JP2019520915A - 脊椎外傷の矯正および固定 - Google Patents
脊椎外傷の矯正および固定 Download PDFInfo
- Publication number
- JP2019520915A JP2019520915A JP2018568927A JP2018568927A JP2019520915A JP 2019520915 A JP2019520915 A JP 2019520915A JP 2018568927 A JP2018568927 A JP 2018568927A JP 2018568927 A JP2018568927 A JP 2018568927A JP 2019520915 A JP2019520915 A JP 2019520915A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- rack
- lock
- guide
- pivot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7074—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling
- A61B17/7076—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling for driving, positioning or assembling spinal clamps or bone anchors specially adapted for spinal fixation
- A61B17/7077—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling for driving, positioning or assembling spinal clamps or bone anchors specially adapted for spinal fixation for moving bone anchors attached to vertebrae, thereby displacing the vertebrae
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7074—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling
- A61B17/7076—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling for driving, positioning or assembling spinal clamps or bone anchors specially adapted for spinal fixation
- A61B17/7077—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling for driving, positioning or assembling spinal clamps or bone anchors specially adapted for spinal fixation for moving bone anchors attached to vertebrae, thereby displacing the vertebrae
- A61B17/7079—Tools requiring anchors to be already mounted on an implanted longitudinal or transverse element, e.g. where said element guides the anchor motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00407—Ratchet means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B2017/564—Methods for bone or joint treatment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B2017/681—Alignment, compression, or distraction mechanisms
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Neurology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
Abstract
Description
本出願は、参照によりその全体が本明細書に組み込まれる、2016年7月1日に出願された米国特許出願第62/357,941号の出願日の利益を引用する。
Claims (153)
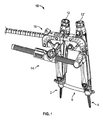
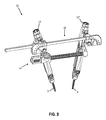
- 脊椎外傷を矯正するためのシステムであって、前記システムは:
第1および第2の骨アンカーアセンブリにそれぞれ固定して取り付けるように構成された第1および第2のガイド部材であって、前記第1および前記第2のガイド部材のそれぞれは近位端部および遠位端部を有する、第1および第2のガイド部材と;
前記第1および前記第2のガイド部材に接続されて、前記第1および前記第2のガイド部材の前記遠位端部それぞれにおけるそれぞれ1つの軸の周りに前記第1および前記第2のガイド部材が互いに対して回転することを可能にするピボットラックと;
前記第1および前記第2のガイド部材に接続されるロックラックであって、前記ガイド部材が少なくとも一方向に互いに対して回転するのを可逆的に防止するように構成される、ロックラックと;
第1および第2の骨アンカーアセンブリであって、前記第1および前記第2のガイド部材のそれぞれの前記遠位端部に接続されて、前記ガイド部材に対する前記骨アンカーアセンブリの並進および少なくとも1つの軸の周りの角形成を制限する、第1および第2の骨アンカーアセンブリと;を有する、
システム。 - 前記ピボットラックは、前記第1および前記第2のガイド部材の前記遠位端部を、互いに向かって又は互いに離れる方に並進させる並進ユニットを有する、
請求項1に記載のシステム。 - 前記ピボットラックは、前記第1および前記第2のガイド部材が、それぞれの前記ガイド部材の長手方向軸に略垂直であり且つそれぞれの前記骨アンカーアセンブリに据え付けられたときに脊椎ロッドに略垂直であるそれぞれの1つの軸の周りに互いに対して回転することを可能にする、
請求項1又は2に記載のシステム。 - 前記ピボットラックは、第1および第2のアームユニットを有し、それぞれの前記第1および前記第2のアームユニットは:前記第1および前記第2のガイド部材のそれぞれの前記遠位端部に取り付けるように構成された遠位取り付け要素であって、前記第1および前記第2のアームユニットは前記ガイド部材に対して並進することを制限される、遠位取り付け要素と;近位係合機構と、を有する、
請求項1乃至3のいずれか1項に記載のシステム。 - 前記ピボットラックは:前記第1のアームユニットに固定して接続される第1のピボットアームアセンブリと、第1の端部および第2の端部を有する細長いピボットラック部材であって、前記第1のピボットアームアセンブリは前記第1の端部に固定して取り付けられる、細長いピボットラック部材と、前記細長いピボットラック部材に並進可能に取り付けられるとともに、前記第2のアームユニットに固定して接続される、第2のピボットアームアセンブリと、を有する、
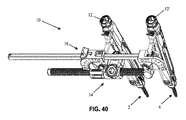
請求項1乃至4のいずれか1項に記載のシステム。 - 二重ドライバおよびてこ器具であって:ハンドルと;前記ハンドルに固定されるシャフトと;前記ハンドルと反対側の端部で前記シャフトに固定される駆動係合機構と;を有し、前記シャフトは前記ガイド部材の管腔内に収まり、前記駆動係合機構は、前記ピボットラック上でロックピンを駆動するように構成される、二重ドライバおよびてこ器具をさらに有する、
請求項1乃至5のいずれか1項に記載のシステム。 - 前記器具は、ロック構成およびロック解除構成を有し、前記ロック解除構成では、前記ハンドルは、前記シャフトに垂直な軸の周りに前記シャフトに対して回転することができ、前記ロック構成では、前記ハンドルは、前記シャフトに垂直な前記軸の周りに前記シャフトに対して回転することを妨げられる、
請求項6に記載のシステム。 - 前記ロックラックは、
細長いロックラック部材と、
前記細長いロックラック部材に接続された第1のコネクタアームアセンブリであって、前記第1のガイド部材に取り付けるように構成された第1のコネクタアームを有し、前記第1のコネクタアームが前記第1のコネクタアームアセンブリに対して第1の軸の周りに回転することを可能にするとともに、前記第1のコネクタアームが前記第1のコネクタアームアセンブリに対して前記第1の軸に沿って並進することを可能にするように構成される、第1のコネクタアームアセンブリと、
前記細長いロックラック部材にスライド可能に接続される第2のコネクタアームアセンブリであって、前記第2のガイド部材に取り付けるように構成された第2のコネクタアームを有し、前記第2のコネクタアームが前記第2のコネクタアームアセンブリに対して第2の軸の周りに回転することを可能にするとともに、前記第2のコネクタアームが前記第2のコネクタアームアセンブリに対して前記第2の軸に沿って並進することを可能にするように構成される、第2のコネクタアームアセンブリと、
少なくとも一方向において前記細長いロックラック部材に沿って摺動することに対して前記第2のコネクタアームアセンブリを可逆的にロックする、ロック機構と、
を有する、
請求項1乃至7のいずれか1項に記載のシステム。 - 脊椎外傷を矯正するためのシステムであって、前記システムは:
ピボットラックであって、
各第1および第2のアームユニットが:
第1および第2のガイド部材の遠位端部それぞれにおける1つの軸の周りに前記第1および前記第2のガイド部材が互いに対して回転することを可能にするように前記第1および前記第2のガイド部材それぞれに取り付けるように構成された遠位取り付け要素であって、前記第1および前記第2のアームユニットは前記ガイド部材に対して並進することを制限される、遠位取り付け要素;並びに、
近位係合機構;を有する、
第1および第2のアームユニットと、
前記第1のアームユニットに固定して接続される第1のピボットアームアセンブリと、
第1の端部および第2の端部を有する細長いピボットラック部材であって、前記第1のピボットアームアセンブリは前記第1の端部に固定して取り付けられる、細長いピボットラック部材と、
前記細長いピボットラック部材に並進可能に取り付けられるとともに、前記第2のアームユニットに固定して接続される、第2のピボットアームアセンブリと、を有する、
ピボットラック;並びに
前記ガイド部材の相対距離を維持するロックラックであって、前記ロックラックは、
細長いロックラック部材と、
前記細長いロックラック部材に接続される第1のコネクタアームアセンブリであって、前記第1のガイド部材に取り付けるように構成された第1のコネクタアームを有し、前記第1のコネクタアームアセンブリは、前記第1のコネクタアームが前記第1のコネクタアームアセンブリに対して第1の軸の周りに回転することを可能にするように構成され、前記第1のコネクタアームアセンブリは、前記第1のコネクタアームが前記第1のコネクタアームアセンブリに対して前記第1の軸に沿って並進することを可能にするように構成される、第1のコネクタアームアセンブリと、
前記細長いロックラック部材にスライド可能に接続される第2のコネクタアームアセンブリであって、前記第2のガイド部材に取り付けるように構成された第2のコネクタアームを有し、前記第2のコネクタアームアセンブリは、前記第2のコネクタアームが前記第2のコネクタアームアセンブリに対して第2の軸の周りに回転することを可能にするように構成され、前記第2のコネクタアームアセンブリは、前記第2のコネクタアームが前記第2のコネクタアームアセンブリに対して前記第2の軸に沿って並進することを可能にするように構成される、第2のコネクタアームアセンブリと、
少なくとも一方向において前記細長いロックラック部材に対して摺動することに対して前記第2のコネクタアームアセンブリを可逆的にロックする、ロック機構と、を有する、
ロックラック、
を有する、
システム。 - 第1および第2の骨アンカーアセンブリにそれぞれ固定して取り付けるように構成された第1および第2のアンカーガイド部材を有し、前記第1および前記第2のガイド部材のそれぞれは近位端部および遠位端部を有し、
前記ロックラックは、前記第1および前記第2のガイド部材に接続されるとともに、少なくとも一方向において前記ガイド部材が互いに対して回転することを可逆的に防ぐように構成される、
請求項9に記載のシステム。 - 前記第1および前記第2の骨アンカーアセンブリは、前記第1および前記第2のガイド部材の前記遠位端部に接続されて、前記ガイド部材に対する少なくとも1つの軸の周りの前記骨アンカーアセンブリの前記並進および角形成を制限する、
請求項10に記載のシステム。 - 前記遠位取り付け要素は、前記第1および前記第2のガイド部材が、前記ガイド部材の長手方向軸に略垂直であり且つ前記骨アンカーアセンブリに据え付けられた脊椎ロッドの方向に略垂直である軸の周りに互いに対して回転することを可能にする、
請求項11に記載のシステム。 - 二重ドライバおよびてこ器具であって:ハンドルと;前記ハンドルに固定されるシャフトと;前記ハンドルと反対側の端部で前記シャフトに固定される駆動係合機構と;を有し、前記シャフトは前記ガイド部材の管腔内に収まり、前記駆動係合機構は、前記ピボットラック上でロックピンを駆動するように構成される、二重ドライバおよびてこ器具をさらに有する、
請求項9乃至11のいずれか1項に記載のシステム。 - 前記器具は、ロック構成およびロック解除構成を有し、前記ロック解除構成では、前記ハンドルは、前記シャフトに垂直な軸の周りに前記シャフトに対して回転することができ、前記ロック構成では、前記ハンドルは、前記シャフトに垂直な前記軸の周りに前記シャフトに対して回転することを妨げられる、
請求項13に記載のシステム。 - 患者の脊椎外傷を修復する方法であって、前記方法は:
第1の骨アンカーアセンブリを第1の椎骨構造に固定するステップと;
第2の骨アンカーアセンブリを第2の椎骨構造に固定するステップと;
第1のガイド部材を前記第1の骨アンカーアセンブリに固定して接続するステップであって、前記第1のガイド部材は遠位端部および近位端部を有する、ステップと;
第2のガイド部材を前記第2の骨アンカーアセンブリに固定して接続するステップであって、前記第2のガイド部材は遠位端部および近位端部を有する、ステップと;
ピボットラックを前記第1および前記第2のガイド部材の両方に接続するステップであって、前記ピボットラックは、前記第1および前記第2のガイド部材がそれぞれ第1および第2の軸の周りで互いに対して回転することを可能にするように構成され、前記第1の軸および前記第2の軸はそれぞれの前記第1および前記第2のガイド部材の前記遠位端部を通過し、前記第1および前記第2のガイド部材の前記遠位端部の互いに対する並進を制御する並進ユニットを有する、ステップと;
ロックラックを前記第1および前記第2のガイド部材の両方に接続するステップであって、前記ロックラックは、前記ガイド部材が少なくとも一方向において互いに対して回転するのを可逆的に防止するように構成される、ステップと;
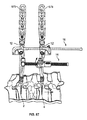
角形成、伸延、および圧縮のうちの少なくとも1つによって前記第1および前記第2の椎骨構造の整列を矯正するステップであって、
前記角形成は、前記第1および前記第2の椎骨構造の角形成を生じさせるように、前記第1および前記第2の軸それぞれの周りに前記第1および前記第2のガイド部材を互いに対して回転させることを含み、
前記伸延および前記圧縮は、前記第1および前記第2のガイド部材の前記遠位端部を互いに対して並進させることを含む、
ステップと;
前記角形成、前記伸延、および前記圧縮の前記少なくとも1つを維持するように前記第1および前記第2の骨アンカーアセンブリ内に脊椎ロッドを固定して据え付けるステップと;を含む、
方法。 - 前記脊椎外傷は破裂骨折であり、前記第1および前記第2の椎骨構造の整列を矯正するステップは:前記第1のガイド部材の長手方向軸と前記第2のガイド部材の長手付後軸の近位交差角度が増加するように前記第1および前記第2のガイド部材を回転させるステップと;前記第1および前記第2のガイド部材の前記遠位端部を互いに離れるように並進させることによって前記椎骨構造を伸延するステップと;を含む、
請求項15に記載の方法。 - 前記脊椎外傷はチャンス骨折であり、前記第1および前記第2の椎骨構造の整列を矯正するステップは:前記第1のガイド部材の長手方向軸と前記第2のガイド部材の長手付後軸の近位交差角度が増加するように前記第1および前記第2のガイド部材を回転させるステップと;前記第1および前記第2のガイド部材の前記遠位端部を互いに向かって並進させることによって前記椎骨構造を圧縮するステップと;を含む、
請求項15に記載の方法。 - 前記脊椎外傷は脱臼骨折であり、前記第1および前記第2の椎骨構造の整列を矯正するステップは:前記第1のガイド部材の長手方向軸と前記第2のガイド部材の長手付後軸の近位交差角度が増加するように前記第1および前記第2のガイド部材を回転させるステップと;前記第1および前記第2のガイド部材の前記遠位端部を互いに向かって並進させることによって前記椎骨構造を圧縮するステップと;を含む、
請求項15に記載の方法。 - 前記第1および前記第2のガイド部材を互いに対して回転するためのてこ作用を提供するために前記第1および前記第2のガイド部材の少なくとも1つに二重ドライバおよびてこ器具を挿入するステップと;
前記二重ドライバおよびてこ器具により前記ピボットラックの少なくとも1つのアームユニットを締めるステップと;を含む、
請求項15乃至18のいずれか1項に記載の方法。 - 前記二重ドライバおよびてこ器具は、ハンドルと、前記ハンドルに固定されるシャフトと、前記シャフトの他方の端部で接続される駆動係合機構と、を含み、前記方法は、前記第1および前記第2のガイド部材を互いに対して回転するためのてこ作用を提供するために前記シャフトに対して前記ハンドルに角度を付けるステップを含む、
請求項19に記載の方法。 - 前記第1および前記第2の椎骨構造は、損傷した椎骨構造に隣接する隣接していない椎骨上にある、
請求項15に記載の方法。 - 前記第1および前記第2の椎骨構造は、椎弓根である、
請求項15に記載の方法。 - 前記第1および前記第2の細長いガイド部材は、前記骨アンカーアセンブリをそれぞれの前記椎骨構造に固定する前に、それぞれの前記骨アンカーアセンブリに固定して取り付けられる、
請求項15に記載の方法。 - それぞれの前記骨アンカーアセンブリは、別々の切開部を通って挿入される、
請求項15乃至23のいずれか1項に記載の方法。 - それぞれの前記骨アンカーアセンブリは、幅より深い別々の切開部を通って挿入される、
請求項15乃至24のいずれか1項に記載の方法。 - それぞれの前記骨アンカーアセンブリは、それぞれの後部切開部を通って挿入される、
請求項15乃至25のいずれか1項に記載の方法。 - 第3の骨アンカーアセンブリを第3の椎骨構造に固定するステップと;前記第3の骨アンカーアセンブリ内に前記脊椎ロッドを固定して据え付けるステップと;を含む、
請求項15乃至26のいずれか1項に記載の方法。 - 複数の追加の骨アンカーアセンブリを複数の追加の椎骨構造に固定するステップと;前記複数の追加の骨アンカーアセンブリ内に前記脊椎ロッドを固定して据え付けるステップと;を含む、
請求項15乃至27のいずれか1項に記載の方法。 - 少なくとも1つの前記ガイド部材は:
近位ガイド端部および遠位ガイド端部と;
前記近位ガイド端部から前記遠位ガイド端部に延びる管腔と;
脊椎ロッドを前記骨アンカーアセンブリ内に案内するように寸法決めされたロッドチャネルを形成するよう、前記遠位端部に開口し、前記ガイド部材に沿って前記管腔と隣接する長さにわたって近位に延びる、一対の対向する長手方向ロッドスロットと;
前記遠位端部にある骨アンカー係合機構と;
前記一対の対向する長手方向ロッドスロットの間で長手方向に延びるサイドトラックと;を有する、
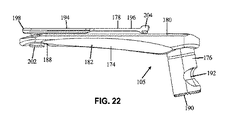
請求項1乃至8のいずれか1項に記載のシステム又は請求項10乃至28のいずれか1項に記載の方法。 - 骨アンカーアセンブリを位置決めし且つ角形成するためのガイド部材であって、前記ガイド部材は:
近位ガイド端部および遠位ガイド端部と;
前記近位ガイド端部から前記遠位ガイド端部に延びる管腔と;
脊椎ロッドを前記骨アンカー内に案内するように寸法決めされたロッドチャネルを形成するよう、前記遠位端部に開口し、前記ガイド部材に沿い且つ前記管腔と隣接する長さにわたって近位に延びる、一対の対向する長手方向ロッドスロットと;
前記遠位端部にある骨アンカー係合機構と;
前記一対の対向する長手方向ロッドスロットの間で長手方向に延びるサイドトラックと;を有する、
ガイド部材。 - 前記サイドトラックは、シムを摺動可能に受け入れるように構成される、
請求項29又は30に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、窪んだ面を有する、
請求項29乃至31のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、略平坦な窪んだ面を有する、
請求項29乃至32のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、窪んだ面に部分的に張り出す細長いリップ要素を有する、
請求項29乃至33のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、シムが前記サイドトラック内で摺動することを一時的に抑えるよう前記シムと相互作用するように構成された、シム拘束機構を有する、
請求項29乃至34のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、シムが前記サイドトラック内で摺動することを一時的に抑えるよう前記シムと相互作用するように構成された、第1のシム拘束機構および第2のシム拘束機構を有する、
請求項29乃至35のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、シムが前記サイドトラック内で摺動することを抑えるよう前記シムと相互作用するように構成された、凹部である、
請求項29乃至36のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記ガイド部材は、前記第1のサイドトラックに対向する、前記一対の対向する長手方向ロッドスロットの間で長手方向に延びる第2のサイドトラックを有する、
請求項29乃至37のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックの近位端部に器具係合機構を有する、
請求項29乃至38のいずれか1項に記載のシステム又は方法又はガイド部材。 - 外側スリーブと、前記外側スリーブ内に配置された一対の内側アーム部材とを有する、
請求項29乃至39のいずれか1項に記載のシステム又は方法又はガイド部材。 - 外側スリーブと、前記外側スリーブ内に配置された一対の内側アーム部材とを有し、前記アーム部材は、前記骨アンカーアセンブリのハウジングに解放可能に係合するように構成される、
請求項29乃至40のいずれか1項に記載のシステム又は方法又はガイド部材。 - 外側スリーブと、前記外側スリーブ内に配置された一対の内側アーム部材とを有し、前記アーム部材は、ロック位置とロック解除位置との間で移動可能であり、前記ロック解除位置にあるとき、前記アーム部材は骨アンカーアセンブリと係合されず、前記ロック位置にあるとき、前記アーム部材は前記骨アンカーアセンブリと固定して係合される、
請求項29乃至41のいずれか1項に記載のシステム又は方法又はガイド部材。 - 外側スリーブと、前記外側スリーブ内に配置された一対の内側アーム部材とを有し、前記外側スリーブは、近位端部と、遠位端部と、前記外側スリーブを通って長手方向に延びる管腔とを有する略管状の部材である、
請求項29乃至42のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックの近位端部に刻まれたロックラックインジケータパターンを有する、
請求項29乃至43のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックの近位端部に刻まれたロックラックインジケータパターンであって、アーム要素が前記サイドトラック内にあるが、確実にロックするために遠位方向に不完全に減少している場合、前記ロックラックインジケータパターンが前記アーム要素によって覆われるように、配置される、ロックラックインジケータパターンを有する、
請求項29乃至44のいずれか1項のシステム又は方法又はガイド部材。 - ピボットラックアームの取り付け要素が前記サイドトラック46内に適切に据えられたときにユーザに可視になる前記ガイド部材上に配置されたピボットラックインジケータパターンを有する、
請求項29乃至45のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記ガイド部材の長手方向軸に略垂直である前記ガイド部材上の切開深さインジケータパターンを有する、
請求項29乃至46のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記ガイドアセンブリの前記近位端部と前記遠位端部との間にある切開深さインジケータパターンを有する、
請求項29乃至47のいずれか1項に記載のシステム又は方法又はガイド部材。 - いつロックラックのアーム要素が前記サイドトラック内に滑り込むように適切に位置合わせされたか示すためのパターンを有する、
請求項29乃至39のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記ガイド部材はガイド部材の色を有し、前記パターンは、前記ガイド部材の色と対照的なパターンの色を有する、
請求項44乃至49のいずれか1項のシステム又は方法又はガイド部材。 - 前記ガイド部材はガイド部材の質感を有し、前記パターンは、前記ガイド部材の質感と対照的なパターンの質感を有する、
請求項44乃至50のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記サイドトラックは、前記管腔まで貫通する前記略平坦な窪んだ面内の複数の開口部を含み、前記開口部は、ラックを前記ガイドアセンブリに固定するように構成される、
請求項29乃至51のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記骨アンカー係合機構は、骨アンカーアセンブリに固定して取り付けられる、
請求項29乃至52のいずれか1項に記載のシステム又は方法又はガイド部材。 - 前記ピボットラックは:
それぞれ第1の端部および第2の端部を有する第1および第2のアームユニットであって、
それぞれ、前記第1の端部のガイド部材取り付け機構および前記第2の端部のアームアセンブリ取り付け機構を有する、第1および第2のアームユニットと;
前記アームアセンブリ取り付け機構においてそれぞれの前記第1および前記第2のアームユニットにそれぞれ係合可能な第1および第2のピボットアームアセンブリであって、前記アームアセンブリに対する前記アームユニットの回転を可逆的にロックすることができるアームユニット係合機構を有する、第1および第2のピボットアームアセンブリと;
前記第1および前記第2のアームアセンブリに係合される細長いラック部材と;
前記細長いラック部材に沿って前記第2のアームアセンブリを並進させるように構成される並進ユニットと;を有する、
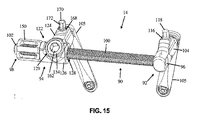
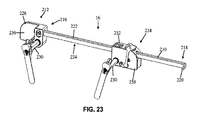
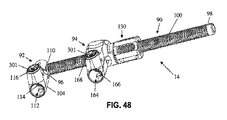
請求項1乃至29のいずれか1項に記載のシステム又は方法。 - 脊椎手術中に2つの骨アンカーの間の距離を制御するピボットラックであって、前記ピボットラックは:
それぞれ第1の端部および第2の端部を有する第1および第2のアームユニットであって、それぞれ、前記第1の端部のガイド部材取り付け機構および前記第2の端部のアームアセンブリ取り付け機構を有する、第1および第2のアームユニットと;
前記アームアセンブリ取り付け機構においてそれぞれの前記第1および前記第2のアームユニットにそれぞれ係合可能な第1および第2のピボットアームアセンブリであって、前記アームアセンブリに対する前記アームユニットの回転を可逆的にロックすることができるアームユニット係合機構を有する、第1および第2のピボットアームアセンブリと;
前記第1および前記第2のピボットアームアセンブリに係合される細長いラック部材と;
前記細長いラック部材に沿って前記第2のピボットアームアセンブリを並進させるように構成される並進ユニットと;を有する、
ピボットラック。 - 前記並進ユニットは、手動で握られることになるハンドルを有する第1の並進制御構造と、ドライバ器具によって加えられるトルクを受けるためのドライバ係合機構を有する第2の並進制御構造とを有する、
請求項54または55に記載のシステム又は方法又はピボットラック。 - 前記アームユニット係合機構は、各方向に90°以下の弧にわたって前記アームアセンブリに対する前記アームユニットの回転を可逆的に可能にする、
請求項54乃至56のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記アームユニット係合機構は、各方向に60°以下の弧にわたって前記アームアセンブリに対する前記アームユニットの回転を可逆的に可能にする、
請求項54乃至57のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記アームユニット係合機構は、各方向に30°以下の弧にわたって前記アームアセンブリに対する前記アームユニットの回転を可逆的に可能にする、
請求項54乃至58のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記細長いラック部材は、その長さのほとんどに延びるねじ山を有する、
請求項54乃至59のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記細長いラック部材は、第1の端部と、第2の端部と、前記第1の端部と前記第2の端部との間に延びるねじ山とを有する、
請求項54乃至60のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記細長いラック部材は、第1の端部および第2の端部を有し、前記第1の端部は、前記第1のピボットアームアセンブリに固定して取り付けられる、
請求項54乃至61のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記細長いラック部材は、第1の端部および第2の端部を有し、前記第2の端部は、前記ラック部材の前記第2の端部を超える前記第2のピボットアームの並進を防ぐキャップを含む、
請求項54乃至62のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1のピボットアームアセンブリは、前記細長いラック部材を中に受けるように寸法決めされた横方向凹部を持つハウジングを含む、
請求項54乃至63のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1および前記第2のピボットアームアセンブリの少なくとも1つは、前記アームユニットの前記アームアセンブリ取り付け機構を受けるように寸法決めされたキャビティを有するハウジングを含む、
請求項54乃至64のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1および前記第2のピボットアームアセンブリの少なくとも1つは、前記アームユニットの前記アームアセンブリ取り付け機構を受けるように寸法決めされたキャビティを有するハウジングを含み、前記キャビティは、前記アームユニットに対する前記アームアセンブリの回転を可能にするように形状が略円筒である、
請求項54乃至65のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1および前記第2のアームユニットの少なくとも」1つの前記アームアセンブリ取り付け機構の近位係合機構と;
前記第1および前記第2のピボットアームアセンブリの少なくとも1つのハウジングであって、前記ハウジングは、前記アームユニットの前記アームアセンブリ取り付け機構を受けるように寸法決めされたキャビティを有し、前記キャビティは、前記アームユニットの前記アームアセンブリ取り付け機構の前記近位係合機構と係合するように構成された略円形の隆起係合機構を含む、ハウジングと;を有する、
請求項54乃至66のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1および前記第2のピボットアームアセンブリの少なくとも1つは、前記アームユニットの前記アームアセンブリ取り付け機構を受けるように寸法決めされたキャビティの中に延びるねじ山付き開口部を有する、
請求項54乃至67のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1および前記第2のピボットアームアセンブリの少なくとも1つは、
前記アームユニットの前記アームアセンブリ取り付け機構を受けるように寸法決めされたキャビティの中に延びるねじ山付き開口部と;
前記ねじ山付き開口部内にねじ係合するロックピンと;を有する、
請求項54乃至68のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記第1および前記第2のピボットアームアセンブリの少なくとも1つは、
前記アームユニットの前記アームアセンブリ取り付け機構を受けるように寸法決めされたキャビティの中に延びるねじ山付き開口部と;
前記ねじ山付き開口部内にねじ係合するロックピンであって、ロックツールと遠位支柱要素とを係合させるための近位係合機構を有する、ロックピンと;を有する、
請求項54乃至69のいずれか1項に記載のシステム又は方法又はピボットラック。 - 前記近位係合機構は、多面体プリズムおよび多角形ソケットのうちの一方である、
請求項70に記載のシステム、方法、又はピボットラック。 - 前記近位係合機構は、六角頭部特徴部および六角形ソケットのうちの一方である、
請求項71に記載のシステム、方法、又はピボットラック。 - 前記ロックピンが操作されるとき、前記遠位支柱要素は、前記アームユニットの前記アームアセンブリ取り付け機構とのロック係合へと進められる、
請求項70乃至72のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記アームユニットの前記アームアセンブリ取り付け機構はロック凹部である、
請求項54乃至73のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記第2のピボットアームアセンブリは、それを通って前記細長いラック部材を受けるように寸法決めされた横方向管腔を持つハウジングを有する、
請求項54乃至74のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記横方向管腔は、前記並進ユニットを含む、
請求項75に記載のシステム、方法、又はピボットラック。 - 前記並進ユニットは、第2のギア部材と噛み合う第1のギア部材を含む、
請求項54乃至76のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記第1のギア部材は、前記細長いラック部材上に直接配置され、前記第1のギア部材の回転が前記細長いラック部材90に沿った前記第2のピボットアームアセンブリの並進を生じさせるように、前記細長いラック部材上のねじ山と噛み合う長手方向に延びるねじ山付き管腔を含む、
請求項77に記載のシステム、方法、又はピボットラック。 - ハンドルであって、前記ハンドルが手動で回転されるとき前記第1のギア部材が回転するように、前記第1のギア部材に回転可能にリンクされた、ハンドルを有する、
請求項77又は78に記載のシステム、方法、又はピボットラック。 - 前記ハンドルは、サムホイールである、
請求項79に記載のシステム、方法、又はピボットラック。 - 前記第2のギア部材の回転は、前記第1のギア部材の回転を引き起こす、
請求項77乃至80のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記第2のギア部材は、前記第1のギア部材を回転させるように前記第2のギア部材に十分なトルクを与えることができる器具を受けるためのドライバ係合機構を含む、外向き面を有する、
請求項77乃至81のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記第1および前記第2のアームユニットはそれぞれ、前記第1の端部と前記第2の端部との間に細長い硬いアーム要素を有する、
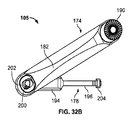
請求項54乃至82のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記第1および前記第2のアームユニットの少なくとも1つは、近位開口部、遠位開口部、および遠位凹部を有する、
請求項54乃至83のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記第1および前記第2のアームユニットの少なくとも1つは、不必要な組織外傷を避けるための輪郭を付けられた表面を持つ後面と、概して滑らかで平らな表面を持つ前面とを有する、
請求項54乃至84のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記アームアセンブリ取り付け機構は、隆起した近位係合機構を有する略円筒形のベース部材を有する、
請求項54乃至85のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ベース部材は、前記アーム要素の近位開口部と嵌合する、
請求項86に記載のシステム、方法、又はピボットラック。 - 前記ベース部材は、いったんロックされると前記アーム要素が前記近位取り付け要素に対して枢動しないような方法で、前記アーム要素の近位開口部と嵌合する、
請求項54乃至87のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ベース部材は、いったんロックされると前記アーム要素が前記近位取り付け要素に対して並進しないような方法で、前記アーム要素の近位開口部と嵌合する、
請求項54乃至88のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構はシムを含む、
請求項54乃至89のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、狭い近位部分と広い遠位部分とを有する、
請求項54乃至90のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、狭い近位部分と、前記アームユニットの遠位開口部を通って延びる支柱を有する広い遠位部分とを有する、
請求項54乃至91のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記アームアセンブリ取り付け機構は、対応する前記アームアセンブリのロックピンと係合するロック凹部を有する、
請求項54乃至92のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、略オール形状である、
請求項54乃至93のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記アームユニットの前記遠位開口部を通って遠位凹部の中に延びる支柱を含む、
請求項54乃至94のいずれか1項に記載のシステム、方法、又はピボットラック。 - 結合要素が、前記遠位凹部の中に配置され、その中で前記支柱の一部を受け、前記ガイド部材取り付け機構および前記アーム要素を枢動可能に結合する、
請求項95に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記ガイドアセンブリの前記サイドトラックの幅に対応する幅寸法を有する、
請求項54乃至96のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記サイドトラックの前記略平坦な面と前記細長いリップ要素との間の空隙の高さ寸法に対応する高さ寸法を有する、
請求項54乃至97のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記ガイド部材の前記サイドトラックと摺動可能に嵌合するよう構成される、
請求項54乃至98のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記ガイド部材の長手方向軸に垂直である1つの軸の周りに前記ガイド部材が回転することを可能にするように構成される、
請求項54乃至99のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記ガイド部材の長手方向軸に垂直且つ前記アームユニットの長手方向軸に対する垂線の約25、20、又は15°以内である1つの軸の周りに前記ガイド部材が回転することを可能にするように構成される、
請求項54乃至100のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ガイド部材取り付け機構は、前記ガイド部材に取り付けられ、前記ガイド部材は、脊椎ロッドを骨アンカーに案内するように寸法決めされたロッドチャネルを有し、
前記ガイド部材取り付け機構は、前記ガイド部材の長手方向軸に垂直且つ前記ロッドチャネルに垂直である1つの軸の周りに前記ガイド部材が回転することを可能にするように構成される、
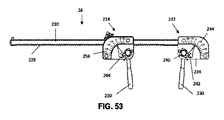
請求項54乃至101のいずれか1項に記載のシステム、方法、又はピボットラック。 - 前記ロックラックは:
第1の端部および第2の端部を有する細長いロックラック部材と;
前記細長いロックラック部材に取り付けられた第1のロックアームアセンブリと;
前記第1のロックアームアセンブリに回転可能に取り付けられるとともに第1のガイド部材に取り付けるように構成された第1のロックアーム部材と;
前記細長いロックラック部材に摺動可能に取り付けられた第2のロックアームアセンブリであって、前記第2のロックアームアセンブリが前記細長いロックラック部材に対して少なくとも一方向に摺動することを可逆的に妨げるロック機構を有する、第2のロックアームアセンブリと;
前記第2のロックアームアセンブリに回転可能に取り付けられるとともに第2のガイド部材に取り付けるように構成された第2のロックアーム部材と;
を有する、
請求項1乃至29、31乃至54、および56乃至102のいずれか1項に記載のシステム又は方法。 - 第1および第2のガイド部材の向きを制御するためのロックラックであって:
第1の端部および第2の端部を有する細長いロックラック部材と;
前記細長いロックラック部材に取り付けられた第1のロックアームアセンブリと;
前記第1のロックアームアセンブリに取り付けられるとともに前記第1のガイド部材に取り付けるように構成された第1のロックアーム部材と;
前記細長いロックラック部材に摺動可能に取り付けられた第2のロックアームアセンブリであって、前記第2のロックアームアセンブリが前記細長いロックラック部材に対して少なくとも一方向に摺動することを可逆的に妨げるロック機構を有する、第2のロックアームアセンブリと;
前記第2のロックアームアセンブリに回転可能に取り付けられるとともに前記第2のガイド部材に取り付けるように構成された第2のロックアーム部材と;
を有する、
ロックラック。 - 前記ロック機構は、スライドトグルである、
請求項103又は104に記載のシステム又は方法又はロックラック。 - 前記第1のロックアームアセンブリは、前記第2のロックアームアセンブリに対して前記細長いロックラック部材の長手方向軸の周りに回転するように構成される、
請求項103又は104に記載のシステム又は方法又はロックラック。 - 前記ロック機構は、前記第2のロックアームアセンブリが前記第1のロックアームアセンブリから離れて摺動することを可逆的に妨げる、
請求項103乃至105のいずれか1項に記載のシステム又は方法又はロックラック。 - 前記ロック機構は、前記第2のロックアームアセンブリが前記第1のロックアームアセンブリに向かって摺動することを可逆的に妨げる、
請求項103乃至107のいずれか1項に記載のシステム又は方法又はロックラック。 - 前記第1のロックアームアセンブリは、前記細長いロックラック部材に沿って並進しない、
請求項103乃至108のいずれか1項に記載のシステム又は方法又はロックラック。 - 前記細長いロックラック部材は複数ののこぎり歯を有し、前記ロック機構はラチェット機構を有する、
請求項103乃至109のいずれか1項に記載のシステム又は方法又はロックラック。 - 前記トグルは、前記トグルがロックされるとき、正確に一方向の動きを妨げるように構成される、
請求項103乃至110のいずれか1項に記載のシステム又は方法又はロックラック。 - 前記細長いロックラック部材は複数の三角形歯を有し、前記ロック機構は、前記ロック機構がロックされるとき、一方向の動きを妨げるように構成される、
請求項103乃至111のいずれか1項に記載のシステム又は方法又はロックラック。 - 動きが妨げられる前記一方向は、前記細長いロックラック部材に沿ったいずれかの方向から選択可能である、
請求項112に記載のシステム、方法、又はロックラック。 - 前記細長いロックラック部材は、前記第1のロックアームアセンブリと前記第2のロックアームアセンブリとの間の距離を示す複数のキャリブレーションマーキングを有する、
請求項103乃至113のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記細長いロックラック部材は、前記細長いロックラック部材の端部を超える前記第2のロックアームアセンブリの並進を防止するように配置された前記細長いロックラック部材の一端部の並進止めを有する、
請求項103乃至114のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアームアセンブリは、前記ハウジングの一端部に配置され且つ前記細長いロックラック部材の前記第1の端部を固定して受けるように構成された長手方向開口部を有する第1のキャリブレーションハウジングを有する、
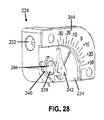
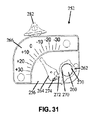
請求項103乃至115のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアームアセンブリおよび前記第2のロックアームアセンブリの少なくとも1つは、前記細長いロックラック部材と対応する前記第1又は前記第2のガイド部材との間の角度の関数である複数の距離を示す距離マーキングを有するマーキングパネルを含むキャリブレーションシステムを有する、
請求項103乃至116のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアームアセンブリおよび前記第2のロックアームアセンブリはそれぞれ、前記細長いロックラック部材と対応する前記第1又は前記第2のガイド部材との間の角度の関数である複数の距離を示す距離マーキングを有するそれぞれの第1および第2のマーキングパネルをそれぞれ含むそれぞれの第1および第2のキャリブレーションシステムを有し、前記第1および前記第2のガイド部材の前記遠位端部の間の距離は:前記第1のロックアームアセンブリと前記第2のロックアームアセンブリとの間の距離と、前記第1のマーキングパネルに示された距離と、前記第2のマーキングパネルに示された距離と、の合計である、
請求項103乃至117のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアームアセンブリおよび前記第2のロックアームアセンブリの少なくとも1つは、カム、針、およびマーキングパネルを含むキャリブレーションシステムを有する、
請求項103乃至118のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアームアセンブリおよび前記第2のロックアームアセンブリの少なくとも1つは、カム、針、およびマーキングパネルを含むキャリブレーションシステムを有し;横方向開口部が前記第1のロックアーム部材に回転可能に接続するように構成される、
請求項103乃至119のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記カムは、前記横方向開口部の中に少なくとも部分的に延び且つ前記横方向開口部内で回転可能である開口スリーブ延長部を有し、前記開口スリーブ延長部は、前記針のフランジと係合する横方向フランジを有し、前記カムの動きに応答して前記針を移動させる、
請求項120に記載のシステム、方法、又はロックラック。 - 前記第2のロックアームアセンブリは、第2のキャリブレーションハウジングと、前記第2のキャリブレーションハウジングを通って延び且つ前記細長いラック部材を並進可能に受けるように構成された長手方向管腔とを有する、
請求項103乃至121のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第2のロックアームアセンブリは、前記細長いラック部材の近位表面を見ることを可能にするように配置された観察開口部を含む近位表面を有する第2のキャリブレーションハウジングを有する、
請求項103乃至122のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記観察開口部は、ポインタを有する、
請求項123に記載のシステム、方法、又はロックラック。 - 前記第1および前記第2のロックアーム部材の少なくとも1つは、近位取り付け要素と、ガイド部材のサイドトラックの幅に対応する幅を持つアーム要素とを有する、
請求項103乃至124のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1および前記第2のロックアーム部材の少なくとも1つは、近位取り付け要素と、ガイド要素のサイドトラックの細長いリップ要素によって作られる空隙の高さに対応する高さを持つアーム要素とを有する、
請求項103乃至125のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1および前記第2のロックアーム部材の少なくとも1つは、近位取り付け要素と、2つの平行な側壁を有するアーム要素とを有する、
請求項103乃至126のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1および前記第2のロックアーム部材の少なくとも1つは:硬い細長いアーム要素と、前記ガイド部材に対して前記ロックアーム部材を定位置に固定してロックするように構成されたロック要素とを有する、
請求項103乃至127のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記ロック要素は、伸長位置と後退位置とを持つ突出要素を有し、前記伸長位置では、前記突出要素は、前記硬い細長いアーム要素の前面を超えて延び、一方、前記後退位置では、前記突出要素は、前記硬い細長いアーム要素の前記前面を超えて延びない、
請求項128に記載のシステム、方法、又はロックラック。 - 前記ロック要素は、器具からのトルクを前記突出要素の突出力に変換する器具係合機構および前記突出要素に突出力を与える手動スイッチのうちの1つである、
請求項128又は129に記載のシステム、方法、又はロックラック。 - 前記ロック要素は、ドライバ器具に係合するための六角頭部特徴部を有する、
請求項128乃至130のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記ロック要素は、前記伸長位置に向かってばね付勢されるサムスイッチを有する、
請求項128乃至131のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記ロックラックは、前記第1のアームユニットがその長手方向軸に沿って前記第1のロックアームアセンブリに対して並進することを可能にするように構成される、
請求項128乃至132のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記ロックラックは、前記第2のアームユニットがその長手方向軸に沿って前記第2のロックアームアセンブリに対して並進することを可能にするように構成される、
請求項128乃至133のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアーム部材は、前記第1のロックアーム部材がその長手方向軸の周りに前記第1のロックアームアセンブリに対して回転することを可能にするように、前記第1のロックアームアセンブリに対して回転可能に取り付けられる、
請求項128乃至134のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記第1のロックアーム部材は、前記第1のロックアーム部材がその長手方向軸の周りに前記第1のロックアームアセンブリに対して回転することを可能にするように、前記第1のロックアームアセンブリに対して回転可能に取り付けられる、
請求項128乃至135のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記ロックラックは、前記第1および前記第2のロックアーム部材がそれぞれ前記第1および前記第2のロックアームアセンブリに対して、各部材のそれぞれの長手方向軸の周りに回転することを可能にするように構成され、前記第1および前記第2のロックアーム部材がそれぞれ前記第1および前記第2のロックアームアセンブリに対して、各部材のそれぞれの長手方向軸に沿って並進することを可能にするように構成され、前記第1および前記第2のロックアーム部材が互いに対して前記細長いロックラック部材の長手方向軸の周りに回転することを可能にするように構成される、
請求項128乃至136のいずれか1項に記載のシステム、方法、又はロックラック。 - 前記骨アンカーアセンブリは、椎骨への安定した固定に適したアンカーと、脊椎ロッドを捕え且つロックするためのハウジングとを有する、
請求項1乃至8、11乃至29、および53のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは、前記骨アンカーと嵌合するベースを有する、
請求項138に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは、一対の直立アームを有する、
請求項138又は139に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは、ロッドチャネルを有する、
請求項138乃至140のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは:前記骨アンカーと嵌合するベースと、ロッドチャネルによって分離された一対の直立アームとを有する、
請求項138乃至141のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは一対の直立アームを有し、前記アームは、ロックキャップガイドおよび前進機構を有する、
請求項138乃至142のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは一対の直立アームを有し、前記アームは、ロックキャップガイドと、ロックスクリュー上の相補的ガイドおよび前進機構と噛み合う前進機構とを有する、
請求項138乃至143のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングは一対の直立アームを有し、前記アームは、ロックキャップガイドと、ロックスクリューに係合される前進機構とを有する、
請求項138乃至144のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングおよび前記アンカーは、前記ハウジングが前記アンカーに対して任意の方向に枢動することができるように、多軸係合にある
請求項138乃至145のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングおよび前記アンカーは、枢動することが1つまたは複数の方向で妨げられ得るような枢動係合にある、
請求項138乃至145のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングおよび前記アンカーは、一平面係合にある、
請求項138乃至145のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングおよび前記アンカーは、前記ハウジングと前記アンカーとの間で動きが可能でないように固定される、
請求項138乃至145のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングと前記アンカーとの相対角度はロック可能である、
請求項138乃至149のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記ハウジングと前記アンカーとの相対角度は、脊椎ロッドを前記ハウジングにロックする前に、ロック可能である、
請求項138乃至150のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 枢動可能、回転可能、および並進可能のうちの少なくとも1つであるロッドシートを有する、
請求項138乃至151のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。 - 前記アンカーは、ねじ山付きシャンクである、
請求項138乃至152のいずれか1項に記載のシステム、方法、又はガイドアセンブリ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662357941P | 2016-07-01 | 2016-07-01 | |
| US62/357,941 | 2016-07-01 | ||
| PCT/US2017/030282 WO2018004813A1 (en) | 2016-07-01 | 2017-04-28 | Spinal trauma correction and fixation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019520915A true JP2019520915A (ja) | 2019-07-25 |
| JP2019520915A5 JP2019520915A5 (ja) | 2020-05-28 |
Family
ID=59215957
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018568927A Pending JP2019520915A (ja) | 2016-07-01 | 2017-04-28 | 脊椎外傷の矯正および固定 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US10898239B2 (ja) |
| EP (3) | EP3747383B1 (ja) |
| JP (1) | JP2019520915A (ja) |
| CN (1) | CN109788975A (ja) |
| AU (2) | AU2017288105B2 (ja) |
| ES (1) | ES2849574T3 (ja) |
| WO (1) | WO2018004813A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015212056B3 (de) * | 2015-06-29 | 2016-09-01 | Silony Medical International AG | Vorrichtung zum Durchführen einer Distraktion oder einer Kompression von Wirbelkörpern bei einer Wirbelsäulenoperation |
| EP3747383B1 (en) * | 2016-07-01 | 2022-09-14 | Nuvasive, Inc. | Spinal trauma correction and fixation |
| CN110290756B (zh) * | 2017-02-17 | 2023-04-18 | 华沙整形外科股份有限公司 | 外科系统 |
| CN110267610B (zh) * | 2017-02-17 | 2023-02-21 | 华沙整形外科股份有限公司 | 外科系统和方法 |
| GB2566559B (en) * | 2017-11-03 | 2020-03-11 | Qspine Ltd | Retractors |
| EP3517062B1 (en) * | 2018-01-26 | 2021-03-17 | Aesculap AG | Spinal repositioning instrument and spinal repositioning system |
| DE102018116177A1 (de) * | 2018-07-04 | 2020-01-09 | Silony Medical International AG | Vorrichtung zur Korrektur einer Knochenfraktur |
| WO2020068883A1 (en) * | 2018-09-24 | 2020-04-02 | Astura Medical Inc. | Mis multi-level compressor / distractor |
| US20220218395A1 (en) * | 2019-04-23 | 2022-07-14 | Warsaw Orthopedic, Inc. | Surgical system and method |
| CN110179507B (zh) * | 2019-04-30 | 2023-12-08 | 首都医科大学附属北京天坛医院 | 颈椎撑开装置 |
| CN110151239B (zh) * | 2019-05-07 | 2020-11-10 | 张为 | 椎体撑开测量装置 |
| WO2021042156A1 (en) * | 2019-09-04 | 2021-03-11 | Simplify Medical Pty Limited | Vertebral distractor and surgical systems and methods |
| US11744571B1 (en) | 2022-06-27 | 2023-09-05 | Warsaw Orthopedic, Inc. | Surgical system and method for treating vertebral segments with uneven pedicles |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050245928A1 (en) * | 2004-05-03 | 2005-11-03 | Innovative Spinal Technologies | System and method for displacement of bony structures |
| US20080125788A1 (en) * | 2006-09-26 | 2008-05-29 | Cohen Dan S | Percutaneous instrument assembly |
| US20140039567A1 (en) * | 2012-08-01 | 2014-02-06 | Aesculap Ag | Surgical apparatus |
| US20150066088A1 (en) * | 2013-09-05 | 2015-03-05 | Warsaw Orthopedic, Inc. | Surgical instrument and method |
Family Cites Families (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4810698B1 (ja) | 1969-08-22 | 1973-04-06 | ||
| US5201734A (en) | 1988-12-21 | 1993-04-13 | Zimmer, Inc. | Spinal locking sleeve assembly |
| DE4127303A1 (de) | 1991-08-17 | 1993-02-18 | Aesculap Ag | Fixateur interne zur reposition einer lumbalen spondylolisthesis |
| US5741261A (en) * | 1996-06-25 | 1998-04-21 | Sdgi Holdings, Inc. | Minimally invasive spinal surgical methods and instruments |
| US7611522B2 (en) | 2003-06-02 | 2009-11-03 | Nuvasive, Inc. | Gravity dependent pedicle screw tap hole guide and data processing device |
| US6660006B2 (en) * | 2002-04-17 | 2003-12-09 | Stryker Spine | Rod persuader |
| US9539012B2 (en) * | 2002-10-30 | 2017-01-10 | Zimmer Spine, Inc. | Spinal stabilization systems with quick-connect sleeve assemblies for use in surgical procedures |
| US7955355B2 (en) * | 2003-09-24 | 2011-06-07 | Stryker Spine | Methods and devices for improving percutaneous access in minimally invasive surgeries |
| US7597694B2 (en) | 2004-01-30 | 2009-10-06 | Warsaw Orthopedic, Inc. | Instruments and methods for minimally invasive spinal stabilization |
| AU2012200106A1 (en) | 2004-08-15 | 2012-02-02 | Kevin Seex | Distraction and Retraction Assemblies. |
| US20060085010A1 (en) | 2004-09-29 | 2006-04-20 | The Cleveland Clinic Foundation | Minimally invasive method and apparatus for placing facet screws and fusing adjacent vertebrae |
| US7914536B2 (en) | 2005-03-11 | 2011-03-29 | Aesculap Ag | Bone repair device and method |
| EP1712185A1 (de) | 2005-04-14 | 2006-10-18 | Zimmer GmbH | Vorrichtung zur Aufrichtung eines eingebrochenen Wirbelkörpers |
| CN200987699Y (zh) | 2006-09-16 | 2007-12-12 | 李超 | 椎弓根钉置入导向器 |
| US20080077155A1 (en) | 2006-09-25 | 2008-03-27 | Jennifer Diederich | System and method for displacement of bony structures |
| US8734452B2 (en) | 2006-12-15 | 2014-05-27 | Spinefrontier, Inc | Guidance system,tools and devices for spinal fixation |
| US7998144B2 (en) | 2006-12-22 | 2011-08-16 | Aesculap Ag | Surgical instrument and osteosynthesis device |
| US7922731B2 (en) | 2006-12-22 | 2011-04-12 | Aesculap Ag | Surgical instrument and osteosynthesis device |
| US7981115B2 (en) | 2007-04-11 | 2011-07-19 | Warsaw Orthopedic, Inc. | Instruments and methods for sizing a connecting element for positioning along a bony segment |
| US7947046B2 (en) | 2007-06-21 | 2011-05-24 | Warsaw Orthopedic, Inc. | Anchor extenders for minimally invasive surgical procedures |
| US20100082066A1 (en) | 2008-09-30 | 2010-04-01 | Ashok Biyani | Posterior fixation device for percutaneous stabilization of thoracic and lumbar burst fractures |
| US20100087823A1 (en) | 2008-10-02 | 2010-04-08 | Kondrashov Dimitriy G | Pedicle preparation device to assist implantation of pedicle screws |
| CN201337505Y (zh) | 2009-02-04 | 2009-11-04 | 宓士军 | 三维椎体成形术穿刺定位导向器 |
| US9161787B2 (en) | 2009-04-23 | 2015-10-20 | The Johns Hopkins University | Vertebral body reduction instrument and methods related thereto |
| CN201642304U (zh) | 2010-05-13 | 2010-11-24 | 张建平 | 椎弓根钉植入角度导向器 |
| US8623022B2 (en) | 2010-09-20 | 2014-01-07 | Zimmer Spine, Inc. | Surgical instrument support system and method |
| US10702412B2 (en) * | 2010-11-30 | 2020-07-07 | Nikolaj Wolfson | Orthopedic joint hinge, methods and devices |
| US8702713B2 (en) | 2011-01-26 | 2014-04-22 | Warsaw Orthopedic, Inc. | Instruments and techniques for adjusting relative positioning of bones or bony tissues |
| US9198698B1 (en) | 2011-02-10 | 2015-12-01 | Nuvasive, Inc. | Minimally invasive spinal fixation system and related methods |
| JP4810698B1 (ja) | 2011-02-16 | 2011-11-09 | 株式会社湊川金属テストピース製作所 | 椎弓根挿入器具ガイド装置 |
| US8911442B2 (en) | 2011-10-26 | 2014-12-16 | Alphatec Spine, Inc. | Systems for vertebral adjustments and rod reduction |
| US9125703B2 (en) | 2012-01-16 | 2015-09-08 | K2M, Inc. | Rod reducer, compressor, distractor system |
| CN202699270U (zh) | 2012-02-15 | 2013-01-30 | 李国胜 | 胸腰椎椎弓根钉置入角度测量导向仪 |
| DE102012101780B4 (de) | 2012-03-02 | 2020-09-24 | Aesculap Ag | Spondylolisthese - Repositionsinstrumentarium |
| DE202012100745U1 (de) | 2012-03-02 | 2012-04-03 | Aesculap Ag | Spondylolisthese - Repositionsinstrumentarium |
| US9561062B2 (en) | 2012-03-19 | 2017-02-07 | Alphatec Spine, Inc. | Spondylolisthesis reduction system |
| WO2013158660A1 (en) | 2012-04-17 | 2013-10-24 | Alphatec Spine, Inc. | Instrument and method for spinal compression and distraction |
| CN202723973U (zh) | 2012-07-28 | 2013-02-13 | 刘飞 | 脊柱椎弓根螺钉植入角度导引器 |
| US20140107659A1 (en) | 2012-10-12 | 2014-04-17 | Alphatec Spine, Inc. | In situ rod measuring instrument and method of use |
| US9480504B1 (en) | 2013-03-15 | 2016-11-01 | Nuvasive, Inc. | Spinal alignment frame |
| EP3449854B1 (en) * | 2014-03-14 | 2020-07-08 | Wright Medical Technology, Inc. | Orthopedic compression/distraction device |
| US9956003B2 (en) | 2015-09-18 | 2018-05-01 | Warsaw Orthopedic, Inc | Spinal implant system and methods of use |
| EP3747383B1 (en) * | 2016-07-01 | 2022-09-14 | Nuvasive, Inc. | Spinal trauma correction and fixation |
-
2017
- 2017-04-28 EP EP20188355.0A patent/EP3747383B1/en active Active
- 2017-04-28 EP EP22195215.3A patent/EP4119077A1/en active Pending
- 2017-04-28 ES ES17733182T patent/ES2849574T3/es active Active
- 2017-04-28 EP EP17733182.4A patent/EP3478194B1/en active Active
- 2017-04-28 WO PCT/US2017/030282 patent/WO2018004813A1/en unknown
- 2017-04-28 JP JP2018568927A patent/JP2019520915A/ja active Pending
- 2017-04-28 CN CN201780052507.3A patent/CN109788975A/zh active Pending
- 2017-04-28 AU AU2017288105A patent/AU2017288105B2/en active Active
- 2017-08-16 US US15/678,877 patent/US10898239B2/en active Active
-
2020
- 2020-12-16 US US17/123,343 patent/US20210128204A1/en active Pending
-
2023
- 2023-03-14 AU AU2023201555A patent/AU2023201555A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050245928A1 (en) * | 2004-05-03 | 2005-11-03 | Innovative Spinal Technologies | System and method for displacement of bony structures |
| US20080125788A1 (en) * | 2006-09-26 | 2008-05-29 | Cohen Dan S | Percutaneous instrument assembly |
| US20140039567A1 (en) * | 2012-08-01 | 2014-02-06 | Aesculap Ag | Surgical apparatus |
| US20150066088A1 (en) * | 2013-09-05 | 2015-03-05 | Warsaw Orthopedic, Inc. | Surgical instrument and method |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2849574T3 (es) | 2021-08-19 |
| EP3478194A1 (en) | 2019-05-08 |
| EP3747383B1 (en) | 2022-09-14 |
| EP3747383A1 (en) | 2020-12-09 |
| EP3478194B1 (en) | 2021-01-27 |
| EP4119077A1 (en) | 2023-01-18 |
| CN109788975A (zh) | 2019-05-21 |
| AU2017288105B2 (en) | 2023-01-12 |
| US20210128204A1 (en) | 2021-05-06 |
| US10898239B2 (en) | 2021-01-26 |
| WO2018004813A1 (en) | 2018-01-04 |
| AU2017288105A1 (en) | 2019-02-07 |
| US20180214189A1 (en) | 2018-08-02 |
| AU2023201555A1 (en) | 2023-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210128204A1 (en) | Spinal Trauma Correction and Fixation | |
| US11571247B2 (en) | Spinal alignment frame | |
| JP7041735B2 (ja) | 脊椎インプラントシステムおよび方法 | |
| US10729556B2 (en) | Spinal implant system and method | |
| US20190021716A1 (en) | Spinal implant system and method for lumbar and lumbosacral fusion | |
| US8951258B2 (en) | Spinal correction system and method | |
| CN110290756B (zh) | 外科系统 | |
| EP2043533B1 (en) | System for spine fixation | |
| AU2014332317A1 (en) | Spinal implant system and method for lumbar and lumbosacral fusion | |
| WO2006038959A1 (en) | Minimally invasive method and apparatus for placing facet screws and fusing adjacent vertebrae | |
| WO2015054070A1 (en) | Spinal implant system and method for lumbar and lumbosacral fusion | |
| US20230059813A1 (en) | Surgical system and method | |
| Ould-Slimane et al. | Posterior C1C2 harms fusion with 3D surgical navigation | |
| US11583267B2 (en) | Methods and devices for surgical access |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200420 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210406 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210820 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220118 |