JP2020162191A - Axial gap type rotary electric machine - Google Patents
Axial gap type rotary electric machine Download PDFInfo
- Publication number
- JP2020162191A JP2020162191A JP2019055915A JP2019055915A JP2020162191A JP 2020162191 A JP2020162191 A JP 2020162191A JP 2019055915 A JP2019055915 A JP 2019055915A JP 2019055915 A JP2019055915 A JP 2019055915A JP 2020162191 A JP2020162191 A JP 2020162191A
- Authority
- JP
- Japan
- Prior art keywords
- base
- electric machine
- rotary electric
- gap type
- type rotary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
【課題】磁気特性への影響が小さく、かつ、永久磁石を破損することなく強固に保持できるロータ構造のアキシャルギャップ型回転電機を提供する。【解決手段】アキシャルギャップ型回転電機1000において、回転子200は、円盤状の基台220と、固定子200と対向する基台220の円盤面上に環状に配置された複数の磁石210と、円盤面上に設けられ磁石210を保持する複数の保持部230と、を有し、複数の磁石210には、基台220の周方向における長さが縮小する周方向縮小部211が設けられ、複数の保持部230には、基台220の周方向における長さが拡大する周方向拡大部231が設けられ、基台220の周方向に並んで配置された2つの保持部230の周方向拡大部231が、それぞれ、複数の磁石210のうち2つの保持部230の間に配置された1つの磁石210の周方向縮小部211と接触している。【選択図】図1(b)PROBLEM TO BE SOLVED: To provide an axial gap type rotary electric machine having a rotor structure, which has a small influence on magnetic characteristics and can firmly hold a permanent magnet without damaging it. SOLUTION: In an axial gap type rotary electric machine 1000, a rotor 200 includes a disk-shaped base 220, a plurality of magnets 210 arranged in an annular shape on the disk surface of the base 220 facing the stator 200, and the like. A plurality of holding portions 230 provided on the disk surface to hold the magnet 210, and the plurality of magnets 210 are provided with a circumferential reducing portion 211 whose length in the circumferential direction of the base 220 is reduced. The plurality of holding portions 230 are provided with a circumferential expansion portion 231 that expands the length in the circumferential direction of the base 220, and the circumferential expansion of two holding portions 230 arranged side by side in the circumferential direction of the base 220. Each of the portions 231 is in contact with the circumferential reduction portion 211 of one magnet 210 arranged between the two holding portions 230 of the plurality of magnets 210. [Selection diagram] FIG. 1 (b)
Description
本発明は、アキシャルギャップ型回転電機に関する。 The present invention relates to an axial gap type rotary electric machine.
アキシャルギャップ型回転電機は、円盤状のロータ(回転子)と、ステータ(固定子)が回転軸方向に対向して配置された構造をもつ。回転トルクを発生させるロータとステータの対向面の面積はロータ径の2乗に比例して増加するため、アキシャルギャップ型回転電機をアスペクト比の小さな形状、すなわち軸方向の寸法よりも径方向の寸法が大きな形状とすることで、出力や効率などの特性を高めやすい特長がある。 The axial gap type rotary electric machine has a structure in which a disk-shaped rotor (rotor) and a stator (stator) are arranged so as to face each other in the direction of the rotation axis. Since the area of the facing surface between the rotor and the stator that generates rotational torque increases in proportion to the square of the rotor diameter, the axial gap type rotary electric machine has a shape with a small aspect ratio, that is, the radial dimension rather than the axial dimension. The large shape makes it easy to improve characteristics such as output and efficiency.
その一方で、アキシャルギャップ型の回転電機は、従来のラジアルギャップ型の回転電機と比べロータが大径化するため、遠心力に対しより強固な保持構造が必要になる。特に、永久磁石が周方向に分割されて複数配置されているロータ構造の場合、独立した永久磁石の位置ずれや飛散を防止するには、径方向に加え、周方向や軸方向の保持も重要となる。ただし、保持強度を高めるために大きな保持部材や金属製の保持部材を用いると、ロータ径の拡大や永久磁石の配置スペースの減少、保持部材の渦電流の発生による磁気特性の低下等を招く。 On the other hand, the axial gap type rotary electric machine has a larger rotor diameter than the conventional radial gap type rotary electric machine, so that a stronger holding structure against centrifugal force is required. In particular, in the case of a rotor structure in which multiple permanent magnets are divided in the circumferential direction and arranged in multiple directions, it is important to hold the permanent magnets in the circumferential direction and the axial direction in addition to the radial direction in order to prevent misalignment and scattering of the independent permanent magnets. It becomes. However, if a large holding member or a metal holding member is used to increase the holding strength, the rotor diameter is increased, the space for arranging the permanent magnets is reduced, and the magnetic characteristics are deteriorated due to the generation of eddy currents in the holding member.
このようなアキシャルギャップ型の回転電機のロータにおける永久磁石の保持構造に関して、例えば、特許文献1には、永久磁石の外周縁部に設けられた半円錐状の凹部と、基材(ヨーク)上に設けられたネジ穴と、その凹部に頭部が収納された状態でそのネジ穴に螺号されて永久磁石を基材(ヨーク)に固定する皿頭ネジとを備えるラジアルギャップ型回転電機が開示されている。 Regarding the holding structure of the permanent magnet in the rotor of such an axial gap type rotary electric machine, for example, Patent Document 1 describes a semi-conical recess provided on the outer peripheral edge of the permanent magnet and a base material (yoke). Disclosure of a radial gap type rotary electric machine including a screw hole provided in the machine and a countersunk screw screwed into the screw hole with the head housed in the recess to fix a permanent magnet to a base material (yoke). Has been done.
特許文献1では、外周縁部に凹部を形成することによる永久磁石の強度の低下や、凹部が皿頭ネジの頭部と接触して凹部周辺に過大な応力が発生する可能性がある。また、凹部周辺の応力集中の抑制や保持部材である皿頭ネジの高強度化のために凹部を拡大すると磁気特性(例えば、透磁率、磁束密度など)が大きく低減する可能性がある。 In Patent Document 1, there is a possibility that the strength of the permanent magnet is lowered due to the formation of the concave portion on the outer peripheral edge portion, or the concave portion comes into contact with the head of the countersunk head screw and excessive stress is generated around the concave portion. Further, if the concave portion is enlarged in order to suppress the stress concentration around the concave portion and to increase the strength of the countersunk head screw which is a holding member, the magnetic characteristics (for example, magnetic permeability, magnetic flux density, etc.) may be significantly reduced.
本発明の目的は、磁気特性への影響が小さく、かつ、永久磁石を強固に保持できるロータ構造を有するアキシャルギャップ型回転電機を提供することにある。 An object of the present invention is to provide an axial gap type rotary electric machine having a rotor structure that has a small influence on magnetic characteristics and can firmly hold a permanent magnet.
上記目標を達成するために、本発明は、固定子と、回転子が前記回転子の中心軸方向に沿って設けられたギャップを介して対向するアキシャルギャップ型回転電機において、前記回転子は、円盤状の基台と、前記固定子と対向する前記基台の円盤面上に前記基台の周方向に沿って配置された複数の磁石と、前記複数の磁石の間にそれぞれ配置され前記複数の磁石を保持する複数の保持部と、を有し、前記複数の磁石は、それぞれ、前記基台の径方向の外側に向かうにつれ、周方向における長さが縮小する周方向縮小部を有し、前記複数の保持部は、それぞれ、前記基台の径方向の外側に向かって、前記基台の周方向における長さが拡大する周方向拡大部を有し、前記複数の保持部のうち前記基台の周方向に並んで配置された2つの保持部の前記周方向拡大部が、それぞれ、前記複数の磁石のうち前記2つの保持部の間に配置された1つの磁石の前記周方向縮小部と接触している。 In order to achieve the above object, the present invention relates to an axial gap type rotor in which a stator and a rotor face each other through a gap provided along the central axis direction of the rotor. A disk-shaped base, a plurality of magnets arranged along the circumferential direction of the base on the disk surface of the base facing the stator, and the plurality of magnets arranged between the plurality of magnets, respectively. The plurality of magnets have a plurality of holding portions for holding the magnets, and each of the plurality of magnets has a circumferential reducing portion whose length in the circumferential direction decreases toward the outside in the radial direction of the base. Each of the plurality of holding portions has a circumferential expanding portion whose length in the circumferential direction of the base increases toward the outside in the radial direction of the base, and among the plurality of holding portions, the said The circumferential expansion of the two holding portions arranged side by side in the circumferential direction of the base, respectively, reduces the circumferential direction of one magnet arranged between the two holding portions of the plurality of magnets. It is in contact with the part.
或いは、アキシャルギャップ型回転電機において、コアと、コア周囲に巻き回されるコイルと、を環状に配置してなる固定子と、前記固定子の軸方向端面にギャップを介して対向する回転子と、を備え、前記回転子が、基台と前記基台の前記固定子側端面に環状に配置された複数の磁石と、を有し、前記磁石が、径方向外側に向かって周方向幅が拡大する拡大部と、前記拡大部から径方向外側に向かって周方向幅が減少する減少部と、を有し複数の前記磁石の間には、前記磁石の周方向側面と接触する保持部材を有する。 Alternatively, in an axial gap type rotor, a stator formed by arranging a core and a coil wound around the core in an annular shape, and a rotor facing the axial end surface of the stator via a gap. The rotor has a base and a plurality of magnets annularly arranged on the stator-side end surface of the base, and the magnets have a circumferential width toward the outside in the radial direction. A holding member having an expanding portion and a decreasing portion whose circumferential width decreases radially outward from the expanding portion, and a holding member in contact with the circumferential side surface of the magnet is provided between the plurality of magnets. Have.
本発明によれば、回転電機の磁気特性の低下や永久磁石の応力集中を抑制しながら、永久磁石を保持することが可能になるため、アキシャルギャップ型回転電機の小型化、高出力化、高効率化が実現できる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。 According to the present invention, it is possible to hold the permanent magnet while suppressing the deterioration of the magnetic characteristics of the rotating electric machine and the stress concentration of the permanent magnet. Therefore, the axial gap type rotating electric machine can be miniaturized, have a high output, and have a high value. Efficiency can be achieved. Issues, configurations and effects other than those described above will be clarified by the description of the following embodiments.
以下、図面を用いて、本発明の第1〜第6の実施形態によるアキシャルギャップ型回転電機の構成及び動作について説明する。なお、各図において、同一符号は同一部分を示す。 Hereinafter, the configuration and operation of the axial gap type rotary electric machine according to the first to sixth embodiments of the present invention will be described with reference to the drawings. In each figure, the same reference numerals indicate the same parts.
〔第1実施形態〕
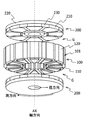
図1(a)は、本発明の第1実施形態に係るアキシャルギャップ型モータ1000(モータ1000)の構成を表わす断面斜視図である。図1(a)に示すように、モータ1000は、扁平な円筒形状を有するステータ(固定子)100と、回転軸心AXの軸方向(以下、軸方向)においてステータ100の両側に位置し軸心AXを中心に回転する円盤状の2つのロータ(回転子)200と、2つのロータ200に連結され軸心AXを中心に回転するシャフト500と、ステータ100とロータ200を収納しステータ100を固定するハウジング300と、軸心AXの軸方向におけるハウジング300の両端に結合され軸受け600を介してシャフト500を支持する2つのブラケット400と、を有している。シャフト500は、軸受600を介して回転自在にブラケット400に結合されている。また、ブラケット400は、ハウジング300の両端に組み付いて固定されている。ハウジング300の外周側面には、図示しない端子台が設けられており、外部出力部が端子台を介し電気的に接続される。
[First Embodiment]
FIG. 1A is a cross-sectional perspective view showing the configuration of the axial gap type motor 1000 (motor 1000) according to the first embodiment of the present invention. As shown in FIG. 1A, the
図1(b)は、ステータ100とロータ200のギャップGを拡大した斜視図である。図中にロータ200の軸方向、径方向、周方向を示す。なお、径方向、周方向は図示した向きに限定されない。また、図1(c)も同様である。図1(c)は、ステータ100側から見たロータ200の部分平面図である。図1(b)に示すように、モータ1000は、永久磁石210を8個、3相交流電源と通電するコイル120が巻かれたコア110を12個有しており、8極12スロットの集中巻3相モータである。
FIG. 1B is an enlarged perspective view of the gap G between the
モータ1000は、図1(b)に示すように、概略円環状のステータ100を、円盤状の2つのロータ200が軸方向から挟むように面対向して配置された所謂ダブルロータ型のアキシャルギャップ型回転電機である。ステータ100には、複数(本実施形態では12個)のコアメンバ101がシャフト500を中心として環状に配列されている。各コアメンバ101は、両端面が台形の柱体であるコア110と、コア110の側面を被覆する筒状のボビン(図示せず)と、ボビンを介してコア110の側面に巻き回された巻線120とを備える。環状に配列された12個のコアメンバ101の夫々は、ハウジング300内に樹脂130によって一体的にモールド加工され、1つのステータ100に成形されている。コア110の軸方向端面は円環状の配列しやすいように、径方向外側の周方向幅が径方向内側の周方向幅より長いものであれば台形に限ったものではない。詳細は第2実施形態で述べるが、例えば、台形以外に、三角形や台形の下底側の一部を切り落としたような多角形でも構わない。本明細書ではこれらの形状を総称して概略台形と記す。
As shown in FIG. 1B, the
各ロータ200は、円盤状の基台220と、ステータ100と対向する基台220の円盤面上に基台220の周方向に沿って環状に配置された複数(本実施形態では8個)の永久磁石210と、複数の永久磁石210の間にそれぞれ配置され複数の永久磁石210を保持する複数の保持部としての保持部材230とを有している。各保持部材230は基台220の周方向に並んで配置された2つの永久磁石210の間に配置されており、本実施形態では永久磁石210と同数の8個が基台220の円盤面上に配置されている。
Each
なお、永久磁石210はボンド磁石、基台220は鉄、保持部材230は樹脂により形成されている。本実施例では、基台220がヨーク(継鉄)の役割を果たすよう透磁率の高い材料として鉄を用いているが、基台220を非磁性体の強度部材と、その強度部材と磁石の間に円盤状のヨークを配置する構成としても構わない。
The
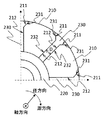
図1(c)に示すように、複数の永久磁石210はそれぞれが扇形の角を切り落としたような形状をしている。具体的には、永久磁石210は径方向内側から径方向外側に向かうにつれて周方向長さが拡大する周方向拡大部212と、周方向拡大部212から径方向外側に向かうにつれて周方向長さが縮小する周方向縮小部211とを備える。すなわち、本実施形態の永久磁石210は基台220の径方向における長さが基台220の径方向の内側から外側に向かってテーパ状に拡大した後にテーパ状に縮小する形状を有している。
As shown in FIG. 1 (c), each of the plurality of
また、複数の保持部材230のそれぞれは、磁石210の周方向側面に沿った形状を備える。具体的には、径方向外側に向かって周方向長さが一定である周方向等幅部232と周方向等幅部232から径方向外側に向かって周方向長さがテーパ状に拡大する周方向拡大部231からなる。すなわち、本実施形態の保持部材230は基台220の径方向における長さが基台220の径方向の内側から外側に向かって一定に保持された後にテーパ状に拡大する形状を有している。
Further, each of the plurality of holding
永久磁石210の周方向縮小部211は、それぞれ、基台220の周方向の一方側及び他方側で隣接する2つの保持部材230の周方向拡大部231と面接触している。換言すると、複数の保持部材230のうち基台220の周方向に並んで配置された2つの保持部材230の周方向拡大部231は、それぞれ、複数の永久磁石210のうち当該2つの保持部材230の間に配置された1つの永久磁石210の周方向縮小部211と面接触している。なお、周方向拡大部231と周方向縮小部211は必ずしも面接触する必要はなく、1以上の点で接触していても良い。
The
また、同様に、永久磁石210の周方向拡大部212は、それぞれ、基台220の周方向の一方側及び他方側で隣接する2つの保持部材230の周方向等幅部232と面接触している。なお、周方向拡大部212と周方向等幅部232も必ずしも面接触する必要はなく、1以上の点で接触していても良い。
Similarly, the
また、保持部材230は、永久磁石210が配置された基台220と一体に樹脂モールドで成形される。
Further, the holding
このような構成を有するモータ1000は、以下のように動作する。端子台にインバータ(図示せず)の出力線が接続され、コイル120に3相の交流電流が通電する。これにより、ステータ100には回転磁界が形成され、この回転磁界が永久磁石210によりロータ200に形成された直流磁界と吸引反発してロータ200に回転トルクを発生させる。このことにより、ロータ200が回転し、モータ1000が駆動する。
The
この時、ロータ200には径方向に遠心力、軸方向に磁気吸引力、周方向に回転トルクなどがかかる。とりわけ、基台220に環状に配置された比重の大きな各永久磁石210には大きな遠心力がかかる。本実施形態に係る永久磁石210は、図1(c)に示すステータ100側から見た形状が、後述する磁束を有効に活用する形状であるため、重量あたりの磁束量を大きくすることができる。そのため、所望の磁束量を得るために必要な磁石量を少なくでき、遠心力を軽減することができる。また、永久磁石210が基台220の外径方向に向かう遠心力を受けても、永久磁石210の周方向縮小部211が保持部材230の周方向拡大部231に押し当たるため、永久磁石210は飛散しない。また、保持部材230は樹脂で構成されているため、保持部材230を配置したことによる漏れ磁束や渦電流の増大もない。
At this time, centrifugal force is applied to the
次に、永久磁石210の形状がモータ1000の特性に及ぼす影響を有限要素法により解析した結果を図1(f)と図1(g)を用いて説明する。図1(f)は、解析に用いた永久磁石210とコア110の軸方向の投影図である。図1(f)に示す永久磁石210の内径φinと外径φout、隣接する永久磁石間の距離(極間)Dをパラメータとし、無負荷でロータ200を回転させた時に発生する誘起電圧を解析した。前記パラメータ以外のコイル120の巻数やロータ200の回転速度、モータ1000の温度などは一定値としている。そのため、誘起電圧の変化量は、前記パラメータを変動させることにより変化する永久磁石210の形状が、コア110を通過する磁束量に対してどのように影響するかを表している。
Next, the results of analyzing the influence of the shape of the
図1(g)は、前記パラメータを変動させたときの、永久磁石210の磁石量の低減率と誘起電圧の低減率の関係を示したグラフである。図1(g)に示すように、永久磁石210の磁石量の低減率に対する誘起電圧の低減率は、永久磁石の外径φoutを縮小させたときに最大となり、次いで内径φinを増加させたとき、そして、極間Dを増加させたときの順に減少することがわかる。特に、極間Dを増加させたときの誘起電圧の低減率は極めて小さい。したがって、極間Dを増加させ永久磁石210の軸方向の断面積を低減することにより、永久磁石210から放出されコア110を通過する単位重量あたりの磁束量を高めることができる。そのため、永久磁石210の重量を軽減でき、永久磁石210にはたらく遠心力を低減することができる。
FIG. 1 (g) is a graph showing the relationship between the reduction rate of the magnet amount of the
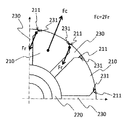
図1(h)は、永久磁石210にかかる遠心力Fcと保持部材230による永久磁石210の保持力Frを説明した概念図である。永久磁石210にかかる遠心力Fcにより、永久磁石210は基台220の外径方向に移動しようとする。しかし、永久磁石210の周方向縮小部211が保持部材230の周方向拡大部231と接触することにより、永久磁石210には反力Frがかかり永久磁石210は飛散することなく基台220の円盤面上に留まる。また、永久磁石210に作用する力は主として圧縮応力であるため、比較的強度が低いボンド磁石を永久磁石210に使用しても、破損することなく保持することができる。
FIG. 1H is a conceptual diagram illustrating the centrifugal force Fc applied to the
以上より、永久磁石210の極間Dに空間を確保し、その空間に永久磁石210を保持する保持部材230を配置したロータ200によれば、限られたロータの円盤面を有効に利用し、永久磁石210の磁気特性と機械強度を両立できる。したがって、モータ1000の出力密度の向上(小型、高出力化)、高効率化と、永久磁石210の応力集中の抑制が可能となる。さらに、永久磁石量削減による低コスト化も可能になる。
Based on the above, according to the
なお、本実施形態では、周方向縮小部211が、基台220の径方向における永久磁石210の外側に設けられ、周方向拡大部231が、基台220の径方向における保持部材230の外側に設けた例を示したが、周方向縮小部211と周方向拡大部231が接触できれば良く、周方向縮小部211と周方向拡大部231の位置は適宜変更可能である。例えば、基台220の径方向における内側(基台220の内周側)や、基台220の径方向における中間部、または基台220の径方向における内側から外側に向かって連続した形状であっても良い。また、周方向縮小部211と周方向拡大部231は、図1(c)に示すテーパ形状に限らず、櫛歯形状や円弧形状、波形状であってもよい。
In the present embodiment, the
保持部材230は、強度の確保と、漏れ磁束や渦電流の抑制を両立するため、ガラス繊維が入ったPBT(ポリブチレンテレフタレート樹脂)やBMC(不飽和ポリエステル樹脂)、FRP(繊維強化プラスチック)やCFRP(炭素繊維強化プラスチック)などの樹脂材で構成することが望ましい。また、漏れ磁束や渦電流への影響が無視できればアルミや鉄などの金属で構成しても良い。永久磁石210の材料に射出成形可能なボンド磁石を用いることで形状自由度が高まり、周方向縮小部211の形成を様々にすることが容易になる。
The holding
また、上述の説明で用いた保持部材230は複数個に分割されているが、保持部材230とそれを一体化する保持部基台233とを備える保持部材としても構わない。例えば、基台220に周方向に配置した永久磁石210(図1(d))を、図1(e)に示すように保持部材230と一体として成形された保持部材基台233が永久磁石210の表面を覆うようにしても良い。保持部材基台233で永久磁石210の表面を覆うことで、永久磁石210を保護し、局所的な脱離などを防ぐことができる。或いは、保持部材基台を、環状に配置された複数の永久磁石210の内側(軸心側)に円環状に形成し、8本の突起状の保持部材230が保持部材基台から径方向外側へ延伸する形状としても構わない(図示せず)。或いは、環状に配置された複数の永久磁石210の外側に円環状の保持部材基台を設け、保持部材基台から径方向内側へ8本の保持部材230が延伸する形状でも構わない。この場合、永久磁石210の材質は、フェライトやネオジムの焼結磁石であってもよい。また、保持部材230を基台220に固定する方法は、基台220と一体としてモールド樹脂成形する方法だけでなく、接着剤による接着などを用いてもよい。
Further, although the holding
また、本実施形態では、永久磁石210の数が8個、コア110の数が12個であることから、8極12スロットであり、極数とスロット数の比は2:3である。このように極数とスロット数の比を2:3とすると、本実施形態に比して極数とスロット数が近い分数スロット(例えば10極12スロットや14極12スロット)に比べ、永久磁石1極分に割り当てられる角度が1スロット分のコアに割り当てられる角度よりも大きくなるので、永久磁石210の極間Dを拡大しても電気特性への影響が少なく、保持部材230の配置や固定がし易い利点がある。
Further, in the present embodiment, since the number of
本実施形態では、ダブルロータ型のアキシャルギャップ型回転電機を例として説明したが、他の構造のアキシャルギャップ型電動機に適用することもできる。更には、モータではなく発電機に適用してもよい。 In the present embodiment, the double rotor type axial gap type rotary motor has been described as an example, but it can also be applied to an axial gap type electric motor having another structure. Furthermore, it may be applied to a generator instead of a motor.
<まとめ>
次に本実施形態に含まれる特徴及び効果について説明する。本実施形態に係る永久磁石210には周方向縮小部211が形成され、保持部材230には周方向拡大部231が形成されている。そのため、永久磁石210は、基台220の外径方向に向かう遠心力を受けても、永久磁石210の周方向縮小部211が保持部材230の周方向拡大部231に押し当たるため、永久磁石210は飛散しない。また、永久磁石210の周方向縮小部211と保持部材230の周方向拡大部231はテーパ形状であるため、作りやすく壊れにくい。また、永久磁石210の周方向縮小部211と保持部材230の周方向拡大部231はテーパ面で面接触するため、壊れにくい。
<Summary>
Next, the features and effects included in the present embodiment will be described. The
また、周方向縮小部211は、基台220の径方向における永久磁石210の外径側に設けられ、周方向拡大部231は、基台220の径方向における保持部材230の外径側に設けられている。そのため、永久磁石210は、外径側に設けられた周方向縮小部211にかかる保持部材230の周方向拡大部231からの反力と、永久磁石210にかかる遠心力より圧縮されている。したがって、永久磁石210に引張応力がかからず比較的強度が低い磁石を使用しても、破損せず保持することができる。
Further, the
また、極数とスロット数の比が2:3となっている。そのため、極数とスロット数が近い分数スロット(例えば10極12スロットや14極12スロット)に比べ、永久磁石1極分に割り当てられる角度が1スロット分のコアに割り当てられる角度よりも大きくなり、電気特性への影響が少なく、保持部材230の配置や固定がし易い。
The ratio of the number of poles to the number of slots is 2: 3. Therefore, the angle assigned to one permanent magnet pole is larger than the angle assigned to the core for one slot, as compared to fractional slots (for example, 10 poles 12 slots or 14 poles 12 slots) whose number of poles is close to the number of slots. The effect on the electrical characteristics is small, and the holding
また、保持部材230は樹脂で構成されている。そのため、保持部材230を配置しても漏れ磁束や渦電流の増大がない。また、保持部材230は、永久磁石210が配置された基台220と一体に樹脂モールドで成形される。そのため、永久磁石210を基台220に確実に固定できる。また、保持部材230が永久磁石210の表面まで覆うようにしても良い。保持部材230で永久磁石210の表面を覆うことで、永久磁石210を保護し、局所的な脱離などを防ぐことができる。
Further, the holding
また、極間Dを増加させ永久磁石210の回転軸心方向の断面積を低減することにより、永久磁石210からコア110に対して放出される単位重量あたりの磁束量を高めている。そのため、永久磁石210の重量を軽減でき、遠心力を低減することができる。
Further, by increasing the pole-to-pole D and reducing the cross-sectional area of the
また、永久磁石210の極間Dに空間を確保し、その空間に永久磁石210を保持する保持部材230を配置したロータ200によれば、限られたロータの円盤面を有効に利用し、永久磁石210の磁気特性と機械強度を両立できる。したがって、モータ1000の出力密度の向上(小型、高出力化)、高効率化と、永久磁石210の応力集中の抑制が可能となる。さらに、永久磁石量削減による低コスト化も可能になる。
Further, according to the
〔第2実施形態〕
図2(a)に、本発明の第2実施形態に係るアキシャルギャップ型モータ2000のコア2110の斜視図を示す。また、図2(b)に、第2実施形態に係るアキシャルギャップ型モータ2000のコア2110と永久磁石210の軸方向投影図を示す。なお、第1実施形態と同じ構成に関しては説明を省略する。
[Second Embodiment]
FIG. 2A shows a perspective view of the
図2(a)に示すように、環状に配置された複数のコア2110は、それぞれ、ロータ200に対向して配置される2つ軸方向端面を底面とする柱体である。各コア2110の軸方向端面の形状は、ロータ200の周方向における長さがロータ200の径方向の外側に向かって大きくなる台形部2113と、ロータ200の周方向における長さが台形部2113の底辺と同一な辺を有する矩形部2114とを合わせた形状となっている。本実施形態の台形部2113は等脚台形であり、その2つの脚(辺)はロータ200の外径方向に向かって拡大するテーパ部2111を形成している。
As shown in FIG. 2A, the plurality of
また、図2(b)に示すように台形部2113の一方の脚は、ロータ200の周方向で隣接する他のコア2110の台形部2113の脚と略平行になっている。また、矩形部2114において向かい合う2つの短辺はストレート部2111を形成している。また、コア2110は、電磁鋼板や鉄基アモルファス金属、ナノ結晶などの矩形状の薄板磁性体をロータ200の径方向に積層することにより形成されている。なお、この積層形状は、第1実施形態のコア110についても同様で、コア2110とコア110の相違は矩形部2114の有無となる。
Further, as shown in FIG. 2B, one leg of the
ところで、薄板磁性体の厚みにばらつきがあった場合にコア2110の径方向寸法は変動してしまう。しかし、第2実施形態のコア2110では、矩形部2114の積層枚数を調整することにより、コア2110の径方向寸法を所定の寸法誤差範囲内に収容することができる。
By the way, when the thickness of the thin plate magnetic material varies, the radial dimension of the
また、本実施形態に係る永久磁石210には、図2(b)に示すように、外径側に切り欠き部214が設けられ、周方向縮小部211が形成されている。このような形状のコア2110と永久磁石210を組み合わることで、図1(b)のような台形柱のコア110に比べ、永久磁石210とコア2110の軸方向の投影形状が近似する。そのため、永久磁石210に周方向縮小部211を形成するために切り欠き部214が設けられても、コア2110を通過する磁束量の低下が少ない。したがって、本実施形態に係るアキシャルギャップ型モータ2000によれば、コア2110の断面形状のばらつきによるモータ特性のばらつきが抑制でき、さらに、モータの出力密度向上(小型、高出力化)や高効率化、永久磁石量削減による低コスト化に優れた構造とすることができる。
Further, as shown in FIG. 2B, the
なお、本実施形態では、回転軸に垂直な方向におけるコア断面形状が同一となるオープンスロットのコア2110を示したが、コア2110の断面形状は少なくともロータ200に対向した面(軸方向端面)にテーパ部2111とストレート部2112を有していればよく、その他の部分は任意の形状として良い。例えば、コア2110の断面積が中心部で縮小するセミクローズ形状であってもよい。また、薄板磁性体の積層方向はロータ周方向であっても良いし、鉄粉を圧縮成形した圧分磁心のような非積層体でコアを構成してもよいのは他の実施形態も同様である。
In the present embodiment, the
<まとめ>
次に本実施形態に含まれる特徴及び効果について説明する。本実施形態に係るコア2110は、矩形状の薄板磁性体を径方向に積層することにより形成され、台形の柱体である台形部2113と、前記台形の下底を長辺としストレート部2112を短辺とする矩形の柱体である矩形部2114を合わせた柱体となっている。そのため、コア2110を形成する薄板磁性体の厚みにばらつきがあった場合でも、矩形部2114の積層枚数を調整することにより、コア2110の径方向寸法を所定の寸法誤差範囲内に収容することができる。また、矩形部2114を有するコア2110は、図1(b)のような台形柱のコア110に比べ、切り欠き部214を有する永久磁石210との軸方向の投影形状が近似する。そのため、永久磁石210に周方向縮小部211を形成するために切り欠き部214が設けられても、コア2110を通過する磁束量の低下が少ない。したがって、本実施形態に係るアキシャルギャップ型モータ2000によれば、コア2110の断面形状のばらつきによるモータ特性のばらつきが抑制でき、さらに、モータの出力密度向上(小型、高出力化)や高効率化、永久磁石量削減による低コスト化に優れた構造とすることができる。
<Summary>
Next, the features and effects included in the present embodiment will be described. The
〔第3実施形態〕
図3(a)に、本発明の第3実施形態に係るアキシャルギャップ型モータ3000のロータ3200の斜視図および断面斜視図を示す。また、図3(b)にロータ3200の分解図を示す。ここでは、ロータ3200以外の構成は第1実施形態のアキシャルギャップ型モータ1000(図1(a))と同じため省略する。
[Third Embodiment]
FIG. 3A shows a perspective view and a cross-sectional perspective view of the
図3(b)に示すように、複数の永久磁石3210には、それぞれ、基台3220軸方向においてステータ100に向かい基台3220の周方向における長さが縮小しテーパ形状となった軸方向縮小部3212が設けられている。また、複数の保持部材3230には、それぞれ、基台3220の軸方向においてステータ100側に向かって、基台3220の周方向における長さが拡大してテーパ形状となった軸方向拡大部3232が設けられている。そして、複数の保持部材3230のうち基台3220の周方向に並んで配置された2つの保持部材3230の軸方向拡大部3232が、それぞれ、複数の永久磁石3210のうち当該2つの保持部材3230の間に配置された1つの永久磁石3210の軸方向縮小部3212と接触している。
As shown in FIG. 3B, each of the plurality of
また、保持部材3230における基台3220の径方向の略中央には孔3231が設けられており、この孔3231にネジ3240を挿入し、基台3220に形成されたネジ穴3221にネジ3240を螺合することにより、保持部材3230と基台3220は締結されている。
Further, a
本実施形態によれば、永久磁石3210の軸方向縮小部3212の側面と保持部材3230の軸方向拡大部3232の側面とが接触した状態で永久磁石3210が基台3220に固定されるため、永久磁石3210のステータ100方向への飛散を防止できる。また、保持部材3230がネジ3240により機械的に基台3220と締結されるため、基台3220の径方向、周方向、軸方向に強固に保持され、永久磁石3210の保持強度が向上する。
According to the present embodiment, the
なお、ネジ3240を保持部材3230の孔3231に挿入し、基台3220に形成されたネジ穴3221にネジ3240を螺合することにより、保持部材3230とヨーク基台3220は締結されている例を示したが他の固着具により保持部材3230とヨーク基台3220を締結してもよい。例えば、保持部材と基台に設けられた穴に液状の樹脂を注ぎ、熱硬化等の処理によって内部で硬化させて保持部材3230とヨーク基台3220を締結してもよい。また、保持部材と基台に設けられた穴に樹脂製等のリベットを差し込んでかしめることにより保持部材3230とヨーク基台3220を締結してもよい。
An example in which the holding
図3(c)に示すように、保持部材は、環状に配置された複数の永久磁石3210の内側に環状に形成された保持部材基台3233と複数の保持部材3230と連結させて一体として形成してもよい。また、環状の保持部材基台は、環状に配置された複数の永久磁石3210の内側ではなく外側に形成してもよい。
As shown in FIG. 3C, the holding member is integrally formed by connecting the holding
<まとめ>
次に本実施形態に含まれる特徴及び効果について説明する。本実施形態に係るロータ3200は、複数の永久磁石3210に基台3220軸方向においてステータ100に向かい基台3220の周方向における長さが縮小しテーパ形状となった軸方向縮小部3212が設けられ、複数の保持部材3230に基台3220の軸方向のステータ100に向かって、基台3220の周方向における長さが拡大しテーパ形状となった軸方向拡大部3232が設けられている。そして、複数の保持部材3230のうち基台3220の周方向に並んで配置された2つの保持部材3230の軸方向拡大部3232が、それぞれ、複数の永久磁石3210のうち当該2つの保持部材3230の間に配置された1つの永久磁石3210の軸方向縮小部3212と接触している。そのため、永久磁石3210の軸方向縮小部3212の側面と保持部材3230の軸方向拡大部3232の側面とが接触した状態で永久磁石3210が基台3220に固定されるため、永久磁石3210のステータ100方向への飛散を防止できる。
<Summary>
Next, the features and effects included in the present embodiment will be described. The
また、永久磁石3210の軸方向縮小部3211と保持部材3230の周方向拡大部3231はテーパ形状であるため、作りやすく壊れにくい。また、永久磁石3210の周方向縮小部3211と保持部材3230の周方向拡大部3231はテーパ面で面接触するため、壊れにくい。また、保持部材3230がネジ3240により機械的に基台3220と締結されている。そのため、径方向、周方向、軸方向に永久磁石3210は強固に保持される。したがって、本実施形態は、永久磁石3210の保持強度を向上させることができる。
Further, since the axially reducing portion 3211 of the
〔第4実施形態〕
図4(a)は、本発明の第4実施形態に係るアキシャルギャップ型モータ4000のロータ4200の斜視図である。ここでは、ロータ4200以外の構成は第1実施形態のアキシャルギャップ型モータ1000と同じため省略する。
[Fourth Embodiment]
FIG. 4A is a perspective view of the
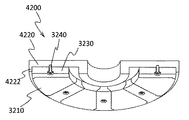
図4(a)の基台4220は、基台4220の外周部からロータ4200の回転軸方向に沿って永久磁石3210側へ突出した鍔部4222を有している。鍔部4222の内周面は、永久磁石3210における基台4220の外径方向の端面の少なくとも一部と接触している。
The
本実施形態に係る構造の効果について図4(b)を用いて説明する。モータ4000の稼働中に永久磁石3210にかかる遠心力Fcは、永久磁石3210の周方向縮小部211と接触する保持部材3230の周方向拡大部231からの反力Fr1と、永久磁石3210における基台4220の外径方向の端面と接触する鍔部4222からの反力Fr2によって保持される。また、保持部材3230は、保持部材3230を基台4220に対して固定しているネジ3240と、保持部材3230における基台4220の外径方向の端面と接触する鍔部4222により保持されている。したがって、保持部材3230の周方向拡大部231から永久磁石3210の周方向縮小部211に対して作用する反力Fr1は、ネジ3240からの反力Fr1’と、鍔部4222からのFr1”に分散される。すなわち、遠心力Fcをネジ3240と鍔部4222に分散して永久磁石3210は保持されるため、保持強度が向上する。また、円筒面状の内周面を有する鍔部4222には、永久磁石3210と保持部材3230の荷重がかかっても、これらの外周の一部に荷重が集中することなく周方向に分散され、鍔部4222への応力集中を抑制できるため保持強度を向上できる。
The effect of the structure according to the present embodiment will be described with reference to FIG. 4 (b). The centrifugal force Fc applied to the
<まとめ>
次に本実施形態に含まれる特徴及び効果について説明する。本実施形態に係る基台4220は、外周径側から永久磁石側へ突出した鍔部4222も有している。そのため、保持部材3230の周方向拡大部231と鍔部4222に力を分散させて永久磁石3210を保持できるため、保持強度を向上させることができる。
<Summary>
Next, the features and effects included in the present embodiment will be described. The
〔第5実施形態〕
図5(a)は、本発明の第5実施形態に係るアキシャルギャップ型モータ5000のロータ5200の斜視図である。また、図5(b)はロータ5200の分解図である。ここでは、ロータ5200以外の構成は第1実施形態のアキシャルギャップ型モータ1000と同じため省略する。
[Fifth Embodiment]
FIG. 5A is a perspective view of the
図5(b)の基台5220は、複数の永久磁石210に対向する部分に溝5222が形成されている、そして、図5(a)に示すように、基台5220より導電率の低い低導電部材5223が溝5222に挿入されている。低導電部材5223は、回転軸を中心に薄板磁性体を巻回したロールにより形成されている。
The
また、図5(b)に示すように、保持部材5230には、基台5220の径方向の内側と外側にそれぞれ孔5231が設けられており、この2つの孔5231のそれぞれにネジ5240を挿入し、基台5220に形成されたネジ穴5221にネジ5240を螺合することにより、複数の保持部材5230は基台5220に固定されている。このことにより、低導電部材5230を溝5222に保持することができる。
Further, as shown in FIG. 5B, the holding
基台5220には永久磁石3210によって直流磁界が発生しているが、ステータ100から放出される交流磁界との相互作用により、コア2110の位置に依存した交流磁界成分が基台5220に発生する。これにより、基台5220には磁界の変化を打ち消すように渦電流が発生する。しかし、本実施形態では、低導電部材5223が基台5220の溝5222に挿入することにより、低導電部材5223による抵抗率が大幅に増加するため、コア2110との磁気的な相互作用により基台5220に発生する渦電流が抑制され、回転トルクや効率を向上することができる。
A DC magnetic field is generated in the
また、低導電部材5223は、保持部材5230を基台5220に固定することにより溝5222に保持されている。そのため、コストを抑制できる。特に低導電部材5230を構成するロールの端面は、薄板の積層面になるため、接着材の塗布が難しく、安定した固定が難しい。しかし、本実施形態によれば接着が不要となり、低導電部材5230を確実に保持することができる。なお、低導電部材5223は径方向に流れる渦電流に対して抵抗率が増加するものであれば、圧粉磁心のような非積層体で構成してもよい。或いは、1枚の磁性体を巻回したものではなく、直径の異なる環状の箔帯をバームクーヘンのような同心円状に複数並べて径方向に積層した積層体でも構わない。
Further, the low
<まとめ>
次に本実施形態の作用及び効果について説明する。本実施形態に係る基台5220は、永久磁石3210に対向する部分に溝5222が形成され、回転軸を中心に薄板磁性体を巻回したロールからなる低導電部材5223が挿入されている。そのため、低導電部材5223による抵抗率が大幅に増加するため、コア2110との磁気的な相互作用により基台5220に発生する渦電流が抑制され、回転トルクや効率を向上することができる。
<Summary>
Next, the action and effect of this embodiment will be described. In the
〔第6実施形態〕
図6は、本発明の第6実施形態に係るアキシャルギャップ型モータ6000のロータ6200の分解図である。なお、ロータ6200の保持部材と、ロータ6200以外の構造は第1実施形態のアキシャルギャップ型モータ1000と同じため省略する。
[Sixth Embodiment]
FIG. 6 is an exploded view of the rotor 6200 of the axial gap type motor 6000 according to the sixth embodiment of the present invention. Since the holding member of the rotor 6200 and the structure other than the rotor 6200 are the same as those of the axial
図6のロータ6200は、基台6220と対向する8個の永久磁石6210の表面に4個の凸部6215が設けられ、前記8個の永久磁石6210と対向する基台6220の円盤面に凸部6215と嵌合する32個の凹部6224が設けられている。8個の永久磁石6210のそれぞれを基台6220に配置させたときに凸部6215のそれぞれを凹部6224に挿入して嵌合させることにより、永久磁石6210を基台6220に固定される。
The rotor 6200 of FIG. 6 is provided with four
これにより、永久磁石6210にかかる遠心力は、保持部材3230の周方向拡大部231と鍔部4222と凸部6215と凹部6224に分散され、一層保持強度が向上する。また、組み立て時に凸部6215を凹部6224に挿入することにより磁石の位置決めができるため、作業効率を向上することができる。
As a result, the centrifugal force applied to the
なお、本実施形態では、1極分の永久磁石6210に4箇所の凸部6215を設けた例を示したが、凸部6210は少なくとも1箇所あればよい。また、保持部材3230に凸部を設け、基台6220に対応する凹部を設けてもよい。
In this embodiment, an example is shown in which the
<まとめ>
次に本実施形態の作用及び効果について説明する。本実施形態に係るロータ6200は、基台6220と対向する複数の永久磁石6210の表面に少なくとも1つの凸部6215が設けられ、永久磁石6210と対向する基台6220の円盤面には凸部6215と嵌合する複数の凹部6224が設けられている。複数の永久磁石6210のそれぞれを基台6220に配置させたときに少なくとも1つの凸部6215のそれぞれを嵌合する凹部6224に挿入させることにより、永久磁石6210を基台6220に固定される事ができる。そのため、永久磁石6210にかかる遠心力は、保持部材3230の周方向拡大部231と鍔部4222と凸部6215と凹部6224に分散され、一層保持強度が向上する。また、組み立て時に凸部6215を凹部6224に挿入することにより磁石の位置決めができるため、作業効率を向上することができる。
<Summary>
Next, the action and effect of this embodiment will be described. In the rotor 6200 according to the present embodiment, at least one
なお、本発明は上記した実施形態に限定されるものではなく、様々な変形例が含まれる。例えば、上述した実施形態は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施形態の構成の一部を他の実施形態の構成に置き換えることが可能であり、また、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について、他の構成の追加・削除・置換をすることが可能である。 The present invention is not limited to the above-described embodiment, and includes various modifications. For example, the above-described embodiment has been described in detail in order to explain the present invention in an easy-to-understand manner, and is not necessarily limited to the one including all the described configurations. Further, it is possible to replace a part of the configuration of one embodiment with the configuration of another embodiment, and it is also possible to add the configuration of another embodiment to the configuration of one embodiment. Further, it is possible to add / delete / replace a part of the configuration of each embodiment with another configuration.
なお、本発明の実施形態は、以下の態様であってもよい。上記の実施形態ではステータ100の両端面にロータ200を対向して配置したが、2つあるステータ100の端面の一方のみにロータ200を対向するシングルロータ方式とし、アキシャルエアギャップ型回転電機の軸方向の長さを短くしても良い。また、交流電源として3相電源を用いたが、異なる位相数の交流電源を用いても良い。
The embodiment of the present invention may have the following aspects. In the above embodiment, the
1000,2000,3000,4000,5000,6000…アキシャルギャップ型回転電機(モータ)、100…ステータ、110,2110…コア、120…巻線、130…樹脂、200,2200,3200,4200,5200,6200…ロータ、210,3210,6210…永久磁石、211…周方向縮小部、3212…軸方向縮小部、220,3220,4220,5220,6220…基台、4222…鍔部、5223…低導電部材、230,3230,5230…保持部材、231…周方向拡大部、3232…軸方向拡大部、D…永久磁石間の距離(極間) 1000, 2000, 3000, 4000, 5000, 6000 ... Axial gap type rotary electric machine (motor), 100 ... Stator, 110, 2110 ... Core, 120 ... Winding, 130 ... Resin, 200, 2200, 3200, 4200, 5200, 6200 ... rotor, 210, 3210, 6210 ... permanent magnet, 211 ... circumferential reduction part, 3212 ... axial reduction part, 220, 3220, 4220, 5220, 6220 ... base, 4222 ... collar part, 5223 ... low conductive member , 230, 3230, 5230 ... Holding member, 231 ... Circumferential expansion part, 3232 ... Axial expansion part, D ... Distance between permanent magnets (between poles)
Claims (15)
前記回転子は、円盤状の基台と、前記固定子と対向する前記基台の円盤面上に前記基台の周方向に沿って配置された複数の磁石と、前記複数の磁石の間にそれぞれ配置され前記複数の磁石を保持する複数の保持部と、を有し、
前記複数の磁石は、それぞれ、前記基台の径方向の外側に向かうにつれて周方向における長さが縮小する周方向縮小部を有し、
前記複数の保持部は、それぞれ、前記基台の径方向の外側に向かって前記基台の周方向における長さが拡大する周方向拡大部を有し、
前記複数の保持部のうち前記基台の周方向に並んで配置された2つの保持部の前記周方向拡大部が、それぞれ、前記複数の磁石のうち前記2つの保持部の間に配置された1つの磁石の前記周方向縮小部と接触していること
を特徴とするアキシャルギャップ型回転電機。 In an axial gap type rotary electric machine in which a stator and a rotor face each other through a gap provided along the central axis direction of the rotor.
The rotor is located between a disk-shaped base, a plurality of magnets arranged along the circumferential direction of the base on the disk surface of the base facing the stator, and the plurality of magnets. It has a plurality of holding portions, each of which is arranged and holds the plurality of magnets.
Each of the plurality of magnets has a circumferential reduction portion whose length in the circumferential direction decreases toward the outside in the radial direction of the base.
Each of the plurality of holding portions has a circumferential expansion portion whose length in the circumferential direction of the base increases toward the outside in the radial direction of the base.
The circumferential expansion portions of the two holding portions arranged side by side in the circumferential direction of the base among the plurality of holding portions are respectively arranged between the two holding portions of the plurality of magnets. An axial gap type rotary electric machine characterized in that it is in contact with the circumferential reduction portion of one magnet.
前記周方向拡大部と前記周方向縮小部が、テーパ形状であること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
The circumferential expansion portion and the circumferential reduction portion have a tapered shape.
Axial gap type rotary electric machine featuring.
前記周方向縮小部が、前記永久磁石における前記基台の径方向の外側に設けられ、
前記周方向拡大部が、前記保持部材における前記基台の径方向の外側に設けられていること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
The circumferential reduction portion is provided outside the radial direction of the base of the permanent magnet.
The circumferential expansion portion is provided outside the radial direction of the base in the holding member.
Axial gap type rotary electric machine featuring.
前記固定子には、コイルを巻回した複数のコアが環状に配列され、
前記複数のコアにおける前記回転子に対向する面の形状が、それぞれ、前記固定子の周方向における長さが前記固定子の径方向の外側に向かって大きくなる台形の台形部と、前記固定子の周方向における長さが前記台形の底辺と同一な辺を有する矩形部とを合わせた形状であること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
A plurality of cores around which a coil is wound are arranged in a ring shape on the stator.
The shape of the surface of the plurality of cores facing the rotor is a trapezoidal portion in which the length of the stator in the circumferential direction increases toward the outside in the radial direction of the stator, and the stator. The shape is a combination of the base of the trapezoid and the rectangular portion having the same side in the circumferential direction.
Axial gap type rotary electric machine featuring.
前記複数の保持部には、それぞれ、前記基台の軸方向において前記固定子側に向かって、前記基台の周方向における長さが拡大する軸方向拡大部が設けられ、
前記複数の磁石には、それぞれ、前記基台の軸方向において前記固定子側に向かって、前記基台の周方向おける長さが縮小する軸方向縮小部が設けられ、
前記複数の保持部のうち前記基台の周方向に並んで配置された2つの保持部の前記軸方向拡大部が、それぞれ、前記複数の磁石のうち前記2つの保持部の間に配置された1つの磁石の前記軸方向縮小部と接触していること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
Each of the plurality of holding portions is provided with an axially expanding portion in which the length in the circumferential direction of the base is increased toward the stator side in the axial direction of the base.
Each of the plurality of magnets is provided with an axial reduction portion in which the length in the circumferential direction of the base is reduced toward the stator side in the axial direction of the base.
The axially enlarged portions of the two holding portions arranged side by side in the circumferential direction of the base among the plurality of holding portions are respectively arranged between the two holding portions of the plurality of magnets. Being in contact with the axial reduction portion of one magnet,
Axial gap type rotary electric machine featuring.
前記軸方向拡大部と前記軸方向縮小部が、テーパ形状であること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 5.
The axial expansion portion and the axial reduction portion have a tapered shape.
Axial gap type rotary electric machine featuring.
前記保持部がモールド樹脂により成形されていること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
The holding part is molded with a molding resin,
Axial gap type rotary electric machine featuring.
前記保持部が前記磁石を覆っていること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 7.
That the holding portion covers the magnet.
Axial gap type rotary electric machine featuring.
前記保持部が保持部材により形成され、
前記保持部材を前記基台に固定させる固定構造を有する、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
The holding portion is formed by a holding member,
It has a fixing structure for fixing the holding member to the base.
Axial gap type rotary electric machine featuring.
前記基台の外周部から前記回転子の回転軸方向に沿って突出し、前記磁石の外周の少なくとも一部と接触する鍔部が前記基台に設けられていること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
A flange portion that protrudes from the outer peripheral portion of the base along the rotation axis direction of the rotor and comes into contact with at least a part of the outer circumference of the magnet is provided on the base.
Axial gap type rotary electric machine featuring.
前記保持部の外周の少なくとも一部と前記鍔部の内周の少なくとも一部が接触すること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 10.
At least a part of the outer circumference of the holding part and at least a part of the inner circumference of the collar part come into contact with each other.
Axial gap type rotary electric machine featuring.
前記基台より導電率の低い低導電部材が、前記基台と前記磁石の間に配置されていること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
A low conductivity member having a lower conductivity than the base is arranged between the base and the magnet.
Axial gap type rotary electric machine featuring.
前記複数の磁石と前記基台とが接触するそれぞれの面に、前記複数の磁石を前記基台に固定する固定構造が設けられていること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 1.
A fixing structure for fixing the plurality of magnets to the base is provided on each surface where the plurality of magnets come into contact with the base.
Axial gap type rotary electric machine featuring.
前記固定構造は、
前記複数の磁石のそれぞれに設けられた少なくとも1つの凸部と、前記基台に設けられ前記複数の凸部に嵌合される複数の凹部であること、
を特徴とするアキシャルギャップ型回転電機。 The axial gap type rotary electric machine according to claim 13.
The fixed structure
At least one convex portion provided on each of the plurality of magnets, and a plurality of concave portions provided on the base and fitted to the plurality of convex portions.
Axial gap type rotary electric machine featuring.
前記固定子の軸方向端面にギャップを介して対向する回転子と、を備え、
前記回転子が、基台と前記基台の前記固定子側端面に環状に配置された複数の磁石と、を有し、
前記磁石が、径方向外側に向かって周方向幅が拡大する周方向拡大部と、前記拡大部から径方向外側に向かって周方向幅が減少する周方向縮小部と、を有し
複数の前記磁石の間には、前記磁石の周方向側面と接触する保持部材を有するアキシャルギャップ型回転電機。 A stator formed by arranging a core and a coil wound around the core in an annular shape,
A rotor that faces the axial end face of the stator via a gap, is provided.
The rotor has a base and a plurality of magnets annularly arranged on the stator-side end face of the base.
The magnet has a plurality of peripherally expanding portions whose circumferential width expands toward the outside in the radial direction and a circumferentially contracting portion whose circumferential width decreases from the expanding portion toward the outward in the radial direction. An axial gap type rotary electric machine having a holding member in contact with the circumferential side surface of the magnet between the magnets.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019055915A JP7174658B2 (en) | 2019-03-25 | 2019-03-25 | Axial gap type rotary electric machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019055915A JP7174658B2 (en) | 2019-03-25 | 2019-03-25 | Axial gap type rotary electric machine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020162191A true JP2020162191A (en) | 2020-10-01 |
| JP2020162191A5 JP2020162191A5 (en) | 2021-11-25 |
| JP7174658B2 JP7174658B2 (en) | 2022-11-17 |
Family
ID=72640126
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019055915A Active JP7174658B2 (en) | 2019-03-25 | 2019-03-25 | Axial gap type rotary electric machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7174658B2 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102265178B1 (en) * | 2020-12-17 | 2021-06-16 | 세원이앤씨(주) | Rotor assembly and manufacturing method thereof |
| WO2022223798A1 (en) * | 2021-04-23 | 2022-10-27 | Yasa Limited | Rotor |
| WO2023010653A1 (en) * | 2021-08-05 | 2023-02-09 | 浙江盘毂动力科技有限公司 | Disk type electric motor rotor, forming method and double-air-gap electric motor rotor structure |
| DE102022108582A1 (en) | 2022-04-08 | 2023-10-12 | Avl Software And Functions Gmbh | Rotor for an axial flux machine, axial flux machine and method for assembling the rotor |
| DE102022116945A1 (en) | 2022-07-07 | 2024-01-18 | Bayerische Motoren Werke Aktiengesellschaft | Rotor for an axial flux machine, and method for producing a rotor |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02129177U (en) * | 1989-03-29 | 1990-10-24 | ||
| JP2007151321A (en) * | 2005-11-29 | 2007-06-14 | Nissan Motor Co Ltd | Rotor of rotary electric machine |
| JP2010142080A (en) * | 2008-12-15 | 2010-06-24 | Daikin Ind Ltd | Axial gap type rotary electric machine |
| JP2011188604A (en) * | 2010-03-08 | 2011-09-22 | Fujitsu General Ltd | Axial gap type electric motor |
| JP2015070738A (en) * | 2013-09-30 | 2015-04-13 | Dmg森精機株式会社 | Rotor, axial gap motor and method of manufacturing rotor |
| JP2015216715A (en) * | 2014-05-08 | 2015-12-03 | 株式会社日立製作所 | Axial gap type rotating electrical machine |
| JP2016131468A (en) * | 2015-01-15 | 2016-07-21 | 株式会社日立産機システム | Axial gap type rotary electric machine |
| JP2018110528A (en) * | 2014-04-14 | 2018-07-12 | 株式会社日立産機システム | Axial air gap type electric motor |
-
2019
- 2019-03-25 JP JP2019055915A patent/JP7174658B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02129177U (en) * | 1989-03-29 | 1990-10-24 | ||
| JP2007151321A (en) * | 2005-11-29 | 2007-06-14 | Nissan Motor Co Ltd | Rotor of rotary electric machine |
| JP2010142080A (en) * | 2008-12-15 | 2010-06-24 | Daikin Ind Ltd | Axial gap type rotary electric machine |
| JP2011188604A (en) * | 2010-03-08 | 2011-09-22 | Fujitsu General Ltd | Axial gap type electric motor |
| JP2015070738A (en) * | 2013-09-30 | 2015-04-13 | Dmg森精機株式会社 | Rotor, axial gap motor and method of manufacturing rotor |
| JP2018110528A (en) * | 2014-04-14 | 2018-07-12 | 株式会社日立産機システム | Axial air gap type electric motor |
| JP2015216715A (en) * | 2014-05-08 | 2015-12-03 | 株式会社日立製作所 | Axial gap type rotating electrical machine |
| JP2016131468A (en) * | 2015-01-15 | 2016-07-21 | 株式会社日立産機システム | Axial gap type rotary electric machine |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102265178B1 (en) * | 2020-12-17 | 2021-06-16 | 세원이앤씨(주) | Rotor assembly and manufacturing method thereof |
| WO2022223798A1 (en) * | 2021-04-23 | 2022-10-27 | Yasa Limited | Rotor |
| GB2609876A (en) * | 2021-04-23 | 2023-02-15 | Yasa Ltd | Rotor |
| WO2023010653A1 (en) * | 2021-08-05 | 2023-02-09 | 浙江盘毂动力科技有限公司 | Disk type electric motor rotor, forming method and double-air-gap electric motor rotor structure |
| DE102022108582A1 (en) | 2022-04-08 | 2023-10-12 | Avl Software And Functions Gmbh | Rotor for an axial flux machine, axial flux machine and method for assembling the rotor |
| DE102022116945A1 (en) | 2022-07-07 | 2024-01-18 | Bayerische Motoren Werke Aktiengesellschaft | Rotor for an axial flux machine, and method for producing a rotor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7174658B2 (en) | 2022-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020162191A (en) | Axial gap type rotary electric machine | |
| JP6055725B2 (en) | Axial type rotating electric machine using rotor and rotor | |
| CN109661760B (en) | Surface magnet type motor | |
| US10050480B2 (en) | Axial flux machine having a lightweight design | |
| JP5673640B2 (en) | Hybrid excitation type rotating electric machine | |
| JP5943063B2 (en) | Hybrid excitation type rotating electric machine | |
| JP5857799B2 (en) | Hybrid excitation type rotating electric machine | |
| JP6584331B2 (en) | Single-phase brushless motor and method for manufacturing single-phase brushless motor | |
| JP2019009986A (en) | Brushless motor and stator therefor | |
| JP2007074776A (en) | Rotating electric machine | |
| WO2015102106A1 (en) | Motor core and motor | |
| JP2007049884A (en) | Small dc motor | |
| JP2000041367A (en) | Hybrid excitation type synchronous machine | |
| JP2009044941A (en) | Axial motor core, stator and axial motor | |
| JP2020162191A5 (en) | ||
| JP2014100054A (en) | Transverse flux electric motor | |
| WO2019202768A1 (en) | Axial gap dynamo electrical machine | |
| JP2011072087A (en) | Axial gap motor | |
| JP2017204959A (en) | Dynamo-electric machine | |
| JP2010268650A (en) | Axial gap type rotating electrical machine | |
| JP2011109762A (en) | Unipolar motor | |
| JP6429400B2 (en) | Stator core, stator and rotating electric machine | |
| JP2012019605A (en) | Permanent magnet rotating electrical machine | |
| US9787153B2 (en) | Outer rotor type dynamo | |
| JP2006271142A (en) | Rotating machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211014 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211014 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220823 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7174658 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |