JP3571409B2 - Transmission control device for automatic transmission - Google Patents
Transmission control device for automatic transmission Download PDFInfo
- Publication number
- JP3571409B2 JP3571409B2 JP10178195A JP10178195A JP3571409B2 JP 3571409 B2 JP3571409 B2 JP 3571409B2 JP 10178195 A JP10178195 A JP 10178195A JP 10178195 A JP10178195 A JP 10178195A JP 3571409 B2 JP3571409 B2 JP 3571409B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- engagement element
- engagement
- input
- predetermined value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/06—Smoothing ratio shift by controlling rate of change of fluid pressure
- F16H61/061—Smoothing ratio shift by controlling rate of change of fluid pressure using electric control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/025—Clutch slip, i.e. difference between input and output speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H2059/6807—Status of gear-change operation, e.g. clutch fully engaged
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/46—Inputs being a function of speed dependent on a comparison between speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/08—Timing control
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Control Of Transmission Device (AREA)
Description
【0001】
【産業上の利用分野】
本発明は、車両用等に用いられる自動変速機に関し、さらに詳しくは、シフトアップ時に前段係合要素および次段係合要素の係合作動油圧(係合力)を制御する変速制御装置に関する。
【0002】
【従来の技術】
自動変速機は複数のギヤ列を有して構成され、このギヤ列により構成される複数の動力伝達経路を、クラッチ、ブレーキ等といった係合要素を油圧により係合させて選択し、入力回転の変速を行わせるようになっている。このような変速機において変速を行うに際しては、変速前段の動力伝達経路設定用の係合要素(前段係合要素)を解放するとともに、変速次段の動力伝達経路設定用の係合要素(次段係合要素)を係合させる。
【0003】
そして、このような変速をスムーズ且つタイムラグなく行わせるには、各係合要素の解放又は係合タイミングを正確に設定するとともに、各係合要素の解放又は完全係合に至るまでの係合力の制御を適正に行う必要がある。例えば、特開昭62−246653号公報には、変速指令発生後、前段係合要素の係合作動油圧を低下させてこの係合要素にある程度のスリップを生じさせる一方、次段係合要素の無効ストローク詰めを行い、その後、次段係合要素の係合開始とともに前段係合要素を解放し、徐々に次段係合要素の係合作動油圧を増加させる手法が提案されている。
【0004】
【発明が解決しようとする課題】
しかしながら、このように前段係合要素をスリップさせて変速制御を行う場合に、前段係合要素が入力トルクの全部を負担した状態で、あまり長時間にわたって前段係合要素をスリップさせると、前段係合要素が発熱したり摩耗したりし易いという問題がある。
【0005】
本発明は、このような問題に鑑みてなされたものであり、変速をスムーズ且つタイムラグなく行えるとともに、前段係合要素の摩耗等を極力防止できるようにした自動変速機の変速制御装置を提供することを目的としている。
【0006】
【課題を解決するための手段および作用】
上記の目的を達成するために、本発明の変速制御装置では、前段係合要素の係合作動油圧を速やかに低下させるような油圧指令信号を出力する前段第1ステージと、前段係合要素が所定範囲内の入出力回転数比(=出力回転数/入力回転数)でスリップする状態に維持されるように、前段係合要素の係合作動油圧を制御する油圧指令信号を出力する前段第2ステージと、次段係合要素の無効ストローク詰めを行わせるのに必要な高圧の油圧指令信号を出力する次段第1ステージと、次段係合要素の係合作動油圧を、所定油圧から第1所定変化率で増加させる油圧指令信号を出力する次段第2ステージと、前段係合要素を解放させるような油圧指令信号を出力する前段最終ステージと、次段係合要素を係合させるような油圧指令信号を出力する次段最終ステージとを設けている。そして、この変速制御装置では、シフトアップ指令の出力後に、前段および次段第1ステージを開始し、前段第1ステージにおいて前段係合要素の入出力回転数比が第1所定値になったときに、前段第1ステージから前段第2ステージに移行し、前段第2ステージにおいて前段係合要素の入出力回転数比が第1所定値よりも大きい第2所定値になったときに、次段第1ステージから次段第2ステージに移行し、前段第2ステージにおいて前段係合要素の入出力回転数比が第2所定値より大きい第3所定値になった後、前段第2ステージから前段最終ステージに移行するとともに、次段第2ステージから次段最終ステージに移行するようにしている。
【0007】
さらに、上記変速制御装置での制御において、第1所定値を1.0より小さな値に設定し、第2所定値を第1所定値より大きく且つ1.0より小さな値に設定し、第3所定値を1.0より大きい値に設定している。
【0008】
このような変速制御装置によれば、前段第1ステージによって前段係合要素にスリップが生じ始めるとほぼ同時に、次段第1ステージによる次段係合要素の無効ストローク詰めが行われ、前段係合要素の入出力回転数比が第1所定値を経て第2所定値になった(無効ストローク詰めがほぼ完了した)後速やかに次段第2ステージに移行して次段係合要素の係合作動油圧が上昇する。このため、前段係合要素のみによって入力トルクを負担するのは、次段係合要素の無効ストローク詰めが行われている短時間の間だけであり、その後は前段および次段係合要素の双方により入力トルクを分担する。このため、全入力トルクを負担しながらスリップし続ける場合に比べて前段係合要素の摩耗が防止される。なお、前段第2ステージに移行した状態では、前段係合要素は微少スリップが生じた状態(入出力回転数比が1.0に近い所定範囲内にある状態)に保持されるため、入力回転(エンジン回転)の吹き上がりは確実に防止される。
【0009】
しかも、前段係合要素の入出力回転数比が第3所定値になった後、即ち次段係合要素の係合作動油圧力がある程度上昇して入力トルクの負担割合が大きくなってから、前段最終ステージに移行して前段係合要素を解放させるとともに、次段最終ステージに移行して次段係合要素を係合させるようにしているため、変速ショックの発生を抑えることができる。
【0010】
さらに、上記変速制御装置での制御において、次段第2ステージを、次段係合要素の係合作動油圧を上記所定油圧に保持する油圧指令信号を第1所定時間出力してから、この次段係合要素の係合作動油圧を第1所定変化率で増加させる油圧指令信号を出力するように構成している。
【0011】
次段第1ステージにおける高圧の油圧指令信号の出力を断った直後に再び油圧指令信号を上昇させようとすると、油圧制御手段の応答遅れ等によって次段係合要素の係合作動油圧が一時的に大きく低下する可能性がある。このため、上記のように高圧の油圧指令信号の出力を断った後、短時間(第1所定時間)だけ油圧指令信号を低く(次段係合要素を係合直前状態又は極く僅かにトルク伝達を行う状態に保持するために必要な係合作動油圧を生じさせる程度)に維持しておくことにより、それ以降、次段係合要素の係合作動油圧を比較的スムーズに増加させることができる。
【0012】
また、次段係合要素の入出力回転数比が第2所定変化率で1.0に近づくようにこの次段係合要素の係合作動油圧を制御する油圧指令信号を出力する次段第3ステージを設け、前段第2ステージにおいて前段係合要素の入出力回転数比が第3所定値になったときに、次段第2ステージから次段第3ステージに移行し、その後次段最終ステージに移行するようにしてもよい。
【0013】
これによれば、次段係合要素の係合作動油圧を次段第2ステージの終了時点よりもさらに増加させ、次段係合要素の入出力回転数比を係合開始状態に近づけた状態で、前段係合要素を解放するとともに次段係合要素を係合させることができる。このため、変速ショックがより軽減される。
【0014】
さらに、次段第3ステージにおいて次段係合要素の入出力回転数比が1.0より小さな第4所定値になったときから第2所定時間が経過したときに、次段係合要素を完全係合させる油圧指令信号を出力するようにしてもよい。
【0015】
この場合、次段係合要素の入出力回転数比が第4所定値になってからほぼ1.0になると予想される時間を第2所定時間として設定しておけば、入出力回転数比が1.0になったか否かを直接判断しなくても、ショックなく次段係合要素を係合させることができる。また、運転者がアクセルを多少戻すこと等により生じる入力トルクの変化に伴って、入出力回転数比の変化率が変動した場合でも、スムーズに次段係合要素を係合させることができる。
【0016】
【実施例】
以下、図面を参照して本発明の好ましい実施例について説明する。
本発明に係る変速制御装置により変速制御がなされる自動変速機の動力伝達系構成を図1に示している。
この変速機は、エンジン出力軸1に接続されたトルクコンバータ2と、このトルクコンバータ2のタービン軸に接続された変速機入力軸3とを有し、入力軸3の上にプラネタリ式変速機構が配設されている。
【0017】
この変速機構は、変速機入力軸3の上に並列に配置された第1、第2および第3プラネタリギヤ列G1,G2,G3を有する。各ギヤ列はそれぞれ、中央に位置する第1〜第3サンギヤS1,S2,S3と、これら第1〜第3サンギヤに噛合してその周りを自転しながら公転する第1〜第3プラネタリピニオンP1,P2,P3と、このピニオンを回転自在に保持してピニオンの公転と同一回転する第1〜第3キャリアC1,C2,C3と、上記ピニオンと噛合する内歯を有した第1〜第3リングギヤR1,R2,R3とから構成される。
なお、第1および第2プラネタリギヤ列G1,G2はダブルピニオン型プラネタリギヤ列であり、第1および第2ピニオンP1,P2は、図示のようにそれぞれ2個のピニオンP11,P12およびP21,P22から構成される。
【0018】
第1サンギヤS1は入力軸3に常時連結され、第1キャリアC1は第1ブレーキB1により固定保持可能であるとともに第2サンギヤS2と常時連結されている。第1リングギヤR1は第3クラッチCL3を介して第1キャリアC1および第2サンギヤS2と係脱自在に連結されている。第2キャリアC2と第3キャリアC3とが常時連結されるとともに出力ギヤ4とも常時連結されている。第2リングギヤR2と第3リングギヤR3とは常時連結されており、これらが第2ブレーキB2により固定保持可能であるとともにワンウェイクラッチB3を介してケースに接続されて前進側駆動方向の回転に対してのみブレーキ作用を生じさせるようになっており、さらに、これらは第2クラッチCL2を介して入力軸3と係脱可能に連結している。第3サンギヤS3は第1クラッチCL1を介して入力軸と係脱可能に連結している。
また、入力回転センサー9aと出力回転センサー9bとが図示のように配設されている。
【0019】
以上のように構成した変速機において、第1〜第3クラッチCL1〜CL3および第1,第2ブレーキB1,B2の係脱制御を行うことにより、変速段の設定および変速制御を行うことができる。具体的には、表1に示すように係脱制御を行えば、前進5速(1ST,2ND,3RD,4TH,5TH)、後進1速(REV)を設定できる。
【0020】
なお、この表1において、1STにおける第2ブレーキB2に括弧を付けているが、これは第2ブレーキB2を係合させなくてもワンウェイクラッチB3の作用により1ST変速段が設定できるからである。すなわち、第1クラッチCL1を係合させれば、第2ブレーキB2を係合させなくても1ST変速段の設定が可能である。但し、ワンウェイクラッチB3は駆動側とは逆の動力伝達は許容できず、このため、第2ブレーキB2が非係合状態であるときの1STはエンジンブレーキの効かない変速段となり、第2ブレーキB2を係合させればエンジンブレーキの効く変速段となる。なお、Dレンジの1STはエンジンブレーキの効かない変速段である。
【0021】
【表1】

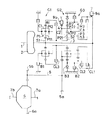
次に、第1〜第3クラッチCL1〜CL3と第1,第2ブレーキB1,B2の係脱制御を行うための制御装置を図2〜図4に基づいて説明する。なお、図2〜図4は制御装置の各部を示し、これら三つの図により一つの制御装置を構成している。また、各図の油路のうち、終端に丸囲みのアルファベット(A〜Y)が付いているものは、他の図の同じアルファベットが付いた油路と繋がっていることを意味する。さらに、図における×印はその部分がドレンされていることを意味する。
【0023】
この制御装置には油圧ポンプ10から作動油が供給されており、この作動油がレギュレータバルブ20によりライン圧P1に調圧されて油路100に送られ、図示のように供給される。
この制御装置内には、このレギュレータバルブ20の外に、運転席のシフトレバーに繋がり運転者のマニュアル操作により作動されるマニュアルバルブ25と、6個のソレノイドバルブSA〜SFと、6個の油圧作動バルブ30,35,40,45,50,55と、4個のアキュムレータ71〜74とが配設されている。ソレノイドバルブSA,SC,SFはノーマルオープンタイプのバルブでソレノイドが通電オフのときにはこれらバルブは開放される。一方、ソレノイドバルブSB,SD,SEはノーマルクローズタイプのバルブでソレノイドが通電オフのときにはこれらバルブは閉止される。
【0024】
なお、以下においては、バルブ30をリデューシングバルブ、バルブ35をL−Hシフトバルブ、バルブ40をFWD圧スイッチングバルブ、バルブ45をREV圧スイッチングバルブ、バルブ50をデリバリーバルブ、バルブ55をリリーフバルブと称する。
【0025】
上記マニュアルバルブ25の作動と、ソレノイドバルブSA〜SFの作動とに応じて各バルブが作動され、変速制御が行われる。この場合での各ソレノイドバルブの作動とこの作動に伴い設定される速度段との関係は下記表2に示すようになる。この表2におけるON,OFFはソレノイドのON,OFFを表している。なお、この表2においてはソレノイドバルブSFの作動は表示していないが、このソレノイドバルブSFはリバース速度段設定時にライン圧を増圧するときに用いるものであり、変速段設定には使用されないものであるためである。
【0026】
【表2】
上記制御について、以下に説明する。
まず、シフトレバーによりDレンジ(前進側レンジ)が設定され、マニュアルバルブ25のスプール26がD位置に移動した場合を考える。図においては、スプール26はN位置にあり、右端フック部がD位置まで右動されてスプール26はD位置に位置する。このとき、ライン圧P1を有する作動油は、油路100から分岐する油路101,102に送られ、FWDスイッチングバルブ40のスプール溝を通って油路103からマニュアルバルブ25に送られる。そして、スプール26の溝を介して油路110および120に送られる。なお、油路110はこの状態ではREVスイッチングバルブ45において閉塞されている。
【0028】
油路120に送られたライン圧P1の作動油は、分岐油路121,122,123,124,125を介してそれぞれソレノイドバルブSF,SE,SD,SB,SAに供給される。油路120のライン圧P1はL−Hシフトバルブ35の右端にも作用し、このバルブ35のスプール36を左動させる。油路120の分岐油路126はデリバリーバルブ50の右側に繋がり、油路126から分岐する油路127はリリーフバルブ55の左端に繋がり、このバルブ55のスプール56,57を右動させる。
【0029】
一方、油路103の分岐油路103aはFWDスイッチングバルブ40の右端に繋がり、ライン圧P1によりスプール41は左方に押圧される。油路103の分岐油路104は左動されたL−Hシフトバルブ35のスプール36の溝を介して油路105に送られ、ライン圧P1をFWDスイッチングバルブ40の左側に作用させる。油路104の分岐油路106はREVスイッチングバルブ45の右端に繋がり、ライン圧P1によりそのスプール46を左動状態で保持させる。
また、油路103の分岐油路107はソレノイドバルブSCに繋がり、ソレノイドバルブSCにもライン圧P1が供給される。
【0030】
以上のように、ソレノイドバルブSA〜SFにはそれぞれライン圧P1が供給されており、このバルブの開閉制御によりライン圧P1を有した作動油の供給制御を行うことができる。
【0031】
ここでまず、1ST変速段を設定する場合を説明する。なお、変速段の設定では表2に示すようにソレノイドバルブSFは関係しないので、ここではソレノイドバルブSA〜SEについてのみ考える。
1STでは、表2に示すように、ソレノイドバルブSCがオンで、それ以外がオフであり、ソレノイドバルブSAのみが開放され、他のソレノイドバルブは閉止される。ソレノイドバルブSAが開放されると、油路125から油路130にライン圧P1が供給され、油路130からD位置に位置したマニュアルバルブスプール26の溝を通って油路131にライン圧P1が供給される。
【0032】
油路131の分岐油路131aはリリーフバルブ55の右端に繋がっており、ライン圧P1がリリーフバルブ55の右端に作用する。さらに、油路131から分岐する油路132を介してライン圧P1は第1クラッチCL1に供給され、第1クラッチCL1が係合される。なお、このクラッチ圧CL1の変化は第1アキュムレータ71により調整される。
【0033】
なお、第2クラッチCL2はリリーフバルブ55(このときスプール56,57は右動状態)からソレノイドバルブSBを介してドレンに繋がり、第3クラッチCL3はソレノイドバルブSCを介してドレンに繋がり、第1ブレーキB1はリリーフバルブ55からソレノイドバルブSCを介してドレンに繋がり、第2ブレーキB2はマニュアルバルブ25を介してドレンに繋がる。このため、第1クラッチCL1のみが係合されて1ST速度段が設定される。
【0034】
次に、2ND速度段を設定する場合を考える。このときには、ソレノイドバルブSDがオフからオンに切り換わり、ソレノイドバルブSDも開放される。これにより、油路123から油路140にライン圧P1が供給され、スプール56,57が右動した状態のリリーフバルブ55から油路141を介して第1ブレーキB1にライン圧P1を有した作動油が供給される。このため、第1クラッチCL1および第1ブレーキB1がともに係合されて2ND速度段が設定される。
【0035】
3RD速度段を設定するときには、ソレノイドバルブSCがオンからオフに切り換わり、ソレノイドバルブSDがオフに戻される。ソレノイドバルブSDがオフに戻るため、第1ブレーキB1は開放される。ソレノイドバルブSCがオフに切り換わることにより、これが開放され、油路107からライン圧P1を有した作動油が油路145を介して第3クラッチCL3に供給される。これにより第3クラッチCL3が係合されて3RD速度段が設定される。
このとき同時に、油路145から分岐する油路146を介してライン圧P1がデリバリーバルブ50の左側に作用し、油路147を介してライン圧P1がリリーフバルブ55の右端に作用する。
【0036】
4TH速度段を設定するときには、ソレノイドバルブSBをオフからオンに切換えるとともに、ソレノイドバルブSCをオンに戻す。ソレノイドバルブSCがオンに戻されるため、第3クラッチCL3は解放される。一方、ソレノイドバルブSBがオンに切り換わることにより、ソレノイドバルブSBが開放され、油路124からライン圧P1が油路150,151に供給され、右動したスプール56の溝から油路152を介して第2クラッチCL2にライン圧P1が供給される。このため、第2クラッチCL2が係合されて4TH速度段が設定される。
【0037】
5TH速度段を設定するときには、ソレノイドバルブSAをオフからオンに切り換えるとともにソレノイドバルブSCをオンからオフに切り換える。ソレノイドバルブSAがオフからオンに切り換わると、油路130へのライン圧P1の供給が遮断され、且つ第1クラッチCL1はソレノイドバルブSAを介してドレンに繋がり、第1クラッチCL1は解放される。一方、ソレノイドバルブSCがオフに切り換えられると、上述のように第3クラッチCL3が係合され、この結果5TH速度段が設定される。
【0038】
以上のようにして各クラッチ、ブレーキの係合制御が行われるのであるが、ここで、シフトアップされる場合の係合制御を図5に示すタイムチャートと図6〜図8に示すフローチャートに基づいて説明する。図6のフローチャートに示すように、ステップS2では、シフト指令が出力されたか否かが判断され、出力されたと判断されると、さらにステップS4においてそのシフト指令がシフトアップ指令か否かが判断される。シフトアップ指令のときは、ステップS6においてアクセル操作によるスロットル開度θTHが所定開度θaよりも大きいか否かが判断され、θTH>θaと判断されるとステップS10に進み、パワーオン・シフトアップ制御が行われる。一方、θTH≦θaと判断されるとステップS60に進み、パワーオフ・シフトアップ制御が行われる。
【0039】
パワーオン・シフトアップ制御は、図7および図8に示すフローチャートに従って行われる。なお、ここではタイムチャートに示すように、時間t0 において2速段から3速段へのシフトアップ指令が出された場合について説明する。
【0040】
このパワーオン・シフトアップ制御では、2速段(前段)設定用のソレノイドバルブSDと3速段(次段)設定用のソレノイドバルブSCとが制御される。なお、ソレノイドバルブSD、SCのオン・オフおよびデューティ比を決めるための信号が、請求の範囲にいう油圧指令信号であり、タイムチャートにはこれら油圧指令信号をSSD、SSCとして示している。図7に示すソレノイドバルブSDの制御フローにおいては、ステップS12において、シフトアップ指令が出力された直後から所定時間T1のカウントがスタートする。これと同時に、図8に示すソレノイドバルブSCの制御フローにおいては、ステップS32において、シフトアップ指令が出力された直後から所定時間T2(>T1)のカウントがスタートする。この間、パワーオン状態なので、タービン回転数NT はゆるやかに上昇する。
【0041】
ソレノイドバルブSD側のステップS14において所定時間T1の経過が判断されると(時間t1)、ステップS16に進み、前段第1ステージSTO1が開始される。この前段第1ステージSTO1では、タイムチャートに示すように、ソレノイドバルブSDが低いデューティ比で制御される。この結果、完全係合状態にあった第1ブレーキB1の係合作動油圧(以下、単に油圧という)PO が徐々に低下して、第1ブレーキB1の係合力が弱まり、この第1ブレーキB1にスリップが発生する。従って、タービン回転数NT もスリップが発生していないときよりもやや大きめに(但し、吹き上がらない程度に)上昇する(タービン回転加速度αT 参照)。なお、制御装置内においては、入力回転センサ9aと出力回転センサ9bの検出値および2速段のギヤ比から第1ブレーキB1の入出力回転数比(=出力ギヤ4の回転数×2速段ギヤ比/入力軸3の回転数)eCLO を演算している。
【0042】
一方、ソレノイドバルブSC側のステップS34において所定時間T2の経過が判断されると(時間t2)、ステップS36に進み、次段第1ステージSTR1が開始される。この次段第1ステージSTR1では、タイムチャートに示すように、ソレノイドバルブSCがオフにされる。この結果、それまで解放状態にあった第3クラッチCL3にライン圧が供給されて油圧PR が増加し、第3クラッチCL3の無効ストローク詰めが速やかに行われる。なお、制御装置内においては、各回転センサ9a、9bの検出値および3速段のギヤ比から第3クラッチCL3の入出力回転数比(=出力ギヤ4の回転数×3速段ギヤ比/入力軸3の回転数)eCLR も演算している。
【0043】
第3クラッチCL3の無効ストローク詰めが行われている間に、第1ブレーキB1の入出力回転数比がeCLO が徐々に小さくなり、ステップS18において第1所定値eCLO1(<1.0)以下になったと判断されると(時間t3)、ソレノイドバルブSDの制御はステップS20に進み、前段第2ステージSTO2に移行する。この前段第2ステージSTO2では、実際の入出力回転数比eCLO がフィードバックされ、これを目標入出力回転数比に合わせるのに必要な第1ブレーキB1の油圧が演算される。ソレノイドバルブSDは、この演算された油圧に対応したデューティ比で制御される。なお、目標入出力回転数比は、第1ブレーキB1の入出力回転数比eCLO が1.0に近い所定範囲(第1所定値eCLO1よりも若干大きな入出力回転数比を下限値とする範囲)に維持されるように選択される。これにより、第1ブレーキB1は、微少スリップが生じている状態、即ち入力トルクにほぼ等しいトルク伝達容量を有した状態に保持される。このため、前段第2ステージSTO2が実行されている間は、タービン回転数NT (エンジン回転数)の吹き上がりが防止される。
【0044】
このような前段第2ステージSTO2の制御が行われることにより、第1ブレーキB1の入出力回転数比eCLO が、第1所定値eCLO1より大きくなり(1.0に近づき)、ステップS38において第2所定値eCLO2(<1.0)以上になったと判断されると(時間t4)、ソレノイドバルブSCの制御は、ステップS40に進み、所定時間(請求の範囲にいう第1所定時間)T4のカウントをスタートさせるとともに、ステップS42に進んで次段第2前期ステージSTR2aに移行する。この際、第3クラッチCL3の無効ストローク詰めはほぼ終了し、第3クラッチCL3は係合直前状態又は極く僅かなトルク伝達が行われる予備係合状態になっている。
【0045】
次段第2前期ステージSTR2aでは、ソレノイドバルブSCのデューティ比を高くして、第3クラッチCL3の油圧PR を、第3クラッチCL3を係合直前状態又は予備係合状態に保持できる程度の油圧に設定する。
【0046】
ステップS44において所定時間T4の経過が判断されると(時間t5)、ソレノイドバルブSCの制御はステップS46に進み、次段第2後期ステージSTR2bに移行する。この次段第2後期ステージSTR2bでは、ソレノイドバルブSCのデューティ比を前期ステージSTR2aのデューティ比から徐々に下げていき、第3クラッチCL3の油圧PR を、係合直前状態又は予備係合状態の保持圧からほぼ一定の変化率(請求の範囲にいう第1所定変化率)で増加させる。
【0047】
ここで、第3クラッチCL3の油圧PR が増加するに従って、第3クラッチCL3の入力トルクの分担割合が増加する一方、第1ブレーキB1の分担割合が低下する。このため、スリップ状態にある第1ブレーキB1における発熱や摩耗が抑制される。
【0048】
こうして第1ブレーキB1の入出力回転数比eCLO は徐々に1.0に近づき、第3クラッチCL3の油圧PR がある程度増加した時点では、タービン回転数NT が比較的大きく下降する一方、出力回転は慣性によってさほど低下しないため、第1ブレーキB1の入出力回転数比eCLO が1.0を超える状態になる。なお、このとき車体の加速度Gは若干変動する。
【0049】
そして、ステップS22およびステップS48において、入出力回転数比eCLO が第3所定値eCLO3(>1.0)以上になったと判断されると(時間t6)、それぞれステップS24およびステップS50に進む。ステップS24では、ソレノイドバルブSDの制御が、前段第3ステージ(請求の範囲にいう前段最終ステージ)STO3に移行する。前段第3ステージSTO3では、ソレノイドバルブSDをOFFにし、第1ブレーキB1を解放する。
【0050】
一方、ステップS50では、ソレノイドバルブSCの制御が次段第3ステージSTR3に移行する。この次段第3ステージSTR3では、第3クラッチCL3の入出力回転数比eCLR が一定変化率(請求の範囲にいう第2所定変化率)で1.0に近づくように、ソレノイドバルブSCがデューティ比制御される。これにより、第3クラッチCL3の油圧PR は徐々に上昇し、タービン回転数NT は徐々に下降する。
【0051】
そして、ステップS52において、第3クラッチCL3の入出力回転数比eCLR が第4所定値eCLR1以上になったと判断されると(時間t7)、ソレノイドバルブSCの制御はステップS54に進み、所定時間(請求の範囲にいう第2所定時間)T5のカウントがスタートされる。この間も次段第3ステージSTR3の制御が続行され、ステップS56において所定時間T5の経過が判断されると、ステップS58に進み、次段第4ステージ(請求の範囲にいう次段最終ステージ)STR4に進む。この次段第4ステージSTR4では、ソレノイドバルブSCをOFFにし、第3クラッチCL3を完全係合させる(時間t8)。なお、この後、スロットル開度θTHに応じてタービン回転数NT は徐々に上昇する。
【0052】
なお、入出力回転数比eCLR が1.0になったとの判断は容易ではないが、入出力回転数比eCLR が第4所定値eCLR1になってから、これがほぼ1.0になると予想される所定時間T5の経過により第3クラッチCL3を完全係合させることによって、上記判断を行うことなく、且つショックなく第3クラッチCL3を完全係合させることができる。
こうして、パワーオン状態での2速段から3速段への切換えが完了する(ステップS12)。
【0053】
一方、パワーオフ・シフトアップ制御についても、図6〜図8に示すフローチャトと同じフローチャトに従って制御される。図9のタイムチャートでは、前段第1ステージSTO1の途中においてアクセルが戻された場合を示している。この場合、パワーオン・シフトアップ制御における前段第1ステージSTO1は、アクセルが戻された時間t1′をもってパワーオフ・シフトアップ制御における前段第1ステージSTO1に切り換わることになる。
【0054】
なお、パワーオフ状態では、パワーオンの場合よりも入力トルクが小さいため、前段第1ステージSTO1および前段第2ステージSTO2におけるソレノイドバルブSDのデューティ比や、次段第2前期・後期ステージSTR2a、STR2bおよび次段第3ステージSTR3におけるソレノイドバルブSCのデューティ比は低めに設定される。また、各所定値の設定についても、パワーオンの場合とは若干異なる。特に、所定時間T1、T2を0(零)に設定し、シフトアップ指令が出力された後、すぐに第1ブレーキB1のスリップ制御(前段第1ステージSTO1)を開始し、ほぼ同時に第3クラッチの無効ストローク詰め制御(次段第1ステージSTR1)を開始するのが望ましい。このようにすれば、変速制御に必要な時間を短縮することができる。
【0055】
そして、このように各ステージ途中において、パワーオン・シフトアップ制御とパワーオフ・シフトアップ制御との切換えが行われた場合に、切換前に係属していたステージと同じステージに係属できるように(即ち、上記切換えによって改めて切換後のフローチャートの最初から制御が開始されてしまうことがないように)する必要がある。このため、フローチャート内に、所定時間T1、T2の経過を判断したときおよび各ステージが終了する毎に、これを示すためのフラグを立てるステップを設けるのが望ましい。例えば、図9のような制御においては、所定時間T1の経過を示すフラグを立てておけば、切換えと同時に前段解放ステージSTO1が開始される一方、所定時間T2のカウントが続行される。
【0056】
なお、上記実施例では、入出力回転数比を(出力軸回転数×ギヤ比/入力軸回転数)というように定義し、この入出力回転数比が小さな値から大きな値に変化するようにステージを構成した場合について説明したが、本発明の変速制御装置では、入出力回転数比を(入力軸回転数×ギヤ比/出力軸回転数)というように定義し、この入出力回転数比が大きな値から小さな値に変化するようにステージを構成してもよい。
【0057】
【発明の効果】
以上説明したように、本発明の変速制御装置では、前段第1ステージによって前段係合要素にスリップが生じ始めるとほぼ同時に、次段第1ステージによる次段係合要素の無効ストローク詰めを行い、前段係合要素の入出力回転数比が第1所定値を経て第2所定値になった(無効ストローク詰めがほぼ完了した)後速やかに次段第2ステージに移行して次段係合要素の係合作動油圧を徐々に上昇させるようになっている。このため、前段係合要素のみによって入力トルクを負担するのは、次段係合要素の無効ストローク詰めが行われている短時間の間だけであり、その後は前段および次段係合要素の双方により入力トルクを分担する。したがって、従来のように全入力トルクを負担しながらスリップし続ける場合に比べて前段係合要素の発熱や摩耗が抑制される。なお、このように各係合要素の入出力回転数比を用いることにより、各係合要素の係合制御を独立して行うことができ、制御の精度を向上させることができる。
【0058】
また、前段第2ステージに移行したとき、前段係合要素は微少スリップが生じた状態に保持される。このため、入力回転(エンジン回転)の吹き上がりを確実に防止することができる。
【0059】
しかも、本変速制御装置では、前段係合要素の入出力回転数比が第3所定値になった後、即ち次段係合要素の係合作動油圧がある程度上昇して入力トルクの負担割合が大きくなった後に、前段最終ステージに移行して前段係合要素を解放させるとともに、次段最小ステージに移行して次段係合要素を完全係合させるようになっている。このため、次段係合要素の完全係合の際におけるショックの発生を抑えることができる。
【0060】
さらに、次段係合要素を所定油圧に保持する油圧指令信号を第1所定時間出力してから、この次段係合要素の係合作動油圧を第1所定変化率で増加させる油圧指令信号を出力するように次段第2ステージを構成しているので、次段第1ステージから次段第2ステージに移行する際の次段係合要素の油圧変動を防止することができ、スムーズな変速制御を行うことができる。
【0061】
また、前段第2ステージにおいて前段係合要素の入出力回転数比が第3所定値になった後、次段第3ステージに移行して次段係合要素の係合作動油圧を次段第2ステージの終了時点よりもさらに上昇させ、次段係合要素の入出力回転数比をできるだけ1.0に近づけた状態で前段最終ステージに移行して前段係合要素を解放するとともに、次段最終ステージに移行して次段係合要素を係合させるようにすれば、よりショックの少ない変速段の切換えを行うことができる。
なお、上記第3所定値を用いる代わりに、次段係合要素の入出力回転数比によりこの係合要素の係合状態を確認して前段係合要素を解放するようにしてもよい。
【0062】
さらに、次段第3ステージにおいて次段係合要素の入出力回転数比が1.0より小さな第4所定値になったときから第2所定時間が経過したときに次段係合要素を完全係合させるようにしておき、次段係合要素の入出力回転数比が第4所定値になってからほぼ1.0になると予想される時間を第2所定時間として設定しておけば、入出力回転数比が1.0になったか否かを直接判断しなくても、ショックなく次段係合要素を完全係合させることができる。
【図面の簡単な説明】
【図1】本発明に係る変速制御装置による変速制御が行われる自動変速機の構成を示す概略図である。
【図2】本発明に係る変速制御装置を構成する油圧回路図である。
【図3】本発明に係る変速制御装置を構成する油圧回路図である。
【図4】本発明に係る変速制御装置を構成する油圧回路図である。
【図5】本発明に係る変速制御装置によるパワーオン・シフトアップ制御における各種変数の経時変化を示すグラフである。
【図6】本発明に係る変速制御装置による変速制御内容を表すフローチャートである。
【図7】本発明に係る変速制御装置による変速制御内容を表すフローチャートである。
【図8】本発明に係る変速制御装置による変速制御内容を表すフローチャートである。
【図9】本発明に係る変速制御装置によるパワーオフ・シフトアップ制御における各種変数の経時変化示すグラフである。
【符号の説明】
3 変速機入力軸
4 変速機出力ギヤ
10 油圧ポンプ
20 レギュレータバルブ
25 マニュアルバルブ
30 リデューシングバルブ
35 L−Hシフトバルブ
40 FWDスイッチングバルブ
45 REVスイッチングバルブ
50 デリバリーバルブ
55 リリーフバルブ[0001]
[Industrial applications]
The present invention relates to an automatic transmission used for a vehicle or the like, and more particularly, to a shift control device that controls engagement hydraulic pressure (engagement force) of a preceding engagement element and a next engagement element at the time of upshifting.
[0002]
[Prior art]
The automatic transmission is configured with a plurality of gear trains, and a plurality of power transmission paths formed by the gear trains are selected by engaging engagement elements such as clutches, brakes, and the like with hydraulic pressure, and input rotation is selected. The shift is performed. When performing a gear shift in such a transmission, the engaging element for setting the power transmission path before the gear shift (the previous engaging element) is released, and the engaging element for setting the power transmission path following the gear shift (the next engaging element) is used. (Step engaging element).
[0003]
In order to make such a shift smoothly and without a time lag, the disengagement or engagement timing of each engagement element is accurately set, and the engagement force until the engagement element is released or completely engaged is determined. It is necessary to control properly. For example, Japanese Patent Application Laid-Open No. 62-246653 discloses that after a gearshift command is issued, the engagement hydraulic pressure of a previous-stage engagement element is reduced to cause a certain degree of slip in this engagement element, while the next-stage engagement element A method has been proposed in which the invalid stroke is reduced, and then, the engagement of the next-stage engagement element is released, and the previous-stage engagement element is released, so that the engagement hydraulic pressure of the next-stage engagement element is gradually increased.
[0004]
[Problems to be solved by the invention]
However, in the case where the shift control is performed by slipping the front engagement element in this way, if the front engagement element is slipped for an excessively long time in a state where the front engagement element bears all of the input torque, the front engagement force is reduced. There is a problem that the combined element is likely to generate heat or wear.
[0005]
The present invention has been made in view of such a problem, and provides a shift control device for an automatic transmission in which shifting can be performed smoothly and without a time lag, and wear and the like of a front engagement element can be prevented as much as possible. It is aimed at.
[0006]
Means and action for solving the problem
In order to achieve the above object, in the transmission control device of the present invention, the first-stage first-stage that outputs a hydraulic command signal that quickly reduces the engagement hydraulic pressure of the first-stage engagement element, and the first-stage engagement element include: A first-stage hydraulic output command signal for controlling an engagement hydraulic pressure of the first-stage engagement element so as to maintain a slip state at an input / output rotation speed ratio (= output rotation speed / input rotation speed) within a predetermined range. The two-stage, the next-stage first stage that outputs a high-pressure hydraulic command signal required to perform the invalid stroke filling of the next-stage engagement element, and the engagement hydraulic pressure of the next-stage engagement element from a predetermined hydraulic pressure A second stage for outputting a hydraulic command signal for increasing at a first predetermined change rate, a last stage for outputting a hydraulic command signal for releasing the previous engaging element, and a next stage engaging element are engaged. Output such a hydraulic command signal It is provided a stage final stage. Then, in this shift control device, after the output of the upshift command, the first stage of the previous stage and the next stage is started, and when the input / output rotation ratio of the first stage engagement element reaches the first predetermined value in the first stage of the first stage. In addition, the first stage is shifted from the first stage to the second stage, and when the input / output rotation ratio of the front engagement element becomes the second predetermined value larger than the first predetermined value in the second stage, the next stage is performed. The first stage shifts to the next second stage, and after the input / output rotation ratio of the previous engagement element has reached the third predetermined value larger than the second predetermined value in the second previous stage, the previous second stage is shifted to the previous stage. The process shifts to the final stage, and shifts from the second stage to the final stage.
[0007]
Further, in the control by the shift control device, the first predetermined value is set to a value smaller than 1.0, the second predetermined value is set to a value larger than the first predetermined value and smaller than 1.0, The predetermined value is set to a value larger than 1.0 .
[0008]
According to such a shift control device, almost immediately when slippage occurs in the previous-stage engagement element by the first-stage first stage, the ineffective stroke of the next-stage engagement element is reduced by the next-stage first stage. After the input / output rotational speed ratio of the element reaches the second predetermined value after passing the first predetermined value (the invalid stroke reduction is almost completed), the operation immediately shifts to the next second stage to engage the next stage engagement element. Dynamic hydraulic pressure increases. For this reason, the input torque is borne only by the previous-stage engagement element only during the short time period during which the invalid stroke of the next-stage engagement element is reduced. To share the input torque. Therefore, abrasion of the front-stage engagement element is prevented as compared with the case where the vehicle continues to slip while bearing the entire input torque. Note that, in the state of shifting to the second stage of the previous stage, the front stage engaging element is maintained in a state in which a slight slip has occurred (a state in which the input / output rotational speed ratio is within a predetermined range close to 1.0). (Engine rotation) is reliably prevented from rising.
[0009]
Moreover, after the input / output rotational speed ratio of the previous-stage engagement element has reached the third predetermined value, that is, after the engagement hydraulic oil pressure of the next-stage engagement element has increased to some extent and the input torque share ratio has increased, Since the process shifts to the preceding final stage to release the former engaging element, and shifts to the next final stage to engage the next engaging element, it is possible to suppress the occurrence of a shift shock.
[0010]
Further, in the control by the shift control device, the next-stage second stage outputs a hydraulic command signal for maintaining the engagement operating oil pressure of the next-stage engagement element at the predetermined hydraulic pressure for the first predetermined time, and then outputs the signal to the next stage. It is configured to output a hydraulic pressure command signal for increasing the engagement hydraulic pressure of the step engagement element at a first predetermined change rate .
[0011]
If it is attempted to raise the hydraulic command signal again immediately after the output of the high-pressure hydraulic command signal in the first stage of the next stage is stopped, the engagement hydraulic pressure of the next-stage engaging element is temporarily reduced due to a response delay of the hydraulic control means or the like. May be greatly reduced. For this reason, after the output of the high-pressure hydraulic command signal is cut off as described above, the hydraulic command signal is lowered for a short time (first predetermined time) (just before the next-stage engaging element is engaged or a very slight torque). (To the extent that the engagement hydraulic pressure necessary to maintain the transmission state is generated), it is possible to relatively smoothly increase the engagement hydraulic pressure of the next-stage engagement element thereafter. it can.
[0012]
In addition, the next stage output unit outputs a hydraulic pressure command signal for controlling the engagement hydraulic pressure of the next stage engagement element so that the input / output rotation ratio of the next stage engagement element approaches 1.0 at the second predetermined change rate. Three stages are provided, and when the input / output rotation ratio of the previous stage engaging element reaches the third predetermined value in the second stage of the previous stage, the stage shifts from the second stage of the next stage to the third stage of the next stage. You may make it shift to a stage.
[0013]
According to this, the engagement hydraulic pressure of the next-stage engagement element is further increased from the end point of the next-stage second stage, and the input / output rotation speed ratio of the next-stage engagement element is brought closer to the engagement start state. Thus, the first-stage engagement element can be released and the next-stage engagement element can be engaged. Therefore, the shift shock is further reduced.
[0014]
Further, when the input / output rotation ratio of the next-stage engagement element has reached a fourth predetermined value smaller than 1.0 in the next-stage third stage, when the second predetermined time has elapsed, the next-stage engagement element is activated. A hydraulic command signal for complete engagement may be output.
[0015]
In this case, if the time that the input / output rotational speed ratio of the next-stage engagement element is expected to become approximately 1.0 after reaching the fourth predetermined value is set as the second predetermined time, the input / output rotational speed ratio can be set. Can be engaged without shock without directly judging whether or not has become 1.0. Further, even if the change rate of the input / output rotation ratio fluctuates with a change in the input torque caused by the driver slightly returning the accelerator, the next-stage engagement element can be smoothly engaged.
[0016]
【Example】
Hereinafter, preferred embodiments of the present invention will be described with reference to the drawings.
FIG. 1 shows a power transmission system configuration of an automatic transmission in which a shift control is performed by a shift control device according to the present invention.
This transmission has a
[0017]
This transmission mechanism has first, second and third planetary gear trains G1, G2, G3 arranged in parallel on the
Note that the first and second planetary gear trains G1 and G2 are double pinion type planetary gear trains, and the first and second pinions P1 and P2 are respectively composed of two pinions P11, P12 and P21 and P22 as shown. Is done.
[0018]
The first sun gear S1 is always connected to the
Further, an input rotation sensor 9a and an output rotation sensor 9b are provided as shown in the figure.
[0019]
In the transmission configured as described above, by performing the disengagement control of the first to third clutches CL1 to CL3 and the first and second brakes B1 and B2, it is possible to perform the setting of the shift speed and the shift control. . Specifically, by performing the engagement / disengagement control as shown in Table 1, the forward five speeds (1ST, 2ND, 3RD, 4TH, 5TH) and the reverse first speed (REV) can be set.
[0020]
Note that, in Table 1, the second brake B2 in 1ST is parenthesized because the 1st shift speed can be set by the action of the one-way clutch B3 without engaging the second brake B2. That is, if the first clutch CL1 is engaged, the 1st gear can be set without engaging the second brake B2. However, the one-way clutch B3 cannot tolerate the power transmission reverse to the driving side, and therefore, when the second brake B2 is in the disengaged state, 1ST is a gear position where the engine brake does not work, and the second brake B2 Is engaged, the gear position is set so that the engine brake works. Note that 1ST in the D range is a gear position where engine braking does not work.
[0021]
[Table 1]
Next, a control device for controlling the engagement and disengagement of the first to third clutches CL1 to CL3 and the first and second brakes B1 and B2 will be described with reference to FIGS. 2 to 4 show the components of the control device, and these three figures constitute one control device. Further, among the oil passages in each drawing, those having a circled alphabet (A to Y) at the end means that they are connected to the oil passages having the same alphabet in other drawings. Further, the mark x in the figure means that the part is drained.
[0023]
The control device is supplied with hydraulic oil from a
In the control device, in addition to the
[0024]
In the following, the
[0025]
Each valve is operated according to the operation of the
[0026]
[Table 2]
The above control will be described below.
First, consider a case where the D range (forward range) is set by the shift lever and the
[0028]
The hydraulic oil having the line pressure P1 sent to the
[0029]
On the other hand, the branch oil passage 103a of the
The
[0030]
As described above, the line pressure P1 is supplied to each of the solenoid valves SA to SF, and the supply control of the hydraulic oil having the line pressure P1 can be performed by controlling the opening and closing of these valves.
[0031]
Here, first, the case of setting the 1st gear position will be described. Note that, as shown in Table 2, the solenoid valves SF are not involved in setting the shift speed, so here, only the solenoid valves SA to SE will be considered.
In 1ST, as shown in Table 2, the solenoid valve SC is on, the others are off, only the solenoid valve SA is opened, and the other solenoid valves are closed. When the solenoid valve SA is opened, the line pressure P1 is supplied from the
[0032]
The
[0033]
Note that the second clutch CL2 is connected to the drain from the relief valve 55 (at this time, the
[0034]
Next, a case where a 2ND speed stage is set will be considered. At this time, the solenoid valve SD switches from off to on, and the solenoid valve SD is also opened. Accordingly, the line pressure P1 is supplied from the
[0035]
When setting the 3RD speed stage, the solenoid valve SC is switched from ON to OFF, and the solenoid valve SD is returned to OFF. Since the solenoid valve SD returns to off, the first brake B1 is released. When the solenoid valve SC is turned off, it is opened, and the hydraulic oil having the line pressure P1 is supplied from the
At the same time, the line pressure P1 acts on the left side of the
[0036]
When setting the 4TH speed stage, the solenoid valve SB is switched from off to on and the solenoid valve SC is turned back on. Since the solenoid valve SC is turned back on, the third clutch CL3 is released. On the other hand, when the solenoid valve SB is turned on, the solenoid valve SB is opened, the line pressure P1 is supplied to the
[0037]
When setting the 5TH speed stage, the solenoid valve SA is switched from off to on and the solenoid valve SC is switched from on to off. When the solenoid valve SA is switched from off to on, the supply of the line pressure P1 to the
[0038]
The engagement control of each clutch and brake is performed as described above. Here, the engagement control in the case of shifting up is performed based on the time chart shown in FIG. 5 and the flowcharts shown in FIGS. Will be explained. As shown in the flowchart of FIG. 6, in step S2, it is determined whether or not a shift command has been output. When it is determined that the shift command has been output, it is further determined in step S4 whether or not the shift command is a shift-up command. You. In the case of a shift-up command, it is determined in step S6 whether or not the throttle opening θTH due to the accelerator operation is greater than a predetermined opening θa. If it is determined that θTH> θa, the process proceeds to step S10, where power-on shift-up is performed. Control is performed. On the other hand, if it is determined that θTH ≦ θa, the process proceeds to step S60, where power-off / shift-up control is performed.
[0039]
The power-on shift-up control is performed according to the flowcharts shown in FIGS. Here, as shown in the time chart, a case will be described in which a shift-up command from the second gear to the third gear is issued at time t0.
[0040]
In the power-on shift-up control, a solenoid valve SD for setting a second speed (previous stage) and a solenoid valve SC for setting a third speed (next stage) are controlled. The signals for determining the ON / OFF of the solenoid valves SD and SC and the duty ratio are hydraulic command signals referred to in the claims, and these hydraulic command signals are shown as SSD and SSC in the time chart. In the control flow of the solenoid valve SD shown in FIG. 7, in step S12, counting of the predetermined time T1 starts immediately after the output of the upshift command. At the same time, in the control flow of the solenoid valve SC shown in FIG. 8, in step S32, counting of the predetermined time T2 (> T1) starts immediately after the output of the upshift command. During this time, since the power is on, the turbine rotational speed NT gradually increases.
[0041]
When it is determined in step S14 on the solenoid valve SD side that the predetermined time T1 has elapsed (time t1), the process proceeds to step S16, and the first stage STO1 in the preceding stage is started. In the preceding first stage STO1, the solenoid valve SD is controlled at a low duty ratio as shown in the time chart. As a result, the engagement hydraulic pressure (hereinafter simply referred to as hydraulic pressure) PO of the first brake B1 in the fully engaged state gradually decreases, and the engagement force of the first brake B1 weakens. Slip occurs. Accordingly, the turbine rotational speed NT rises slightly (but not so much as to blow up) as compared with the case where no slip occurs (see turbine rotational acceleration αT). In the control device, the input / output rotation ratio of the first brake B1 (= the rotation speed of the
[0042]
On the other hand, if it is determined in step S34 on the solenoid valve SC side that the predetermined time T2 has elapsed (time t2), the process proceeds to step S36, and the next first stage STR1 is started. In the next first stage STR1, as shown in the time chart, the solenoid valve SC is turned off. As a result, the line pressure is supplied to the third clutch CL3 which has been in the disengaged state, the hydraulic pressure PR increases, and the invalid stroke of the third clutch CL3 is quickly filled. In the control device, the input / output rotational speed ratio of the third clutch CL3 (= the rotational speed of the
[0043]
While the ineffective stroke of the third clutch CL3 is being performed, the input / output speed ratio eCLO of the first brake B1 gradually decreases, and in step S18, it becomes equal to or less than the first predetermined value eCLO1 (<1.0). If it is determined that the time has come (time t3), the control of the solenoid valve SD advances to step S20, and shifts to the preceding second stage STO2. In the preceding second stage STO2, the actual input / output rotation speed ratio eCLO is fed back, and the hydraulic pressure of the first brake B1 required to match this to the target input / output rotation speed ratio is calculated. The solenoid valve SD is controlled at a duty ratio corresponding to the calculated hydraulic pressure. The target input / output speed ratio is a predetermined range in which the input / output speed ratio eCLO of the first brake B1 is close to 1.0 (a range in which the input / output speed ratio slightly larger than the first predetermined value eCLO1 is the lower limit). ). As a result, the first brake B1 is maintained in a state in which a slight slip has occurred, that is, in a state having a torque transmission capacity substantially equal to the input torque. For this reason, during the execution of the former second stage STO2, the turbine speed NT (engine speed) is prevented from rising.
[0044]
By performing such control of the preceding second stage STO2, the input / output rotational speed ratio eCLO of the first brake B1 becomes larger than the first predetermined value eCLO1 (approaching 1.0), and the second speed is increased in step S38. If it is determined that the predetermined value eCLO2 (<1.0) or more has been reached (time t4), the control of the solenoid valve SC proceeds to step S40, and counts a predetermined time (first predetermined time in claims) T4. At the same time, the process proceeds to step S42 to shift to the next second-stage first-half stage STR2a. At this time, the filling of the invalid stroke of the third clutch CL3 is almost finished, and the third clutch CL3 is in a state immediately before engagement or in a preliminary engagement state in which a very small amount of torque is transmitted.
[0045]
In the next stage the second year stage STR2a, by increasing the duty ratio of the solenoid valve SC, the hydraulic pressure PR of the third clutch CL3, the hydraulic enough to hold a third clutch CL3 into engagement state immediately before or pre-engagement state Set.
[0046]
If it is determined in step S44 that the predetermined time T4 has elapsed (time t5), the control of the solenoid valve SC proceeds to step S46, and shifts to the next second stage STR2b. In the next second stage STR2b, the duty ratio of the solenoid valve SC is gradually reduced from the duty ratio of the first stage STR2a, and the hydraulic pressure PR of the third clutch CL3 is maintained in the state immediately before engagement or in the preliminary engagement state. The pressure is increased at a substantially constant rate of change (first predetermined rate of change in claims).
[0047]
Here, according to the hydraulic pressure PR of the third clutch CL3 increases, while the distribution ratio of the input torque of the third clutch CL3 increases, distribution ratio of the first brake B1 is lowered. Therefore, heat generation and wear in the first brake B1 in the slip state are suppressed.
[0048]
In this way, the input / output rotational speed ratio eCLO of the first brake B1 gradually approaches 1.0, and when the hydraulic pressure PR of the third clutch CL3 increases to some extent, the turbine rotational speed NT decreases relatively largely, while the output rotational speed decreases. Since the inertia does not significantly decrease, the input / output rotational speed ratio eCLO of the first brake B1 exceeds 1.0. At this time, the acceleration G of the vehicle body slightly changes.
[0049]
When it is determined in step S22 and step S48 that the input / output rotation speed ratio eCLO has become equal to or greater than the third predetermined value eCLO3 (> 1.0) (time t6), the process proceeds to step S24 and step S50, respectively. In step S24, the control of the solenoid valve SD shifts to the third stage of the preceding stage (the last stage of the preceding stage) STO3. In the preceding third stage STO3, the solenoid valve SD is turned off and the first brake B1 is released.
[0050]
On the other hand, in step S50, the control of the solenoid valve SC shifts to the next third stage STR3. In the next third stage STR3, the duty ratio of the solenoid valve SC is set so that the input / output rotational speed ratio eCLR of the third clutch CL3 approaches 1.0 at a constant rate of change (a second predetermined rate of change in the claims). Ratio controlled. Thus, the hydraulic pressure PR of the third clutch CL3 gradually increases, and the turbine speed NT gradually decreases.
[0051]
When it is determined in step S52 that the input / output rotation speed ratio eCLR of the third clutch CL3 has become equal to or greater than the fourth predetermined value eCLR1 (time t7), the control of the solenoid valve SC proceeds to step S54, where the control proceeds to step S54. The count of the second predetermined time (T5) in the claims is started. During this time, the control of the next-stage third stage STR3 is continued. If it is determined in step S56 that the predetermined time T5 has elapsed, the process proceeds to step S58, and the next-stage fourth stage (the next-stage final stage in the claims) STR4 Proceed to. In the next fourth stage STR4, the solenoid valve SC is turned off and the third clutch CL3 is completely engaged (time t8). Thereafter, the turbine speed NT gradually increases in accordance with the throttle opening θTH.
[0052]
Although it is not easy to determine that the input / output rotation speed ratio eCLR has become 1.0, it is expected that the input / output rotation speed ratio eCLR will become approximately 1.0 after the input / output rotation speed ratio eCLR becomes the fourth predetermined value eCLR1. by completely engage the third clutch CL3 with the lapse of a predetermined time period T5, without performing the determination, and the third clutch CL3 no shock can be fully engaged.
Thus, the switching from the second gear to the third gear in the power-on state is completed (step S12).
[0053]
On the other hand, the power-off shift-up control is also controlled according to the same flowcharts as those shown in FIGS. The time chart of FIG. 9 shows a case where the accelerator is returned in the middle of the preceding first stage STO1. In this case, the first stage STO1 in the previous stage in the power-on shift-up control is switched to the first stage STO1 in the first stage in the power-off shift-up control at the time t1 'when the accelerator is returned.
[0054]
In the power-off state, the input torque is smaller than that in the power-on state. And the duty ratio of the solenoid valve SC in the next third stage STR3 is set lower. Also, the setting of each predetermined value is slightly different from the case of power-on. In particular, after the predetermined times T1 and T2 are set to 0 (zero) and the upshift command is output, the slip control of the first brake B1 (the first-stage first stage STO1) is started immediately, and almost simultaneously with the third clutch B1. It is desirable to start the invalid stroke filling control (the next stage first stage STR1). In this way, the time required for the shift control can be reduced.
[0055]
Then, when the switching between the power-on shift-up control and the power-off shift-up control is performed in the middle of each stage, it is possible to engage the same stage as the stage engaged before the switching ( That is, it is necessary to prevent the control from starting again from the beginning of the flowchart after the switching by the above switching). For this reason, it is desirable to provide a step in the flowchart for setting a flag for indicating the elapse of the predetermined times T1 and T2 and each time each stage ends. For example, in the control as shown in FIG. 9, if a flag indicating the elapse of the predetermined time T1 is set, the pre- release stage STO1 is started simultaneously with the switching, and the counting of the predetermined time T2 is continued.
[0056]
In the above embodiment, the input / output rotation ratio is defined as (output shaft rotation speed × gear ratio / input shaft rotation speed), and the input / output rotation ratio is changed from a small value to a large value. Although the case where the stage is configured has been described, in the transmission control device of the present invention, the input / output rotation ratio is defined as (input shaft rotation speed × gear ratio / output shaft rotation speed). The stage may be configured such that changes from a large value to a small value.
[0057]
【The invention's effect】
As described above, in the speed change control device of the present invention, almost immediately at the same time when the first stage of the previous stage begins to slip on the former stage engagement element, the next stage first stage performs the reduction of the invalid stroke of the next stage engagement element, After the input / output rotational speed ratio of the previous stage engagement element has reached the second predetermined value after passing through the first predetermined value (invalid stroke reduction is almost completed), the process immediately shifts to the next stage second stage and proceeds to the next stage engagement element. Is gradually increased. For this reason, the input torque is borne only by the previous-stage engagement element only during the short time period during which the invalid stroke of the next-stage engagement element is reduced. To share the input torque. Therefore, heat generation and wear of the former-stage engagement element are suppressed as compared with the conventional case in which the vehicle continues to slip while bearing the entire input torque. By using the input / output rotational speed ratio of each engagement element in this manner, the engagement control of each engagement element can be performed independently, and the control accuracy can be improved.
[0058]
When the process proceeds to the second stage of the preceding stage, the preceding stage engaging element is maintained in a state where a slight slip has occurred. Therefore, it is possible to reliably prevent the input rotation (engine rotation) from rising.
[0059]
Moreover, in the present shift control device, after the input / output rotation ratio of the previous-stage engagement element has reached the third predetermined value, that is, the engagement hydraulic pressure of the next-stage engagement element has increased to some extent, and the input torque share ratio has been reduced. After the size becomes larger, the process shifts to the last stage of the previous stage to release the previous stage engaging element, and shifts to the minimum stage of the next stage to completely engage the next stage engaging element. For this reason, it is possible to suppress the occurrence of a shock when the next-stage engagement element is completely engaged.
[0060]
Further, after outputting a hydraulic pressure command signal for holding the next-stage engagement element at a predetermined hydraulic pressure for a first predetermined time, a hydraulic command signal for increasing the engagement operating hydraulic pressure of the next-stage engagement element at a first predetermined change rate is output. Since the next-stage second stage is configured to output the output, it is possible to prevent a change in hydraulic pressure of the next-stage engagement element at the time of transition from the next-stage first stage to the next-stage second stage, and to achieve a smooth shift. Control can be performed.
[0061]
Further, after the input / output rotation speed ratio of the front-stage engagement element in the second stage of the front-stage reaches a third predetermined value, the process proceeds to the third stage of the next stage to reduce the engagement hydraulic pressure of the next-stage engagement element to the next-stage third stage. The stage is further raised from the end of the two stages, the input / output rotation ratio of the next stage engaging element is brought as close as possible to 1.0, and the process shifts to the last stage of the previous stage to release the former stage engaging element. By shifting to the final stage and engaging the next stage engaging element, it is possible to switch gears with less shock.
Instead of using the third predetermined value, the engagement state of this engagement element may be confirmed based on the input / output rotation ratio of the next engagement element, and the previous engagement element may be released.
[0062]
Further, when the input / output rotation ratio of the next-stage engagement element in the next-stage third stage reaches a fourth predetermined value smaller than 1.0, the second-stage engagement element is completely removed when a second predetermined time has elapsed. If the input / output rotational speed ratio of the next-stage engagement element is set to the fourth predetermined value and is expected to become approximately 1.0 after the engagement is set as the second predetermined time, The next-stage engagement element can be completely engaged without a shock without directly determining whether the input / output rotation speed ratio has become 1.0.
[Brief description of the drawings]
FIG. 1 is a schematic diagram showing a configuration of an automatic transmission in which a shift control is performed by a shift control device according to the present invention.
FIG. 2 is a hydraulic circuit diagram of a transmission control device according to the present invention.
FIG. 3 is a hydraulic circuit diagram of a transmission control device according to the present invention.
FIG. 4 is a hydraulic circuit diagram of the transmission control device according to the present invention.
FIG. 5 is a graph showing changes over time of various variables in power-on shift-up control by the shift control device according to the present invention.
FIG. 6 is a flowchart showing shift control contents by a shift control device according to the present invention.
FIG. 7 is a flowchart showing shift control contents by a shift control device according to the present invention.
FIG. 8 is a flowchart showing shift control contents by a shift control device according to the present invention.
FIG. 9 is a graph showing changes over time of various variables in power-off / upshift control by the shift control device according to the present invention.
[Explanation of symbols]
3
Claims (3)
前記前段係合要素の係合作動油圧を速やかに低下させるような油圧指令信号を出力する前段第1ステージと、
前記前段係合要素が所定範囲内の入出力回転数比(=出力回転数/入力回転数)でスリップする状態に維持されるように、前記前段係合要素の係合作動油圧を制御する油圧指令信号を出力する前段第2ステージと、
前記次段係合要素の無効ストローク詰めを行わせるのに必要な高圧の油圧指令信号を出力する次段第1ステージと、
前記次段係合要素の係合作動油圧を、所定油圧から第1所定変化率で増加させる油圧指令信号を出力する次段第2ステージと、
前記前段係合要素を解放させるような油圧指令信号を出力する前段最終ステージと、
前記次段係合要素を係合させるような油圧指令信号を出力する次段最終ステージとを有し、
前記シフトアップ指令の出力後に、前記前段および次段第1ステージを開始し、 前記前段第1ステージにおいて前記前段係合要素の入出力回転数比が第1所定値になったときに、前記前段第1ステージから前記前段第2ステージに移行し、
前記前段第2ステージにおいて前記前段係合要素の入出力回転数比が前記第1所定値よりも大きい第2所定値になったときに、前記次段第1ステージから前記次段第2ステージに移行し、
前記前段第2ステージにおいて前記前段係合要素の入出力回転数比が前記第2所定値より大きい第3所定値になった後、前記前段第2ステージから前記前段最終ステージに移行するとともに、前記次段第2ステージから前記次段最終ステージに移行するように構成され、
前記第1所定値が1.0より小さな値であり、前記第2所定値が前記第1所定値より大きく且つ1.0より小さな値であり、前記第3所定値が1.0より大きい値であり、
前記次段第2ステージは、前記次段係合要素の係合作動油圧を前記所定油圧に保持する油圧指令信号を第1所定時間出力してから、この次段係合要素の係合作動油圧を前記第1所定変化率で増加させる油圧指令信号を出力することを特徴とする自動変速機の変速制御装置。A plurality of power transmission paths formed between the input / output members, a plurality of engagement elements for selectively setting the power transmission paths, and an engagement hydraulic pressure of the engagement elements controlled in accordance with a hydraulic command signal. From the previous stage to the next stage by disengaging the previous stage engagement element and engaging the next stage engagement element among the plurality of engagement elements based on a predetermined shift-up command. In a shift control device for an automatic transmission that performs a shift-up control of
A first-stage first-stage that outputs a hydraulic command signal that quickly reduces the engagement hydraulic pressure of the first-stage engagement element;
A hydraulic pressure for controlling the engagement hydraulic pressure of the front engagement element so that the front engagement element is maintained in a state of slipping at an input / output rotation speed ratio (= output rotation speed / input rotation speed) within a predetermined range. A second stage prior to outputting a command signal;
A next-stage first stage that outputs a high-pressure hydraulic command signal necessary to cause the invalid stroke of the next-stage engagement element to be reduced;
A next-stage second stage that outputs a hydraulic command signal for increasing the engagement hydraulic pressure of the next-stage engagement element from a predetermined oil pressure at a first predetermined change rate;
A pre-stage final stage that outputs a hydraulic command signal such as to release the pre-engagement element,
A next-stage final stage that outputs a hydraulic command signal such as to engage the next-stage engagement element,
After the output of the shift-up command, the first stage and the next stage are started. When the input / output rotation ratio of the front engagement element has reached a first predetermined value in the first stage, the first stage The first stage shifts to the previous second stage,
When the input / output rotation ratio of the front-stage engagement element has reached a second predetermined value that is greater than the first predetermined value in the front-stage second stage, the next-stage first stage is switched to the next-stage second stage. Migrate,
After the input / output rotation ratio of the front-stage engagement element has reached a third predetermined value larger than the second predetermined value in the front-stage second stage, the process proceeds from the front-stage second stage to the front-stage final stage, and Configured to shift from the next second stage to the next final stage ,
The first predetermined value is a value smaller than 1.0, the second predetermined value is a value larger than the first predetermined value and smaller than 1.0, and the third predetermined value is a value larger than 1.0. And
The next-stage second stage outputs a hydraulic command signal for maintaining the engagement hydraulic pressure of the next-stage engagement element at the predetermined hydraulic pressure for a first predetermined time, and then outputs the engagement hydraulic pressure of the next-stage engagement element. A shift control device for an automatic transmission, which outputs a hydraulic command signal for increasing the pressure at the first predetermined change rate .
前記前段第2ステージにおいて前記前段係合要素の入出力回転数比が前記第3所定値になったときに、前記次段第2ステージから前記次段第3ステージに移行し、その後前記次段最終ステージに移行することを特徴とする請求項1に記載の自動変速機の変速制御装置。The next-stage third output unit outputs a hydraulic command signal for controlling the engagement hydraulic pressure of the next-stage engagement element so that the input / output rotation speed ratio of the next-stage engagement element approaches 1.0 at the second predetermined change rate. Has a stage,
When the input / output rotational speed ratio of the front-stage engagement element has reached the third predetermined value in the front-stage second stage, a transition is made from the next-stage second stage to the next-stage third stage, and then the next-stage shift control system for an automatic transmission according to claim 1, characterized in that the process proceeds to the final stage.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP10178195A JP3571409B2 (en) | 1995-04-03 | 1995-04-03 | Transmission control device for automatic transmission |
| US08/626,892 US5704874A (en) | 1995-04-03 | 1996-04-03 | Shift control method for automatic transmission |
| EP96302398A EP0736705B1 (en) | 1995-04-03 | 1996-04-03 | Shift control method for automatic transmission |
| DE69613886T DE69613886T2 (en) | 1995-04-03 | 1996-04-03 | Shift control method for automatic transmission |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP10178195A JP3571409B2 (en) | 1995-04-03 | 1995-04-03 | Transmission control device for automatic transmission |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH08277921A JPH08277921A (en) | 1996-10-22 |
| JP3571409B2 true JP3571409B2 (en) | 2004-09-29 |
Family
ID=14309743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10178195A Expired - Fee Related JP3571409B2 (en) | 1995-04-03 | 1995-04-03 | Transmission control device for automatic transmission |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US5704874A (en) |
| EP (1) | EP0736705B1 (en) |
| JP (1) | JP3571409B2 (en) |
| DE (1) | DE69613886T2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4424456A1 (en) * | 1994-07-12 | 1996-01-18 | Zahnradfabrik Friedrichshafen | Method for controlling an automatic transmission |
| DE4442991A1 (en) * | 1994-12-02 | 1996-06-05 | Zahnradfabrik Friedrichshafen | Automatic drive |
| JP2932427B2 (en) * | 1996-09-25 | 1999-08-09 | 本田技研工業株式会社 | Control device for automatic transmission for vehicles |
| EP0833081B1 (en) * | 1996-09-25 | 2007-08-15 | Honda Giken Kogyo Kabushiki Kaisha | Control apparatus for hydraulically operated vehicular transmission |
| US5964675A (en) * | 1997-08-29 | 1999-10-12 | Honda Giken Kogyo Kabushiki Kaisha | Gear ratio shift control system for automatic vehicle transmission |
| JP4737385B2 (en) * | 2005-03-30 | 2011-07-27 | マツダ株式会社 | Control device for automatic transmission |
| JP6147127B2 (en) * | 2013-07-25 | 2017-06-14 | 株式会社エフ・シー・シー | Saddle riding |
| AT514918B1 (en) * | 2014-07-01 | 2015-05-15 | Avl List Gmbh | METHOD FOR CONTROLLING A SWITCHING OUT OF A MULTIPLE AUTOMATIC GEARBOX |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0751984B2 (en) * | 1986-04-18 | 1995-06-05 | 三菱自動車工業株式会社 | Shift control system for automatic transmissions for vehicles |
| US4796490A (en) * | 1987-12-22 | 1989-01-10 | General Motors Corporation | Event sequenced clutch-to-clutch downshift for an electronically controlled transmission |
| JPH01283453A (en) * | 1988-05-09 | 1989-11-15 | Honda Motor Co Ltd | Gear change control method for automatic transmission |
| DE68919936T2 (en) | 1988-08-06 | 1995-05-04 | Honda Motor Co Ltd | Gear shift control device in automatic transmissions. |
| US5165308A (en) * | 1989-11-04 | 1992-11-24 | Toyota Jidosha Kabushiki Kaisha | Shift control system and method for automatic transmissions |
| US5014573A (en) * | 1989-12-11 | 1991-05-14 | General Motors Corporation | Double transition upshift control in an automatic transmission |
| US5072390A (en) * | 1989-12-26 | 1991-12-10 | General Motors Corporation | Adaptive control of an automatic transmission |
| US5058460A (en) * | 1990-01-11 | 1991-10-22 | General Motors Corporation | Clutch-to-clutch control in an automatic transmission |
| US5046383A (en) * | 1990-07-16 | 1991-09-10 | General Motors Corporation | Acceleration-based control of power-on clutch-to-clutch upshifting in an automatic transmission |
| US5151858A (en) * | 1990-10-05 | 1992-09-29 | Saturn Corporation | Multiple mode adaptive pressure control for an automatic transmission |
| US5311795A (en) * | 1991-06-17 | 1994-05-17 | Mazda Motor Corporation | Control system with band brake actuator for automatic transmission |
| JP2991390B2 (en) * | 1992-03-16 | 1999-12-20 | トヨタ自動車株式会社 | Hydraulic control device for automatic transmission |
| US5443427A (en) * | 1992-06-23 | 1995-08-22 | Honda Giken Kogyo Kabushiki Kaisha | Apparatus for controlling automatic transmission |
| JP2767366B2 (en) * | 1993-08-30 | 1998-06-18 | 本田技研工業株式会社 | Control device for hydraulically operated transmission for vehicles |
| US5468198A (en) * | 1994-03-04 | 1995-11-21 | Chrysler Corporation | Method of controlling coastdown and coastdown/tip-in in an automatic transmission |
| US5551930A (en) * | 1995-04-13 | 1996-09-03 | Caterpillar Inc. | Adaptive control method for an automatic transmission |
-
1995
- 1995-04-03 JP JP10178195A patent/JP3571409B2/en not_active Expired - Fee Related
-
1996
- 1996-04-03 DE DE69613886T patent/DE69613886T2/en not_active Expired - Fee Related
- 1996-04-03 US US08/626,892 patent/US5704874A/en not_active Expired - Fee Related
- 1996-04-03 EP EP96302398A patent/EP0736705B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP0736705A3 (en) | 1998-03-04 |
| EP0736705B1 (en) | 2001-07-18 |
| DE69613886T2 (en) | 2001-10-31 |
| JPH08277921A (en) | 1996-10-22 |
| US5704874A (en) | 1998-01-06 |
| DE69613886D1 (en) | 2001-08-23 |
| EP0736705A2 (en) | 1996-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH11201271A (en) | Jumping downshift control device of automatic transmission | |
| JP3614928B2 (en) | Shift control device for automatic transmission | |
| JP4012581B2 (en) | Shift control method for automatic transmission | |
| US5655993A (en) | Shift control apparatus for an automatic transmission | |
| JP3634947B2 (en) | Neutral control device for automatic transmission | |
| JP3571409B2 (en) | Transmission control device for automatic transmission | |
| KR100496360B1 (en) | Shift control apparatus for automatic transmission | |
| JP4012582B2 (en) | Shift control method for automatic transmission | |
| US5857935A (en) | Upshift control device for automatic transmission | |
| JP3563805B2 (en) | Transmission control device for automatic transmission | |
| JP4492099B2 (en) | Hydraulic control device for automatic transmission | |
| JP3479180B2 (en) | Transmission control device for automatic transmission | |
| JPH08334169A (en) | Speed change control device for automatic transmission | |
| JP3657648B2 (en) | Shift control device for automatic transmission | |
| JPH0460267A (en) | Speed change control device of automatic transmission | |
| JP2641007B2 (en) | Shift control device for automatic transmission for vehicle | |
| JPH10318364A (en) | Select controller for automatic transmission | |
| JPH1047469A (en) | Up-shifting control device for automatic transmission | |
| JP3938840B2 (en) | Control device for prohibiting re-transmission of automatic transmission | |
| JP4123708B2 (en) | Control device for automatic transmission | |
| JPH07111217B2 (en) | Shift control device for automatic transmission | |
| JP2016114087A (en) | vehicle | |
| JP3302083B2 (en) | Transmission control device for automatic transmission | |
| JPH11159603A (en) | Control device of automatic transmission | |
| JPH0634023A (en) | Speed change controller of automatic transmission for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040406 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040622 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040624 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080702 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090702 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |