JP4208753B2 - Control device for vibration type drive device, control method for vibration type drive device, control program for vibration type drive device - Google Patents
Control device for vibration type drive device, control method for vibration type drive device, control program for vibration type drive device Download PDFInfo
- Publication number
- JP4208753B2 JP4208753B2 JP2004081135A JP2004081135A JP4208753B2 JP 4208753 B2 JP4208753 B2 JP 4208753B2 JP 2004081135 A JP2004081135 A JP 2004081135A JP 2004081135 A JP2004081135 A JP 2004081135A JP 4208753 B2 JP4208753 B2 JP 4208753B2
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- frequency
- drive
- drive signals
- conversion element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















































Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
本発明は、電気−機械エネルギ変換素子により振動体に進行性振動を形成し、該振動体と接触体とを相対移動させるいわゆる振動型駆動装置の制御に関する。 The present invention relates to control of a so-called vibration type driving device that forms a progressive vibration in a vibrating body by an electro-mechanical energy conversion element and moves the vibrating body and a contact body relative to each other.
電気−機械エネルギ変換素子により弾性体に振動を形成し、移動体(接触体)を駆動する振動型駆動装置は、低速度で大きな駆動力が取り出せるアクチュエータとして用いられている。 2. Description of the Related Art A vibration type driving device that generates vibration in an elastic body by an electro-mechanical energy conversion element and drives a moving body (contact body) is used as an actuator that can extract a large driving force at a low speed.
特に、特許文献1にて提案されている進行波型の振動型駆動装置は、弾性体に進行性の振動波を励起し、これに加圧接触した移動体を連続的に駆動することにより、より滑らかな駆動が可能である。
In particular, the traveling wave type vibration type driving device proposed in
この特許文献1に記載の振動型駆動装置では、振動体が円環形状の弾性体を用いて構成され、弾性体の軸方向一方の側には、くし歯状の突起群が形成されている。これら突起群の上面には、摩擦材料が接着されている。また、弾性体の軸方向他方の側には、電気−機械エネルギ変換素子として円環状の圧電素子が接着されており、圧電素子にはパターン電極が形成されている。
In the vibration type driving device described in
パターン電極は、振動体の円環部に励起する振動モードの次数に対応して、次数の四倍の数に等分割されており、それぞれの電極には、順に時間位相が90°ずつ異なる略サイン波形状の交流電圧が供給される。励起する振動モードの固有振動数付近の周波数で交流電圧を供給すると、圧電素子の伸縮により弾性体に加わる曲げモーメントによって弾性体が共振し、90°ずつ異なる交流電圧に対してそれぞれ励起される振動(モード)は同形状で、かつ位相が異なり、その合成によって進行性振動波(進行波)が形成される。 The pattern electrode is equally divided into four times the order corresponding to the order of the vibration mode excited in the annular portion of the vibrating body, and each electrode has an approximately 90 ° temporal phase difference in order. A sinusoidal AC voltage is supplied. When an AC voltage is supplied at a frequency near the natural frequency of the vibration mode to be excited, the elastic body resonates due to the bending moment applied to the elastic body due to the expansion and contraction of the piezoelectric element, and vibrations that are excited with respect to the AC voltages that differ by 90 °. The (mode) has the same shape and a different phase, and a progressive vibration wave (traveling wave) is formed by the synthesis.
図44に、振動型駆動装置の駆動を行うための駆動回路を示す。この駆動回路は、特許文献2にて記載された駆動回路であり、22〜29のMOSFETで構成したスイッチング回路を、不図示のパルス発生回路で発生したパルスでオン・オフ制御し、センタータップ付きのトランス30,31に交流電圧を発生させ、2次側に接続されたA(+)、B(+)、A(−)、B(−)相に対応する端子32〜35に順次90°位相のずれた交流電圧を供給する。
FIG. 44 shows a drive circuit for driving the vibration type drive device. This drive circuit is a drive circuit described in
一方、異なる振動(モード)を重ね合せた、いわゆる定在波駆動型のモータは、例えば、特許文献3にて提案されているような縦振動とねじり振動を合成するものがある。この例では、縦振動とねじり振動を90°の位相差をもって励起することにより、縦振動を振動体の移動体に対する離間および接触を行わせる振動として、ねじり振動を移動体を搬送する振動として用いている。
On the other hand, a so-called standing wave drive type motor in which different vibrations (modes) are superimposed includes, for example, one that synthesizes longitudinal vibration and torsional vibration as proposed in
このような異なる振動モードの重ね合せにより駆動する振動型駆動装置は、異なる振動方向のモードを同じ周波数で駆動するために、異なる振動方向のモードに対して共振周波数を略一致させることが必要であるが、同形状で加工しても、振動体の材料の異方性などから共振周波数を一致させることが難しく、周波数の調整工程が必要となる。 Such a vibration type driving device driven by superposition of different vibration modes needs to substantially match the resonance frequency with the modes of different vibration directions in order to drive the modes of different vibration directions at the same frequency. However, even if the same shape is processed, it is difficult to match the resonance frequency due to the anisotropy of the material of the vibrating body, and a frequency adjustment step is required.
これに対し、前述した同形状の振動(モード)の重ね合せによるいわゆる進行波型の振動型駆動装置は、振動モードが同じ変形の分布を持つモードであるために、振動方向による共振周波数の変化が出にくく、2つのモードの共振周波数を一致させるためにほとんど調整を必要としないという特徴がある。
しかしながら、進行波型の振動型駆動装置では、同形状の振動(モード)の重ね合せであるがゆえに、以下のような問題がある。 However, the traveling wave type vibration type driving device has the following problems because it is a superposition of vibrations (modes) of the same shape.
図45A,図45Bには、振動体(弾性体)と移動体との接触・駆動状態を模式的に示している。 45A and 45B schematically show the contact / drive state between the vibrating body (elastic body) and the moving body.
図45A,図45Bには、振動体101の振動変位と、移動体106の応答変位を示しており、振動体上の突起形状や摩擦材料は省略している。図中に実線矢印で示したのは振動体101の駆動振動であり、この駆動振動によって移動体106が白抜き矢印で示した方向に駆動される。図45Aは振動振幅が大きい高速駆動時を、図45Bは、図45Aの場合よりも振動振幅が小さい低速駆動時の振動状態を示している。図45Bのように、振動振幅を小さくすることによって各位置での送り速度を下げ、速度を落としている(速度は白抜き矢印の長さで表している)。
45A and 45B show the vibration displacement of the
移動体106は、振動体101の振動形状に対して送り速度が大きい、すなわち変位が大きい部分に一部が接触するようにその曲げ剛性と応答性をもたせている。しかし、速度を下げるに従って、移動体106との接触領域が増加し、最終的には図45Bに示すようにほとんど全面で接触した状態で低速駆動されることになる。
The moving
このような接触状態になると、接触面のほぼ全域に、部分的な振動体と移動体との速度差による滑り摩擦が働くために効率が低下する。さらに、接触面で生じた摩耗粉が外部に排出されにくくなり、砥粒として働くため、移動体および振動体の摩耗量が増加する。 In such a contact state, efficiency is lowered because sliding friction due to a partial speed difference between the vibrating body and the moving body acts on almost the entire contact surface. Furthermore, since the abrasion powder generated on the contact surface is difficult to be discharged to the outside and works as abrasive grains, the wear amount of the moving body and the vibrating body increases.
ある程度の振動振幅を維持しながら速度を下げる手法としては、主として振動の応答性を高めるための手段としてではあるが、例えば特許文献4にて提案されているように、停止時に定在波に切り換える方法や、A相、B相間の位相差を90°から小さくして定在波に変化させる方法、あるいは、A相、B相の一方の振動振幅を小さくする方法がある。 As a method for reducing the speed while maintaining a certain vibration amplitude, the method is mainly used as a means for improving the response of vibration. For example, as proposed in Patent Document 4, switching to a standing wave at the time of stoppage is performed. There are a method, a method of changing the phase difference between the A phase and the B phase from 90 ° to change to a standing wave, or a method of reducing the vibration amplitude of one of the A phase and the B phase.
しかしながら、このような方法では、振動体と移動体との接触面に悪影響を及ぼす。 However, such a method adversely affects the contact surface between the vibrating body and the moving body.
例えば、円環型の振動型駆動装置の場合、振動体に複数の曲げ変形を生ずるような振動モードを位置的位相を90°ずらして重ね合せて用いる。 For example, in the case of an annular type vibration type driving device, vibration modes that cause a plurality of bending deformations in a vibrating body are used with the positional phase shifted by 90 ° and overlapped.
図46は、振動体の振動を模式的に示した展開図であり、圧電素子102のA(+),B(+),A(−),B(−)にそれぞれ時間位相が90°異なる駆動電圧を供給した場合の振動の様子を示している。振動体101の各部に示した楕円‘a’〜‘g’は、振動体の各位置に生じる楕円運動を示している。各楕円中に示した矢印は、楕円運動を構成するA,B相(実線矢印がA相を、点線矢印がB相を示す)の各振動成分である。
FIG. 46 is a developed view schematically showing the vibration of the vibrating body, in which the time phase differs by 90 ° for each of A (+), B (+), A (−), and B (−) of the
楕円運動を構成するA,Bの各相の振動成分は、位置によって方向が異なっている。ここで、A相の振動振幅を小さくして定在波成分を生じさせると、場所によって縦振幅が減少する箇所と横振幅が減少する箇所とが分布して生じることにより、摩擦状態の不均一を生ずる。この不均一は、摩擦面の摩耗速度に差を生じさせるため、摩擦面の平面度の劣化を生じ、性能の低下の原因になる。 The direction of the vibration component of each phase of A and B constituting the elliptical motion differs depending on the position. Here, when the standing wave component is generated by reducing the vibration amplitude of the A phase, the location where the longitudinal amplitude decreases and the location where the lateral amplitude decreases are distributed depending on the location, resulting in uneven frictional state. Is produced. This non-uniformity causes a difference in the wear speed of the friction surface, so that the flatness of the friction surface is degraded and the performance is degraded.
さらに、進行波振動の極大部、すなわち駆動力が大きい箇所が常に同じ位置に存在するため、移動体と振動体との面圧むらが生じたり、移動体の接触部の平面の凹凸によって移動体の回転と同期して回転むらが生じたりして、回転精度が低下するおそれがある。 Furthermore, since the maximum part of the traveling wave vibration, that is, the portion where the driving force is large is always present at the same position, unevenness of the surface pressure between the moving body and the vibrating body occurs, or the moving body is caused by unevenness in the plane of the contact portion of the moving body Rotation unevenness may occur in synchronization with the rotation of the rotation, which may reduce the rotation accuracy.
本発明は、低速での駆動状態を長期間にわたって続けても、出力性能を維持できるようにした振動型駆動装置の制御装置および制御方法を提供することを目的としている。 SUMMARY OF THE INVENTION An object of the present invention is to provide a control device and a control method for a vibration type drive device that can maintain output performance even if the drive state at low speed is continued for a long period of time.
上記の目的を達成するために、本発明は、弾性体および電気−機械エネルギ変換素子を有する振動体と、前記振動体に接触する接触体とを有し、電気−機械エネルギ変換素子に複数の駆動信号を供給して、振動体に進行性振動を励起し、振動体と接触体とを相対移動させる振動型駆動装置の制御装置であって、振動体に第1進行性振動を励起するため、位相の異なる複数の駆動信号を電気−機械エネルギ変換素子に供給する第1駆動回路と、振動体に第1進行性振動とは別の第2進行性振動を励起するため、位相の異なる複数の駆動信号を電気−機械エネルギ変換素子に供給する第2駆動回路と、第1駆動回路が供給する駆動信号の周波数及び第2駆動回路が供給する駆動信号の周波数を設定する周波数制御手段とを有する。そして、周波数回路は、第1駆動回路と第2駆動回路が供給する駆動信号に対して異なる周波数を設定し、前記第1進行性振動と前記第2進行性振動を同時に励起させることを特徴とする。 In order to achieve the above object, the present invention includes a vibrating body having an elastic body and an electro-mechanical energy conversion element, and a contact body in contact with the vibrating body. A control device for a vibration-type drive device that supplies a drive signal to excite progressive vibration in the vibrating body and moves the vibrating body and the contact body relative to each other, and excites the first progressive vibration in the vibrating body. A first drive circuit that supplies a plurality of drive signals with different phases to the electromechanical energy conversion element, and a second progressive vibration different from the first progressive vibration is excited in the vibrating body. A second drive circuit for supplying the drive signal to the electromechanical energy conversion element, and a frequency control means for setting the frequency of the drive signal supplied by the first drive circuit and the frequency of the drive signal supplied by the second drive circuit. Have. The frequency circuit sets different frequencies for the drive signals supplied from the first drive circuit and the second drive circuit, and simultaneously excites the first progressive vibration and the second progressive vibration. To do.
また、本発明は、弾性体および電気−機械エネルギ変換素子を有する振動体と、振動体に接触する接触体とを有し、電気−機械エネルギ変換素子に複数の駆動信号を供給して、振動体に進行性振動を励起し、振動体と接触体とを相対移動させる振動型駆動装置の制御装置であって、振動体に進行性振動を励起するため、位相の異なる複数の駆動信号を電気−機械エネルギ変換素子に供給する駆動回路と、駆動回路が供給する前記複数の駆動信号の周波数を制御する周波数制御手段とを有し、周波数制御手段は、駆動回路に複数の駆動信号を第1の周波数にて電気−機械エネルギ変換素子に供給させることで、弾性体に第1の進行性振動を励起し、周波数制御手段は、駆動回路が複数の駆動信号を第1の周波数にて電気−機械エネルギ変換素子に供給するのを停止させ、第1の進行性振動による減衰振動が生じている間に、複数の駆動信号を第2の周波数にて電気−機械エネルギ変換素子に供給させることで、弾性体に第2の進行性振動を減衰振動に重畳させて励起することを特徴とする。 The present invention also includes a vibrating body having an elastic body and an electro-mechanical energy conversion element, and a contact body in contact with the vibrating body, and supplies a plurality of drive signals to the electro-mechanical energy conversion element to vibrate. This is a control device for a vibration type drive device that excites progressive vibration in the body and relatively moves the vibration body and the contact body, and in order to excite progressive vibration in the vibration body, a plurality of drive signals having different phases are electrically A drive circuit that supplies the mechanical energy conversion element and a frequency control unit that controls the frequencies of the plurality of drive signals supplied by the drive circuit, the frequency control unit receiving a plurality of drive signals in the drive circuit; Is supplied to the electromechanical energy conversion element at a frequency of 1 to excite the first progressive vibration in the elastic body, and the frequency control means causes the drive circuit to generate a plurality of drive signals at the first frequency. Mechanical energy conversion element The supply is stopped, and a plurality of drive signals are supplied to the electromechanical energy conversion element at the second frequency while the damped vibration is generated by the first progressive vibration. The present invention is characterized in that two progressive vibrations are excited by being superimposed on a damped vibration .
また、本発明は、弾性体および電気−機械エネルギ変換素子を有する振動体と、振動体に接触する接触体とを有し、電気−機械エネルギ変換素子に複数の駆動信号を供給して、振動体に進行性振動を励起し、振動体と接触体とを相対移動させる振動型駆動装置の制御方法であって、振動体に第1進行性振動を励起するため、電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数を設定する工程と、振動体に第1進行性振動とは別の第2進行性振動を励起するため、電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数とは異なる第2の周波数を設定する工程と、位相の異なる複数の第1の周波数の駆動信号を電気−機械エネルギ変換素子に供給するとともに、位相の異なる複数の第2の周波数の駆動信号を電気−機械エネルギ変換素子に供給し、第1進行性振動と第2進行性振動を同時に励起させる工程とを有することを特徴とする。 The present invention also includes a vibrating body having an elastic body and an electro-mechanical energy conversion element, and a contact body in contact with the vibrating body, and supplies a plurality of drive signals to the electro-mechanical energy conversion element to vibrate. A method of controlling a vibration type driving device that excites a progressive vibration in a body and moves a vibrating body and a contact body relative to each other, and the first progressive vibration is excited in the vibration body. The step of setting the first frequency as the frequency of the plurality of drive signals to be supplied, and the second progressive vibration different from the first progressive vibration in the vibrator are supplied to the electro-mechanical energy conversion element. A step of setting a second frequency different from the first frequency as the frequency of the plurality of drive signals, and supplying a plurality of drive signals of the first frequency having different phases to the electromechanical energy conversion element, Different multiple Electrical drive signals of 2 frequencies - is supplied to the energy transducer, characterized by a step of exciting the first traveling vibration and a second traveling vibration simultaneously.
また、本発明は、弾性体および電気−機械エネルギ変換素子を有する振動体と、振動体に接触する接触体とを有し、電気−機械エネルギ変換素子に複数の駆動信号を供給して、振動体に進行性振動を励起し、振動体と接触体とを相対移動させる振動型駆動装置の制御方法であって、振動体に第1進行性振動を励起するため、電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数を設定する工程と、振動体に第1進行性振動とは別の第2進行性振動を励起するため、電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数とは異なる第2の周波数を設定する工程と、複数の駆動信号を第1の周波数にて電気−機械エネルギ変換素子に供給することで、弾性体に第1の進行性振動を励起する工程と、複数の駆動信号を第1の周波数にて電気−機械エネルギ変換素子に供給するのを停止し、第1の進行性振動による減衰振動が生じている間に、複数の駆動信号を第2の周波数にて電気−機械エネルギ変換素子に供給することで、弾性体に第2の進行性振動を減衰振動に重畳させて励起する工程とを有することを特徴とする。 The present invention also includes a vibrating body having an elastic body and an electro-mechanical energy conversion element, and a contact body in contact with the vibrating body, and supplies a plurality of drive signals to the electro-mechanical energy conversion element to vibrate. A method of controlling a vibration type driving device that excites a progressive vibration in a body and moves a vibrating body and a contact body relative to each other, and the first progressive vibration is excited in the vibration body. The step of setting the first frequency as the frequency of the plurality of drive signals to be supplied, and the second progressive vibration different from the first progressive vibration in the vibrator are supplied to the electro-mechanical energy conversion element. By setting a second frequency different from the first frequency as the frequency of the plurality of drive signals, and supplying the plurality of drive signals to the electromechanical energy conversion element at the first frequency, the elastic body Excites the first progressive vibration And stopping supplying the plurality of drive signals to the electromechanical energy conversion element at the first frequency, and generating the plurality of drive signals while the damped vibration is generated by the first progressive vibration. Supplying the electro-mechanical energy conversion element at a second frequency to excite the elastic body by superimposing the second progressive vibration on the damped vibration .
なお、上記各制御方法をコンピュータに実行させるための制御プログラムも本発明に含まれる。Note that a control program for causing a computer to execute the above control methods is also included in the present invention.
本発明によれば、振動型駆動装置を低速で駆動する場合において、速度むらの少ない安定した駆動を行うことができるとともに、長期にわたって振動型駆動装置の安定した性能を維持することができる。 According to the present invention, when the vibration type driving device is driven at a low speed, it is possible to perform stable driving with less speed unevenness and to maintain stable performance of the vibration type driving device over a long period of time.
以下、本発明の実施例について図面を参照しながら説明する。 Embodiments of the present invention will be described below with reference to the drawings.
図12には、本発明の実施例1である進行波型の振動型駆動装置の構成を示す。この振動型駆動装置は、ハウジング10にビスなどで固定された振動体1と、振動体1に摩擦材5を介して摩擦接触する移動体6と、玉軸受け15によってハウジング10に回転自在に支持された出力軸11と、移動体6を振動体1に加圧接触させるばね力を発生するとともに、移動体6の回転を出力軸11に伝達する加圧ばね8とにより構成されている。出力軸11には、不図示のギヤ等を介して、該振動型駆動装置を駆動源とする各種装置、機器等の作動装置21の駆動機構20が接続されており、駆動機構20は出力軸11からの出力を受けて作動する。
FIG. 12 shows the configuration of a traveling wave type vibration type driving apparatus that is
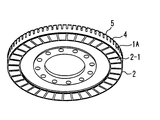
図13には、上記振動型駆動装置に用いられている振動体1の裏面側から見た斜視図を示している。振動体1は、金属材料の切削加工あるいは粉末焼結などの型成形によって円環状に製作された弾性体1Aと、この弾性体1Aの裏面に貼り付けられた電気−機械エネルギ変換素子としての円環状の圧電素子2とから構成されている。電気−機械エネルギ変換素子にはこの他に電歪素子、磁歪素子等がある。
In FIG. 13, the perspective view seen from the back surface side of the vibrating
弾性体1Aの軸方向一方(表面)の側には、複数の放射状の溝が軸方向に延びるよう形成されることにより、くし歯状の複数の突起4が形成されている。該複数の突起4の上面には摩擦材5が接着されている。摩擦材としては、PTFEを主体とする複合樹脂材料や、用途に合わせて表面処理を施した金属材料や、アルミナセラミックが用いられる。
A plurality of comb-like projections 4 are formed on one axial surface (front surface) side of the
弾性体1Aの軸方向他方の側(くし歯状突起が形成されていない側)の面には、圧電素子2が接着されており、この圧電素子2にはパターン電極2−1が蒸着又は印刷によって形成されている。
The
パターン電極2−1は、振動体1の弾性体1Aに励起する振動(以下、振動モードともいう)の次数に対応して、次数の4倍の数に等分割されており、それぞれの電極には、順に時間位相が90°ずつ異なる略サイン波形状の交流電圧が供給される。励起する振動モードの固有振動数付近の周波数で交流電圧を供給すると、圧電素子2の伸縮により弾性体1Aに曲げモーメントが加わり、これによって弾性体1Aが共振振動する。90°ずつ異なる交流電圧に対してそれぞれ励起される振動は、その合成によって進行波(進行性振動波)となる。
The pattern electrode 2-1 is equally divided into four times the order corresponding to the order of vibration (hereinafter also referred to as vibration mode) excited on the
次に、上記振動型駆動装置の駆動方法(制御方法)について説明する。図1には、振動体のA相、B相の振動軌跡を示している。また、図2には、パターン電極を介して圧電素子2に供給する駆動信号(入力信号)のパターンを示す。さらに、図3には、駆動信号波形の記述を示す。
Next, a driving method (control method) of the vibration type driving device will be described. FIG. 1 shows vibration trajectories of the A phase and the B phase of the vibrating body. FIG. 2 shows a pattern of a drive signal (input signal) supplied to the
図1に示した振動軌跡は、A相、B相の振動変位を横軸、縦軸として示したものであり、図2に示す駆動信号によって振動体1に図1に示すような振動が励起される。
The vibration trajectory shown in FIG. 1 shows the vibration displacement of the A phase and the B phase as the horizontal axis and the vertical axis, and the vibration as shown in FIG. 1 is excited in the
ここで、A(+),B(+),A(−),B(−)の圧電素子2に駆動信号を供給する4相駆動の場合は、A(+)とA(−)およびB(+)とB(−)は逆相になるため、省略してA相およびB相として示している(以下、他の実施例でも同様である)。
Here, in the case of four-phase driving for supplying a driving signal to the
図2に示した駆動信号(A相駆動電圧およびB相駆動電圧)は、図3に示した駆動角速度ωを持つ駆動信号を基本波(振幅一定の駆動電圧V)として振幅変調(定在波振幅a)と位相変調(転回角α)を同時にかけたものであり、その結果として図1に示すように進行波に定在波成分を生成し、さらにA,B平面上でその定在波成分が回転するような進行波を形成している。 The drive signals (A-phase drive voltage and B-phase drive voltage) shown in FIG. 2 are amplitude-modulated (standing wave) with the drive signal having the drive angular velocity ω shown in FIG. 3 as the fundamental wave (drive voltage V with a constant amplitude). Amplitude a) and phase modulation (turning angle α) are simultaneously applied. As a result, a standing wave component is generated in the traveling wave as shown in FIG. 1, and the standing wave is further generated on the A and B planes. A traveling wave that rotates the component is formed.
次に、この駆動方法の作用を説明する。通常の振動型駆動装置の駆動方法では、位置的位相をπ/2として配置されたA相振動およびB相振動は、振幅を等しくし、時間的位相を互いにπ/2として振動を励起することによって、A,B平面においては図1に破線で示す円軌跡をたどる。このA、B相の振動は、図46に示したように、振動体の各部でその振動方向が異なっている。 Next, the operation of this driving method will be described. In the driving method of a normal vibration type driving device, the A phase vibration and the B phase vibration arranged with a positional phase of π / 2 are equal in amplitude and excited with a temporal phase of π / 2. Thus, the circular trajectory indicated by the broken line in FIG. As shown in FIG. 46, the vibration directions of the A and B phases are different in each part of the vibrating body.
図4Aから図4Dは図1に示した本実施例の振動形態を振動体1の各部の振動をA相、B相の成分に分けて示した模式図であり、時間をおって図4A,図4B,図4Cそして図4Dの振動状態へと変化する。実線矢印がA相の、点線矢印がB相の振動成分である。
4A to 4D are schematic views showing the vibration mode of the present embodiment shown in FIG. 1 by dividing the vibration of each part of the vibrating
図4Aの状態では。A相振幅>B相振幅であるため、A相の腹部での振動が最大となり、次第に楕円振動が回転して、図4Bの状態ではA相の腹部とB相の腹部の中間で振動振幅が最大となる。さらに、図4Cの状態では、B相の腹部での振動振幅が最大となり、同様に図4Dの状態を経て、また当初の図4Aの振動形態に戻る。このように、振幅変調と位相変調とをかけることにより、図1に示したように、A相およびB相振動で構成する定在波成分を回転させるようにしている。 In the state of FIG. 4A. Since the A phase amplitude> the B phase amplitude, the vibration in the abdominal portion of the A phase is maximized, and the elliptical vibration is gradually rotated. In the state of FIG. 4B, the vibration amplitude is intermediate between the abdominal portion of the A phase and the B phase. Maximum. Furthermore, in the state of FIG. 4C, the vibration amplitude in the B-phase abdomen is maximized, and similarly returns to the vibration form of FIG. 4A through the state of FIG. 4D. In this way, by applying amplitude modulation and phase modulation, as shown in FIG. 1, the standing wave component constituted by the A-phase and B-phase vibrations is rotated.
この結果、A相振動とB相振動の合成により形成される進行波の最大変位が増減し、かつその最大変位が極大となる位置が、振動体1上を、該振動体1と移動体6との相対駆動方向に移動することになる。
As a result, the position where the maximum displacement of the traveling wave formed by the synthesis of the A-phase vibration and the B-phase vibration increases and decreases and the maximum displacement becomes maximum is on the vibrating
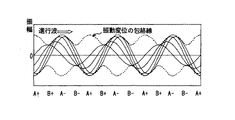
ここで、図15は振動型駆動装置を一定の速度で駆動した際の、A,B各相の振動振幅が等しく、時間的位相を90°とした通常(従来)の進行波における振動変位の動きを表したものである。図中破線で表したのが各位置での進行波の振動変位の最大値を結んだ包絡線であり、振動変位の最大値が等しいことから、直線状の包絡線となっている。つまり、この進行波の最大変位には、増減もなく、極大値が存在しない。 Here, FIG. 15 shows the vibration displacement of a normal (conventional) traveling wave in which the vibration amplitudes of the phases A and B are equal and the temporal phase is 90 ° when the vibration type driving device is driven at a constant speed. It represents a movement. In the figure, the broken line represents an envelope connecting the maximum values of the vibration displacement of the traveling wave at each position. Since the maximum values of the vibration displacement are equal, the envelope is a straight envelope. That is, the maximum displacement of the traveling wave does not increase or decrease and there is no maximum value.
また、図16は振動型駆動装置を一定の速度で駆動した際の、課題の欄で図46を用いて説明した従来の低速駆動方法として、B相の振動振幅を小さくした場合の進行波の振動変位の動きを表したものである。B相に対応した位置において振幅が減少するため、進行波の最大変位を結んだ包絡線は、図の破線で示すように、A相位置を最大(極大)とする、進行波波長の半分のピッチの略正弦波形状になる。さらに、B相の振動振幅を減少させて0とすると、B相に対応する位置の振幅は0となり、A相位置に腹を持つ定在波だけになる。A相の振動振幅を小さくする場合も同様に、A相位置に対応した位置の振幅が小さくなり、B相位置を最大(極大)とする略正弦波上の包絡線となる。 FIG. 16 shows the traveling wave when the vibration amplitude of the B phase is reduced as a conventional low-speed driving method described with reference to FIG. 46 when the vibration type driving device is driven at a constant speed. It represents the movement of vibration displacement. Since the amplitude decreases at the position corresponding to the B phase, the envelope connecting the maximum displacement of the traveling wave is half the traveling wave wavelength, which is the maximum (maximum) of the A phase position, as shown by the broken line in the figure. It has a substantially sine wave shape with a pitch. Further, if the vibration amplitude of the B phase is reduced to 0, the amplitude at the position corresponding to the B phase becomes 0, and only the standing wave having an antinode at the A phase position is obtained. Similarly, when the vibration amplitude of the A phase is reduced, the amplitude of the position corresponding to the A phase position is reduced, resulting in an envelope on a substantially sine wave that maximizes (maximum) the B phase position.
このように、従来の駆動方法では、進行波の振動変位の最大値が増減するが、A相位置またはB相位置という決まった位置でその最大値が極大となるような進行波になる。そして、このように片相の振動振幅を小さくして定在波成分を生じさせると、決まった場所で縦振幅が減少する箇所と横振幅が減少する箇所とが分布して生じる。このため、振動体に移動体を加圧接触させた場合には、接触位置により摩擦状態の不均一を生ずる。この不均一は、摩擦面の摩耗速度に差を生じさせ、摩擦面の平面度の劣化を生じるため、回転むらの増加、適切な接触状態を維持できないことによる異音の発生など、性能の低下の原因になる。 As described above, in the conventional driving method, the maximum value of the vibration displacement of the traveling wave increases or decreases, but the traveling wave is such that the maximum value is maximized at a predetermined position such as the A phase position or the B phase position. Then, when the vibration amplitude of one phase is reduced to generate a standing wave component in this way, the places where the longitudinal amplitude decreases and the places where the transverse amplitude decreases are distributed in a fixed place. For this reason, when the moving body is brought into pressure contact with the vibrating body, the frictional state is uneven depending on the contact position. This non-uniformity causes a difference in the wear speed of the friction surface and deteriorates the flatness of the friction surface, resulting in a decrease in performance such as increased rotation unevenness and generation of abnormal noise due to failure to maintain an appropriate contact state. Cause.
さらに、振動振幅の大きい箇所が常に同じ位置に存在するため、移動体と振動子との面圧分布のむらや、移動体の接触部の平面の凹凸によって、移動体の回転と同期して定常的に回転むらが生じ、回転精度を著しく損なうことになる。 Furthermore, since there are always places with large vibration amplitudes at the same position, the surface pressure distribution between the moving body and the vibrator is uneven, and the unevenness of the plane of the contact portion of the moving body is constantly synchronized with the rotation of the moving body. Rotation unevenness occurs, and the rotational accuracy is significantly impaired.
さらに、A,B相の時間的位相を90°から変化させる場合も、A、B相の中間位置での振幅を増加させることになり、同様の性能低下の原因となる。 Further, when the temporal phases of the A and B phases are changed from 90 °, the amplitude at the intermediate position between the A and B phases is increased, which causes the same performance degradation.
これらに対し、図14には、振動型駆動装置を一定の速度で駆動した際の、本実施例の駆動方法により振動体1に励起される包絡線のみを示している。この図は、進行波の各位置での振動振幅の最大値を結んだ包絡線の動きを表している。従来の駆動方法では、図16に示したように、振幅の最大値を結んだ包絡線の極大部の位置が一定であったのに対し、本実施例では、変調周期で決定される速度で振動変位の包絡線が移動していく。すなわち、本実施例では、進行波の振動変位の最大値(最大変位)が増減し、かつその最大変位が極大となる位置が順次若しくは連続的に移動する。
On the other hand, FIG. 14 shows only the envelope excited by the vibrating
なお、駆動信号の振幅変調、位相変調に振動体1が応答するには、その変調周波数によって生ずる駆動信号の側波帯が振動体1を駆動可能な帯域内に入っていればよい。
In order for the vibrating
変調により生成された定在波成分には、移動体6を駆動する駆動力はなく、移動体6を駆動できる駆動振動成分は、A、B相に含まれる直交成分で与えられる。このため、駆動振動成分は、図4Aから図4D中に破線で示した楕円の成分でしかなく、駆動速度もこの破線の楕円の大きさによって決定される。 The standing wave component generated by the modulation has no driving force for driving the moving body 6, and the driving vibration component capable of driving the moving body 6 is given by the orthogonal components included in the A and B phases. For this reason, the driving vibration component is only an elliptical component indicated by a broken line in FIGS. 4A to 4D, and the driving speed is also determined by the size of the broken elliptical line.
本実施例によれば、駆動振動成分よりも大きな振動を生じさせながら、より低速度での駆動が可能となり、さらに進行波の最大変位が極大となる位置が変調周期にしたがって振動体1上を連続的に移動するため、移動体6との全面接触状態を避けることができ、特定の個所において摩耗が進む現象も避けることができる。
According to the present embodiment, it is possible to drive at a lower speed while generating a vibration larger than the drive vibration component, and the position where the maximum displacement of the traveling wave is maximized on the vibrating
さらに、従来の駆動方法では、移動体の加圧面圧むらが生じたり、接触部の平面形状と振動体上での進行波の極大位置との関係による回転むら、トルクむらが生じたりしたが、本実施例によれば、進行波の極大位置を振動体上を移動させることにより、回転むら、トルクむらを振幅位相の変調周期内において平均化することが可能となり、変調周波数以下の回転むら、トルクむらを大幅に低減することができる。 Furthermore, in the conventional driving method, the pressing surface pressure unevenness of the moving body occurs, or the rotation unevenness and torque unevenness occur due to the relationship between the planar shape of the contact portion and the maximum position of the traveling wave on the vibrating body. According to the present embodiment, it is possible to average the rotation unevenness and the torque unevenness within the modulation period of the amplitude phase by moving the maximum position of the traveling wave on the vibrating body, and the rotation unevenness below the modulation frequency. Torque unevenness can be greatly reduced.
このように本実施例では、A相振動とB相振動とに独立した振幅変調と位相変調を施してA相とB相との合成波である進行波に定在波成分を含ませ、さらにAB平面上での振動形状を回転させることによって、振動体1上に形成した進行波の最大変位の極大位置を順次(連続的に)移動させることができる。したがって、極低速駆動で駆動振動が微小になる条件においても大きな振幅で長期間にわたって安定して駆動することができる。
As described above, in this embodiment, independent amplitude modulation and phase modulation are applied to the A-phase vibration and the B-phase vibration so that the traveling wave, which is a composite wave of the A-phase and the B-phase, includes the standing wave component. By rotating the vibration shape on the AB plane, the maximum position of the maximum displacement of the traveling wave formed on the vibrating
図5には、本発明の実施例2である振動型駆動装置の駆動方法(制御方法)により駆動した場合の振動体1の振動軌跡を示す。本実施例の駆動方法は、実施例1にて説明した振動型駆動装置に適用されるものである。そして、本実施例でも、実施例1と同様に、振動体1上に形成した進行波の最大変位の極大位置を順次移動させることができる。
FIG. 5 shows a vibration locus of the vibrating
図6には、本実施例の駆動信号(入力信号)を示す。図7には、本実施例の駆動振幅を時間軸で示す。 FIG. 6 shows drive signals (input signals) of this embodiment. FIG. 7 shows the drive amplitude of this embodiment on the time axis.
本実施例は、A相およびB相に、独立した振幅変調のみを施したものである。 In this embodiment, only independent amplitude modulation is applied to the A phase and the B phase.
図6に示すように、基本振幅をVとして、変調振幅aの振幅変調を、A相とB相とで逆になるようにかけ、駆動周期より長い時間で見たときに、A、B両相において均等に振幅を増大させている。 As shown in FIG. 6, when the basic amplitude is V and the amplitude modulation of the modulation amplitude a is reversed between the A phase and the B phase, when viewed in a time longer than the drive cycle, both the A and B phases The amplitude is increased evenly.
本実施例の場合は、図4Aと図4Cで示した振動形態が得られる。このため、A相およびB相の腹に相当する部分の振幅が大きくなり、A相の腹部とB相の腹部の間の領域では振幅が小さくなるために、振動体1と移動体6の接触部全域にわたって均等な接触状態は得られない。それゆえ生じる偏摩耗によって回転むらの増大などが生じるおそれはあるが、そのような偏摩擦がA相、B相の両相に均等に生じるため、駆動上のアンバランスは生じない。したがって、実施例1のような位相変調を併せ用いない簡易的な駆動方法として有効である。 In the case of the present embodiment, the vibration forms shown in FIGS. 4A and 4C are obtained. For this reason, the amplitude corresponding to the antinodes of the A phase and the B phase increases, and the amplitude decreases in the region between the A phase abdomen and the B phase abdomen. A uniform contact state cannot be obtained over the entire area. Therefore, there is a possibility that uneven rotation may increase due to the uneven wear, but such uneven friction occurs evenly in both the A phase and the B phase, so that there is no drive imbalance. Therefore, it is effective as a simple driving method that does not use phase modulation as in the first embodiment.
図8には、本発明の実施例3である振動型駆動装置の駆動方法(制御方法)により駆動した場合の振動体1の振動軌跡を示す。本実施例の駆動方法は、実施例1にて説明した振動型駆動装置に適用されるものである。そして、本実施例でも、実施例1と同様に、振動体1上に形成した進行波の最大変位の極大位置を順次移動させることができる。
FIG. 8 shows a vibration locus of the vibrating
図9には、本実施例におけるA、B両相の振幅変化を示す。 FIG. 9 shows changes in the amplitude of both phases A and B in the present example.
本実施例においても、実施例2と同様に、A,B両相の駆動信号に独立した振幅変調のみを施したものであるが、A,B両相の振幅変調が単一周波数では無い点が異なる。本実施例では、変調によって送り速度の変化が生じ、回転むらが大きくなるというおそれがあるが、実施例2と比べてより簡易的な駆動方法として有効である。 In the present embodiment, as in the second embodiment, only the independent amplitude modulation is applied to the drive signals for both phases A and B, but the amplitude modulation for both phases A and B is not a single frequency. Is different. In this embodiment, there is a possibility that the feed speed changes due to the modulation and the rotation unevenness increases, but it is effective as a simpler driving method compared to the second embodiment.
さらに、図10に示すように、振幅変調を階段状または矩形状にしてもよい。 Furthermore, as shown in FIG. 10, the amplitude modulation may be stepped or rectangular.
図11には、本発明の実施例4である振動型駆動装置の制御装置の構成を示す。 FIG. 11 shows the configuration of the control device of the vibration type drive device that is Embodiment 4 of the present invention.
この制御装置は、振動型駆動装置(図12に示した振動型駆動装置)110の速度制御を行う制御装置であり、振動型駆動装置110に備え付けたエンコーダなどの速度検出器117からの速度情報と、外部(例えば、振動型駆動装置110を駆動源とする作動装置の主制御回路)から与えられた速度指令値から、それらの偏差に応じて周波数制御回路112によって駆動信号の周波数を決定し、さらに同様に、速度偏差に応じて振幅位相変調回路113で振幅変調量、位相変調量および振幅変調と位相変調の周期を決定する。
This control device is a control device that performs speed control of the vibration type drive device (vibration type drive device shown in FIG. 12) 110, and speed information from a
各変調パラメータとしては、予め速度に対して最適な変調量(変調幅)および変調周期が不図示のメモリに記憶されており、速度検出器117によって検出された速度に応じた変調パラメータが該メモリから読み出され、決定される。例えば、速度域に応じて、高速側では変調なしとし、低速側では速度が小さいほど変調振幅を大きくするなどである。
As each modulation parameter, an optimum modulation amount (modulation width) and modulation period with respect to the speed are stored in a memory (not shown), and a modulation parameter corresponding to the speed detected by the
振幅位相変調回路113によって決定された位相により周波数制御回路112からの出力の一方に位相差を与え、位相差を与えた信号ともう一方の信号をそれぞれA相,B相の駆動波形とする。A相、B相に対して独立に設けられた振幅制御回路115,116には、同様に振幅位相変調回路113で決定された2相の振幅値がそれぞれ設定され、各振幅制御回路115,116から不図示の増幅回路を介して振動型駆動装置110のA相,B相圧電素子に駆動信号が供給される。
A phase difference is given to one of the outputs from the
本実施例では、振動型駆動装置110の駆動速度に応じて振幅・位相変調の量を決定するため、駆動速度が大きく、振幅が大きい場合には変調量を小さくでき、また、振動型駆動装置110の性能劣化に関わるような微小速度においては変調を大きくすることができるため、駆動状況に応じて適切な変調をかけることができる。
In this embodiment, since the amount of amplitude / phase modulation is determined according to the driving speed of the vibration
なお、本実施例では、振動型駆動装置の速度制御のみについて説明したが、振動型駆動装置の位置決め制御でも、同様にして、振動型駆動装置110に備え付けた位置検出器によって得られる目標値との偏差から、速度および変調パラメータを決定してもよい。また、複数相での駆動の場合には、上記変調回路を駆動相の数分設ければよい。
In the present embodiment, only the speed control of the vibration type driving device has been described. However, in the positioning control of the vibration type driving device, the target value obtained by the position detector provided in the vibration
また、上述した振幅制御回路115,116としては、ゲイン可変アンプのようなものを用いてもよく、駆動信号としてパルスを用いてパルス幅制御回路と増幅回路とによって構成してもよい。
Further, as the
図11に示した制御装置は、振動の振幅変調と位相変調を同時に演算できる振幅位相変調回路113を設ける必要があり、制御装置に係る負荷が少なくない。そこで、本実施例では、もっと簡易な構成の回路にて、図11に示す制御装置と同様の効果を得る制御装置を提供しようとするものである。
The control device shown in FIG. 11 needs to be provided with an amplitude /
図17には、本発明の実施例5である振動型駆動装置の制御装置の構成を示す。
FIG. 17 shows the configuration of the control device of the vibration type driving apparatus which is
本実施例での振動型駆動装置110の構成は図12に示したものと同様である。図19は本実施例における圧電素子2に設けられた電極パターンを示し、各電極と後述する第1,第2駆動電圧生成回路との接続状態を示す接続図である。振動型駆動装置110に設けられた圧電素子2のパターン電極のA(+),B(+),A(−),B(−)に対応する電極をそれぞれ131,132,133,134とし、3個おきの電極毎に同一の駆動信号が供給される。
The configuration of the vibration
本実施例での制御装置は、振動型駆動装置110の速度制御を行う制御装置であり、振動型駆動装置110に備え付けたエンコーダなどの速度検出器117からの速度情報と、外部(例えば、振動型駆動装置110を駆動源とする作動装置の主制御回路)から与えられた速度指令値から、それらの偏差に応じて周波数位相制御回路121が駆動信号の周波数および位相を決定する。
The control device in the present embodiment is a control device that performs speed control of the vibration
各制御パラメータとしては、予め速度に対して最適な周波数および位相が不図示のメモリに記憶されており、速度検出器117によって検出された速度に応じた制御パラメータが該メモリから読み出され、決定される。
As each control parameter, an optimum frequency and phase with respect to the speed are stored in a memory (not shown) in advance, and a control parameter corresponding to the speed detected by the
周波数位相制御回路121によって決定された周波数指令はF1,F2として、位相指令はP1,P2としてそれぞれ第1駆動電圧生成回路122および第2駆動電圧生成回路123に入力される。また、周波数位相制御回路121は第1駆動電圧生成回路122および第2駆動電圧生成回路123のそれぞれの駆動(ON指令)および停止(OFF指令)を制御するON/OFF指令を第1駆動電圧生成回路122および第2駆動電圧生成回路123に入力する。
The frequency command determined by the frequency
第1駆動電圧生成回路122から周波数指令F1および位相指令P1に応じた駆動信号Φ11,Φ12が圧電素子2の電極131,132に供給され、第2駆動電圧生成回路123から周波数指令F2および位相指令P2に応じた駆動信号Φ21,Φ22が圧電素子2の電極133,134に供給される。
Drive signals Φ11 and Φ12 corresponding to the frequency command F1 and the phase command P1 are supplied from the first drive
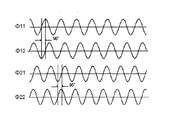
図18に駆動信号Φ11,Φ12,Φ21,Φ22の駆動波形を示す。Φ12はΦ11と周波数が等しく、時間的位相がΦ11に対して90度遅れている。Φ22はΦ21と周波数が等しく、時間的位相がΦ21に対して90度進んでいる。Φ21,Φ22の周波数はΦ11,Φ12の周波数よりも数百から数KHz高い値に設定されている。駆動信号Φ21,Φ22の時間的位相のずれは、駆動信号Φ11,Φ12の時間的位相のずれと逆向きであるため、駆動信号Φ11,Φ12によって生じる進行性振動波の進行方向と駆動信号Φ21,Φ22によって生じる進行性振動波の進行方向は逆向きになる。 FIG. 18 shows drive waveforms of the drive signals Φ11, Φ12, Φ21, and Φ22. Φ12 has the same frequency as Φ11, and the temporal phase is delayed by 90 degrees with respect to Φ11. Φ22 has the same frequency as Φ21, and the temporal phase is advanced 90 degrees with respect to Φ21. The frequencies of Φ21 and Φ22 are set to values higher by several hundreds to several KHz than the frequencies of Φ11 and Φ12. Since the temporal phase shift of the drive signals Φ21 and Φ22 is opposite to the temporal phase shift of the drive signals Φ11 and Φ12, the traveling direction of the progressive vibration wave generated by the drive signals Φ11 and Φ12 and the drive signals Φ21, The traveling direction of the progressive vibration wave generated by Φ22 is reversed.
ここで、駆動信号Φ11,Φ12によって6波の進行性振動波が振動体1上を時計回りに回転するとすれば、駆動信号Φ21、Φ22よってΦ11,Φ12による進行波と同じく6波の進行性振動波が振動体1上を反時計回りに回転する。
Here, if six progressive vibration waves are rotated clockwise on the vibrating
図20は駆動信号Φ11,Φ12の時間的位相差を90度としたときの駆動信号の周波数および移動体6の回転速度の特性と、駆動信号Φ21,Φ22の時間的位相差を90度としたときの駆動信号の周波数および移動体6の回転速度の特性を示すものである。縦軸が移動体6の回転速度を示し、横軸が駆動信号Φ11,Φ12,Φ21,Φ22の周波数を示す。本実施例では電極131,132,133,134が等間隔に配置されており、駆動信号Φ11,Φ12,Φ21,Φ22の振幅(電圧)も等しく設定されているため、駆動信号Φ11,Φ12による進行性振動波とΦ21,Φ22による進行性振動波はほぼ同じ周波数特性を有している。
FIG. 20 shows characteristics of the frequency of the drive signal and the rotational speed of the moving body 6 when the temporal phase difference between the drive signals Φ11 and Φ12 is 90 degrees, and the temporal phase difference between the drive signals Φ21 and Φ22 is 90 degrees. The characteristics of the frequency of the driving signal and the rotational speed of the moving body 6 are shown. The vertical axis represents the rotational speed of the moving body 6, and the horizontal axis represents the frequencies of the drive signals Φ11, Φ12, Φ21, and Φ22. In this embodiment, the
振動型駆動装置110は図20に示すようにその共振周波数frより高い周波数領域で駆動制御され、駆動信号の周波数を共振周波数frに近づけるほど回転速度が高くなる特性を有している。そこで駆動電圧Φ11,Φ12の周波数F1を駆動信号Φ21,Φ22の周波数F2より低くすると、振動体1上に形成される進行性振動波の振幅は駆動信号Φ11,Φ12によって形成されたもののほうが大きくなる。従って、駆動信号Φ11,Φ12によって形成された進行性振動波による回転が駆動信号Φ21,Φ22によって形成された進行性振動波による回転よりも大きくなり、移動体6の回転方向は駆動信号Φ11,Φ12によって形成される進行性振動波によって決定される。
As shown in FIG. 20, the vibration
そこで、本実施例では駆動信号Φ11,Φ12によって形成された進行性振動波が時計回りに進行するので、移動体6の回転方向はこれと反対方向である反時計回りとなることがわかる。なお、公知であるため詳細な説明は省略するが、振動波駆動装置では、移動体は進行性振動波の進行方向と反対方向に進む。このように方向の異なる進行性振動波を合成することで、駆動電圧の振幅を変化させずとも従来よりも低速で振動型駆動装置110を駆動することが可能となる。
Therefore, in this embodiment, since the progressive vibration wave formed by the drive signals Φ11 and Φ12 travels clockwise, it can be seen that the rotational direction of the moving body 6 is counterclockwise, which is the opposite direction. Although detailed description is omitted because it is publicly known, in the vibration wave driving device, the moving body travels in a direction opposite to the traveling direction of the progressive vibration wave. By synthesizing progressive vibration waves having different directions as described above, the vibration
また、駆動信号Φ11,Φ12によって形成される進行性振動波の周波数と、駆動信号Φ21,Φ22によって形成される進行性振動波の周波数が異なるため、これら2つの進行性振動波の合成によって生じる振動変位の最大値(最大変位)が増減し、かつその最大変位が極大となる位置が順次移動することになる。ここで、進行性振動波とは上記例ではリング状の振動体の円周に沿って波が回転(進行)する振動波のことであるが、位相の異なる複数の加振信号の合成によって振動体の一部に楕円振動(円振動)を形成する振動の総称のことである。ここで言う2つの進行性振動波の合成とは異なる周波数の楕円振動の合成(加算)のことである。 Further, since the frequency of the progressive vibration wave formed by the drive signals Φ11 and Φ12 is different from the frequency of the progressive vibration wave formed by the drive signals Φ21 and Φ22, the vibration generated by the synthesis of these two progressive vibration waves. The position at which the maximum value (maximum displacement) of the displacement increases and decreases and the maximum displacement becomes maximum moves sequentially. Here, the progressive vibration wave is a vibration wave in which the wave rotates (travels) along the circumference of the ring-shaped vibrating body in the above example, but the vibration is generated by combining a plurality of excitation signals having different phases. It is a general term for vibration that forms elliptical vibration (circular vibration) in a part of the body. The synthesis of two progressive vibration waves referred to here is the synthesis (addition) of elliptical vibrations having different frequencies.
実施例5では2つの進行性振動波を合成したが、他の振動周波数や他の振動モードで加振する為に、3つ以上の進行性振動波を合成しても構わない。その際、駆動信号を供給する圧電素子2の電極の数も駆動電圧生成回路の数も同時に生成する進行性振動波の数に応じて増減する必要がある。また、実施例5では2つの逆向きとなる進行性振動波を合成していたが、駆動条件に応じて、具体的には高速駆動が要求される場合には、駆動信号Φ11,Φ12,Φ21,Φ22の時間的位相を順に90度ずらし、周波数を一致させることで、従来と同様の単一の進行性振動波を発生させて振動型駆動装置110を駆動させることができる。
In the fifth embodiment, two progressive vibration waves are synthesized, but three or more progressive vibration waves may be synthesized in order to vibrate at other vibration frequencies or other vibration modes. At that time, it is necessary to increase or decrease both the number of electrodes of the
図21は、本発明の実施例6であって、1つの進行性振動波を3相の駆動信号にて発生させる場合の進行波型の振動型駆動装置の制御装置の構成を示す。 FIG. 21 is a sixth embodiment of the present invention, and shows a configuration of a control device of a traveling wave type vibration type driving device when one progressive vibration wave is generated by a three-phase driving signal.
図23は圧電素子2に設けられた電極パターンを示し、各電極と後述する第1,第2駆動電圧生成回路との接続状態を示す接続図である。圧電素子2には時計回りに電極141,142,143,144,145,146が順に繰り返し形成され、5個おきの電極毎に同一の駆動信号が供給される。
FIG. 23 shows an electrode pattern provided on the
周波数位相制御回路121によって決定された周波数指令はF1,F2として、位相指令はP1,P2としてそれぞれ第1駆動電圧生成回路122および第2駆動電圧生成回路123に入力される。また、周波数位相制御回路121は第1駆動電圧生成回路122および第2駆動電圧生成回路123のそれぞれの駆動および停止を制御するON/OFF指令を第1駆動電圧生成回路122および第2駆動電圧生成回路123に入力する。
The frequency command determined by the frequency
第1駆動電圧生成回路122から周波数指令F1および位相指令P1に応じた駆動信号Φ11,Φ12,Φ13が圧電素子2の電極141,142,143に供給され、第2駆動電圧生成回路123から周波数指令F2および位相指令P2に応じた駆動信号Φ21,Φ22,Φ23が圧電素子2の電極144,145,146に供給される。
Drive signals Φ11, Φ12, and Φ13 corresponding to the frequency command F1 and the phase command P1 are supplied from the first drive
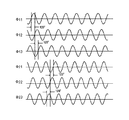
図22に示すように、Φ11,Φ12,Φ13は周波数が等しく、Φ12はΦ11に対して時間的位相が120度遅れ、Φ13はΦ12に対して時間的位相が120度遅れている。Φ21,Φ22,Φ23は周波数が等しく、Φ22はΦ21に対して時間的位相が120度進み、Φ23はΦ22に対して時間的位相が120度進んでいる。Φ21,Φ22,Φ23の周波数はΦ11,Φ12,Φ13の周波数よりも数百から数KHz高い値に設定されている。駆動信号Φ11,Φ12,Φ13,Φ21,Φ22,Φ23を供給することにより、振動体1には進行方向の異なる2つの8波の進行性振動波が形成される。
As shown in FIG. 22, Φ11, Φ12, and Φ13 have the same frequency, Φ12 has a temporal phase delayed by 120 degrees with respect to Φ11, and Φ13 has a temporal phase delayed by 120 degrees with respect to Φ12. Φ21, Φ22, and Φ23 have the same frequency, and Φ22 has a temporal phase advanced by 120 degrees with respect to Φ21, and Φ23 has a temporal phase advanced by 120 degrees with respect to Φ22. The frequencies of Φ21, Φ22, and Φ23 are set to values that are several hundreds to several KHz higher than the frequencies of Φ11, Φ12, and Φ13. By supplying the driving signals Φ11, Φ12, Φ13, Φ21, Φ22, and Φ23, two 8 traveling vibration waves having different traveling directions are formed in the vibrating
実施例5と同様に、駆動信号Φ11,Φ12,Φ13によって形成された進行性振動波による回転が駆動信号Φ21,Φ22,Φ23によって形成された進行性振動波による回転よりも大きくなり、移動体6の回転方向は駆動信号Φ11,Φ12,Φ13によって形成される進行性振動波によって決定される。 Similar to the fifth embodiment, the rotation by the progressive vibration wave formed by the drive signals Φ11, Φ12, and Φ13 is larger than the rotation by the progressive vibration wave formed by the drive signals Φ21, Φ22, and Φ23, and the moving body 6 Is determined by the progressive vibration wave formed by the drive signals Φ11, Φ12, and Φ13.
上記の実施例5および実施例6では、複数の進行性振動波を形成するために必要な複数の駆動信号のそれぞれに対して別々に電極を設けた例を示したが、この構成では駆動信号の数が増える分だけそれぞれの電極の面積が小さくなり、進行性振動波の振幅を大きくするためには各電極に供給する電圧を増大させる必要があった。 In the fifth embodiment and the sixth embodiment described above, an example in which electrodes are separately provided for each of a plurality of drive signals necessary for forming a plurality of progressive vibration waves has been described. Thus, the area of each electrode is reduced by the increase in the number, and in order to increase the amplitude of the progressive vibration wave, it is necessary to increase the voltage supplied to each electrode.
そこで、複数の駆動信号を共通する電極に供給する方法が考えられる。例えば、差動アンプ等で2つ以上の周波数指令、位相指令を持つ駆動電圧を生成して共通の電極に供給する方法があげられる。 Therefore, a method of supplying a plurality of drive signals to a common electrode can be considered. For example, there is a method of generating a drive voltage having two or more frequency commands and phase commands with a differential amplifier or the like and supplying the drive voltage to a common electrode.
図24に、上記の構成を実現するための本発明の実施例7である振動型駆動装置の制御装置の構成を示す。 FIG. 24 shows the configuration of the control device for the vibration type driving device which is Embodiment 7 of the present invention for realizing the above configuration.
圧電素子2には周方向に沿って電極151,152が順に繰り返し形成され、1個おきの電極毎に同一の駆動信号が供給される。
In the
周波数位相制御回路121によって決定された周波数指令はF1,F2として、位相指令はP1,P2としてそれぞれ第1駆動電圧生成回路122および第2駆動電圧生成回路123に入力される。また、周波数位相制御回路121は第1駆動電圧生成回路122および第2駆動電圧生成回路123のそれぞれの駆動および停止を制御するON/OFF指令を第1駆動電圧生成回路122および第2駆動電圧生成回路123に入力する。
The frequency command determined by the frequency
第1駆動電圧生成回路122はトランス161およびトランス162の一次側の一端に接続され、第2駆動電圧生成回路123はトランス161およびトランス162の一次側の他端に接続されている。
The first drive
第1駆動電圧生成回路122から周波数指令F1および位相指令P1に応じた駆動信号Φ11,Φ12がトランス161,162の一次側の一端に供給され、第2駆動電圧生成回路123から周波数指令F2および位相指令P2に応じた駆動信号Φ21,Φ22がトランス161,162の一次側の他端に供給される。
Drive signals Φ11 and Φ12 corresponding to the frequency command F1 and the phase command P1 are supplied from the first drive
このトランス161およびトランス162は差動増幅アンプを形成している。トランス161およびトランス162のそれぞれの一次側の2つの端子に異なる周波数および位相を有する駆動信号が入力され、二次側に加算増幅した振動波が出力される。なお、トランス161,162の二次側のインダクタンスは、電極151,152に対応する圧電素子の静電容量との間で計算される並列共振周波数が駆動周波数の使用範囲で所定の性能が得られる値となるように調整されている。
The
図25に、駆動信号Φ11,Φ12,Φ21,Φ22の駆動波形、トランス161の二次側の出力電圧V1、およびトランス162の二次側の出力電圧V2を示す。
FIG. 25 shows drive waveforms of the drive signals Φ11, Φ12, Φ21, and Φ22, the output voltage V1 on the secondary side of the
駆動信号Φ11,Φ12,Φ21,Φ22はパルス信号であり、Φ12はΦ11と周波数が等しく、時間的位相がΦ11に対して90度遅れている。Φ22はΦ21と周波数が等しく、時間的位相がΦ21に対して90度進んでいる。Φ21,Φ22の周波数はΦ11,Φ12の周波数よりも数百から数KHz高い値に設定されている。 The drive signals Φ11, Φ12, Φ21, and Φ22 are pulse signals, and Φ12 has the same frequency as Φ11 and the temporal phase is delayed by 90 degrees with respect to Φ11. Φ22 has the same frequency as Φ21, and the temporal phase is advanced 90 degrees with respect to Φ21. The frequencies of Φ21 and Φ22 are set to values higher by several hundreds to several KHz than the frequencies of Φ11 and Φ12.
これらの信号をトランス161,162の一次側に入力すると、トランス161,162の二次側にはAM変調された電圧V1,V2が出力される。このトランス161,162の出力電圧V1,V2を電極151,152に供給することで、振動体1の表面には実施例5と同様に、振動変位の最大値(最大変位)が増減し、かつその最大変位が極大となる位置が順次移動する進行性振動波が形成される。このように、差動アンプ等で2つ以上の周波数指令、位相指令を持つ駆動電圧を生成して共通の電極に供給することによって、実施例5あるいは実施例6に示した構成よりも低い電圧で振動波駆動装置110を低速駆動させることが可能となる。
When these signals are input to the primary side of the
図26に図24の制御装置の変形例を示す。これはトランス161,162の代わりにインダクタ素子171,172,173,174を用いた制御装置である。インダクタ素子171,172,173,174は、それらのインダクタンスと電極151,152に対応する圧電素子の静電容量との間で計算される並列共振周波数が所定の関係となるように設定されている。駆動信号Φ11,Φ12と接続されるインダクタ素子171,172と、駆動信号Φ21,Φ22に接続されるインダクタ素子173,174のインダクタ値は異なっていても構わない。
FIG. 26 shows a modification of the control device of FIG. This is a control device using
なお、本実施例では、周波数位相制御回路121からOFF指令が出力された場合は、第1駆動電圧生成回路122および第2駆動電圧生成回路123の出力の双方あるいは一方をフローティング状態にするか、双方を同電位とする必要がある。
In this embodiment, when an OFF command is output from the frequency
図27は、図26に示す制御装置の変形例であって、圧電素子2の両面に形成された電極に異なる周波数の駆動信号を供給する構成としたものである。インダクタ素子171,173の出力信号を一方の圧電素子の両面に形成された電極151a,151bに接続し、インダクタ素子172,174を他方の圧電素子の両面に形成された電極152a,152bに接続している。振動型駆動装置110の制御方法は、図26に示す制御装置と同様である。振動型駆動装置110を素早く停止させようとする場合は、振動体1の振動を素早く抑制するために、周波数位相制御回路121からOFF指令が入力された際の出力電圧のままで停止させる必要がある。
FIG. 27 shows a modification of the control device shown in FIG. 26, in which drive signals having different frequencies are supplied to the electrodes formed on both surfaces of the
次に、図24に示す制御装置を例にあげて、周波数位相制御回路121が行う具体的な制御方法をフローチャートを用いて説明する。
Next, a specific control method performed by the frequency
進行方向が逆である2つの進行性振動波を同時に振動体1上に形成することは、一方の進行性振動波のみを振動体1上に形成する場合よりも駆動効率が落ちる懸念がある。しかしながら、従来の単一の進行性振動波によって低速駆動を実現した場合は、図45に示すように振動体1の振動振幅が小さいために移動体6と振動体1との接触領域が増大し、振動体1と移動体6の間の滑り摩擦によって振動体1の負荷が増大して、やはり効率が低下してしまう。
Forming two progressive vibration waves having opposite traveling directions on the vibrating
そこで振動型駆動装置110の低速駆動時には2つの進行性振動波を逆方向に進行させ、高速駆動時には2つの進行性振動波を1つに統合することが考えられる。実際の速度、指令速度、振動体の振動振幅、駆動信号の周波数等をパラメータとして、これらが所定の値をよぎるポイントを境にして、あるいはこの境界近傍において2つの進行波を1つに統合する何らかの手段が必要となる。例えばこの境界をよぎる際に、一方の駆動電圧生成回路の出力を他方と同じ波形に切り替えることが考えられる。
Therefore, it is conceivable to cause the two progressive vibration waves to travel in opposite directions when the vibration
図28には、本発明の実施例8である振動型駆動装置の制御装置のフローチャートを示す。
FIG. 28 shows a flowchart of the control device of the vibration type driving apparatus which is
振動型駆動装置110の駆動を開始すると、ステップS101にて第1駆動電圧生成回路122および第2駆動電圧生成回路123を駆動させるためON指令を出力し、位相指令P1を90度、位相指令P2を−90度に設定する。ここで、位相指令P1はΦ11に対するΦ12の時間的位相のずれを、位相指令P2はΦ21に対するΦ22の時間的位相のずれを設定しており、この場合は駆動信号Φ12がΦ11よりも時間的位相で90度遅れ、駆動信号Φ22がΦ21よりも90度進んでいることになる。
When the drive of the vibration
次にステップS102にて外部から与えられた速度指令値Vsを読み出し、現在の移動体6の速度情報Vrを検出する。 In step S102, the speed command value Vs given from the outside is read out, and the current speed information Vr of the moving body 6 is detected.
次にステップS103にて速度指令値Vsが0であるかを確認し、0でなければステップS104に進み、0であればステップS111に進む。 Next, in step S103, it is confirmed whether the speed command value Vs is 0. If it is not 0, the process proceeds to step S104, and if it is 0, the process proceeds to step S111.
ステップS104にて速度指令値Vsを所定速度V0と比較する。速度指令値Vsが所定速度V0以下であればステップS105へ進み、速度指令値Vsが所定速度V0より大きければステップS106へと進む。 In step S104, the speed command value Vs is compared with a predetermined speed V0. If the speed command value Vs is less than or equal to the predetermined speed V0, the process proceeds to step S105, and if the speed command value Vs is greater than the predetermined speed V0, the process proceeds to step S106.
ステップS105にてON指令を出力して第2駆動電圧生成回路123を駆動させ、ステップS107に進む。このステップでは速度指令値Vsが所定速度V0以下であり、2つの進行方向の異なる進行性振動波を発生させて低速駆動を行わせるため、第1駆動電圧生成回路122と第2駆動電圧生成回路123を駆動させる。すでに第2駆動電圧生成回路123が駆動状態であればこのステップはとばされる。
In step S105, an ON command is output to drive the second drive
ステップS106にてOFF指令を出力して、第2駆動電圧生成回路123の出力をグランドにショートさせ、ステップS107に進む。第2駆動電圧生成回路123の出力をグランドにショートさせることで第1駆動電圧生成回路122の出力電圧によってのみ形成された周波電圧が電極151,152に供給されることになる。このステップでは速度指令値Vsが所定速度V0よりも大きく、単一の進行性振動波のみを発生させて高速駆動を行わせるため、第1駆動電圧生成回路122のみを駆動させる。すでに第2駆動電圧生成回路123の出力がグランドにショートさせた状態であればこのステップはとばされる。
In step S106, an OFF command is output, the output of the second drive
ステップS107にて速度指令値Vsと速度情報Vrを比較する。VsがVrより大きければステップS108に進み、VsがVr以下であればステップS109に進む。 In step S107, the speed command value Vs is compared with the speed information Vr. If Vs is larger than Vr, the process proceeds to step S108, and if Vs is equal to or less than Vr, the process proceeds to step S109.
ステップS108にて移動体6の移動速度を増大させるため周波数指令F1,F2を所定周波数Fdだけ下げ、ステップS102に進む。 In step S108, the frequency commands F1 and F2 are decreased by a predetermined frequency Fd to increase the moving speed of the moving body 6, and the process proceeds to step S102.
ステップS109にて速度指令値Vsと速度情報Vrが等しければ周波数指令F1,F2を維持してステップS102に進み、等しくなければステップS110に進む。 If the speed command value Vs and the speed information Vr are equal in step S109, the frequency commands F1 and F2 are maintained and the process proceeds to step S102, and if not equal, the process proceeds to step S110.
ステップS110にて移動体6の移動速度を減少させるため周波数指令F1,F2を所定周波数Fdだけ上げ、ステップS102に進む。 In step S110, the frequency commands F1 and F2 are increased by a predetermined frequency Fd to decrease the moving speed of the moving body 6, and the process proceeds to step S102.
速度指令値Vsが0となるまでステップS102からステップS108、ステップS109、あるいはステップS110を繰り返し、速度指令値Vsが0になるとステップS103よりステップS111に進む。
ステップS111では第1駆動電圧生成回路122,第2駆動電圧生成回路123にOFF指令を出力するとともに、周波数指令F1,F2および位相指令P1,P2の設定を解除する。
Step S102 to step S108, step S109, or step S110 are repeated until the speed command value Vs becomes 0. When the speed command value Vs becomes 0, the process proceeds from step S103 to step S111.
In step S111, an OFF command is output to the first drive
なお、本実施例ではステップS104からステップS106にて速度指令値Vsの値に応じて第2駆動電圧生成回路123のON/OFFを切り換えたが、速度指令値Vsの代わりに速度情報Vrの値に応じて第2駆動電圧生成回路123のON/OFFを切り換える構成としても構わない。また、速度指令値Vsと速度情報Vrの比較結果に応じて設定された周波数指令F1、F2の値に応じて第2駆動電圧生成回路123のON/OFFを切換える構成としても構わない。
In this embodiment, the second drive
上記の実施例8では2つの進行性振動波の一方の振幅を0にするために、第2駆動電圧生成回路123の出力をグランドにショートしたが、駆動信号Φ11とΦ12の関係はそのままとして、駆動信号Φ11とΦ21を同位相、駆動信号Φ12とΦ22を同位相として同方向に進行する2つの進行性振動波を合成したり、あるいは、駆動信号Φ11とΦ12の関係はそのままとして、駆動信号Φ11とΦ21を逆位相、駆動信号Φ12とΦ22を逆位相として単一の進行性振動波を発生させるほうが良い場合もある。
In Example 8 above, the output of the second drive
また、2つの進行性振動波の一方の振幅を0にするために、第2駆動電圧生成回路123の出力をグランドにショートすると、移動体6を反対方向に駆動しようとする進行性振動波の振幅が急激に変化するため、移動体6に衝撃を与えてしまう可能性がある。
Further, when the output of the second drive
そこで、第2駆動電圧生成回路123の出力を徐々に小さくする制御が必要となる。単純な方法としては、第2駆動電圧生成回路123の出力電圧の振幅を徐々に小さくしてグランドにショートすることが考えられる。あるいは第2駆動電圧生成回路123の出力電圧の振幅を、速度検出器117の出力や速度指令値あるいは駆動信号の周波数等の関数とし、所定の速度よりも高速側では信号振幅が小さくなるよう不図示の設定手段によって設定することが考えられる。
Therefore, it is necessary to control to gradually reduce the output of the second drive
図29Aに速度指令と出力電圧の振幅の関係を、図29Bに周波数指令と出力電圧の振幅の関係を示す。図29Aは第2駆動電圧生成回路123の出力電圧の振幅PWが速度指令によって変化する例、図29Bは第2駆動電圧生成回路123の出力電圧の振幅PWと駆動信号の周波数指令F2の関係を示す図である。
FIG. 29A shows the relationship between the speed command and the amplitude of the output voltage, and FIG. 29B shows the relationship between the frequency command and the amplitude of the output voltage. FIG. 29A shows an example in which the amplitude PW of the output voltage of the second drive
図30に周波数指令と位相指令の関係を示す。図30では、周波数位相制御回路121が決定した周波数指令F1の値が移動体6を所定速度V0以下で駆動するf0以上である場合は位相指令P2を−90度とし、周波数位相制御回路121が決定した周波数指令F1の値が移動体6を所定速度V1以上で駆動するf1以下である場合は位相指令P2を90度とし、周波数指令F1の値がf0からf1に変化する間は周波数指令の変化に従って位相指令が−90度から90度へと変化している。図31に図30に示す特性を用いた振動型駆動装置の制御のフローチャートを示す。
FIG. 30 shows the relationship between the frequency command and the phase command. In FIG. 30, when the value of the frequency command F1 determined by the frequency
振動型駆動装置110の駆動を開始すると、ステップS201にて第1駆動電圧生成回路122および第2駆動電圧生成回路123を駆動させるためON指令を出力し、位相指令P1を90度、位相指令P2を−90度に設定する。ここで、位相指令P1はΦ11に対するΦ12の時間的位相のずれを、位相指令P2はΦ21に対するΦ22の時間的位相のずれを設定しており、この場合は駆動信号Φ12がΦ11よりも時間的位相で90度遅れ、駆動信号Φ22がΦ21よりも90度進んでいることになる。また、周波数指令F1,F2を予めメモリ等に記憶されている別々の初期周波数に設定する。
When driving of the vibration
次にステップS202にて外部から与えられた速度指令値Vsを読み出し、現在の移動体6の速度情報Vrを検出する。 Next, in step S202, the speed command value Vs given from the outside is read, and the current speed information Vr of the moving body 6 is detected.
次にステップS203にて速度指令値Vsが0であるかを確認し、0でなければステップS204に進み、0であればステップS209に進む。 Next, in step S203, it is confirmed whether the speed command value Vs is 0. If it is not 0, the process proceeds to step S204, and if it is 0, the process proceeds to step S209.
ステップS204にて速度指令値Vsと速度情報Vrを比較する。VsがVrより大きければステップS205に進み、VsがVr以下であればステップS206に進む。 In step S204, the speed command value Vs is compared with the speed information Vr. If Vs is greater than Vr, the process proceeds to step S205, and if Vs is equal to or less than Vr, the process proceeds to step S206.
ステップS205にて移動体6の移動速度を増大させるため周波数指令F1,F2を所定周波数Fdだけ下げ、ステップS208に進む。 In step S205, in order to increase the moving speed of the moving body 6, the frequency commands F1 and F2 are decreased by a predetermined frequency Fd, and the process proceeds to step S208.
ステップS206にて速度指令値Vsと速度情報Vrが等しければ周波数指令F1,F2を維持してステップS208に進み、等しくなければステップS207に進む。 If the speed command value Vs and the speed information Vr are equal in step S206, the frequency commands F1 and F2 are maintained and the process proceeds to step S208. If not equal, the process proceeds to step S207.
ステップS207にて移動体6の移動速度を減少させるため周波数指令F1,F2を所定周波数Fdだけ上げ、ステップS208に進む。 In step S207, the frequency commands F1 and F2 are increased by a predetermined frequency Fd to decrease the moving speed of the moving body 6, and the process proceeds to step S208.
ステップS208では周波数指令F1に対応する位相指令P2を関数Gを用いて求め、周波数指令F1,F2,P1,およびP2を出力し、ステップS202に進む。関数Gは図30に示す値であり、数式でもデータテーブルによるものでも良い。 In step S208, the phase command P2 corresponding to the frequency command F1 is obtained using the function G, the frequency commands F1, F2, P1, and P2 are output, and the process proceeds to step S202. The function G is a value shown in FIG. 30, and may be a mathematical expression or a data table.
速度指令値Vsが0となるまでステップS202からステップS208を繰り返し、速度指令値Vsが0になるとステップS203よりステップS209に進む。 Steps S202 to S208 are repeated until the speed command value Vs becomes 0. When the speed command value Vs becomes 0, the process proceeds from step S203 to step S209.
ステップS209では第1駆動電圧生成回路122,第2駆動電圧生成回路123にOFF指令を出力するとともに、周波数指令F1,F2および位相指令P1,P2の設定を解除する。
In step S209, an OFF command is output to the first drive
この制御方法によれば、速度指令が所定速度に対して高速の場合には第1駆動電圧生成回路122と第2駆動電圧生成回路123の出力信号の位相差が同方向となり、効率低下を抑え、所定速度より遅い場合には第1駆動電圧生成回路122と第2駆動電圧生成回路123の出力信号の位相差が逆方向となり、低速でも安定に駆動できるようになる。なお、上記実施例では駆動波形の加算処理を差動増幅回路等で行っているが、デジタル的に波形データを加算処理してD/A変換回路でアナログ電圧にしてから増幅して圧電素子に供給する方法であっても構わない。また、増幅回路として公知のD級増幅器を用いても良い。ただし、D級増幅器のスイッチング周期は最低でも複数の進行性振動波の周波数の最も高い周波数の周期に対して10分の1程度の周期は必要であると考えられる。
According to this control method, when the speed command is higher than the predetermined speed, the phase difference between the output signals of the first drive
図32には、本発明の実施例10である振動型駆動装置の制御装置を示す。 FIG. 32 shows a control device for a vibration type driving apparatus which is Embodiment 10 of the present invention.
本実施例での振動型駆動装置の構成は図12に示したものと同様である。振動型駆動装置110に設けられた圧電素子2には、周方向にA(+),B(+),A(−),B(−)の順に電極が配置された電極パターンが形成されており、周波数位相制御回路121の周波数指令F1および位相指令P1に従って駆動電圧生成回路124がこれらの電極に駆動信号を供給する。
The configuration of the vibration type driving device in this embodiment is the same as that shown in FIG. An electrode pattern in which electrodes are arranged in the order of A (+), B (+), A (−), and B (−) in the circumferential direction is formed on the
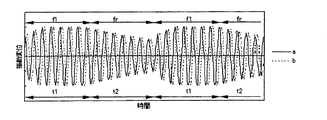
図33には、本実施例におけるA相およびB相の駆動信号の波形を示す。図中、実線で示した波形がA相の駆動信号の波形、破線で示した波形がB相の駆動信号の波形であり、状態1と状態2を交互に繰り返す波形となっている。状態1とは、A相の駆動信号の時間的位相をB相の駆動信号よりも90度進め、両者の周波数をともにf1とし、t1の時間だけ継続するものである。状態2とは、A相の駆動信号の時間的位相をB相の駆動信号よりも90度遅らせ、両者の周波数をともにf2とし、t2の時間だけ継続するものである。周波数f1,f2は振動子の共振周波数frよりも高く、さらにf1≦f2の関係にある。
FIG. 33 shows waveforms of A-phase and B-phase drive signals in the present embodiment. In the figure, the waveform shown by the solid line is the waveform of the A-phase drive signal, the waveform shown by the broken line is the waveform of the B-phase drive signal, and the waveform repeats the
また、状態1および状態2は、それぞれが断続的に繰り返されているが、断続的に出力される状態1の駆動信号の位相は一致しており、状態2についても同様である。状態1では移動体6を反時計方向に回転させる進行性振動波を発生させる周波数f1の駆動信号が圧電素子2に供給され、状態2では移動体6を時計方向に回転させる進行性振動波を発生させる周波数f2の駆動信号が圧電素子2に供給される。
In addition, the
図34Aに状態1のみの駆動信号の波形を、図34Bにそれによる振動体の振動変位を示す。状態1の継続時間であるt1、および状態2の継続時間であるt2は、それぞれ他方の時間で加振されて発生した振動波の減衰振動が消滅しない値に設定される。こうすることによって、図34Bに示すように、t1の間は周波数f1の強制振動となり、t2の間はt1で発生した強制振動が共振周波数frの減衰振動となり、この減衰振動が消滅する前に再び周波数f1の強制振動となる。
FIG. 34A shows the waveform of the driving signal only in
図35Aに状態2のみの駆動信号の波形を、図35Bにそれによる振動体の振動変位を示す。状態1の場合と同様に、図35Bに示すように、t2の間は周波数f2の強制振動となり、t1の間はt2で発生した強制振動が共振周波数frの減衰振動となり、この減衰振動が消滅する前に再び周波数f2の強制振動となる。
FIG. 35A shows the waveform of the driving signal only in
駆動信号を交互に状態1,状態2とした場合の振動体の応答振幅を図36および図37に示す。図中、黒丸が状態1,状態2のそれぞれ場合の応答振幅を示す。
FIG. 36 and FIG. 37 show the response amplitude of the vibrating body when the driving signal is alternately in the
図36はt1区間(状態1)の振動体の応答振幅であり、周波数f1のA相,B相の駆動信号による強制振動と、周波数f2のA相,B相の駆動信号による強制振動から減衰した周波数frの減衰振動が重畳されたものとなる。 FIG. 36 shows the response amplitude of the vibrating body in the t1 section (state 1), which is attenuated from the forced vibration caused by the A-phase and B-phase drive signals having the frequency f1, and the forced vibration caused by the A-phase and B-phase drive signals having the frequency f2. The damped vibration of the frequency fr is superimposed.
図37はt2区間(状態2)の振動体の応答振幅であり、周波数f2のA相,B相の駆動信号による強制振動と、周波数f1のA相,B相の駆動信号による強制振動から減衰した周数frの減衰振動が重畳されたものとなる。 FIG. 37 shows the response amplitude of the vibrating body in the t2 section (state 2), which is attenuated from the forced vibration caused by the A phase and B phase drive signals having the frequency f2 and the forced vibration caused by the A phase and B phase drive signals having the frequency f1. The damped vibration having the frequency fr is superimposed.
本実施例では、振動子の共振周波数frに対して、fr<f1<f2の関係になるように各周波数を設定しているため、図36および図37に示したように、状態1のときは周波数f1による強制振動の応答振幅が、周波数2による強制振動後の減衰振動の応答振幅よりも大きくなり、状態2のときは周波数f1による強制振動後の減衰振動の応答振幅が、周波数2による強制振動の応答振幅よりも大きくなる。よって、状態1でも状態2でも移動体6は反時計方向に回転される。
In this embodiment, each frequency is set so as to satisfy the relationship fr <f1 <f2 with respect to the resonance frequency fr of the vibrator. Therefore, as shown in FIG. 36 and FIG. The response amplitude of the forced vibration due to the frequency f1 is larger than the response amplitude of the damped vibration after the forced vibration due to the
図38には状態1と状態2を交互に繰り返した場合の振動体の振動変位を示す。A相の駆動信号およびB相の駆動信号の加振による応答振幅は、図のように1/(f2−fr)および1/(f1−fr)の周期で振幅および位相に変調がかかった変調波形となる。
FIG. 38 shows the vibration displacement of the vibrating body when the
図39は、図38に示した変調波形となった振動波の振動軌跡であり、A相、B相の振動変位を横軸、縦軸としたAB平面上で示したものである。本実施例によれば、図1と同様の振動軌跡を得ることができる。 FIG. 39 shows the vibration trajectory of the vibration wave having the modulation waveform shown in FIG. 38, which is shown on the AB plane with the horizontal and vertical axes representing the vibration displacement of the A phase and the B phase. According to the present embodiment, a vibration locus similar to that shown in FIG. 1 can be obtained.
図40には、本発明の実施例11である振動型駆動装置の制御装置における駆動信号の周波数と振動体の応答振幅の関係を示す。
FIG. 40 shows the relationship between the frequency of the drive signal and the response amplitude of the vibrating body in the control device for the vibration type drive device that is
本実施例は、交互に加振する状態1および状態2の駆動信号の周波数の差Δfは保持したまま、駆動信号の周波数を増減させて移動体の駆動速度を変化させるものである。
In the present embodiment, the drive speed of the moving body is changed by increasing or decreasing the frequency of the drive signal while maintaining the frequency difference Δf between the drive signals of the
図中f1とf2および、f1’とf2’はそれぞれ高速駆動側、低速駆動側における駆動信号の周波数を示しており、周波数が共振周波数から離れて高くなるほど、振動体の応答振幅が低下するとともに、状態1のときの振動体の応答振幅と状態2のときの振動体の応答振幅の差が減少する。
In the figure, f1 and f2 and f1 ′ and f2 ′ indicate the frequency of the drive signal on the high-speed drive side and the low-speed drive side, respectively, and the response amplitude of the vibrating body decreases as the frequency increases from the resonance frequency. The difference between the response amplitude of the vibrating body in
合成される2つの振動の応答振幅の差が小さいほど、A相,B相の駆動信号の応答振幅によって形成される楕円軌跡の短軸振幅が減少するため、接触部の振幅を大きく低下させることなく、接触面における駆動速度を下げることができる。本実施例の駆動方法は、振動子と移動体が全面で接触するような低速駆動時に有効であり、通常の駆動速度では単一の進行性振動波で駆動し、低速駆動時に本実施例に示した駆動に切り替えるとよい。 The smaller the difference between the response amplitudes of the two vibrations synthesized, the smaller the short-axis amplitude of the elliptical trajectory formed by the response amplitudes of the A-phase and B-phase drive signals, so that the amplitude of the contact portion is greatly reduced. In addition, the driving speed on the contact surface can be reduced. The driving method of this embodiment is effective at low speed driving where the vibrator and the moving body are in contact with the entire surface, and is driven by a single progressive vibration wave at normal driving speed, and is applied to this embodiment at low speed driving. Switch to the drive shown.
図41には、本発明の実施例12である振動型駆動装置の制御装置における駆動信号の周波数と振動体の応答振幅の関係を示す。
FIG. 41 shows the relationship between the frequency of the drive signal and the response amplitude of the vibrator in the control device for the vibration type drive device that is
本実施例は、状態1のA相,B相の駆動信号の周波数f1を固定とし、状態2のA相,B相の駆動信号の周波数f2を可変として駆動速度を変化させるものである。
In this embodiment, the frequency f1 of the A phase and B phase drive signals in the
状態2でのA相,B相の駆動信号の周波数をf2よりも低いf2’として、状態2による強制振動および減衰振動の応答振幅を増加させることによって、移動体6の送り速度を低下させることができる。さらにf2をf1と一致させることによってAB平面上での軌跡は線状となって送り速度0となり、f2をf1より小さい値とすることで反転動作を行うことも可能である。
Decreasing the feed rate of the moving body 6 by increasing the response amplitude of forced vibration and damped vibration in
図42には、実施例13におけるA相およびB相の駆動信号の波形を示す。 FIG. 42 shows waveforms of A-phase and B-phase drive signals in the thirteenth embodiment.
本実施例では、周波数位相制御回路に代えて周波数時間制御回路を設け、状態1および状態2の継続時間であるt1およびt2の比を変化させることによって速度を可変とするものである。
In this embodiment, a frequency time control circuit is provided in place of the frequency phase control circuit, and the speed is made variable by changing the ratio of t1 and t2, which are the duration times of
状態1の継続時間t1を状態2の継続時間t2よりも長くすることによって、周波数f1の強制振動の振動エネルギを十分に大きくすることができる。さらに、t2の期間がt1の期間に対して相対的に短くなるため、状態2での周波数f1の強制振動後の減衰振動の減衰量が小さいうちに次の強制振動に切り替わることから、状態1の強制振動振幅、および状態1の減衰振動振幅を大きくして振動体の移動体との接触面に形成される楕円軌跡の短軸を大きくし、駆動速度を上げることができる。
By making the duration t1 of
このように振動型駆動装置110の駆動速度に応じて状態1の継続時間t1と状態2の継続時間t2を操作することによって駆動速度を変化させることができる。t2を減じて0まで変化させることで、低速駆動から単一の進行性振動波による駆動へと連続的に変化させることができるため、振動体と移動体が全面接触となる低速駆動時から、振動体と移動体が一部で接触する通常の速度までの幅広いレンジにおける速度変更が可能となる。また、t2をt1より大きくとり、周波数f2をf1よりも大きく設定することで反転動作も可能となる。
In this way, the driving speed can be changed by manipulating the duration t1 of
図43Aは実施例14におけるモニター回路の出力波形を示し、図43Bは実施例14における駆動信号波形を示す。 FIG. 43A shows the output waveform of the monitor circuit in the fourteenth embodiment, and FIG. 43B shows the drive signal waveform in the fourteenth embodiment.
状態1での強制振動を停止した後に減衰振動として振動しているt2の間は、振動子および移動子の自由振動の周期となるため、次に供給する状態1との間の位相が変化する。状態1での強制振動の応答位相に対して、減衰振動と次の状態1の位相が外れてくるため、効率的な加振にならない。そこで本実施例では、振動体の振動変位または歪をモニターする回路を設け、駆動信号の供給開始時に減衰振動に対して所定の位相で加振するように加振位相を可変としたものである。図43AのSa,Sbはモニター回路から得られた信号であり、次の状態1の開始時に、強制振動時の振動変位の位相、あるいは予め決められた所定の位相になるように駆動信号の位相を合わせることによって、強制振動の開始時に加振力が効率良く働くようにしている。
During the period t2 during which the forced vibration in the
なお、上記の複数の実施例で説明した制御装置の構成は例にすぎず、振動体1上に形成した進行波の最大変位の極大位置を順次移動させるように駆動信号を制御するものであれば、どのような構成であってもよい。
Note that the configurations of the control devices described in the above embodiments are merely examples, and control the drive signal so that the maximum position of the maximum displacement of the traveling wave formed on the vibrating
また、上記の複数の実施例では、ハードウェアによって駆動信号の制御を行う場合について説明したが、同様な制御をコンピュータプログラム(制御プログラム)によってコンピュータに実行させることも可能である。このプログラムを記憶した情報処理装置によって読み取り可能な記憶媒体にも本発明を適用することが可能である。 Further, in the above embodiments, the case where the drive signal is controlled by hardware has been described, but it is also possible to cause the computer to execute similar control by a computer program ( control program) . The present invention can also be applied to a storage medium readable by an information processing apparatus that stores this program.
また、上記各実施例では、円環型の振動型駆動装置の制御について説明したが、本発明は、振動体に、同形状(もしくは同種類)で時間的位相の異なる複数の振動を励起し、その合成により進行性振動を励起するタイプの振動型駆動装置であれば、いずれの形態のものにも適用することができる。 In each of the above embodiments, the control of the annular vibration type driving device has been described. However, the present invention excites a plurality of vibrations having the same shape (or the same type) and different temporal phases on the vibrating body. As long as it is a vibration type driving device that excites progressive vibration by its synthesis, it can be applied to any form.
1 振動体
1A 弾性体
2 圧電素子
4 くし歯状突起
5 摩擦材
6 移動体
8 加圧バネ
9 ディスク
10 ハウジング
DESCRIPTION OF
Claims (9)
前記振動体に第1進行性振動を励起するため、位相の異なる複数の駆動信号を前記電気−機械エネルギ変換素子に供給する第1駆動回路と、 A first drive circuit for supplying a plurality of drive signals having different phases to the electromechanical energy conversion element to excite a first progressive vibration in the vibrator;
前記振動体に前記第1進行性振動とは別の第2進行性振動を励起するため、位相の異なる複数の駆動信号を前記電気−機械エネルギ変換素子に供給する第2駆動回路と、 A second drive circuit for supplying a plurality of drive signals having different phases to the electro-mechanical energy conversion element in order to excite the second progressive vibration different from the first progressive vibration in the vibrating body;
前記第1駆動回路が供給する駆動信号の周波数及び前記第2駆動回路が供給する駆動信号の周波数を設定する周波数制御手段とを有し、 Frequency control means for setting the frequency of the drive signal supplied by the first drive circuit and the frequency of the drive signal supplied by the second drive circuit;
前記周波数制御手段は、前記第1駆動回路と前記第2駆動回路が供給する駆動信号に対して異なる周波数を設定し、前記第1進行性振動と前記第2進行性振動を同時に励起させることを特徴とする振動型駆動装置の制御装置。 The frequency control means sets different frequencies for the drive signals supplied from the first drive circuit and the second drive circuit, and simultaneously excites the first progressive vibration and the second progressive vibration. A control device for a vibration type drive device.
前記周波数制御手段は、前記速度検出手段により得られた速度情報と与えられた速度指令値との偏差から、前記第1進行性振動と前記第2進行性振動のそれぞれの駆動周波数を決定することを特徴とする請求項2に記載の振動型駆動装置の制御装置。 The frequency control means determines drive frequencies of the first progressive vibration and the second progressive vibration from a deviation between the speed information obtained by the speed detection means and a given speed command value. The control device of the vibration type driving device according to claim 2.
前記振動体に進行性振動を励起するため、位相の異なる複数の駆動信号を前記電気−機械エネルギ変換素子に供給する駆動回路と、 A drive circuit for supplying a plurality of drive signals having different phases to the electromechanical energy conversion element in order to excite progressive vibration in the vibrating body;
前記駆動回路が供給する前記複数の駆動信号の周波数を制御する周波数制御手段とを有し、Frequency control means for controlling the frequency of the plurality of drive signals supplied by the drive circuit;
前記周波数制御手段は、前記駆動回路に前記複数の駆動信号を第1の周波数にて前記電気−機械エネルギ変換素子に供給させることで、前記弾性体に第1の進行性振動を励起し、The frequency control means excites the first progressive vibration in the elastic body by causing the drive circuit to supply the plurality of drive signals to the electromechanical energy conversion element at a first frequency,
前記周波数制御手段は、前記駆動回路が前記複数の駆動信号を第1の周波数にて前記電気−機械エネルギ変換素子に供給するのを停止させ、前記第1の進行性振動による減衰振動が生じている間に、前記複数の駆動信号を第2の周波数にて前記電気−機械エネルギ変換素子に供給させることで、前記弾性体に第2の進行性振動を前記減衰振動に重畳させて励起することを特徴とする振動型駆動装置の制御装置。The frequency control means stops the drive circuit from supplying the plurality of drive signals to the electro-mechanical energy conversion element at a first frequency, and a damped vibration is generated by the first progressive vibration. During this time, the plurality of drive signals are supplied to the electro-mechanical energy conversion element at a second frequency to excite the elastic body with the second progressive vibration superimposed on the damped vibration. A control device for a vibration type driving device.
前記周波数制御手段は、前記速度検出手段により得られた速度情報から、前記第1の周波数および前記第2の周波数の駆動信号のそれぞれを前記電気−機械エネルギ変換素子に供給させる継続時間を決定することを特徴とする請求項5に記載の振動型駆動装置の制御装置。 The frequency control means determines, from the speed information obtained by the speed detection means, a duration for which each of the drive signals of the first frequency and the second frequency is supplied to the electromechanical energy conversion element. The control device of the vibration type driving device according to claim 5.
前記振動体に第1進行性振動を励起するため、前記電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数を設定する工程と、 Setting a first frequency as frequencies of a plurality of drive signals supplied to the electro-mechanical energy conversion element to excite a first progressive vibration in the vibrating body;
前記振動体に前記第1進行性振動とは別の第2進行性振動を励起するため、前記電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数とは異なる第2の周波数を設定する工程と、 In order to excite the second progressive vibration different from the first progressive vibration in the vibrating body, a second frequency different from the first frequency as the frequency of the plurality of drive signals supplied to the electro-mechanical energy conversion element Setting the frequency of
位相の異なる複数の第1の周波数の駆動信号を前記電気−機械エネルギ変換素子に供給するとともに、位相の異なる複数の第2の周波数の駆動信号を前記電気−機械エネルギ変換素子に供給し、前記第1進行性振動と前記第2進行性振動を同時に励起させる工程とを有することを特徴とする振動型駆動装置の制御方法。 Supplying a plurality of first-frequency drive signals having different phases to the electro-mechanical energy conversion element, and supplying a plurality of second-frequency drive signals having different phases to the electro-mechanical energy conversion element; A control method for a vibration type driving apparatus, comprising the step of simultaneously exciting the first progressive vibration and the second progressive vibration.
前記振動体に第1進行性振動を励起するため、前記電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数を設定する工程と、 Setting a first frequency as frequencies of a plurality of drive signals supplied to the electro-mechanical energy conversion element to excite a first progressive vibration in the vibrating body;
前記振動体に前記第1進行性振動とは別の第2進行性振動を励起するため、前記電気−機械エネルギ変換素子に供給する複数の駆動信号の周波数として第1の周波数とは異なる第2の周波数を設定する工程と、 In order to excite the second progressive vibration different from the first progressive vibration in the vibrating body, a second frequency different from the first frequency as the frequency of the plurality of drive signals supplied to the electro-mechanical energy conversion element Setting the frequency of
前記複数の駆動信号を前記第1の周波数にて前記電気−機械エネルギ変換素子に供給することで、前記弾性体に第1の進行性振動を励起する工程と、Supplying the plurality of drive signals to the electromechanical energy conversion element at the first frequency to excite a first progressive vibration in the elastic body;
前記複数の駆動信号を前記第1の周波数にて前記電気−機械エネルギ変換素子に供給するのを停止し、前記第1の進行性振動による減衰振動が生じている間に、前記複数の駆動信号を前記第2の周波数にて前記電気−機械エネルギ変換素子に供給することで、前記弾性体に第2の進行性振動を前記減衰振動に重畳させて励起する工程とを有することを特徴とする振動型駆動装置の制御方法。The supply of the plurality of drive signals to the electro-mechanical energy conversion element at the first frequency is stopped, and the plurality of drive signals are generated while the damped vibration is generated by the first progressive vibration. Supplying the electro-mechanical energy conversion element with the second frequency to excite the elastic body with the second progressive vibration superimposed on the damped vibration. Control method of vibration type driving device.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004081135A JP4208753B2 (en) | 2004-03-19 | 2004-03-19 | Control device for vibration type drive device, control method for vibration type drive device, control program for vibration type drive device |
| US10/809,540 US7129618B2 (en) | 2003-03-31 | 2004-03-26 | Control apparatus capable of low-speed driving of vibration type driving apparatus, actuating apparatus using the control apparatus, control method capable of low-speed driving of vibration type driving apparatus, and storage medium storing program including program codes capable of realizing the control method |
| DE602004025527T DE602004025527D1 (en) | 2003-03-31 | 2004-03-30 | Control device and method for operating a low-speed traveling wave drive |
| EP04007664A EP1465331B1 (en) | 2003-03-31 | 2004-03-30 | Control apparatus and method for low-speed driving of traveling wave driving apparatus |
| CNB2004100306028A CN100571014C (en) | 2003-03-31 | 2004-03-30 | The control device of vibrating driver and control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004081135A JP4208753B2 (en) | 2004-03-19 | 2004-03-19 | Control device for vibration type drive device, control method for vibration type drive device, control program for vibration type drive device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005269821A JP2005269821A (en) | 2005-09-29 |
| JP2005269821A5 JP2005269821A5 (en) | 2007-05-10 |
| JP4208753B2 true JP4208753B2 (en) | 2009-01-14 |
Family
ID=35093772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004081135A Expired - Fee Related JP4208753B2 (en) | 2003-03-31 | 2004-03-19 | Control device for vibration type drive device, control method for vibration type drive device, control program for vibration type drive device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4208753B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5159197B2 (en) | 2007-07-25 | 2013-03-06 | キヤノン株式会社 | Liquid control device |
| JP5283992B2 (en) * | 2008-06-30 | 2013-09-04 | キヤノン株式会社 | Vibration type motor control device and optical apparatus using the same |
| JP6091316B2 (en) * | 2013-04-24 | 2017-03-08 | キヤノン株式会社 | Speed control mechanism of vibration type drive device, vibration type drive device, electronic apparatus, and speed control method |
| JP6291309B2 (en) * | 2014-03-27 | 2018-03-14 | 株式会社フコク | Control device and control method for vibration actuator |
-
2004
- 2004-03-19 JP JP2004081135A patent/JP4208753B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005269821A (en) | 2005-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5506552B2 (en) | Control device for vibration actuator and control method for vibration actuator | |
| EP1465331B1 (en) | Control apparatus and method for low-speed driving of traveling wave driving apparatus | |
| JP5343322B2 (en) | Drive device for vibration actuator, lens barrel and camera | |
| JP4838567B2 (en) | Frequency control circuit, motor drive device, frequency control method, motor drive device control method, and program for causing computer to execute control method | |
| JP2003319668A (en) | Oscillating wave driving device and driving circuit thereof | |
| JP2009017636A (en) | Method of driving ultrasonic motor | |
| JP2007074829A (en) | Vibration actuator | |
| JP4208753B2 (en) | Control device for vibration type drive device, control method for vibration type drive device, control program for vibration type drive device | |
| CN109417357B (en) | Vibration wave motor and optical apparatus | |
| JP5704892B2 (en) | Vibration type driving device | |
| JP4208627B2 (en) | Control device, operation device, and control method for vibration type drive device | |
| JP2008295269A (en) | Drive control unit for vibration motor | |
| JP5843911B2 (en) | Device and driving method of vibration actuator | |
| JP2002165469A (en) | Piezo-electric actuator | |
| JP5885380B2 (en) | Drive control device and drive control method for vibration wave drive device | |
| JP4594034B2 (en) | Vibration type driving device, its control device and its control method | |
| JP2012100482A (en) | Vibration type drive device | |
| JP5621662B2 (en) | Piezoelectric motor control method and piezoelectric motor | |
| JP2010141949A (en) | Oscillatory wave drive device | |
| JP2699299B2 (en) | Ultrasonic motor drive circuit | |
| JP4654583B2 (en) | Vibration wave motor | |
| JP5188062B2 (en) | Vibration type actuator and control method thereof | |
| JPH0681523B2 (en) | Vibration wave motor | |
| JPH01264579A (en) | Control method of progressive-wave type ultrasonic motor | |
| JP2699298B2 (en) | Ultrasonic motor drive circuit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070316 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080930 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081021 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111031 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111031 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121031 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131031 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |