(実施の形態1)
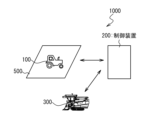
本発明の本実施の形態による作業領域管理システム1000を、図面を参照して説明する。本実施の形態において、図1に示すように、作業領域管理システム1000は、第1作業装置100と、制御装置200と、第2作業装置300とを備える。第1作業装置100と、第2作業装置300とは、圃場500内を自律的に移動して作業を行うことができる。制御装置200は、第1作業装置100と、第2作業装置300とに通信可能に接続され、第1作業装置100と、第2作業装置300とが圃場500内で移動する作業経路を決定する。
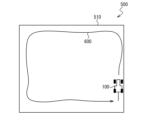
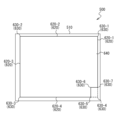
第1作業装置100、例えばトラクターは、図2に示すように、作業を行う領域を表す作業領域を制御装置200に登録するために、作業者の操縦により圃場500の輪郭510に沿って1回周回する。例えば、制御装置200は、第1作業装置100が周回移動した経路を表す登録経路600に囲まれた領域を作業領域として登録し、登録された作業領域内を第1作業装置100が移動する作業経路を決定する。第1作業装置100は、決定された作業経路に沿って、作業領域、例えば圃場500内を移動して作業を行う。
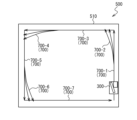
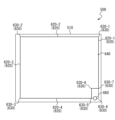
第1作業装置100と異なる第2作業装置300、例えばコンバインも、作業を行う領域を表す作業領域を制御装置200に登録するために、図3に示すように、作業者の操作により圃場500の輪郭510に沿って1回周回する。例えば、第2作業装置300は、圃場500に栽培された作物を収穫するため、輪郭510に沿った第1登録経路700-1を通り、作物を収穫する。第2作業装置300は、圃場500の端に到達すると、前進と後退を繰り返して、圃場500の内方にずれる第2登録経路700-2で作物を収穫し、進行方向を変更する領域を確保する。その後、第2作業装置300は、進行方向を変更して、輪郭510に沿った第3登録経路700-3を通り、作物を収穫する。同様に、第2作業装置300は、前進と後退とを繰り返す第4登録経路700-4と、輪郭510に沿った第5登録経路700-5と、前進と後退とを繰り返す第6登録経路700-6と、輪郭510に沿った第7登録経路700-7とを順番に通り、圃場500を1回周回する。
制御装置200は、登録経路700に基づき、第2作業装置300の作業領域を登録し、登録された作業領域内を第2作業装置300が移動する作業経路を決定する。第2作業装置300は、決定された作業経路に沿って、作業領域、例えば圃場500内を移動して作業を行う。
このように、同じ圃場500における作業領域は、第1作業装置100と、第2作業装置300との両方で登録される。ここで、制御装置200は、第1作業装置100で登録された作業領域内に第2作業装置300の作業経路を決定し、ユーザ、例えば作業者による作業領域の登録作業を低減する。さらに、作業装置の機種に応じて、登録される作業領域の精度が異なる。このため、制御装置200は、作業経路を決定するときに、登録されている作業領域の精度に応じて、ユーザに警告を報知してもよい。
(作業領域管理システムの構成)
図1に示す作業領域管理システム1000に含まれる第1作業装置100の構成を説明する。第1作業装置100は、圃場500において作業を行う任意の装置を表し、作業機械、例えばロータリー耕耘機、施肥散布機などを牽引して作業を行うトラクターを含む。第1作業装置100は、作業機械と一体に構成された装置、例えば田植機、コンバインなどを含んでもよい。また、第1作業装置100は、飛行して作業を行う装置、例えば農薬を散布するドローンを含んでもよい。
第1作業装置100は、図4に示すように、キースイッチ110と、センサ115と、演算装置120と、通信装置130と、記憶装置140とを備える。キースイッチ110は、第1作業装置100のエンジンの起動と停止の信号を生成する。例えば、キースイッチ110が「ON」に設定されると、第1作業装置100のエンジンが起動され、エンジンが起動されたことを表す信号を演算装置120に出力する。キースイッチ110が「OFF」に設定されると、第1作業装置100のエンジンが停止され、エンジンが停止されたことを表す信号を演算装置120に出力する。キースイッチ110は、エンジンの起動と停止の指示を受け付ければよく、任意のスイッチで形成されてもよい。
センサ115は、第1作業装置100の状態を表す稼働情報を取得する。例えば、稼働情報は、第1作業装置100の位置を表す位置情報を含む。センサ115は、第1作業装置100の各時刻における位置を測定する測位装置を含む。測位装置は、例えば、GNSS(Global Navigation Satellite System)の受信機である。
また、稼働情報は、第1作業装置100の状態を表す状態情報、例えば第1作業装置100の速度、操舵角、エンジン回転数、各種クラッチのON/OFF状況などを含む。例えば、第1作業装置100が作業機械を牽引する車両であるとき、状態情報は、作業機械に動力を伝達するときのPTO(power take-off)回転数、作業機械の姿勢を示すヒッチ高さやリフトアーム角度などの情報を含んでもよい。この場合、センサ115は、各情報を測定する測定装置を含む。
通信装置130は、制御装置200との通信を行う。通信装置130は、制御装置200から取得する情報を演算装置120に転送する。また、通信装置130は、演算装置120が生成した信号を制御装置200に転送する。通信装置130は、例えば、無線LAN(Local Area Network)やセルラーネットワークなどの無線通信に用いられる送受信機、NIC(Network Interface Card)、USB(Universal Serial Bus)などの種々のインタフェースを含む。
記憶装置140は、第1作業装置100を制御するための様々なデータ、例えば第1駆動制御プログラム400を格納する。記憶装置140は、第1駆動制御プログラム400を記憶する非一時的記憶媒体(non-transitory tangible storage medium)として用いられる。第1駆動制御プログラム400は、コンピュータ読み取り可能な記憶媒体1に記録されたコンピュータプログラム製品(computer program product)として提供されてもよく、または、サーバからダウンロード可能なコンピュータプログラム製品として提供されてもよい。
演算装置120は、第1駆動制御プログラム400を記憶装置140から読み出し実行して、第1作業装置100を制御するための様々なデータ処理を行う。例えば、演算装置120は、中央演算処理装置(CPU;Central Processing Unit)、エンジンコントロールユニット(ECU;Engine Control Unit)などを含む。
演算装置120は、第1駆動制御プログラム400を読み出し実行することで、図5に示すように、第1駆動制御部150を実現する。第1駆動制御部150は、第1作業装置100が指定された経路に沿って移動するように、第1作業装置100の速度、進行方向などを制御する。
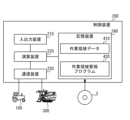
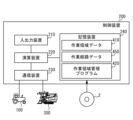
次に、図1に示す制御装置200の構成を説明する。制御装置200は、図6に示すように、入出力装置210と、演算装置220と、通信装置230と、記憶装置240とを備える。制御装置200は、コンピュータ、例えばタブレットなどの携帯端末を含む。入出力装置210には、演算装置220が処理を実行するための情報が入力される。また、入出力装置210は、演算装置220が処理を実行した結果を出力する。入出力装置210は、様々な入力装置と出力装置とを含み、例えば、キーボード、マウス、マイク、ディスプレイ、スピーカー、タッチパネルなどを含む。
通信装置230は、複数の作業装置、例えば第1作業装置100と第2作業装置300との通信を行う。通信装置230は、第1作業装置100または第2作業装置300から取得する情報を演算装置220に転送する。また、演算装置220が生成した信号を第1作業装置100または第2作業装置300に転送する。通信装置230は、例えば、無線LAN(Local Area Network)やセルラーネットワークなどの無線通信に用いられる送受信機、NIC(Network Interface Card)、USB(Universal Serial Bus)などの種々のインタフェースを含む。
記憶装置240は、複数の作業装置、例えば第1作業装置100と、第2作業装置300とが作業を行うときの作業経路を決定するための様々なデータ、例えば作業領域データ410と、作業領域管理プログラム420とを格納する。記憶装置240は、作業領域管理プログラム420を記憶する非一時的記憶媒体(non-transitory tangible storage medium)として用いられる。作業領域管理プログラム420は、コンピュータ読み取り可能な記憶媒体2に記録されたコンピュータプログラム製品(computer program product)として提供されてもよく、または、サーバからダウンロード可能なコンピュータプログラム製品として提供されてもよい。
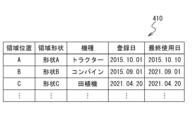
作業領域データ410は、複数の作業装置により作業が行われる作業領域に関する領域情報を格納する。例えば、作業領域データ410は、図7に示すように、登録された作業領域ごとに、領域位置と、領域形状と、作業装置の機種と、登録日と、最終使用日とを格納する。領域位置は、登録された作業領域の位置を表し、例えば、作業領域の幾何中心を表す。領域形状は、登録された作業領域の形状を表し、例えば、作業領域の輪郭の複数の頂点の緯度、経度を表す。領域位置は、作業領域の輪郭の複数の頂点の位置により表されてもよい。
作業装置の機種は、作業領域が登録されるときに用いられた作業装置の機種を表す。例えば、第1作業装置100が圃場500の輪郭510に沿って移動することで作業領域が登録されたとき、この作業領域に対する作業装置の機種は、第1作業装置100の機種、例えばトラクターを表す。
登録日は、作業領域が登録された日付を表す。最終使用日は、対応する領域情報を用いて作業経路が決定された日付のうち、最終の日付を表す。
図6に示す演算装置220は、作業領域管理プログラム420を記憶装置240から読み出し実行して、作業装置の作業経路を決定するための様々なデータ処理を行う。例えば、演算装置220は、中央演算処理装置(CPU;Central Processing Unit)などを含む。
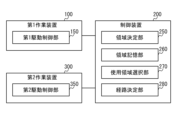
演算装置220は、作業領域管理プログラム420を読み出し実行することで、図5に示すように、領域決定部250と、領域記憶部260と、使用領域選択部270と、経路決定部280とを実現する。領域決定部250は、作業装置、例えば第1作業装置100の測定された測位位置に基づき、作業装置が作業を行う作業領域を決定する。領域記憶部260は、領域決定部250により決定された作業領域を表す領域情報を作業領域データ410に記憶する。使用領域選択部270は、作業装置、例えば第2作業装置300の作業経路を決定するときに使用する領域情報を選択する。経路決定部280は、領域情報に基づき、作業装置、例えば第1作業装置100または第2作業装置300が圃場500において作業を行うための作業経路を決定する。
次に、図1に示す第2作業装置300の構成を説明する。第2作業装置300は、圃場500において作業を行い、第1作業装置100と異なる任意の装置を表す。第2作業装置300により行われる作業は、第1作業装置100により行われる作業と異なってもよく、同じでもよい。第2作業装置300は、作業機械と一体に構成された装置、例えばコンバインを含む。第2作業装置300は、田植機を含んでもよい。また、第2作業装置300は、作業機械、例えばロータリー耕耘機、施肥散布機などを牽引して作業を行うトラクターを含んでもよい。第2作業装置300は、飛行して作業を行う装置、例えば農薬を散布するドローンを含んでもよい。
第2作業装置300は、図8に示すように、キースイッチ310と、センサ315と、演算装置320と、通信装置330と、記憶装置340とを備える。キースイッチ310は、第1作業装置100のキースイッチ110と同様に、第2作業装置300のエンジンの起動と停止の信号を生成する。例えば、キースイッチ310が「ON」に設定されると、第2作業装置300のエンジンが起動され、エンジンが起動されたことを表す信号を演算装置320に出力する。キースイッチ310が「OFF」に設定されると、第2作業装置300のエンジンが停止され、エンジンが停止されたことを表す信号を演算装置320に出力する。キースイッチ310は、エンジンの起動と停止の指示を受け付ければよく、任意のスイッチで形成されてもよい。
センサ315は、第1作業装置100のセンサ115と同様に、第2作業装置300の状態を表す稼働情報を取得する。例えば、稼働情報は、第2作業装置300の位置を表す位置情報と、第2作業装置300の状態を表す状態情報とを含む。
通信装置330は、第1作業装置100の通信装置130と同様に、制御装置200との通信を行う。通信装置330は、制御装置200から取得する情報を演算装置320に転送する。また、通信装置330は、演算装置320が生成した信号を制御装置200に転送する。
記憶装置340は、第1作業装置100の記憶装置140と同様に、第2作業装置300を制御するための様々なデータ、例えば第2駆動制御プログラム430を格納する。記憶装置340は、第2駆動制御プログラム430を記憶する非一時的記憶媒体(non-transitory tangible storage medium)として用いられる。第2駆動制御プログラム430は、コンピュータ読み取り可能な記憶媒体3に記録されたコンピュータプログラム製品(computer program product)として提供されてもよく、または、サーバからダウンロード可能なコンピュータプログラム製品として提供されてもよい。
演算装置320は、第1作業装置100の演算装置120と同様に、第2駆動制御プログラム430を記憶装置340から読み出し実行して、第2作業装置300を制御するための様々なデータ処理を行う。例えば、演算装置320は、中央演算処理装置(CPU;Central Processing Unit)、エンジンコントロールユニット(ECU;Engine Control Unit)などを含む。
演算装置320は、第2駆動制御プログラム430を読み出し実行することで、図5に示すように、第2駆動制御部350を実現する。第2駆動制御部350は、第2作業装置300が指定された経路に沿って移動するように、第2作業装置300の速度、進行方向などを制御する。
(作業領域管理システムの動作)
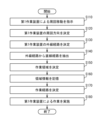
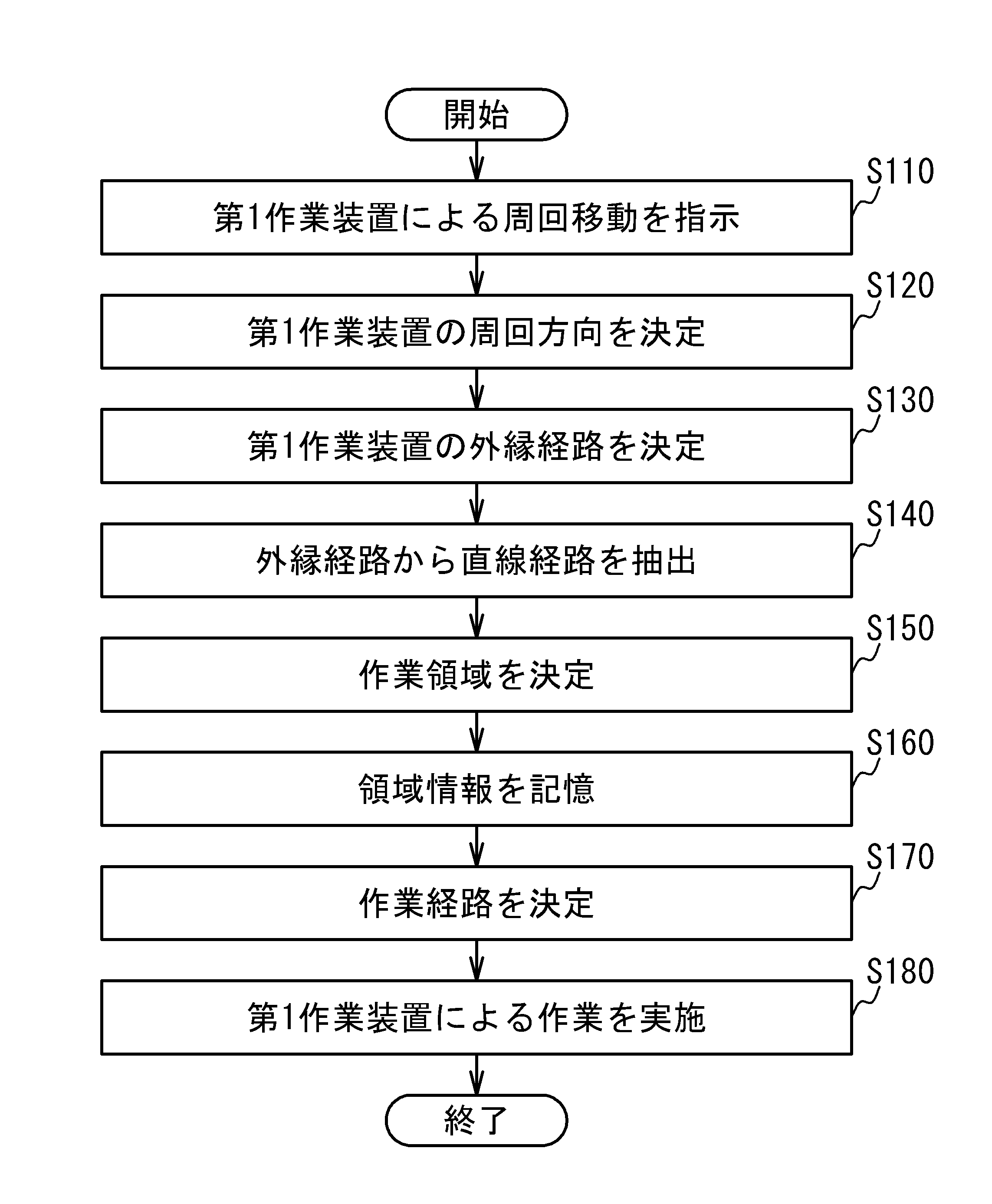
作業領域管理システム1000は、第1作業装置100が圃場500において自律的に作業を行うように、第1作業装置100を制御する。例えば、第1作業装置100が圃場500において作業を行うとき、ユーザは、制御装置200の入出力装置210に、第1作業装置100により作業を開始するための操作が入力される。制御装置200の演算装置220は、ユーザによる操作が入力されると、作業領域管理プログラム420を読み出し実行する。作業領域管理プログラム420が読み出し実行されると、演算装置220は、作業領域管理方法の一部である図9に示す処理を開始する。
ステップS110において、演算装置220により実現される領域決定部250は、図2、3に示すように、作業者に作業領域の輪郭、例えば圃場500の輪郭510に沿って1周する経路で、第1作業装置100を手動操縦で移動させることを指示する。作業者は、第1作業装置100を操縦して、作業領域の輪郭に沿って移動する。第1作業装置100の第1駆動制御部150は、第1作業装置100の各時刻における位置を測定し、測定された各時刻の測位位置を表す位置情報を制御装置200に出力する。また、第1駆動制御部150は、第1作業装置100の各時刻における状態を表す状態情報を制御装置200に出力する。制御装置200の領域決定部250は、位置情報と状態情報とを含む稼働情報を第1作業装置100から取得する。
図9に示すステップS120において、領域決定部250は、第1作業装置100の周回方向を決定する。例えば、領域決定部250は、第1作業装置100の各時刻における操舵角に基づき、第1作業装置100の周回方向を決定する。例えば、図2に示すように、第1作業装置100が左回りに作業領域を周回するとき、第1作業装置100の操舵角は左方を向いている頻度が高い。このため、領域決定部250は、第1作業装置100の各時刻における操舵角を積算することで、第1作業装置100の周回方向を決定する。
図9に示すステップS130において、領域決定部250は、第1作業装置100の周回方向と、位置情報とに基づき、第1作業装置100の外縁経路610を決定する。外縁経路610は、図10に示すように、第1作業装置100が登録経路600に沿って移動するときに、第1作業装置100の外縁が通る経路を表す。例えば、領域決定部250は、第1作業装置100の進行方向に直交する方向において、第1作業装置100の測位装置の位置から第1作業装置100の左端までの左側距離と、測位装置の位置から右端までの右側距離とを予め記憶している。領域決定部250は、第1作業装置100の周回方向が左周りのとき、登録経路600から、第1作業装置100の進行方向に対して右方向に右側距離だけ離れた経路を外縁経路610として決定する。第1作業装置100の周回方向が右周りのとき、登録経路600から、第1作業装置100の進行方向に対して左方向に左側距離だけ離れた経路を外縁経路610として決定する。左側距離と、右側距離とは、測位位置の位置から第1作業装置100の対応する端までの距離に所定の距離を加えて決定されてもよい。なお、登録経路600は、例えば、第1作業装置100の位置を、測定された時間の順番に直線状の線分でつないだ経路を表す。
図9に示すステップS140において、領域決定部250は、外縁経路610のうち、第1作業装置100が直線状に移動した直線経路を抽出する。領域決定部250は、任意の方法で直線経路を抽出する。例えば、領域決定部250は、第1作業装置100の旋回走行が終了した時点において、進行方向に延び、第1作業装置100の左端または右端を通る2つの直線に挟まれた領域を決定する。決定された領域に含まれる第1作業装置100の外縁経路610が閾値より長いとき、領域に含まれる第1作業装置100の外縁経路610が直線経路として抽出される。
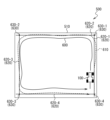
ステップS150において、領域決定部250は、第1作業装置100により作業が行われる作業領域を決定する。例えば、図10に示すように、領域決定部250は、抽出された直線経路に近似する近似直線620を決定する。領域決定部250は、決定された近似直線620のうち、時間的に隣接する2つの直線経路に対応する近似直線620が交差する頂点630を決定する。また、頂点630に、時間的に最後の直線経路に対応する近似直線620と、最初の直線経路に対応する近似直線620との交点が加えられる。領域決定部250は、決定された複数の頂点630を頂点とし、近似直線620に延在する辺を有する多角形を一時的な作業領域として決定する。領域決定部250は、決定された一時的な作業領域を表す情報を入出力装置210に表示して、ユーザによる作業領域の修正操作を受け付ける。領域決定部250は、ユーザによる修正操作に応じて、作業領域を修正する。
例えば、領域決定部250は、時間的に隣接する2つの直線経路に対応する近似直線620として、第1近似直線620-1と、第2近似直線620-2とを選択する。選択された第1近似直線620-1と、第2近似直線620-2とが交差する第1頂点630-1を決定する。同様に、領域決定部250は、第2近似直線620-2と第3近似直線620-3とを選択し、選択された2つの近似直線620が交差する第2頂点630-2を決定する。また、第3近似直線620-3と第4近似直線620-4とが交差する第3頂点630-3と、第4近似直線620-4と第1近似直線620-1とが交差する第4頂点630-4とが決定される。領域決定部250は、図11に示すように、第1頂点630-1と、第2頂点630-2と、第3頂点630-3と、第4頂点630-4とを頂点とし、近似直線620により囲まれた多角形を一時的な作業領域として決定する。
決定された一時的な作業領域を地図上に表した画像が入出力装置210に表示される。ユーザは、決定された一時的な作業領域が正しいとき、決定された一時的な作業領域を記憶する操作を入出力装置210に入力する。また、決定された一時的な作業領域が正しくないとき、ユーザは、作業領域の修正操作を入出力装置210に入力する。例えば、ユーザは、農道から圃場500への出入り口を作業領域から除外するために、図11に示すように、一時的な作業領域を修正する。具体的には、ユーザは、頂点630、例えば第5頂点630-5と、第6頂点630-6と、第7頂点630-7とを追加する操作を入力する。また、ユーザは、頂点630、例えば第4頂点630-4を削除する操作を入力する。領域決定部250は、入力された操作に基づき、一時的な作業領域を修正する。領域決定部250は、第1頂点630-1と、第2頂点630-2と、第3頂点630-3と、第5頂点630-5と、第6頂点630-6と、第7頂点630-7とを頂点とする多角形を作業領域640として決定する。
図9に示すステップS160において、領域記憶部260は、決定された作業領域640を表す領域情報を作業領域データ410に記憶する。例えば、領域記憶部260は、領域決定部250から作業領域640の位置と形状とを表す情報を取得して、取得された情報を作業領域データ410に記憶する。また、領域記憶部260は、作業領域640を表す情報に関連づけて、現在の日付を作業領域データ410に記憶する。
ステップS170において、経路決定部280は、決定された作業領域640に基づき、第1作業装置100が作業するための作業経路650を決定する。例えば、経路決定部280は、図12に示すように、作業領域640内を往復しながら作業を行う作業経路650を決定する。作業経路650は、例えば、互いに対抗する第4近似直線620-4と第2近似直線620-2との間を往復運動しながら、第1近似直線620-1から第3近似直線620-3に向かって移動する経路を表す。経路決定部280は、決定された作業経路650を表す経路情報を第1作業装置100に出力する。また、経路決定部280は、作業領域データ410において、作業領域640に対応する領域情報の最終使用日を、作業経路650を決定した日付に更新する。
図9に示すステップS180において、第1作業装置100の第1駆動制御部150は、取得された経路情報に表された作業経路650に沿って第1作業装置100が移動して作業するように、第1作業装置100を制御する。
このように、作業領域管理システム1000は、第1作業装置100の周回経路に基づき作業領域640を決定し、決定された作業領域640において第1作業装置100が作業を行うように第1作業装置100を制御する。
制御装置200の経路決定部280は、第1作業装置100を用いて登録された作業領域640に関する領域情報を使用して、圃場500において第2作業装置300が作業を行う作業経路を決定する。例えば、第2作業装置300が圃場500において作業を行うとき、ユーザは、制御装置200の入出力装置210に、第2作業装置300により作業を開始するための操作を入力する。制御装置200の演算装置220は、ユーザによる操作が入力されると、作業領域管理プログラム420を読み出し実行する。作業領域管理プログラム420が読み出し実行されると、演算装置220は、作業領域管理方法の一部である図13に示す処理を開始する。
ステップS210において、使用領域選択部270は、第2作業装置300の作業経路の決定に用いられる候補領域情報を受け付ける。例えば、使用領域選択部270は、作業領域データ410に格納された領域情報の一覧を入出力装置210に表示する。作業者は、表示された領域情報の一覧から、第2作業装置300の作業経路の決定に用いる領域情報を候補領域情報として選択する。
ステップS220において、使用領域選択部270は、候補領域情報が第2作業装置300の作業経路の決定に適しているかを判定する。候補領域情報が第2作業装置300の作業経路の決定に適しているとき、使用領域選択部270は、ステップS240の処理を実行する。候補領域情報が第2作業装置300の作業経路の決定に適していないとき、使用領域選択部270は、ステップS230の処理を実行する。
例えば、使用領域選択部270は、候補領域情報が所定の条件を満たすとき、候補領域情報が第2作業装置300の作業経路の決定に適していると判定する。例えば、所定の条件は、候補領域情報が登録された時から所定の期間以上経過していないことを含む。例えば、使用領域選択部270は、作業領域データ410から、図7に示す登録日を表す情報を取得する。登録日から所定の期間、例えば5年以上経過していないとき、使用領域選択部270は、候補領域情報が第2作業装置300の作業経路の決定に適していると判定する。
図7に示す例において、領域位置が「A」と「B」である領域情報は、登録されてから所定の期間以上経過しているため、第2作業装置300の作業経路の決定に適していないと判定される。また、領域位置が「C」である領域情報は、登録されてから所定の期間以上経過していないため、第2作業装置300の作業経路の決定に適していると判定される。作業領域640は変化する場合がある。例えば、作業領域640は、圃場500の合筆、分筆などによる圃場500の変化に応じて変化する。また、圃場500内の施設、例えば圃場500に第2作業装置300を進入させる出入口、取水口などの位置の変化により、作業領域640が変化する場合がある。所定の条件に候補領域情報が登録された時からの経過期間を含めることで、登録された後に変化してしまった作業領域640を用いることが低減される。
また、登録されてから所定の期間以上経過していても、最後に使用されてからの経過期間が短いとき、作業領域640が変化していない可能性が高い。このため、所定の条件は、候補領域情報が最後に使用された時から所定の期間以上経過していないことを含んでもよい。使用領域選択部270は、作業領域データ410から、図7に示す最終使用日を表す情報を取得する。最終使用日から所定の期間、例えば2年以上経過していないとき、使用領域選択部270は、候補領域情報が第2作業装置300の作業経路の決定に適していると判定する。
図7に示す例において、領域位置が「A」である領域情報は、使用されてから所定の期間以上経過しているため、第2作業装置300の作業経路の決定に適していないと判定される。また、領域位置が「B」と「C」である領域情報は、使用されてから所定の期間以上経過していないため、第2作業装置300の作業経路の決定に適していると判定される。
また、使用領域選択部270は、候補領域情報に表される作業領域640の精度に基づき、候補領域情報が第2作業装置300の作業経路の決定に適しているかを判定してもよい。例えば、図10に示す頂点630から外縁経路610までの距離が長いほど、作業領域640の頂点630の精度が低い場合がある。このため、使用領域選択部270は、図10に示す頂点630から外縁経路610までの距離に基づき、候補領域情報が第2作業装置300の作業経路の決定に適しているかを判定してもよい。例えば、使用領域選択部270は、頂点630から外縁経路610までの距離が閾値より小さいとき、候補領域情報が第2作業装置300の作業経路の決定に適していると判定する。この場合、作業経路の決定の適正を判定する所定の条件は、頂点630から外縁経路610までの距離が閾値より小さいことを含む。
例えば、図2、3に示すように、作業領域640の登録に用いた作業装置の機種に応じて、作業領域640の精度が異なる。例えば、トラクターを用いて登録した作業領域640より田植機を用いて登録した作業領域640の精度は高い場合が多い。また、田植機を用いて登録した作業領域640よりコンバインを用いて登録した作業領域640の精度は高い場合が多い。このため、使用領域選択部270は、作業領域データ410から、登録に用いられた作業装置の機種を取得して、第2作業装置300の作業経路の決定に適しているかを判定してもよい。
例えば、使用領域選択部270は、作業経路の決定に適しない機種の一覧を表す第1不適切機種群を記憶する。使用領域選択部270は、登録に用いられた作業装置の機種が第1不適切機種群に含まれるとき、候補領域情報が第2作業装置300の作業経路の決定に適していないと判定する。第1不適切機種群は、例えばトラクターを含んでもよい。この場合、作業経路の決定の適正を判定する所定の条件は、登録に用いられた作業装置の機種が第1不適切機種群に含まれないことを含む。
また、使用領域選択部270は、決定する作業経路の作業装置、例えば第2作業装置300の機種と、登録に用いられた作業装置の機種とに基づき、候補領域情報が第2作業装置300の作業経路の決定に適しているかを判定してもよい。例えば、使用領域選択部270は、決定する作業経路の作業装置に対して、作業経路の決定に適しない機種の一覧を表す第2不適切機種群を記憶する。使用領域選択部270は、決定する作業経路の第2作業装置300の機種を表す情報を取得する。例えば、第2作業装置300の機種を表す情報は、作業者により制御装置200の入出力装置210に入力されてもよく、第2作業装置300から取得されてもよい。使用領域選択部270は、第2作業装置300の機種に対応する第2不適切機種群を取得する。登録に用いられた作業装置の機種が第2不適切機種群に含まれるとき、候補領域情報が第2作業装置300の作業経路の決定に適していないと判定する。この場合、作業経路の決定の適正を判定する所定の条件は、登録に用いられた作業装置の機種が、決定する作業経路の第2作業装置300の機種に対応する第2不適切機種群に含まれないことを含む。
例えば、コンバインに対する作業経路を決定するとき、第2不適切機種群は、例えばトラクターと、田植機とを含んでもよい。また、田植機に対する作業経路を決定するとき、第2不適切機種群は、例えばトラクターを含んでもよい。トラクターに対する作業経路を決定するとき、第2不適切機種群は、何も含まなくてもよい。
使用領域選択部270は、複数の所定の条件のうち、すべてを満たすとき候補領域情報が第2作業装置300の作業経路の決定に適していると判定してもよく、一部を満たすとき候補領域情報が第2作業装置300の作業経路の決定に適していると判定してもよい。
候補領域情報が作業経路の決定に適していないと判定されたとき、図13に示すステップS230において、使用領域選択部270は、選択された候補領域情報が作業経路の決定に適していないことを表す警告情報を入出力装置210に出力して、作業者に報知する。警告情報は、適していないと判定された理由、例えば候補領域情報が満たさない条件を表す情報を含んでもよい。
ステップS240において、使用領域選択部270は、選択された候補領域情報を入出力装置210に出力する。例えば、使用領域選択部270は、選択された候補領域情報に表される作業領域640を地図上に表した画像を入出力装置210に表示する。作業者は、出力された候補領域情報を確認して、第2作業装置300の作業経路の決定に候補領域情報を用いるかを判断する。
ステップS250において、使用領域選択部270は、作業者による候補領域情報の使用の判断を受け付ける。作業者は、候補領域情報を用いると判断すると、候補領域情報を使用して作業経路を決定することを指示する操作を入出力装置210に入力する。また、作業者は、候補領域情報を用いないと判断すると、候補領域情報を使用しないことを表す操作を入出力装置210に入力する。候補領域情報を使用することを表す操作が入力されたとき、処理は、ステップS260に移行する。候補領域情報を使用しないことを表す操作が入力されたとき、処理は、ステップS210に戻り、処理を繰り返す。
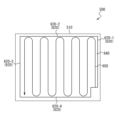
ステップS260において、経路決定部280は、候補領域情報に基づき、第2作業装置300が作業を行うための作業経路を決定する。例えば、経路決定部280は、図14に示すように、第1作業装置100を用いて登録された作業領域640において、第2作業装置300が作業を行うために移動する作業経路750を決定する。
例えば、作業経路750は、圃場500の輪郭510に沿って直線状に移動する第1作業経路750-1と、第3作業経路750-3と、第5作業経路750-5と、第7作業経路750-7とを含む。また、作業経路750は、前進と後退とを繰り返して、圃場500の内方にずれていく第2作業経路750-2と、第4作業経路750-4と、第6作業経路750-6とを含む。また、作業経路750は、圃場500の輪郭510に沿って周回しながら、圃場500の中心に向かって移動する第8作業経路750-8を含む。決定された作業経路750を表す経路情報は、第2作業装置300に出力される。また、経路決定部280は、作業領域データ410において、作業領域640に対応する領域情報の最終使用日を、作業経路750を決定した日付に更新する。
図13に示すステップS270において、第2作業装置300の第2駆動制御部350は、第2作業装置300が取得された経路情報に表された作業経路750に沿って移動して作業するように、第2作業装置300を制御する。例えば、第2駆動制御部350は、第2作業装置300が第1作業経路750-1から第8作業経路750-8までの経路に沿って移動するように、第2作業装置300を制御する。
このように、作業領域管理システム1000は、第1作業装置100の周回経路に基づき決定された作業領域640において、第2作業装置300が作業を行うように第2作業装置300を制御する。
(変形例)
実施の形態において説明した構成は一例であり、機能を阻害しない範囲で構成を変更することができる。例えば、図9に示すステップS120において、制御装置200の領域決定部250は、第1作業装置100の進行方向の変化に基づき、周回方向を決定してもよい。例えば、図2に示すように、第1作業装置100が左回りに作業領域を周回するとき、第1作業装置100の進行方向が左に変化している頻度が高い。このため、領域決定部250は、第1作業装置100の各時刻における進行方向の変化を積算することで、第1作業装置100の周回方向を決定する。ここで、第1作業装置100の進行方向は、例えば測定された時間が連続する2つの位置情報に基づき決定される。
また、図13に示すステップS220において、制御装置200の使用領域選択部270は、候補領域情報に表される作業領域640の精度として、頂点630から第1作業装置100の経路までの距離を表す任意の値を用いてもよく、頂点630から外縁経路610までの距離に限定されない。例えば、使用領域選択部270は、頂点630から登録経路600までの距離により、作業領域640の精度を表してもよい。また、作業領域640の精度は、測定された第1作業装置100の測位位置のうち、頂点630に最も近い測位位置から頂点630までの距離により表されてもよい。また、作業領域640の精度は、第1作業装置100の測位位置に対する外縁経路610上の外縁位置のうち、頂点630に最も近い外縁位置から頂点630までの距離により表されてもよい。ここで、外縁位置は、第1作業装置100の測位位置が測定されたとき、第1作業装置100の外側の端の位置を表す。外縁位置は、例えば周回方向が左周りのとき第1作業装置100の右端の位置を表し、周回方向が右周りのとき第1作業装置100の左端の位置を表す。
また、作業領域640の精度は、複数の頂点630から第1作業装置100の経路までの距離を表す複数の値において、統計的に求められる値、例えば最大値、最小値、平均値、中央値などにより表されてもよい。例えば、使用領域選択部270は、この距離を表す値が大きいほど、作業領域640の精度が低いと判定する。
また、図13に示すステップS210において、制御装置200の使用領域選択部270は、第2作業装置300の位置に基づき、入出力装置210に表示する領域情報の一覧を限定してもよい。例えば、第2作業装置300の第2駆動制御部350は、センサ315により測定された第2作業装置300の位置を表す位置情報を制御装置200に出力する。制御装置200の使用領域選択部270は、第2作業装置300の位置からの距離が閾値より小さい作業領域640に対応する領域情報を抽出し、抽出された領域情報の一覧を出力してもよい。
また、ステップS210において、使用領域選択部270は、作業経路750の決定への適正度を表した領域情報の一覧を出力してもよい。例えば、使用領域選択部270は、適正度が高い順番に領域情報が表示されるように、領域情報の一覧を出力する。また、使用領域選択部270は、領域情報ごとに適正度を算出し、算出された適正度を領域情報に付加した一覧を出力してもよい。
例えば、使用領域選択部270は、作業領域640が登録された登録日からの経過時間が短い領域情報ほど、作業経路750の決定への適正度が高いと判定する。また、使用領域選択部270は、作業経路750の決定に最後に使用された最終使用日からの経過時間が短い領域情報ほど、作業経路750の決定への適正度が高いと判定してもよい。また、使用領域選択部270は、領域情報に表される作業領域640において、頂点630から第1作業装置100の経路までの距離を表す値が小さいほど、作業経路750の決定への適正度が高いと判定してもよい。使用領域選択部270は、複数の指標、例えば登録日からの経過時間、最終使用日からの経過時間、頂点630から第1作業装置100の経路までの距離を表す値などのうち、2つ以上を用いて、適正度を判定してもよい。また、使用領域選択部270は、作業領域640の登録に使用された作業装置の機種を用いて、適正度を判定してもよい。
また、ステップS250から移行したステップS210において、使用領域選択部270は、先に選択された候補領域情報に基づき、入出力装置210に表示する領域情報の一覧を限定してもよい。例えば、使用領域選択部270は、先に選択された候補領域情報に表される作業領域640と一致した作業領域640を表す領域情報を抽出し、抽出された領域情報の一覧を出力してもよい。例えば、使用領域選択部270は、先に選択された候補領域情報に表される作業領域640のうち、閾値以上の割合の領域を含む作業領域640を表す領域情報を抽出する。
また、使用領域選択部270は、先に選択された候補領域情報に表される作業領域640と、領域情報に表される作業領域640とが重なる領域の面積が、それぞれの作業領域640の面積に対する所定の割合より大きい領域情報を抽出してもよい。例えば、使用領域選択部270は、1つの領域情報を選択し、先に選択された候補領域情報に表される第1作業領域と、選択された領域情報に表される第2作業領域とが重なる重複領域の面積を算出する。重複領域の面積が、第1作業領域の面積に対する所定の割合より大きく、かつ、第2作業領域の面積に対する所定の割合より大きいとき、使用領域選択部270は、選択された領域情報を抽出する。
また、使用領域選択部270は、先に選択された候補領域情報に表される作業領域640の形状と類似した作業領域640を表す領域情報を抽出してもよい。例えば、使用領域選択部270は、頂点630の数量と、互いに対応する頂点630の距離とに基づき、先に選択された候補領域情報に表される作業領域640の形状と、領域情報に表される作業領域640の形状との類似度を決定する。使用領域選択部270は、決定された類似度が閾値より大きい領域情報を抽出する。
また、ステップS210において、使用領域選択部270は、第2作業装置300による作業領域の登録を受け付けてもよい。例えば、作業者は、第2作業装置300により作業領域を登録することを表す操作を入出力装置210に入力する。使用領域選択部270は、作業者による操作が入力されると、図13に示す処理を終了し、図9に示す処理を開始する。
以上において説明した実施の形態および変形例は一例であり、各実施の形態および変形例で説明した構成は、機能を阻害しない範囲で、任意に変更してもよく、または/および、任意に組み合わせてもよい。さらに、必要となる機能を実現できれば、実施の形態および変形例で説明した一部の機能を省略してもよい。例えば、図9に示すステップS150において、領域決定部250は、ユーザによる作業領域640の修正操作を受け付けずに、作業領域640を決定してもよい。
例えば、制御装置200の一部の処理を第1作業装置100または第2作業装置300が実行してもよい。また、作業領域管理システム1000は、図15に示すように、制御装置200とネットワーク20を介して接続される領域記憶装置30を備えてもよい。この場合、領域記憶装置30は、制御装置200の一部の処理を実行する。例えば、領域記憶装置30は、図5に示す領域記憶部260と、使用領域選択部270とを実現してもよい。この場合、制御装置200の入出力装置210に表示する情報は、領域記憶装置30から制御装置200に出力されて、制御装置200の入出力装置210に表示される。また、作業領域管理プログラム420は、第1駆動制御プログラム400と第2駆動制御プログラム430とを含んでもよい。
また、作業領域管理システム1000は、領域記憶装置30を備えるとき、複数の制御装置200を備えてもよい。この場合、制御装置200は、領域記憶装置30が作業領域640を格納する作業領域データ410を含むことで、他の制御装置200により登録された作業領域640を用いて作業経路を決定してもよい。
制御装置200は、圃場500で作業を行う複数の作業装置、例えばすべての作業装置を制御してもよい。また、制御装置200は、作業領域管理システム1000に含まれない作業装置を制御してもよい。この場合、作業領域管理システム1000は、作業装置、例えば第1作業装置100と、第2作業装置300とを含まなくてもよい。
また、図16に示すように、作業領域640を登録するために作業者が第1作業装置100を作業領域640の輪郭に沿って移動させるとき、第1作業装置100の位置を精度よく測定するためにRTK(Real Time Kinematic)測位方式を採用して、一時的に固定基準局520が設置されてもよい。RTK測位方式では、固定基準局520が、圃場近傍において予め緯度と経度とが特定された位置に設置される。固定基準局520は、設置された位置(緯度と経度)と、固定基準局520でGNSSの受信機で測定された位置(緯度と経度)との差を補正情報として送信する。第1作業装置100は、測位装置により測定された位置を、固定基準局520から取得する補正情報を用いて補正することで、精度の高い位置を測定する。この場合、制御装置200は、固定基準局520の位置、例えば、固定基準局520を設置した特定の位置を示す緯度、経度を表す基準局情報を作業領域データ410に格納してもよい。例えば、制御装置200の領域記憶部260は、基準局情報を領域情報に含めて作業領域データ410に記憶する。基準局情報は、固定基準局520の位置を表せればよく、各固定基準局520を識別するための情報でもよい。また、固定基準局520が設置される特定の位置は、固定基準局520が設置された状態で固定基準局520により複数回、測定された位置の平均値を表してもよい。
固定基準局520の位置が異なるとき、第2作業装置300において測定される位置の誤差により、第2作業装置300における作業において、第1作業装置100の作業において登録された作業情報を使用できない場合がある。このため、図13に示すステップS210において、基準局情報を含む領域情報が選択されたとき、制御装置200の使用領域選択部270は、固定基準局520が設置されている位置に基づき、選択された領域情報が作業経路の決定に適しているかを判定してもよい。例えば、ステップS220における所定の条件は、第2作業装置300が作業を行うために設置された固定基準局520の位置が候補領域情報に表される固定基準局520の位置と等しいことを含んでもよい。
この場合、使用領域選択部270は、設置されている固定基準局520から設置された位置を表す設置位置情報を取得する。使用領域選択部270は、取得された設置位置情報に表される位置と、領域情報に含まれる基準局情報の位置とが等しいとき、選択された領域情報が作業経路の決定に適していると判定する。例えば、使用領域選択部270は、取得された設置位置情報に表される位置から、領域情報に含まれる基準局情報の位置までの距離が閾値より小さいとき、2つの位置が等しいと判定する。2つの位置が異なると判定されたとき、ステップS230において、使用領域選択部270は、固定基準局520を正しい位置に設置することを促す警告情報を出力してもよい。例えば、使用領域選択部270は、固定基準局520の正しい位置を表す情報を出力してもよい。
また、図9に示すステップS150において、ユーザは、圃場500の出入り口の位置を表す出入り口情報を登録してもよい。例えば、領域決定部250は、決定された作業領域640を地図上に表した画像を表示する。ユーザは、図17に示すように、表示された画像において、出入り口660の位置を指定する操作を入出力装置210に入力する。領域決定部250は、指定された出入り口660の位置を表す出入り口情報を受け付ける。ステップS160において、受け付けた出入り口情報は、領域記憶部260により、領域情報に含められて作業領域データ410に記憶される。
また、図13に示すステップS210において、出入り口情報を含む領域情報が選択されたとき、制御装置200の経路決定部280は、出入り口情報に表される位置を作業経路750の始点または終点に用いてもよい。これにより、作業経路750が容易に決定される。
また、作業領域データ410は、登録されている作業領域640に対応する圃場500の形状が変更されたことを表す変更情報を格納してもよい。例えば、ユーザは、制御装置200の入出力装置210に、作業領域640に対応する圃場500の形状が変更されたことを登録するための操作を入力する。ユーザによる操作が入力されると、制御装置200の領域記憶部260は、形状が変更された圃場500に対応する領域情報を表す変更情報を受け付ける。例えば、領域記憶部260は、作業領域データ410に格納された領域情報の一覧を入出力装置210に表示する。ユーザは、表示された領域情報の一覧から、形状が変更された圃場500に対応する作業領域640を表す領域情報を選択する。領域記憶部260は、選択された領域情報に、対応する圃場500の形状が変更されたことを表す変更情報を付加して作業領域データ410に記憶する。この場合、使用領域選択部270は、図13に示すステップS210において、領域情報の一覧を表示するときに、形状が変更された圃場500に対応する作業領域640を表す領域情報を除いて表示する。また、領域記憶部260は、他のシステムから圃場500の形状が変更されたことを表す変更情報を受け付けてもよい。
また、図9に示すステップS170と、図13に示すステップS260とにおいて、経路決定部280は、決定された1つ以上の作業経路650、750を表す1つ以上の経路情報を記憶してもよい。例えば、経路決定部280は、図18に示すように、経路情報を、記憶装置140に格納された作業経路データ450に記憶してもよい。記憶された作業経路650を表す経路情報は、後に第1作業装置100が圃場500における作業を行うときに利用されてもよい。例えば、作業者は、経路決定部280に記憶され、過去の作業に使用された経路情報の作業経路650に沿って第1作業装置100を移動させ、圃場500における新たな作業を行ってもよい。
この場合、作業者は、制御装置200の入出力装置210に表示された経路情報の一覧から第1作業装置100の作業に使用する経路情報を選択する。経路決定部280は、選択された経路情報を第1作業装置100に出力する。第1作業装置100の第1駆動制御部150は、選択された経路情報に表される作業経路650に沿って、第1作業装置100を移動させる。同様に、記憶された作業経路750を表す経路情報は、後に第2作業装置300が圃場500における作業を行うときに利用されてもよい。
また、経路情報は、その経路情報に表された作業経路650、750が決定されたときに用いられた作業領域640に関連づけて記憶されてもよい。この場合、経路情報は、その経路情報に表された作業経路650、750が決定されたときに用いられた作業領域640に応じて、グループ化される。例えば、作業領域640に対応する圃場500の形状が変更されているとき、制御装置200の経路決定部280は、変更された圃場500に対応する作業領域640に関連づけて表された経路情報が使用されるとき、作業者に警告してもよい。
この場合、領域記憶部260は、作業領域640に対応する圃場500の形状が変更されたことを表す変更情報を受け付ける。領域記憶部260は、受け付けた変更情報に基づき、作業領域データ410に格納された領域情報のうち、対応する領域情報に変更情報を付加する。形状が変更された圃場500に対応する作業領域640に関連づけて表された経路情報を作業者が使用するとき、経路決定部280は、使用する経路情報が適切でないことを表す警告情報を入出力装置210に出力し、作業者に警告する。例えば、経路決定部280は、作業経路データ450に格納された経路情報の一覧を入出力装置210に表示する。作業者は、表示された経路情報の一覧から、第2作業装置300による作業に使用する経路情報を選択する。経路決定部280は、選択された経路情報に表される作業領域640に基づき、作業領域データ410から作業領域640を表す領域情報を取得する。取得された領域情報に、対応する圃場500の形状が変更されていることを表す変更情報が含まれるとき、経路決定部280は、入出力装置210に警告情報を出力する。警告情報は、例えば、選択された経路情報に表された作業経路650、750を決定するときに用いられた圃場500の形状が変更されたことを表す。
また、図1に示すステップS180において、第1作業装置100は、圃場での作業を行うときに、センサ115から取得する稼働情報を制御装置200に出力してもよい。また、図13に示すステップS270において、第2作業装置300は、圃場での作業を行うときに、センサ315から取得する稼働情報を制御装置200に出力してもよい。これらの場合、制御装置200の領域決定部250は、取得された稼働情報を、第1作業装置100または第2作業装置300の作業経路650、750を表す経路情報と関連づけて記憶装置140に記憶してもよい。例えば、稼働情報は、経路情報が作業領域640に関連づけているとき、対応する経路情報が関連づけられている作業領域640に関連づけて記憶されてもよい。また、領域決定部250は、稼働情報を、第1作業装置100または第2作業装置300の作業経路650、750を決定するために用いた作業領域640を表す領域情報と関連づけて記憶装置140に記憶してもよい。この結果、稼働情報は、領域情報に応じて、グループ化される。これにより、同じ作業領域640において行われた作業に関する稼働情報は、グループ化されて記憶装置140に記憶される。同じ作業領域640において行われた作業に関する稼働情報がグループ化されることで、同じ圃場500で行われた作業に関する情報がグループ化される。これにより、作業者は、営農管理を効率的に行うことができる。
(付記)
各実施の形態で記載した作業領域管理方法と、作業領域管理システムと、作業領域管理プログラムとは以下のように言うことができる。
第1の態様に係る作業領域管理方法は、
圃場において第1作業装置が第1作業を行うために移動する第1作業経路を決定する第1作業領域を表し、前記第1作業装置の測位位置に基づき決定された第1領域情報を記憶することと、
前記第1領域情報を、前記圃場において、前記第1作業装置と異なる第2作業装置が第2作業を行うために移動する第2作業経路を決定する領域を表す情報として出力することと、
を含む。
第2の態様に係る作業領域管理方法は、第1の態様に係る作業領域管理方法であって、
前記第1領域情報を出力することは、
前記第1領域情報が所定の条件を満たさないとき、前記第1領域情報が前記第2作業経路の決定に向かないことを表す警告情報を出力すること
を含む。
第3の態様に係る作業領域管理方法は、第2の態様に係る作業領域管理方法であって、
前記第1作業領域は、多角形で形成され、
前記警告情報を出力することは、
前記第1作業領域の頂点から前記第1作業領域の前記測位位置により表される登録経路までの距離に基づき、前記警告情報を出力すること
を含む。
第4の態様に係る作業領域管理方法は、第2または第3の態様に係る作業領域管理方法であって、
前記所定の条件は、
前記第1領域情報が登録された時から所定の時間以上経過していないこと
を含む。
第5の態様に係る作業領域管理方法は、第2から第4の態様のいずれか1つに係る作業領域管理方法であって、
前記所定の条件は、
前記第1領域情報が作業経路の決定に使用された時から所定の時間以上経過していないこと
を含む。
第6の態様に係る作業領域管理方法は、第2から第5の態様のいずれか1つに係る作業領域管理方法であって、
前記所定の条件は、
前記第1作業装置の機種が、作業装置の作業経路の決定に適さない作業装置の機種を表す第1不適切機種群に含まれないこと
を含む。
第7の態様に係る作業領域管理方法は、第2から第6の態様のいずれか1つに係る作業領域管理方法であって、
前記所定の条件は、
前記第1作業装置の機種が、前記第2作業装置の前記第2作業経路の決定に適さない作業装置の機種を表す第2不適切機種群に含まれないこと
を含む。
第8の態様に係る作業領域管理方法は、第1から第7の態様のいずれか1つに係る作業領域管理方法であって、
前記第1領域情報は、前記第1作業装置の位置を測定する精度を向上するために前記第1作業装置により前記第1作業領域を決定するときに設置された固定基準局の位置を表す基準局情報を含み、
前記所定の条件は、
前記第2作業装置が前記第2作業を行うために設置された前記固定基準局の位置が、前記基準局情報に表された前記固定基準局の位置と等しいこと
を含む。
第9の態様に係る作業領域管理方法は、第1から第8の態様のいずれか1つに係る作業領域管理方法であって、
前記第1領域情報を記憶することは、
前記第1領域情報を含む複数の領域情報を記憶すること
を含み、
前記第1領域情報を出力することは、
前記第2作業装置の前記第2作業経路の決定への適正度を表した前記複数の領域情報の一覧を出力することと、
出力された前記複数の領域情報の一覧から、作業者により選択された領域情報を前記第1領域情報として受け付けることと、
を含む。
第10の態様に係る作業領域管理方法は、第1から第9の態様のいずれか1つに係る作業領域管理方法であって、
前記第2作業は、前記第1作業と異なる。
第11の態様に係る作業領域管理方法は、第1から第10の態様のいずれか1つに係る作業領域管理方法であって、
前記第1作業領域内に、前記第1作業装置が前記第1作業を行うために移動する前記第1作業経路を決定することと、
前記第1作業領域内に、前記第2作業装置が前記第2作業を行うために移動する前記第2作業経路を決定することと、
を含む。
第12の態様に係る作業領域管理方法は、第1から第11の態様のいずれか1つに係る作業領域管理方法であって、
前記第1領域情報は、前記圃場の出入り口の位置を表す出入り口情報を含む。
第13の態様に係る作業領域管理方法は、第1から第12の態様のいずれか1つに係る作業領域管理方法であって、
前記第1作業領域に基づき決定された1つ以上の作業経路を、前記第1作業領域に関連づけて表す1つ以上の経路情報を記憶することを含む。
第14の態様に係る作業領域管理方法は、第13の態様に係る作業領域管理方法であって、
前記第1作業領域に対応する前記圃場の形状が変更されたことを表す変更情報を受け付けることと、
前記変更情報に応じて、前記第1作業領域に関連づけて表された前記1つ以上の経路情報に含まれる第1経路情報を使用するときに、前記第1経路情報に表された作業経路を決定するときに用いられた前記圃場の形状が変更されたことを表す警告情報を出力することと、
を含む。
第15の態様に係る作業領域管理方法は、第1から第14の態様のいずれか1つに係る作業領域管理方法であって、
前記第1作業装置が前記第1作業経路に沿って移動したときの状態を表す第1稼働情報を、前記第1領域情報と関連づけて記憶することと、
前記第2作業装置が前記第2作業経路に沿って移動したときの状態を表す第2稼働情報を、前記第1領域情報と関連づけて記憶することと、
を含む。
第16の態様に係る作業領域管理システムは、
圃場において第1作業装置が第1作業を行うために移動する第1作業経路を決定する第1作業領域を表し、前記第1作業装置の測位位置に基づき決定された第1領域情報を記憶する領域記憶部と、
前記第1領域情報を、前記圃場において、前記第1作業装置と異なる第2作業装置が第2作業を行うために移動する第2作業経路を決定する領域を表す情報として出力する使用領域選択部と、
を備える。
第17の態様に係る作業領域管理プログラムは、
圃場において第1作業装置が第1作業を行うために移動する第1作業経路を決定する第1作業領域を表し、前記第1作業装置の測位位置に基づき決定された第1領域情報を記憶することと、
前記第1領域情報を、前記圃場において、前記第1作業装置と異なる第2作業装置が第2作業を行うために移動する第2作業経路を決定する領域を表す情報として出力することと、
を演算装置に実行させる。