JP4162000B2 - Yarn length measuring device for yarn winding device - Google Patents
Yarn length measuring device for yarn winding device Download PDFInfo
- Publication number
- JP4162000B2 JP4162000B2 JP2005335376A JP2005335376A JP4162000B2 JP 4162000 B2 JP4162000 B2 JP 4162000B2 JP 2005335376 A JP2005335376 A JP 2005335376A JP 2005335376 A JP2005335376 A JP 2005335376A JP 4162000 B2 JP4162000 B2 JP 4162000B2
- Authority
- JP
- Japan
- Prior art keywords
- yarn
- winding
- traverse
- bobbin
- movement distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004804 winding Methods 0.000 title claims description 191
- 238000005070 sampling Methods 0.000 claims description 28
- 230000002093 peripheral effect Effects 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 15
- 230000007547 defect Effects 0.000 description 11
- 238000005259 measurement Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 4
- 239000013598 vector Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 241001290864 Schoenoplectus Species 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H61/00—Applications of devices for metering predetermined lengths of running material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H63/00—Warning or safety devices, e.g. automatic fault detectors, stop-motions ; Quality control of the package
- B65H63/08—Warning or safety devices, e.g. automatic fault detectors, stop-motions ; Quality control of the package responsive to delivery of a measured length of material, completion of winding of a package, or filling of a receptacle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/31—Textiles threads or artificial strands of filaments
Landscapes
- Engineering & Computer Science (AREA)
- Quality & Reliability (AREA)
- Filamentary Materials, Packages, And Safety Devices Therefor (AREA)
- Winding Filamentary Materials (AREA)
Description
本発明は、糸を巻取ボビンに綾振りしながら巻き取る糸巻取装置の糸長測定装置に関する。 The present invention relates to a yarn length measuring device for a yarn winding device that winds a yarn while traversing it on a winding bobbin.
この種の糸長測定装置に関し、特許文献1には、綾振ドラム式の糸巻取装置(自動ワインダ)において、綾振ドラムのドラム回転検出器が発生する検出パルスを定長カウンタで計数して糸長を測定する構成の糸長測定装置が開示されている。
一方、特許文献2は、巻取ボビン回転駆動装置とトラバース装置とが互いに独立して駆動する糸巻取装置(自動ワインダ)を開示する。特許文献2では、このように巻取ボビン回転駆動装置と綾振りのための駆動装置とを独立させることで、プレシジョンワインディングやステッププレシジョンワインディング等の形式の綾巻ボビンを製造できることが開示されている。また特許文献2は、巻取ボビンを巻取ボビン回転駆動装置の回転子に相対回動不能に結合する、所謂巻取ボビンダイレクトドライブ方式の構成を開示している。
上記特許文献2の構成は、巻取ボビンとトラバース糸案内部を独立のモータで駆動しているので、上記の多種多様な巻き方が可能な点で有利であるが、特許文献2の巻取装置には特許文献1の糸長測定装置を適用することができない。つまり、特許文献1のように糸層と接触するローラの回転を検出するだけでは、それと独立して綾振りされるトラバース成分を加味した糸長測定が不可能である。
The configuration of
本発明は以上の事情に鑑みてされたものであり、その主要な目的は、トラバース装置が巻取ボビン回転駆動装置とは切り離されて駆動するタイプの糸巻取装置に好適な糸長測定装置を提供することにある。 The present invention has been made in view of the above circumstances, and its main object is to provide a yarn length measuring device suitable for a yarn winding device of a type in which a traverse device is driven separately from a winding bobbin rotation driving device. It is to provide.
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。 The problems to be solved by the present invention are as described above. Next, means for solving the problems and the effects thereof will be described.
本発明の第1の観点によれば、糸を巻き取るための巻取ボビンを回転駆動するための巻取ボビン回転駆動装置と、この巻取ボビン回転駆動装置とは切り離されて駆動し、前記巻取ボビンへの糸の巻取りの際にその糸を綾振るためのトラバース装置とを備えた糸巻取装置における、前記巻取ボビンに巻き取った糸の巻取長さを測定するための糸長測定装置において、以下のような構成が提供される。前記巻取ボビンに糸を巻き取って形成した糸層の周面の周方向の糸層周面移動距離を所定のサンプリング周期時間毎に検出する手段と、前記糸層の幅方向の糸のトラバース移動距離を所定のサンプリング周期時間毎に検出する手段と、前記糸層周面移動距離検出手段で所定のサンプリング周期時間毎に検出された糸層周面移動距離及び前記トラバース移動距離検出手段で所定のサンプリング周期時間毎に検出されたトラバース移動距離をそれぞれ入力し、入力された糸層周面移動距離及びトラバース移動距離から、前記巻取ボビンに巻き取った糸の巻取長さを求める巻取長さ演算手段と、を備えた。 According to the first aspect of the present invention, the winding bobbin rotation driving device for rotationally driving the winding bobbin for winding the yarn and the winding bobbin rotation driving device are separated and driven, Yarn for measuring the winding length of the yarn wound around the winding bobbin in a yarn winding device provided with a traverse device for traversing the yarn when winding the yarn on the winding bobbin In the length measuring device, the following configuration is provided. Means for detecting the circumferential movement distance of the circumferential surface of the yarn layer formed by winding the yarn on the winding bobbin at every predetermined sampling period; and traverse of the yarn in the width direction of the yarn layer A means for detecting a moving distance every predetermined sampling cycle time; a yarn layer peripheral surface moving distance detected by the yarn layer peripheral surface moving distance detecting means; and a predetermined value by the traverse moving distance detecting means. type traversing movement distance detected for each sampling period time, respectively, from the input yarn layer peripheral surface movement distance and the traverse movement distance, determined Me a winding length of the wound yarn previously Kimakito bobbin Winding length calculating means.
これにより、巻取ボビン回転駆動とトラバース駆動とが独立して行われるタイプの糸巻取装置において、糸の巻取長さを精度良く測定することができる。 Thereby, in the yarn winding device of the type in which the winding bobbin rotation driving and the traverse driving are performed independently, the winding length of the yarn can be accurately measured.
前記の糸巻取装置の糸長測定装置においては、前記所定のサンプリング周期時間が瞬間の時間であることが好ましい。ここで、「瞬間の時間」とは、トラバース装置が1トラバースストローク分移動する時間よりも十分短い微小時間をいい、具体的には1秒以下の時間をいう。 In the yarn length measuring device of the yarn winding device, it is preferable that the predetermined sampling cycle time is an instantaneous time. Here, “instantaneous time” refers to a minute time that is sufficiently shorter than the time required for the traverse device to move by one traverse stroke, and specifically refers to a time of 1 second or less.
これにより、糸長測定の精度をより向上させることができる。即ち、1トラバースストローク内でトラバース移動速度が変化しても、糸長を精度良く測定できる。また、巻取ボビン回転速度やトラバース移動速度の種々の変動に対応しつつ、正確に糸長を測定できる。 Thereby, the precision of yarn length measurement can be further improved. That is, the yarn length can be accurately measured even if the traverse moving speed changes within one traverse stroke. In addition, the yarn length can be accurately measured while dealing with various fluctuations in the winding bobbin rotation speed and traverse movement speed.
前記の糸巻取装置の糸長測定装置においては、前記トラバース装置が、糸をトラバース方向に移動させるために駆動されるトラバースガイドと、そのトラバースガイドを駆動するための駆動モータとを備え、この駆動モータの回転角度と前記トラバースガイドの移動距離とが所定の関係を維持していて、前記トラバース移動距離検出手段が前記駆動モータの回転角度を検出することが好ましい。 In the yarn length measuring device of the yarn winding device, the traverse device includes a traverse guide that is driven to move the yarn in the traverse direction, and a drive motor that drives the traverse guide. It is preferable that the rotation angle of the motor and the movement distance of the traverse guide maintain a predetermined relationship, and the traverse movement distance detection means detects the rotation angle of the drive motor.
これにより、前記トラバース移動距離を簡単な構成で精度良く検出することができる。 As a result, the traverse movement distance can be accurately detected with a simple configuration.
前記の糸巻取装置の糸長測定装置においては、前記糸層周面移動距離検出手段が、前記糸層の径を検出する糸層径センサと、前記巻取ボビンの回転角度を検出する巻取ボビン回転角度センサとを備え、前記糸層径センサ及び前記巻取ボビン回転角度センサの検出結果から前記糸層周面移動距離を求めるものであることが好ましい。 In the yarn length measuring device of the yarn winding device, the yarn layer peripheral surface moving distance detecting means detects a rotation angle of the yarn layer diameter sensor that detects the diameter of the yarn layer and the winding bobbin. It is preferable that a bobbin rotation angle sensor is provided, and the yarn layer circumferential surface movement distance is obtained from detection results of the yarn layer diameter sensor and the winding bobbin rotation angle sensor.
これにより、糸長の測定を正確に行える。即ち、上記特許文献1のように糸層と接触するローラの回転角度を検出する方式では、糸層とローラとの間にすべりが生じることがあるので、糸長の測定値が不正確になってしまいやすい。この点、本構成のように糸層周面移動距離検出手段を糸層径センサと巻取ボビン回転角度センサとで構成することで、正確に糸長を測定することができる。
As a result, the yarn length can be accurately measured. That is, in the method of detecting the rotation angle of the roller in contact with the yarn layer as described in
前記の糸巻取装置の糸長測定装置においては、前記糸層径センサが、糸の巻取を停止している状態で糸層径の検出が可能なものであることが好ましい。 In the yarn length measuring device of the yarn winding device, the yarn layer diameter sensor is preferably capable of detecting the yarn layer diameter in a state where the winding of the yarn is stopped.
これにより、糸の巻取を開始した直後から糸長の測定が可能になるので、糸の巻取長さを正確に測定できる。また、糸層径センサとして巻取ボビン回転角度センサとローラ回転角度センサとで構成して両センサの信号から糸層径を演算する構成は、糸の巻取を開始した後の巻取ボビン及びローラの回転速度が低速の時には、単位時間当たりの両センサからの信号数(パルス数)が少なく、演算手段での演算処理が困難であるが、本構成では糸層径センサが糸の巻取を停止している状態で糸層径の検出が可能なものであるので、巻取ボビンの回転速度が低速の時にも糸層径を検出することができる。特に、このような構成とすることは、糸巻取が糸欠点除去装置(糸欠点検出器、糸継装置等)を備え、糸欠点の検出、糸巻取の停止、糸欠点の除去、糸継ぎ、糸巻取の再開を糸巻取中に繰返す構成の糸巻取装置において有効である。 As a result, the yarn length can be measured immediately after starting the winding of the yarn, so that the winding length of the yarn can be accurately measured. Further, a configuration in which a yarn bobbin rotation angle sensor and a roller rotation angle sensor are used as a yarn layer diameter sensor and the yarn layer diameter is calculated from the signals of both sensors is a winding bobbin after starting the yarn winding, When the rotation speed of the roller is low, the number of signals (number of pulses) from both sensors per unit time is small and the calculation processing by the calculation means is difficult. However, in this configuration, the yarn layer diameter sensor is used for winding the yarn. Therefore, the yarn layer diameter can be detected even when the rotational speed of the winding bobbin is low. In particular, with such a configuration, the yarn winding is equipped with a yarn defect removing device (yarn defect detector, yarn joining device, etc.), yarn defect detection, yarn winding stop, yarn defect removal, yarn joining, This is effective in a yarn winding device configured to repeat the resumption of yarn winding during yarn winding.
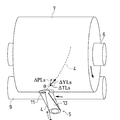
次に、発明の実施の形態を説明する。図1は本発明の一実施形態に係る自動ワインダの糸巻取ユニットを示す正面模式図である。図2はサンプリング周期時間Tsにおける糸の巻取長さΔYLsの演算を説明する要部斜視図である。 Next, embodiments of the invention will be described. FIG. 1 is a schematic front view showing a yarn winding unit of an automatic winder according to an embodiment of the present invention. FIG. 2 is a perspective view of a main part for explaining the calculation of the yarn winding length ΔYLs at the sampling cycle time Ts.
最初に図1に基づいて、自動ワインダ1の糸巻取ユニット(糸巻取装置)2を説明する。この糸巻取ユニット2は、給糸ボビン3の糸4をトラバース装置5でトラバースさせながら巻取チューブ6に巻き取って糸層を形成し、所定長で所定形状のパッケージ7を形成するものである。図1では糸巻取ユニット2を1台しか図示していないが、このような糸巻取ユニット2が図略の機台上に多数列設されることで、自動ワインダ1が構成されている。なお本明細書では、巻取チューブ6及びパッケージ7を総称して巻取ボビンと呼ぶ。即ち、糸層が形成されていない巻取ボビンが巻取チューブ6であり、糸層が形成された巻取ボビンがパッケージ7である。
First, the yarn winding unit (yarn winding device) 2 of the
糸巻取ユニット2は、前記巻取チューブ6を着脱可能に支持するクレードル(巻取ボビン支持部材)8と、前記パッケージ7の糸層の周面に接触して従動回転可能な接触ローラ9と、を備えている。前記クレードル8は、前記巻取チューブ6の両端を挟持して回転自在に支持できるように構成されている。また、このクレードル8は揺動軸10を中心に傾動自在に構成されており、巻取チューブ6への糸4の巻取りに伴う巻太り(糸層の径の増大)を、クレードル8が揺動することによって吸収できるように構成されている。
The
前記クレードル8の巻取チューブ6を挟持する部分にはパッケージ駆動モータ(巻取ボビン回転駆動装置)41が取り付けられており、このパッケージ駆動モータ41により巻取チューブ6を積極的に回転駆動して糸4を巻き取るように構成されている。パッケージ駆動モータ41のモータ軸は、巻取チューブ6をクレードル8に把持させたときに、当該巻取チューブ6と相対回転不能に連結されるようになっている(いわゆるダイレクトドライブ方式)。このパッケージ駆動モータ41の作動はパッケージ駆動制御部42により制御され、このパッケージ駆動制御部42はユニット制御部50からの信号を受けて前記パッケージ駆動モータ41の運転/停止を制御するように構成している。
A package drive motor (winding bobbin rotation driving device) 41 is attached to a portion of the
また、前記クレードル8にはパッケージ回転センサ(巻取ボビン回転角度センサ)43が取り付けられており、このパッケージ回転センサ43は、クレードル8に取り付けられた巻取ボビン(巻取チューブ6、パッケージ7)の回転角度(巻取ボビンが何回転したか)を検出するように構成している。この巻取ボビン6,7の回転角度検出信号は、パッケージ回転センサ43から、前記パッケージ駆動制御部42や前記ユニット制御部50へ送信される。更に、前記回転角度検出信号は、後述するトラバース制御部46へも入力される。
Further, a package rotation sensor (winding bobbin rotation angle sensor) 43 is attached to the
また、前記クレードル8にはロータリエンコーダ等からなるパッケージ径センサ(糸層径センサ)44が取り付けられており、このパッケージ径センサ44は、クレードル8に取り付けられた巻取チューブ6に糸4を巻き取って形成される糸層(パッケージ7)の径を、クレードル8の揺動角を検出することで検出できるように構成されている。このパッケージ径センサ44は、糸4を巻き取っている時にも糸4の巻取を停止している時にも糸層の径の検出が可能なものである。パッケージ径センサ44で取得された糸層の径は、ユニット制御部50へ送信される。なお、パッケージ回転センサ43とパッケージ径センサ44とは、巻取チューブ6に糸4を巻き取って形成した糸層の周面の周方向の糸層周面移動距離を検出する糸層周面移動距離検出手段の構成要素である。
Further, a package diameter sensor (yarn layer diameter sensor) 44 composed of a rotary encoder or the like is attached to the
また、前記接触ローラ9の近傍には前記トラバース装置5が設けられており、このトラバース装置5によって、糸4が綾振りされながらパッケージ7に巻き取られるようになっている。このトラバース装置5は、トラバース方向に往復移動自在に設けられたトラバースガイド(糸ガイド)11と、このトラバースガイド11を往復駆動するトラバース駆動モータ45と、を備えている。
Further, the
前記トラバース装置5は、支軸まわりに旋回可能に構成した細長状のアーム部材13の先端に前記トラバースガイド11をフック状に設けるとともに、このアーム部材13を前記トラバース駆動モータ45により図1の矢印のように往復旋回駆動させる構成になっている。本実施形態において前記トラバース駆動モータ45はボイスコイルモータで構成されている。
The
このトラバース駆動モータ45の作動はトラバース制御部46により制御され、このトラバース制御部46はユニット制御部50からの運転信号を受けて前記トラバース駆動モータ45の運転/停止を制御するように構成している。また、トラバース装置5はロータリエンコーダ等からなるトラバースガイド位置センサ47を備えており、アーム部材13の旋回位置(ひいては、トラバースガイド11の位置)を検出して、位置信号を前記トラバース制御部46へ送信できるように構成されている。トラバースガイド位置センサ47は、トラバース移動距離検出手段の構成要素である。
The operation of the
なお、本実施形態では図1に示すように、巻取ボビン6,7を駆動するパッケージ駆動モータ41と、トラバースガイド11を駆動するトラバース駆動モータ45とは、別々に設けられており、巻取ボビン6,7とトラバースガイド11とは別個独立に駆動(制御)されるように構成されている。これにより、巻取ボビン6,7への糸4の巻取りの際に、プレシジョン巻、ステッププレシジョン巻、ランダム巻等、多種多様な巻き方を実現することができる。
In this embodiment, as shown in FIG. 1, the
そして、前記糸巻取ユニット2は、給糸ボビン3と接触ローラ9との間の糸走行経路中に、給糸ボビン3側から順に、糸継装置14とヤーンクリアラ(糸監視器)15を配設した構成となっている。
The
糸継装置14は、ヤーンクリアラ15が糸欠陥を検出して行う糸切断時、又は給糸ボビン3からの糸解舒中の糸切れ時に、給糸ボビン3側の下糸と、パッケージ7側の上糸とを糸継ぎするように構成されている。
The
また、ヤーンクリアラ15は糸4の太さ欠陥を検出するためのものであって、ヤーンクリアラ15の部分を通過する糸4の太さを適宜のセンサで検出し、このセンサからの信号をアナライザ23で分析することで、スラブ等の糸欠陥を検出するように構成されている。このヤーンクリアラ15には、糸欠陥を検出した時に直ちに糸4を切断するためのカッタ16が付設されている。
The
糸継装置14の下側と上側には、給糸ボビン3側の下糸を吸引捕捉して案内する下糸捕捉案内手段17と、パッケージ7側の上糸を吸引捕捉して案内する上糸捕捉案内手段20が設けられている。上糸捕捉案内手段20はパイプ状に構成されており、軸21を中心に上下回動可能に設けられるとともに、その先端側にマウス22を設けている。同様に下糸捕捉案内手段17もパイプ状に構成されており、軸18を中心に上下回動可能に設けられるとともに、その先端側には吸引口19を設けている。上糸捕捉案内手段20及び下糸捕捉案内手段17には適宜の負圧源が接続されており、先端のマウス22及び吸引口19に吸引作用を生じさせるようになっている。
On the lower side and the upper side of the
以上が自動ワインダ1の構成であり、この自動ワインダ1の糸巻取ユニット2において糸4の巻始めからの巻取長さYLを測定する糸長測定装置60は、上記のパッケージ回転センサ43、パッケージ径センサ44、トラバースガイド位置センサ47、トラバース制御部46等を少なくとも含んで構成されている。
The above is the configuration of the
次に、糸長測定装置60における糸長測定機能を説明する。この糸長測定装置60を構成する前記トラバース制御部46はマイクロコンピュータ式に構成されて、演算手段としてのCPU70や、記憶手段としてのRAM71、タイマ回路72等を備えている。CPU70は、糸層周面移動距離演算手段73とトラバース移動距離演算手段74と巻取長さ演算手段75とを備えている。糸層周面移動距離演算手段73は、糸層周面移動距離検出手段の構成要素であり、パッケージ回転センサ43からの検出結果とパッケージ径センサ44の検出結果とから、所定のサンプリング周期時間Ts毎の糸層周面の移動距離ΔPLsを演算する。トラバース移動距離演算手段74は、トラバース移動距離検出手段の構成要素であり、トラバースガイド位置センサ47の検出結果から所定のサンプリング周期時間Ts毎のトラバース移動距離ΔTLsを演算する。巻取長さ演算手段75は、糸層周面移動距離演算手段73で所定のサンプリング周期時間Ts毎に検出された糸層周面移動距離ΔPLsとトラバース移動距離演算手段74で所定のサンプリング周期時間Ts毎に検出されたトラバース移動距離ΔTLsをそれぞれ入力し、入力された糸層周面移動距離ΔPLs及びトラバース移動距離ΔTLsから、所定の周期時間Tsごとに巻取ボビン6,7に巻き取った糸4の巻取長さを計算し、所定時間Tsごとに計算された巻取長さを巻始めから積算して、巻取ボビン6,7に巻き取った糸4の巻取長さを求めるものである。そしてトラバース制御部46のCPU70は、所定のサンプリング周期時間Tsごとに、前記巻取ボビン6,7に巻き取られた糸層の周面の移動距離ΔPLsと、前記トラバースガイド11の移動距離ΔTLsとを演算している。前記のサンプリング周期時間Tsは、前記トラバースガイド11が1トラバースストローク分移動する時間よりも十分短い微小時間であり、短ければ短いほど良いが、例えば1秒以下(数百μs程度)の時間とされる。
Next, the yarn length measuring function in the yarn
具体的には、本実施形態において、パッケージ径センサ44はパッケージ7の径を適宜の時間間隔ごとに検出し、この検出された径はユニット制御部50へ送信される。ユニット制御部50は、パッケージ7の径の信号を受信すると、それをトラバース制御部46へ転送する。また、パッケージ回転センサ43は巻取ボビン6,7の回転角度(巻取ボビン6,7の回転速度)を適宜の時間間隔ごとに検出し、この検出された回転角度はトラバース制御部46へ送信される。
Specifically, in the present embodiment, the
上記によりトラバース制御部46はパッケージ(糸層)の径と巻取ボビン6,7の回転速度を取得することができ、これに基づいて、トラバース制御部46の糸層周面移動距離演算手段73は、当該サンプリング周期時間Tsにおける糸層の周面の移動距離ΔPLsを、以下の式に従って演算する。即ち、パッケージ7の直径をD(メートル)、巻取ボビン6,7の回転速度をB(rpm)、周期時間をTs(s)とすると、ΔPLs=(π×D×B×Ts)/60である。
As described above, the
同時に、前記トラバースガイド位置センサ47は、前記位置信号として、前記トラバースガイド11の移動距離に応じた数のパルス信号をトラバース制御部46へ適宜の時間間隔ごとに送信するように構成している。そしてトラバース制御部46のトラバース移動距離演算手段74は、今回入力された前記パルス信号の数と、前記サンプリング周期時間Tsだけ前に入力されたパルス信号の数との差を求め、これに1パルスあたりの距離を乗じることで、サンプリング周期時間Tsにおけるトラバースガイド11の移動距離ΔTLsを演算して取得する。即ち、今回のサンプリングにおけるパルス数をCc(個)、前回のサンプリングにおけるパルス数をCp(個)、1パルスあたりの距離をΔLp(メートル)とすると、ΔTLs=|Cc−Cp|×ΔLpである。
At the same time, the traverse
そしてトラバース制御部46の巻取長さ演算手段75は、上記の演算で得られたΔPLs、ΔTLsの値を、所定の周期時間(計算周期時間)Tcの間、積算してゆく。得られた積算値ΔPL、ΔTLは、それぞれ、ΔPL=ΣΔPLs、ΔTL=ΣΔTLsとなる。なお、前記の計算周期時間Tcは、前記のサンプリング周期時間Tsよりも長い時間に設定されている。
Then, the winding length calculation means 75 of the
そして、前記の計算周期時間Tcが経過すると、トラバース制御部46の巻取長さ演算手段75は、当該計算周期時間Tc中に巻き取られた糸4の長さΔYLを、前記の積算値ΔPL、ΔTLをもとに、三平方の定理の式に従って計算する。即ち、計算周期時間Tc中に巻き取られた糸の長さをΔYL(メートル)とすると、ΔYL=√(ΔPL2+ΔTL2)である。
When the calculation cycle time Tc elapses, the winding length calculation means 75 of the
即ち、図2に示すように、十分に短い時間Tcでの糸の巻取長さを表すベクトル(ΔYL)は、糸層の周面の移動する方向の成分のベクトル(ΔPL)と、それに垂直なトラバース移動の成分のベクトル(ΔTL)のベクトル和として表される。従って、ΔYL=√(ΔPL2+ΔTL2)の関係が成り立つ。なお、図2に示す角度θは綾角である。 That is, as shown in FIG. 2, the vector (ΔYL) representing the winding length of the yarn at a sufficiently short time Tc is perpendicular to the vector (ΔPL) of the component in the moving direction of the circumferential surface of the yarn layer. This is expressed as a vector sum of the vectors (ΔTL) of components of a traverse movement. Therefore, the relationship ΔYL = √ (ΔPL 2 + ΔTL 2 ) is established. 2 is a twill angle.
なお、本実施形態においてトラバースガイド11は旋回駆動されるアーム部材13の先端に設けられているので、厳密にはトラバースガイド11は直線状の軌跡ではなく円弧状の軌跡を描いて運動する。この点、本実施形態ではアーム部材13の長さが十分に長いものであるとして、トラバースガイド11が近似的に直線運動をするものとして上記の計算式を適用している。ただし、上記の近似を行うことに限定されず、トラバースガイド11の移動距離ΔTLの前記糸層の幅方向の成分(糸4の綾振運動に実質的に寄与する成分距離)ΔTL’を三角関数を使って演算し、こうして得られた距離ΔTL’を用いて前記の三平方の定理の式からΔYLを計算するようにしても良い。
In the present embodiment, since the
上記のように、計算周期時間Tcごとの巻取長さΔYLが演算により取得されると、トラバース制御部46の巻取長さ演算手段75は、巻取ボビン6,7への巻取り始めからの巻取長さYLを、積算値として求める。即ち、YL=ΣΔYLである。そしてトラバース制御部46の巻取長さ演算手段75は、前述の積算値ΔPL、ΔTLをそれぞれゼロにリセットし、次の計算周期時間Tcでの処理に移行して、前記と同様の処理を反復する。
As described above, when the winding length ΔYL for each calculation cycle time Tc is obtained by calculation, the winding length calculation means 75 of the
トラバース制御部46の巻取長さ演算手段75は計算周期時間Tcごとに上記の計算を繰り返して、巻取り始めからの巻取長さYLの値を更新するので、糸巻取ユニット2での巻取りが進むにつれて、巻取長さYLは刻々と増大していく。そして、巻取長さYLの値が予め設定された所定長さに到達すると、巻取長さ演算手段75は満巻であると判定し、ユニット制御部50へ満巻信号を送る。そして、ユニット制御部50はパッケージ駆動制御部42やトラバース制御部46に停止信号を送ってパッケージ駆動モータ41及びトラバース駆動モータ45を停止させ、巻取ボビン6,7への糸4の巻取りを停止させるとともに、図示しない玉揚装置に適宜の玉揚動作を行わせる。その後、パッケージ駆動制御部42やトラバース制御部46を介してパッケージ駆動モータ41及びトラバース駆動モータ45の運転を再開し、新しい巻取ボビン(巻取チューブ)6に糸4を再び巻き付けていく。なお、新しい巻取ボビン6に糸を巻き取る際は、前記巻取長さYLの測定値がゼロにリセットされるのは勿論である。
The winding length calculating means 75 of the
以上に示すように、本実施形態の糸長測定装置60は、所定のサンプリング周期時間Tsにおける、前記巻取ボビン6,7に巻き取られた糸層の周面の移動距離ΔPLsと、前記トラバースガイド11の移動距離ΔTLsとから、前記サンプリング周期時間Tsにおける糸4の巻取長さΔYLsを演算して求める巻取長さ演算手段75を備えている。そして、この巻取長さ演算手段75は、前記サンプリング周期時間Tsごとに繰返し求められた前記巻取長さΔYLsを積算することで、巻始めからの糸4の巻取長さYLを求めるように構成している。
As described above, the yarn
従って、巻取ボビン6,7の回転駆動とトラバースガイド11の駆動とが独立して行われる糸巻取装置において、巻取ボビン6,7の回転方向成分とトラバース方向成分とをそれぞれ加味した糸長測定を行うことができるので、糸長の測定精度が極めて良好であり、糸の巻取量の不足や糸の無駄を確実に防止できる。
Accordingly, in the yarn winding device in which the rotation driving of the winding
また、トラバース制御部46の巻取長さ演算手段75が前記巻取長さΔYLsを演算する周期時間Tsは、前記トラバースガイド11が1トラバースストローク分移動するのに必要な時間より短い長さ(十分短い瞬間の時間)に設定されている。従って、トラバースガイド11がトラバースストローク端部に向かうにつれて減速し、その端部で一瞬停止した後、反対側のトラバースストローク端部へ向かって加速するといった、トラバースガイド11の往復運動が与える影響(換言すれば、ΔTLsの変化)をキメ細かく反映させつつ巻取長さYLの値を求めることができる。従って、糸長測定の精度を大きく向上させることができる。また、同様に、巻取ボビン回転速度やトラバース移動速度の変化にも容易に対応することができる。
Further, the period time Ts for which the winding length calculating means 75 of the
また、本実施形態の自動ワインダ1の糸巻取ユニット2は、前記糸層の径を検出するパッケージ径センサ44と、前記糸層の回転角度を検出するパッケージ回転センサ43を備える。そして、トラバース制御部46の巻取長さ演算手段75は、前記パッケージ径センサ44の検出値と前記パッケージ回転センサ43の検出値とから、前記サンプリング周期時間Tsにおける糸層の周面の移動距離ΔPLsを演算して求めている。なお、接触ローラ9に回転センサを取り付ける方式でも前記周面の移動距離ΔPLsを求めることは可能であるが、この方式では糸層と接触ローラ9との間にすべりが生じることがあるので、糸長の測定値が不正確になってしまいやすい。この点、本実施形態では上記のように糸層周面移動距離検出手段をパッケージ径センサ44とパッケージ回転センサ43とで構成することで、正確に糸長を測定することができる。
Further, the
また、本実施形態においてトラバース装置5は、糸4をトラバース方向に移動させるために駆動されるトラバースガイド11と、そのトラバースガイド11を駆動するためのトラバース駆動モータ45とを備え、このトラバース駆動モータ45の回転角度と前記トラバースガイド11の移動距離とが比例の関係になっている。そして、トラバースガイド位置センサ47は、このトラバース駆動モータ45の回転角度を検出するように構成している。従って、トラバースガイド11の移動距離ΔTLsを簡単な構成で精度良く検出することができる。
In the present embodiment, the
また、本実施形態においてパッケージ径センサ44は、糸4の巻取を停止している状態でも糸層径の検出が可能に構成されている。従って、空の巻取ボビンへの糸の巻取開始直後や糸継後の巻取再開直後のように巻取ボビン6,7が低速で回転しているときにも、パッケージ径センサ44で糸層径を測定することができ、正確に糸長を測定することができる。
In the present embodiment, the
なお、例えば、パッケージ径センサ44を省略する代わりに接触ローラ9に回転センサを取り付け、この回転センサのパルス信号とパッケージ回転センサ43のパルス信号からCPU70等で糸層径を演算することも可能である。しかしながら、このように回転速度の関係から糸層径を演算する場合、糸巻取開始直後等の巻取ボビンが低速で回転している時は単位時間当たりのパルス数が少ないために、CPU70での演算処理が困難になってしまう。この点、本実施形態の構成では、巻取ボビンの低速回転時でもパッケージ径センサ44によって正確に糸層径を取得できるので、糸長を正確に測定することができる。特に本実施形態のような自動ワインダ1の糸巻取ユニット2では、ヤーンクリアラ15が糸欠点を検出する毎に巻取ボビン6,7の回転を停止し、当該糸欠点を除去して糸継装置14による糸継後に巻取ボビン6,7の回転を再開する動作を繰返すので、上記のように巻取ボビン停止時でも糸層径を検出可能なパッケージ径センサ44を採用することが有利である。
For example, instead of omitting the
また、本実施形態の自動ワインダ1の糸巻取ユニット2は、前記の糸長測定装置60で測定された巻取始めからの巻取長さYLが予め設定された長さに到達すると前記巻取ボビン6,7への巻取りを停止するように構成されている。これにより、糸4の巻取長さYLを正確に測定しながら定長巻取りを行うことが可能であり、糸4の巻取量の不足したパッケージ7を形成したり、パッケージ7に糸4を巻き過ぎて糸4を無駄にすること等を防止できる。
Further, the
なお、上記に開示された構成は一例であって、例えば以下のように変更することができる。 The configuration disclosed above is an example, and can be changed as follows, for example.
トラバース装置5は、ボイスコイルモータに構成したトラバース駆動モータ45によってアーム部材13を旋回往復駆動させる構成に代えて、図3に示すように、接触ローラ9の近傍に無端状のタイミングベルト31を配置し、このタイミングベルト31にトラバースガイド11’を取り付けるとともに、当該タイミングベルト31を、例えばパルスモータとしてのトラバース駆動モータ45’によって往復駆動する構成に変更することができる。また、ドラム状のトラバースカムの外周面にカム溝を螺旋状に設け、このカム溝にトラバースガイドを係合する構成等、他の構成のトラバース装置に変更することもできる。
The
パッケージ径センサ44が検出した径の信号は、ユニット制御部50を介してトラバース制御部46に転送される構成に代えて、トラバース制御部46に直接入力される構成に変更することができる。また、トラバース制御部46及び/又はパッケージ駆動制御部42をユニット制御部50に組み込むようにしても良い。
The diameter signal detected by the
糸の巻取長さ(ΔYLs,ΔYL,YL)を、トラバース制御部46で演算せずに、例えばユニット制御部50で演算する構成に変更することができる。
The yarn winding length (ΔYLs , ΔYL, YL) can be changed to a configuration in which, for example, the
1 自動ワインダ
2 糸巻取ユニット(糸巻取装置)
4 糸
5 トラバース装置
6 巻取チューブ(空の巻取ボビン)
7 パッケージ(糸層付の巻取ボビン)
11 トラバースガイド
41 パッケージ駆動モータ(巻取ボビン回転駆動装置)
43 パッケージ回転センサ(巻取ボビン回転角度センサ)
44 パッケージ径センサ(糸層径センサ)
46 トラバース制御部
47 トラバースガイド位置センサ
50 ユニット制御部
60 糸長測定装置
73 糸層周面移動距離演算手段
74 トラバース移動距離演算手段
75 巻取長さ演算手段
1
4
7 Package (winding bobbin with thread layer)
11
43 Package rotation sensor (winding bobbin rotation angle sensor)
44 Package diameter sensor (yarn layer diameter sensor)
46
Claims (5)
前記巻取ボビンに糸を巻き取って形成した糸層の周面の周方向の糸層周面移動距離を所定のサンプリング周期時間毎に検出する手段と、
前記糸層の幅方向の糸のトラバース移動距離を所定のサンプリング周期時間毎に検出する手段と、
前記糸層周面移動距離検出手段で所定のサンプリング周期時間毎に検出された糸層周面移動距離及び前記トラバース移動距離検出手段で所定のサンプリング周期時間毎に検出されたトラバース移動距離をそれぞれ入力し、入力された糸層周面移動距離及びトラバース移動距離から、前記巻取ボビンに巻き取った糸の巻取長さを求める巻取長さ演算手段と、
を備えたことを特徴とする、糸巻取装置の糸長測定装置。 A take-up bobbin rotation drive device for rotationally driving a take-up bobbin for winding the yarn and the take-up bobbin rotation drive device are separated from each other and driven to wind the yarn onto the take-up bobbin. A yarn length measuring device for measuring a winding length of a yarn wound around the winding bobbin in a yarn winding device provided with a traverse device for traversing the yarn,
Means for detecting a thread layer peripheral surface movement distance in a circumferential direction of a peripheral surface of a thread layer formed by winding a thread on the winding bobbin for each predetermined sampling period time ;
Means for detecting the traverse movement distance of the yarn in the width direction of the yarn layer for each predetermined sampling period time ;
Each input predetermined yarn layer peripheral surface movement distance is detected for each sampling period time and the detected traverse movement distance for each predetermined sampling period time the traverse movement distance detecting means by said yarn layer peripheral surface movement distance detecting means and, from the input yarn layer peripheral surface movement distance and the traverse movement distance, and the winding length of the wound yarn previously Kimakito bobbin determined Mel winding length computing means,
A yarn length measuring device for a yarn winding device.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005335376A JP4162000B2 (en) | 2005-11-21 | 2005-11-21 | Yarn length measuring device for yarn winding device |
| EP20060024153 EP1787935B1 (en) | 2005-11-21 | 2006-11-21 | A yarn length measuring device for a yarn winding device |
| DE200660004537 DE602006004537D1 (en) | 2005-11-21 | 2006-11-21 | Device for measuring the thread length for a thread take-up device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005335376A JP4162000B2 (en) | 2005-11-21 | 2005-11-21 | Yarn length measuring device for yarn winding device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007137615A JP2007137615A (en) | 2007-06-07 |
| JP4162000B2 true JP4162000B2 (en) | 2008-10-08 |
Family
ID=37696431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005335376A Expired - Fee Related JP4162000B2 (en) | 2005-11-21 | 2005-11-21 | Yarn length measuring device for yarn winding device |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1787935B1 (en) |
| JP (1) | JP4162000B2 (en) |
| DE (1) | DE602006004537D1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4523053B2 (en) | 2008-07-18 | 2010-08-11 | Tmtマシナリー株式会社 | Yarn winding machine |
| CN104670997B (en) * | 2015-01-27 | 2017-04-12 | 杭州航海仪器有限公司 | Method for changing position folding line of movable rail seat on winch screw into straight line |
| CN115258822B (en) * | 2022-07-26 | 2023-08-11 | 青岛宏大纺织机械有限责任公司 | Single spindle winding length counting method of winder and automatic winder |
| CN117163768A (en) * | 2023-09-14 | 2023-12-05 | 张家口原轼新型材料股份有限公司 | Diamond wire saw winding machine and wire arrangement detection method |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1495003A (en) * | 1974-08-14 | 1977-12-14 | Kdg Instr Ltd | Method and apparatus for measuring length |
| CH663402A5 (en) * | 1981-12-04 | 1987-12-15 | Loepfe Ag Geb | METHOD FOR DETERMINING THE YARN LENGTH WINDED ON A CROSS REEL WITH FRICTION DRIVE BY A SLOT DRUM. |
| CH661587A5 (en) * | 1983-03-29 | 1987-07-31 | Loepfe Ag Geb | LENGTH MEASURING DEVICE FOR A THREAD ON A THREAD WINDING DEVICE. |
| CH668637A5 (en) * | 1984-10-12 | 1989-01-13 | Loepfe Ag Geb | Fadenlaengenmessung. |
| JPH05286646A (en) * | 1992-04-07 | 1993-11-02 | Murata Mach Ltd | Takeup stopping device of automatic winder |
| DE19908093A1 (en) * | 1999-02-25 | 2000-08-31 | Schlafhorst & Co W | Bobbin drive at a cross wound bobbin winding frame has an integrated pneumatic brake unit to move the stator housing with a brake lining against a braking surface on the rear of the bobbin holder plate |
| DE10342383A1 (en) * | 2003-09-13 | 2005-05-25 | Saurer Gmbh & Co. Kg | Method and device for non-contact determination of the speed of a running thread |
-
2005
- 2005-11-21 JP JP2005335376A patent/JP4162000B2/en not_active Expired - Fee Related
-
2006
- 2006-11-21 DE DE200660004537 patent/DE602006004537D1/en active Active
- 2006-11-21 EP EP20060024153 patent/EP1787935B1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP1787935B1 (en) | 2008-12-31 |
| DE602006004537D1 (en) | 2009-02-12 |
| EP1787935A1 (en) | 2007-05-23 |
| JP2007137615A (en) | 2007-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5126590B2 (en) | Yarn quality measuring instrument and yarn winding machine | |
| JP5614534B2 (en) | Yarn traveling information acquisition device and yarn winding machine | |
| CN104925584B (en) | Yarn winding machine and winding method | |
| JP2017014015A (en) | Method and apparatus for optimizing density of cross winding package manufactured in working unit for cross winding automatic winder | |
| JPH0192177A (en) | Method and device for determining yarn speed in a winder | |
| JP2009023785A (en) | Yarn winding device | |
| JP2010047406A (en) | Yarn winding device and automatic winder with the same | |
| JP2010047407A (en) | Yarn winding device and automatic winder with the same | |
| EP2690043B1 (en) | Driving state detecting device, winding unit, winding machine, spinning unit, and spinning machine | |
| JP2011105460A (en) | Yarn winder | |
| JP2012250810A (en) | Thread winder | |
| JP2010042904A (en) | Yarn winding machine | |
| JP4162000B2 (en) | Yarn length measuring device for yarn winding device | |
| EP1787936A2 (en) | Textile machine | |
| EP2690044B1 (en) | Yarn winding device | |
| CN111132918B (en) | Yarn winding machine | |
| JP2007145463A (en) | Yarn monitoring device of yarn winder | |
| JP2007137616A (en) | Thread speed detection device for thread winding device and thread traverse speed detection device for traversing device | |
| JP2013052997A (en) | Yarn winding machine | |
| JP2019137480A (en) | Yarn winder and yarn winding method | |
| JP2013067471A (en) | Yarn winding device | |
| JP2010013259A (en) | Yarn-winding machine and displacement control method of cradle | |
| KR100545039B1 (en) | How to calculate the length of bobbin wound wire | |
| JP2007153607A (en) | Textile machine | |
| JP2007153608A (en) | Winder |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080626 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080701 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080714 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110801 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120801 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130801 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |