JP2020141288A - 情報処理装置、情報処理方法、及びプログラム - Google Patents
情報処理装置、情報処理方法、及びプログラム Download PDFInfo
- Publication number
- JP2020141288A JP2020141288A JP2019036157A JP2019036157A JP2020141288A JP 2020141288 A JP2020141288 A JP 2020141288A JP 2019036157 A JP2019036157 A JP 2019036157A JP 2019036157 A JP2019036157 A JP 2019036157A JP 2020141288 A JP2020141288 A JP 2020141288A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- condition
- region
- area
- information processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 41
- 238000003672 processing method Methods 0.000 title claims 3
- 238000001514 detection method Methods 0.000 claims abstract description 456
- 238000000034 method Methods 0.000 claims abstract description 72
- 230000008569 process Effects 0.000 claims abstract description 28
- 238000003384 imaging method Methods 0.000 claims description 41
- 238000004458 analytical method Methods 0.000 claims description 40
- 238000009826 distribution Methods 0.000 claims description 35
- 230000007613 environmental effect Effects 0.000 claims description 15
- 238000010586 diagram Methods 0.000 description 29
- 238000012545 processing Methods 0.000 description 29
- 230000005856 abnormality Effects 0.000 description 17
- 238000009434 installation Methods 0.000 description 12
- 206010000117 Abnormal behaviour Diseases 0.000 description 8
- 230000008859 change Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000004040 coloring Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 208000003443 Unconsciousness Diseases 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19678—User interface
- G08B13/1968—Interfaces for setting up or customising the system
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/42—Global feature extraction by analysis of the whole pattern, e.g. using frequency domain transformations or autocorrelation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
- G06V20/41—Higher-level, semantic clustering, classification or understanding of video scenes, e.g. detection, labelling or Markovian modelling of sport events or news items
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/103—Static body considered as a whole, e.g. static pedestrian or occupant recognition
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/02—Alarms for ensuring the safety of persons
- G08B21/04—Alarms for ensuring the safety of persons responsive to non-activity, e.g. of elderly persons
- G08B21/0438—Sensor means for detecting
- G08B21/0476—Cameras to detect unsafe condition, e.g. video cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/52—Elements optimising image sensor operation, e.g. for electromagnetic interference [EMI] protection or temperature control by heat transfer or cooling elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/62—Control of parameters via user interfaces
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/675—Focus control based on electronic image sensor signals comprising setting of focusing regions
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/183—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/07—Target detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/10—Recognition assisted with metadata
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19678—User interface
- G08B13/19691—Signalling events for better perception by user, e.g. indicating alarms by making display brighter, adding text, creating a sound
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
- H04N23/661—Transmitting camera control signals through networks, e.g. control via the Internet
Abstract
Description
まず、以下に説明する実施形態に共通する構成要素および処理フローの概要について、図1および図2を用いて説明する。ここで述べる構成要素および処理フローについては、後述する各実施形態において明示する、対応した機能ブロックおよび処理ステップによって発明の実施における実体を具体化するものとする。したがって、以下の説明は、図1および図2で述べる構成要素および処理フローを直ちに実施形態として実施するものとして説明することを意図したものではない。
撮影設定部102は、撮影部101が映像を撮影する撮影条件等の設定や変更を行う機能部である。撮影条件の詳細については後述する。撮影設定部102によって設定された撮影条件の情報は、領域決定部104に送られる。
次にS202において、領域決定部104は、撮影設定部102によって設定された各種撮影条件のうち、一つ以上の撮影条件に基づいて検出可能領域を決定する。
次にS203において、検出条件決定部106は、S201で特定された検出希望領域とS202で決定された検出可能領域とに基づいて、検出条件を決定する。
第1の実施形態における情報処理装置のシステム全体構成の一例を、図3を用いて説明する。
監視カメラ群301は複数の監視カメラからなり、各監視カメラはそれぞれ監視すべき場所に設置されており、それぞれ撮影している映像を送信する。それぞれの監視カメラは、目的の監視場所の映像を得るため、各々に適当な高さ、撮影方向、撮影角度となるように設置され、また撮影画角等についても設定される。
監視カメラ群301の各監視カメラ、後述するシステム管理サーバー303、解析サーバー304、録画サーバー305は、カメラネットワーク302によって接続されている。カメラネットワーク302は、例えばLANによって構成され、各カメラの映像を、システム管理サーバー303、解析サーバー304、録画サーバー305がそれぞれ取得できるよう接続する。
クライアントネットワーク307は、例えばLANによって構成されている。また、クライアントネットワーク307には、利用者の端末装置308も接続されている。
検出部402は、MPU等によって構成されている。検出部402は、入力された映像に含まれる検出対象の検出を行う。本実施形態では、検出対象として人物(人体)を挙げている。検出部402は、入力された映像から人物を検出し、さらに、その人物の異常な行動を検出可能となされている。異常行動の検出には、例えば参考文献1に開示されているような、局所性鋭敏型ハッシュ(LSH)によって正常行動からの乖離度合いを判定するなどの公知の手法を用いることができる。なお、検出部402は、先に説明した図1の機能ブロック図における検出部103に相当する。
検出領域は、検出部402が検出処理の対象とする映像中の領域で、検出希望条件になるべく適合するように定められる。検出部402は、検出条件に含まれる撮影条件で撮影された映像から、検出領域内に出現する検出対象を検出する処理を行う。
撮影管理部406は、MPU等によって構成されている。撮影管理部406は、撮影部401のそれぞれの監視カメラにおける現在の設置状況から定まる撮影条件を管理しており、また、解析サーバー304からのリクエストに応じて撮影条件の変更を行う。撮影管理部406が管理する撮影条件には、前述したような撮影部401の監視カメラの設置高さを含むカメラ設置位置、カメラアングル、カメラの各種設定パラメーターなどである。設定パラメーターには、監視カメラの撮影方向を定めるパン、チルトの角度や、拡大率(撮影倍率)を決定するズームの設定値などが含まれる。なお、撮影管理部406は、先に説明した図1の機能ブロック図における撮影設定部102に相当する。
記憶部408は、図3に示した録画サーバー305とストレージ306に相当する。記憶部408は、ハードディスクなどの記録メディアおよびMPU等を有して構成されている。記憶部408は、撮影部101が撮影した映像や、撮影管理部406が管理する撮影条件の設定情報などを保存する。また記憶部408は、撮影された映像と、その映像が撮影された際の撮影条件の設定情報との関係を表した情報、撮影日時の情報などのメタデータもあわせて保存する。
表示部409は、液晶画面等とそれを制御するMPU等によって構成されている。表示部409は、利用者に対し、撮影された映像や撮影条件の情報などの各種情報を提示し、また、利用者が操作を行う際のユーザーインターフェース(UI)画面を作成して表示する。
操作部410は、スイッチやタッチパネル等を有して構成され、利用者による操作を感知して情報処理装置に入力する。操作部410は、タッチパネルの代わりにマウスやトラックボールなど他のポインティングデバイスが用いられてもよい。
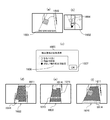
図5(a)は、撮影部401で撮影している映像を表示部409で表示している状態の画面例を示した図である。撮影部401の監視カメラは監視対象となされている場所を撮影するように設置されており、表示部409は画面上に監視カメラの現在のカメラ映像501を表示する。利用者は、その画面上の映像を見て、監視対象場所に異常が発生しないかをチェックしているとする。また、表示部409は、画面内に上面マップ502を合わせて表示し、上面マップ502にはカメラ位置および画角を表すアイコン503を合わせて表示する。これにより、利用者は、監視カメラによってカメラ映像501として現在撮影されている範囲を確認することができる。
図6(a)は、利用者によって検出希望条件が指定されて検出希望領域が特定される際に表示部409に表示される画面例を示した図である。本実施形態の場合、利用者による検出希望条件の指定は、表示部409の画面上の画像領域の指定などにより行われる。検出希望条件の指定方法としては、例えばカメラ映像501内の所望の画像領域を指示するなどの手法が考えられる。図6(a)の例では、利用者によって、カメラ映像501内で例えば廊下の一部の画像領域が検出希望条件として指示されたとする。このときの希望条件取得部404は、利用者により指定された画像領域と同じ特徴を有する領域を検出希望領域として特定する。図6(b)の例では、カメラ映像501内の廊下の一部の画像領域が検出希望条件として指定されたとする。希望条件取得部404は、利用者により指定された画像領域と同じ特徴を有する領域である、図6(a)の廊下全体の領域を、検出希望領域601として特定する。またこのときの表示部409は、カメラ映像501内で例えば所定の色付け等を行うことで、特定された検出希望領域601が利用者にわかるように表示する。
前述のようにして検出希望領域が特定されると、領域決定部403は、現在のカメラ設定によって検出対象を検出することが可能な検出可能領域を計算により求める。そして、表示部409は、その検出可能領域をカメラ映像501と上面マップ502に表示する。図6(b)の例では、カメラ映像501上に検出可能領域603が表示され、上面マップ502に検出可能領域604が表示された状態の一例を示している。なお、領域決定部403において検出可能領域を計算する方法については、後述の図7のフローチャートのS704で説明する。
図8(a)は、検出希望条件が指定される際の指定画面の一例を示した図である。図8(a)に示した検出希望条件指定画面には、設置された監視カメラからのカメラ映像801、上面マップ802、ツールボックス803、ボタン806,807,812等が表示される。
以上のようにして、利用者の指定の基づく検出希望領域の特定が行われた後、希望条件取得部404はその特定された検出希望領域の情報を記憶する。図7のフローチャートに説明を戻し、S702の後、情報処理装置の処理はS703に進む。
S703に進むと、検出条件決定部405は、撮影管理部406から現在の撮影条件S0を取得して、それを撮影条件Sとする。
そして、t<b、t<Uからtとrを消去してbについて解き整理すると、式(4)のようになる。すなわちこれは、カメラ映像で直線B上に立った人物の画像が検出可能となる条件である。

そして、S707に進むと、検出条件決定部405は、本フロー内で未だS705において検出領域R(H,S)の計算を行っていない、現在の撮影条件Sと異なる新たな撮影条件S'を選択する。そして、検出条件決定部405はテーブルの撮影条件S'に相当する設定のセルをチェックし、撮影管理部406はカメラ制御部407を介して撮影部401の状態を撮影条件S'に合わせて変更して、撮影条件S'を新たな撮影条件Sとする。S707の後、情報処理装置はS704の処理に戻る。
第1の実施形態では、監視カメラの撮影条件に基づいて検出対象の検出が可能な領域であるかどうかを推定する方法を説明した。しかしながら、例えば床面に複雑な凹凸があったり、照明条件のような環境条件の変化が激しい部分が同一の映像に含まれていたりすると、検出対象の検出が可能な領域かどうかの正確な推定が困難になる場合がある。また、照明条件が検出精度に寄与する場合には、これも含めて撮影条件として調整したいことがある。
図10(a)は、監視カメラにより撮影されたカメラ映像501と上面マップ502の表示例を示した図である。
第2の実施形態では、利用者によりカメラが設置されると、そのカメラによって例えば1日分の撮影が行われて解析用の映像の収集が行われる。なお、解析用映像の撮影中は、図10(a)のようにカメラ映像の監視は行えるが、未だ検出処理は動作していない。また解析映像の収集中は、撮影条件の設定を順次変動させるようにした撮影が行われる。
図11のS701、S702は、図7に示した第1の実施形態と同様の処理ステップであるが、第2の実施形態の場合、S701において、撮影管理部406は、撮影場所の照明の状態と窓のブラインドの状態などの証明条件も、撮影条件に含めて取得する。S702の次はS1103の処理に進む。
次にS1104において、検出条件決定部405は、S1103で撮影して記録された解析用の映像について人体検出を行う。
次にS1105において、検出条件決定部405は、S1104で解析用の映像から検出した人物についての情報を、記憶部408に記録する。この時、記録する情報には、カメラ映像内における人物の位置とサイズの情報を含む。また記録された情報は、現在の撮影条件ごとに分けて記録され、後に別の撮影条件でS1105の処理が実行された際に混合しないようにする。
図12は、第2の実施形態において領域決定部403で行われる検出可能領域の決定方法を説明するための図である。
S1109に進むと、検出条件決定部405は、S1105で記録した撮影条件Sのそれぞれについて検出可能領域DS(T)を求めて、検出希望領域との共通部分から検出領域を決定する。そして、検出条件決定部405は、上面マップでの面積が最も大きくなる領域を選択して、表示部409に表示させる。
なお、検出可能領域を表示部409に表示する際は、検出可能領域DS(T)そのものを示す他に、検出可能性分布DSを例えば色の濃淡や色相によって変化させてヒートマップとして表示してもよい。
以上説明したように、第2の実施形態によれば、予め撮影して収集した解析映像を用いた統計的な情報から検出可能領域を推定して検出領域の決定を行うことができる。
第1、第2の実施形態では、単一の監視カメラについて好適な検出条件を選ぶ方法を説明した。しかしながら、複数の監視カメラを連携して運用する場合には、監視カメラシステム全体の組み合わせとして好適になるように検出条件を設定することが望ましい。第3の実施形態では、複数の監視カメラを連携して運用する監視カメラシステムにおいて、システム全体の組み合わせとして好適になる検出条件を設定可能とする方法を説明する。なお、ここでは第1の実施形態に対して追加または変更される部分について説明し、共通部分については説明を省略する。またここでは第1の実施形態を元にして説明するが、第2の実施形態についても同様に第3の実施形態の処理は適用可能である。なお、以下の説明では2つの監視カメラを連携して運用する例を挙げるが、監視カメラが3つ以上である場合も同様の処理を行うことができる。
第3の実施形態のフローは基本的に図7のフローと同様であるが、第3の実施形態の場合は、S709で用いる撮影条件Sを、複数の監視カメラの組み合わせに拡張することで対応する。
図14(a)〜図14(d)には、第3の実施形態において撮影条件として使用する項目と、各撮影条件に対応した値の範囲とのリスト1401〜1404の例を示している。
なお、重点撮影ポイントは複数指定されてもよく、その場合、領域決定部403は、検出領域がすべての重点撮影ポイントを含むように撮影条件を探索する。
また、第3の実施形態において、すべての重点撮影ポイントを含むような撮影条件が得られなかった場合には、前述の実施形態のS710と同じような警告が行われてもよい。
第3の実施形態によれば、以上のようにすることで、複数の監視カメラを利用した際にも全体として好適な検出条件を決定することができる。
第1から第3の実施形態では、異常な行動をとった人物の検出という1種類の特性の検出を行うシステムを例に挙げて説明した。しかしながら、検出したい特性が複数あって、複数の検出方法を用いたい場合がある。このとき、それぞれの検出方法について、検出処理の特性の違いによって、検出可能領域が異なることが一般的であり、したがって全体として適切な検出条件を設定する必要がある。
そこで第4の実施形態では、複数の検出方法を備えたシステムにおいて、それぞれ異なる検出可能領域を同時に調整する方法を説明する。
図15は、第2の実施形態の図10(c)で説明した検出条件設定画面を、2種類の検出方法を持つ第4の実施形態において拡張した例を示した図である。図15において図10(c)と同じ参照符号が付された要素は、第2の実施形態で説明したものと同じ機能を持ち、それらの説明は省略し、以下、第4の実施形態で追加された部分について説明する。
また第4の実施形態の場合、検出領域1006は、それら合併された分布から定まる検出可能領域と、検出希望領域1005とから決定される。
第4の実施形態の場合、S1104において、検出条件決定部405は、人体検出に加えて顔検出を行い、S1105において、顔についての情報を合わせて記録する。
また第4の実施形態の場合、S1110において、操作部410を介した図15のスライドバー1504や1505からの入力により、各検出方法に対する重みを利用者が合わせて指定できるようにする。
第1から第4の実施形態では、利用者が、検出希望条件を検出希望領域として具体的に指定できるシステムの例を挙げた。しかしながら、利用者にとっては、具体的な検出希望領域を指定することがしばしば難しい場合がある。第5の実施形態では、撮影箇所の環境情報に基づき、より柔軟な形で利用者が検出希望条件を指定できるようにする方法を説明する。
図16(a)に示した個所1601や、同じく図16(b)に示した個所1602は、路面上に凹凸がある箇所を表しているとする。また図16(a)に示した領域1603や、図16(b)に示した領域1604は、それぞれドアの前の領域を示している。個所1601,1602に示した凸凹個所は例えば人がつまずきやすい箇所であり、領域1603,1604のドアの前領域は例えば人が出合い頭に衝突する可能性ある領域である。このような場合、利用者が、それら個所1601,1602や領域1603,1604について、注意領域として検出できるような設定を行いたくなると想定される。ただし、具体的に異常の可能性が高そうな箇所などを前もって予測し、それらを注意領域として指定することは必ずしも容易でない。例えば個所1601の凹凸はカメラ映像では視認し難い場合があり、例えば領域1603のドアの前領域で特に強調する情報がない場合は衝突の可能性に利用者が注意を向けないことがありうる。
検出条件決定部405は、最初に撮影環境における環境情報を収集する。環境情報は、上面マップの建物見取り図や設計図、周辺地図などの情報、カメラ映像からの物体認識の結果、カメラに搭載された測距装置やGPSなどの位置情報を含む。そして、検出条件決定部405は、これらの環境情報と、利用者からの検出希望条件とに基づいて、注意箇所を検出する。
ここで、ラジオボタン1606のなかで、例えば「なるべく広く」のボタンが選択された場合、検出条件決定部405は、検出領域を広くするような検出条件を、第1の実施形態と同様の処理により設定する。また例えば「路面の段差」のボタンが選択された場合、検出条件決定部405は、環境情報に含まれる上面マップから段差のある領域を注意箇所として登録し、検出可能領域が注意箇所を含むことを条件として検出領域を決定する。また例えば、「出会い頭の衝突可能性」のボタンが選択された場合、検出条件決定部405は、環境情報に含まれるドアについて、ドアに面する領域を注意箇所として登録し、検出可能領域が注意箇所を含むことを条件として検出領域を決定する。検出条件決定部405は、これらいずれの場合も注意箇所が複数検出された場合には、それら注意箇所を含むように検出領域を決定する。
本発明は、前述の各実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
前述の実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。即ち、本発明は、その技術思想、又はその主要な特徴から逸脱することなく、様々な形で実施することができる。
Claims (18)
- 撮影装置が映像を撮影する際の撮影条件を設定する設定手段と、
前記撮影条件に基づいて、映像内で検出対象を検出可能な検出可能領域を決定する領域決定手段と、
利用者が検出対象の検出を希望する検出希望条件を取得する取得手段と、
前記検出希望条件と、少なくとも一つの撮影条件に基づいて決定された前記検出可能領域とに基づいて、前記映像から前記検出対象を検出する検出条件を決定する条件決定手段と、
を有することを特徴とする情報処理装置。 - 入力された映像から、前記検出条件に基づいて検出対象を検出する検出手段をさらに有することを特徴とする請求項1に記載の情報処理装置。
- 前記取得手段は、利用者が前記検出対象の検出を希望する検出希望領域を含む前記検出希望条件を取得することを特徴とする請求項1または2に記載の情報処理装置。
- 前記検出条件には前記検出を実行する映像中の領域である検出領域が含まれることを特徴とする請求項1から3のいずれか1項に記載の情報処理装置。
- 前記検出可能領域と、前記検出希望条件と、前記検出条件とのうち、少なくとも一つを表示する表示手段をさらに有することを特徴とする請求項1から4のいずれか1項に記載の情報処理装置。
- 前記撮影条件は前記撮影装置の撮影方向を含み、
前記領域決定手段は、前記撮影方向に基づいて、前記検出可能領域を決定することを特徴とする請求項1から5のいずれか1項に記載の情報処理装置。 - 前記設定手段は、前記撮影条件として所定の条件の集合を設定し、
前記領域決定手段は、前記所定の条件の集合のそれぞれについて前記検出可能領域を決定し、
前記条件決定手段は、前記検出可能領域のそれぞれによって決定される検出条件から少なくとも一つの検出条件を選択して決定することを特徴とする請求項1から6のいずれか1項に記載の情報処理装置。 - 前記条件決定手段は、前記検出希望条件に適合する前記検出可能領域の部分の面積に基づいて前記検出条件を選択することを特徴とする請求項7に記載の情報処理装置。
- 前記領域決定手段は、前記撮影装置により予め撮影された解析用の映像を解析した結果に基づいて前記検出可能領域を決定することを特徴とする請求項1から8のいずれか1項に記載の情報処理装置。
- 前記領域決定手段は、前記解析用の映像に基づいて、出現する検出対象の分布を推定し、前記分布に基づいて前記検出可能領域を決定することを特徴とする請求項9に記載の情報処理装置。
- 前記解析用の映像は、前記設定手段により設定された複数の異なる撮影条件ごとに撮影された映像であることを特徴とする請求項9または10に記載の情報処理装置。
- 前記領域決定手段は、前記撮影装置により撮影された複数の映像について、複数の検出可能領域の決定を行い、
前記条件決定手段は、前記複数の検出可能領域に基づいて前記検出条件を決定することを特徴とする請求項1から11のいずれか1項に記載の情報処理装置。 - 前記領域決定手段は、前記撮影装置により撮影された複数の映像のうち、利用者から指定された重点撮影ポイントを含む映像を基に、前記検出可能領域を決定することを特徴とする請求項12に記載の情報処理装置。
- 前記領域決定手段は、複数の前記検出対象についてそれぞれ前記検出可能領域を決定し、
前記条件決定手段は、前記複数の検出対象について決定された前記検出可能領域に基づいて検出条件を決定することを特徴とする請求項1から13のいずれか1項に記載の情報処理装置。 - 前記条件決定手段は、前記複数の検出対象について決定された複数の前記検出可能領域について、利用者からの指定に応じた優先度を設定して前記検出条件を決定することを特徴とする請求項14に記載の情報処理装置。
- 前記取得手段は、環境情報に基づく注意箇所を検出領域に含む前記検出希望条件を取得することを特徴とする請求項1から15のいずれか1項に記載の情報処理装置。
- 情報処理装置が実行する情報処理方法であって、
撮影装置が映像を撮影する際の撮影条件を設定する設定工程と、
前記撮影条件に基づいて、前記映像から検出対象を検出可能な検出可能領域を決定する領域決定工程と、
利用者が前記検出対象の検出を希望する検出希望条件を取得する取得工程と、
前記検出希望条件と、少なくとも一つの撮影条件に基づいて決定された前記検出可能領域とに基づいて、前記映像から前記検出対象を検出する検出条件を決定する条件決定工程と、
を有することを特徴とする情報処理方法。 - コンピュータを、請求項1から16のいずれか1項に記載の情報処理装置の各手段として機能させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019036157A JP2020141288A (ja) | 2019-02-28 | 2019-02-28 | 情報処理装置、情報処理方法、及びプログラム |
| US16/799,659 US11533424B2 (en) | 2019-02-28 | 2020-02-24 | Information processing apparatus for performing setting of monitoring camera and method of the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019036157A JP2020141288A (ja) | 2019-02-28 | 2019-02-28 | 情報処理装置、情報処理方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020141288A true JP2020141288A (ja) | 2020-09-03 |
| JP2020141288A5 JP2020141288A5 (ja) | 2022-03-02 |
Family
ID=72236401
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019036157A Pending JP2020141288A (ja) | 2019-02-28 | 2019-02-28 | 情報処理装置、情報処理方法、及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11533424B2 (ja) |
| JP (1) | JP2020141288A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021145071A1 (ja) * | 2020-01-14 | 2021-07-22 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、プログラム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11849209B2 (en) * | 2021-12-01 | 2023-12-19 | Comoto Holdings, Inc. | Dynamically operating a camera based on a location of the camera |
| EP4297393A1 (en) * | 2022-06-21 | 2023-12-27 | Nokia Technologies Oy | Object-dependent image illumination |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008098858A (ja) * | 2006-10-10 | 2008-04-24 | Auto Network Gijutsu Kenkyusho:Kk | 車両周辺監視装置 |
| JP2013218571A (ja) * | 2012-04-10 | 2013-10-24 | Toyota Motor Corp | 画像認識装置および運転支援装置 |
| JP2014116912A (ja) * | 2012-12-12 | 2014-06-26 | Canon Inc | 画像処理装置、画像処理装置の制御方法およびプログラム |
| JP2016220145A (ja) * | 2015-05-25 | 2016-12-22 | キヤノン株式会社 | 画像解析装置、画像解析方法、およびプログラム |
| JP2017073670A (ja) * | 2015-10-07 | 2017-04-13 | キヤノン株式会社 | 画像処理装置、画像処理方法および画像処理システム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE602006009191D1 (de) * | 2005-07-26 | 2009-10-29 | Canon Kk | Bildaufnahmegerät und -verfahren |
| WO2007067721A2 (en) * | 2005-12-08 | 2007-06-14 | Lenel Systems International, Inc. | System and method for counting people near objects |
| JP5422859B2 (ja) | 2010-03-31 | 2014-02-19 | 株式会社日立製作所 | 監視装置および不審行動検出方法 |
| JP5925068B2 (ja) * | 2012-06-22 | 2016-05-25 | キヤノン株式会社 | 映像処理装置、映像処理方法、およびプログラム |
| JP6524910B2 (ja) * | 2013-10-01 | 2019-06-05 | 日本電気株式会社 | 物体検出装置、物体検出方法および学習装置 |
| US11019251B2 (en) * | 2017-01-30 | 2021-05-25 | Canon Kabushiki Kaisha | Information processing apparatus, image capturing apparatus, information processing method, and recording medium storing program |
-
2019
- 2019-02-28 JP JP2019036157A patent/JP2020141288A/ja active Pending
-
2020
- 2020-02-24 US US16/799,659 patent/US11533424B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008098858A (ja) * | 2006-10-10 | 2008-04-24 | Auto Network Gijutsu Kenkyusho:Kk | 車両周辺監視装置 |
| JP2013218571A (ja) * | 2012-04-10 | 2013-10-24 | Toyota Motor Corp | 画像認識装置および運転支援装置 |
| JP2014116912A (ja) * | 2012-12-12 | 2014-06-26 | Canon Inc | 画像処理装置、画像処理装置の制御方法およびプログラム |
| JP2016220145A (ja) * | 2015-05-25 | 2016-12-22 | キヤノン株式会社 | 画像解析装置、画像解析方法、およびプログラム |
| JP2017073670A (ja) * | 2015-10-07 | 2017-04-13 | キヤノン株式会社 | 画像処理装置、画像処理方法および画像処理システム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021145071A1 (ja) * | 2020-01-14 | 2021-07-22 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US11533424B2 (en) | 2022-12-20 |
| US20200280683A1 (en) | 2020-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10796543B2 (en) | Display control apparatus, display control method, camera system, control method for camera system, and storage medium | |
| JP5617100B2 (ja) | センサ統合システム及びセンサ統合方法 | |
| JP2020141288A (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| RU2484531C2 (ru) | Устройство обработки видеоинформации системы охранной сигнализации | |
| RU2561925C2 (ru) | Способ определения оптимальной конфигурации системы видеомониторинга леса | |
| US9241138B2 (en) | Image monitoring apparatus, image monitoring system, and image monitoring system configuration method | |
| US10404947B2 (en) | Information processing apparatus, information processing method, camera system, control method for camera system, and storage medium | |
| JP7085812B2 (ja) | 画像処理装置およびその制御方法 | |
| JP2008040781A (ja) | 被写体照合装置および被写体照合方法 | |
| US20220171068A1 (en) | Damage detection and analysis using three-dimensional surface scans | |
| CN116092018B (zh) | 一种基于智慧建筑的消防隐患监测方法及系统 | |
| US20020052708A1 (en) | Optimal image capture | |
| KR20130141159A (ko) | 불법 주정차 단속 방법 및 시스템 | |
| JP2005086626A (ja) | 広域監視装置 | |
| JP2017207872A (ja) | センサ設置位置支援装置 | |
| KR101840042B1 (ko) | 복합 가상 팬스 라인 설정 방법 및 이를 이용한 침입 감지 시스템 | |
| JP2021185663A (ja) | 映像監視装置、映像監視方法及びプログラム | |
| JP7146416B2 (ja) | 情報処理装置、情報処理システム、情報処理方法、及びプログラム | |
| JP2003109001A (ja) | 人物検出システム、及び人物検出プログラム | |
| KR101937582B1 (ko) | 인도 보안 안전 시스템 | |
| JP2013134186A (ja) | カメラパラメータ測定装置、カメラパラメータ測定方法、及びプログラム | |
| CN112866631B (zh) | 一种区域确定方法、系统、装置及电子设备 | |
| JP2016116137A (ja) | 画像処理装置、画像処理方法、及び、プログラム | |
| JP2017028688A (ja) | 画像管理装置、画像管理方法及びプログラム | |
| KR101886856B1 (ko) | 이종센서 탐색기의 비정형 객체추적에 대한 데이터 결합시스템 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230712 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20231003 |