JP4260369B2 - 自動制御マイクロチャネル生体分析機器 - Google Patents
自動制御マイクロチャネル生体分析機器 Download PDFInfo
- Publication number
- JP4260369B2 JP4260369B2 JP2000558383A JP2000558383A JP4260369B2 JP 4260369 B2 JP4260369 B2 JP 4260369B2 JP 2000558383 A JP2000558383 A JP 2000558383A JP 2000558383 A JP2000558383 A JP 2000558383A JP 4260369 B2 JP4260369 B2 JP 4260369B2
- Authority
- JP
- Japan
- Prior art keywords
- sample
- microchip
- microchannel
- substrate
- track
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000926 separation method Methods 0.000 claims description 57
- 239000000758 substrate Substances 0.000 claims description 43
- 238000000034 method Methods 0.000 claims description 26
- 238000004458 analytical method Methods 0.000 claims description 23
- 238000011068 loading method Methods 0.000 claims description 23
- 230000003287 optical effect Effects 0.000 claims description 10
- 238000001514 detection method Methods 0.000 claims description 6
- 238000005259 measurement Methods 0.000 claims description 4
- 230000008569 process Effects 0.000 claims description 4
- 239000000126 substance Substances 0.000 claims description 3
- GNFTZDOKVXKIBK-UHFFFAOYSA-N 3-(2-methoxyethoxy)benzohydrazide Chemical compound COCCOC1=CC=CC(C(=O)NN)=C1 GNFTZDOKVXKIBK-UHFFFAOYSA-N 0.000 claims 3
- 238000006467 substitution reaction Methods 0.000 claims 3
- 239000000523 sample Substances 0.000 description 114
- 238000002347 injection Methods 0.000 description 24
- 239000007924 injection Substances 0.000 description 24
- 238000003860 storage Methods 0.000 description 16
- 239000002699 waste material Substances 0.000 description 14
- 238000004140 cleaning Methods 0.000 description 11
- 238000001962 electrophoresis Methods 0.000 description 11
- 239000012634 fragment Substances 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 108020004414 DNA Proteins 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- 239000004065 semiconductor Substances 0.000 description 6
- 238000001712 DNA sequencing Methods 0.000 description 5
- 239000003086 colorant Substances 0.000 description 5
- 238000013480 data collection Methods 0.000 description 5
- 239000012530 fluid Substances 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000009940 knitting Methods 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 4
- 239000000243 solution Substances 0.000 description 4
- 238000001917 fluorescence detection Methods 0.000 description 3
- 238000003205 genotyping method Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- ZHNUHDYFZUAESO-UHFFFAOYSA-N Formamide Chemical compound NC=O ZHNUHDYFZUAESO-UHFFFAOYSA-N 0.000 description 2
- 229920000663 Hydroxyethyl cellulose Polymers 0.000 description 2
- 239000004354 Hydroxyethyl cellulose Substances 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000005251 capillar electrophoresis Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 238000012252 genetic analysis Methods 0.000 description 2
- 235000019447 hydroxyethyl cellulose Nutrition 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 230000000873 masking effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 2
- 239000002773 nucleotide Substances 0.000 description 2
- 125000003729 nucleotide group Chemical group 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 108091028043 Nucleic acid sequence Proteins 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- XSQUKJJJFZCRTK-UHFFFAOYSA-N Urea Chemical compound NC(N)=O XSQUKJJJFZCRTK-UHFFFAOYSA-N 0.000 description 1
- 241000700605 Viruses Species 0.000 description 1
- 239000002250 absorbent Substances 0.000 description 1
- 230000002745 absorbent Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000004202 carbamide Substances 0.000 description 1
- 239000003153 chemical reaction reagent Substances 0.000 description 1
- 238000013098 chemical test method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011209 electrochromatography Methods 0.000 description 1
- 238000004049 embossing Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000011049 filling Methods 0.000 description 1
- 238000000799 fluorescence microscopy Methods 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 238000004817 gas chromatography Methods 0.000 description 1
- 239000000499 gel Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 238000001155 isoelectric focusing Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 238000004811 liquid chromatography Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000002493 microarray Methods 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 239000002991 molded plastic Substances 0.000 description 1
- 238000009832 plasma treatment Methods 0.000 description 1
- 108091033319 polynucleotide Proteins 0.000 description 1
- 239000002157 polynucleotide Substances 0.000 description 1
- 102000040430 polynucleotide Human genes 0.000 description 1
- 238000001556 precipitation Methods 0.000 description 1
- 108090000623 proteins and genes Proteins 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 238000012163 sequencing technique Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 150000003384 small molecules Chemical class 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 239000013076 target substance Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/26—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating electrochemical variables; by using electrolysis or electrophoresis
- G01N27/416—Systems
- G01N27/447—Systems using electrophoresis
- G01N27/44704—Details; Accessories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L13/00—Cleaning or rinsing apparatus
- B01L13/02—Cleaning or rinsing apparatus for receptacle or instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/26—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating electrochemical variables; by using electrolysis or electrophoresis
- G01N27/416—Systems
- G01N27/447—Systems using electrophoresis
- G01N27/44704—Details; Accessories
- G01N27/44743—Introducing samples
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/26—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating electrochemical variables; by using electrolysis or electrophoresis
- G01N27/416—Systems
- G01N27/447—Systems using electrophoresis
- G01N27/44756—Apparatus specially adapted therefor
- G01N27/44782—Apparatus specially adapted therefor of a plurality of samples
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/26—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating electrochemical variables; by using electrolysis or electrophoresis
- G01N27/416—Systems
- G01N27/447—Systems using electrophoresis
- G01N27/44756—Apparatus specially adapted therefor
- G01N27/44791—Microapparatus
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/50—Containers for the purpose of retaining a material to be analysed, e.g. test tubes
- B01L3/502—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures
- B01L3/5027—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures by integrated microfluidic structures, i.e. dimensions of channels and chambers are such that surface tension forces are important, e.g. lab-on-a-chip
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N2035/00039—Transport arrangements specific to flat sample substrates, e.g. pusher blade
- G01N2035/00059—Transport arrangements specific to flat sample substrates, e.g. pusher blade vacuum chucks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N2035/00099—Characterised by type of test elements
- G01N2035/00158—Elements containing microarrays, i.e. "biochip"
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0437—Cleaning cuvettes or reaction vessels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1065—Multiple transfer devices
- G01N35/1074—Multiple transfer devices arranged in a two-dimensional array
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T436/00—Chemistry: analytical and immunological testing
- Y10T436/11—Automated chemical analysis
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T436/00—Chemistry: analytical and immunological testing
- Y10T436/11—Automated chemical analysis
- Y10T436/110833—Utilizing a moving indicator strip or tape
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T436/00—Chemistry: analytical and immunological testing
- Y10T436/25—Chemistry: analytical and immunological testing including sample preparation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T436/00—Chemistry: analytical and immunological testing
- Y10T436/25—Chemistry: analytical and immunological testing including sample preparation
- Y10T436/2575—Volumetric liquid transfer
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Molecular Biology (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Biochemistry (AREA)
- Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- Electrochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Dispersion Chemistry (AREA)
- Clinical Laboratory Science (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
Description
技術分野
本発明は、分子分離技術に関し、より詳細には、マイクロチャネル中で複数の試料を分析するための自動制御機器に関する。
【0002】
背景技術
過去10年間ほどにおいては、電気泳動によるごとき、平行キャピラリーが分子分離用に広く用いられている。キャピラリー電気泳動はDNAおよびタンパク質を分析するために、ならびに、小イオン、小分子、細菌およびウイルスを分離するために用いられている。溶液、ゲルおよびポリマーを包含する異なる分離媒体がキャピラリーにおいて用いられている。各技術において、標的の移動度を測定し得る。
【0003】
キャピラリーは、DNA断片長分析およびDNAシークエンシングの双方に適用されている。ヌクレオチド配列の実験は、ポリヌクレオチド断片の高分解能の分離に依存している。断片のファミリー中の各断片を、蛍光マーカーで標識し、キャピラリーチャネル中のモレキュラー・マイグレーションにおける差を観察する。単一塩基対にのみ相違を有する断片は、蛍光検出で日常的に分離される。
【0004】
処理量を増加するために、多数のキャピラリーを平行で使用し得る。平行チャネル電気泳動により、多数の試料を同時に分析し、高処理速度を得ることができる。
最近、幾つかのグループがマイクロチャネル形式のキャピラリー電気泳動を完成している(A. T. Wooley, G. F. SensabaughおよびR. A. Mathies, "High-Speed DNA Genotyping Using Microfabricated Capillary Array Electrophoresis Chips", Anal. Chem., 69:2181-2186 (1997); A. T. WoolleyおよびR. A. Mathies, Anal. Chem., 67: 3676-3680 (1995); A. T. Woolley, P. C. Simpson, S. Liu, R. Johnston, G. F. Sensabaugh, A. N. GlazerおよびR. A. Mathies, "Advances in Microfabricated Integrated DNA Analysis Systems", HPCE98 (1998); P. C. Simpson, D. Roach, A. T. Woolley, T. Thorsen, R. Johnston, G. F. SensabaughおよびR. A. Mathies, "High-throughput genetic analysis using microfabricated 96-sample capillary array electrophoresis microplates", Proc. Natl. Acad. Sci. USA, 95: 2256-2261 (1998))。このアプローチは、分離チャネルとして、キャピラリーの代わりに基板にエッチングまたは成形したマイクロチャネルを用いている(R. M. McCormick, R. Nelson, M. G. Alonso-Amigo, D. J. BenvegnuおよびH. H. Hooper, "Microchannel electrophoretic separation of DNA in injection-molded plastic substrates", Anal. Chem. 69: 2626-2630 (1997); 1994年にB. Ekstrom, G. Jacobson, O. OhmanおよびH. Sjodinに対して発行された米国特許第5,376,252号)。基板全体の物理的サイズはマイクロチップ・サイズ、すなわち一辺が数ミリメートルの寸法、からウエハー・サイズ、すなわち半導体ウエハー(直径10-20cm)から48cm長のマイクロチャネル“マクロチップ”と同様の寸法まで変化し得るが(C. Davidson, J. Balch, L. Brewer, J. Kimbrough, S. Swierkowski, D. Nelson, R. Madabhushi, R. Pastrone, A. Lee, P. McCready, A. Adamson, R. Bruce, R. MariellaおよびA. Carrano, "Development of a Microchannel Based DNA Sequencer", DOE Human Genome Program Contractor-Grantee Workshop VI, Santa Fe, NM (1997))、得られたデバイスはマイクロチップと一般的に呼ばれている。マイクロチップのサイズの決定因子は、マイクロチャネル経路の複雑さおよび分離チャネルの長さである。チャネルの長さは試料注入、試料移動および測定ゾーンを許容しなければならない。チャネルは、典型的には、8ないし40μmの深さおよび30ないし150μmの幅の寸法のものである。小さなチャネルは、より大きな断面積を有するキャピラリーよりも顕著に短時間でDNA断片を分離する。
【0005】
平行試料ウェルを供し、自動化光学ディテクターおよびソフトウェア・アナライザーを供することによって、平行キャピラリーを供することを超えて、分析の速度における幾つかの進歩が達成されている。これらの進歩にもかかわらず、特に標本を取扱い、分析機器に提示することにおける精巧な分離はなお時間がかかり、かつ労働集約的なプロセスである。
【0006】
本発明の目的は、マイクロチャネルにおける平行高処理分析のために、マイクロチップおよびマクロチップで標本を自動制御的(robotically)に取扱いおよびそこに提示するための装置を考案することにある。さらなる目的は、電極が設けられ、試料を分離チャネルに注入し、分離を行い、かつ試料を検出する分析ステーションへのチップの提示を自動化することにある。
【0007】
発明の概要
上記目的は、マイクロチップ上のマイクロチャネル中の電気泳動に基づく機器中で試料を負荷し、取扱い、流動させ(running)および分析するためのマクロないしマイクロ・インターフェースで達成された。該マイクロチップは、マイクロチャネルに通じるマクロスケールの流入口を有する。該流入口は、編成されたピペッターチップのアレイのピペッターのサイズおよび間隔に適合するように離されている。
【0008】
マイクロチャネルは、マイクロリットルよりも遥かに小さい微視的体積を供し、その中で分析が行われる。当該機器は、ピペッター、電極およびディテクターに関するマイクロチップの相対的な運動を有する、マイクロチップ取扱機を特徴とする。マイクロチップを運動させる場合もあるが、他のコンポーネントを運動させる場合もある。試料を含まないマイクロチップをチャック上に置き、ピペット操作デバイスで試料をマイクロチップに負荷し、マイクロチップ中のマイクロチャネルを電極と接触させ、試料を分離マイクロチャネルに注入し、電気泳動分離を行い、分離を検出および測定し、ついでマイクロチップを除去することを含む一連の自動操作が存在する。
【0009】
好ましい具体例において、分離マトリクスを予め充填しているが試料は充填していないマイクロチップは、試料負荷ステーションから試料分析ステーションに第1のY−軸トラック上で非常に正確に運動可能である真空チャックに保持される。マイクロチップのマイクロチャネルは、試料分離を高めるためのシーブとして作用し得るポリマーまたは他のマトリクスで予め充填する。試料負荷ステーションでは、ピペッターを含む多機能デバイスによって、試料をマイクロチップに負荷し得る。該多機能デバイスは、第1のY−軸トラック上の試料負荷ステーションと、第1のY−軸トラックに平行な第2のY−軸トラック上のチップおよび試料ステーションの双方との間を横行X−軸ガントリに沿って運動する。第2のトラックはピペットチップ、試薬トレイ、試料を含むマイクロタイター・トレイまたは他の物体を、多機能デバイスによる使用のための位置に自動的に運動させることができる。ガントリによって運搬される多機能デバイスは、XおよびY軸と垂直をなすZ−軸上を昇降する。すべての軸に沿った運動は、正確かつ厳密な位置決定を達成し得るように、ステッピング・モーターによって運転される。正確な位置制御には、サーボモーターまたは他のアクチュエーター系を用い得る。
【0010】
多機能デバイスは、複数の編成ピペッター、個別ピペッターおよび真空ラインを含む。複数のピペッターは、マイクロタイター・プレート上のウェルの間隔に適合する間隔で編成されている。同じ間隔が、マイクロチップ上の試料負荷流入口に用いられる。この様にして、多チャネルピペッターは、複数の試料を試料流入口に同時に負荷し得る。
【0011】
最初に、多機能デバイスは、第1トラック上の試料負荷ステーションから第2トラック上のチップおよび試料ステーションに運動し得、そこで新たなピペットチップが編成ピペッターに適用される。ついで、多機能デバイスは、ガントリ上を運動してチップガイドを拾い上げ(pick up)、ついで第2トラック上のチップおよび試料ステーションに戻る。ついで、第2トラックは、ガントリ上の編成ピペッターがトラック上のマイクロタイター・プレートから試料を回収(withdraw)し得る位置まで運動し得る。ついで、多機能デバイスは、ガントリ上を試料負荷ステーションまで運動し、そこで、第1トラック上のマイクロチップ中の試料流入口に試料を投入する。多機能デバイスは、ガントリに沿って戻って、まずチップガイドを放出し、ついでチップおよび試料ステーションに戻り、そこで、第2トラックによって多機能デバイスの下方の位置に運動された使用済みチップトレイに使用済みチップを廃棄する。チップ、チップガイドおよび試料を拾い上げ;試料をマイクロチップに分配し;ついで、チップガイドを置き、使用済みチップを廃棄するサイクルは、マイクロチップが完全に負荷されるまで繰返す。
【0012】
マイクロチップが負荷された後に、それは、試料分析ディテクターの下方の第1トラック上の試料分析ステーションに運動し、上昇して、第1トラック上のプラットフォームによって支持されたワイヤ電極のアレイと合体する。マイクロチップの最終位置は、マイクロチャネルを試料分析ステーションのディテクターの焦平面に設置する。該ディテクターは、好ましくは、分離の間に蛍光標識分子を検出することができる走査型共焦点レーザー顕微鏡を含む。
【0013】
電極の電位を制御して、まず正確なサブ−マイクロリットル体積の試料を負荷ウェルから分離マイクロチャネルの注入領域に運動させ、ついで分離マイクロチャネルにおけるエレクトロ・マイグレーションを刺激し得る。
試料はマイクロチャネル中で分離するため、マイクロチップの領域は、典型的には走査型共焦点レーザー顕微鏡によってモニターして分子の分離を検出する。DNAシークエンシングに関しては、分離の4色電気泳動図を形成するために4種の蛍光マーカーを通常検出する。4色電気泳動図をプロセシングして、塩基を最終的に求めて、試料のDNA配列を決定し得る。
【0014】
本発明を実施するためのベストモード
図1に参照して、マイクロチャネル化学分析用の自動制御機器は、平行トラック20および30を橋かけする(spanning)ガントリ33と、2の該平行トラックとを特徴として示される。トラック20および30ならびにガントリ33は、半導体装置分野でよく知られているParker Daedal社製の線形平行移動ステージである。Y−軸に沿って並んだ第1トラック20は、中ほどに親ネジ21を有する平行レール17および19を有する。ネジ21は、ローラーベアリングによってレール17および19上に載る第1フレーム13を所望の場所に位置し得るように、ステッピング・モーターによって運転される精密ネジである。ネジを運転するモーターは図示しない。ローラーベアリングは、第1フレーム13とレール17および19とを接触させている。ネジ21を回転させることにより、第1フレーム13は、多機能デバイス35の下方のごとき所望の場所に正確に位置し得る。
【0015】
フレームは、半導体ウエハーを確実に保持するための真空チャックとしても半導体産業で知られている、基板チャック11を運搬する。電極洗浄ステーション10に隣接する基板チャック11は、上にマイクロチャネルを有するディスク型マイクロチップ基板15を保持する。
本明細書中で用いるマイクロチップなる語は、マイクロチャネルを含む基板をいう。本発明のマイクロチップは、典型的に、集積回路マイクロチップよりも遥かに大きい。マイクロチップ15は、より大きいまたはより小さいデバイスや他の形状のものも用い得るが、約4インチの直径を有するガラスまたはシリコンウエハーのサイズで示される。本発明は、いずれかの特定のサイズまたは形状のマイクロチャネルを有する基板に限定されるものではない。さらに、マイクロチップ上のマイクロチャネルの構造もいずれか特定のデザインに限定されるものではなく、むしろ、二次元および三次元マイクロチャネルの双方を含むいずれの立体構造も包含する。
【0016】
本明細書中で用いるマイクロチャネルなる語は、ミリメーター未満の断面線寸法を有するいずれのチャネルをもいう。マイクロチャネルは、典型的に、30ないし150μmの範囲内の幅および5ないし50μmの範囲内の深さを有する。マイクロチャネルは、典型的に、エンボス、微小成形、沈澱および他の微細加工技術を含む他の技術も用い得るが、マイクロチップ製造技術、すなわちマスキングおよびエッチング、によりその中に形成される。
【0017】
これもY−軸に沿って並ぶ第2トラック30は、平行レール27および29を有する。これらのレールは、低摩擦回転関係で第2フレーム23を支持する。ネジ31が第2フレームを運転する。第2フレームはマイクロタイター・プレート25、ならびにホルダー14、16および18に着座し得る他のラックまたはプレートを運搬する。
ガントリ33は、Y−軸と垂直をなすX−軸に沿って並び、平行レール37および39を有し、多機能デバイス35を支持する第3フレームを運搬している第3トラックである。ステッピング・モーター(図示せず)によって回転されるネジ41は、第1トラック20と第2トラック30との間に第3フレーム38および多機能デバイス35を運動させる。多機能デバイスは、編成ピペッター、個別ピペッターおよび真空デバイスまたは他のデバイスを有するピペッター・アセンブリを運搬するロボットアームとして機能する。
【0018】
多機能デバイス35は、X軸およびY軸と垂直をなすZ−軸で運動し得る。モーター43は、Z−軸における昇降運動で多機能デバイス35を運動させる。この運動は、ピペットチップ42も上下に運動させる。さらに、エア・シリンダー(図示せず)を用いて、多機能デバイス35によって保持されるピペットチップ42を吸収様式でマイクロチップ、マイクロタイター・プレート25、またはピペットチップ・ラックに押し出す。運動可能なピペットチップは、それが試料負荷のためにマイクロチップと接触するところで何ら妨害されることなく、マイクロタイター・プレートに挿入して試料を回収するために降下し、ついで上昇し、第2トラックにガントリ上を運動することができる。
【0019】
図1に示していないものは、第1トラックの向い合う側の台座パッド45および47上に直立するプラットフォーム上に配置される走査型共焦点レーザー顕微鏡のごとき、ディテクターまたは測定機器である。ディテクターは第1フレーム13の上方のプラットフォームに設置し、これを用いて蛍光を誘導し、マイクロチップ上のマイクロチャネルからの蛍光光を収集する。
【0020】
図2に参照して、第1トラック20は、前記した台座パッド上に直立しているプラットフォーム50によって橋かけされている。プラットフォーム50は、電極ワイヤのアレイ、および走査型共焦点レーザー顕微鏡のごとき試料分析ディテクターを運搬する。第1フレーム13は、多機能デバイス35の位置まで前進し、そこで、第3フレーム38に結合した多機能デバイス35上に運搬されているピペッターのアレイが試料材料をマイクロチップ15内の流入口に分配する。ピペッターはZ−軸に沿って昇降することができ、降下した位置で試料をマイクロチップ中の穴部に分配する。昇降は、ピペッター・アセンブリをその標的位置に運ぶステッピング・モーター43で制御される。多機能デバイス上のエア・シリンダーは、意図するピペッターを動かし、それによって試料をマイクロチップに分配させる。
【0021】
ピペッター・アレイを運搬している多機能デバイス35は、マイクロタイター・プレート25および26ならびにラック34および36中の新しいピペッターチップが存在する第2トラック30付近まで運動可能である。使用済みチップは、チップ廃棄ラック42および44に廃棄し得る。多機能デバイス上のピペッター・アレイは、新たなチップをピペッターに取付け、使用済みチップをピペッターから放出するために第2エア・シリンダーを用いる。廃棄チップラックまで運動した後に、ピペッター・アセンブリのピペッター本体の背後のエア・シリンダーは結合して、個別ピペッターからチップを押して取り外す。チップを拾い上げるためには、ピペッター・アセンブリを新たなチップ・トレイ上方に運動させる。ついで、ステッピング・モーター43は、ピペットチップ付近に多機能デバイス35を降下させ、そこで、エア・シリンダーは、多機能デバイス35に関してピペッター・アセンブリを上昇させ、ついで突然降下させ、ピペッターにチップを押し出すことによって新たなチップ・トレイからのチップの拾い上げを確保するスプリング・アクションを供する。新しいチップは、摩擦結合によって適所に保持される。
【0022】
第2エア・シリンダーは、ピペッターを動かして、流体を拾い上げ、配送する。分配する材料よりもより多い材料が拾い上げられ、それによって、ウェル中に泡が形成される可能性が減じられる。泡は、マイクロチャネル中の適当な電流の流れを妨害するおそれがある。
チップガイド40は、第2トラック30と第1トラック20との間に位置する。チップガイド40は、ピペッターチップが入れる円錐形穴部のアレイを有するブロックである。チップガイドは、真空によって多機能デバイス上に保持されている。チップガイドは、マイクロチップ中の穴部と正確に並べるために、ピペッター上にチップを位置決定する。チップガイドの使用は任意であって、マイクロチップのデザインに依存する。
【0023】
図3に参照して、第1トラック20は、基板チャック11および該チャック上のマイクロチップ15を運搬している第1フレーム13と共に第1支持テーブル24上にマウントされるように示し得る。多機能デバイス35は、ピペッターチップが基板中の穴部に入り得るように、昇降するようマウントされる。ガントリ33は、第1トラック20、チップガイド40および第2トラック30に関する多機能デバイス35の位置決定を許容する。第2支持テーブル32は、マイクロタイター・プレート25および26ならびにピペットラック34および36を支えている第2フレーム23を運搬する第2トラック30を保持している。多機能デバイス35は、横方向に運動し、マイクロタイター・プレート25および26と連絡し得る。光学および機械式位置センサーは、多機能デバイスのピペッター・アセンブリに関して第1および第2トラック上のフレームを配置する。多機能デバイス用のコントローラーは、第1フレーム上の基板チャックの、ならびに試料を受け正確な場所に配送するために第2フレーム上のマイクロタイター・プレートの正確な位置を確かめなければならない。
【0024】
多機能デバイス35は、幾つかの他の特徴を有して示される。それは、ピペッター・アセンブリ48中の編成ピペッターの線状アレイから僅かに離れて間隔があけられた単一チャネルピペッター63を使用して、必ずしも編成ピペッターの間隔で存在する必要はないウェルの中または外に液体をピペット操作する。それは、吸引ライン65を有してマイクロチップから試料またはマトリクスを除去し、かつ、加圧ライン67を有して必要に応じてマトリクスを運動させまたは試料注入を容易にする。加えて、多機能デバイス35は、キャピラリー、微細口径管系または体積測定デバイスと共にピペット操作デバイスを使用するごとく、試料をマイクロチップに運動させる他の手段を適応し得る。多機能デバイス35は、溶液のバルクピペット操作用の貯留部にアクセスするように適応することもできる。正確な体積測定制御が必要な場合には、圧電性配送装置も加え得る。ラックもしくはホテル(hotel)または同様なデバイスに保持される複数のマイクロチップから自動化プロセスによってマイクロチップを負荷すること、ならびに、マイクロタイター・プレートおよびピペットチップのラックも自動化機構によって置換されることは、本発明の趣旨内に存在する。
【0025】
図4に参照して、多機能デバイス35は、個別ピペットチップ101−108のアレイと、単一チャネルピペッターチップ63を運搬するように示される。チップが拾い上げられると、1ないし全てのピペッターにチップが嵌着される。各チップは流体ピペット操作機構に連結され、それは標準的なエッペンドルフ・ピペッターとし得る。ピペッターは、U−型チップ放出機110を通して延在している。空気圧シリンダー121は、命令により、チップ101−108のアレイを通して所望の量の流体をピペット操作するために、エレクトロニック・コントローラーによって制御される。微小スイッチ141および143は、ツール35が高いか低いかを感知し、かつ、他のデバイスに位置をシグナル伝達するために、2の異なる高さで、ツール35の向い合う側にマウントされる。吸引ライン65は、マイクロチップから試料またはマトリクスを除去するために、ツール35の側にマウントされる。加圧ライン67は、マトリクスを補充するため、または試料注入を支援するために用いられる。
【0026】
チップ放出機110は、当該チップ放出機の上方運動を制限する一対の終止部125および127と共に、短いレール上を昇降するようにマウントされる。コントローラーに連結された空気圧シリンダー123はチップ放出機を運動させるための力を供給する。空気圧シリンダー123がチップ放出機110を超えてチップを上昇させようとし、チップ放出機が一対の終止部125および127に対して終止した場合、チップが放出される。この状態においては、チップは上方に運動するが、チップ放出機110に対して終止し、ピペッターから落ちる。
【0027】
多機能デバイス35は、ライン(図示せず)によって供給される吸引によって適所に保持されるチップガイド129も運搬しているが、その吸引はオン−オフを命令し得る。チップガイドは、マイクロチップ流入口に向けて外側に各ピペッターからピペットチップが直線になるように、開口部131−139を有する。チップガイドは、新しいチップがピペッターに結合された後であって、チップを用いてマイクロタイター・プレートから試料を回収する前に、特定の場所から拾い上げられるアセンブリである。同様にして、チップガイドは、使用済みチップを使用済みチップホルダーまたはトレイに廃棄し得る前に開放される。
【0028】
図5に参照して、試料材料をマイクロチップ15に導入する時点で、マイクロチップ15およびチャック11はトラック20およびそのステッピング・モーターによってピペッター48の下方に直接運動し、ついでピペッターチップ101−108はマイクロチップ中の穴部に降下して試料材料を配送する。マイクロチップ中の穴部のパターンは、アレイを用いる場合にはピペッターアレイ中のチップ穴部の間隔に適合する。基板は、試料材料を種々の場所のエントリー穴部に配送し得るように、トラック20と繋がっているハウジング22中のステッピング・モーターを用いて異なる場所まで多機能デバイスの下方を運動することができる。
マイクロチップ中のマイクロチャネルは、好ましくは列にグループ化され、一列当たり8の開口部を有する。これにより、多機能デバイス上のアレイ・ピペッターは複数のマイクロチャネルに同時に供給することができる。試料を、8ないし12、おそらくはより多い試料場所、あるいは全てのマイクロチャネルが試料を有するまで全ての試料場所に同時に配送することは有利である。このことにより、複数のマイクロチャネルに対する試料負荷が顕著に速められる。例えば、96のマイクロチャネルおよび8のピペッターチップが存在する場合には、全てのマイクロチャネルに試料材料が備えられるように、基板は少なくとも12回運動させる必要があるであろう。さらに、ピペッターチップが基板中の所望の穴部に嵌合するように、基板がトラック20上の位置まで運動する間にピペッターを横方向に運動させる必要があるかもしれない。
【0029】
全ての試料を負荷した後に、ついでマイクロチップはプラットフォーム50下方の適当な位置まで運動する。基板チャック11は、空気圧24によって上昇され、プラットフォーム50の下側にマウントされた回路基板76から突出する電極として用いられる細ワイヤのアレイ78は、マイクロチップ中の開口部に自動的に挿入される。該細ワイヤは半導体産業で使用されているウエハープローブ・ワイヤに類似する自己−支持性の硬いワイヤであって、分離用のカソードおよびアノードとして使用され、マイクロチップに他の電位を供給する。通常、かかるワイヤは典型的には200μmないし500μmの直径を有し良好な導電率および耐腐食性を有する白金または他の材料である。
【0030】
ある種の電極を適当な電圧源に接続すると、電場を用いて試料は試料流入口から分離チャネルに運動し得;この運動を試料注入ともいう。ついで、電圧源を変化させて、電気泳動によって試料を分離する。典型的には、マイクロチャネルは、適当な分離媒体で予め負荷しておく。例えば、尿素およびホルムアミドと組み合わせたヒドロキシエチルセルロース(HEC)を含む分離マトリクスが、本発明の譲受人に譲渡されたJ. Bashkin, D. BarkerおよびR. Johnstonによる米国特許第5,534,123号に開示されている。
【0031】
試料移動が起きると、マイクロチップ上の検出領域がモニターされる。蛍光検出に関しては、励起光源52は、標的タグからの蛍光を刺激するであろう波長を有するように選択される。走査型共焦点レーザー顕微鏡の検出に関しては、レーザービーム励起光は、一般に“マクロ走査対物レンズ”として知られている対物レンズ56を介してマイクロチップを走査する検流計ベースの走査ミラー54に指向される。かかる対物レンズは、大きい範囲の蛍光試料を走査することにつき記載されており;例えば、蛍光イメージング系は、Robert Kainによる米国特許第5,719,391号に記載されており、本発明の譲受人に譲渡された。対物レンズはマイクロチャネル中で電気泳動移動下にある蛍光標識標的分子から放出された蛍光光を集光する。適当な波長を選択するための共焦点空間フィルターおよびフィルター群のごとき中間光学部材の後に、光電子増倍管58、CCDアレイまたは他のフォトディテクターがこの蛍光光を電気シグナルに変換し、これが収集され、プロセシングされて電気泳動図が形成される。
【0032】
図6に参照して、マイクロチップ15は、もう1のプレートに結合している(図示せず)1のプレートに形成された複数の分離マイクロチャネル61を有するように示される。背景情報として、このマイクロチップ15は、P. C. Simpson, D. Roach, A. T. Woolley, T. Thorsen, R. Johnston, G. F. SensabaughおよびR. A. Mathies, “High-throughput genetic analysis using microfabricated 96-sample capillary array electrophoresis microplates”, Proc. Natl. Acad. Sci. USA, 95:2256-2261 (1998)に記載されている。チャネルは、流体が回避できないように底プレートを有する。マイクロチャネルは、カソード貯留部として使用される開放開口部66で終結する。これらの貯留部は各チャネル用、あるいは図示するごとく、複数のマイクロチャネルを提供し得るかのいずれかとし得る。試料負荷貯留部、破線矩形列63で示される2の列は、試料を配送するためにピペッターチップが入るのに十分に大きいものとし得る。
【0033】
好ましい具体例において、試料負荷貯留部63は、後記するごとく分離マイクロチャネルを横切る注入マイクロチャネルによって、破線矩形行64で図示されている廃棄貯留部に連結される。分離マイクロチャネル端部は、マイクロチップの上面の穴部を通してアクセス可能である共通アノード貯留部65に合流する。試料負荷貯留部63、廃棄貯留部64、アノード貯留部65およびカソード貯留部66は、マイクロチップが位置に上昇した場合には電極ワイヤと個別に接触するか、あるいは、図7に図示するごとく、マイクロチップの縁部に位置する導電性コネクターで終結する、マイクロチップの表面上または中央内にめっきされた電極と各々が個別に接触する。
【0034】
図7に示すDNA断片分析に関する好ましい具体例において、分離マイクロチャネルはシャープな湾曲部71を含み得る。これらの湾曲部はバンドの広がりを導入するが、効果は、遺伝子型決定のごとき断片分析適用に許容し得る。シャープな湾曲部を用いて4"マイクロチップ上の少なくとも48の分離チャネルまでチャネル密度を増大させ、かつ、それを用いて流路長を均一にし得る。
【0035】
図7は、縁部導電性コネクター73および75をマイクロチップ導入することを図示している。縁部コネクター73および75は、半導体産業でよく知られているマスキングおよび蒸着技術を用いて、マイクロチャネルをエッチングした後に金、白金または銅のごとき金属をガラス上に蒸着させることによって形成し得る。縁部コネクターは、電子回路基板縁部コネクターのように平坦なタブである。縁部コネクターは電極として作用し、マイクロチップからの電気的接続をマイクロスケールへ単純化する。線80は、外部からの電気コネクターへのアクセスを許容する基板上のカバーがどこで終結するかを示している。線80の下方では、基板は電気ターミナル上にカバーを有し、そこではカバーを通して延在する入口72、74、76を通る以外はターミナルがアクセス不可能である。縁部コネクター73の部分はカソード・ターミナルであり、一方縁部コネクター75はアノード・ターミナルである。三組配置の入口72、74、76により、試料をマイクロチャネル82に注入するための主マイクロチャネル82の部分を横切る試料の運動が許容される。マイクロチャネル82は、全てのマイクロチャネルが平行アレイとなっている主トランク86に通じる路湾曲部84を有する。
【0036】
好ましい具体例において、蛍光検出は、走査型共焦点レーザー顕微鏡を用いて、走査線77、アノード口79から遠くない仮想線、で起こる。走査線77におけるレーザー走査は平行アレイのマイクロチャネルに対して横方向である。ロケーター穴部78を用いて、マイクロチップを所望の場所に位置決定する。
【0037】
図8に参照して、マイクロチップ120は、ハブとしてスポーク−様パターンの認識(considering)コレクター130を有する放射状に分布したマイクロチャネル123を有する。マイクロチャネルの数は、マイクロチップのサイズによって支配される。大きなアレイであれば、共通コレクターの周りに360°パターンのマイクロチャネルを有するであろう。マイクロチャネルはガラスウエハーにエッチングされ、これは同様または同一の直径の第2のフラットウエハーでカバーされる。各放射状マイクロチャネルはコレクター130に向けて集まる。コレクターは、電極を挿入し得るアノード口126に接続された端部貯留部である。走査線140は仮想線であり、そこで、走査ビームはコレクター130の非常に近くで、集結するマイクロチャネルを横断するでろう。ビーム、典型的にはレーザービームは、マイクロチャネル中で蛍光を励起し、放射された蛍光はディテクターによって測定されるであろう。各マイクロチャネルは、各々、カソード、廃棄および試料貯留部につき三組の流入口131、133および135を有する。路波状起伏部137は、エレクトロ・マイグレーション目的で全ての路が同一の長さとなるように、路長を一様にする目的で導入される。
放射状構成のマイクロチャネルは、注入領域と検出領域との間に湾曲部または曲がり部が存在しないという利点を有する。該湾曲部または曲がり部は、分離物の品質を低下させ、DNAシークエンシングに必要な高分解能の分離を妨げ得る。
【0038】
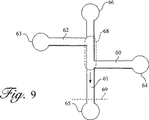
図9においては、図6−8に図示した注入機および三組の流入口の詳細を拡大している。試料貯留部63は、廃棄貯留部64へのマイクロチャネル路を有するように示し得る。各貯留部は、マイクロチャネルに通じる、マイクロチップ表面に直径約2mmの開口部を有する。全ての試料が負荷貯留部63に負荷された後、試料は、負荷貯留部と廃棄貯留部との間の電位差を用いて第2突出マイクロチャネル60を介して廃棄貯留部に向けて突出マイクロチャネル62を通って運動する。別の具体例は、毛管作用、圧力、磁気、光学捕捉、等電点電気泳動、および真空注入法を使用して、試料を分離マイクロチャネルに運動させ得る。典型的には、3ないし5μlを負荷貯留部63に挿入するが、注入領域68の体積は150plないし5nlしか含有しない。この微視的体積しか、電場の影響下で分離チャネル61中で分離されない。
【0039】
好ましい具体例における試料注入に関する一連の事象は、バイアス電圧をアノード貯留部65およびカソード貯留部66に加えて分離チャネル61への試料拡散を防ぎつつ、注入電圧を各セットの試料負荷貯留部63および廃棄貯留部64の間に加えることである。注入電圧は、試料負荷貯留部63および廃棄貯留部64の間のマイクロチャネルの注入領域68、および分離マイクロチャネル61に試料が運動するまで、維持する。
【0040】
ついで、試料負荷貯留部63および廃棄貯留部64に逆バイアス(back bias)を加えてさらなる試料が分離マイクロチャネル61に入るのを防ぎつつ、分離電圧をアノード貯留部65とカソード貯留部66との間に加える。チャネル長に依存して、分離電圧は典型的に50ないし300V/cmであって、逆バイアスは典型的に90ないし1000Vである。分離電圧は、試料が走査領域69を通過するまで加える。注入領域68から走査領域69のディテクターまでの典型的な分離路長は10cmである。ディテクターは、最大限の分離を達成し得るように、分離チャネル61の直線部分の端部にできるだけ近接して配置する。典型的な分離時間は、断片に関しては5分、DNAシークエンシングに関しては5ないし10分である。
注入領域68からアノード65までの全ての路は等しい長さを有するのが好ましく、さらに、カソード貯留部66からアノード65までの路は等しい長さを有し、試料負荷貯留部63から廃棄貯留部64までの路は等しい長さを有するのが好ましい。
【0041】
スキャナーからの光学ビームは、走査領域を横断してスイープし、領域を照射して標識標的分子の蛍光を生じさせる。マイクロチャネルの走査範囲は、分離が最も良好に測定される範囲である。標的分子は、色素または蛍光物質で標識されている。標的分子を照射すると、光学シグナル・ディテクターによって同時に測定されるスキャナーによる刺激の際に、色素、蛍光タグまたは標的物質の特徴的な光学シグナルが放出されるであろう。複数の色または波長を用いて、異なる標的を識別する。現在のところ、DNAシークエンシングに関しては、4のヌクレオチド塩基に対応する4の色が用いられているが、異なる色を分離するディテクターの能力、蛍光を発生するビームの能力、および特定の適用に依存していずれの数を用いてもよい。遺伝子型決定に関しては、より多くの色は分離チャネル当たりより多くの試料を多重送信し得るであろうが、典型的に1または2の色を用いる。
【0042】
図6−8のマイクロチャネル配置により、走査領域を横切る単一のビーム走査で多くのチャネルを走査することができる。ビームは公知またはホーム位置から出発し、公知の走査速度で各マイクロチャネルを順次照射する。走査の特徴を知ることによって、正確なビーム位置がわかり、したがって照射されたマイクロチャネルの同一性がわかる。典型的に、ビームのスポットサイズは、マイクロチャネルの幅よりも遥かに小さい10μmである。多数の分離を同時に行い得るため、シークエンシングのごとき分析作業における時間が大幅に減じられる。分離データから、標的試料を同定し得る。
【0043】
電極に電圧を加えることを中止し、データファイルをセーブし、マイクロチップを含有する真空チャックを低下させることによって運転が終結する。ついで、マイクロチップを有する真空チャックは、第1トラック20に沿ってマイクロチップ設置位置に運動し、そこで、マイクロチップは手動で除去される。電極ワイヤは、図2に図示するごとく、洗浄ステーション10が電極の下方に位置するまで第1トラック20を運動させることによって掃除される。掃除溶液を含有する洗浄ステーションは、電極が掃除されるまで昇降する。
【0044】
図10に参照して、第1トラック上のプラットフォームから電極を支持するために使用される回路基板76は、5の独立ワイヤ(または線)路164、164a、174、184および194を有して示されている。各路は、線に沿った白丸として示される、1またはそれを超える電極ターミナルに電力ターミナルを接続する。電極ターミナル163および163aは、ワイヤ線164および164aならびに試料ターミナル165および165aに接続されている。電極ターミナル173は、ワイヤ線174およびカソード貯留部ターミナル175に接続されている。電極ターミナル183は、ワイヤ線184および廃棄貯留部ターミナル185に接続されている。電極ターミナル193はワイヤ線194およびアノード貯留部ターミナル195に接続されている。ワイヤ線164、164a、174、184または194のいずれも他のワイヤ線を交差しないが、ワイヤ線は互いに絶縁関係で存在することは注記しておく。前記した電極ワイヤは、試料ターミナル165および165a、カソード貯留部ターミナル175、廃棄貯留部ターミナル185、ならびにアノード貯留部ターミナル195に接続されるが、図10に図示していない。ワイヤは、自己−支持様式で回路基板76から垂直に延在する。回路基板76は、移動測定に使用されるマイクロチップのすぐ上方であってマイクロチップの走査領域の直近のプラトフォーム50の下面と当該基板の底面が一般的に平行となるようにマウントされる。
適当な電圧をターミナル163、163a、173、183および193に加える。各線の長さにわたる電圧低下は存在しない、すなわち各線の抵抗は非常に小さく、低い電流しか流れていないため、各接続ワイヤの長さにわたって同一の電圧が現れる。
【0045】
エレクトロニクスは4のモジュール:運動制御、高電圧制御、データ取得および種々雑多なもの、からなる。
図11に参照して、運動制御エレクトロニクスは、4のRS−232コミュニケーション・ポートを介して4のモーター・コントローラー210、214、218および222と通信するコンピュータ200、好ましくはWindows NT Workstation、によって制御される。モーター・コントローラー210は、X−軸でガントリを動かすモーター212を制御する。モーター・コントローラー214は、Z−軸を動かすモーター216を制御する。モーター・コントローラー218は、第1のY−軸を動かすモーター220を制御する。モーター・コントローラー222は、第2のY−軸を動かすモーター224を制御する。
【0046】
ワークステーション200は、Intel 386SX装着コントローラーのごとき、コンピュータを含む制御モジュール228とも、SCSIバス・ライン226を介してコミュニケートする。ワークステーション200は、データを取扱いおよび表示機能を行う一方、制御モジュール228はデータ収集機能を指揮するのみである。制御モジュールはリレイ回路230を使用して、5の空気圧バルブ232、234、236、238および240を動かす。空気圧バルブ232はシリンダーを動かして、多機能デバイスのステージを下方に運動させる。空気圧バルブ234はシリンダーを動かして、多機能デバイスのステージを上方に運動させる。空気圧バルブ236はシリンダーを動かしてピペット・プランジャーを下方に運動させる。空気圧バルブ238は、シリンダーを動かして、基板チャックを上方に運動させる。基板チャックを下方に運動させるためには、バルブ238が圧力を開放し、重力が基板チャックを下方にもたらす。空気圧バルブ240は真空を供してチップガイドを多機能デバイスに保持させ、あるいは、真空を開放してチップガイドを開放する。もう1つの手動式空気圧バルブ(図示せず)を使用して、真空チャックにマイクロチップを保持する真空を作動させる。
【0047】
図12は、データ取得エレクトロニクスの概略図である。マイクロチップ中の試料からの蛍光は、まず、Hanamatsu R1477のごとき光電子増倍管250で検出する。光電子増倍管のバイアス電圧を制御して、光電子増倍管の出力範囲を選択する。光電子増倍管の出力は電流であり、典型的には100fAないし100μAの範囲内である。ついで、電流を増幅させ、トランスインピーダンス増幅器252によって0.001Vから100Vまでの電圧に変換する。ついで、トランスインピーダンス増幅器の出力を、対数減衰増幅器254によって、0Vより大きい値から10Vまでの範囲でデータの対数表示に変換する。ついで、シグナルを、65,536のダイナミック・レンジを供する16ビットにシグナルをデジタル化するBurr-Brown ADS7805 Analog to Digital Convertorのごとき16−ビットA−Dコンバーター256を通す。ついで、A−Dコンバーター256の出力を、まず真数変換を行い、ついで適当な間隔でトランスインピーダンス増幅器252への内部参照信号入力に基づいて直線性補正を行い、最後にシグナルの平方根を行ってシグナルを16ビットに圧縮する、Motorola 56000 Digital Signal Processorのごときデジタルシグナルプロセッサー258によってプロセシングする。デジタルシグナル・プロセッサー258の出力は、前記コントローラー228に伝送され、これはついでSCSIコミュニケーション・ライン226を介してコンピュータ200にデータを伝送する。
【0048】
図13に参照して、高電圧制御エレクトロニクスは、SCSIコミュニケーション・ライン226を介してコントローラー228と通信するコンピュータ200によって制御される。制御モジュール228は、6のD−Aコンバーターを含むD−A回路260を制御する。D−Aコンバーターは、6の高電圧電源262、264、266、268、269および270の出力電圧を制御する。高電圧電源270は、光電子増倍管250にバイアス電流を供給する。5の高電圧電源262、264、266、268および269はスイッチング・ネットワーク272を通して電極回路275に接続された電流源である。スイッチング・ネットワーク272は、電流シンク(current sink)としての接地電位または電流源としての高電圧電源のいずれかを選択し得る高電圧リレイを含む。高電圧電源262は、好ましい具体例において、アノードについての電極回路275に5000Vまで供給し得る。他の4の高電圧電源264、266、268および269は、各々、カソード、廃棄および2の試料電極に1500Vまで供給し得る。
【0049】
図14に参照して、高電圧制御エレクトロニクスは、SCSIコミュニケーション・ライン226を介して制御モジュール228と通信するコンピュータ200によって制御される。制御モジュール228は、電圧パルスを検流計運転回路282に送るデジタルシグナル・プロセッサー280を制御する。検流計運転回路282は、上にマウントされた走査ミラー285を有する、General Scanning G325のごとき検流計284に電圧を送る。レーザー52からのレーザービーム281は、走査ミラー54に指向される。検流計運転回路を制御することによって、検流計の位置を容易に調整して、ビーム281を用いたマイクロチップ299を横断する線走査を行い得る。別の具体例は、2軸で制御可能である検流計を用いて、より大きな断面積を走査し、またはマイクロチップの任意の好ましいセクションを選択して走査し得る。制御モジュール228は、5のセンサー、286、288、290、292および294からのシグナルを受けるデジタル入力回路を制御する。4のセンサー、286、288、290および292は、単一極板の単一スロースイッチ(throw switch)である。チップガイドがテーブル上に存在する場合にはセンサー286が感知する。マルチチャネル・ピペッターが上昇し、したがってピペットチップが放出された場合にはセンサー288が感知する。ピペット・ステージが上昇した位置に存在する場合にはセンサー290が感知する。マイクロチップ・チャックが上昇した位置に存在する場合には、センサー292が感知する。ピペットチップ・カウンター294は、ビームが遮られると感知し得る、Skan-a-matic L60/P60シリーズ準小型LED−IREDペアのごとき通過ビーム光源およびディテクターである。ピペットチップ・カウンター294を用いて、多機能デバイス上のピペット数をカウントして、ピペットチップの拾い上げまたは放出を確かめる。
【0050】
図11ないし14に記載したエレクトロニクスは、ソフトウェアによって制御される。制御ソフトウェアは6の主要な機能ユニットを有する。機能ユニットは:(1)イニシャライズ、(2)試料負荷、(3)マイクロチップ負荷、(4)試料注入、(5)分離および走査、ならびに(6)運転終結、である。機能ユニットは、モジュール、サブルーチン、オブジェクト、スクリプトまたは他の構成としてのプログラミング言語で組み入れ得る。
【0051】
イニシャライズ機能ユニットは、エレクトロニクス、ステージ、多機能デバイスおよびY−ステージをイニシャライズすることによってシステムを準備させる。イニシャライゼーションは、エレクトロニクスをイニシャライズすること、ステージを自動誘導させること、いずれかのピペットチップを放出し、いずれかの液体もしくは微小流体サブシステムを調製することによって多機能デバイスをイニシャライズすること、ならびに該ステージを運動させて試料負荷の準備させること、よりなる。
【0052】
試料負荷機能ユニットは、試料をマイクロタイター・プレートのごとき貯留部からマイクロチップに負荷する。ソフトウェアは各プレートについてプロセシングを制御する。プレートからの試料は、多機能デバイスによって同時に移すことができる一連のウェルによってくくる(loop through)ことができる。新しいピペットチップおよびチップガイドを拾い上げる。ついで、プレートからピペッターに試料を負荷する。多機能デバイスをマイクロチップに運動させる。マイクロチップにおいて、試料を試料負荷ウェルに置く。ついで、プレート中の一連のウェルを、マイクロチップが完全に負荷されるまで、くくる。マイクロチップが完全に負荷されていない場合、残っているウェルを記録する。負荷した一連のウェルは列、行または分離したウェルとし得る。もう1つの具体例において、キャピラリー負荷機(loader)のごときデバイスにより同時に負荷することによって、あるいは試料を含有するもう1つのマイクロチップから、多チャネルを有する圧電性エレクトリック・デバイスから、または他の負荷ストラテジーによって、全試料を一度に負荷し得る。
【0053】
マイクロチップの負荷機能ユニットは、必要によりステージをイニシャライズし、負荷したマイクロチップをスキャナーの位置に運動させ、および光学検出系を用いる場合にはディテクターの焦平面の位置にマイクロチップを収容する。
試料注入機能ユニットは、試料負荷口からの試料をマイクロチップの注入領域まで運動させるようにデザインされている。試料注入機能ユニットは、各電極への高電圧電力を制御する注入プロフィールを設定し、実行する。プロフィールは電極、電位差、および各電位差についての時間を特定する。単純または複雑な注入および分離プロフィールを用い得る。他の具体例において、圧力、毛管流動、磁気、または他の手段をプロフィールとして用いて、試料を試料負荷口から注入機に運動し得る。
【0054】
分離および走査機能ユニットは全機能を行って、コンポーネントの分析および検出用の構成コンポーネントに注入試料を分離する。高電圧源は、まず分離プロフィールに設定する。データについてのファイル名を選択し、データ・ファイルを作成する。データ収集エレクトロニクスを診断し、補正し、パラメータを設定し;該パラメータには、ライン当たりの画素数、ラインの数、データ収集エレクトロニクスの時間的調節、または他の情報が含まれ得る。光電子増倍管バイアス電圧を設定する。なお、複数の光電子増倍管が存在し得る。検流計を始動する。ついで、分離プロフィールを開始し、電圧を電極に加える。走査を開始し、走査パラメータが行われるまで全てのデータ・パケットを判読する。ついで、検流計を停止し、光電子増倍管および電源への電圧を0または他の電位にリセットする。
運転終結機能ユニットにおいては、必要に応じてステージをイニシャライズし、ついで洗浄トレイを電極下に移動する。ついで、水とし得るかまたはさらなるコンポーネントを有し得る掃除溶液に電極を浸漬しつつ、間隔を置いて洗浄トレイを上下に運動させることによってそれを掃除する。もう1つの具体例は、1または一連の液体または気体で電極を洗浄すること、または、加熱、プラズマ処理、マイクロ波、または電極を掃除するための他の方法によって電極を洗浄することである。
【0055】
運転終止機能ユニットを実行した後、該システムはもう1つのサイクルの準備ができている。もう1つのマイクロチップを用いる場合には、システムをイニシャライゼーション機能ユニットで始動し得る。別法として、複数の試料を各分離チャネルに多重化する場合、ソフトウェアは注入試料機能ユニットにつづいて分離および走査、ならびに運転終止機能ユニットに続行し得る。
【0056】
前記した具体例において、平行で、間隔のあけた線状トラックを、横断ガントリと一緒に示して、試料でマイクロチャネルを負荷し、化学試験および分析を行うタスクを成し遂げるために必要な自動制御運動を供した。洗浄形式を用いる必要はない。
【0057】
図15は、矢印Aによって示されるいずれかの向きで回転しつつ、中心軸73の周りに移動アーム自動制御71が回転する回転形式を図示する。移動アーム71は、マイクロチップを拾い上げるためのツール、ならびに試料スタック94から試料のカセットを、新たなチップ・スタック93から新たなチップを、使用済みチップスタック91から使用済みチップ・カセットを、およびスタック95から洗浄または他のカセットを抜き取るためのカセット拾い上げツールを有するグリッパー・アーム75を運搬している。移動アーム71は、複数の放射状に配された貯蔵場所の上を旋回し得、そこで、これらのカセットは保存され、矢印Bによって示される直線向きで運動することができる線状トラックを有する負荷ステーション90にそれらを運動させる。
【0058】
第1フレームを含む負荷ステーション90は、昇降運動し得る編成ピペッターを含む多機能ツールをマウントするガントリ77によって橋かけされている。新たなチップは、まず、ガントリ77上に運搬される多機能ツールによってチップ・ラック84の外側に拾い上げられる。これには、負荷ステーション90が、ガントリ77上の多機能デバイス上に支持される編成ピペッターが新たなチップに到達し、それをピペッターに押し付け得るように、ガントリ77下にチップラック84を前進させることが必要である。ピペッターが下方に運動し、所望の量の試料を拾い上げ得るように、ピペッターは上昇し、試料ラック85はガントリの下方に置かれる。ついで、マイクロチップ・ステーション83のマイクロチップはガントリ77の下方に運動し、試料は前記したようにマイクロチップ中の穴部に入る。全てのマイクロチップ・ウェルが試料で負荷されるまで、負荷シークエンスを繰返す。
【0059】
マイクロチップ・ステーション83のマイクロチップが試料で負荷されると、スキャナーがプラットホーム81によって支持されている第2フレームを含む分析ステーション77にグリッパー・アーム75がマイクロチップを運動させる。その後、グリッパー・アームは、マイクロチップ・ホテルまたはカセット80のスタックのもう1つのマイクロチップを取り、それをさらなるプロセシングのためにマイクロチップ・ステーション83に運動させる。
【0060】
分析ステーション77は、もう1つのマイクロチップを負荷ステーション90で負荷しつつ、1つのマイクロチップを同時に分析し得る。分析ステーション77は、前記したごとき試料注入および分離を刺激するためにマイクロチャネル中の液体と接触させるマイクロチップ中のバイアス(vias)または開口部に挿入された電極をも支持している。試料注入、ついでスキャナー、好ましくは走査型共焦点顕微鏡によって走査しつつ、電気泳動分離を刺激するために適当な電圧を加える。データ収集が完了したら、さらに使用する前に洗浄ウェル中で濯ぐことによって電極を掃除し得るように、スキャナー下方の洗浄ウェル88の位置までステージが運動し、グリッパー・アーム75は使用済みマイクロチップ・スタック92までマイクロチップを運動させ得る。エレクトロニクスおよび制御ソフトウェアは、前記したものと同様であろう。
【0061】
本明細書において、“ピペッター”という場合、その語は、限定されるものではないが、単一ピペッター、多チャネル・ピペッター、キャピラリー・ピペッターまたは微小流体デバイス、圧電性デバイスまたは流体を運動させるための他の手段を包含すると理解されるべきである。“プレート”という場合、その語は、限定されるものではないが、マイクロタイター・プレート、管、マイクロアレイ・デバイス、貯留部または微小流体デバイスのごとき試料を保存もしくは産出し得るデバイスを包含すると理解されるべきである。前記の主要な例は電気泳動に関するが、同様な装置をエレクトロ・クロマトグラフィー、ガスクロマトグラフィーおよび液体クロマトグラフィーに用い得るであろう。また、マイクロチャネルの充填もマイクロピペッター・デバイスに限定されるものではない。例えば、小さなキャピラリーを用い得るであろう。かかる非−ピペッター・デバイスは、マイクロチップにおける穴部間隔に合致しなくてもよい。
【図面の簡単な説明】
【図1】 図1は、試料分析ディテクター、チップカウンターまたはチップガイドを有していない、本発明の装置の斜視図である。
【図2】 図2は、試料分析ディテクターおよびチップガイドを有する、図1の装置の上面図である。
【図3】 図3は、チップガイドを有する、図1の装置の正面平面図である。
【図4】 図4は、図1の装置に使用した多機能デバイスの詳細正面図である。
【図5】 図5は、試料分析ステーションおよびディテクターの部分断面図を有する、図1の装置の左側面図である。
【図6】 図6は、図1の装置に使用するためのマイクロチップ上のマイクロチャネル構造の拡大上面図である。
【図7】 図7は、図6に示した構造の別の具体例を示す上面図である。
【図8】 図8は、図6に示した構造の別の具体例を示す上面図である。
【図9】 図9は、図6−8に示したマイクロチップ中のマイクロチャネル路の簡略図である。
【図10】 図10は、図1の装置に使用するための電極接続を示す回路基板の平面図である。
【図11】 図11は、図1の装置に使用した運動制御エレクトロニクスに関する電気的平面図である。
【図12】 図12は、図1の装置に使用したデータ収集エレクトロニクスに関する電気的平面図である。
【図13】 図13は、図1の装置に使用した高電圧制御に関する電気的平面図である。
【図14】 図14は、図1の装置に使用したセンサーおよび光学スキャナーに関する電気的平面図である。
【図15】 図15は、本発明の装置の別の具体例を示す平面図である。
Claims (14)
- マイクロチャネル化学分析をロボット制御( robotically )で実施する方法であって、
a)負荷ステーションの第1マイクロチップ基板に複数の流入口を有するマイクロチャネルを供する工程;
b)マイクロチャネルから間隔をあけて試料ウェルの群を供する工程;
c)流入口および試料ウェルへと運動可能なマイクロチャネル負荷デバイスを供する工程;
d)負荷デバイスを試料ウェルにロボット制御で運動させ、特徴的な移動速度を有する検出可能な標的分子を有する試料をロボット制御で拾い上げ、ついで流入口に運動させる工程;
e)試料をロボット制御で複数の流入口に同時に分配する工程;
f)所望の数の流入口が試料を受けるまで、工程d)およびe)を繰返す工程;
g)上記第1マイクロチップ基板が上記負荷ステーションから離れるようにロボット制御で運動させ、置換マイクロチップ基板が収容できるように上記負荷ステーションを開放する工程;
h)所望の試料分離が達成されるまで上記第1マイクロチップ基板のマイクロチャネル中で試料分離を引き起こさせる工程;ついで
i)測定場所(location)で上記試料分離を検出する工程
を含み、マイクロチャネル負荷デバイスを供する工程c)が、さらに、マイクロチップ基板用のステージを有する第1トラック、ならびに試料ウェルおよびピペッターチップ用のステージを有する第2トラックを含む運動可能なステージを有する2つの平行トラックを、上記2つのトラックの間を運動可能である負荷デバイスと共に供することを含む、方法。 - さらに、工程g)の後に、前記負荷場所で前記第1マイクロチップ基板を前記置換基板でロボット制御で置換することを含む請求項1記載の方法。
- 前記負荷ステーションにおいて前記第1マイクロチップ基板を前記置換基板でロボット制御で置換することが、前記第1基板を、基板内に含まれる試料を有していない置換基板で置換することを含む請求項2記載の方法。
- さらに、前記試料分離を検出した後に、前記測定場所から前記第1マイクロチップをロボット制御で運動させ、前記置換マイクロチップ基板のために前記測定場所を開放し、ついで置換マイクロチップ基板を用いて工程b)−i)を繰返すことを含む請求項2記載の方法。
- 前記第1マイクロチップ基板を用いて工程h)およびi)を同時に実施し、前記置換マイクロチップ基板を用いて工程d)、e)およびf)を実施することを特徴とする請求項4記載の方法。
- さらに、複数の置換マイクロチップ基板を用いて工程c)−i)を連続して繰返すことを含み、工程h)およびi)を前記複数のマイクロチップ基板のうちの1つの上で同時に実施し、工程d)、e)およびf)を他のマイクロチップ基板を用いて実施することを特徴とする請求項4記載の方法。
- さらに、工程g)の後に、前記試料ウェル中の前記試料をロボット制御で置換することを含む請求項4記載の方法。
- 前記第1マイクロチップ基板のマイクロチャネルで試料分離を引き起こすことを、前記基板上の複数の個別マイクロチャネルがアノード・ワイヤおよびカソード・ワイヤと接触するように複数のワイヤとチップを接触させて位置させるようにチップをロボット制御で運動させ、ついで前記マイクロチャネルを通して電流を導入して電気泳動分離を実施することを特徴とする請求項1記載の方法。
- 前記検出が、複数のマイクロチャネルを光学的に走査することによってさらに特徴付けられる請求項1記載の方法。
- 前記光学的走査が、複数のマイクロチャネルを共焦点光学的に走査することによってさらに特徴付けられる請求項9記載の方法。
- 前記走査が、前記試料分離と同時に起こる請求項9記載の方法。
- マイクロチップ基板にマイクロチャネルを供することが、走査領域を画定する横断線と平行にまたは角度をなして配置されたマイクロチャネルを供することを含む請求項9記載の方法。
- マイクロチャネル負荷デバイスを供する工程が:
マイクロチャネル基板を負荷ステーションの第1トラック上に運動可能にマウントし;
試料ウェルを第2トラック上に運動可能にマウントし;ついで
多機能マイクロチャネル負荷デバイスを、第1トラックと第2トラックとにまたがる(spanning)ガントリ上にマウントすることを含む請求項1記載の方法。 - マイクロチャネル負荷デバイスを供する工程が、試料ウェルおよび流入口の間隔に等しい間隔で複数のピペッターを供することを含む請求項1記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/109,676 | 1998-07-02 | ||
| US09/109,676 US6627446B1 (en) | 1998-07-02 | 1998-07-02 | Robotic microchannel bioanalytical instrument |
| PCT/US1999/006359 WO2000002038A1 (en) | 1998-07-02 | 1999-03-23 | Robotic microchannel bioanalytical instrument |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002519695A JP2002519695A (ja) | 2002-07-02 |
| JP4260369B2 true JP4260369B2 (ja) | 2009-04-30 |
Family
ID=22328941
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000558383A Expired - Fee Related JP4260369B2 (ja) | 1998-07-02 | 1999-03-23 | 自動制御マイクロチャネル生体分析機器 |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US6627446B1 (ja) |
| EP (2) | EP2056113A3 (ja) |
| JP (1) | JP4260369B2 (ja) |
| WO (1) | WO2000002038A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210133711A (ko) * | 2020-04-29 | 2021-11-08 | 경희대학교 산학협력단 | 적어도 하나의 미세유동구조물을 포함하는 미세 유동 장치 및 이에 공급된 시료의 분석방법 |
| KR20210133712A (ko) * | 2020-04-29 | 2021-11-08 | 경희대학교 산학협력단 | 적어도 하나의 미세유동구조물을 포함하는 미세 유동 장치 및 이에 공급된 시료의 분석방법 |
| KR20210133713A (ko) * | 2020-04-29 | 2021-11-08 | 경희대학교 산학협력단 | 미세유동장치 및 이를 포함하는 시료 분석 장치 |
Families Citing this family (115)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE363339T1 (de) * | 1998-05-01 | 2007-06-15 | Gen Probe Inc | Rührvorrichtung für den fluiden inhalt eines behälters |
| US6787111B2 (en) * | 1998-07-02 | 2004-09-07 | Amersham Biosciences (Sv) Corp. | Apparatus and method for filling and cleaning channels and inlet ports in microchips used for biological analysis |
| US6132685A (en) * | 1998-08-10 | 2000-10-17 | Caliper Technologies Corporation | High throughput microfluidic systems and methods |
| US6132582A (en) * | 1998-09-14 | 2000-10-17 | The Perkin-Elmer Corporation | Sample handling system for a multi-channel capillary electrophoresis device |
| AU3157800A (en) * | 1999-02-22 | 2000-09-14 | Evotec Biosystems Ag | Utilization of supporting material in capillary electrochromatography |
| EP1360992A3 (en) * | 1999-06-22 | 2004-05-19 | Caliper Life Sciences, Inc. | Apparatus for the operation of a microfluidic device |
| US6811668B1 (en) | 1999-06-22 | 2004-11-02 | Caliper Life Sciences, Inc. | Apparatus for the operation of a microfluidic device |
| US6508986B1 (en) * | 1999-08-27 | 2003-01-21 | Large Scale Proteomics Corp. | Devices for use in MALDI mass spectrometry |
| CA2290731A1 (en) * | 1999-11-26 | 2001-05-26 | D. Jed Harrison | Apparatus and method for trapping bead based reagents within microfluidic analysis system |
| US6432290B1 (en) | 1999-11-26 | 2002-08-13 | The Governors Of The University Of Alberta | Apparatus and method for trapping bead based reagents within microfluidic analysis systems |
| US20010025792A1 (en) * | 2000-03-14 | 2001-10-04 | Shaorong Liu | Pseudoradial electrophoresis chip |
| US7163660B2 (en) * | 2000-05-31 | 2007-01-16 | Infineon Technologies Ag | Arrangement for taking up liquid analytes |
| JP2004501745A (ja) * | 2000-06-26 | 2004-01-22 | ビスタラブ テクノロジーズ インク | 自動ピペット識別および先端部取外し |
| JP2002022752A (ja) * | 2000-07-13 | 2002-01-23 | Suzuki Motor Corp | 検体試験装置 |
| CN100394171C (zh) * | 2000-08-02 | 2008-06-11 | 卡钳技术有限公司 | 基于分离的高处理量分析系统 |
| US7270730B2 (en) * | 2000-08-04 | 2007-09-18 | Essen Instruments, Inc. | High-throughput electrophysiological measurement system |
| US7027683B2 (en) * | 2000-08-15 | 2006-04-11 | Nanostream, Inc. | Optical devices with fluidic systems |
| US6852291B1 (en) * | 2000-10-11 | 2005-02-08 | Innovadyne Technologies, Inc. | Hybrid valve apparatus and method for fluid handling |
| US7135146B2 (en) * | 2000-10-11 | 2006-11-14 | Innovadyne Technologies, Inc. | Universal non-contact dispense peripheral apparatus and method for a primary liquid handling device |
| US7033475B2 (en) | 2000-10-25 | 2006-04-25 | Shimadzu Corporation | Electrophoretic apparatus |
| US6835293B2 (en) | 2001-07-09 | 2004-12-28 | Greiner Bio-One Gmbh | Analysis system |
| AT500433B1 (de) * | 2001-07-09 | 2008-09-15 | Greiner Bio One Gmbh | Analysevorrichtung |
| ES2329986T3 (es) | 2001-09-06 | 2009-12-03 | Rapid Micro Biosystems Inc | Deteccion rapida de celulas en replicacion. |
| ATE377763T1 (de) * | 2002-01-25 | 2007-11-15 | Innovadyne Technologies Inc | Kontaktloses verfahren zur verteilung geringer flüssigkeitsvolumen |
| US20030217923A1 (en) * | 2002-05-24 | 2003-11-27 | Harrison D. Jed | Apparatus and method for trapping bead based reagents within microfluidic analysis systems |
| US20060088447A1 (en) * | 2002-05-28 | 2006-04-27 | Pss Bio Instruments | Specimen distributing device, coating part manufacturing method, specimen distributing method and substrate activating device |
| US7452712B2 (en) | 2002-07-30 | 2008-11-18 | Applied Biosystems Inc. | Sample block apparatus and method of maintaining a microcard on a sample block |
| EP1551275B1 (en) * | 2002-10-10 | 2015-06-03 | Visualsonics Inc. | Integrated multi-rail imaging system |
| US8078256B2 (en) * | 2002-10-10 | 2011-12-13 | Visualsonics Inc. | Integrated multi-rail imaging system |
| JP4254437B2 (ja) * | 2002-10-15 | 2009-04-15 | セイコーエプソン株式会社 | 液状体の充填方法、液状体の充填装置、及び吐出装置 |
| AU2003287449A1 (en) * | 2002-10-31 | 2004-05-25 | Nanostream, Inc. | Parallel detection chromatography systems |
| US6936167B2 (en) * | 2002-10-31 | 2005-08-30 | Nanostream, Inc. | System and method for performing multiple parallel chromatographic separations |
| JP3765788B2 (ja) * | 2002-11-29 | 2006-04-12 | 照明 伊藤 | 検体分注システム |
| EP2404676A1 (en) | 2002-12-30 | 2012-01-11 | The Regents of the University of California | Microfluidic Control Structures |
| US7249529B2 (en) * | 2003-03-28 | 2007-07-31 | Protedyne Corporation | Robotically manipulable sample handling tool |
| EP1617951A4 (en) * | 2003-04-08 | 2006-08-02 | Irm Llc | MATERIAL REMOVAL AND DISCHARGING DEVICES, SYSTEMS AND METHODS |
| JP2006526407A (ja) * | 2003-06-05 | 2006-11-24 | バイオプロセッサーズ コーポレイション | プロセス自動化のためのシステムおよび方法 |
| US6878538B1 (en) * | 2003-10-28 | 2005-04-12 | Cyto Pulse Sciences, Inc. | Apparatus for receiving and aligning a multiple electrode pair array and a multiple treatment cell for use in electroporation |
| US7799553B2 (en) * | 2004-06-01 | 2010-09-21 | The Regents Of The University Of California | Microfabricated integrated DNA analysis system |
| US7258776B2 (en) * | 2004-07-08 | 2007-08-21 | Applera Corporation | Capillary array assembly for loading samples from a device, and method |
| JP2008513022A (ja) | 2004-09-15 | 2008-05-01 | マイクロチップ バイオテクノロジーズ, インコーポレイテッド | マイクロ流体デバイス |
| US7618590B2 (en) * | 2005-06-29 | 2009-11-17 | Cascade Microtech, Inc. | Fluid dispensing system |
| US9057046B2 (en) * | 2005-09-26 | 2015-06-16 | Rapid Micro Biosystems, Inc. | Cassette containing growth medium |
| JP4086065B2 (ja) * | 2005-10-03 | 2008-05-14 | 株式会社日立製作所 | キャピラリアレイを用いた電気泳動装置及びそれに用いられるサンプルプレートアセンブリ |
| US20070199821A1 (en) * | 2005-10-05 | 2007-08-30 | Chow Andrea W | Automated two-dimensional gel electrophoresis |
| US7749365B2 (en) | 2006-02-01 | 2010-07-06 | IntegenX, Inc. | Optimized sample injection structures in microfluidic separations |
| JP5063616B2 (ja) | 2006-02-03 | 2012-10-31 | インテジェニックス インコーポレイテッド | マイクロ流体デバイス |
| JP4548359B2 (ja) * | 2006-02-20 | 2010-09-22 | 株式会社島津製作所 | 反応キット処理装置 |
| US7766033B2 (en) * | 2006-03-22 | 2010-08-03 | The Regents Of The University Of California | Multiplexed latching valves for microfluidic devices and processors |
| US20080020467A1 (en) * | 2006-07-20 | 2008-01-24 | Lawrence Barnes | Fluid metering in a metering zone |
| WO2008052138A2 (en) | 2006-10-25 | 2008-05-02 | The Regents Of The University Of California | Inline-injection microdevice and microfabricated integrated dna analysis system using same |
| JP4910728B2 (ja) * | 2007-01-31 | 2012-04-04 | セイコーエプソン株式会社 | 検査装置およびその使用方法 |
| US20080179286A1 (en) * | 2007-01-29 | 2008-07-31 | Igor Murokh | Dielectric plasma chamber apparatus and method with exterior electrodes |
| WO2008115626A2 (en) | 2007-02-05 | 2008-09-25 | Microchip Biotechnologies, Inc. | Microfluidic and nanofluidic devices, systems, and applications |
| WO2009015296A1 (en) | 2007-07-24 | 2009-01-29 | The Regents Of The University Of California | Microfabricated dropley generator |
| WO2009033128A2 (en) * | 2007-09-07 | 2009-03-12 | Biogenex Laboraties Inc | Sample processing system |
| WO2009108260A2 (en) | 2008-01-22 | 2009-09-03 | Microchip Biotechnologies, Inc. | Universal sample preparation system and use in an integrated analysis system |
| DE102008011972B4 (de) * | 2008-02-29 | 2010-05-12 | Bayer Technology Services Gmbh | Vorrichtung zur selbstjustierenden Montage und Halterung von Mikrokanalplatten in Mikrosystemen |
| DE102008018982A1 (de) * | 2008-04-14 | 2009-11-05 | Merz, Hartmut, Prof. Dr. med. | Automatische Vorrichtung zur Durchführung von Nachweisreaktionen und Verfahren zur Dosierung von Reagenzien auf Objektträgern |
| WO2009144621A1 (en) * | 2008-05-27 | 2009-12-03 | Koninklijke Philips Electronics N. V. | Biochip for fractionating and detecting analytes |
| US8870632B2 (en) * | 2008-09-10 | 2014-10-28 | Laitram, L.L.C. | Apparatus and method for cleaning peeling machines |
| CN102224410B (zh) * | 2008-09-24 | 2017-02-08 | 施特劳斯控股公司 | 用于测试分析物的成像分析仪 |
| EP2204686B9 (en) | 2008-12-30 | 2012-11-14 | Cellavision AB | Analyser for optical analysis of a biological specimen |
| CN102341691A (zh) | 2008-12-31 | 2012-02-01 | 尹特根埃克斯有限公司 | 具有微流体芯片的仪器 |
| DK2208780T3 (en) | 2009-01-20 | 2018-02-05 | Lonza Cologne Gmbh | Method and apparatus for electrically treating multiple containers |
| WO2010132834A1 (en) * | 2009-05-14 | 2010-11-18 | Icubate, Inc. | Apparatus for performing amplicon rescue multiplex pcr |
| WO2010132885A2 (en) | 2009-05-15 | 2010-11-18 | Gen-Probe Incorporated | Method and apparatus for effecting transfer of reaction receptacles in an instrument for multi-step analytical procedures |
| CN102459565A (zh) | 2009-06-02 | 2012-05-16 | 尹特根埃克斯有限公司 | 具有隔膜阀的流控设备 |
| WO2010141921A1 (en) | 2009-06-05 | 2010-12-09 | Integenx Inc. | Universal sample preparation system and use in an integrated analysis system |
| US8584703B2 (en) | 2009-12-01 | 2013-11-19 | Integenx Inc. | Device with diaphragm valve |
| ES2367615B1 (es) * | 2009-12-15 | 2013-01-22 | Consejo Superior De Investigaciones Científicas (Csic) | Sistema y procedimiento multianalítico basado en mediciones impedimétricas. |
| WO2011140079A1 (en) * | 2010-05-03 | 2011-11-10 | Integra Biosciences Corp. (Formerly Viaflo Corporation) | Unintended motion control for manually directed multi-channel electronic pipettor |
| US8512538B2 (en) | 2010-05-28 | 2013-08-20 | Integenx Inc. | Capillary electrophoresis device |
| EP2606154B1 (en) | 2010-08-20 | 2019-09-25 | Integenx Inc. | Integrated analysis system |
| US8763642B2 (en) | 2010-08-20 | 2014-07-01 | Integenx Inc. | Microfluidic devices with mechanically-sealed diaphragm valves |
| US20120045846A1 (en) * | 2010-08-23 | 2012-02-23 | Avia Biosystems, Llc | SYSTEM AND METHOD FOR pH FORMULATIONS |
| WO2012040098A2 (en) | 2010-09-21 | 2012-03-29 | The University Of North Carolina At Chapel Hill | Methods, systems and devices for forming nanochannels |
| WO2012040333A1 (en) * | 2010-09-23 | 2012-03-29 | Porex Corporation | Filtered adapter for pipettors |
| CN107144622A (zh) * | 2011-06-16 | 2017-09-08 | 不列颠哥伦比亚癌症分社 | 核酸的自动化尺寸选择 |
| US11053535B2 (en) | 2011-09-12 | 2021-07-06 | The University Of North Carolina At Chapel Hill | Devices with a fluid transport nanochannel intersected by a fluid sensing nanochannel and related methods |
| US10865440B2 (en) | 2011-10-21 | 2020-12-15 | IntegenX, Inc. | Sample preparation, processing and analysis systems |
| US20150136604A1 (en) | 2011-10-21 | 2015-05-21 | Integenx Inc. | Sample preparation, processing and analysis systems |
| EP2776550B1 (en) | 2011-11-07 | 2018-01-10 | Rapid Micro Biosystems, Inc. | Cassette for sterility testing |
| EP3517971A1 (en) | 2011-11-11 | 2019-07-31 | Icubate, Inc. | Systems and methods for performing amplicon rescue multiplex polymerase chain reaction (pcr) |
| EP2793697A4 (en) * | 2011-12-21 | 2015-08-19 | Catherine M Shachaf | SYSTEM FOR IMAGING LESIONS ALIGNING FABRIC SURFACES |
| WO2013119765A1 (en) * | 2012-02-10 | 2013-08-15 | The University Of North Carolina At Chapel Hill | Devices with fluidic nanofunnels, associated methods, fabrication and analysis systems |
| CA3171698A1 (en) | 2012-04-16 | 2013-10-24 | Rapid Micro Biosystems, Inc. | Cell culturing device |
| EP2703820B1 (en) * | 2012-08-31 | 2019-08-28 | F. Hoffmann-La Roche AG | Mobile tip waste rack |
| KR20150132125A (ko) | 2013-02-28 | 2015-11-25 | 더 유니버시티 오브 노쓰 캐롤라이나 엣 채플 힐 | 거대분자의 통제된 포획, 고정, 및 전달을 위한 통합된 부품을 가진 나노유체 장치 및 관련 분석 방법 |
| NZ711033A (en) | 2013-03-13 | 2020-03-27 | Univ North Carolina Chapel Hill | Nanofluidic devices for the rapid mapping of whole genomes and related systems and methods of analysis |
| US10234425B2 (en) | 2013-03-15 | 2019-03-19 | Qorvo Us, Inc. | Thin film bulk acoustic resonator with signal enhancement |
| US9835595B2 (en) | 2013-05-23 | 2017-12-05 | Qorvo Us, Inc. | Sensors, methods of making and devices |
| DK2999959T3 (da) * | 2013-05-23 | 2021-10-11 | Qorvo Us Inc | Fluidanordning i to dele |
| AU2014287013B2 (en) | 2013-07-12 | 2020-01-23 | President And Fellows Of Harvard College | Systems and methods for cell culture device interconnection and fluidic device interconnection |
| GB2519110B (en) * | 2013-10-09 | 2018-04-18 | Nokia Technologies Oy | An apparatus and associated methods for analyte detection |
| CN105873681B (zh) | 2013-11-18 | 2019-10-11 | 尹特根埃克斯有限公司 | 用于样本分析的卡盒和仪器 |
| EP3113863B1 (en) * | 2014-02-24 | 2023-08-30 | Yourgene Health Canada Inc. | Electrophoresis system with modular pedestals |
| US10208332B2 (en) | 2014-05-21 | 2019-02-19 | Integenx Inc. | Fluidic cartridge with valve mechanism |
| EP3209410A4 (en) | 2014-10-22 | 2018-05-02 | IntegenX Inc. | Systems and methods for sample preparation, processing and analysis |
| US10471428B2 (en) | 2015-05-11 | 2019-11-12 | The University Of North Carolina At Chapel Hill | Fluidic devices with nanoscale manifolds for molecular transport, related systems and methods of analysis |
| CN106554901B (zh) * | 2015-09-30 | 2019-06-14 | 精专生医股份有限公司 | 自动化萃取核酸的机台及配合其使用的针筒 |
| JP6653547B2 (ja) * | 2015-10-05 | 2020-02-26 | 株式会社タカゾノテクノロジー | 流体観察装置 |
| JP6940890B2 (ja) * | 2015-10-05 | 2021-09-29 | 株式会社タカゾノテクノロジー | 微生物検出装置 |
| JP6641146B2 (ja) * | 2015-10-05 | 2020-02-05 | 株式会社タカゾノテクノロジー | 電圧印加装置 |
| GB201601667D0 (en) * | 2016-01-29 | 2016-03-16 | Ge Healthcare Bio Sciences Ab | Improvements in and relating to liquid fraction collectors |
| US10493453B2 (en) * | 2016-03-08 | 2019-12-03 | David W. Wright | Mechanical actuator system and method of actuation of a diagnostic device therewith |
| WO2018038019A1 (ja) * | 2016-08-22 | 2018-03-01 | ユニバーサル・バイオ・リサーチ株式会社 | 分注用シリンダ、並びに、それを用いた分注装置および分注処理方法 |
| US10564122B1 (en) * | 2016-10-21 | 2020-02-18 | Iowa State University Research Foundation, Inc. | Electrophoretic soil nutrient sensor for agriculture |
| US10864515B2 (en) * | 2016-11-11 | 2020-12-15 | Walid Habbal | Automated pipette manipulation system |
| CA3045249C (en) * | 2016-11-18 | 2023-12-19 | Sm Research Inc. | Biologic sample preparation system and related method |
| WO2019204784A1 (en) | 2018-04-19 | 2019-10-24 | First Light Biosciences, Inc. | Detection of targets |
| US11408855B2 (en) | 2018-07-06 | 2022-08-09 | Qorvo Us, Inc. | Bulk acoustic wave resonator with increased dynamic range |
| ES2911471T3 (es) * | 2018-12-14 | 2022-05-19 | Eppendorf Ag | Aparato automático de laboratorio para el tratamiento automático de muestras de laboratorio |
| US20210162398A1 (en) * | 2019-12-03 | 2021-06-03 | RPI Consulting, LLC | Medical testing device |
| CN113368918B (zh) * | 2021-06-21 | 2022-04-26 | 合肥瀚海星点生物科技有限公司 | 一种基于微流控打印的多通道分液装置与分液方法 |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3650306A (en) * | 1970-09-18 | 1972-03-21 | Cooke Eng Co | Laboratory dispensing apparatus |
| US4554839A (en) * | 1983-10-14 | 1985-11-26 | Cetus Corporation | Multiple trough vessel for automated liquid handling apparatus |
| US4952518A (en) * | 1984-10-01 | 1990-08-28 | Cetus Corporation | Automated assay machine and assay tray |
| US4803050A (en) * | 1985-07-22 | 1989-02-07 | Sequoia-Turner Corporation | Method and apparatus for liquid addition and aspiration in automated immunoassay techniques |
| US5108703A (en) * | 1986-03-26 | 1992-04-28 | Beckman Instruments, Inc. | Automated multi-purpose analytical chemistry processing center and laboratory work station |
| US4938080A (en) * | 1986-04-17 | 1990-07-03 | Helena Laboratories, Inc. | Automatic pipetting apparatus |
| US4835711A (en) * | 1986-05-30 | 1989-05-30 | Zymark Corporation | Quickly reconfigurable robotic system |
| GR871619B (en) * | 1986-10-31 | 1988-03-03 | Genetic Systems Corp | Automated patient sample analysis instrument |
| US4909920A (en) * | 1987-03-16 | 1990-03-20 | Helena Laboratories | Automatic electrophoresis apparatus and method |
| US5011779A (en) * | 1988-01-21 | 1991-04-30 | Long Island Jewish Medical Center | Apparatus for rapid deposition of test samples on an absorbent support |
| US5274240A (en) | 1990-01-12 | 1993-12-28 | The Regents Of The University Of California | Capillary array confocal fluorescence scanner and method |
| SE470347B (sv) | 1990-05-10 | 1994-01-31 | Pharmacia Lkb Biotech | Mikrostruktur för vätskeflödessystem och förfarande för tillverkning av ett sådant system |
| US5587128A (en) * | 1992-05-01 | 1996-12-24 | The Trustees Of The University Of Pennsylvania | Mesoscale polynucleotide amplification devices |
| WO1994008759A1 (en) * | 1992-10-16 | 1994-04-28 | Thomas Jefferson University | Method and apparatus for robotically performing sanger dideoxynucleotide dna sequencing reactions |
| US5432085A (en) * | 1992-11-10 | 1995-07-11 | Warren; Richard J. | Cell feeder/harvester assembly |
| US5460709A (en) | 1993-06-21 | 1995-10-24 | Helena Laboratories Corporation | Automatic electrophoresis method and apparatus |
| US6001229A (en) * | 1994-08-01 | 1999-12-14 | Lockheed Martin Energy Systems, Inc. | Apparatus and method for performing microfluidic manipulations for chemical analysis |
| US5571410A (en) | 1994-10-19 | 1996-11-05 | Hewlett Packard Company | Fully integrated miniaturized planar liquid sample handling and analysis device |
| US5500071A (en) | 1994-10-19 | 1996-03-19 | Hewlett-Packard Company | Miniaturized planar columns in novel support media for liquid phase analysis |
| US5585069A (en) | 1994-11-10 | 1996-12-17 | David Sarnoff Research Center, Inc. | Partitioned microelectronic and fluidic device array for clinical diagnostics and chemical synthesis |
| DE69530072T2 (de) | 1994-12-08 | 2004-03-04 | Molecular Dynamics, Sunnyvale | System zur fluoreszenzabbildung unter verwendung eines objektivs mit makroabtastung |
| US5497670A (en) * | 1995-03-31 | 1996-03-12 | Carl; Richard A. | Liquid dispensing apparatus including means for loading pipette tips onto liquid dispensing cylinders and maintaining the loading force during the apparatus operation cycle |
| US5534123A (en) | 1995-07-10 | 1996-07-09 | Molecular Dynamics | Denaturing separation matrix having hydroxyethyl cellulose for nucleic acid electrophoresis |
| US5872010A (en) * | 1995-07-21 | 1999-02-16 | Northeastern University | Microscale fluid handling system |
| US5716825A (en) * | 1995-11-01 | 1998-02-10 | Hewlett Packard Company | Integrated nucleic acid analysis system for MALDI-TOF MS |
| US5906723A (en) * | 1996-08-26 | 1999-05-25 | The Regents Of The University Of California | Electrochemical detector integrated on microfabricated capillary electrophoresis chips |
| US5885430A (en) * | 1996-10-04 | 1999-03-23 | Spectrumedix Corporation | Capillary tube holder for an electrophoretic apparatus |
| JP3661320B2 (ja) * | 1996-11-19 | 2005-06-15 | 株式会社島津製作所 | マイクロチップ電気泳動装置 |
| US5772966A (en) * | 1997-01-24 | 1998-06-30 | Maracas; George N. | Assay dispensing apparatus |
| US5851370A (en) * | 1997-01-24 | 1998-12-22 | Motorola Corporation | Automated electrophoresis system and method |
| US5890745A (en) * | 1997-01-29 | 1999-04-06 | The Board Of Trustees Of The Leland Stanford Junior University | Micromachined fluidic coupler |
| JP3736007B2 (ja) * | 1997-03-03 | 2006-01-18 | 株式会社島津製作所 | マイクロチップ電気泳動装置 |
| WO1999014368A2 (en) * | 1997-09-15 | 1999-03-25 | Whitehead Institute For Biomedical Research | Methods and apparatus for processing a sample of biomolecular analyte using a microfabricated device |
| US6231813B1 (en) * | 1997-09-16 | 2001-05-15 | Invitrogen Corporation | Gel loading adapter |
| US6143152A (en) * | 1997-11-07 | 2000-11-07 | The Regents Of The University Of California | Microfabricated capillary array electrophoresis device and method |
| US6100535A (en) * | 1998-01-29 | 2000-08-08 | The Regents Of The University Of California | Rotary confocal scanner for detection of capillary arrays |
| US6132582A (en) * | 1998-09-14 | 2000-10-17 | The Perkin-Elmer Corporation | Sample handling system for a multi-channel capillary electrophoresis device |
-
1998
- 1998-07-02 US US09/109,676 patent/US6627446B1/en not_active Expired - Fee Related
-
1999
- 1999-03-23 EP EP09153579A patent/EP2056113A3/en not_active Withdrawn
- 1999-03-23 JP JP2000558383A patent/JP4260369B2/ja not_active Expired - Fee Related
- 1999-03-23 EP EP99914994A patent/EP1092146A4/en not_active Withdrawn
- 1999-03-23 WO PCT/US1999/006359 patent/WO2000002038A1/en active Application Filing
-
2000
- 2000-04-20 US US09/556,897 patent/US6764648B1/en not_active Expired - Lifetime
-
2004
- 2004-07-15 US US10/891,563 patent/US20040262162A1/en not_active Abandoned
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210133711A (ko) * | 2020-04-29 | 2021-11-08 | 경희대학교 산학협력단 | 적어도 하나의 미세유동구조물을 포함하는 미세 유동 장치 및 이에 공급된 시료의 분석방법 |
| KR20210133712A (ko) * | 2020-04-29 | 2021-11-08 | 경희대학교 산학협력단 | 적어도 하나의 미세유동구조물을 포함하는 미세 유동 장치 및 이에 공급된 시료의 분석방법 |
| KR20210133713A (ko) * | 2020-04-29 | 2021-11-08 | 경희대학교 산학협력단 | 미세유동장치 및 이를 포함하는 시료 분석 장치 |
| KR102419669B1 (ko) * | 2020-04-29 | 2022-07-08 | 경희대학교 산학협력단 | 적어도 하나의 미세유동구조물을 포함하는 미세 유동 장치 및 이에 공급된 시료의 분석방법 |
| KR102419672B1 (ko) * | 2020-04-29 | 2022-07-11 | 경희대학교 산학협력단 | 적어도 하나의 미세유동구조물을 포함하는 미세 유동 장치 및 이에 공급된 시료의 분석방법 |
| KR102469321B1 (ko) * | 2020-04-29 | 2022-11-18 | 경희대학교 산학협력단 | 미세유동장치 및 이를 포함하는 시료 분석 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002519695A (ja) | 2002-07-02 |
| EP1092146A4 (en) | 2006-08-02 |
| US6627446B1 (en) | 2003-09-30 |
| US6764648B1 (en) | 2004-07-20 |
| EP2056113A3 (en) | 2010-05-26 |
| US20040262162A1 (en) | 2004-12-30 |
| EP1092146A1 (en) | 2001-04-18 |
| EP2056113A2 (en) | 2009-05-06 |
| WO2000002038A1 (en) | 2000-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4260369B2 (ja) | 自動制御マイクロチャネル生体分析機器 | |
| EP1344050B1 (en) | Apparatus and method for filling and cleaning channels and inlet ports in microchips used for biological analysis | |
| EP1114316B1 (en) | Sample handling system for a multi-channel capillary electrophoresis device | |
| EP0815440B1 (en) | Capillary electrophoresis apparatus and method | |
| US6991713B2 (en) | Methods and apparatus for processing a sample of biomolecular analyte using a microfabricated device | |
| US7316801B2 (en) | High throughput microfluidic systems and methods | |
| US6428752B1 (en) | Cleaning deposit devices that form microarrays and the like | |
| JP2000346842A (ja) | 微粒子を用いたプローブアレーの作製方法及び装置 | |
| JP3828350B2 (ja) | キャピラリ電気泳動装置およびキャピラリアレイアッセンブリ | |
| WO2003052821A1 (en) | Microfluidic analytical apparatus | |
| AU2002318773B2 (en) | Sample Handling System for a Multi-Channel Capillary Electrophoresis device | |
| JP2005351905A (ja) | キャピラリ電気泳動装置およびキャピラリアレイアッセンブリ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20041124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20041129 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20041129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090204 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120220 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130220 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130220 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140220 Year of fee payment: 5 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |