JP3619059B2 - ヘミング用起振装置 - Google Patents
ヘミング用起振装置 Download PDFInfo
- Publication number
- JP3619059B2 JP3619059B2 JP17367099A JP17367099A JP3619059B2 JP 3619059 B2 JP3619059 B2 JP 3619059B2 JP 17367099 A JP17367099 A JP 17367099A JP 17367099 A JP17367099 A JP 17367099A JP 3619059 B2 JP3619059 B2 JP 3619059B2
- Authority
- JP
- Japan
- Prior art keywords
- hemming
- hem blade
- rotary
- vibration
- eccentric weights
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Description
【発明の属する技術分野】
ヘム刃を振動させて鋼板等にヘミング加工を施すことが行われている。ヘミング加工では、そのための起振装置に種々な改善が必要とされ、本発明はこのような技術分野に属している。
【0002】
【従来の技術】
本発明に関する従来技術としては、特開平10−249455号公報があげられる。ここに開示されている起振装置は、ロボット装置の先端部に結合されているもので、エアシリンダの往復出力が起振源とされている。そして、ロボット装置、すなわち多数の関節構造(一般的には6軸が多い)を有するアーム系に起振装置の振動が伝達され、その振動数とアーム系の固有振動数との共振を避けるために、調整ウエイトを取り付けると共に、エアシリンダの振幅方向に緩衝材を介挿している。
【0003】
【発明が解決しようとする課題】
上述のような技術には、次のような問題がある。起振源がエアシリンダであると、振動数をワークの特質に応じて自由に選定することが困難となる。これは、エアシリンダのピストンの両側に交互に空気圧を作用させるものであるために、空気給排時の流路抵抗や空気自体が圧縮性であること等が原因になって、振動制御に制約が生じ、とくに振動数を高めるときに問題となる。
【0004】
さらに、上述の共振を避けるために調整ウエイトを設置すると、起振装置の質量が大きくなって、ロボット装置の荷重負担が過大になり、そのためにアーム系を十分に強化する必要がでてくる。エアシリンダを採用している場合、ヘム刃乃至はそれと一体の部材の運動エネルギ−を高めるためには、振動数増大に限界があるので、振動する部材の質量を大きくすることしか方法がなく、この点においても質量が過大にならざるを得ない。このような事情で起振装置の質量が大きくなると、ロボットのアーム系に撓み現象が発生するので、ティーチングの際にはこの撓み量を見込んで挙動軌跡を設定する必要がある。このようなティーチング調整は何度も繰り返す必要があり、初期設定に著しく時間がかかってしまう。
【0005】
【課題を解決するための手段とその作用】
本発明は、以上に述べた問題点を解決するために提供されたもので、請求項1の発明は、ヘム刃に振動を付与して鋼板等のヘミング加工を行う形式のものにおいて、回転駆動手段の回転運動を直線方向の進退運動に変換してヘム刃を振動させるように構成したことを特徴としている。したがって、回転数を選定することによって、高い振動数も自由に設定できてワークの性質に応じた作動が可能となる。
【0006】
さらに、請求項1の発明は、回転駆動手段には回転軸に偏心ウエイトを取り付けた機構が含まれており、この偏心ウエイトによって得られる分力でヘム刃を振動させるように構成したことを特徴としている。したがって、偏心ウエイトの回転によって合成された往復成分によって、ヘム刃の振動がなされる。
【0008】
【発明の実施の形態】
以下、図示の実施形態にしたがって本発明をくわしく説明する。まず、図1から図3のものについて説明すると、符号1は6軸式ロボット装置のアームであり、その先端にヘミングユニット2が結合されている。アーム1には弾性体3が結合され、それと一体の支持板4に基板5が上下方向に固定されている。基板5の下部に軸受け支持板6が水平方向に結合され、2本の軸受け7、7がこの支持板6を貫通した状態で軸受け支持板6にしっかりと固定されている。
【0009】
ヘム刃8は支持ロッド9に固定されており、支持ロッド9にはガイドロッド10が固定されていて、このロッド10、10が軸受け7、7を貫通している。ガイドロッド10、10の上下にはそれぞれフランジ11、12が結合されており、フランジ11と軸受け支持板6との間に緩衝ばね13が、また、フランジ12と軸受け支持板6との間に緩衝ばね14が配置されている。軸受け7、7は円筒状の形であり、図示していないが、実際には多数の鋼球を配列したボウル式軸受けで支持されて、摩擦抵抗を低くして、しかも曲げモーメントに強い構造とされている。また、緩衝ばね13、14は図示のようなコイルスプリングでもよいが、ウレタンゴムであってもよい。また、前述の弾性体3もコイルスプリングあるいは図示のようなウレタンゴムであればよい。これらの弾性体3やコイルスプリング13、14は、ヘム刃8の衝撃反力がアーム1に伝達されるのを緩和しているのである。
【0010】
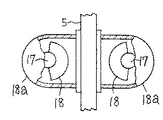
回転駆動手段15としては、電動モータや圧縮空気駆動式の回転装置など種々なものが採用できるが、ここでは電動モータの方式を採用している。電動モータ16、16が基板5の両側に左右対称の状態で結合され、その回転軸17、17に偏心ウエイト18、18が固定されている。図1から明らかなように電動モータ16に隣接させて収容ボックス18a、18aが配置され、その中に偏心ウエイト18、18が入っている。そして、図1と図2から理解できるように、偏心ウエイト18はガイドロッド10、10の真上に位置させてあり、こうすることによって軸受け7、7に作用する曲げ荷重を少なくしている。
【0011】
回転軸17、17は、一方が時計方向に、他方が反時計方向に回転するもので、偏心ウエイト18、18は図3のように相対向した位相関係にしてある。したがって、両偏心ウエイトの上下方向の成分は「和」として取り出されるが、他の方向の成分は打ち消されることになる。このような起振現象によって、上下方向の振動が基板5から軸受け支持板6、緩衝ばね13、14、フランジ11、12を経てヘム刃8に伝達されるのである。符号19は、自動車のドア周辺部を示しており、内板20に対して外板21が折り曲げられている。なお、図2のようにヘム刃8、8がタンデム型になっているが、これをシングル式にしてもよいことは勿論である。
【0012】
この実施形態によれば、偏心ウエイト18、18の合成振動を利用するものであるから、振動数を電動モータ16、16のの回転数設定によって自由に、しかも高い振動数を選ぶことが容易に可能となる。さらに、ここでは図示していないが、両偏心ウエイト18、18の位相をずらして振幅を変えることも可能となる。これらによって、ヘミング箇所の状態、たとえば伸びフランジ、縮みフランジ、曲げ剛性等に適応したヘム刃振動が得られる。
【0013】
以上のような特質によって、振動数を高めてアーム系との共振現象が完全に防止でき、前述の調整ウエイトを省くことが可能となる。したがって、ヘミングユニット2の質量を軽くすることができて、アーム系を強化したりティ−チング時に手間取るようなことが回避できる。
【0014】
上述の実施形態では、電動モータが2個装着されているものを示したが、これを電動モータ1個のタイプにしてもよい。こうするためには、電動モータの回転を2個のギヤに伝達し、このギヤの軸に偏心ウエイトを取り付ければよいのである。
【0015】
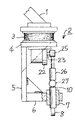
図4、図5の他の実施形態について説明する。先の実施形態における部材と同じ機能を果たすものについては、同符号を図中に記載して詳細な説明は省略してある。支持板4の下面に電動モータ16が固定され、その端部にギヤ変換機22が結合してある。ギヤ変換機22の出力軸23は、図5に示した円周24上を周回するもので、この円周24の直径は必要とする振幅に合わせて設定してある。出力軸23には自在継ぎ手25が取り付けられ、これにエアダンパ26が結合され、該ダンパ26はボールジョイント27を介してガイドロッド10に結合してある。なお、このエアダンパ26はテレスコピックな構造のものである。また、図4の二点鎖線図示の部材は、支持板4と基板5との結合剛性を高めるための補強用三角板である。
【0016】
電動モータ16の回転によって出力軸23が円周運動をすると、その変位はエアダンパ26、ボールジョイント27、ガイドロッド10を経てヘム刃8に伝えられ、ヘム刃振動が得られる。エアダンパ26は揺動するのでこれを許容するためにボールジョイント27が配置してある。
【0017】
この実施形態も電動モータ16の回転数を選ぶことによって、ヘム刃8の振動数を自由に選定でき、先の実施形態と同じ作用効果が得られる。
【0018】
【発明の効果】
本発明によれば、従来技術のようなエアシリンダではなく、電動モータに代表されるような回転駆動手段の運動を、直線方向の進退運動に変換してヘム刃を振動させるものであるから、振動数を自由に選ぶことができてロボットのアーム系との共振を避けることができる。したがって、調整ウエイトを省くことができてヘミングユニットの軽量化が可能となり、アーム系の強化を最小限もしくは止めることができて、設備費用の削減に有効となる。
【0019】
さらに、ヘム刃の運動エネルギ−向上をヘム刃の高速化によって達成できるので、アーム系に伝達される振動の振幅が小さくなり、したがって、アーム系が受ける衝撃が微細化されて、アーム系に及ぼされる振動的影響を少なくすることができる。
【図面の簡単な説明】
【図1】本発明の実施形態を示す側面図である。
【図2】図1のものの正面図である。
【図3】偏心ウエイトの部分を示す正面図である。
【図4】他の実施形態を示す側面図である。
【図5】出力軸の箇所を示す部分的な正面図である。
【符号の説明】
8 ヘム刃
15 回転駆動手段
17、17 回転軸
18、18 偏心ウエイト
23 出力軸
Claims (1)
- ヘム刃に振動を付与して鋼板等のヘミング加工を行う形式のヘミング用起振装置において、ヘム刃の上方に回転駆動手段を有し、この回転駆動手段の回転運動を直線方向の進退運動に変換してヘム刃を振動させるものであって、上記回転駆動手段は、上記直線方向に対して垂直方向の回転軸を有する2つの回転装置を、各々の回転軸が平行で、かつ同じ高さ位置で、さらに左右対称の状態で設けたものであり、各々の回転軸には偏心ウエイトを取り付け、両偏心ウエイトは相対向した位相関係にして、回転軸に対して一方が時計方向に、他方が反時計方向に回転するようにし、両偏心ウエイトによって得られる分力でヘム刃を振動させるように構成したことを特徴とするヘミング用起振装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17367099A JP3619059B2 (ja) | 1999-06-21 | 1999-06-21 | ヘミング用起振装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17367099A JP3619059B2 (ja) | 1999-06-21 | 1999-06-21 | ヘミング用起振装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001001081A JP2001001081A (ja) | 2001-01-09 |
| JP3619059B2 true JP3619059B2 (ja) | 2005-02-09 |
Family
ID=15964933
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP17367099A Expired - Fee Related JP3619059B2 (ja) | 1999-06-21 | 1999-06-21 | ヘミング用起振装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3619059B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2895690B1 (fr) * | 2006-01-05 | 2009-07-03 | Process Conception Ing Sa | Dispositif d'assemblage de pieces par pliage |
-
1999
- 1999-06-21 JP JP17367099A patent/JP3619059B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001001081A (ja) | 2001-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4778630B2 (ja) | 打撃電動手工具装置 | |
| JPH07154979A (ja) | 振動要素と弾性的継手を有する電動機 | |
| CN108374306B (zh) | 压路机 | |
| JP3919827B2 (ja) | 方向付けられた振動を発生する装置 | |
| CN103291215B (zh) | 用于驱动钻杆的驱动设备和方法 | |
| KR101754387B1 (ko) | 항공기의 동력 전달 기어박스의 타이 바용 방진 현가 시스템, 방진 현가 시스템, 및 항공기 | |
| US5388469A (en) | Rotating eccentric weights vibrator system | |
| JP3619059B2 (ja) | ヘミング用起振装置 | |
| US4616716A (en) | Synchronous vibratory impact hammer | |
| JPH0613596Y2 (ja) | エンジンへの発電機支持装置 | |
| EP0089140B1 (en) | Synchronous vibratory impact hammer | |
| CN101553625A (zh) | 振动激励器 | |
| JP2007326215A (ja) | 手工具装置 | |
| JP2001515975A (ja) | クランク伝動装置における質量バランス手段を有する作業装置 | |
| US20080245182A1 (en) | Power generation device | |
| US5123292A (en) | Motivational generator | |
| CN211275402U (zh) | 一种振动筛装置 | |
| CN102554884A (zh) | 动力工具 | |
| JP2909430B2 (ja) | 振動加工装置 | |
| Duong et al. | Development of a rotary inchworm piezoelectric motor | |
| RU205136U1 (ru) | Силовой вибрационный привод | |
| US20070137420A1 (en) | Method and device for self-contained inertial vehicular propulsion | |
| RU2334561C1 (ru) | Вибромашина | |
| CN109818528A (zh) | 一种步进式旋转型压电电机及其驱动方法 | |
| CN214656157U (zh) | 一种单驱双轴两档振幅垂直振动轮及其压路机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040812 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041012 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041111 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091119 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |