorial structures for object recognition | |
| Sharp et al. | ICP registration using invariant features | |
| Brejl et al. | Object localization and border detection criteria design in edge-based image segmentation: automated learning from examples | |
| Cootes et al. | An introduction to active shape models | |
| Fan | Describing and recognizing 3-D objects using surface properties | |
| US7421098B2 (en) | Facial recognition and the open mouth problem | |
| JP6612822B2 (ja) | モデルを修正するためのシステムおよび方法 | |
| Mamic et al. | Representation and recognition of 3D free-form objects | |
| Zong et al. | A fast and accurate planar-feature-based global scan registration method | |
| Cootes | Model-based methods in analysis of biomedical images | |
| EP0460960A2 (en) | Data processing | |
| Barequet | Using geometric hashing to repair CAD objects | |
| Gu et al. | Coarse-to-fine planar object identification using invariant curve features and B-spline modeling | |
| Jain et al. | 3D object recognition: Representation and matching | |
| Ulrich et al. | Automatic hierarchical object decomposition for object recognition | |
| Bhuiyan et al. | Identification of actors drawn in Ukiyoe pictures | |
| Pitiot et al. | Learning shape correspondence for nD curves | |
| Wimmer et al. | Learning robust objective functions with application to face model fitting | |
| Gavrila et al. | Learning shape models from examples | |
| Adeshina et al. | Automatic Annotation of Radiographs using Random Forest Regression Voting for Building Statistical Models for Skeletal Maturity | |
| Zhang et al. | General Image Matching | |
| CN115311406A (zh) | 一种笔划交互式的人体骨架重建技术 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090527 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090623 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4334301 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130703 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |