JP2022051173A - 運動評価装置および運動評価システム - Google Patents
運動評価装置および運動評価システム Download PDFInfo
- Publication number
- JP2022051173A JP2022051173A JP2020157508A JP2020157508A JP2022051173A JP 2022051173 A JP2022051173 A JP 2022051173A JP 2020157508 A JP2020157508 A JP 2020157508A JP 2020157508 A JP2020157508 A JP 2020157508A JP 2022051173 A JP2022051173 A JP 2022051173A
- Authority
- JP
- Japan
- Prior art keywords
- evaluation
- exercise
- motion
- training
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Physical Education & Sports Medicine (AREA)
- Dentistry (AREA)
- Physiology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Rehabilitation Tools (AREA)
Abstract
【課題】従来、筋力トレーニングの運動効果が一般ユーザにはわかりにくく、トレーニングの継続のモチベーションが維持しにくかった。そこで、本発明では、ユーザ103が行ったトレーニングにおける運動効果を示す情報を、理解しやすい形で作成することを課題とする。【解決手段】上記の課題を解決するために、本発明では、ユーザ103がトレーニング装置104を用いて行うトレーニング動作を撮影装置102で撮影し、このトレーニング動作の画像から関節位置、角度を算出し、これらに基づいて関節の筋張力を推定し、推定された筋張力をデータベースと比較することで、トレーニングの効果を示す評価値を算出し、これを効果としてユーザ103に提示する運動評価装置101を提案する。【選択図】図1
Description
本発明は、人体のトレーニング、つまり、運動における運動効果を評価するための技術に関する。
高齢者の転倒は、骨折を引き起こすことで寝たきりの要因になることが知られており、QoL(Quality of Life)向上のためには転倒を防止することが重要だと考えられている。転倒の要因の一つとしては筋力低下が考えられており、介護施設などでは筋力トレーニングにより筋力を維持、向上する取り組みが行われている。また、運動の重要性は、高齢者に限らないことは言うまでもない。
しかしながら、こうした筋力トレーニングは日常的に少しずつ継続して行うことが重要であり、高齢者のモチベーション維持が課題になっている。モチベーション維持のためには、日々の運動効果を把握できることが重要な要素と考えられる。但し、トレッドミルやフィットネスバイクなどの一般的なトレーニング装置では回転数や走行距離などトレーニング結果が得られるのみで筋肉の活動量を直接把握することは難しい。これを解決する手法として特許文献1や特許文献2に示すように筋肉の動作を解析し筋張力を得る手法が示されている。
特許文献1では、トレーニング動作時の撮影画像から筋張力を推定し、筋肉の状態を撮影画像に重畳表示することが示されている。しかしながら、表示される内容は運動結果であり、運動効果を知るためには専門家が解釈する必要があるため、特に、専門知識を持たない一般ユーザが運動効果を把握することは難しかった。
また、特許文献2では、リハビリ効果を把握するためにリハビリ動作時の撮影画像から可動範囲を推定し、人体構造上可動しうる範囲と比較することが示されている。しかしながら、この手法では人体構造上可動しうる範囲と比較する。このため、本来はトレーニング動作の種類やユーザの性別、年齢によって可動しうる範囲が異なるため比較対象の範囲を変えるべき点について考慮されていなかった。つまり、特許文献2においても運動効果を把握することが困難であった。
以上のように、従来においては、トレーニングの効果(運動効果)を示す情報、わかり易い形で作成することが困難であった。
上記課題を解決するために、本発明では、人体の運動に関する時系列データを用いて、当該運動効果を示す評価値を算出する。より具体的な本発明の一態様は、以下のとおりである。
人体の運動を評価するための運動評価装置において、前記人体の運動の様子を示す運動データを入力する入力部と、前記運動データからの前記人体の関節座標を特定する骨格認識部と、前記関節座標から前記人体の関節角度を算出する関節角度算出部と、前記関節角度に基づいて、前記運動に関する特徴量の時系列データの増減変化の状況を特定し、特定された増減変化の状況に基づいて、前記運動の効果を示す評価値を算出する評価値算出部とを有する運動評価装置である。
また、本発明には、上記の運動評価装置、トレーニングの様子を検出する検出装置およびトレーニングを行うためのトレーニング装置を備える運動評価システムも含まれる。さらに、本発明には、運動評価装置ないし運動評価システムを用いた運動評価方法も含まれる。またさらに、運動評価装置をコンピュータとして機能されるためのプログラムおよび当該プログラムを記憶した記憶媒体も本発明に含まれる。
本発明によれば、運動を行うユーザ自身を含む運動に関する関係者が運動効果を把握することが可能になる。
以下、本発明の各実施例について図面を用いて説明する。なお、各実施例では、ユーザ103、つまり、人体におけるトレーニングの運動効果を評価する。
図1は、実施例1にかかる運動評価システムの構成を示した図である。本運動評価システムは、運動評価装置101、撮影装置102および運動を行うユーザ103が利用するトレーニング装置104で構成される。
トレーニング装置104は、ユーザ103がインタラクティブにトレーニングを行うための装置であり、ユーザ103に動作開始指示を行ってユーザ103の動作の結果を受け取る。つまり、トレーニング装置104は、ユーザ103に対して運動を施すための装置であり、いわゆるトレッドミルを含む。このため、トレーニング装置104は、例えば床上に設置した板状で構成され、自身が内蔵する発光部302を点灯させる。このことで、ユーザ103はその点灯を認識したら足でトレーニング装置104を踏む。そして、トレーニング装置104はユーザ103により、踏まれたことを検知する。
以上のトレーニング装置104による点灯とユーザ103の動作を繰り返すことで、ユーザ103の下半身がトレーニングされる。さらに、トレーニング装置104の床上の設置位置や点灯間隔を変えることで、ユーザ103のトレーニング強度を変えることができる。なお、トレーニング装置104の他の例としては、タッチパネルに表示された物体を足でタッチすることで下半身トレーニングを行うような装置も考えられる。
撮影装置102は、ユーザ103が運動する様子を画像として取得する。このため、撮影装置102は、画像として静止画、動画のいずれを用いることが可能である。なお、本実施例では、静止画として時系列データとして扱える複数の静止画であることが望ましい。
運動評価装置101は、トレーニング装置104や撮影装置102と例えば無線通信する。運動評価装置101は、運動の様子を示す画像データやトレーニング結果を受信する。なお、運動の様子を示す情報には、人体に対するモーションキャプチャデータ、筋電センサで検出される筋電データおよび加速度センサで検出される運動における加速度などを用いてもよい。このように、撮影装置102の代わりに各種検出装置を用いることが可能である。これは、言い換えると、画像データを含む各種検出データを、運動の様子を示す運動データとして利用することになる。なお、これら、各装置の詳細な構成は、図2~4を用いて、以下説明する。
図2は、本実施例にかかる運動評価装置101の構成の一例を示した図である。運動評価装置101は、インターフェース機能として、マウス操作やタッチパネル操作などでユーザからの指示を受け付ける操作入力部202と、ユーザ103などの利用者に画面を提示する表示部203を有する。なお、これらをタッチパネルで構成することで、操作入力部202と表示部203を一体化して実現できる。また、運動評価装置101は、各部を動作制御する制御部201、制御部201で動作制御に係る処理データを一時的に保持するメモリ204と、無線により通信を行う無線通信部205と、USB等で周辺機器と接続する周辺機器接続部206を備える。この周辺機器接続部206は、各種情報の入力を受け付ける入力部として機能する。
また、運動評価装置101は、本装置の機能を実行する骨格認識部207、関節角度算出部208、筋張力推定部209および筋張力評価部210を有する。なお、これら骨格認識部207、関節角度算出部208、筋張力推定部209は、制御部201内に設けてもよい。さらに、運動評価装置101は、各種情報を記憶する記憶部21を有する。
そして、これら各部が共通バス(データバス、アドレスバスを含む)などの通信経路により接続されて構成されている。なお、骨格認識部207、関節角度算出部208、筋張力推定部209および筋張力評価部210は、それぞれプログラムで実現できる。つまり、制御部201はこれらのプログラムに従って本実施例の動作を実現することも可能である。この場合、骨格認識部207、関節角度算出部208、筋張力推定部209および筋張力評価部210のそれぞれは、骨格認識プログラム、関節角度算出プログラム、筋張力推定プログラムおよび筋張力評価プログラムとして実現してもよい。また、これら各プログラムは一体化して実現してもよい。また、各プログラムは、記憶部21に格納され、メモリ204に読み出される。そして、制御部201はメモリ204に読み出されたプログラムに従って後述する処理を実行する。
また、記憶部21には、各部ないしプログラムの入力となるデータや処理結果のデータとして、画像データ211、トレーニング結果212、筋骨格モデル213、筋張力データ214、筋張力データベース215、筋張力評価値216を保持する。
なお、運動評価装置101の処理の詳細は、フローチャートを用いて、後述する。また、運動評価装置101は、いわゆるコンピュータで実現でき、上述の骨格認識部207等をプログラムで実現する場合、当該プログラムは記憶媒体に格納されてもよいし、ネットワーク経由で配信されてもよい。
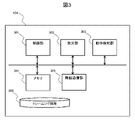
次に、図3は、本実施例にかかるトレーニング装置104の構成の一例を示す図である。トレーニング装置104は、各部を動作制御する制御部301と、制御部で動作制御に係る処理データを一時的に保持するメモリ304とを備える。また、トレーニング装置104は、ユーザ103に動作開始を指示する発光部302と、ユーザ103の動作結果を検知する動作検知部303と、運動評価装置と制御信号やデータを送受信するための無線通信部305を備えている。ここで、発光部302は、例えばLEDで実現できる。
ここで、トレーニング装置104は、動作検知部303の検知結果を用いて、トレーニングごとにユーザ103の踏み込み動作回数や所要時間などをトレーニング結果306として、記憶部に保存する。また、無線通信部305により、トレーニング終了後など所定タイミングに運動評価装置101に送信する。さらに、トレーニング装置104は、無線通信部305として、有線通信を行う機能を有してもよい。もしくは、無線通信部305の代わりに有線の通信部を設けてもよい。
なお、図3は、トレーニング装置104の情報処理に関する部分に着目して記載したものある。このため、トレーニング装置104は、トレーニング用の部位を有したり、接続したりしている。トレーニング用の部位としては、足踏み部分、ベルトコンベアやこれを駆動させる駆動装置が含まれる。
次に、図4は、本実施例にかかる撮影装置102の構成の一例を示す図である。撮影装置102は、各部を動作制御する制御部401と、制御部401で動作制御に係る処理データを一時的に保持するメモリ402と、運動評価装置101と制御信号やデータを送受信するための周辺機器接続部403とを備える。また、撮影装置102は、撮影における主要部として、赤外線を照射する赤外線プロジェクタ404と、赤外線を用いて画像を取得する赤外線カメラ405,406を備えている。ここで、本実施例では、赤外線カメラ405,406を用いるが、他のカメラであってもよい。さらに、カメラの数は問わない。またさらに、カメラの種類は赤外線カメラに限らない。これらについては、後述する他の実施例でも同様である。
なお、本実施例では、周辺機器接続部403を設けているが、これを省略しカメラ単体で構成してもよい。この場合、画像データについては、記憶媒体を介して、運動評価装置101に送ることが可能である。また、運動評価装置101からの制御信号の代わりに、カメラ自身で撮影を制御してもよいし、手動で制御してもよい。なお、本実施例では、画像データとの表現を用いるが、撮影装置102で撮影ないし検出されたデータに基づくものであれば特にその表現は問わない。このため、画像データには、撮影されたデータそのままのデータ、これに対しノイズ低減や圧縮等何らかの変換が施されたデータが含まれる。
次に、図5は、本実施例にかかる各装置間の処理シーケンスを示す図である。以下、図5に従って、各装置の処理内容を説明する。
ステップS501において、運動評価装置101が周辺機器接続部206を介して、撮影装置102に対して撮影開始指示を送信する。撮影装置102は、周辺機器接続部403を介してこれを受信する。
次に、ステップS502において、撮影装置102は、撮影開始指示に応じて、予め定められたトレーニング領域の撮影を開始する。つまり、制御部401の制御に従って、赤外線プロジェクタ404が赤外線を照射し、赤外線カメラ405,406が撮影を開始し、画像データを取得する。
また、ステップS503において、運動評価装置101が無線通信部205を介して、トレーニング装置104に対してトレーニング開始指示を送信する。そして、トレーニング装置104は、無線通信部305を介して、トレーニング開始指示を受信する。なお、ステップS501とステップS503は並行して実施するなどその順序は入れ替え可能であるが、ステップS503がステップS504より先行することが望ましい。これは、トレーニングの様子を漏れなく撮影するためである。
次に、ステップS504において、トレーニング装置104は、トレーニング開始指示に応じた所定のトレーニングメニューを開始する。このトレーニング実施中のトレーニング装置104の動作の詳細は後述する。また、ステップS505において、トレーニング装置104の制御部301は、上記トレーニングが終了したことを検出する。
そして、ステップS506において、トレーニング装置104は無線通信部305を介して、
運動評価装置101に対してトレーニング終了通知およびユーザ103の運動結果をまとめたトレーニングデータを送信する。この送信は、それぞれのデータを別タイミングでも同じタイミングで行ってもよい。そして、運動評価装置101の無線通信部205は、トレーニング終了通知およびトレーニングデータを受信する。
運動評価装置101に対してトレーニング終了通知およびユーザ103の運動結果をまとめたトレーニングデータを送信する。この送信は、それぞれのデータを別タイミングでも同じタイミングで行ってもよい。そして、運動評価装置101の無線通信部205は、トレーニング終了通知およびトレーニングデータを受信する。
次に、ステップ507において、運動評価装置101の無線通信部205は、撮影装置102に対して、撮影終了指示を送信する。そして、撮影装置102の周辺機器接続部403は、撮影終了指示を受信する。
次に、撮影装置102は、制御部301の制御に従って、受信した撮影終了指示に応じて、撮影を終了する。つまり、赤外線プロジェクタ404の赤外線照射および赤外線カメラ405,406の撮影を終了する。
また、ステップS509において、撮影装置102は周辺機器接続部403を介して、運動評価装置101に対して撮影が終了したことを通知する。また、撮影装置102は周辺機器接続部403を介して、運動評価装置101に対して、赤外線カメラ405,406が撮影した画像データを送信する。なお、本実施例では、周辺機器接続部403を介して画像データを送信しているが、記憶媒体を介して、運動評価装置101が画像データを取得してもよい。また、撮影が終了したことは、利用者から操作入力部202を介して受け付けてもよい。
ここで、本実施例の撮影装置102では、撮影した画像データの一例として深度情報を生成するものとする。なお、深度情報を生成する方法は一般的に知られており、例えば2台のカメラで撮影した2つの画像から対応する物体をそれぞれ検出し、その視差から三角測量の要領で深度を算出する方法が存在する(特開2020-53950号公報参照)。ここでは、三角測量の要領で深度情報を生成する例を示したが、ToF(Time of Flight)方式のように赤外線を照射して反射光を受光し、その遅延時間から深度を算出する方法を用いても良い。
次に、ステップS510において、運動評価装置101の骨格認識部207が、ステップS509で送信された画像データからユーザ103の骨格を認識する。画像データから骨格を認識する方法は一般的に知られており、例えばToF方式で得た深度情報を人体モデルに当てはめて特徴点の三次元座標を得る技術が開示されている(国際公開12/528398号)。また、骨格の認識は、近年発展している深層学習を用い大量の画像から特徴点を識別するモデルを構築する手法もある。これら骨格認識技術により、所定単位の画像データの所定単位ごとに、ユーザ103の関節や任意の部位の三次元座標を得ることができる。ここで、所定単位としては、動画データにおけるフレームごとのデータや複数の静止画の場合における所定数の静止画データが含まれる。
そして、運動評価装置101の関節角度算出部208が、三次元座標を用いて、ユーザ103の関節の角度を算出する。
次に、ステップS511において、運動評価装置101の筋張力推定部209は、得られた骨格座標ないし関節の角度を用いて筋張力を推定する。そして、ステップS512において、運動評価装置101の筋張力評価部210は、推定された筋張力を用いて、ユーザ103のトレーニングの効果、つまり、運動の効果を評価する。筋張力評価部210の評価については、後述するが、筋張力評価部210は、運動の効果を示すスコア、つまり、評価値を算出する。つまり、本実施例では、筋張力評価部210は、評価値算出部として機能する。また、運動評価装置101は、制御部201の制御に従って、算出された評価値を表示部203に表示する。
図6は、本実施例にかかるトレーニング装置104の処理フローを示すフローチャートである。本実施例のトレーニング装置104は、ユーザ103に足踏みトレーニングを実施させる装置である。このため、トレーニング装置104は、踏み出しのタイミングを発光部302の点灯によってユーザ103に通知する。足踏みは、トレーニング装置104に内蔵された動作検知部303で検出するが、検出方式は圧力センサやタッチパネルなどを用いればよい。本実施例では足踏みの例で説明するが、ユーザ103をインタラクティブに動作させ、トレーニング効果が得られる方法であれば手によるタッチ、トレッドミルなど別の動作を行うものでも構わない。以下、トレーニング装置104の処理をステップごとに説明するが、これは、図5におけるステップS504-S505の処理に該当する。
ステップS601において、制御部301は、ユーザ103への動作開始を指示するために発光部302(LED)を点灯させる。この処理は、ステップS503で受信したトレーニング開始指示に応じて、実行する。この発行は、単純なLED発光で実現できるが、トレーニング装置104が内蔵もしくは接続する以下の構成を用いることが可能である。例えば、ディスプレイに表示した画像やテキスト、スピーカから出力する音声などである。このように、ユーザ103に指示を与えられる方法であればこれらに限定するものではない。
次に、ステップS602において、制御部301は、発光部302の点灯に応じてトレーニングを行っているユーザ103からトレーニングの終了ないし停止の指示を受け付けたかを判断する。この指示は、図示しないタッチパネルのような入力部から受け付ける。この結果、指示を受け付けた場合は、ステップS603に進む。指示を受け付けない場合、ステップS605に進む。
次に、ステップS603において、制御部301は、発光部302を消灯する。このことで、ユーザ103はトレーニングを一旦終了することになる。つまり、複数回で1セットとするトレーニングの1回分を終了することになる。この際、制御部301は、トレーニング結果306に含まれる該当のトレーニング回数を+1する。
次に、ステップS604において、制御部301は、トレーニング結果306を用いて、該当のトレーニングが、トレーニング装置104に記憶された所定の回数を実行されたかを判定する。所定の回数を実行されていないと判定した場合、ステップS601に戻り、制御部301は再度、発光部302を点灯する。
また、所定の回数を実行されたと判定した場合、トレーニングを終了する。この際、制御部301は、ステップS602における発光色やタイミングを変えて発光部302を点灯したり、音声などでトレーニングが終了したことを出力したりすることが望ましい。
また、ステップS605において、制御部301は、ステップS601の点灯から予めトレーニング装置104に記憶された一定時間が経過したかを判定する。この結果、一定時間が経過したと判定した場合、ステップS603に進む。また、一定時間を経過していないと判定した場合、ステップS602に戻る。なお、このステップS605は省略してもよい。この場合、ステップS602で操作を受け付けていない、と判定した場合、ステップS602の処理を繰り返す。なお、動作に時間がかかるユーザもいるため、上述の一定時間は十分長い時間とすることが望ましい。
以上のように、本実施例では、トレーニングを所定の回数繰り返す例で説明したが、ユーザのトレーニングにおける運動結果や運動効果に応じて、制御部301は動的にその回数を切り替えてもよい。なお、運動結果としては、足踏み回数が例示される。さらに、ステップS602やステップS605の判定において、予め記憶された運動結果(足踏み回数)や運動効果を用いて判定してもよい。
以上により、トレーニングが終了すると、制御部301はトレーニング結果306にこの結果を格納する。そして、制御部301は無線通信部305を用いて、トレーニングの終了通知およびトレーニング結果306のうち該当するトレーニングデータを、運動評価装置101に送信する。つまり、ステップS506が実行される。以上で、トレーニング装置104の処理の説明を終了し、以下、運動評価装置101の処理について、説明する。
図7は、本実施例における運動評価装置101が筋張力を評価する処理フローを示すフローチャートである。つまり、図5のステップS511の詳細を示す。このため、図7に示す処理を実行するまでに、運動評価装置101は、トレーニングデータや画像データを受信している。また、本実施例において、評価をするとは、運動効果を示すスコアである評価値を算出することを示す。
まず、ステップS701において、骨格認識部207は、ステップS510で認識された骨格座標を1フレーム分取得する。ここで取得される骨格座標には、ユーザの膝や足首など特徴点の三次元座標が含まれている。なお、本実施例では画像データとして、動画を用いるため、フレーム単位としたが、他の単位分を扱ってもよい。
次に、ステップS702において、関節角度算出部208は、取得された1フレーム骨格座標から各関節の角度を算出する。骨格座標から関節角度を算出する手法は一般的に知られている。例えばモーションキャプチャで得られた実マーカの三次元座標を筋骨格モデル上の仮想マーカと照合し、姿勢を特定した上で関節角度を求める手法がある。この例として、福田らにより提案された、モーションキャプチャデータを用いた人体骨格モデルの運動学パラメータ推定方法がある。ここに示された手法では、以下の(数1)式で表される実マーカと仮想マーカの距離誤差Zを最小化することで、姿勢を特定している。
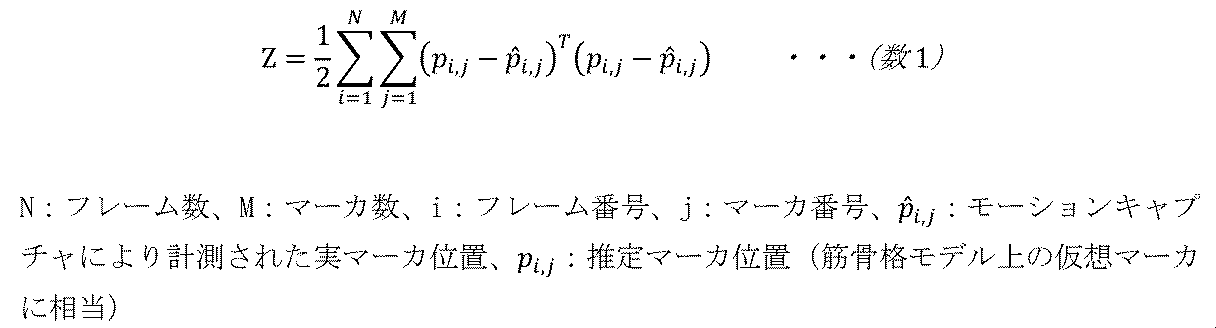
本実施例では1フレームごとに関節角度を算出する例を説明するが、公知技術で述べられているように複数フレームにわたって誤差を最小化することで特定した姿勢が滑らかに推移する効果が得られる。
次に、ステップS703において、筋張力推定部209が、ステップS702で得られた関節角度を実現する筋張力を推定する。筋張力を推定する手法は一般的に知られており、例えば剛体リンク系の逆動力学による関節トルクの計算、ワイヤ長さの関節値に対するヤコビアンの計算、関節トルクのワイヤ張力への変換により筋張力を推定する手法がある(特許文献1)。具体的には、下記(数2)により関節トルク、つまり、筋張力を算出できる。

なお、(数2)で用いられるヤコビアンJは、以下の(数3)で算出される。

次に、ステップS704において、筋張力推定部209は、筋張力の推定(S7092)が全フレーム分終了したかを判定する。この結果、終了していないと判定した場合は、ステップS701に戻って、次のフレームについての処理を実行する。終了していると判定した場合は、ステップS705に進む。なお、本実施例では、全フレームを処理した場合、ステップS705以降の処理を行うとしているが、予め定めた一定数のフレームを処理した場合、ステップS705以降とステップS701以降の処理を並行して実施してもよい。
次に、ステップS705において、筋張力評価部210が、ステップS701からS704で得られたトレーニングの各期間(各フレーム分)の筋張力を時系列データとして取得する。そして、筋張力評価部210は、その時系列データにおける増減変化に関わる情報を特徴量として抽出する。特徴量の種類(指標)として、トレーニングに伴って発揮される筋張力のピーク値やピーク到達時間を用いることができる。特徴量を算出する対象の部位は大腿直近や腓腹筋など特定の筋でもよいし、脚部に属する複数の筋の筋張力を総合的に判断し、各筋のピーク値の合計などを特徴量としてもかまわない。
次に、ステップS706において、筋張力評価部210は、ステップS705で得られた特徴量に基づいて、筋張力の評価値を算出する。このために、筋張力評価部210は、図8に示す筋張力データベース215を用いる。この筋張力データベース215は、予めユーザとなり得る複数人の筋張力データを取得し、特徴量の最大値および最小値を調べておき、筋張力データベース215として保存する。筋張力データベース215は、図8に示すように、性別、年齢、身長、体重といった属性ごとに、特徴量の種類とその最小値および最大値が記録されている。
この筋張力データベース215は、運動評価装置101の利用者が手作業で入力して作成もよいし、運動評価装置101が自動で作成してもよい。さらに、後述する処理で利用されたレコードを読み出しやすいように、筋張力評価部210は、利用した場合より上位にソートして記録してもよい。
そして、筋張力評価部210は、筋張力データベース215に保存された特徴量の分布と今回得られた特徴量の値を比較して評価値を算出する。具体的な評価値の決定方法は、例えば最小値と最大値の間を100等分し、評価対象の特徴量がどこに位置するかで0点から100点でスコア化して、評価値を算出する。ここで、性別、年齢、身長、体重などの属性によって筋張力の特徴量の範囲が異なる。このため、筋張力データベース215ではその組み合わせごとに異なる最小値、最大値を保存することが望ましい。
また、トレーニング動作ごとに筋張力の特徴量の範囲が異なるため、筋張力データベース215はトレーニング動作の種類ごとに異なる最小値、最大値を保存することが望ましい。さらに、繰り返し運動によってピーク値が複数得られる場合は、ピーク値の平均を評価値算出に用いればよい。また、平均のほかに中央値や分散などほかの統計量などの代表値を用いても構わない。
以上では、筋張力評価部210は、評価値を特徴量の種類ごとに算出している。但し、筋張力評価部210は、複数の特徴量をまとめた総合的な評価値を算出してもよい。この場合、筋張力評価部210は、複数の特徴量それぞれの評価値を算出し、これらを用いて総合的な評価値を算出することになる。この総合的な評価値には、各評価値の合算、平均などの代表値が含まれる。
以上のように評価値の算出がなされると、制御部301は、表示部203を用いて、評価処理の結果を出力する。以下、その内容を説明する。
図9に、本実施例にかかる運動評価装置101が筋張力評価結果をユーザ103に提示する画面の一例を示す。この画面は、制御部301の制御に従って表示部203に表示される内容であり、以下の項目を有する。入力欄902にはデータ管理に必要なユーザID、氏名、筋張力評価において異なる筋張力データベースを参照するための性別、年齢、身長、体重を入力するようになっている。つまり、この入力に応じて、筋張力評価部210は、ステップS706の評価値の算出を行う。具体的には、筋張力評価部210が、入力された属性および該当する特徴量の種類をキーに筋張力データベース215を検索する。この結果、検索されたレコードの最小値と最大値を用いて、上述する評価値算出を筋張力評価部210が行う。
また、画面中央には特徴量の抽出対象とした大腿直筋の筋張力の時間変化がグラフで表示される(903)。ユーザ103はこのグラフを見ることで、繰り返し運動に伴って筋張力が変動していることを俯瞰的に把握することができる。また、グラフの下には筋張力のピーク値の最小値、最大値、平均値が表示され、筋張力ピーク値の評価結果が評価値として(73点)表示される(904)。これにより、ユーザは運動効果を定量的かつ直感的に把握することができる。
また、図10は、別の表示方法として筋張力のピーク到達時間を評価した結果を提示する例を示す。本画面も、制御部301の制御に従って表示部203に表示される内容である。画面中央には図9と同様に大腿直筋の筋張力の時間変化がグラフとして表示され、その下にはピーク到達時間の最小値、最大値、平均値とその評価結果である評価値が表示(47点)されている(1003)。この筋張力のピーク到達時間を定量的に見ることで、ユーザ103はトレーニングの際に自身の筋がどれだけ迅速に筋張力を発揮できているかを把握することができる。
さらに、図11は、別の表示方法として筋張力の評価結果を前回トレーニングと比較して提示する例を示す。本画面も、制御部301の制御に従って表示部203に表示される内容である。画面中央には大腿直筋の筋張力の時間変化が前回分とともにグラフ表示される(1103)。ユーザはこのグラフを見ることで、筋張力の変化が前回と今回でどのように異なるか視覚的に理解することができる。
また、グラフの下には筋張力のピーク値の最小値、最大値、平均値、評価結果を示す評価値がそれぞれ前回との比較で表示される。これを見ることで、ユーザ103は運動効果を前回と比較して理解することができる。また、前回との比較にもとづき、次回トレーニングでのアドバイス、おすすめのトレーニング方法1105などを提示すれば、さらにユーザのトレーニングを支援することができる。
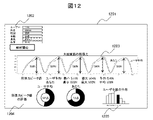
まさらに、図12は、さらに別の表示方法として筋張力の評価結果を他のユーザと比較して提示する例を示す。本画面も、制御部301の制御に従って表示部203に表示される内容である。画面中央には大腿直筋の筋張力の時間変化が他のユーザとの比較でグラフ表示される(1203)。ここで比較対象とするユーザとしては、例えば評価値が平均的なユーザを選択することが挙げられる。また、比較対象のユーザとして最高値を出したユーザを選択すれば、ユーザに対してさらなる努力を促すことができ、モチベーション向上につながると考えられる。また、画面右下のようにユーザ全体の評価値の分布(スコア分布)と、当該ユーザ103がそのスコア分布でどこに位置するかをヒストグラム1205で表示してもよい。
なお、本実施例の評価値の表示を、特徴量の種類ごとに行っているが、総合的な評価点にまとめて表示してもよい。さらに、制御部201に従って表示部203に、複数の特徴量に関する評価値をレーダーチャートのようにまとめて表示してもよい。この一例を図20に示す。
また本実施例では関節角度を算出するために骨格座標を用いたが、反射マーカを人体に貼り付けて複数カメラでその位置を認識する手法や、加速度など慣性センサを用いて動作を推定する手法など、ほかのモーションキャプチャ方式を使っても構わない。以上で、実施例1の説明を終了する。
実施例1では、筋張力の時間変化から特徴量を算出して全体分布と比較することで、筋張力評価部210が評価値を算出する例を示した。しかし、筋張力の他、筋疲労など別のセンサの計測値を用いて、評価値を算出することも可能である。この例を、実施例2として、以下説明する。
ここで、筋疲労については、例えば筋電図を用いて計測する手法が知られているが、筋電図は電極の装着が煩雑であったり、貼り付け部位の決定に専門知識を要するなど一般ユーザが手軽に計測することは困難である。そこで、本実施例では筋電図から得られる筋疲労と筋張力の関係をあらかじめモデル化しておき、トレーニング時には筋張力のみから筋疲労を推定する例について説明する。
図13は、筋張力と筋疲労の関係をモデル化する際の計測システムを示した図である。実施例1で示したシステム構成に加えて、筋電センサ1301が追加されている。筋電センサ1301はユーザの大腿部などの皮膚に直接貼付され、トレーニング中の表面筋電図を取得する。取得された筋電データは運動評価装置101に送信され、筋疲労の評価が行われる。筋電図を用いた筋疲労計測手法は一般的に知られており、例えば筋疲労が発生すると筋電図の低周波成分が増加することを利用して筋疲労を検知する手法が示されている(例えば、特開2000-232号公報に記載)。
図14は、本実施例にかかる運動評価装置101の構成を示している。なお、実施例1で説明した運動評価装置と同じ構成要素については同じ番号を付与してある。本実施例にかかる運動評価装置では新たに筋疲労推定モデル1401と、筋疲労予測値1402と、筋疲労予測部1403を備える。なお、筋疲労予測部1403は、制御部201内に設けてもよい。さらに、筋疲労予測部1403については、筋疲労予測プログラムとして、実現してもよい。これは、記憶部21に格納され、メモリ204に展開される。そして、制御部201がメモリ204に展開された筋疲労予測プログラムに従ってその機能を実行する。なお、筋疲労予測部1403も、評価値算出部として機能する。
筋疲労推定モデル1401は、トレーニング中の筋張力変化から算出される特徴量と筋疲労評価値の関係を示すモデルであり、あらかじめ取得した特徴量と筋疲労評価値のデータセットを用いて構築される。このために、同一のトレーニングを異なるユーザに実施させたときの筋張力データを収集し、ピーク値やピーク到達時間など増減変化に関わる情報を抽出し特徴量とする。ここで、収集するデータは、予め定められた容量以上を収集することが望ましい。このデータは、運動評価装置101が実行することが望ましい。
ここで、筋疲労評価値は、例えば運動後にVAS(Visual Analogue Scale)などの主観評価結果であり、筋張力データを取得したときに対応する評価値を併せて取得しておく。モデル構築手法としては、サポートベクターマシンやニューラルネットワークに代表される機械学習アルゴリズムを用いればよい。筋張力データの特徴量と筋疲労評価値の関係は性別、年齢、身長、体重によって異なるため、その組み合わせごとに異なる筋疲労推定モデルを構築することが望ましい。トレーニングを実施し、筋疲労予測値を得たいときには、図1に示すシステムを用いて筋張力データを生成する。以上の情報は、筋疲労予測部1403が実行する。また、制御部201の制御に従って、表示部203が、構築した筋疲労推定モデルを用いた筋疲労の予測結果をユーザ103に提示する。
また、本実施例の応用例としては、高齢者の転倒リスク評価値の予測に用いることが考えられる。転倒リスク要因の一つとしては筋力低下が知られているが、転倒リスク評価はTUG(Time Up & Go Test)測定など専門家によるアセスメントを要するため、一般ユーザが手軽に評価することは難しい。あらかじめ専門家が評価した転倒リスク評価値を取得しておき、トレーニング時の筋張力変化の特徴量とこの転倒リスク評価値の関係をモデル化すれば、筋張力のみから容易に転倒リスクを評価することができる。
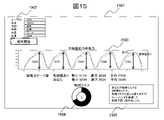
図15は、推定した転倒リスク評価値をユーザに提示する画面の一例である。この画面も実施例1と同様に、制御部201の制御に従って、表示部203が表示する。図15に示すように、例えば転倒リスクが高いほうを5とし、5段階評価で数値を表示すればよい(1504)。また、図15中の画面右下に示すように転倒リスクをもとにしたアドバイス1505を表示してもよい。
実施例1では筋張力データの増減変化に関わる情報のみを特徴量として筋張力評価値を得る例を示したが、運動評価装置101がトレーニング装置104のデータを組み合わせてさらに詳細な解析に基づく評価を行ってもよい。トレーニング装置104のデータとして、トレーニング結果212の内部構成の一例を図16に示す。トレーニング結果212には、トレーニング装置104の点灯時刻とユーザ操作を検知した時刻が格納されている。それぞれの時刻はミリ秒単位で表現され、ユーザ103のトレーニングである動作を細かく計測することが可能である。
図17には、トレーニング装置104の点灯時刻1701およびユーザ操作検知時刻1703と筋張力変化の関係を示している。本実施例にかかるトレーニング装置104では、発光部が点灯したことをユーザが知覚してから動作を開始し、トレーニング装置104での操作が検知される流れになる。このうち点灯時刻1701から筋張力が発生し始める時刻1702まではユーザ103が点灯を知覚するまでの遅延時間を表しており、時刻1702からユーザ操作検知時刻1703まではユーザの動作が完了するまでの遅延時間を表している。つまり知覚遅延時間1704と動作遅延時間1705は身体の異なる機能を評価した計測値だと言うことができる。繰り返し動作において知覚遅延時間と動作遅延時間がそれぞれどのように変化するかを、平均や分散等で数値化し特徴量とする。この処理は、筋張力推定部209で実行される。
その他の処理については、実施例1で示した手順と同様に、筋張力評価部210が、あらかじめ生成した筋張力データベースと比較して当該トレーニングの知覚遅延時間および動作遅延時間をスコア化、つまり、評価値を算出する。そして、制御部301の制御により図示しない表示画面にこれを表示することで、ユーザ103に提示する。
実施例1では、筋張力データベース215をあらかじめ保存しておく例を示したが、筋張力データベース215は、随時更新されてもよい。この例を実施例4として、説明する。
この例では、最小値や最大値が変更される。このため、上述のステップS705およびS706については、変更された最小値や最大値が用いられることになる。ここで、ユーザ103が継続的にトレーニングを行うと、トレーニングの間で最小値や最大値が変更されることもあり得る。
このような場合に、筋張力評価部210が変更後の最小値や最大値を用いると、評価値の継続性に問題が生じることがある。つまり、同じ特徴量でも最小値や最大値が変わることで、評価値が変わってしまうことがある。このようなことに対応するために、本実施例では、筋張力データベース215の更新に合わせて、ステップS706で算出される評価値を、筋張力評価部210が補正することが望ましい。この補正は、最小値および最大値の変更前後の差分に応じた補正係数を、筋張力評価部210が算出することで実現できる。
実施例4は、実施例1~3で示す構成でも実現できるが、より好適なシステム構成を図18に示す。図18は、本実施例にかかるシステム構成図である。運動評価装置101はネットワークを経由してサーバ1801と接続され、筋張力データの送信および筋張力データベース215に格納するデータの受信を行う。図18にはサーバ1801にひとつの運動評価装置101が接続される形態を示したが、様々な場所に設置された複数の運動評価装置101が接続されてもよい。また、サーバ1801と運動評価装置101を接続するネットワークの形式は問わない。
次に、図19は、本実施例にかかる運動評価装置101がサーバ1801との通信により筋張力データベースを更新するフローを示すフローチャートである。
ステップS1901において、運動評価装置101無線通信部205ないし周辺機器接続部206が制御部301に従って、蓄積された一定期間分の筋張力データ214をサーバ1801に送信する。送信頻度は1日ごとや1週間ごとなど筋張力データの蓄積ペースに合わせて適切に設定する。このタイミングは周期的であってもよいし、筋張力データ214の更新ないし変更があった場合としてもよい。また、送信タイミングは深夜など運動評価装置101の使用の妨げにならない時間帯が望ましい。
次に、ステップS1902において、サーバ1801が運動評価装置101から送信された筋張力データ214に基づいて、筋張力データベース215を再計算する。具体的には、送信された筋張力データ214から所定の特徴量を算出し、特徴量ごとの最小値、最大値を再計算する。複数の運動評価装置101から筋張力データ214を受信する場合は、サーバ1801は、それらをまとめて最小値、最大値を再計算する。なお、サーバ1801は、いわゆるコンピュータで実現され、この処理をCPUのような処理部が、プログラムに従って実行する。以下の処理でも処理の主体は同様である。
次に、ステップS1903において、サーバ1801が再計算した筋張力データベース215を運動評価装置101に配信する。この配信タイミングは1日の利用開始に間に合うように早朝などに行うことが望ましい。また、サーバ1801のタイミングで配信するのではなく、運動評価装置101からの要求に基づいて配信しても構わない。
そして、ステップS1904において、運動評価装置101の無線通信部205ないし周辺機器接続部206は、配信された筋張力データベース215を受信する。そして、制御部201が、記憶部21にこれを格納することで、筋張力データベース215を更新する。
なお、ステップS1901において、送信されるデータそのものを送信するとデータ容量が膨大になる場合は、あらかじめ運動評価装置101で特徴量を抽出しておく。そして、その特徴量のみをサーバ1801に送信するようにすればデータ容量を低減することができる。また、ステップS1903において、変更されたデータに限定した送信や圧縮して送信することで、データの送信量を削減できる。このことは、ステップS1901でも同様である。
以上で、本発明の各実施例の説明を終了するが、これら実施例の機能を組み合わせることも可能である。また、本発明の各実施例によれば、ユーザなどが運動効果を把握することが可能になる。このため、ユーザのモチベーションの向上ないし維持を図ることも可能になる。
101 運動評価装置、102 撮影装置、103 ユーザ、104 トレーニング装置、201 制御部、202 操作入力部、203 表示部、204 メモリ、205 無線通信部、206 周辺機器接続部、207 骨格認識部、208 関節角度算出部、209筋張力推定部、210 筋張力評価部、21 記憶部
Claims (10)
- 人体の運動を評価するための運動評価装置において、
前記人体の運動の様子を示す運動データを入力する入力部と、
前記運動データからの前記人体の関節座標を特定する骨格認識部と、
前記関節座標から前記人体の関節角度を算出する関節角度算出部と、
前記関節角度に基づいて、前記運動に関する特徴量の時系列データの増減変化の状況を特定し、特定された増減変化の状況に基づいて、前記運動の効果を示す評価値を算出する評価値算出部とを有する運動評価装置。 - 請求項1に記載の運動評価装置と、
前記人体に対し、前記運動を施すためのトレーニング装置と、
前記人体の運動の様子を検出し、前記運動評価装置に対して、前記運動データを送信する検出装置とを備える運動評価システム。 - 請求項2に記載の運動評価システムにおいて、
前記運動評価装置は、予め属性ごとに記憶されている前記特徴量における最大値および最小値と、前記特徴量の代表値の関係に基づいて、前記評価値を算出する運動評価システム。 - 請求項3に記載の運動評価システムにおいて、
前記運動評価装置は、前記最大値および前記最小値を記憶するデータベースサーバとネットワークを介して接続され、
前記運動評価装置は、前記データベースサーバへ前記最大値および前記最小値に変化が生じた場合、当該変化に関する情報を限定的に送信する運動評価システム。 - 請求項1に記載の運動評価装置において、
さらに、前記特徴量として、前記運動における前記人体の筋張力を推定する筋張力算出部有する運動評価装置。 - 請求項1に記載の運動評価装置において、
前記評価値算出部は、予め属性ごとに記憶されている前記特徴量における最大値および最小値と、前記特徴量の代表値の関係に基づいて、前記評価値を算出する運動評価装置。 - 請求項6に記載の運動評価装置において、
前記代表値は、前記特徴量の時系列データにおける平均値である運動評価装置。 - 請求項6に記載の運動評価装置において、
前記評価値算出部は、前記最大値および前記最小値の変化に応じて、前記評価値を補正する運動評価装置。 - 請求項6に記載の運動評価装置において、
前記評価値算出部は、前記評価値を予め定められる前記特徴量の種類ごとの評価値もしくは複数の前記特徴量の種類を総合した評価値を算出する運動評価装置。 - 請求項1に記載の運動評価装置において、
前記運動データは、撮影装置で撮影される前記人体の画像データ、前記人体に対するモーションキャプチャデータ、筋電センサで検出される前記人体の筋電データおよび加速度センサで検出される前記人体の運動における加速度の少なくとも1つを含む運動評価装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020157508A JP2022051173A (ja) | 2020-09-18 | 2020-09-18 | 運動評価装置および運動評価システム |
| PCT/JP2021/007906 WO2022059228A1 (ja) | 2020-09-18 | 2021-03-02 | 運動評価装置および運動評価システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020157508A JP2022051173A (ja) | 2020-09-18 | 2020-09-18 | 運動評価装置および運動評価システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022051173A true JP2022051173A (ja) | 2022-03-31 |
Family
ID=80777423
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020157508A Pending JP2022051173A (ja) | 2020-09-18 | 2020-09-18 | 運動評価装置および運動評価システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2022051173A (ja) |
| WO (1) | WO2022059228A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI824882B (zh) * | 2022-09-02 | 2023-12-01 | 宏達國際電子股份有限公司 | 姿勢矯正系統及方法 |
| EP4324391A1 (en) | 2022-08-15 | 2024-02-21 | ASICS Corporation | Gait evaluation system and gait evaluation method |
| WO2024057767A1 (ja) * | 2022-09-14 | 2024-03-21 | カシオ計算機株式会社 | 運動評価方法、情報処理装置、運動評価システム及びプログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3120065B2 (ja) * | 1998-05-27 | 2000-12-25 | 科学技術振興事業団 | フィードフォワード運動訓練装置およびフィードフォワード運動評価システム |
| KR101580065B1 (ko) * | 2012-04-11 | 2015-12-24 | 시스템 인스트루먼츠 컴퍼니 리미티드 | 트레이닝 장치 |
| JP2016035651A (ja) * | 2014-08-01 | 2016-03-17 | 株式会社日立ソリューションズ | 在宅リハビリテーションシステム |
| US20200001159A1 (en) * | 2017-03-28 | 2020-01-02 | Sony Corporation | Information processing apparatus, information processing method, and program |
| JP6535778B1 (ja) * | 2018-03-07 | 2019-06-26 | 社会福祉法人兵庫県社会福祉事業団 | 運動能力評価システム |
| JP7008342B2 (ja) * | 2019-03-05 | 2022-01-25 | 株式会社Sportip | 運動評価システム |
-
2020
- 2020-09-18 JP JP2020157508A patent/JP2022051173A/ja active Pending
-
2021
- 2021-03-02 WO PCT/JP2021/007906 patent/WO2022059228A1/ja active Application Filing
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4324391A1 (en) | 2022-08-15 | 2024-02-21 | ASICS Corporation | Gait evaluation system and gait evaluation method |
| TWI824882B (zh) * | 2022-09-02 | 2023-12-01 | 宏達國際電子股份有限公司 | 姿勢矯正系統及方法 |
| WO2024057767A1 (ja) * | 2022-09-14 | 2024-03-21 | カシオ計算機株式会社 | 運動評価方法、情報処理装置、運動評価システム及びプログラム |
| JP7559811B2 (ja) | 2022-09-14 | 2024-10-02 | カシオ計算機株式会社 | 運動評価方法、情報処理装置、運動評価システム及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022059228A1 (ja) | 2022-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2022059228A1 (ja) | 運動評価装置および運動評価システム | |
| US9374522B2 (en) | Video generating apparatus and method | |
| Eltoukhy et al. | Prediction of ground reaction forces for Parkinson's disease patients using a kinect-driven musculoskeletal gait analysis model | |
| US20160073614A1 (en) | System and Method for Detection of Lameness in Sport Horses and other Quadrupeds | |
| KR102245338B1 (ko) | 웨어러블 기반 셀프형 운동관리 시스템 및 그 방법 | |
| JPWO2013129606A1 (ja) | ランニングフォーム診断システムおよびランニングフォームを得点化する方法 | |
| CN111937078A (zh) | 身体功能自主辅助装置及其方法 | |
| WO2016200564A1 (en) | System and method for detection of lameness in sport horses and other quadrupeds | |
| JP6509406B1 (ja) | 歩行態様表示方法、歩行態様表示システム及び歩行態様分析装置 | |
| CN104412269A (zh) | 使用交互场景系统进行神经运动康复的方法和装置 | |
| JP2021051400A (ja) | リハビリ支援装置、リハビリ支援システム及びリハビリ支援方法 | |
| KR20190097361A (ko) | 자세 교정을 위한 자세 평가 시스템 및 그 방법 | |
| JP2021049319A (ja) | リハビリ動作評価方法及びリハビリ動作評価装置 | |
| JP3569188B2 (ja) | ウォーキング判定装置 | |
| CN112494034B (zh) | 基于3d体态检测分析的数据处理分析系统及方法 | |
| KR102412841B1 (ko) | 고령자 헬스케어를 위한 스마트 보행 시뮬레이터 | |
| KR102395937B1 (ko) | 보행 시간-주파수 분석에 기초한 건강 상태 예측 방법 및 시스템 | |
| JP6439106B2 (ja) | 身体歪みチェッカー、身体歪みチェック方法およびプログラム | |
| JP6997228B2 (ja) | 深層筋状態の推定装置 | |
| JP6552875B2 (ja) | 移動運動解析装置、方法及びプログラム | |
| KR101945338B1 (ko) | 체력 측정 진단에 대한 체력 개선 시스템 | |
| US20220406206A1 (en) | Recording medium recorded with cardiopulmonary resuscitation training program, cardiopulmonary resuscitation training method, apparatus, and system | |
| CN112753056B (zh) | 用于身体部位的体育训练的系统和方法 | |
| JP6492375B2 (ja) | 歩行測定機の作動方法 | |
| RU2825697C2 (ru) | Система вычисления стадии развития ребенка |