JP2020501642A - 医療機器における電磁干渉の低減 - Google Patents
医療機器における電磁干渉の低減 Download PDFInfo
- Publication number
- JP2020501642A JP2020501642A JP2019527514A JP2019527514A JP2020501642A JP 2020501642 A JP2020501642 A JP 2020501642A JP 2019527514 A JP2019527514 A JP 2019527514A JP 2019527514 A JP2019527514 A JP 2019527514A JP 2020501642 A JP2020501642 A JP 2020501642A
- Authority
- JP
- Japan
- Prior art keywords
- conductor
- transducer
- polarization
- medical device
- polarization transducer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/445—Details of catheter construction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/56—Details of data transmission or power supply
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52077—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging with means for elimination of unwanted signals, e.g. noise or interference
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52079—Constructional features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2063—Acoustic tracking systems, e.g. using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2072—Reference field transducer attached to an instrument or patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3925—Markers, e.g. radio-opaque or breast lesions markers ultrasonic
- A61B2090/3929—Active markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4263—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors not mounted on the probe, e.g. mounted on an external reference frame
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- Gynecology & Obstetrics (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Transducers For Ultrasonic Waves (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
Description
Claims (15)
- 医療機器のシャフトに取り付けられるトランスデューサ積層体であって、前記トランスデューサ積層体は、
第1の細長いフォイルと、
第2の細長いフォイルと、
第1の導電体と、
第2の導電体と、
超音波信号を検出するための第1の分極トランスデューサと、
超音波信号を検出するための第2の分極トランスデューサとを備え、
前記第1の細長いフォイル、前記第2の細長いフォイル、前記第1の導電体、及び前記第2の導電体はそれぞれ長軸に沿って延び、
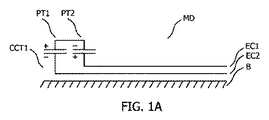
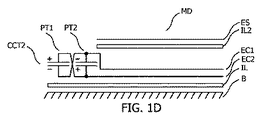
前記長軸沿いの第1の位置において、前記第1の導電体、前記第2の導電体、前記第1の分極トランスデューサ、及び前記第2の分極トランスデューサは、前記第1の細長いフォイルと前記第2の細長いフォイルとの間に挟まれており、前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは、互いに隣接するように、かつ、前記第1の細長いフォイルに面する各々の外面が反対の極性を有するように配置され、前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは、前記第1の導電体と前記第2の導電体との間に、i)直列にかつ同じ極性で電気接続されるか、又はii)並列にかつ同じ極性で電気接続され、
前記長軸沿いの第2の位置において、前記第1の導電体及び前記第2の導電体は、前記第1の細長いフォイルと前記第2の細長いフォイルとの間に挟まれており、前記第1の分極トランスデューサ及び前記第2の分極トランスデューサはいずれも、前記第1の細長いフォイルと前記第2の細長いフォイルとの間に挟まれていない、
トランスデューサ積層体。 - 前記トランスデューサ積層体はさらに差動増幅回路を備え、前記差動増幅回路は、前記第1の導電体及び前記第2の導電体と電気接続されており、また、前記第1の導電体によって運ばれる電気信号と前記第2の導電体によって運ばれる電気信号との間の増幅された差分に対応する増幅された差分電気信号を生成する、請求項1に記載のトランスデューサ積層体。
- 請求項1又は2に記載のトランスデューサ積層体を備える、医療機器。
- 前記医療機器はシャフトを含み、前記トランスデューサ積層体は前記シャフトの周りに巻き付けられる、請求項3に記載の医療機器。
- 超音波信号と電磁干渉とを識別するための、ソフトウェアによって実装される方法であって、前記方法は、
差動増幅回路を用いて、請求項3に記載の医療機器の前記第1の導電体によって運ばれる電気信号と前記第2の導電体によって運ばれる電気信号との間の差分を増幅し、増幅された差分電気信号を提供するステップであって、前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは超音波信号を検出する、ステップと、
アナログ−デジタル変換回路を用いて、前記増幅された差分電気信号をデジタル信号に変換するステップとを含む、方法。 - 超音波イメージングプローブと、
画像再構成ユニットと、
位置決定ユニットと、
医療機器であって、
ボディと、
第1の導電体と、
第2の導電体と、
超音波信号を検出するための第1の分極トランスデューサと、
超音波信号を検出するための第2の分極トランスデューサとを備え、
前記第1の導電体及び前記第2の導電体はそれぞれ前記ボディに沿って延び、
前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは、それらの外面が反対の極性を有するように前記ボディに取り付けられており、
前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは、前記第1の導電体と前記第2の導電体との間に、i)直列にかつ同じ極性で電気接続されるか、又はii)並列にかつ同じ極性で電気接続される、医療機器と、
差動増幅回路と、
アイコン提供ユニットとを備える位置追跡システムであって、
前記超音波イメージングプローブは、超音波場内の超音波信号を生成及び検出し、
前記画像再構成ユニットは、前記超音波イメージングプローブによって生成及び検出された前記超音波信号に基づいて、前記超音波場に対応する再構成された超音波画像を提供し、
前記差動増幅回路は、前記医療機器の前記第1の導電体及び前記第2の導電体に電気接続されており、また、前記超音波イメージングプローブと前記医療機器との間で送られた超音波信号の検出に応答して、前記第1の導電体によって運ばれる電気信号と前記第2の導電体によって運ばれる電気信号との間の増幅された差分に対応する増幅された差分電気信号を供給し、
前記位置決定ユニットは、前記増幅された差分電気信号を受信し、前記増幅された差分電気信号、及び前記超音波イメージングプローブと前記医療機器との間で送られた前記超音波信号に基づいて、前記超音波場に対する前記医療機器の位置を計算し、
前記アイコン提供ユニットは、前記再構成された画像において、前記超音波場に対する前記医療機器の位置を示すアイコンを提供する、位置追跡システム。 - 前記医療機器はさらに、i)電気シールド及び/又はii)絶縁体層を含み、前記電気シールドは、少なくとも前記第1の導電体及び前記第2の導電体を前記電気シールドと前記ボディとの間に挟み、前記絶縁体層は、前記ボディと前記第1の分極トランスデューサ及び前記第2の分極トランスデューサの両方との間に配置される、請求項6に記載の位置追跡システム。
- 前記医療機器の前記ボディは細長い形状を有する、請求項6に記載の位置追跡システム。
- 前記第1の導電体及び前記第2の導電体はそれぞれ、前記細長いボディの周りにらせん状に巻かれる、請求項8に記載の位置追跡システム。
- 前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは、前記細長いボディの周りにリング状に巻かれる、請求項9に記載の位置追跡システム。
- 前記細長いボディは軸を有し、前記第1の分極トランスデューサ及び前記第2の分極トランスデューサは前記軸沿いに分離される、請求項10に記載の位置追跡システム。
- 前記ボディは針を含む、請求項6乃至11のいずれか一項に記載の位置追跡システム。
- 前記第1の分極トランスデューサ及び前記第2の分極トランスデューサはそれぞれ圧電材料から形成される、請求項6乃至12のいずれか一項に記載の位置追跡システム。
- 前記第1の導電体及び前記第2の導電体はそれぞれワイヤーから形成される、請求項6乃至13のいずれか一項に記載の位置追跡システム。
- 前記超音波イメージングプローブと前記医療機器との間で送られる前記超音波信号は、i)前記超音波イメージングプローブによって生成されるか、又はii)前記超音波イメージングプローブに取り付けられた少なくとも3つの超音波エミッタによって生成される、請求項6に記載の位置追跡システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16200430.3 | 2016-11-24 | ||
| EP16200430 | 2016-11-24 | ||
| PCT/EP2017/079382 WO2018095793A1 (en) | 2016-11-24 | 2017-11-16 | Electromagnetic interference reduction in a medical device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020501642A true JP2020501642A (ja) | 2020-01-23 |
| JP2020501642A5 JP2020501642A5 (ja) | 2020-03-05 |
Family
ID=57396314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019527514A Pending JP2020501642A (ja) | 2016-11-24 | 2017-11-16 | 医療機器における電磁干渉の低減 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210275254A1 (ja) |
| EP (1) | EP3544516A1 (ja) |
| JP (1) | JP2020501642A (ja) |
| CN (1) | CN109982648A (ja) |
| WO (1) | WO2018095793A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3833262B1 (en) * | 2018-08-08 | 2022-03-02 | Koninklijke Philips N.V. | Interventional device with electrical connections |
| EP3633799A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Interventional device with electrical connections |
| EP3833264B1 (en) * | 2018-08-08 | 2022-01-26 | Koninklijke Philips N.V. | Interventional device with an ultrasound transducer |
| WO2020030453A1 (en) * | 2018-08-08 | 2020-02-13 | Koninklijke Philips N.V. | Reducing sensor interference in a medical device |
| EP3632334A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Interventional device with an ultrasound transducer |
| EP3632335A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Reducing sensor interference in a medical device |
| WO2020030546A1 (en) * | 2018-08-08 | 2020-02-13 | Koninklijke Philips N.V. | Interventional device with pvdf ultrasound detector |
| WO2020099281A1 (en) * | 2018-11-15 | 2020-05-22 | Koninklijke Philips N.V. | Simultaneous sensor tracking in medical interventions |
| US20200297307A1 (en) * | 2019-03-20 | 2020-09-24 | Avent, Inc. | Catheter with Seal Layer |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4784154A (en) * | 1986-11-13 | 1988-11-15 | Colin Electronics Co., Ltd. | Interference resistant biomedical transducer |
| US5298828A (en) * | 1990-11-02 | 1994-03-29 | Commonwealth Scientific And Industrial Research Organisation | Ultrasonic electroacoustic transducer |
| US6217518B1 (en) * | 1998-10-01 | 2001-04-17 | Situs Corporation | Medical instrument sheath comprising a flexible ultrasound transducer |
| US7709997B2 (en) | 2008-03-13 | 2010-05-04 | Ultrashape Ltd. | Multi-element piezoelectric transducers |
| CN101480347B (zh) * | 2009-01-20 | 2011-01-05 | 深圳市蓝韵实业有限公司 | 一种四维超声探头电机控制系统 |
| EP2566394B1 (en) | 2010-05-03 | 2016-12-14 | Koninklijke Philips N.V. | Ultrasonic tracking of ultrasound transducer(s) aboard an interventional tool |
| EP2797179A1 (en) * | 2013-04-24 | 2014-10-29 | Koninklijke Philips N.V. | Inductive disturbance reduction device |
| JP6636446B2 (ja) | 2014-04-10 | 2020-01-29 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 圧電ポリマセンサを有するニードル |
| EP3128924B1 (en) | 2014-04-11 | 2020-06-10 | Koninklijke Philips N.V. | Signal versus noise discrimination needle with piezoelectric polymer sensors |
| WO2015155630A1 (en) * | 2014-04-11 | 2015-10-15 | Koninklijke Philips N.V. | Needle with thin film piezoelectric sensors |
-
2017
- 2017-11-16 CN CN201780072479.1A patent/CN109982648A/zh active Pending
- 2017-11-16 JP JP2019527514A patent/JP2020501642A/ja active Pending
- 2017-11-16 US US16/348,883 patent/US20210275254A1/en not_active Abandoned
- 2017-11-16 EP EP17809209.4A patent/EP3544516A1/en not_active Withdrawn
- 2017-11-16 WO PCT/EP2017/079382 patent/WO2018095793A1/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN109982648A (zh) | 2019-07-05 |
| WO2018095793A1 (en) | 2018-05-31 |
| US20210275254A1 (en) | 2021-09-09 |
| EP3544516A1 (en) | 2019-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020501642A (ja) | 医療機器における電磁干渉の低減 | |
| US11864948B2 (en) | Needle with thin film sensors | |
| JP2020501642A5 (ja) | ||
| WO2008056643A1 (en) | Ultrasonic probe and ultrasonographic device using the same | |
| JP2008546482A (ja) | 音響センサ | |
| EP3128931A1 (en) | Needle with piezoelectric polymer sensors | |
| RU2695259C2 (ru) | Игла с несколькими датчиками | |
| US20160114193A1 (en) | Multilayer ultrasound transducers for high-power transmission | |
| US9246077B2 (en) | Ultrasonic transducer device, head unit, probe, and ultrasonic imaging apparatus | |
| US9166141B2 (en) | Process of manufacturing a piezopolymer transducer with matching layer | |
| US20210307716A1 (en) | Interventional device with an ultrasound transducer | |
| JP7280347B2 (ja) | 医療装置におけるセンサ干渉の低減 | |
| JP2021019927A (ja) | 超音波探触子および超音波検出装置 | |
| EP2549273B1 (en) | Ultrasonic probe using rear-side acoustic matching layer | |
| US20220409173A1 (en) | Implantable ultrasonic transducer | |
| EP3833264B1 (en) | Interventional device with an ultrasound transducer | |
| EP3833267B1 (en) | Reducing sensor interference in a medical device | |
| JP7059438B2 (ja) | 電気接続を備える介入デバイス | |
| JP2021524354A (ja) | Pvdf超音波検出器を有する介入装置 | |
| US11832896B2 (en) | Interventional device with electrical connections | |
| US20220131065A1 (en) | Sensor comprising an interconnect having a carrier film | |
| JP2020202357A (ja) | 圧電センサ及び積層体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191225 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191225 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20191225 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200121 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200901 |