JP4328661B2 - Double-sided recording device - Google Patents
Double-sided recording device Download PDFInfo
- Publication number
- JP4328661B2 JP4328661B2 JP2004121651A JP2004121651A JP4328661B2 JP 4328661 B2 JP4328661 B2 JP 4328661B2 JP 2004121651 A JP2004121651 A JP 2004121651A JP 2004121651 A JP2004121651 A JP 2004121651A JP 4328661 B2 JP4328661 B2 JP 4328661B2
- Authority
- JP
- Japan
- Prior art keywords
- recording
- roller
- double
- paper
- sided
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Landscapes
- Registering Or Overturning Sheets (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
- Separation, Sorting, Adjustment, Or Bending Of Sheets To Be Conveyed (AREA)
- Conveyance By Endless Belt Conveyors (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
Description
本発明は、自動反転部で表裏反転される被記録媒体に対する両面記録が可能な両面記録装置に関する。 The present invention relates to a double-sided recording apparatus capable of performing double-sided recording on a recording medium that is turned upside down by an automatic reversing unit.
従来、インクジェット記録装置で自動両面記録を行うものは、いくつかの方式が実施あるいは提案されている。それらは、被記録用紙の表面(おもて面)への記録が終了した後、それまでと搬送方向を逆転して、被記録用紙を表裏反転装置に送り込み、反転動作終了後に再び同じ用紙搬送部にて被記録用紙を搬送し、同じ記録部にて被記録用紙の裏面に記録を行うものである。それらの方式の中で、特開2001−270633や特開2002−059599に開示される発明の如く、紙送りローラの上流側に、自動給紙部及び用紙反転部を配し、両者からの通紙経路が途中で分岐あるいは合流して、紙送りローラ近傍で1つになるように構成されている。
しかしながら、上記従来例においてはいくつかの制約があった。すなわち、特開2002−059599に開示されている発明においては、自動給紙部のサイズの制約により、紙送りローラから用紙反転部へ至る通紙経路が屈曲し、円滑な用紙搬送を妨げる可能性があった。特にインクジェット記録を用いる記録装置においては、被記録用紙に着弾したインクが完全に乾燥する前に通紙経路の壁面等に当接すると、記録済みのインク部分に擦れが生じ、記録結果を汚してしまう可能性があった。また、記録結果を汚さないために、長い乾燥時間が必要になり、スループットが低下してしまう可能性があった。 However, the conventional example has some limitations. In other words, in the invention disclosed in Japanese Patent Laid-Open No. 2002-059599, there is a possibility that the paper feeding path from the paper feed roller to the paper reversing unit is bent due to the size restriction of the automatic paper feeding unit, thereby preventing smooth paper conveyance. was there. Particularly in a recording apparatus using ink jet recording, if the ink landed on the recording paper comes into contact with the wall surface or the like of the paper passing path before it completely dries, the recorded ink portion is rubbed, and the recording result is stained. There was a possibility. Further, in order not to contaminate the recording result, a long drying time is required, and the throughput may be reduced.
また、従来の記録装置では、被記録媒体の厚さや形状により、記録ヘッドと被記録用紙の距離を調整可能なものがあるが、調整は手動によるもので、用紙搬送機構の動作と関連付けられたものではなかった。また、紙送りローラにピンチローラを圧接するばねは支持点を固定されているので、被記録媒体の厚さが変わるとばねの線型性に応じて荷重が変動し、紙送りローラ駆動手段が受ける負荷が変動していた。また、被記録媒体を双方向に搬送するので、被記録媒体の有無を検知する検知レバーの構成が複雑になり、検知位置信頼性が低下する可能性があった。また、被記録用紙を用紙反転部から紙送りローラに再度挟持させる際に、被記録用紙先端部の案内(ガイド)が不十分になり、いわゆるレジストレーション(位置合わせ)が不正確になってしまうことがあった。 In addition, some conventional recording apparatuses can adjust the distance between the recording head and the recording paper depending on the thickness and shape of the recording medium. It was not a thing. Further, since the support point of the spring that presses the pinch roller against the paper feed roller is fixed, when the thickness of the recording medium changes, the load fluctuates according to the linearity of the spring, and the paper feed roller driving means receives it. The load was fluctuating. Further, since the recording medium is conveyed in both directions, the configuration of the detection lever for detecting the presence or absence of the recording medium becomes complicated, and the detection position reliability may be lowered. Further, when the recording paper is sandwiched again from the paper reversing portion to the paper feed roller, the leading edge of the recording paper becomes insufficient, and so-called registration (positioning) becomes inaccurate. There was a thing.
本発明はこのような技術的課題に鑑みてなされたものであり、本発明の目的は、給送手段から被記録媒体を給送するときには搬送ローラまで安定して被記録媒体を搬送することができ、被記録媒体を反転部へ搬送するときには被記録媒体を容易に案内することができ、記録済みの面が通紙パスに当接せず記録結果を汚すことがない両面記録装置を提供することである。 The present invention has been made in view of such a technical problem, and an object of the present invention is to stably convey a recording medium to a conveyance roller when the recording medium is fed from a feeding unit. A double-sided recording apparatus capable of easily guiding a recording medium when transporting the recording medium to a reversing unit and preventing a recorded surface from coming into contact with a paper passing path and contaminating a recording result. That is.
本発明は、上記目的を達成するため、被記録媒体を給送する給送手段と、被記録媒体を記録部に搬送する搬送ローラと、前記搬送ローラと協働して被記録媒体を挟持するピンチローラと、前記記録部の下流側で被記録媒体を搬送する排紙ローラと、前記搬送ローラによって前記記録部とは反対の方向に搬送された被記録媒体の表裏を反転して前記搬送ローラに搬送する反転部と、前記給送手段から給送される被記録媒体を前記搬送ローラに向けて案内する第1搬送路と、前記第1搬送路の下方に配置され、前記反転部から搬送されてくる被記録媒体を前記搬送ローラに向けて案内する第2搬送路と、を備え、前記給送手段または前記反転部から搬送される被記録媒体の先端を前記搬送ローラと前記ピンチローラのニップに突き当てることにより斜行補正する両面記録装置であって、前記給送手段から前記第1搬送路に案内されて搬送される被記録媒体、または前記反転部から前記第2搬送路によって案内されて搬送される被記録媒体を前記ニップに該ニップよりも高い位置から案内する第1のポジションと、前記搬送ローラによって搬送される被記録媒体を前記第2搬送路に案内する前記第1ポジションよりも低い第2のポジションとに移動可能なガイド部材と、を有し、前記記録部により被記録媒体の表面に記録を行った後、前記搬送ローラと前記ピンチローラとが離間した状態で前記被記録媒体の後端が前記搬送ローラと前記ピンチローラとの間を通過するように前記排紙ローラによって前記被記録媒体を前記反対方向に搬送し、その後前記搬送ローラと前記ピンチローラとで前記被記録媒体を挟持して前記反転部に向けて搬送することを特徴とする。 In order to achieve the above object, the present invention sandwiches a recording medium in cooperation with the feeding means for feeding the recording medium, a conveyance roller for conveying the recording medium to a recording unit, and the conveyance roller. A pinch roller; a paper discharge roller that conveys the recording medium downstream of the recording unit; and the conveyance roller that reverses the front and back of the recording medium conveyed in the direction opposite to the recording unit by the conveying roller A reversing unit that conveys the recording medium, a first conveyance path that guides the recording medium fed from the feeding unit toward the conveyance roller, and a conveyance unit that is disposed below the first conveyance path and is conveyed from the reversing unit. A second conveyance path for guiding the recording medium to be conveyed toward the conveyance roller, and a leading end of the recording medium conveyed from the feeding unit or the reversing unit is arranged between the conveyance roller and the pinch roller. By hitting the nip A both-side recording apparatus for skew correction, the conveyed is guided by the feed of the recording medium is conveyed by being guided by the first conveying path from the means or the second conveying path from the reversing unit, A first position for guiding the recording medium to the nip from a position higher than the nip, and a second position lower than the first position for guiding the recording medium conveyed by the conveying roller to the second conveying path. A guide member movable to a position, and after recording on the surface of the recording medium by the recording unit, the rear end of the recording medium in a state where the conveying roller and the pinch roller are separated from each other Transports the recording medium in the opposite direction by the paper discharge roller so as to pass between the transport roller and the pinch roller, and then the transport roller and the pinch roller Serial characterized by conveyed to the reversing portion by sandwiching the recording medium.
本発明に係る両面記録装置によれば、給送手段から被記録媒体を給送するときには搬送ローラまで安定して被記録媒体を搬送することができ、被記録媒体を反転部へ搬送するときには被記録媒体を容易に案内することができ、記録済みの面が通紙パスに当接せず記録結果を汚すことがない両面記録装置が提供される。 According to the double-sided recording apparatus of the present invention, the recording medium can be stably conveyed to the conveying roller when the recording medium is fed from the feeding means, and the recording medium is conveyed when the recording medium is conveyed to the reversing unit. Provided is a double-sided recording apparatus that can easily guide a recording medium and that does not make a recorded surface contact a paper passing path and contaminate a recording result.
以下、図面を参照して本発明の実施の形態を具体的に説明する。なお、各図面を通して同一符号は同一又は対応部分を示すものである。図1は本発明を適用した記録装置の一実施形態の全体構成を示す模式的斜視図であり、図2は図1中の矢印A方向から見て一実施形態に係る記録装置の全体構成を示す模式的側断面図である。なお、図1及び図2に示す記録装置は、インクを吐出して被記録媒体に記録を行うインクジェット記録装置である場合を示している。また、以下の説明では、被記録用紙(記録用紙)は被記録媒体の代表例であることから、広義の被記録媒体を用いるべきところを被記録用紙又は用紙ということがあるが、これは被記録媒体の範囲を用紙(記録用紙)に制限するものではない。 Embodiments of the present invention will be specifically described below with reference to the drawings. Note that the same reference numerals denote the same or corresponding parts throughout the drawings. FIG. 1 is a schematic perspective view showing the overall configuration of an embodiment of a recording apparatus to which the present invention is applied. FIG. 2 shows the overall configuration of the recording apparatus according to the embodiment as viewed from the direction of arrow A in FIG. It is a typical sectional side view shown. Note that the recording apparatus shown in FIGS. 1 and 2 shows a case where the recording apparatus is an inkjet recording apparatus that performs recording on a recording medium by discharging ink. In the following description, since the recording paper (recording paper) is a typical example of the recording medium, the place where the recording medium in a broad sense should be used is sometimes referred to as recording paper or paper. The range of the recording medium is not limited to paper (recording paper).
図1及び図2において、1は記録ユニット本体、2は自動両面ユニット(用紙反転部、自動反転部)、10は記録ユニット本体1の構造を支えるシャーシ、11はインクを吐出して記録を行う記録ヘッド、12は記録ヘッド11へ供給するインクを蓄えるインクタンク、13は記録ヘッド11及びインクタンク12を保持して走査(主走査)するためのキャリッジ、14はキャリッジ13を案内支持するガイドシャフト、15はガイドシャフト14と平行にキャリッジ13を案内支持するガイドレール、16はキャリッジ13を駆動するためのキャリッジベルト(タイミングベルト)、17はプーリを介してキャリッジベルト16を駆動するキャリッジモータ、18はキャリッジ13の位置を検出するためのコードストリップ、20はキャリッジモータ17のプーリと対向してキャリッジベルト16を張架するアイドラプーリである。
1 and 2, 1 is a recording unit main body, 2 is an automatic duplex unit (paper reversing unit, automatic reversing unit), 10 is a chassis that supports the structure of the recording unit
21は被記録媒体(被記録用紙)を搬送する紙送りローラ、22は紙送りローラ21に押圧されて従動するピンチローラ、23はピンチローラ22を回転可能に保持するピンチローラホルダ、24はピンチローラ22を紙送りローラ21に圧接するピンチローラばね、25は紙送りローラ21に固定された紙送りローラプーリ、26は紙送りローラ21を駆動するためのLFモータ、27は紙送りローラ21の回転角度を検出するためのコードホイール、29は記録ヘッド11に対向して被記録用紙を支えるプラテンである。
21 is a paper feed roller that conveys a recording medium (recording paper), 22 is a pinch roller that is pressed and driven by the
30は紙送りローラ21と協働して被記録媒体を搬送するための第1排紙ローラ、31は第1排紙ローラ30の下流側に設けられた第2排紙ローラ、32は第1排紙ローラ30に対向して被記録媒体を保持する回転体としての第1拍車列、33は第2排紙ローラ31と対向して被記録媒体を保持する回転体としての第2拍車列、34は第1拍車列32と第2拍車列33を回転可能に保持する拍車ベース、36は記録ヘッド11の目詰まり(吐出口やノズルの目詰まり)を防止してインク吐出性能を維持回復したり、インクタンク12を交換する時に記録ヘッドのインク流路にインクを行き渡らせたりする際に作動させるメインテナンスユニット、37は被記録媒体を積載し記録動作時に1枚ずつ記録部へ供給する自動給紙部としてのメインASF(AutomaticSheetFeeder) である。
図1及び図2において、38はメインASF37の土台となるASFベース、39は積載された被記録媒体(被記録用紙)に当接し搬送を行う給紙ローラ、40は複数枚の被記録媒体が同時に搬送された時に1枚ずつに分離する分離ローラ、41は被記録媒体を積載し給紙ローラ39へ向けて付勢するための圧板、42は圧板41上に設けられ被記録媒体の幅方向の任意の位置で固定可能なサイドガイド、43は給紙動作時に給紙ローラ39と分離ローラ40のニップ部より先に進んでしまった被記録媒体(被記録用紙)の先端を所定位置まで戻すための戻し爪、44はメインASF37からの被記録媒体通紙方向を1方向に規制するASFフラップである。
1 and 2,
50はASF遊星ギア49と契合するリフト入力ギア、51はリフト入力ギア50からの動力を減速しつつ伝達するリフト減速ギア列、52はリフトカム軸に直結したリフトカムギア、55はガイドシャフト14を片寄せに付勢するためのガイドシャフトばね、56はガイドシャフトギア53のカムが摺動するガイド斜面、58はピンチローラホルダ23等をリフトさせるリフトカム軸、70は被記録媒体の先端を紙送りローラ21とピンチローラ22のニップ部へガイドするための通紙ガイド、72は記録ユニット本体1の全体を支持するベース、301は制御部をまとめる制御基板である。
50 is a lift input gear engaged with the ASF
図21は本発明を適用した記録装置全体を駆動する駆動手段を表すブロック図である。図21において、19はキャリッジ13に搭載されコードストリップ18を読み取るCR(キャリッジ)エンコーダセンサ、28はシャーシ1に取り付けられたコードホイール27を読み取るLFエンコーダセンサ、46はメインASF37を駆動するASFモータ、67はPEセンサレバー66の動作を検知するPEセンサ、69はリフトカム軸58の動作を検知するリフトカムセンサ、130は自動両面ユニット2の着脱を検知する両面ユニットセンサである。
FIG. 21 is a block diagram showing driving means for driving the entire recording apparatus to which the present invention is applied. In FIG. 21, 19 is a CR (carriage) encoder sensor mounted on the
図21において、302はメインテナンスユニット36を駆動するPGモータ、303はメインテナンスユニット36の動作を検知するPGセンサ、305はメインASF37の動作を検知するASFセンサ、307は記録ヘッド11を駆動するヘッドドライバ、308は記録データを本記録装置に送るホスト装置、309はホスト装置308と本記録装置を電気的に接続する仲立ちをするI/F(インターフェース)、310は本記録装置の制御を司り制御指令を出すCPU、311は制御データなどが書き込まれたROM、312は記録データ等を展開する領域となるRAMである。
In FIG. 21, 302 is a PG motor that drives the
ここで、図1、図2及び図21を参照して、本発明の一実施形態に係る記録装置の概略を説明し、その後に各部の動作について説明する。先ず、一般的なシリアル走査型の記録装置の構成について説明する。本実施形態に係る記録装置は、大きく分けて、給紙部、被記録媒体搬送部(用紙搬送部)、記録部、記録手段(記録ヘッド)メインテナンス部、並びに自動反転部(自動両面ユニット部)から構成されている。ホスト装置308から記録データが送られ、インターフェース(I/F)309を介してRAM312上にデータを格納すると、CPU310が記録動作開始指令を出して記録動作が開始する。
Here, with reference to FIG. 1, FIG. 2 and FIG. 21, an outline of a recording apparatus according to an embodiment of the present invention will be described, and then the operation of each unit will be described. First, the configuration of a general serial scanning type printing apparatus will be described. The recording apparatus according to the present embodiment is roughly divided into a paper feeding unit, a recording medium conveying unit (paper conveying unit), a recording unit, a recording unit (recording head) maintenance unit, and an automatic reversing unit (automatic duplex unit unit). It is composed of When recording data is sent from the
記録が開始すると、先ず給紙動作が行われる。給紙部はメインASF(AutomaticSheetFeeder) であり、この給紙部は、圧板41上に複数枚積載された被記録媒体(被記録用紙)から記録動作ごとに1枚ずつの被記録媒体を引き出して被記録媒体搬送部(用紙搬送部)に送る自動給紙部で構成されている。給紙動作開始でASFモータ46が正方向に回転し、その動力はギア列を経て圧板41を保持しているカムを回転させる。ASFモータ46の回転によってカムが外れると、圧板41は不図示の圧板ばねの作用により給紙ローラ39に向けて付勢される。同時に、給紙ローラ39が被記録媒体(用紙)を搬送する方向に回転するため、積載された被記録媒体の一番上の一枚の搬送が開始される。その際、給紙ローラ39と被記録用紙との間の摩擦力、並びに被記録用紙同士の摩擦力の条件により、複数枚の被記録用紙が同時に送り出されてしまうことがある。
When recording starts, a paper feeding operation is first performed. The paper feeding unit is a main ASF (Automatic Sheet Feeder), and this paper feeding unit pulls out one recording medium from each recording medium (recording paper) stacked on the
その場合には、給紙ローラ39に圧接されかつ被記録用紙搬送方向と逆方向に所定の戻り回転トルクを有する分離ローラ40が作用し、この分離ローラ40は最も給紙ローラ39側にある被記録用紙以外の被記録用紙を元の圧板上へ押し戻す働きをする。また、ASF給紙動作終了時には、カムの動作により分離ローラ40は給紙ローラ39との圧接状態から解除され、所定の距離離間されるが、その際に確実に圧板上の所定位置まで被記録用紙を押し戻すために、戻し爪43が回転してその役割を果たす。以上のような動作により、被記録用紙を1枚だけ用紙搬送部へ搬送する。
In that case, a separation roller 40 is pressed against the
なお、メインASF37から1枚の被記録用紙が搬送されていく時、被記録用紙の先端は、ASFフラップばねで通紙経路を妨げる方向に付勢されているASFフラップ44に当接するが、ASFフラップ44を押し退けて通過する。被記録用紙の記録動作が終了し、被記録用紙後端がASFフラップ44を通過すると、ASFフラップ44は元の付勢状態に戻って通紙経路が閉ざされるので、被記録用紙が逆方向に搬送されてもメインASF37側に戻ることはない。
When one sheet of recording paper is conveyed from the
給紙部から給送された被記録用紙は、紙送りローラ21とピンチローラ22のニップ部に向けて搬送される。ピンチローラ22の中心は、紙送りローラ21の中心に対して、第1排紙ローラ30に近づく方向の若干のオフセットを持って取り付けられているので、被記録用紙が挿入される接線方向角度は水平より若干傾いている。よって、用紙先端が的確にニップ部にガイドされるように、ピンチローラホルダ23とガイド部材(通紙ガイド)70により形成される通紙経路で角度を付けて被記録用紙を搬送するようにしている。
The recording paper fed from the paper feed unit is conveyed toward the nip portion between the
ASF37によって搬送(送給)される用紙は、停止状態の紙送りローラ21のニップ部に突き当てられる。この時、所定の通紙経路長よりもやや長い距離分をメインASF37で搬送することにより、給紙ローラ39と紙送りローラ21の間で用紙のループが形成される。このループが真っ直ぐに戻ろうとする力で用紙先端が紙送りローラ21のニップ部に押圧されることにより、用紙先端が紙送りローラ21に倣って平行になり、いわゆるレジストレーション取り動作が完了する。レジストレーション取り動作が完了した後、被記録用紙が正方向(第1排紙ローラ30に向けて進行していく方向)に移動する方向に、LFモー(搬送モータ)タ26を回転開始させる。その後、給紙ローラ39は駆動力を切断され、被記録用紙と連れ回りするようになる。この時点で、被記録用紙は紙送りローラ21とピンチローラ22のみで搬送されるようになる。用紙は所定改行量毎に正方向に前進し、プラテン29に設けられたリブに沿って進行する。
The sheet conveyed (supplied) by the
用紙先端は漸次第1排紙ローラ30及び第1拍車列32のニップ部と、第2排紙ローラ31及び第1拍車列33のニップ部に掛かるが、第1排紙ローラ30と第2排紙ローラ31の周速は紙送りローラ21の周速とほぼ等しく設定され、かつ紙送りローラ21から第1排紙ローラ30及び第2排紙ローラ31はギア列で接続されているので、第1排紙ローラ30及び第2排紙ローラ31は紙送りローラ21と同期して回転することになり、そのため、被記録用紙は弛んだり引っ張られたりすることなく搬送される。紙送りローラ(用紙搬送ローラ)21とピンチローラ22は紙送りローラ対を構成している。また、第1排紙ローラ30と第1拍車列32は第1排紙ローラ対を構成し、第2排紙ローラ31と第2拍車列33は第2排紙ローラ対を構成し、これら第1排紙ローラ対及び第2排紙ローラ対によって一対の排紙ローラ対が構成されている。
The leading edge of the paper gradually reaches the nip portion of the first
記録部は、主に、記録データを基づいて被記録用紙に記録を行う記録手段としての記録ヘッド11と、記録ヘッド11を搭載して被記録用紙搬送方向と交叉(通常直交)する方向に走査(移動)するキャリッジ13とから構成されている。キャリッジ13は、シャーシ10に固定されたガイドシャフト14とシャーシ10の一部であるガイドレール15とによって案内支持され、キャリッジモータ17とアイドラプーリ20との間に張架されたキャリッジベルト16を介してキャリッジモータ17の駆動力を伝達することにより、往復移動(走査)される。
The recording unit mainly scans in a direction crossing (usually orthogonal) to the recording sheet conveyance direction by mounting the
記録ヘッド11にはインクタンク12に接続される複数のインク流路が形成されており、インク流路はプラテン29と対向する面(吐出口面)に配された吐出口まで連通している。吐出口列を形成する複数の吐出口のそれぞれの内部にはインク吐出用のアクチュエータが配されている。このアクチュエータとしては、例えば、電気熱変換体(発熱素子)による液体の膜沸騰圧力を利用したものや、ピエゾ素子等の電気機械変換体(電気−圧力変換素子)などが用いられる。
A plurality of ink flow paths connected to the
記録装置として上記のような記録ヘッド11を用いるインクジェット記録装置においては、記録ヘッド11に、フレキシブルフラットケーブル73を介してヘッドドライバ307の信号を伝達することで、記録データに応じてインク滴を吐出することが可能である。また、シャーシ10に張架されたコードストリップ18をキャリッジ13に搭載されたCR(キャリッジ)エンコーダ19によって読み取ることで、適切なタイミングで被記録用紙に向けてインク滴を吐出することができる。このようにして、1ライン分の記録が終了すると、前記用紙搬送部(被記録媒体搬送部)により必要量だけ被記録用紙を搬送(紙送り)する。この動作を繰り返して実施することにより、被記録用紙全面にわたる記録動作が可能となる。
In the ink jet recording apparatus using the
記録ヘッドメインテナンス部は、記録ヘッド11の吐出口の目詰まりを防止したり、記録ヘッド11の吐出口面の紙粉等による汚れを解消したりすることで、記録ヘッド11の記録動作を正常状態に維持回復するためのものである。そのための回復機構として、例えば、吐出口を覆うキャッピング機構、キャッピング状態で吐出口からインクを吸引排出させる吸引回復機構、吐出口の周辺部を拭き取り清掃するワイピング機構などが使用されている。
The recording head maintenance unit prevents the clogging of the ejection port of the
すなわち、キャリッジ13の待機ポジションで記録ヘッド11と対向するように設置されたメインテナンスユニット36は、記録ヘッド11の吐出口面(吐出口が形成された面)に当接して吐出口を保護するキャップを有するキャッピング機構、吐出口面をクリーニングするワイパーを有するワイピング機構、キャップに接続されキャップ内に負圧を発生させる吸引ポンプを有する吸引回復機構などで構成されている。記録ヘッド11の吐出口内のインクをリフレッシュすべくインクを吸い出す際には、キャップを吐出口面に押圧し、吸引ポンプを駆動してキャップ内を負圧とすることでインクを吸引排出する。また、インク吸引後に吐出口面にインクが付着している場合や、吐出口面に紙粉等の異物が付着した場合にそれらを取り除くために、ワイパーを吐出口面に当接させ平行に移動させることにより吐出口面をワイピング(拭き取り清掃)して付着物を除去する。
That is, the
以上が記録装置の概略であり、次に、用紙反転部もしくは自動反転部としての自動両面ユニット2の構成を含め、本実施形態に特有の構成について詳細に説明していく。本実施形態に係る記録装置は、シート状の単票紙から成る被記録用紙の表裏に、操作者の手を煩わせることなく自動的に記録を行うことが可能な、いわゆる自動両面記録が可能なことを特徴としている。
The outline of the recording apparatus has been described above. Next, the configuration unique to the present embodiment will be described in detail, including the configuration of the
先ず、図2を用いて、被記録媒体(被記録用紙)の通過経路について説明する。図2において、104は回転可能に支持された被記録媒体の通紙方向を決める可動フラップから成る切替フラップ、106は回転可能に支持され被記録媒体が両面ユニット2から出ていく時に開閉する出口フラップ、108は両面ユニット2内で被記録用紙(被記録媒体)を搬送する反転ローラとしての両面ローラA、109は両面ユニット2内で被記録用紙を搬送する反転ローラとしての両面ローラB、112は両面ローラA108に従動する両面ピンチローラA、113は両面ローラB109に従動する両面ピンチローラBである。
First, the passage path of the recording medium (recording paper) will be described with reference to FIG. In FIG. 2,
記録動作が開始されると、メインASF37に積載された複数枚の被記録用紙から、給紙ローラ39の作用により1枚ずつ被記録用紙が給紙され、紙送りローラ21へ送給(搬送)される。紙送りローラ21とピンチローラ22に挟持された被記録用紙は図2中の矢印a方向へ搬送される。両面記録を実施する場合は、表(おもて)面記録終了後、被記録用紙はメインASF37の下方に設けられた水平パス内を図2中の矢印b方向に搬送される。自動反転部としての自動両面ユニット2は、メインASF37の後方に配置されているので、被記録用紙は水平パスから自動両面ユニット2内へ導かれ、図2中の矢印c方向へ搬送される。
When the recording operation is started, the recording paper is fed one by one by the action of the
自動両面ユニット2内では、被記録用紙は、両面ローラB109と両面ピンチローラB113に挟持されて進行方向を転換し、更に両面ローラA108と両面ピンチローラA112に挟持されて図2中の矢印d方向に搬送され、最終的には進行方向を180度変えて(転換して)水平パスに戻る。水平パス内を図2中の矢印a方向に搬送された被記録用紙は、再び紙送りローラ21とピンチローラ22に挟持され、裏面の記録を実施される。以上のように、表面記録終了後の被記録用紙は、メインASF37の下方にある水平パスと、メインASF37の後方にある自動両面ユニット2とによって表裏反転されて再び裏面を記録されることにより、自動的に表裏に記録を実施される。
In the
ここで、表面(第1面、おもて面)記録時の記録範囲について説明する。記録ヘッド11は紙送りローラ21と第1排紙ローラ30の間に吐出口領域(記録領域、インク吐出領域)Nを有しているが、吐出口へのインク流路配置の都合や、インクを吐出させるアクチュエータ(吐出エネルギー発生手段)への配線の都合などにより、紙送りローラ21のニップ部の直近に吐出口領域Nを配置することは通常困難である。よって、被記録用紙が紙送りローラ21とピンチローラ22で挟持されている範囲では、紙送りローラ21のニップ部より下流側に図2中に示す長さL1だけ離れた範囲までしか記録を行うことができない。
Here, the recording range at the time of surface (first surface, front surface) recording will be described. The
この表面下端余白領域を少なくするために、本実施形態に係る記録装置では、紙送りローラ21のニップ部から被記録用紙が離脱し、第1排紙ローラ30及び第2排紙ローラ31だけで挟持され搬送される部分まで記録を続行する。これにより、表面下端余白がゼロになるまでの記録動作が可能になる。しかし、この状態から前述の図2中の矢印b方向に被記録用紙を搬送しようとすると、紙送りローラ21とピンチローラ22のニップ部へ被記録用紙を案内(ガイド)することができず(又は困難で)、いわゆる用紙ジャムが発生する可能性がある。本実施例では、このような用紙ジャムを回避するために、以下に説明する手段により紙送りローラ21からピンチローラ22をリリース(離間)させて所定の隙間を作り、その隙間に被記録用紙端部を引き込んでから、再度ピンチローラ22を紙送りローラ21に圧接することにより、図2中の矢印b方向への被記録用紙の搬送を可能にしている。
In order to reduce the lower end margin area of the front surface, in the recording apparatus according to the present embodiment, the recording paper is separated from the nip portion of the
次に、本実施形態の特徴的な構成である、ピンチローラ22のリリース機構、用紙検知レバー(PEセンサレバー)66のリリース機構、ピンチローラばね24の圧力調整機構、ガイド部材(通紙ガイド)70の上下機構、並びにキャリッジ13の上下機構に関して説明する。前述のごとく、被記録用紙を再引っ込みするためにピンチローラ22を紙送りローラ21からリリース(離間、離隔)させるように動作するが、被記録用紙を再引っ込みした後に被記録用紙の表裏を反転させるために、その他にもいくつかの機構を持っている。
Next, the release mechanism of the
その一つは、用紙検知レバーとしてのPEセンサレバー66のリリース機構である。通常のPEセンサレバー66は被記録用紙が正方向に進行する時に被記録用紙の先端や後端の位置を正確に検知できるように、被記録用紙の紙面に対して所定の角度をもって揺動するように取り付けられている。そのように設定されているため、逆方向に用紙が進行した場合には、被記録用紙端部が引っ掛かってしまったり、搬送中の被記録用紙にPEセンサレバー66の先端が食い込んでしまったりするという技術的課題がある。そのため、本実施形態においては、被記録用紙の表裏反転工程の途中まで、PEセンサレバー66を通紙面からリリースしてしまい、被記録用紙に当接しないように構成している。
One of them is a release mechanism for a
なお、上記のPEセンサレバー66のリリース機構は必ずしも必須の構成ではなく、他の手段又は構成に置き換えることも可能である。すなわち、前述の技術的課題を解決するための手段として、PEセンサレバー66の先端にコロなどを設け、被記録用紙が逆方向に進行しても、コロが回転することにより上記技術的課題を解決する手段を採っても良い。また、PEセンサレバー66の振れる角度を大きく取り、被記録用紙が逆方向に搬送された時には、PEセンサレバー66が通常とは逆方向の角度に振れるようにして前述の技術的課題を解決する手段を採っても良い。
Note that the release mechanism of the
もう一つは、ピンチローラばね24の圧力調整機構、すなわちピンチローラ22を紙送りローラ21に圧接する圧力(ばね力)を変動させるための圧力調整機構である。本実施形態では、ピンチローラ22をリリース(離間)するために、ピンチローラホルダ23全体を回転させてリリースするように構成されている。ピンチローラ22を紙送りローラ21に圧接している状態では、ピンチローラばね24でピンチローラホルダ23を押圧しているので、ピンチローラホルダ23をリリース方向に回転させるとピンチローラばね24の圧力は高まる方向に変動し、ピンチローラホルダ23をリリースするための負荷の増大や、ピンチローラホルダ23自体にかかる応力の増大などの弊害がある。これを防止するために、ピンチローラホルダ23のリリースの際にピンチローラばね24の圧力を減じる機構(圧力調整機構)が設けられている。
The other is a pressure adjusting mechanism for the
もう一つは、通紙ガイドの上下機構である。通紙ガイド70から成るガイド部材は、上流側端部と下流側端部が低い山形の凸形状をしており、自動給紙部37から搬送される被記録媒体を案内する第1の通紙経路と、両面ユニット2から成る自動反転部に搬送したり自動反転部から搬送されてくる被記録媒体を案内する第2の通紙経路との共有部分の一部を構成している。この通紙ガイド70は、通常、メインASF37から給紙される被記録用紙を紙送りローラ21に案内するため、前述のごとく水平から若干角度の付いたLFローラ21のニップ部に円滑に被記録用紙を導くように、水平パスより若干角度が上がった場所に位置している(図2に示す状態)。しかしながら、このままだと、図2中の矢印b方向に被記録用紙を搬送した場合、被記録用紙は再びメインASF37に向かって案内されてしまうので、これを防止して円滑に水平パスに案内できるように、通紙ガイド70を水平になるように角度を変えた方が好適な構成となる。そのために、ガイド部材としての通紙ガイド70を上下する上下機構が設けられている。
The other is a mechanism for raising and lowering the paper passing guide. The guide member composed of the
最後の一つは、キャリッジ13の上下機構である。これは、ピンチローラホルダ23がリリース状態(紙送りローラ21から離間した状態)になると、ピンチローラホルダ23の先端がキャリッジ13に近づくので、両者が当接してキャリッジ13が主走査方向に移動できなくなることを防止するためのものである。このため、ピンチローラホルダ23のリリース動作に同期してキャリッジ13を上昇させるための上下機構が設けられている。また、このキャリッジ13の上下機構は、他の用途にも適用でき、例えば、厚い被記録用紙に記録する際に記録ヘッド11と被記録用紙が接触しないようにするために、記録ヘッド11を退避する目的で移動させる際にも利用することができる。
The last one is the vertical mechanism of the
以下に、上述の5つの機構(ピンチローラ22のリリース機構、PEセンサレバー66のリリース機構、ピンチローラばね24の圧力調整機構、通紙ガイド70の上下機構、キャリッジ13の上下機構)に関して詳細に説明する。図3は、ピンチローラリリース機構、PEセンサレバーリリース機構、ピンチローラばね圧力調整機構、及び通紙ガイド上下機構の概略構成を示す模式的斜視図である。
Hereinafter, the five mechanisms described above (the release mechanism of the
図3において、59はピンチローラホルダ23に当接するピンチローラホルダ押圧カム、60はピンチローラばね24の作用点となるピンチローラばね押圧カム、61はPEセンサレバー66に当接するPEセンサレバー押圧カム、62はリフトカム軸58の角度を示すリフトカム軸遮蔽板、65は通紙ガイド70に当接する通紙ガイド押圧カム、66は被記録用紙に接触して先端や後端を検知するPEセンサレバー、67はPEセンサレバー66によって透過/遮蔽されるPEセンサ、68はPEセンサレバー66を所定方向に付勢するPEセンサレバーばね、69はリフトカム軸遮蔽板62によって透過/遮蔽されるリフトカムセンサ、71は通紙ガイド70を所定方向に付勢する通紙ガイドばねである。
In FIG. 3, 59 is a pinch roller holder pressing cam that contacts the
ピンチローラリリース機構、PEセンサレバーリリース機構、ピンチローラばね圧力調整機構及び通紙ガイド上下機構は、リフトカム軸58の回転によって作動する。本実施例の機構では、リフトカム軸58には、ピンチローラホルダ押圧カム59、ピンチローラばね押圧カム60、PEセンサレバー押圧カム61、通紙ガイド押圧カム65がそれぞれ固定されているので、リフトカム軸58の1回転に同期してそれぞれのカムが動作するように構成されている。ここで、リフトカム軸58の初期角度及び1回転は、リフトカム軸遮蔽板62がリフトカムセンサ69を遮蔽又は透過することにより認識される。なお、本発明の趣旨はこのような構成に拘束されるものではなく、必要に応じてそれぞれを独立に駆動する機構を採用しても良い。
The pinch roller release mechanism, the PE sensor lever release mechanism, the pinch roller spring pressure adjustment mechanism, and the sheet passing guide up / down mechanism are operated by the rotation of the
次に、それぞれの機構の動作について説明する。図4は、ピンチローラリリース機構及びピンチローラばね圧力調整機構の動作を模式的に示す部分側面図である。図4の(a)は、ピンチローラホルダ押圧カム59が初期位置にあり、ピンチローラ22が紙送りローラ21に圧接する状態であり、ピンチローラばね24の圧力が標準状態にある場合を示す。ピンチローラホルダ23は、そのピンチローラホルダ軸23aでシャーシ10の軸受部により回転自在に支持されており、所定角度範囲にわたって揺動可能に構成されている。ピンチローラホルダ23の一端にはピンチローラ22が回転可能に支持されており、他端にはピンチローラホルダ押圧カム59と当接する領域が設けられている。
Next, the operation of each mechanism will be described. FIG. 4 is a partial side view schematically showing the operations of the pinch roller release mechanism and the pinch roller spring pressure adjustment mechanism. FIG. 4A shows a case where the pinch roller
図4の(a)において、ピンチローラばね24は、一端をピンチローラホルダ23のピンチローラ22側に力点として当接させられ、他端をピンチローラばね押圧カム60で支持され、ばね中間部をシャーシ10の支持部により支持された捩じりコイルばねである。このような支持形態により、所定圧力でピンチローラ22が紙送りローラ21に圧接されている。この状態で紙送りローラ21の回転駆動機構を動作させれば、紙送りローラ21とピンチローラ22のニップ部に挟持された被記録用紙を搬送することができる。
4A, one end of the
図4の(b)は、ピンチローラ22がリリース(離間)した状態にあり、かつピンチローラばね24が抜重状態である場合を示す。すなわち、リフトカム軸58が図4中の矢印a方向に回転することにより、ピンチローラホルダ押圧カム59がピンチローラホルダ23に当接し、ピンチローラホルダ23が徐々に図4中の矢印b方向に回動され、ピンチローラ22は紙送りローラ21からリリース(離間又は離隔)されている。また、図4の(b)の状態では、ピンチローラばね押圧カム60はピンチローラばね24との当接面が小半径部となり、ピンチローラばね24の捩じり角度θ2は図4の(a)の時の角度θ1より開いている(大きくなっている)ために、ばね加重が低減し、ピンチローラホルダ23には殆ど加重がかかっていない状態になっている。これにより、ピンチローラホルダ23には殆ど応力がかからない状態となる。この状態では、紙送りローラ21とピンチローラ22の間には所定量の隙間Hが形成されており、大まかに(ラフに)案内(ガイド)された被記録用紙でも、その先端を容易にニップ部に挿入することが可能である。
FIG. 4B shows a case where the
図4の(c)は、ピンチローラ22は図4の(a)と同様に紙送りローラ21に圧接されているが、圧接力が弱い軽圧接状態である場合を示す。図4の(c)の状態では、リフトカム軸58が更に図4中の矢印a方向に回転することにより、ピンチローラホルダ押圧カム59とピンチローラホルダ23の当接は解除され、ピンチローラホルダ23は図4中の矢印c方向に回転して元の状態に戻り、ピンチローラばね押圧カム60はピンチローラばね24との当接面が図4の(a)の場合と図4の(b)の場合の中間の半径になっている。
FIG. 4C shows a case where the
これにより、ピンチローラばね24の捩じり角度θ3は図4の(a)の角度θ1より若干少ない(小さい)状態であるので、紙送りローラ21にピンチローラ22を圧接させる力は若干少なく(小さく)なっている。このような構成によれば、通常よりも厚い被記録用紙が紙送りローラ21とピンチローラ22の間に挟持された場合に、ピンチローラばね24の捩じり角度が通常より多くなり、それによって、ピンチローラホルダ23に対する発生加重が大きくなることを防止することができる。よって、通常の厚さの被記録用紙でも、厚い被記録用紙の場合でも、紙送りローラ21の軸損による回転負荷を平準化することができる。以上の状態を経て、リフトカム軸58を1回転させると、ピンチローラリリース機構及びピンチローラばね圧力調整機構は、図4の(a)の状態に戻り、標準状態となる。
As a result, the twisting angle θ3 of the
図5は、PEセンサレバー上下機構の動作を模式的に示す部分側面図である。図5の(a)は、PEセンサレバー押圧カム61が初期位置にあり、PEセンサレバー(用紙検知レバー)66がフリー状態になっている場合を示す。PEセンサレバー66は、そのPEセンサレバー軸66aをシャーシ10の軸受部により軸支することにより、回転自在に支持されている。この図5の(a)の状態では、PEセンサレバー66はPEセンサレバーばね68の作用により図示の位置に付勢され、PEセンサレバー66の遮蔽板部がPEセンサ67を遮蔽している。この状態から、被記録用紙がPEセンサレバー66の部位を通過すると、PEセンサレバー66は図5中の時計方向に回転し、PEセンサ67が透過状態となり、被記録用紙が存在することを検出することができる。この遮光及び透過の状態で被記録用紙の先端及び後端を検知することができる。
FIG. 5 is a partial side view schematically showing the operation of the PE sensor lever up-and-down mechanism. FIG. 5A shows a case where the PE sensor
図5の(b)は、用紙検知レバーとしてのPEセンサレバー66がロックされた状態を模式的に示す部分側面図である。図5の(b)において、PEセンサレバー押圧カム61が矢印a方向へ回動することにより、PEセンサレバー66のカムフォロワ部が押し上げられて、矢印b方向へ回動している。この状態では、PEセンサレバー66の用紙検知部はピンチローラホルダ23より内側に隠れてしまい、被記録用紙が通過パスに有っても、被記録用紙とPEセンサレバー66が当接することはない。よって、この状態で被記録用紙を図2中の矢印b方向に搬送しても、被記録用紙がPEセンサレバー66に当たってジャムしたりすることが無くなる。
FIG. 5B is a partial side view schematically showing a state in which the
図6は、通紙ガイド上下機構の動作を模式的に示す部分側面図である。図6の(a)は、ガイド部材としての通紙ガイド70がアップ状態である第1のポジションに位置している状態を示す。図6の(a)において、通紙ガイド70は通常通紙ガイドばね71により持ち上げられる方向に付勢されており、不図示のストッパに突き当たって位置(上昇位置、アップ位置)を決められている。この弾性部材としての通紙ガイドばね71の作用により、メインASFから給紙された被記録用紙が通過する場合は、通紙ガイド70はこの姿勢(アップ状態)を保っている。ただし、通常より大きな力がかかった場合には、通紙ガイド70は通紙ガイドばね71のばね力に抗して下がる(ダウン状態になる)ことができるように構成されている。
FIG. 6 is a partial side view schematically showing the operation of the sheet passing guide up / down mechanism. FIG. 6A shows a state in which the
図6の(b)は、通紙ガイド70がダウン状態である第2のポジションに位置している状態を示す。図6の(b)において、リフトカム軸58に固定された通紙ガイド押圧カム65が図6中の矢印a方向に回転することにより、通紙ガイド押圧カム65が通紙ガイド70の一部である通紙ガイドカムフォロワ部70aに当接して徐々に押圧していく。これによって、通紙ガイド70は、図6中の矢印b方向に回転させられ、通紙ガイドばね71のばね力に抗して押し下げられる。この状態では、通紙ガイド70の通紙パスに面する部分は略水平になり、通紙パスはほぼ完全にストレートになる。これにより、図2中で、用紙が紙送りローラ21より矢印b方向へ搬送される際も、被記録用紙は水平に搬送され、被記録用紙表面の既に記録が行われた部分が通紙パス上方に押し付けられることが無くなる。
FIG. 6B shows a state in which the
図7は、キャリッジ上下機構を示す模式的斜視図である。図7において、14aはガイドシャフト14に取り付けられた右ガイドシャフトカム、14bはガイドシャフト14に取り付けられた左ガイドシャフトカム、53はリフトカムギア52と右ガイドシャフトカム14aとの一体のギアをつなぐカムアイドラギアである。ガイドシャフト14は、図1に示すように、シャーシ10の両側面に支持されており、不図示の上下方向のガイド長穴とガイドシャフト14とが嵌合し、図7中の矢印Z方向には自由に動けるが、図7中の矢印X方向及びY方向の移動は規制されている。
FIG. 7 is a schematic perspective view showing the carriage vertical mechanism. In FIG. 7, 14a is a right guide shaft cam attached to the
図7に示す機構においては、通常ではガイドシャフト14はガイドシャフトばね74によって下方向(矢印Zと反対方向)に付勢されているが、カムアイドラギア53が回転すると、右ガイドシャフトカム14a及び左ガイドシャフトカム14bがガイド斜面56と当接することにより、ガイドシャフト14は回転しながら上下方向に移動するように構成されている。
In the mechanism shown in FIG. 7, the
図8は、キャリッジ上下機構の動作を模式的に示す部分側面図である。図8の(a)は、キャリッジ13が標準位置である第1キャリッジポジションにある場合を示す。この状態では、ガイドシャフト14はシャーシ10のガイド長孔57の下限に突き当てられて位置決めされており、ガイドシャフトカム14aとガイド斜面56は接触していない。
FIG. 8 is a partial side view schematically showing the operation of the carriage vertical mechanism. FIG. 8A shows a case where the
図8の(b)は、キャリッジ13が少し高い第2キャリッジポジションに移動した状態を示す。リフトカム軸58の回転により、リフトカム軸58に固定されたリフトカムギア52が回転すると、リフトカムギア52と契合したカムアイドラギア53を介してガイドシャフトカム14cが回転する。このガイドシャフトカム14cの回転により、ガイドシャフト14に案内支持されたキャリッジ13は第1キャリッジポジションから第2キャリッジポジションへ移動(上昇)する。この時、リフトカムギア52とガイドシャフトカムギア14cを同じ歯数にしておくと、リフトカム軸58とガイドシャフト14は同じ方向にほぼ同じ角度回転することになる。全く同じ角度で回転しないのは、リフトカムギア52とカムアイドラギア53は回転軸が固定されているのに対し、ガイドシャフトカムギア14cは回転軸たるガイドシャフト14自身が上下動を伴うことでギア間距離が変動するためである。
FIG. 8B shows a state where the
以上により、リフトカム軸58が図8中の矢印a方向に回転すると、ガイドシャフト14も図8中の矢印b方向に回転する。この回転により、固定されているガイド斜面56にガイドシャフトカム14a、14bが当接し、ガイドシャフト14の移動方向が前述のごとくシャーシ10のガイド長孔57により上下方向のみに規制されているため、ガイドシャフト14は第2キャリッジポジションに移動することになる。この第2キャリッジポジションは、被記録用紙の変形が大きく、第1キャリッジポジションで被記録用紙と記録ヘッド11が当接してしまうような場合に設定すると好適である。
As described above, when the
図8の(c)は、キャリッジ13が最も高い第3キャリッジポジションにある場合を示す。リフトカム軸58が第2キャリッジポジションより更に回転することにより、ガイドシャフトカム14a、14bのカム面の半径が大きくなり、ガイドシャフト14は更に高い位置へ移動する。この第3キャリッジポジションは、通常よりも厚みのある被記録媒体(被記録用紙)を使用する場合などに好適である。以上が、5つの機構、すなわちピンチローラリリース機構、PEセンサレバーリリース機構、ピンチローラばね圧力調整機構及び通紙ガイド上下機構の詳細な説明である。
FIG. 8C shows a case where the
図9はリフトカム軸の駆動機構を示す模式的斜視図である。次に、リフトカム軸58の駆動機構について説明する。本実施形態においては、リフトカム軸58の駆動源は、メインASF37を駆動するASFモータ46の回転方向及び回転量の制御により、適宜メインASF(自動給紙部)37を動作させたり、リフトカム軸58を動作させたりしている。図9において、46は駆動源たるASFモータ(ギア類を示すために上半分を切り取って表示)、47はASFモータ46に取り付けられたギアの次段に位置するASF振り子アーム、48はASF振り子アーム47の中心に取り付けられたASF太陽ギア、49はASF振り子アーム47の端部に取り付けられてASF太陽ギア48と契合するASF遊星ギア、63はリフトカム軸58に固定された振り子ロックカム、64は振り子ロックカム63に作用して揺動する振り子ロックレバーである。
FIG. 9 is a schematic perspective view showing a drive mechanism of the lift cam shaft. Next, the drive mechanism of the
前述のように、ASFモータ46の回転方向により駆動力伝達方向が決定されるが、リフトカム軸58を動作させる目的の場合には、ASFモータ46を図9中の矢印a方向に回転させる。すると、ASFモータ46に取り付けられたギアがASF太陽ギア48を回転させる。ASF太陽ギア48とASF振り子アーム47は所定の摩擦力を持って回転可能に契合されているので、ASF太陽ギア48の回転方向(図9中の矢印b方向)にASF振り子アーム47が振れる。すると、ASF遊星ギア49が次段のリフト入力ギア50と契合する。これにより、ASFモータ46の駆動力が、リフト減速ギア列51を介してリフトカムギア52まで伝達される。なお、この時はASF振り子アーム47が図9中の矢印b方向に振れていることにより、自動給紙部としてのメインASF37を駆動するギア列への駆動力は切断された状態になっている。
As described above, the driving force transmission direction is determined by the rotation direction of the
逆に、自動給紙部としてのメインASF37を駆動する場合には、ASFモータ46を図9中の矢印aと反対方向に回転させることにより、前記とは逆にASF振り子アーム47が図9中の矢印bと反対方向に振れる。これにより、ASF遊星ギア49とリフト入力ギア50との契合が解除され、ASF振り子アーム47に設けられたもう一つのASF遊星ギア49がメインASF37側のギア列と契合して、メインASF37が駆動される。なお、本実施形態においては、ASFモータ46としていわゆるステッピングモータを使用し、これをオープンループで制御している。また、DCモータなどにエンコーダを使用してクローズドループ制御としても良いことは言うまでもない。
Conversely, when driving the
ここで、駆動力伝達に遊星ギア機構を使用している場合には、被駆動側がマイナスの負荷になった場合、振り子ロックレバー64が動いてギアの契合が外れてしまい、被駆動側が駆動源よりも位相が進んでしまう、いわゆる先回りが起こってしまう可能性がある。これを防止するために、本実施例では、振り子ロックカム63と振り子ロックレバー64を配している。リフトカム軸58が所定角度範囲にある場合には、振り子ロックカム63のカム面形状により振り子ロックレバー64が図9中の矢印c方向に揺動し、振り子ロックレバー64がASF振り子アーム47に契合して、メインASF37を駆動する側に戻れないように固定する。これにより、ASF遊星ギア49がリフト入力ギア50と常時噛み合った状態となるので、ASFモータ46とリフトカム軸58は常に同期して回ることになる。
Here, when a planetary gear mechanism is used for driving force transmission, when the driven side becomes a negative load, the
また、振り子ロックカム63が所定角度範囲に戻ってくると、振り子ロックレバー64が図9中の矢印cと反対方向に戻り、ASF振り子アーム47のロックが解除されて、ASFモータ46を逆転させればメインASF側に駆動が伝達できる状態に復帰する。以上説明したリフトカム軸58の駆動機構により、ピンチローラ22のリリース、PEセンサレバー66のロック、ピンチローラばね24の圧力調整、通紙ガイド70の上下動作、キャリッジ13の上下動作が可能となる。なお、以下では、前記5種類の可動機構を総称して、リフト機構と称する。
Further, when the
次に、これら5種類の可動機構(リフト機構)がどのように相関して動作するかを説明する。図10は、キャリッジ13、ピンチローラ22、PEセンサレバー66、通紙ガイド70の動作を示す模式的部分側面図である。図10の(a)は、リフト機構が第1ポジションにある場合を示す。この状態では、ピンチローラ22は紙送りローラ21に圧接された状態にあり、PEセンサレバー66はフリーの状態にあり、ピンチローラばね24(図4)は通常圧力で圧接されており、通紙ガイド70はアップ状態にあり、キャリッジ13は第1キャリッジポジションにある。
Next, how these five types of movable mechanisms (lift mechanisms) operate in correlation will be described. FIG. 10 is a schematic partial side view showing the operations of the
この図10の(a)の状態は、通常の被記録用紙を用いた記録動作、あるいは自動両面ユニット2での被記録用紙反転後のレジストレーション取り等に使用されるポジションである。なお、キャリッジ13はガイドシャフト14に沿って移動可能に案内支持されており、ガイドシャフト14をシャーシ10に形成されたガイド長孔57に沿って上下動させることによりキャリッジ13を上下動させるように構成されている。
The state shown in FIG. 10A is a position used for a recording operation using a normal recording sheet or registration removal after reversing the recording sheet in the
図10の(b)は、リフト機構が第2ポジションにある場合を示す。この状態では、ピンチローラ22は紙送りローラ21に圧接された状態にあり、PEセンサレバー66はフリーの状態にあり、ピンチローラばね24は通常圧力で圧接されており、通紙ガイド70はアップ状態にあり、キャリッジ13は第2キャリッジポジションにある。これは、リフト機構の第1ポジションと比較すると、キャリッジ13の高さ位置が異なるだけである。この状態は、被記録用紙の変形が大きく、被記録用紙と記録ヘッド11が擦れてしまうのを解消するためや、若干厚みのある被記録用紙を使用する場合などに使用されるポジションである。
FIG. 10B shows a case where the lift mechanism is in the second position. In this state, the
図10の(c)は、リフト機構が第3ポジションにある場合を示す。この状態では、ピンチローラ22は紙送りローラ21からリリース(離脱)され所定隙間が空いた状態にあり、PEセンサレバー66は上方に退避してロック(錠止)された状態にあり、ピンチローラばね24(図4)は圧接力を弱められた状態にあり、通紙ガイド70はダウンされた状態にあり、キャリッジ13は最も高い第3キャリッジポジションにある。リフト機構の第2ポジションと比較すると、全ての状態が変化して、通紙パスがストレートに開放され、被記録用紙の引き込みが可能となった状態である。この状態は、被記録用紙の表面記録終了後に被記録用紙を図2中の矢印b方向に搬送する場合や、厚みの厚い被記録媒体を挿入する場合などに使用されるポジションである。
FIG. 10C shows the case where the lift mechanism is in the third position. In this state, the
図10の(d)は、リフト機構が第4ポジションにある場合を示す。この状態では、ピンチローラ22は紙送りローラ21に圧接されており、PEセンサレバー66は上方に退避してロック(錠止)された状態にあり、ピンチローラばね24(図4)は若干弱い圧力で圧接されており、通紙ガイド70はダウンされた状態にあり、キャリッジ13は最も高い第3キャリッジポジションにある。この状態は、リフト機構の第3ポジションと比較すると、ピンチローラ22が圧接状態に戻され、ピンチローラばね24が若干弱い圧力で圧接されているように変化している。この状態は、自動両面記録時の被記録用紙再引き込み後に自動両面ユニット2に向けて被記録用紙を搬送する場合や、厚みの厚い被記録媒体を使用して記録する際に使用されるポジションである。
FIG. 10D shows a case where the lift mechanism is in the fourth position. In this state, the
本実施形態においては、記録装置の動作に鑑みて、一例として、図10の(a)〜図10の(d)に示すような4種類のリフト機構のポジションに限定することで、機構を簡略化している。すなわち、リフトカム軸58が1回転する間に、第1ポジション→第2ポジション→第3ポジション→第4ポジション→第1ポジションと循環してポジションが変化するようにしている。なお、本発明の趣旨はこれに限定されず、それぞれの機構要素が適宜独立して動作するように構成しても良い。また、ピンチローラばね24の圧力調整機構は必須ではなく、ピンチローラホルダ23の剛性が充分に高い場合や、LFモータ26の負荷変動を問題にしない場合は、省略可能である。また、メインASF37の配置などにより、通紙ガイド70が水平でも、上手く紙送りローラ21のニップ部に被記録用紙先端をガイドできる機構であれば、通紙ガイド70の上下機構は無くても良い。
In the present embodiment, in view of the operation of the recording apparatus, as an example, the mechanism is simplified by limiting the positions of the four types of lift mechanisms as shown in FIGS. 10A to 10D. It has become. That is, while the
図11は、リフト機構の動作状態を示すタイミングチャートである。図4〜図10で説明した内容を更に分かり易くするために、図11のタイミングチャートを用いて再度説明する。図11の横軸はリフトカム軸58の角度を360度の範囲で示しており、縦軸にそれぞれの機構要素とそのポジションを示している。図11において、リフトカム軸58及びガイドシャフト14を同期して動作させることによって、リフトカム軸58の角度をリフトカムセンサ69(図3)で検知し、ASFモータ46(図21)の回転角度を制御することだけで、複数の機構を同時に作動させることができる。以上がリフト機構の動作の説明である。
FIG. 11 is a timing chart showing the operating state of the lift mechanism. In order to make the contents described in FIGS. 4 to 10 easier to understand, the description will be given again using the timing chart of FIG. The horizontal axis in FIG. 11 indicates the angle of the
図12は、被記録用紙の表面(おもて面、第1面)の記録終了後に、被記録用紙を紙送りローラ21のニップ部に再度引き込む過程を説明するための模式的側面図である。次に、図12を参照して、被記録用紙にどのように自動両面記録するかについて具体的に説明する。図12の(a)は、被記録媒体としての被記録用紙4の表面(おもて面、第1面)の記録が終了し、被記録用紙4が第1排紙ローラ30及び第1拍車列32、第2排紙ローラ31及び第2拍車列33にて挟持されている状態を示す。第1拍車列32及び第2拍車列33は対応する排紙ローラに押圧されて従動回転する回転体で構成されている。この時、リフト機構は第1ポジションあるいは第2ポジションの状態にある。前述のごとく、この状態まで被記録用紙4を前進させて記録を行うと、被記録用紙4の後端部一杯まで記録ヘッド11の吐出口列(吐出ノズル列)が対向できるので、被記録用紙4に下端余白を作ることなく記録することも可能である。
FIG. 12 is a schematic side view for explaining a process of drawing the recording paper again into the nip portion of the
次に、リフト機構を図12の(b)に示すような第3ポジションに移行させ、ピンチローラ22と紙送りローラ21の間に所定量の大きな隙間をあけることにより、被記録用紙4の後端が多少波打っていたり、上に反り返っていたりしても、容易に引き込めるようにする。なお、この時に、ピンチローラホルダ23とキャリッジ13が干渉することはないので、キャリッジ13は主走査方向のどの位置にあっても構わない。
Next, the lift mechanism is shifted to the third position as shown in FIG. 12B, and a large gap of a predetermined amount is formed between the
図12の(b)は、図12の(a)の状態から第1排紙ローラ30を図示矢印方向に回転させることにより被記録用紙4を図2中の矢印b方向に搬送し(以下、この方向に被記録用紙4を搬送することをバックフィードと称する)、ピンチローラ22の下まで移動させ、そこに停止させている状態を示す。この状態で停止させる理由は、本実施形態の記録装置が湿式のインクジェット記録方式を採用しているためである。すなわち、被記録用紙4の記録済み面(図12での上面)は、記録動作直後でインクで濡れた状態にあり、直ぐにピンチローラ22と紙送りローラ21で圧接してしまうと、ピンチローラ22にインクが転写され、そのインクが再び被記録用紙4に再転写され、被記録用紙4に汚れを発生させてしまう可能性があるからである。
12B, the
インクがピンチローラ22に転写してしまうかどうか、言い換えれば被記録用紙4上に打ち込まれたインクが乾燥しているかどうかは、数々の条件に左右される。すなわち、被記録用紙の種類、使用インクの種類、使用インクの重ね打ち込み方法、使用インクの単位面積あたりの打ち込み量(例えば記録したデータの単位面積あたりの密度)、記録動作を行っている環境の温度、記録動作を行っている環境の湿度、記録動作を行っている環境の気体の流速、等の条件である。概略では、表面にインク受容層を持ち、素早く内部にインクを導ける被記録用紙を用いると、インクは早く乾燥しやすい。また、染料等、インクの粒子が小さく、被記録用紙の内部に浸透しやすいインクを使用すれば、早く乾燥しやすい。また、化学的に反応するインクを使用し、被記録用紙表面に重ねて打ち込むことで固化させるインクシステムとすれば、早く乾燥しやすい。
Whether or not the ink is transferred to the
また、単位面積あたりに打ち込むインク量を少なくすれば、早く乾燥しやすい。また、記録動作を行っている環境の温度を高くすれば、早く乾燥しやすい。また、記録動作を行っている環境の湿度を低くすれば、早く乾燥しやすい。また、記録動作を行っている環境の気体の流速を速くすれば、早く乾燥しやすい。以上のように、いくつかの条件により必要な乾燥時間が決定されるので、本実施例においては、所定のインクシステムを用いて、一般的な使用条件(一般的な被記録用紙、一般的な記録動作環境)で記録を行った際に必要な乾燥時間を標準値として指定し、予測可能な条件によって乾燥時間を変動させる構成を用いている。 Also, if the amount of ink applied per unit area is reduced, it is easy to dry quickly. Also, if the temperature of the environment in which the recording operation is performed is increased, it is easy to dry quickly. Also, if the humidity of the environment in which the recording operation is performed is lowered, it is easy to dry quickly. Also, if the flow velocity of the gas in the environment where the recording operation is performed is increased, it is easy to dry quickly. As described above, since the necessary drying time is determined depending on several conditions, in the present embodiment, the general use conditions (general recording paper, general recording paper, using a predetermined ink system). In the recording operation environment), a necessary drying time is designated as a standard value, and the drying time is changed according to a predictable condition.
この予測可能な条件は、単位面積あたりの打ち込みインク量であるが、その他にも、環境温度検知手段や、環境湿度検知手段、環境風速検知手段等を併用すれば、更に乾燥待機時間を細かく予測することも可能である。例えば、ホスト装置308(図21)から受信したデータをRAM312(図21)上に記憶し、単位面積あたりの打ち込みインク量を計算して、その最大値とROM311(図21)に記述された所定閾値とを比較して、乾燥待機時間を決定する方式とすることができる。すなわち、単位面積あたりの打ち込みインク量の最大値が大きい場合は、乾燥待機時間を長くし、逆に小さい場合には、乾燥待機時間を短くすることで、記録パターンによる乾燥待機時間を最適化することができる。 The predictable condition is the amount of ink applied per unit area. In addition, if the environmental temperature detecting means, the environmental humidity detecting means, the environmental wind speed detecting means, etc. are used in combination, the drying standby time is further predicted. It is also possible to do. For example, the data received from the host device 308 (FIG. 21) is stored on the RAM 312 (FIG. 21), the amount of ink hit per unit area is calculated, and the maximum value and a predetermined value described in the ROM 311 (FIG. 21) are calculated. A method of determining the drying standby time by comparing with a threshold value can be adopted. That is, when the maximum value of the amount of ink deposited per unit area is large, the drying standby time is lengthened. Conversely, when the maximum value is small, the drying standby time is shortened to optimize the drying standby time according to the recording pattern. be able to.
また、記録に使用したインクの種類が、染料系インクであるか、顔料系インクであるかによっても乾燥待機時間が異なるが、染料インクの場合は乾燥しやすいために乾燥待機時間を短くし、顔料インクの場合は乾燥しにくいために乾燥待機時間を長くする。また、周囲温度が高いときには、乾燥しやすいので、乾燥待機時間を短くし、周囲温度が低いときには、乾燥しにくいので、乾燥待機時間を長くする。また、周囲湿度が高いときには乾燥しにくいので、乾燥待機時間を長くし、周囲湿度が低いときには乾燥しやすいので、乾燥待機時間を短くする。また、表面にインク受容層を持ち、打ち込まれたインクをすぐに用紙の内部に取り込むような被記録用紙の場合には、被記録用紙表面は乾燥しやすいので、乾燥待機時間を短くし、撥水性の強い被記録用紙の場合には、乾燥しにくいので、乾燥待機時間を長くする。 Also, the drying standby time varies depending on whether the type of ink used for recording is dye-based ink or pigment-based ink, but in the case of dye ink, the drying standby time is shortened because it is easy to dry, In the case of pigment ink, since it is difficult to dry, the waiting time for drying is increased. Also, when the ambient temperature is high, the drying is easy, so the drying standby time is shortened. When the ambient temperature is low, the drying is difficult, so the drying standby time is lengthened. Further, since the drying is difficult when the ambient humidity is high, the drying standby time is lengthened, and when the ambient humidity is low, the drying is easily performed, so the drying standby time is shortened. Also, in the case of a recording paper that has an ink receiving layer on the surface and takes in the ink that has been struck immediately inside the paper, the surface of the recording paper is easy to dry. In the case of a recording sheet having a strong aqueous property, it is difficult to dry, so the drying waiting time is lengthened.
なお、図12の(a)の位置で乾燥待機しても良いが、そうせずに図12の(b)の位置まで被記録用紙4をバックフィードして待機する方が好適である理由は、被記録用紙4の変形によるところが大きい。すなわち、湿式のインクジェットプロセスで被記録用紙に記録を行った場合には、被記録用紙が水分を吸収するために用紙の繊維が膨張し、被記録用紙が伸びることがある。記録されるパターンにより、用紙に伸びる部分と伸びない部分ができる場合があり、そのような場合には特に顕著に紙面の凹凸が形成される。凹凸の量は、主に被記録用紙が水分を吸収し始めてからの時間に依存し、時間が経つにつれて凹凸量が増加していって、所定の変形量に収束する。
Although it is possible to wait for drying at the position shown in FIG. 12A, the reason why it is preferable to back-feed the
時間が経って用紙端部の変形量が大きくなると、ピンチローラ22を紙送りローラ21から遠ざけてリリースしていても、用紙端部がピンチローラ22に干渉してジャムを起こしてしまう可能性がある。これを防止するために、記録終了後、被記録用紙の凹凸の変形が大きくならないうちにバックフィードをして、ピンチローラ22の下まで被記録用紙を移動させてしまうようにしている。以上の理由により、図12の(b)の位置まで被記録用紙4の表面後端をバックフィードして、被記録用紙の記録済み部分が乾燥するのを待つ。紙送りローラ21とピンチローラ22の離間時の両者の隙間は、被記録用紙の第1面(おもて面)記録後の被記録用紙の変形量より大きく設定されている。
When the amount of deformation at the paper edge increases with time, the paper edge may interfere with the
図12の(c)は、被記録用紙4を自動両面ユニット2に向けて搬送している状態を示す。被記録用紙4の記録済み部分が乾燥し、ピンチローラ22に圧接しても、ピンチローラ22にインクが転写しない状態になったら、リフト機構を図10の(d)に示すような第4ポジションに移行させ、被記録用紙4をピンチローラ22と紙送りローラ21で挟持する。この状態で紙送りローラ21を駆動し、被記録用紙4をバックフィードする。この時、PEセンサレバー66は上方に回転させられロックされているので、PEセンサレバー66の先端が被記録用紙4に食い込んでしまったり、あるいは記録済み部分を擦って剥がしてしまうようなことはない。
FIG. 12C shows a state in which the
また、通紙ガイド70はダウン状態にあるので、その通紙面は略水平になっており、自動両面ユニット2に向けて被記録用紙4を真っ直ぐに搬送することができる。なお、本実施形態では、通常通紙ガイド70がアップ状態を基本としているが、本発明の趣旨はこれに拘束されるものではなく、通紙ガイドの通常状態をダウン状態としても良い。すなわち、通常の待機状態をリフト機構の第3ポジションあるいは第4ポジションとしておき、メインASF37からの給紙動作時に第1ポジションに移動するように構成することも可能である。このように構成することにより、剛性の強い被記録媒体を排紙ローラ側から挿入する際に、円滑に挿入することが可能となる。以上が、被記録用紙4の表面記録終了から自動両面ユニット2への搬送過程の説明である。
Further, since the
図13は、用紙反転部もしくは自動反転部としての自動両面ユニット2の通紙パス及び搬送用ローラの設置状態を示す模式的側断面図である。次に、図13を参照して、自動両面ユニット2の内部の被記録用紙搬送形態について説明する。図13において、101は自動両面ユニット2の構造体及び用紙搬送経路の一部を構成する両面ユニットフレーム、102は両面ユニットフレーム101の内部に固定され用紙搬送経路の一部を構成する内ガイド、103は両面ユニットフレーム101の後方に開閉自在に配され用紙搬送経路の一部を構成するリアカバー、105は切替フラップ(可動フラップ)104を所定方向に付勢する切替フラップばね、107は出口フラップ106を所定方向に付勢する出口フラップばね、110は両面ローラA108のゴム部分である両面ローラゴムA、111は両面ローラB109のゴム部分である両面ローラゴムBである。
FIG. 13 is a schematic cross-sectional side view showing the installation state of the sheet passing path and the conveying roller of the
図12の(c)の状態から被記録用紙4が自動両面ユニット2に搬送されてきた時、出口フラップ106は出口フラップばね107の作用により図13に示す位置に付勢されているため、導入路は一意に決められる。このため、被記録用紙4は図13中の矢印a方向に進行していく。次に、被記録用紙4は可動フラップである切替フラップ104に当たるが、通常の両面記録が可能な被記録用紙の場合には、切替フラップ104が回転しないように切替フラップばね105の荷重が設定されているため、被記録用紙4は切替フラップ104と両面ユニットフレーム101との間の通紙経路に沿って進行する。そのまま被記録用紙4の記録済み面(表面)が両面ローラB109の両面ローラゴムB111に当接し、未記録面(裏面)が高潤滑性の高分子樹脂でできた両面ピンチローラB113に当接する方向で、両者の間に挟持されていく。
When the
この時、後述する駆動機構により、両面ローラA108及び両面ローラB109と紙送りローラ21の周速度は略同一に回転するように設定されているので、被記録用紙4と両面ローラB109の間に滑りを生じることなく搬送されていく。また、周速度が略同一であることにより、被記録用紙4が弛んでしまったり、張力がかかった状態になることもない。両面ローラB109により進行方向を変えられると、被記録用紙4はリアカバー103に沿って進行し、同様に両面ローラA108の両面ローラゴムA110と両面ピンチローラA112との間に挟持されていく。
At this time, since the peripheral speeds of the double-
再度、両面ローラA108により進行方向を変えられて、被記録用紙4は図13中の矢印b方向に搬送される。これらの両面ローラA108及び両面ローラB109は被記録媒体4の表裏もしくは搬送方向を反転させるための反転ローラを構成している。そのまま被記録用紙4が進行すると、被記録用紙4の先端が出口フラップ106に当接する。出口フラップ106は非常に弱い荷重の出口フラップばね107によって付勢されているので、被記録用紙4自身が出口フラップ106を押しのけて自動両面ユニット2を出ていく。被記録用紙4の進行方向先端が出口フラップ106を出ていく時には、被記録用紙4の進行方向後端は既に出口フラップ106の下を通過するように自動両面ユニット2内の通紙パス長が設定されているので、被記録用紙4自身の先端部と後端部とが擦れ合うことはない。
Again, the traveling direction is changed by the double-sided roller A108, and the
なお、詳細なフローチャートは後述するが、被記録用紙4の表面に記録を行う際に、PEセンサレバー66により被記録用紙長を測定することが可能なので、紙送りローラ21から両面ローラB109までの距離、あるいは両面ローラA108から紙送りローラ21までの距離より短い被記録用紙や、自動両面ユニット2の出口フラップ106から一周して出口フラップ106まで戻ってくる距離よりも長い被記録用紙が挿入された際には、表面の記録が終了した段階で警告を出し、自動両面ユニット2へ被記録用紙4を搬送することなく排紙してしまうように構成されている。
Although a detailed flowchart will be described later, when recording on the surface of the
ここで、被記録用紙4の記録済み面を両面ローラゴムA110及び両面ローラゴムB111側にして搬送する理由について説明する。両面ローラゴムA110や両面ローラゴムB111は駆動側であり、両面ピンチローラA112や両面ピンチローラB113は従動側であるので、被記録用紙4は駆動側ローラに追従して搬送され、従動側は被記録用紙4との摩擦力により回転させられることになる。この時、両面ピンチローラA112や両面ピンチローラB113を支持する回転軸の軸損が十分に小さければ良いが、何らかの原因で軸損が上昇した場合、被記録用紙4と両面ピンチローラA112や両面ピンチローラB113との間で滑りが生じる可能性がある。被記録用紙4に記録された部分は、ローラとの当接によりインクが転写しない程度には乾燥しているが、擦られた場合には被記録用紙4の表面からインクが剥離してしまう可能性もある。
Here, the reason why the recorded surface of the
もし、被記録用紙4の記録済み面が両面ピンチローラA112や両面ピンチローラB113側に接していて、それらのローラとの間で滑りが生じた場合、記録済み面のインクが剥離してしまう可能性がある。それを防止するために、本実施形態のように、記録済み面(表側)側に駆動側部材が当接するようにし、未記録面(裏面)側に従動部材が当接するような配置になっている。さらに、配置上の別の理由として以下の理由も挙げられる。すなわち、駆動側の両面ローラA108あるいは両面ローラB109は、被記録用紙4の屈曲半径により制約があるため、ある程度以下の直径にすることはできないが、両面ピンチローラA112や両面ピンチローラB113は小径化することが可能であるので、自動両面ユニット2をコンパクトに設計するためには、両面ピンチローラA112や両面ピンチローラB113を小径に設計することが多い。
If the recorded surface of the
また、基本的には被記録用紙4の記録済み面からインクがローラ側に転写しないが、ほんの少量ずつ転写して、記録済み面に当接するローラが徐々にインクで汚されていくことがある。小径化されたローラの場合は、ローラ外周が被記録用紙と接触する頻度が高くなるため、大径のローラに比べて汚れていく速度が速くなるので、小径ローラは汚れに対して不利であると言える。以上より、本実施形態においては、装置の小型化とローラの汚れの観点から、被記録用紙の記録済み面(表面)に当接する側に、直径の大きい両面ローラA108及び両面ローラB109を置く配置としている。
Basically, the ink is not transferred from the recorded surface of the
さらにまた、配置上の別の理由として以下の理由も挙げられる。すなわち、片方が駆動される一対のローラで用紙を挟持、搬送する場合には、搬送量を正確にするために駆動側を摩擦係数の高い材質とし、従動側を摩擦係数の低い材質とし、ニップ部の面積(ニップ面積)を稼ぐためにどちらかを弾性素材にすることが多い。通常は、比較的低コストで高い摩擦係数が得られ、弾性にも富んでいるゴム類素材(ゴム状弾性材)を駆動側材質とするのが普通である。また、搬送力を増すために、エラストマー等を含むゴム類の表面に研磨を施し、故意に研磨目の微小な凹凸を付ける手段もよく用いられる。この場合は、従動側を表面の摩擦係数が比較的小さい高分子樹脂で作ることが一般的である。 Furthermore, the following reason is also mentioned as another reason for arrangement. That is, when a sheet is sandwiched and transported by a pair of rollers driven on one side, the driving side is made of a material with a high friction coefficient and the driven side is made of a material with a low friction coefficient in order to make the transport amount accurate, and the nip In order to increase the area of the part (nip area), one of them is often made of an elastic material. Usually, a rubber material (rubber-like elastic material) that has a high friction coefficient at a relatively low cost and is rich in elasticity is usually used as the drive side material. Further, in order to increase the conveying force, a means is often used in which the surface of rubber containing an elastomer or the like is polished and intentionally provided with fine irregularities on the polishing eyes. In this case, the driven side is generally made of a polymer resin having a relatively small surface friction coefficient.
微小な凹凸の付いたゴム類と平滑な高分子樹脂の表面とを比較した場合、被記録用紙の記録済み面に当接させると、どちらもインクの汚れが付着するが、微小な凹凸の付いたゴム類ではその凹凸で汚れを保持するため、再度被記録用紙に汚れを転写することが少ないのに対し、平滑な高分子樹脂では汚れが剥離して被記録用紙に再転写することがあるので、ゴム類を被記録用紙の記録済み面に当接させる方が有利であると言える。以上より、本実施例においては、被記録用紙の記録済み面(おもて側の面、おもて側)に当接する側にゴム類素材のローラを配し、未記録面(裏面、裏側)に当接する側に高分子樹脂素材のローラを配するようにしている。以上が、通常の被記録用紙を両面記録するための反転動作の説明である。 When comparing rubber with fine irregularities with the surface of a smooth polymer resin, ink contacts will adhere to the recorded surface of the recording paper, but both will have fine irregularities. In rubbers, dirt is held by the unevenness, so that the dirt is hardly transferred again to the recording paper. On the other hand, the smooth polymer resin may peel off the dirt and retransfer to the recording paper. Therefore, it can be said that it is more advantageous to bring the rubber into contact with the recorded surface of the recording paper. As described above, in this embodiment, the rubber material roller is arranged on the side that contacts the recorded side (front side, front side) of the recording paper, and the unrecorded side (back side, back side) A roller made of a polymer resin material is arranged on the side abutting on (). The above is the description of the reversal operation for performing double-side recording on a normal recording sheet.
次に、自動両面記録は行わないで、剛性の高い被記録媒体に記録を行いたい場合の自動両面ユニット2の動作を説明する。剛性の高い被記録媒体とは、例えば、厚さが2mm〜3mmあるような厚紙とか、円板状や異形の被記録媒体を所定トレイに載せて搬送したりする場合が想定される。そのような被記録媒体は剛性が高いので、自動両面ユニット2の両面ローラ直径に倣う程には湾曲できないので、自動両面記録を行うことはできないが、自動両面ユニット2を記録装置に装着したままの状態でそのような被記録媒体に記録を行いたい状況はあり得る。被記録媒体の剛性が高い場合には、メインASF37を利用して給紙することもできないので、その場合は、ストレートな通紙パスを用いるために、排紙ローラ側から紙送りローラ21側に向かって被記録媒体を給紙する。その際の自動両面ユニット2の動作を以下に説明する。
Next, the operation of the
図14は、切替フラップ104の動作を説明する模式的側断面図である。図14の(a)は、前述の通常の被記録用紙(被記録媒体)を使用して自動両面記録を行う場合の状態を示す。この時は、切替フラップばね105は、被記録用紙4の押圧力に抗してストッパに切替フラップ104を付勢し続けるので、被記録用紙4は反転させる通紙パスに案内(ガイド)される。
FIG. 14 is a schematic side sectional view for explaining the operation of the
図14の(b)は、剛性の高い被記録媒体(被記録用紙を含む)を使用した場合の状態を示す。剛性の高い被記録媒体4が自動両面ユニット2に搬送されると、被記録媒体は出口フラップ106の下を通って切替フラップ104に当接する。切替フラップばね105は、剛性の高い被記録媒体が挿入され切替フラップ104を押圧すると、その押圧力で切替フラップ104を退避させていく程度のばね荷重に設定されているので、剛性の高い被記録媒体の進行に従って図14の(b)中の反時計方向(矢印方向)に回転して退避する。そのため、剛性の高い被記録媒体は、両面ローラA108と両面ローラB109との間に設けられた第2の通紙パスである退避パス131に導かれる。リアカバー103の退避パス131に相当する部位には孔(通孔、開口)が開けられているので、長尺な剛性の高い被記録媒体を使用した場合でも、自動両面ユニット2に干渉して搬送が制限されることはない。
FIG. 14B shows a state in which a recording medium with high rigidity (including recording paper) is used. When the
なお、本発明の趣旨は図14の(b)を参照して説明した上記構成に拘束されるものではない。すなわち、本発明の実施に際しては、上下2本の両面ローラ108、109の間に退避パス131を設けることは必須ではなく、以下のように構成することも可能である。図22は、略水平パスの上方に、大径の両面ローラを配置して構成された自動両面ユニットを示す模式的側断面図である。図22において、切替フラップ104は不図示の切替フラップばねにより図22に示す位置に付勢されており、その切替フラップばねのばね力(押圧力)は剛性の高い被記録用紙が当接した際に切替フラップ104が回転できるような荷重に設定されている。図22においても、図13及び図14中の各部に対応する部分をそれぞれ同じ符号で示し、それらの詳細については、前述の説明を参照することにし、ここでは詳細説明は省略する。
The gist of the present invention is not limited to the above-described configuration described with reference to FIG. That is, in carrying out the present invention, it is not essential to provide the
よって、剛性の低い被記録用紙の場合は、両面ローラA108の図22中の矢印c方向の回転により、被記録用紙は図22中の矢印a方向へ進行するが、剛性の高い被記録媒体の場合は、切替フラップ104を押し退けて、図22中の矢印b方向の退避パス131へ進行する。これにより、長尺な剛性の高い被記録媒体を使用しても、自動両面ユニットに干渉して搬送が制限されることはない。以上により、本実施形態の自動両面ユニットにおいては、自動両面ユニットを取り外すことなく、剛性が高く湾曲できない被記録媒体(被記録用紙を含む)への片面記録を行うことも可能である。以上が、2通りの通紙パスを持つ自動両面ユニット2の説明である。
Therefore, in the case of a recording sheet with low rigidity, the recording sheet advances in the direction of arrow a in FIG. 22 due to the rotation of the double-sided roller A108 in the direction of arrow c in FIG. In this case, the switching
次に、自動両面ユニット2のローラ類の駆動機構について説明する。図15は、本発明を適用した記録装置の一実施例(図1)を図2とは反対側から見て自動両面ユニット2のローラ類の駆動機構の構成を示す模式的側断面図である。図15において、115はLFモータ26から両面太陽ギア116まで動力を伝達する両面伝達ギア列、116は両面振り子アームの中心にある両面太陽ギア、117は両面太陽ギア116を回転中心として揺動可能な両面振り子アーム、118は両面振り子アーム116に回転可能に取り付けられ両面太陽ギア116と契合した両面遊星ギアA、119は同じく両面遊星ギアB、である。
Next, the driving mechanism for the rollers of the
図15において、120は両面太陽ギア116とアイドラを介して契合するスパイラル溝ギア、121は両面遊星ギアと契合する反転ディレイギアA、122は反転ディレイギアA121と同軸にある反転ディレイギアB、123は反転ディレイギアA121と反転ディレイギアB122との間相対的な付勢力を与える反転ディレイギアばね、124は2つの両面ローラギアを接続する両面ローラアイドラギア、125は両面ローラA108に固定された両面ローラギアA、126は両面ローラB109に固定された両面ローラギアB、127はスパイラル溝ギア120の溝に契合して揺動するストップアーム、128はストップアーム127をセンタリングするストップアームばね、132は両面振り子アーム117に取り付けられた両面振り子アームばね、である。
In FIG. 15, 120 is a spiral groove gear engaged with the double-
前述のごとく、本実施形態では、自動両面ユニット2の駆動力は、紙送りローラ21を駆動するLFモータ26より得ている。このような構成にすることにより、紙送りローラ21と両面ローラA108あるいは両面ローラB109とが協働して被記録用紙を搬送する際に、起動停止のタイミング及び被記録用紙搬送速度をほぼ完全に同期させることができ、このような構成を採るのが好適である。LFモータ26からの駆動力は、両面伝達ギア列115を介して両面太陽ギア116まで伝達される。両面太陽ギア116には、揺動自在な両面振り子アーム117が取り付けられ、更に両面振り子アーム117には両面遊星ギアA118と両面遊星ギアB119が取り付けられている。
As described above, in the present embodiment, the driving force of the
両面太陽ギア116と両面振り子アーム117との間には、適度な摩擦力が働くように構成されているので、両面太陽ギア116の回転方向に従って両面振り子アーム117が揺動する。ここで紙送りローラ21が被記録用紙を排紙方向に搬送する方向にLFモータ26を回転させる方向を正方向、自動両面ユニット2側へ被記録用紙を搬送する方向を逆方向とすると、LFモータ26が正方向に回転したときには、両面太陽ギア116は図15中の矢印a方向に回転する。両面太陽ギア116の回転に伴って、両面振り子アーム117も基本的に図15中の矢印a方向に揺動する。
Since an appropriate frictional force acts between the double-
すると、両面遊星ギアA118が両面ローラアイドラギア124に契合し、両面ローラアイドラギア124を回転させる。両面ローラアイドラギア124の回転に伴い、両面ローラギアA125が図15中の矢印c方向へ回転し、同じく両面ローラギアB126が図15中の矢印d方向へ回転する。図15中の矢印c方向及び矢印d方向は、両面ローラA108及び両面ローラB109がそれぞれ自動両面ユニット2内で被記録用紙を搬送する方向である。
Then, the double-sided
LFモータ26が逆方向に回転したときは、両面太陽ギア116は図15中の矢印b方向に回転する。両面太陽ギア116の回転に伴って、両面振り子アーム117も基本的に図15中の矢印b方向へ揺動する。すると、両面遊星ギアB119が反転ディレイギアA121に契合する。反転ディレイギアA121と反転ディレイギアB122は、相対するスラスト面から互いに突起が突出しており、反転ディレイギアB122を固定して考えた時、反転ディレイギアA121を1回転させると突起同士が噛み合うクラッチの役割を果している。
When the
両面遊星ギアB119が反転ディレイギアA121に契合する前は、反転ディレイギアA121と反転ディレイギアB122との間は、反転ディレイギアばね123により前記突起同士が離れる方向に付勢されているため、反転ディレイギアA121が回転開始してから略一回転した後に、反転ディレイギアB122が回転を開始する。このようにLFモータ26が逆転方向に回転を開始してから、反転ディレイギアB122が回転を開始するまでの期間が、両面ローラA108及び両面ローラB109が停止しているディレイ期間となる。
Before the double-sided planetary gear B119 engages with the reverse delay gear A121, the reverse
反転ディレイギアB122が回転すると、両面ローラアイドラギア124を介して、両面ローラギアAを図15中の矢印c方向へ、両面ローラギアBを図15中の矢印d方向へと回転させる。これは、LFモータ26を正方向に回転させたときの回転方向と同じ方向である。このような機構により、LFモータ26の回転方向に係わらず、両面ローラA108及び両面ローラB109を常に被記録用紙搬送方向に回転させることができる。
When the reverse delay gear B122 rotates, the double-sided roller gear A is rotated in the direction of arrow c in FIG. 15 and the double-sided roller gear B is rotated in the direction of arrow d in FIG. 15 via the double-sided roller
ここで、スパイラル溝ギア120の作用について説明する。スパイラル溝ギア120は、外周にギア面が形成され、片方の端面に最内周及び最外周に無限軌道を備えた螺旋状の溝が切られたカムが形成されているものである。このスパイラル溝ギア120は、本実施形態においては、アイドラギアを介して両面太陽ギア116と直結しているので、両面太陽ギア116と同方向に同期して回転している。スパイラル溝ギア120の溝には、ストップアーム127の一部であるフォロワーピン127aが契合しているので、スパイラル溝ギア120の回転に伴ってストップアーム127は揺動する。例えば、スパイラル溝ギア120が図15中の矢印e方向に回転すると、フォロワーピン127aが内周に引き込まれるので、ストップアーム127は図15中の矢印g方向に揺動する。そのままスパイラル溝ギア120が図15中の矢印e方向に回転し続けても、フォロワーピン127aは最内周の無限軌道に入るので、ストップアーム127は所定位置で停止する。
Here, the operation of the
逆に、スパイラル溝ギア120が図15中の矢印f方向に回転すると、フォロワーピン127aが外周に向けて移動するので、ストップアーム127は図15中の矢印h方向に揺動する。こちらも同様に、スパイラル溝ギア120が図15中の矢印f方向に回転し続けると、フォロワーピン127aは最外周の無限軌道に入り、ストップアーム127は所定位置で停止する。なお、スパイラル溝ギア120の回転方向が変わった時に、最外周及び最内周の無限軌道から螺旋状溝に円滑に移動できるように、ストップアーム127の移動範囲中央付近をセンターとしてセンタリングするストップアームばね128がストップアーム127に取り付けられている。
Conversely, when the
このような動作をするストップアーム127は、両面振り子アーム117に取り付けられた両面振り子アームばね132に作用する。両面振り子アームばね132は、両面振り子アーム117に取り付けられ、ストップアーム127方向に伸びた弾性部材である。また、両面振り子アームばね132の先端は、常にストップアーム127よりもスパイラル溝ギア120の中心方向に位置している。
The
このような位置関係により、LFモータ26が正方向に回転した時に、次のような作用与える。すなわち、LFモータ26が逆方向に回転して被記録用紙4を自動両面ユニット2に搬送し、表裏反転させて被記録用紙4が紙送りローラ21まで戻ってきた時、スパイラル溝ギア120に対して、ストップアーム127は最外周の無限軌道を回転している。その後、LFモータ26を正方向に回転させて裏面の記録を行っている際には、ストップアーム127はスパイラル溝ギア120の内周に向かって移動してくる。LFモータ26が正方向に回転している時は、両面振り子アーム117は図15中の矢印a方向に揺動して動力伝達しているので、ストップアーム127が内周に向かってくる途中で両面振り子アームばね132と当接する。
With such a positional relationship, when the
更にLFモータ26が正方向に回転すると、ストップアーム127は更に内周に移動して両面振り子アームばね132を弾性変形させるので、両面振り子アーム117は、両面遊星ギアA118と両面ローラアイドラギア124の歯面同士が噛み合う時に圧力角方向に作用する力及び両面振り子アーム117を図15中の矢印a方向に揺動させる力と、両面振り子アームばね132の反発力の力のバランスで両面振り子アーム117の姿勢が決まることになる。本実施形態の場合は、両面振り子アームばね132の反発力を小さく設定してあるので、ストップアーム127が最内周の無限軌道に入った位置にいても、両面振り子アームばね132を弾性変形させるだけで、両面遊星ギアA118と両面ローラアイドラギア124の間の動力伝達は継続して行われる。
When the
LFモータ26の動作が間欠的な駆動で回転、停止を繰り返している時の停止状態となっても、両面遊星ギアA118と両面ローラアイドラギア124の歯面同士は重なったままなので、両者の噛み合いが外れることはない。しかし、被記録用紙4の裏面の記録が終了して、自動両面ユニット2への駆動伝達が不要になったときには、LFモータ26の負荷が低減する点から駆動を切断した方が好ましい。よって、駆動伝達を切断したい場合には以下の手段が実施される。
Even when the operation of the
すなわち、ストップアーム127が最内周の無限軌道に入っていて、両面振り子アームばね132が弾性変形している状態で、少しだけLFモータ26を逆方向に回転させる。両面振り子アームばね132の反発力によって両面振り子アーム117は図15中の矢印b方向に回ろうとしているところを両面遊星ギアA118と両面ローラアイドラギア124の歯面同士の重なりによって止めている状態から、歯面同士の重なりを外す方向の回転を与えるので、両面振り子アーム117は一気に図15中の矢印b方向へと回転する。
That is, the
一度、両面振り子アーム117が図15中の矢印b方向へ回転してしまうと、弾性変形していた両面振り子アームばね132が元の形状に戻るので、LFモータ26を正方向に回転させても両面振り子アームばね132とストップアーム127が干渉するため、両面遊星ギアA118と両面ローラアイドラギア124が噛み合う位置まで両面振り子アーム117は揺動できない。よって、この状態からは、所定量のLFモータ26の逆方向回転を経ないと、自動両面ユニット2内の両面振り子アーム117以降に駆動力は伝達されない。両面振り子アーム117までの駆動は、単にギア列を回転させるだけなので、LFモータ26に掛かる負荷は僅少であり、自動両面ユニット2が付いていない場合の負荷と殆ど差がない。
Once the double-
なお、ストップアーム127が最内周の無限軌道にある状態から、LFモータ26が逆方向に回転した場合には、両面振り子アームばね132とストップアーム127の間には何も作用を及ぼさないので、前述の如く反転ディレイギアA121へ駆動伝達することができる。以上が、自動両面ユニット2のローラ類駆動機構の概略説明である。
When the
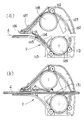
図16は、図15の自動両面ユニット2のローラ類駆動機構の動作を説明するための模式的側断面図であり、図20は自動両面記録の動作シーケンスを示すフローチャートである。次に、自動両面ユニット2のローラ類駆動機構の動作並びに自動両面記録の動作の詳細を図20のフローチャートを併用して説明する。図16及び図20において、自動両面記録が開始されると、ステップS1で被記録用紙4の給紙が行われる。例えば、メインASF37などから紙送りローラ21に向けて被記録用紙4が供給される。次に、ステップS2で表面(おもて面)の記録が行われる。これは、片面のみの記録の場合と同様の動作である。この時のローラ類駆動機構の状態は図16の(a)に示す状態である。
FIG. 16 is a schematic side sectional view for explaining the operation of the rollers driving mechanism of the
図16の(a)は、自動両面ユニット2の駆動機構を初期化した後に、LFモータ26が正方向に回転中の状態を示している。すなわち、自動両面記録時の表面(おもて面)記録動作中や、自動両面記録を使用しない通常の記録動作中などの状態を示している。ストップアーム127のフォロワーピン127aはスパイラル溝ギア120の最内周の無限軌道にあるので、両面振り子アーム117が図15中の矢印a方向に揺動しようとすると、両面振り子アーム117はストップアーム127に当接して、それ以上回転できず、両面遊星ギアA118が両面ローラアイドラギア124と契合できないので、LFモータ26からの駆動力は両面ローラギアA125及び両面ローラギアB126に伝達されない。この状態では、両面ピンチローラA112あるいは両面ピンチローラB113の圧力を受けて軸損が発生している両面ローラA108あるいは両面ローラB109が回転しないので、LFモータ26が受ける負荷は少ない。
FIG. 16A shows a state in which the
次に、ステップS3で、表面記録が終了した時点でPEセンサ67で被記録用紙後端を検知できたかどうかを確認する。この時、まだPEセンサ67が被記録用紙4有りを検知していたら、まだ被記録用紙4の表面後端を検知できていないので、ステップS4で、そのままLFモータ26を正方向に回転させ、被記録用紙4の表面後端がPEセンサレバー66を通過して更に少し行った位置p2まで移動させる。次に、ステップS5で、PEセンサ67が被記録用紙4の表面先端を検知してから表面後端を検知するまでに被記録用紙4を搬送した量から、被記録用紙4の長さを計算する。
Next, in step S3, it is confirmed whether or not the trailing edge of the recording paper has been detected by the
前述のように、被記録用紙4の長さが所定長L1よりも短い場合は、紙送りローラ21から両面ローラB109あるいは両面ローラA108から紙送りローラ21までの搬送の間にローラに届かなくなってしまうため、自動両面記録動作から除外することが必要である。また、被記録用紙4の長さが所定長L2よりも長い場合は、被記録用紙の記録済み面同士が紙送りローラ21から自動両面ユニット2までの通紙パス中で交差してしまうことになり好ましくないので、自動両面記録動作から除外することが必要である。この条件で、自動両面記録動作から除外する判断をした場合は、ステップS6に進み、LFモータ26を正方向に回転させて、そのまま被記録用紙4を排紙してしまう。条件に適合した場合は、次にステップS7に進み、リフト機構を第3ポジションとしてピンチローラ22をリリース(離脱)させる。
As described above, when the length of the
次に、ステップS8で、被記録用紙4の表面後端がすでにピンチローラ22の近傍の位置p1よりも下流側まで搬送されてしまっているかどうかを確認する。すでに下流側まで送られてしまっている場合は、ピンチローラ22を圧接状態に戻した時に、確実に紙送りローラ21とピンチローラ22に挟持されるように、ステップS9で、表面後端がp1にくるまで、LFモータ26を逆方向に回転させてバックフィードする。この時のローラ類駆動機構の状態は、図16の(b)に示す状態である。また、ステップS2からステップS8にかけては、なるべく動作が停止しないようにし、前述の如く、被記録用紙4が変形する前にステップS9を実施することが望ましい。なお、表面後端がp1より上流側にある場合は、そのままピンチローラ22を圧接すれば確実に被記録用紙を挟持することが可能なので、そのままステップS10に進む。
Next, in step S8, it is confirmed whether or not the rear end of the front surface of the
図16の(b)は、LFモータ26の逆方向の回転が開始した直後の状態を示す。すなわち、自動両面記録の表面記録終了後にバックフィードが開始された直後や、メインASF37からの給紙後の頭出し量調整のためにLFモータ26を逆転させた場合などである。この時は、両面振り子アーム117が図15中の矢印b方向に揺動しようとするのを妨げるものは何もないので、両面遊星ギアB119が反転ディレイギアA121に契合する。それに伴い、反転ディレイギアA121は回転を開始するが、略1回転するまでは反転ディレイギアB122には駆動力が伝達されないので、両面ローラアイドラギア124は回転せず、両面ローラA108及び両面ローラB109は動作しない。
FIG. 16B shows a state immediately after the
よって、この状態でもまだLFモータ26が受ける負荷は少ない。このような状態を設定しているのは、自動両面記録時に被記録用紙4をバックフィードさせた時に、紙送りローラ21から両面ローラB109までは距離があるので、被記録用紙4の先端が両面ローラB109に到達するまでは、両面ローラB109は回転する必要がないためである。また、前述の如く、通常記録時の頭出し量調整時などに、不要に両面ローラA108あるいは両面ローラB109が回転しないようにするためである。
Therefore, even in this state, the load applied to the
次に、ステップS10で、被記録用紙4の表面の記録済みインクが乾燥するまで待機する時間を設ける。必要乾燥時間は前述のように幾つかの要因により変動するので、乾燥待機時間t1は可変のパラメータとすることが可能である。具体的には、被記録用紙の種類、インクの種類、インクの重ね打ち込み方法、インクの単位面積あたりの打ち込み量、環境温度、環境湿度、環境風速、等の条件を勘案してt1を決定する。次に、ステップS11でリフト機構を第4ポジションにする。これにより、紙送りローラ21とピンチローラ22で再度被記録用紙4を挟持する。
Next, in step S10, a waiting time is provided until the recorded ink on the surface of the
次に、ステップS12で乾燥待機時間t2を設けている。これは、ステップS10で乾燥待機時間t1を実施した場合には使用しなくても良く、t2=0として次のステップに進むことも可能である。t2を使用するのは、例えば、被記録用紙4の後端部に記録動作を行っておらず、余白部分が存在している場合で、その時はステップS10でt1=0として直ぐに余白部分にピンチローラ22を圧接するように制御しても、何ら支障がないからである。しかし、そのまま直ぐにバックフィードして被記録用紙4の搬送を行うと、乾燥前のインクがピンチローラ22に転写してしまう可能性があるので、ここで乾燥待機時間t2を使用すれば良い。
Next, a drying standby time t2 is provided in step S12. This may not be used when the drying standby time t1 is performed in step S10, and it is possible to proceed to the next step with t2 = 0. The reason for using t2 is, for example, when the recording operation is not performed at the rear end portion of the
次に、ステップS13で、LFモータ26を逆方向に回転させ、被記録用紙を所定量x1だけバックフィードする。このステップで被記録用紙4を自動両面ユニット2まで搬送し、表裏反転させる。このステップが終了すると、裏面先端は紙送りローラ21より少し手前まで戻ってきている。ここまでのローラ類駆動機構の状態が、図16の(c)で示す状態である。
Next, in step S13, the
図16の(c)は、更にLFモータ26を逆方向に回転させ続けた場合の状態を示している。すなわち、被記録用紙4をバックフィードして自動両面ユニット2で反転させている間の状態である。図16の(b)の状態以降、反転ディレイギア121が略1回転すると、反転ディレイギアA121のスラスト方向に突出した突起が、対向して設けられた反転ディレイギアB122の突起に契合し、反転ディレイギアA121と反転ディレイギアB122が一体となって回転を始める。反転ディレイギアB122が回転を始めると、反転ディレイギアB122は両面ローラアイドラギア124と常時契合しているので、両面ローラアイドラギア124および両面ローラギアA125、両面ローラギアB126が回転する。これにより、両面ローラA108は図15中の矢印c方向に、両面ローラB109は図15中の矢印d方向にそれぞれ回転する。
FIG. 16C shows a state in which the
次に、裏面先端を紙送りローラ21とピンチローラ22のニップ部に挟持させる際の、いわゆるレジストレーション動作について説明する。先ず、ステップS14で現在使用している被記録用紙4が剛性の弱い薄い用紙か、剛性の強い厚い用紙かによって制御を切り替える。被記録用紙4の剛性の判断は、プリンタドライバ等でユーザが設定する記録用紙の種類によっても良いし、被記録用紙の厚みを測定する検知手段を使用して判断しても良い。なお、ここで制御を2つに分けるのは、被記録用紙の剛性により被記録用紙4を撓ませてループを作った際の挙動が異なるからである。
Next, a so-called registration operation when the tip of the back surface is sandwiched between the nip portion of the
先ず、比較的剛性の弱い薄い被記録用紙の場合を説明する。図18は、薄い被記録用紙を使用した場合の裏面先端レジストレーション動作を示す模式的側断面図である。図20及び図18において、ステップS13でのLFモータ26の逆方向回転により、図18の(a)の用紙反転搬送が行われる。ステップS13が終了すると、被記録用紙裏面先端は、おおよそ通紙ガイド70の近辺に戻ってきている。薄い被記録用紙の場合は、次にステップS15に進む。ステップS15では、リフト機構を動作させて、第1ポジションに移行させる。これにより、通紙ガイド70を上昇させる。
First, the case of a thin recording paper having relatively low rigidity will be described. FIG. 18 is a schematic side cross-sectional view showing the back surface tip registration operation when a thin recording paper is used. 20 and 18, the reverse paper conveyance of FIG. 18A is performed by the reverse rotation of the
図18の(b)はステップS15が終了した状態を示す。前述のように紙送りローラ21の中心に対してピンチローラ22の中心は若干のオフセットを持って第1排紙ローラ30側に配置されているので、紙送りローラ21とピンチローラ22のニップ(部)は、被記録用紙4が搬送されてきた略水平線に対して若干の角度を持っている。レジストレーション動作前に通紙ガイド70を上昇位置に戻すことにより、被記録用紙4の裏面先端をこの傾いたニップ部に円滑に導くことが可能となる。次に、ステップS16で、LFモータ26を逆方向に回転させ、更に被記録用紙4を紙送りローラ21へ向けて搬送する。次に、ステップS17で、PEセンサ67で被記録用紙4の裏面先端を検知する。裏面先端が検知できたら、ステップS18へ進む。
FIG. 18B shows a state where step S15 has been completed. As described above, the center of the
次に、ステップS18で、PEセンサ67による裏面先端検知位置から紙送りローラ21までの距離より少しだけ長い距離x2だけ被記録用紙4を搬送する。これにより、被記録用紙4の裏面先端は紙送りローラ21とピンチローラ22のニップ部まで到達し、更に余分に搬送された分は被記録用紙4が撓んで、ループが形成される。図18の(c)は、ステップS18が終了したときの状態を示す。通紙ガイド70を上昇位置としたことにより、通紙パスの高さ方向隙間は少なくなっているが、被記録用紙4の剛性が比較的低いので、ループは容易に形成され用紙を押すので、逆転を続ける紙送りローラ21とピンチローラ22のニップ部に被記録用紙4の裏面先端部が倣って紙送りローラ21と平行になり、いわゆるレジストレーション動作が完了する。次に、ステップS19で、LFモータ26の回転方向を正方向回転に転じさせ、被記録用紙4の裏面先端をニップ部で挟持し、所定距離x3だけ搬送して、裏面記録開始の準備を完了する。
Next, in step S18, the
次に、比較的剛性の強い厚い被記録用紙(被記録媒体)の場合を説明する。図19は厚い被記録用紙を使用した場合の裏面先端レジストレーション動作を示す模式的側断面図である。図19の(a)は、図18の(a)と同様にステップS13の途中の状態を示し、図19の(b)はステップS13が終了したときの状態を示す。次に、ステップS20で、通紙ガイド70が第2のポジションである下降位置に位置したままLFモータ26を逆方向に回転させ、ステップS13で停止した位置の被記録用紙4の裏面先端から紙送りローラ21のニップまでの距離よりも少しだけ長い距離x4だけ被記録用紙4を搬送する。これによって、薄い被記録用紙の場合と同様に、被記録用紙4の裏面先端は逆転している紙送りローラ21のニップ部に到達し、更に用紙が押し込まれた分でループが形成されるので、被記録用紙4の裏面先端は紙送りローラ21と平行になり、レジストレーション動作が完了する。図19の(c)はステップS20が終了したときの状態を示す。
Next, the case of a thick recording paper (recording medium) having relatively high rigidity will be described. FIG. 19 is a schematic cross-sectional side view showing the back surface tip registration operation when a thick recording paper is used. FIG. 19A shows a state in the middle of step S13 as in FIG. 18A, and FIG. 19B shows a state when step S13 is completed. Next, in step S20, the
次に、ステップS21で、LFモータ26の回転方向を正方向に転じさせ、被記録用紙4の裏面先端をニップ部で挟持し、所定距離x3だけ搬送して、裏面記録開始の準備をする。なお、ステップS19あるいはステップS21にて、それまで逆方向回転をしていたLFモータ26が正方向回転に回転方向を転じる。この時、両面振り子アーム117は、図15中の矢印a方向へと揺動する。すると、両面遊星ギアB119と反転ディレイギアA121との契合が外れる。LFモータ26の逆方向回転時は、反転ディレイギアA121と反転ディレイギアB122が突起によって契合されていたが、同時に、両者の間に挟まれた捩じりコイルばねである反転ディレイギアばね124が圧縮された状態になっているが、反転ディレイギアA121がフリー状態になることにより、反転ディレイギアばね124が伸張するため、反転ディレイギアA121は略1回転反転し、初期状態に戻る。
Next, in step S21, the rotation direction of the
次に、ステップS22で、リフト機構を第1ポジションとし、裏面記録開始の準備を完了する。ここで、厚い被記録用紙を使用する場合に、レジストレーション動作を行う間、通紙ガイド70を下降位置としている理由を説明する。薄い被記録用紙の場合と同様、図18の(c)のようにしてループを生成しようとした場合、被記録用紙の剛性が強いため、ニップ部に到達する前から被記録用紙4はピンチローラホルダ23に沿って搬送されてしまう。これにより、被記録用紙がニップ部に到達した後に更に搬送されてループを生成しようとしても、すでにループ生成スペースが無くなっており、ループが生成されない。そのため、上手くレジストレーションが取れない場合があり得るためである。
Next, in step S22, the lift mechanism is set to the first position, and preparation for starting the back side recording is completed. Here, the reason why the
また、ループが生成されないと、両面ローラA108と紙送りローラ21との間で同時に挟持された被記録用紙にたるみ(弛み)ができない。これは、本実施例のように、両面ローラ類駆動機構に両面振り子アーム117のような機構を用いる場合、ステップS20におけるLFモータ26の逆転からステップS21におけるLFモータ26の正転に至る間に、両面振り子アーム117が揺動する時間が必要になり、その期間では両面ローラA108及び両面ローラB109が停止してしまう。
Further, if the loop is not generated, the recording paper sandwiched between the double-
紙送りローラ21はダイレクトにLFモータ26と接続されているために、この停止期間がないので、用紙搬送速度に矛盾が生じてしまう。被記録用紙の弛みが有れば、ステップS21の最中にその弛みを取っていく分で用紙搬送速度の矛盾を吸収できるが、弛みが無かった場合は、用紙搬送速度の矛盾を吸収できずに、無理やり紙送りローラ21側が被記録用紙を搬送しようとするが、被記録用紙4の後方は両面ローラA108に挟持されているために、実際には搬送されない事態が発生することがある。これにより、被記録用紙4の裏面先端の搬送量が狂ってしまい、想定よりも短い裏面上端余白となってしまうことがある。以上の状況を解決するために、通紙ガイド70を下降位置とすることで、ピンチローラホルダ23との高さ方向隙間を充分に取り、ループ生成スペースを確保している。これにより、剛性の比較的高い厚い被記録用紙を使用した場合にも、良好なレジストレーション動作が可能となる。
Since the
次に、ステップS23で、被記録用紙4の裏面の記録を行う。この時は、大抵の被記録用紙4の裏面後端部は、まだ両面ローラA108に挟持されている。そのままで両面ローラA108の回転を停止してしまうと、被記録用紙を後方に引っ張る負荷となってしまうため、用紙搬送精度が悪化するおそれがあり、好ましくない。よって、少なくとも被記録用紙4の裏面後端部が両面ローラA108に挟持されている間は、両面ローラA108の駆動は継続するように構成されている。この時の両面ローラ類駆動機構の状態は、図16の(d)に示すような状態である。
Next, in step S23, the back side of the
図16の(d)は、被記録用紙の反転動作後、LFモータ26が正方向に回転している最中の自動両面ユニット2のローラ類駆動機構の動作状態を示す模式的側断面図である。すなわち、図16の(c)の状態からLFモータ26が正方向回転に転じると、両面振り子アーム117は図15中の矢印a方向に揺動する。この時、ストップアーム127は、図15中の矢印h方向に揺動しており、両面振り子アーム117が図15中の矢印a方向に揺動してきても、両面振り子アームばね132がストップアーム127に当接することがないので、両面遊星ギアA118が両面ローラアイドラギア124に契合し、駆動力が伝達される。
FIG. 16D is a schematic side sectional view showing the operating state of the rollers driving mechanism of the
その後、LFモータ26の正方向回転が継続すると、フォロワーピン127aがスパイラル溝ギア120に導かれて内周に向けて移動し、ストップアーム127が図15中の矢印g方向に揺動する。揺動していく途中で、ストップアーム127は両面振り子アームばね132に当接し、両面振り子アームばね132を変形させていく。この両面振り子アームばね132の変形による反力で、両面振り子アーム117には図15中の矢印b方向へ揺動させる力が働くが、両面遊星ギアA118と両面ローラアイドラギア124の間で駆動伝達中には、ギア歯面同士が噛み合う力の方が強いために、両面遊星ギアA118と両面ローラアイドラギア124の契合は外れることがなく、駆動は継続される。図16の(d)はこの状態を示している。
Thereafter, when the
また、前述のごとく、回転、停止を伴う間欠駆動を行った場合でも、ギアの歯面同士が重なっているために、両面遊星ギアA118と両面ローラアイドラギア124の契合が外れることはない。更に、被記録用紙4の裏面の記録動作を継続し、LFモータ26を正方向に回転させていくと、フォロワーピン127aはスパイラル溝ギア120の最内周部に到達する。この時の両面ローラ類駆動機構の状態は図16の(e)に示すよ状態である。この時は、両面振り子アームばね132は最大変位した状態になるが、それでもギア歯面同士が噛み合う力が、両面振り子アーム117を揺動させる力よりも大きくなるように、両面振り子アームばね132の荷重が設定されているので、LFモータ26を正方向に回転させ続ける限りギア同士の契合は外れない。以上で被記録用紙4の裏面への記録動作が終了すると、ステップS24へ進む。
Further, as described above, even when intermittent driving with rotation and stop is performed, the engagement between the double-sided planetary gear A118 and the double-sided roller
次に、ステップS24で、被記録用紙4を不図示の排紙トレイ上に排出する排紙動作を実施する。排紙動作は、LFモータ26の正方向回転を継続することにより、第2排紙ローラ31によって被記録用紙4を記録ユニット本体1の外へ搬送することで実施する。次に、ステップS25で、裏面先端絶対位置のチェックを実施する。これは、短い被記録用紙を用いた場合、フォロワーピン127aがスパイラル溝ギア120の最内周まで到達しないことがあるからである。その場合にも、所定長分だけLFモータ26を回転させることにより、被記録用紙4の裏面記録動作が終了した時には、フォロワーピン127aが必ずスパイラル溝ギア120の最内周まで来るようにしている。
Next, in step S24, a paper discharge operation for discharging the
次に、ステップS26で、両面ローラ類駆動機構の初期化を実施する。前述のように、両面振り子アームばね132がチャージしている力を両面遊星ギアA118と両面ローラアイドラギア124の契合により保持しているので、LFモータ26を微少量だけ逆方向に回転させるだけで契合が外れる。すなわち、LFモータ26を逆方向に回転させると、両面振り子アーム117が図15中の矢印b方向に揺動しようとするため、両面遊星ギアA118と両面ローラアイドラギア124の契合が外れ、チャージしていた両面振り子アームばね132が元に戻る力で一気に図15中の矢印b方向に揺動する。この時の両面ローラ類駆動機構の状態は、図16の(f)に示す状態である。
Next, in step S26, the double-sided roller driving mechanism is initialized. As described above, the force charged by the double-sided
この状態では、両面振り子アームばね132の姿勢は元に戻っているので、ここからLFモータ26が正方向に回転した場合、両面振り子アーム117は図15中の矢印a方向に揺動しようとするが、フォロワーピン127aがスパイラル溝ギア120の最内周近傍に入っているため、両面振り子アームばね132がストップアーム127に当接してしまい、両面遊星ギアA118は両面ローラアイドラギア124に契合できない。更にLFモータ26を正方向に回転させても、フォロワーピン127aはスパイラル溝ギア120の最内周を回転し続けるので、両面ローラA108及び両面ローラB109が駆動されることはない。なお、前述のごとく、反転ディレイギアA121は、ステップS19あるいはステップS21で初期化されているので、このステップS26をもって両面ローラ類駆動機構の全ての初期化が終了する。以上で、自動両面記録動作が終了する。連続で自動両面記録動作を実施する場合は、同じシーケンスを繰り返せば良い。
In this state, since the posture of the double-sided
なお、以上の第1の実施形態では、両面振り子アームばね132の作用で、両面振り子アーム117とストップアーム127の間に弾性的な当接関係を実現しているが、本発明の趣旨はこれに拘束されず、以下の実施形態のように構成することも可能である。図17は、図16と同様に自動両面ユニット2のローラ類駆動機構の動作状態を示す模式的側断面図である。図17の両面振り子アーム117は、弾性の少ない腕を持っており、その腕とストップアーム127が当接できる関係にある。以下に、この他の実施形態に係る構成での動作を簡単に説明する。
In the first embodiment described above, the double-sided
図17の(a)から図17の(c)までの動作は、図16の(a)から図16の(c)の動作と同様であるので、ここではその説明を省略する。図17の(d)は、ストップアーム127がスパイラル溝ギア120の内周方向に移動してきて、両面振り子アーム117の腕と当接した状態を示す。両面振り子アーム117の腕には余り弾性がないので、ストップアーム127に押されると、両面振り子アーム117を図15中の矢印b方向に回転させる力が働く。その力は、両面遊星ギアA118と両面ローラアイドラギア124の契合を外そうとする方向に働く。
The operations from (a) to (c) of FIG. 17 are the same as the operations from (a) to (c) of FIG. FIG. 17D shows a state where the
契合を外そうとする力は、両面遊星ギアA118と両面ローラアイドラギア124の歯面間に働く圧力並びにギアの歯面の弾性及び滑り力と釣り合うが、やがてフォロワーピン127aが内周に動くに従い契合を外そうとする力が大きくなり、歯面間の力に打ち勝って、強制的に両面遊星ギアA118と両面ローラアイドラギア124の契合を解除する。契合が解除されると同時に、両面ローラA108及び両面ローラB109の回動は停止する。図17の(e)は、この状態を示している。なお、このローラの回動を停止させるタイミングは、ステップS23の中で、被記録用紙4の裏面後端が両面ローラA108を通過した後の適当な時期に行われる。
The force to release the engagement balances with the pressure acting between the tooth surfaces of the double-sided planetary gear A118 and the double-sided roller
ギアの契合解除以降では、LFモータ26が正方向に回転しても、ストップアーム127によって両面振り子アーム117が図15中の矢印a方向に揺動するのを妨げられるので、次に所定量LFモータ26が逆方向に回転するまで、自動両面ユニット2は駆動されない。また、第1の実施形態と同様に、反転ディレイギアA121もステップS19あるいはステップS21においてなされているので、この時点で自動両面ユニット2のローラ類駆動機構の初期化は完了している。これにより、裏面の記録動作中に両面ローラA108及び両面ローラB109を回転させる負荷を無くすことができ、LFモータ26の回転負荷を低減させることが可能となる。以上が、自動両面ユニット2のローラ類駆動機構の他の実施形態である。
After the release of the gear engagement, even if the
なお、本発明の趣旨はこれに拘束されず、リフト機構のポジションを変更した制御とすることも可能である。すなわち、上記は通常の待機状態で通紙ガイド70がアップ状態であったが、これをダウン状態にすることも可能である。具体的には、通常リフト機構を第3ポジションとし、ステップS1の前にリフト機構を第3ポジションから第1ポジションに移動させる制御を追加する構成とする。また、ステップS26の後に、リフト機構を第1ポジションから第3ポジションに移動させる制御を追加する構成としても良い。このように構成した場合には、待機状態でピンチローラ22がリリース状態となっているので、厚紙等を排紙ローラ側から給紙する時などに好適である。以上が、動作シーケンスを示すフローチャートに沿った自動両面記録動作の説明である。
Note that the gist of the present invention is not limited to this, and control in which the position of the lift mechanism is changed is also possible. That is, in the above, the
なお、以上の実施形態では、記録手段としての記録ヘッドを主走査方向に移動させながら記録するシリアル型の記録装置を例に挙げて説明したが、本発明は、被記録材の全幅または一部をカバーする長さのラインタイプの記録手段を用いて副走査(紙送り)のみで記録するライン方式の記録装置の場合にも、同様に適用することができ、同様の効果を達成し得るものである。また、本発明は、記録手段の数にも関わりなく自由に実施できるものであり、1個の記録手段を用いる記録装置の他、異なる色のインクを使用する複数の記録手段を用いるカラー記録用の記録装置、あるいは同一色彩で異なる濃度のインクを使用する複数の記録手段を用いる階調記録用の記録装置、さらには、これらを組み合わせた記録装置の場合にも、同様に適用することができ、同様の効果を達成し得るものである。 In the above-described embodiment, the serial type recording apparatus that records while moving the recording head as the recording unit in the main scanning direction has been described as an example. In the case of a line-type recording apparatus that records only by sub-scanning (paper feed) using a line-type recording means of a length that covers the same, it can be similarly applied and can achieve the same effect It is. Further, the present invention can be freely implemented regardless of the number of recording means, and for color recording using a plurality of recording means using different color inks in addition to a recording apparatus using one recording means. The present invention can be similarly applied to a recording apparatus for gradation recording using a plurality of recording means that use inks of the same color and different densities, and a recording apparatus that combines these recording apparatuses. The same effect can be achieved.
さらにまた、本発明は、記録装置がインクジェット記録装置である場合、記録ヘッドとインクタンクを一体化した交換可能なヘッドカートリッジを用いる構成、記録ヘッドとインクタンクを別体にし、その間をインク供給用のチューブ等で接続する構成など、記録ヘッドとインクタンクの配置構成がどのような場合にも同様に適用することができ、同様の効果が得られるものである。なお、本発明は、記録装置がインクジェット記録装置の場合、熱エネルギーを利用してインクを吐出する方式のインクジェット記録ヘッドを使用する記録装置の他、例えば、ピエゾ素子等の電気機械変換体等を用いしインクを吐出する方式のインクジェット記録ヘッドを使用する記録装置など、他のインク吐出方式を用いるインクジェット記録装置に対しても同様に提供することができ、同様の作用、効果を達成できるものである。 Furthermore, in the present invention, when the recording apparatus is an inkjet recording apparatus, a configuration using a replaceable head cartridge in which the recording head and the ink tank are integrated, the recording head and the ink tank are separated, and an ink supply between them is provided. The present invention can be similarly applied to any arrangement of the recording head and the ink tank, such as a connection using a tube, and the same effect can be obtained. In the present invention, when the recording apparatus is an ink jet recording apparatus, in addition to the recording apparatus using an ink jet recording head that discharges ink using thermal energy, for example, an electromechanical transducer such as a piezo element, etc. It can be similarly provided to an ink jet recording apparatus using another ink discharge method, such as a recording device using an ink jet recording head of a method used to discharge ink, and can achieve the same operation and effect. is there.
1 記録ユニット本体(装置本体)
2 自動両面ユニット(自動反転部、用紙反転部)
4 被記録媒体(被記録用紙)
10 シャーシ
11 記録手段(記録ヘッド)
12 インクタンク
13 キャリッジ
14 ガイドシャフト
14a 右ガイドシャフトカム
14b 左ガイドシャフトカム
14c 右ガイドシャフトカムギア
15 ガイドレール
16 キャリッジベルト
17 キャリッジモータ
20 アイドラプーリ
21 紙送りローラ
22 ピンチローラ
23 ピンチローラホルダ
24 ピンチローラばね
26 LFモータ
29 プラテン
30 第1排紙ローラ
31 第2排紙ローラ
32 第1拍車列(回転体)
33 第2拍車列(回転体)
34 拍車ベース
36 メインテナンスユニット(吐出回復装置)
37 メインASF(自動給紙部)
38 ASFベース
39 給紙ローラ
40 分離ローラ
41 圧板
44 ASFフラップ
46 ASFモータ
47 ASF振り子アーム
48 ASF太陽ギア
49 ASF遊星ギア
55 ガイドシャフトばね
56 ガイド斜面
57 ガイド長孔
58 リフトカム軸
59 ピンチローラホルダ押圧カム
60 ピンチローラばね押圧カム
61 PEセンサレバー押圧カム
65 通紙ガイド押圧カム
66 PEセンサレバー(用紙検知レバー)
67 PEセンサ
68 PEセンサレバーばね
70 通紙ガイド(ガイド部材)
71 通紙ガイドばね
74 ガイドシャフトばね
102 内ガイド
103 リアカバー
104 切替フラップ(可動フラップ)
105 切替フラップばね
106 出口フラップ
107 出口フラップばね
108 両面ローラA
109 両面ローラB
112 両面ピンチローラA
113 両面ピンチローラB
116 両面太陽ギア
117 両面振り子アーム
118 両面遊星ギアA
119 両面遊星ギアB
120 スパイラル溝ギア
127 ストッパアーム
128 ストッパアームばね
131 退避パス
301 制御基板
305 ASFセンサ
307 ヘッドドライバ
308 ホスト装置
310 CPU
311 ROM
312 RAM
1. Recording unit main unit (device main unit)
2 Automatic duplex unit (automatic reversing unit, paper reversing unit)
4 Recording medium (recording paper)
10
12
33 Second spur train (rotating body)
34
37 Main ASF (automatic paper feeder)
38
67
71
105
109 Double-sided roller B
112 Double-sided pinch roller A
113 Double-sided pinch roller B
116 Double-
119 Double-sided planetary gear B
120
311 ROM
312 RAM
Claims (5)
被記録媒体を記録部に搬送する搬送ローラと、
前記搬送ローラと協働して被記録媒体を挟持するピンチローラと、
前記記録部の下流側で被記録媒体を搬送する排紙ローラと、
前記搬送ローラによって前記記録部とは反対の方向に搬送された被記録媒体の表裏を反転して前記搬送ローラに搬送する反転部と、
前記給送手段から給送される被記録媒体を前記搬送ローラに向けて案内する第1搬送路と、
前記第1搬送路の下方に配置され、前記反転部から搬送されてくる被記録媒体を前記搬送ローラに向けて案内する第2搬送路と、を備え、
前記給送手段または前記反転部から搬送される被記録媒体の先端を前記搬送ローラと前記ピンチローラのニップに突き当てることにより斜行補正する両面記録装置であって、
前記給送手段から前記第1搬送路に案内されて搬送される被記録媒体、または前記反転部から前記第2搬送路によって案内されて搬送される被記録媒体を前記ニップに該ニップよりも高い位置から案内する第1のポジションと、前記搬送ローラによって搬送される被記録媒体を前記第2搬送路に案内する前記第1ポジションよりも低い第2のポジションとに移動可能なガイド部材と、を有し、
前記記録部により被記録媒体の表面に記録を行った後、前記搬送ローラと前記ピンチローラとが離間した状態で前記被記録媒体の後端が前記搬送ローラと前記ピンチローラとの間を通過するように前記排紙ローラによって前記被記録媒体を前記反対方向に搬送し、その後前記搬送ローラと前記ピンチローラとで前記被記録媒体を挟持して前記反転部に向けて搬送することを特徴とする両面記録装置。 A feeding means for feeding a recording medium;
A conveyance roller for conveying a recording medium to a recording unit;
A pinch roller for clamping the recording medium in cooperation with the conveying roller;
A paper discharge roller for conveying a recording medium downstream of the recording unit;
A reversing unit for reversing the front and back of the recording medium conveyed in the direction opposite to the recording unit by the conveying roller and conveying the recording medium to the conveying roller;
A first conveyance path for guiding the recording medium fed from the feeding means toward the conveyance roller;
A second conveyance path that is disposed below the first conveyance path and guides the recording medium conveyed from the reversing unit toward the conveyance roller ;
A double-sided recording apparatus that corrects skew by abutting a leading end of a recording medium conveyed from the feeding unit or the reversing unit against a nip between the conveying roller and the pinch roller;
A recording medium that is guided and conveyed from the feeding unit to the first conveying path or a recording medium that is guided and conveyed by the second conveying path from the reversing unit is higher in the nip than the nip. A first member that guides from a position, and a guide member that can move to a second position that is lower than the first position that guides the recording medium transported by the transport roller to the second transport path. Have
After recording on the surface of the recording medium by the recording unit, the trailing edge of the recording medium passes between the conveying roller and the pinch roller in a state where the conveying roller and the pinch roller are separated from each other. As described above, the recording medium is conveyed in the opposite direction by the paper discharge roller, and thereafter, the recording medium is sandwiched between the conveyance roller and the pinch roller and conveyed toward the reversing unit. Double-sided recording device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004121651A JP4328661B2 (en) | 2003-04-18 | 2004-04-16 | Double-sided recording device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003113644 | 2003-04-18 | ||
| JP2004121651A JP4328661B2 (en) | 2003-04-18 | 2004-04-16 | Double-sided recording device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004331399A JP2004331399A (en) | 2004-11-25 |
| JP2004331399A5 JP2004331399A5 (en) | 2007-06-07 |
| JP4328661B2 true JP4328661B2 (en) | 2009-09-09 |
Family
ID=33513279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004121651A Expired - Fee Related JP4328661B2 (en) | 2003-04-18 | 2004-04-16 | Double-sided recording device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4328661B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6060676B2 (en) * | 2012-12-26 | 2017-01-18 | コニカミノルタ株式会社 | Paper processing apparatus and image forming system |
| JP6083518B2 (en) * | 2013-03-29 | 2017-02-22 | セイコーエプソン株式会社 | Recording device |
-
2004
- 2004-04-16 JP JP2004121651A patent/JP4328661B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004331399A (en) | 2004-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4208673B2 (en) | Recording device | |
| KR100561573B1 (en) | Both-side recording apparatus | |
| JP4719409B2 (en) | Recording method | |
| JP4086730B2 (en) | Double-sided recording device | |
| JP4086706B2 (en) | Recording device | |
| JP4934488B2 (en) | Recording device | |
| JP4183244B2 (en) | Recording device | |
| JP4164422B2 (en) | Inkjet recording device | |
| JP2007062965A (en) | Paper feeding device and image recording device with it | |
| JP4914475B2 (en) | Inkjet recording device | |
| US20080158622A1 (en) | Image reading and recording apparatus | |
| US20080158288A1 (en) | Recording apparatus | |
| JP2006273449A (en) | Medium inverting device, and recording device provided with the same | |
| JP4328661B2 (en) | Double-sided recording device | |
| JP2006193303A (en) | Ink jet recording device | |
| JP2004331400A (en) | Double side recording device | |
| JP4264611B2 (en) | Printer head cleaning method and printer head | |
| JP2005212906A (en) | Recording device | |
| JP2005075526A (en) | Medium reversing device and recording apparatus | |
| JP2007119188A (en) | Recording device | |
| JP2006315778A (en) | Recording device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060629 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070412 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070412 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090310 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090609 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090615 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120619 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120619 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130619 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |