JP2019122609A - 動作の滑らかさ分析システム及び方法 - Google Patents
動作の滑らかさ分析システム及び方法 Download PDFInfo
- Publication number
- JP2019122609A JP2019122609A JP2018005650A JP2018005650A JP2019122609A JP 2019122609 A JP2019122609 A JP 2019122609A JP 2018005650 A JP2018005650 A JP 2018005650A JP 2018005650 A JP2018005650 A JP 2018005650A JP 2019122609 A JP2019122609 A JP 2019122609A
- Authority
- JP
- Japan
- Prior art keywords
- jerk
- relative
- acceleration
- angular
- angular velocity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000004458 analytical method Methods 0.000 title claims abstract description 20
- 238000000034 method Methods 0.000 title description 11
- 230000036461 convulsion Effects 0.000 claims abstract description 219
- 230000001133 acceleration Effects 0.000 claims abstract description 156
- 230000003287 optical effect Effects 0.000 claims description 22
- 210000003205 muscle Anatomy 0.000 abstract description 7
- 238000004364 calculation method Methods 0.000 description 27
- 238000005259 measurement Methods 0.000 description 17
- 238000012545 processing Methods 0.000 description 11
- 239000011159 matrix material Substances 0.000 description 9
- 239000003550 marker Substances 0.000 description 8
- 230000004069 differentiation Effects 0.000 description 7
- 230000009466 transformation Effects 0.000 description 6
- 210000001364 upper extremity Anatomy 0.000 description 5
- 238000011156 evaluation Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 210000002023 somite Anatomy 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 210000003323 beak Anatomy 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 210000001503 joint Anatomy 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images





Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
【課題】被験者の動作の滑らかさを分析するにあたり、体節毎の動きの滑らかさを定量的に測定し、体節ないし関節や筋が被験者の動作の滑らかさに与える影響を定量的に分析する。【解決手段】被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得する手段と、第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得する手段と、同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する手段とを備える。【選択図】図1
Description
本発明は、動作の滑らかさ分析システム及び方法に関するものである。
躍度および角躍度は動作の滑らかさ、ないし円滑さを表す指標として知られている。躍度は、加速度の時間微分値であり、加速度を1階微分することで算出することができる。角躍度は、角加速度の時間微分値であり、角速度を2階微分することで算出することができる。
特許文献1、非特許文献1では、患者が水平テーブル上で上肢運動を行う際の手先位置を手先位置計測器によって計測し、計測データをもとに、運動のなめらかさをあらわす評価関数(手先直交座標躍度、関節角躍度、トルク変化)を計算している。特許文献1の段落[0022]には、「滑らかな動きは、加速度の変化が少ない動きであると考えられるので、加速度の評価である躍度の大きさ、つまり加速度の1回微分の大きさによって定量化することができる。そこで、滑らかさ評価部は、躍度の大きさ(2乗和)を運動全体によって加算することにより、その運動全体の滑らかさの度合いを評価する。この値が小さいほど滑らかな動きであることが示されるようになる。」と記載されている。
非特許文献2では、動作の円滑さを示す指標として、加速度を微分した躍度の二乗の総和(Jerk Cost)、及び、Jerk Costを動作時間と動作距離で補正した躍度の指数(Jerk Index)を用いることが記載されている。実験では、被験者が水を入れたビーカと錘を入れたビーカをそれぞれ手で持って昇降させる動作において、ビーカに取り付けた3次元加速度トランスデューサを用いて加速度を計測し、躍度を計算している。
このように、動作の滑らかさを取得するために躍度や角躍度を取得することが提案されており、躍度や角躍度を用いることで被験者自体の動作の滑らかさを評価している。より具体的には、特許文献1、非特許文献1では、水平なテーブル上での上肢の一定の運動時間における上肢の動作の滑らかさを評価しており、非特許文献2では、ビーカを持った上肢の昇降動作における当該動作の滑らかさを評価している。しかしながら、これらの研究では、被験者自体の動作の滑らかさ(滑らかでない程度)は評価できても、どの体節ないし関節や筋によって滑らかでなくなっているかを定量的に測定することはできない。例えば、非特許文献2では、1つの加速度センサーが取り付けられたビーカの躍度を計算することで、ビーカの躍度を被験者の上肢の躍度とみなしているが、上肢全体の動作の滑らかさを評価することはできても、どの体節に起因して動作が滑らかでなくなっているかについては知ることができない。
運動学習とリハビリテーション 道免 和久 バイオメカニズム学会誌 25 巻 (2001) 4 号
加速度計を用いた高齢者歩行の安定性評価(動作の円滑さという視点から)小島 基永 バイオメカニズム学会誌,Vol.30,No.3(2006)
本発明は、被験者の動作の滑らかさを分析するにあたり、体節毎の動きの滑らかさを定量的に測定し、体節ないし関節や筋が被験者の動作の滑らかさに与える影響を定量的に分析することを目的とする。
本発明が採用した技術手段は、
被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得する手段と、
第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得する手段と、
同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する手段と、
を備えた動作の滑らかさ分析システム、である。
被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得する手段と、
第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得する手段と、
同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する手段と、
を備えた動作の滑らかさ分析システム、である。
本発明では、取得した相対躍度および/あるいは相対角躍度を指標値として、あるいは、相対躍度および/あるいは相対角躍度に基づいて算出した値(相対躍度や相対角躍度から派生した値であって、例えば、二乗、平均、正規化等の数値の加工が含まれ、また、この数値の加工には、従来のJerk CostやJerk Indexないしこれらに準じる処理を含んでもよい)を指標値として、動作の滑らかさを評価ないし分析する。
1つの態様では、相対躍度および/あるいは相対角躍度を取得する手段は、さらに、相対躍度および/あるいは相対角躍度の派生物(例えば、二乗、平均、正規化等の加工処理により得られた値)を取得することを含み、派生物を用いて動作の滑らかさを評価ないし分析してもよい。
1つの態様では、相対躍度、相対角躍度における「相対」は差分であるが、比率でもよい。
1つの態様では、相対躍度および/あるいは相対角躍度を取得する手段は、さらに、相対躍度および/あるいは相対角躍度の派生物(例えば、二乗、平均、正規化等の加工処理により得られた値)を取得することを含み、派生物を用いて動作の滑らかさを評価ないし分析してもよい。
1つの態様では、相対躍度、相対角躍度における「相対」は差分であるが、比率でもよい。
1つの態様では、前記加速度および/あるいは前記角速度を取得する手段は、前記第1体節に設けた第1慣性センサー及び前記第2体節に設けた第2慣性センサーである。同時刻で計測値を取得するためには、前記第1慣性センサーと前記第2慣性センサーによる加速度および/あるいは角速度の計測が同期していることが当業者に理解される。
また、第1慣性センサーと第2慣性センサーの計測値を比較するためには、第1慣性センサーの座標系と第2慣性センサーの座標系を相互に変換可能であることが必要であり、センサー間の座標系の変換のための関係が得られていることが当業者に理解される。
1つの態様では、前記第1慣性センサー、前記第2慣性センサーは、6軸センサーまたは9軸センサーである。
また、第1慣性センサーと第2慣性センサーの計測値を比較するためには、第1慣性センサーの座標系と第2慣性センサーの座標系を相互に変換可能であることが必要であり、センサー間の座標系の変換のための関係が得られていることが当業者に理解される。
1つの態様では、前記第1慣性センサー、前記第2慣性センサーは、6軸センサーまたは9軸センサーである。
1つの態様では、前記加速度および/あるいは前記角速度を取得する手段は、光学式モーションキャプチャにより取得された位置情報、角度情報を微分することで前記加速度および/あるいは前記角速度を取得するものである。
1つの態様では、前記相対躍度を取得する手段は、
前記第1加速度と前記第2加速度を用いて相対加速度を取得し、前記相対加速度を微分して相対躍度を取得する手段、あるいは、
前記第1加速度と前記第2加速度を微分して第1躍度および第2躍度を取得し、前記第1躍度と前記第2躍度を用いて相対躍度を取得する手段、
から選択される。
前記第1加速度と前記第2加速度を用いて相対加速度を取得し、前記相対加速度を微分して相対躍度を取得する手段、あるいは、
前記第1加速度と前記第2加速度を微分して第1躍度および第2躍度を取得し、前記第1躍度と前記第2躍度を用いて相対躍度を取得する手段、
から選択される。
1つの態様では、前記相対角躍度を取得する手段は、
前記第1角速度と前記第2角速度を用いて相対角速度を取得し、前記相対角速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角速度と前記第2角速度を微分して第1角加速度および第2角加速度を取得し、前記第1角加速度および前記第2角加速度を用いて取得した相対角加速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角速度と前記第2角速度を微分して第1角躍度および第2角躍度を取得し、前記第1角躍度と前記第2角躍度を用いて相対角躍度を取得する手段、
から選択される。
前記第1角速度と前記第2角速度を用いて相対角速度を取得し、前記相対角速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角速度と前記第2角速度を微分して第1角加速度および第2角加速度を取得し、前記第1角加速度および前記第2角加速度を用いて取得した相対角加速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角速度と前記第2角速度を微分して第1角躍度および第2角躍度を取得し、前記第1角躍度と前記第2角躍度を用いて相対角躍度を取得する手段、
から選択される。
本発明は、被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得し、
第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得し、
同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する、
動作の滑らかさ分析方法、としても規定される。
第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得し、
第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得し、
同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する、
動作の滑らかさ分析方法、としても規定される。
本発明が採用した他の技術手段は、
被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の位置情報および/あるいは角度情報を、第1位置情報および/あるいは第1角度情報として取得する手段と、
第2体節の位置情報および/あるいは角度情報を、第2位置情報および/あるいは第2角度情報として取得する手段と、
同時刻に得られた第1位置情報および/あるいは第1角度情報と第2位置情報および/あるいは第2角度情報を用いて、相対躍度および/あるいは相対角躍度を取得する手段と、
を備えた動作の滑らかさ分析システム、である。
1つの態様では、前記位置情報および/あるいは角度情報を取得する手段は、光学式モーションキャプチャである。
1つの態様では、前記相対躍度を取得する手段は、
第1位置情報と第2位置情報を用いて相対位置情報を取得し、前記相対位置情報を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1速度情報と第2速度情報を取得し、前記第1速度情報と前記第2速度情報を用いて取得した相対速度情報を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1加速度と第2加速度を取得し、前記第1加速度と前記第2加速度を用いて相対加速度を取得し、前記相対加速度を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1躍度および第2躍度を取得し、前記第1躍度と前記第2躍度を用いて、相対躍度を取得する手段、
から選択される。
1つの態様では、前記相対角躍度を取得する手段は、
第1角度情報と第2角度情報を用いて相対角度情報を取得し、前記相対角度情報を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角速度および第2角速度を取得し、前記第1角速度と前記第2角速度を用いて相対角速度を取得し、前記相対角速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角加速度および第2角加速度を取得し、前記第1角加速度および前記第2角加速度を用いて取得した相対角加速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角躍度および第2角躍度を取得し、前記第1角躍度と前記第2角躍度を用いて相対角躍度を取得する手段、
から選択される。
被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の位置情報および/あるいは角度情報を、第1位置情報および/あるいは第1角度情報として取得する手段と、
第2体節の位置情報および/あるいは角度情報を、第2位置情報および/あるいは第2角度情報として取得する手段と、
同時刻に得られた第1位置情報および/あるいは第1角度情報と第2位置情報および/あるいは第2角度情報を用いて、相対躍度および/あるいは相対角躍度を取得する手段と、
を備えた動作の滑らかさ分析システム、である。
1つの態様では、前記位置情報および/あるいは角度情報を取得する手段は、光学式モーションキャプチャである。
1つの態様では、前記相対躍度を取得する手段は、
第1位置情報と第2位置情報を用いて相対位置情報を取得し、前記相対位置情報を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1速度情報と第2速度情報を取得し、前記第1速度情報と前記第2速度情報を用いて取得した相対速度情報を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1加速度と第2加速度を取得し、前記第1加速度と前記第2加速度を用いて相対加速度を取得し、前記相対加速度を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1躍度および第2躍度を取得し、前記第1躍度と前記第2躍度を用いて、相対躍度を取得する手段、
から選択される。
1つの態様では、前記相対角躍度を取得する手段は、
第1角度情報と第2角度情報を用いて相対角度情報を取得し、前記相対角度情報を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角速度および第2角速度を取得し、前記第1角速度と前記第2角速度を用いて相対角速度を取得し、前記相対角速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角加速度および第2角加速度を取得し、前記第1角加速度および前記第2角加速度を用いて取得した相対角加速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角躍度および第2角躍度を取得し、前記第1角躍度と前記第2角躍度を用いて相対角躍度を取得する手段、
から選択される。
本発明は、被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の位置情報および/あるいは角度情報を、第1位置情報および/あるいは第1角度情報として取得し、
第2体節の位置情報および/あるいは角度情報を、第2位置情報および/あるいは第2角度情報として取得し、
同時刻に得られた第1位置情報および/あるいは第1角度情報と第2位置情報および/あるいは第2角度情報を用いて、相対躍度および/あるいは相対角躍度を取得する、
動作の滑らかさ分析方法、としても規定される。
第1体節の位置情報および/あるいは角度情報を、第1位置情報および/あるいは第1角度情報として取得し、
第2体節の位置情報および/あるいは角度情報を、第2位置情報および/あるいは第2角度情報として取得し、
同時刻に得られた第1位置情報および/あるいは第1角度情報と第2位置情報および/あるいは第2角度情報を用いて、相対躍度および/あるいは相対角躍度を取得する、
動作の滑らかさ分析方法、としても規定される。
本発明では、隣接する体節間の相対的な躍度や角躍度を計測することによって、動作の滑らかさを阻害している体節や筋・関節などを特定し、滑らかさの程度を定量化することができる。
例えば、隣接する体節間の相対的な躍度や角躍度によって、いずれの体節の動作がより滑らかであるか(あるいは滑らかでないか)を決定することができる。
例えば、隣接する3つの体節A、体節B、体節Cの体節Aと体節Bの間の相対躍度、相対角躍度と体節Bと体節Cの間の相対躍度、相対角躍度を対比することで、体節Aと体節Bとの関節と体節Bと体節Cの関節のいずれが動作の滑らかさを阻害している関節であるかの特定が可能となる。
また、動作の滑らかさを阻害している体節や関節が特定できれば、計測動作から動作に関連している筋は推定可能であるので、滑らかさを阻害している筋を推定することが可能となる。さらに、リハビリテーションにおいて、治療対象とすべき対象筋を絞り込むことができれば、効果的な治療指針を立てることが可能となり、より効果的・効率的なリハビリテーションを提供することが可能となる。
例えば、隣接する体節間の相対的な躍度や角躍度によって、いずれの体節の動作がより滑らかであるか(あるいは滑らかでないか)を決定することができる。
例えば、隣接する3つの体節A、体節B、体節Cの体節Aと体節Bの間の相対躍度、相対角躍度と体節Bと体節Cの間の相対躍度、相対角躍度を対比することで、体節Aと体節Bとの関節と体節Bと体節Cの関節のいずれが動作の滑らかさを阻害している関節であるかの特定が可能となる。
また、動作の滑らかさを阻害している体節や関節が特定できれば、計測動作から動作に関連している筋は推定可能であるので、滑らかさを阻害している筋を推定することが可能となる。さらに、リハビリテーションにおいて、治療対象とすべき対象筋を絞り込むことができれば、効果的な治療指針を立てることが可能となり、より効果的・効率的なリハビリテーションを提供することが可能となる。
[A]全体構成
本実施形態に係る動作の滑らかさ分析システムは、被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、被験者が第1体節及び第2体節を含む部位を動作させた時の第1体節の加速度を第1加速度として取得する第1加速度取得手段と、第1体節の角速度を第1角速度として取得する第1角速度取得手段と、第2体節の加速度を第2加速度として取得する第2加速度取得手段と、第2体節の角速度を第2角速度として取得する第2角速度取得手段と、同時刻に得られた第1加速度と第2加速度を用いて相対躍度を取得する相対躍度取得手段と、同時刻に得られた第1角速度と第2角速度を用いて相対角躍度を取得する相対角躍度取得手段と、を備えている。加速度取得手段及び角速度取得手段としては、以下に述べるように、慣性センサーを用いる第1の態様(図1)、光学式モーションキャプチャを用いる第2の態様(図2)を例示することができる。
本実施形態に係る動作の滑らかさ分析システムは、被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、被験者が第1体節及び第2体節を含む部位を動作させた時の第1体節の加速度を第1加速度として取得する第1加速度取得手段と、第1体節の角速度を第1角速度として取得する第1角速度取得手段と、第2体節の加速度を第2加速度として取得する第2加速度取得手段と、第2体節の角速度を第2角速度として取得する第2角速度取得手段と、同時刻に得られた第1加速度と第2加速度を用いて相対躍度を取得する相対躍度取得手段と、同時刻に得られた第1角速度と第2角速度を用いて相対角躍度を取得する相対角躍度取得手段と、を備えている。加速度取得手段及び角速度取得手段としては、以下に述べるように、慣性センサーを用いる第1の態様(図1)、光学式モーションキャプチャを用いる第2の態様(図2)を例示することができる。
本実施形態は、選択した2つの隣接する体節間の相対躍度、相対角躍度を取得するものであるが、実際の計測では、3つ以上隣接する体節(体節A、体節B、体節C、・・・)のそれぞれに慣性センサーや光学式マーカーを取り付けて、体節A(第1体節)と体節B(第2体節)の間の相対躍度、相対角躍度、体節B(第1体節)と体節C(第2体節)の間の相対躍度、相対角躍度、・・・を取得してもよい。
[B]慣性センサーを用いた加速度、角速度の取得
1つの態様では、第1加速度取得手段、第2加速度取得手段は、加速度センサーである。1つの態様では、第1角速度取得手段、第2角速度取得手段は、ジャイロスコープないし角速度センサーである。1つの態様では、加速度センサー及び角速度センサーを備えたセンサーモジュール(6軸センサーないし9軸センサー)を用いることで、加速度及び角速度を取得する。
1つの態様では、第1加速度取得手段、第2加速度取得手段は、加速度センサーである。1つの態様では、第1角速度取得手段、第2角速度取得手段は、ジャイロスコープないし角速度センサーである。1つの態様では、加速度センサー及び角速度センサーを備えたセンサーモジュール(6軸センサーないし9軸センサー)を用いることで、加速度及び角速度を取得する。
9軸センサーを例にとると、9軸センサーは、3軸加速度センサー、3軸ジャイロスコープ、3軸地磁気センサー、制御部(MCU等)、バッテリ、無線通信機能(ブルートゥース等)を備えたセンサーモジュールであり、このセンサーモジュールを、被験者の所定の隣接する第1体節と第2体節に装着することで、隣接する第1体節と第2体節の加速度データ、角速度データ、地磁気データ(本実施形態では必ずしも用いられないが)が取得される。加速度データ、角速度データは、地磁気データは、各センサーモジュールが持つ通信機能を介してコンピュータ(処理部、記憶部を構成する)に送信され、各センサーから出力されたデータを保存し、所定の計算(後述するように、加速度の1階微分や角速度の2階微分が実行される)が実行される。第1体節に装着される9軸センサーと第2体節に装着される9軸センサーはセンサー間で時間を同期させデータ取得を行う。
[C]光学式モーションキャプチャを用いた加速度、角速度の取得
1つの態様では、第1加速度取得手段、第2加速度取得手段は、光学式モーションキャプチャによって取得された位置情報を用いて加速度を算出する手段である。1つの態様では、第1角速度取得手段、第2角速度取得手段は、光学式モーションキャプチャにより取得された角度情報を用いて角速度を算出する手段である。
1つの態様では、第1加速度取得手段、第2加速度取得手段は、光学式モーションキャプチャによって取得された位置情報を用いて加速度を算出する手段である。1つの態様では、第1角速度取得手段、第2角速度取得手段は、光学式モーションキャプチャにより取得された角度情報を用いて角速度を算出する手段である。
光学式モーションキャプチャシステムは、被験者の複数の所定部位に装着した複数の光学式マーカー(例えば、赤外線反射マーカー)と、光学式マーカーを装着した被験者の運動を複数角度から同時に撮影する複数台のカメラと、各カメラで取得したマーカーの画像情報中のマーカーの二次元位置の時系列データを再構成してマーカーの三次元位置の時系列データを取得し、身体の各部位の三次元位置を取得する処理部と、計測データや計測データに基づいて計算されたデータを記憶する記憶部と、処理部による処理結果(被験者の姿勢の時系列データとして取得される運動データ)等を表示する表示部と、からなる。処理部、記憶部、表示部は、コンピュータ(例えば、入力部、出力部、演算部、記憶部、表示部等を備える汎用コンピュータ)から構成される。本実施形態では、光学式マーカーを被験者の所定の隣接する第1体節と第2体節に装着することで、隣接する第1体節と第2体節の位置情報、角度情報の時系列データを取得する。処理部において、第1体節の位置情報を微分することで第1加速度を算出し、第2体節の位置情報を微分することで第2加速度を算出する。同様に、第1体節の角度を微分することで第1体節の第1角速度を算出し、第2体節の角度を微分することで第2体節の第2角速度を算出する。
なお、第1加速度、第1角速度、第2加速度、第2角速度を用いずに相対躍度、相対角躍度を取得する手段として、光学式モーションキャプチャを用いる第3の態様(図5)があるが、これについては後述する。
[D]相対躍度、相対角躍度の取得
慣性センサーや光学式モーションキャプチャを利用して第1加速度、第1角速度、第2加速度、第2角速度が得られている場合に、これらの情報を用いて相対躍度、相対角躍度を取得する手段としては、第1の態様(図3)、第2の態様(図4)を例示することができる。
慣性センサーや光学式モーションキャプチャを利用して第1加速度、第1角速度、第2加速度、第2角速度が得られている場合に、これらの情報を用いて相対躍度、相対角躍度を取得する手段としては、第1の態様(図3)、第2の態様(図4)を例示することができる。
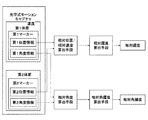
図3に示すように、第1の態様では、第1加速度と第2加速度を用いて相対加速度を算出する相対加速度算出手段と、相対加速度を1階微分して相対躍度を算出する相対躍度算出手段と、第1角速度と第2角速度を用いて相対角速度を算出する相対角速度算出手段と、相対角速度を2階微分して相対角躍度を算出する相対角躍度算出手段とを備えている。これらの各算出手段は、コンピュータ(例えば、入力部、出力部、演算部、記憶部、表示部等を備える汎用コンピュータ)によって構成することができる。なお、図1に示す相対角躍度算出手段を、第1角速度と第2角速度を用いて第1角加速度および第2角加速度を取得する手段と、第1角加速度および第2角加速度を用いて相対角加速度を取得する手段(図示せず)と、相対角加速度を用いて相対角躍度を取得する手段とから構成してもよい。
図4に示すように、第2の態様では、第1加速度を1階微分して第1躍度を算出する第1躍度算出手段と、第2加速度を1階微分して第2躍度を算出する第2躍度算出手段と、第1躍度と第2躍度を用いて相対躍度を算出する相対躍度算出手段と、第1角速度を2階微分して第1角躍度を算出する第1角躍度算出手段と、第2角速度を2階微分して第2角躍度を算出する第2角躍度算出手段と、第1角躍度と第2角躍度を用いて相対角躍度を算出する相対躍度算出手段とを備えている。これらの各算出手段は、コンピュータ(例えば、入力部、出力部、演算部、記憶部、表示部等を備える汎用コンピュータ)によって構成することができる。
相対躍度や相対角躍度の計算に慣性センサーから取得したデータを用いる場合には、較正によって各慣性センサーの座標系を世界座標系に一致させておき、時刻tにおける第1センサーの世界座標系からセンサー座標系に変換する行列、第2センサーの世界座標系からセンサー座標系に変換する行列を取得し、時刻tにおける第1センサーと第2センサーの相対的な位置関係を取得することで、第1センサーから得られた情報と第2センサーから得られた情報を同じ座標系で対比して、相対加速度、相対角速度、ないし、相対躍度、相対角躍度を計算する。
実際には、慣性センサーにより計測した加速度、角速度はノイズ成分を含む場合があり、また、相対躍度や相対角躍度の計算に必要な微分によりノイズが生じるため、これらのノイズを除去する必要がある。ノイズ除去手段としては、バターワースフィルター、カルマンフィルター、その他のローパスフィルター、移動平均フィルター、加重平均フィルター等のフィルターを例示することができる。
第1の態様は、相対加速度、相対角速度を求めた後に微分を行って相対躍度、相対角躍度を求めるものであり、第2の態様は、加速度、角速度の微分を先に行って躍度、角躍度を求めた後に相対的な躍度や角躍度を求めるものである。第1の態様、第2の態様において、微分の順番やフィルターの順番などで得られる値自体は変わり得るが、計算された相対躍度や相対角躍度は、動作の滑らかさの指標として利用可能である。
[E]相対躍度・相対角躍度の計算方法
相対躍度・相対角躍度の具体的な計算方法の1つの実施形態について説明する。本実施形態は、慣性センサーを用いるものであり、慣性センサーとしては加速度センサー及び角速度センサーを備えた6軸センサー、9軸センサーが例示される。
相対躍度・相対角躍度の具体的な計算方法の1つの実施形態について説明する。本実施形態は、慣性センサーを用いるものであり、慣性センサーとしては加速度センサー及び角速度センサーを備えた6軸センサー、9軸センサーが例示される。
[ステップ1]センサーの時間同期
一般に、各センサーのデータはセンサー内のタイマーにより個別の値になっている。そのため、これらのタイマーの値を一致させる(もしくは対応関係を作る)必要がある。動作を計測するための周波数(最低20Hz程度)でセンサーの同期を行うために、同期用にユニットを使用して時間合わせを行う。同期用のユニットは図5に示すような構成となっている。なお、慣性センサーとPC間はBluetoothで、PCとカウンタボード制御ユニット間はUSB、カウンタボード制御ユニットとカウンタボードは基板上で接続されている。
一般に、各センサーのデータはセンサー内のタイマーにより個別の値になっている。そのため、これらのタイマーの値を一致させる(もしくは対応関係を作る)必要がある。動作を計測するための周波数(最低20Hz程度)でセンサーの同期を行うために、同期用にユニットを使用して時間合わせを行う。同期用のユニットは図5に示すような構成となっている。なお、慣性センサーとPC間はBluetoothで、PCとカウンタボード制御ユニット間はUSB、カウンタボード制御ユニットとカウンタボードは基板上で接続されている。
計測前にカウンタボードと慣性センサーのタイムスタンプを一致させるため、データ取得前に慣性センサーとカウンタボードを接続して、PCからの制御信号で、カウンタボード、慣性センサーのタイムスタンプをリセットする。タイムスタンプのリセットが終わったら、慣性センサーを取り外し、計測対象に取り付ける。計測開始タイミングでカウンタボード制御ユニットにPCからの計測スタート信号を送る。この信号によりカウンタボードにラッチ(ラップタイム)を保存する。なお、外部同期によるスタートの場合は、カウンタボード制御ユニットに同期信号を入れ、それをもとにラッチをかける。計測が終了したら、カウンタボード制御ユニットを通してラッチの時間をPCが取得し、ラッチの時間を計測スタートとなるようにデータを並べ替える。なお、Bluetoothを通してPCにはデータが常に送信されている。
[ステップ2]センサーの座標合わせ
慣性センサー(例えば9軸センサー)の座標系と世界座標系は一致していないため、計測前に座標系を一致させるための較正作業を行って座標系を合わせる。このような較正作業としては、例えば、特開2015−227813号に記載された手法(この手法には限定されない)を用いることができる。以下では、センサーに対する世界座標系を一致させる処理がすでに行われているものとして扱う。なお、ステップ1とステップ2の順序は逆でもよい。
慣性センサー(例えば9軸センサー)の座標系と世界座標系は一致していないため、計測前に座標系を一致させるための較正作業を行って座標系を合わせる。このような較正作業としては、例えば、特開2015−227813号に記載された手法(この手法には限定されない)を用いることができる。以下では、センサーに対する世界座標系を一致させる処理がすでに行われているものとして扱う。なお、ステップ1とステップ2の順序は逆でもよい。
[ステップ3]センサーの取り付け
被験者の隣接する2体節にそれぞれ慣性センサー(例えば、9軸センサー)を貼り付ける。すなわち、隣接する第1体節と第2体節において、第1体節に第1センサーを設け、第2体節に第2センサーを設ける。
被験者の隣接する2体節にそれぞれ慣性センサー(例えば、9軸センサー)を貼り付ける。すなわち、隣接する第1体節と第2体節において、第1体節に第1センサーを設け、第2体節に第2センサーを設ける。
[ステップ4]相対加速度、相対角速度の計測
a) 変換行列
ここでは、第1センサーと第2センサーの2つのセンサーを考える。
時刻tにおける第1センサーの世界座標系からセンサー座標系に変換する行列(第1変換行列)を
 とする。
とする。
時刻tにおける第2センサーの世界座標系からセンサー座標系に変換する行列(第2変換行列)を
とする。
第1変換行列と第2変換行列を用いることで、時刻tにおける第1センサーと第2センサーの相対的な位置関係を取得することができる。
なお、以下の記述において、必要がない場合は時刻を表すtは省略する。
a) 変換行列
ここでは、第1センサーと第2センサーの2つのセンサーを考える。
時刻tにおける第1センサーの世界座標系からセンサー座標系に変換する行列(第1変換行列)を
時刻tにおける第2センサーの世界座標系からセンサー座標系に変換する行列(第2変換行列)を
第1変換行列と第2変換行列を用いることで、時刻tにおける第1センサーと第2センサーの相対的な位置関係を取得することができる。
なお、以下の記述において、必要がない場合は時刻を表すtは省略する。
b) 相対加速度の計算方法
慣性センサーの生データとして、各センサーから時間同期された状態での加速度が出力される。以下に任意の時間での相対加速度の計算方法を記載する。
センサー座標系での第1センサーの加速度を
第2センサーの加速度を
とする。
第1センサーに対する第2センサーの相対加速度は
となる。この値を数値微分することで、相対躍度を計算することができる。
慣性センサーの生データとして、各センサーから時間同期された状態での加速度が出力される。以下に任意の時間での相対加速度の計算方法を記載する。
センサー座標系での第1センサーの加速度を
第1センサーに対する第2センサーの相対加速度は
c) 相対角速度の計算方法
慣性センサーの生データとして、各センサーから時間同期された状態での角速度が出力される。
上記の相対加速度の計算方法と同様の計算を行うことで、相対角速度を計算することができる。
慣性センサーの生データとして、各センサーから時間同期された状態での角速度が出力される。
上記の相対加速度の計算方法と同様の計算を行うことで、相対角速度を計算することができる。
[ステップ5]上記のデータを使用した相対躍度・角躍度の計算
上記のデータに対して、隣接する2つのフレームの値の差分を取り計測周波数を掛けることで、相対角躍度や相対角躍度の計算自体は可能であるが、実際には加速度・角速度はノイズ成分を含むため、ノイズ除去が実行される。
上記のデータに対して、隣接する2つのフレームの値の差分を取り計測周波数を掛けることで、相対角躍度や相対角躍度の計算自体は可能であるが、実際には加速度・角速度はノイズ成分を含むため、ノイズ除去が実行される。
a) 相対躍度の計算方法
第1センサーに対する第2センサーの相対加速度
をメモリ上に保存しておく。これらの値に対してローパスフィルターをかける。なお、メモリに保存する数は、ローパスフィルターをかけた際に値が一定になるために十分な数を保存しておく。ローパスフィルター後の相対加速度を
としたときに、相対躍度は
で計算される。
第1センサーに対する第2センサーの相対加速度
b) 相対角躍度の計算方法
上記と同様に、時刻tにおける第1センサーに対する第2センサーの相対角速度を、
と表すとき、相対角速度
をメモリ上に保存しておく。これらの値に対してローパスフィルターをかける。なお、メモリに保存する数は、ローパスフィルターをかけた際に値が一定になるために十分な数を保存しておく。ローパスフィルター後の相対角速度を
としたときに、相対角加速度は
で計算される。
上記と同様に、時刻tにおける第1センサーに対する第2センサーの相対角速度を、
さらに、相対角加速度
をメモリ上に保存しておく。これらの値に対してローパスフィルターをかける。ローパスフィルター後の相対角加速度を
としたときに、相対角躍度は
で計算される。
本実施形態(図1、図3に対応)では、相対加速度、相対角速度を求めた後に微分を行っているが、微分を先に行い、各センサー座標系での躍度や角躍度を求めた後に相対的な躍度や角躍度を求めてもよい(図4参照)。本実施形態では、リアルタイムで躍度や角躍度を取得しているが、計算終了後に計算する場合は通常のローパスフィルターを利用してもよい。
慣性センサーを用いた相対躍度・相対角躍度の取得方法について説明したが、光学式モーションキャプチャからなる三次元動作分析装置を用いて、以下のステップにより相対躍度・相対角躍度を取得してもよい。光学式モーションキャプチャを用いたシステムにおいては、図2に記載した態様のみならず、図5に記載した態様によって躍度、角躍度を算出することができる。
図5に示すように、光学式モーションキャプチャによって、第1体節の位置情報および角度情報を、第1位置情報および第1角度情報として取得し、第2体節の位置情報および角度情報を、第2位置情報および第2角度情報として取得する。そして、相対位置算出手段によって、同時刻に得られた第1位置情報と第2位置情報を用いて相対位置情報を取得し、相対角度算出手段によって、同時刻に得られた第1角度情報と第2角度情報を用いて相対角度情報を取得する。そして、相対躍度算出手段によって、相対位置情報を3階微分(相対位置情報→相対速度→相対加速度→相対躍度)することで、相対躍度を取得する。相対角躍度算出手段によって、相対角度情報を3階微分(相対角度情報→相対角速度情報→相対角加速度情報→相対角躍度)することで、相対角躍度を取得する。あるいは、同時刻に得られた第1位置情報と第2位置情報を微分することで第1速度情報と第2速度情報を取得し、相対速度算出手段によって相対速度情報を取得し、相対躍度算出手段によって、相対位置情報を2階微分(相対速度→相対加速度→相対躍度)することで、相対躍度を取得してもよい。
図5に示すシステムを用いた躍度、角躍度の計算の取得手順は以下の通りである。
[ステップ1]
被験者の隣接する2体節にそれぞれ光学式マーカーを貼り付ける。すなわち、隣接する第1体節と第2体節において、第1体節に第1マーカーを設け、第2体節に第2マーカーを設ける。
[ステップ2]
光学式モーションキャプチャにより、第1体節、第2体節の位置情報及び角度情報の時系列データを取得する。
[ステップ3]
同時刻に得られた位置情報および角度情報を用いて相対位置情報(あるいは相対速度情報)および相対角度情報を取得する。そして、相対位置情報の3階微分(あるいは相対速度情報の2階微分)を行って相対躍度を取得し、相対角度情報の3階微分を行って相対角躍度を取得する。微分やノイズ除去については、慣性センサーを用いた相対躍度、相対角躍度の計算を参照することができる。
[ステップ1]
被験者の隣接する2体節にそれぞれ光学式マーカーを貼り付ける。すなわち、隣接する第1体節と第2体節において、第1体節に第1マーカーを設け、第2体節に第2マーカーを設ける。
[ステップ2]
光学式モーションキャプチャにより、第1体節、第2体節の位置情報及び角度情報の時系列データを取得する。
[ステップ3]
同時刻に得られた位置情報および角度情報を用いて相対位置情報(あるいは相対速度情報)および相対角度情報を取得する。そして、相対位置情報の3階微分(あるいは相対速度情報の2階微分)を行って相対躍度を取得し、相対角度情報の3階微分を行って相対角躍度を取得する。微分やノイズ除去については、慣性センサーを用いた相対躍度、相対角躍度の計算を参照することができる。
Claims (10)
- 被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得する手段と、
第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得する手段と、
同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する手段と、
を備えた動作の滑らかさ分析システム。 - 前記加速度および/あるいは前記角速度を取得する手段は、前記第1体節に設けた第1慣性センサー及び前記第2体節に設けた第2慣性センサーである、
請求項1に記載の分析システム。 - 前記加速度および/あるいは前記角速度を取得する手段は、光学式モーションキャプチャにより取得された位置情報、角度情報を微分することで前記加速度および/あるいは前記角速度を取得するものである、
請求項1に記載の分析システム。 - 前記相対躍度を取得する手段は、
前記第1加速度と前記第2加速度を用いて相対加速度を取得し、前記相対加速度を微分して相対躍度を取得する手段、あるいは、
前記第1加速度と前記第2加速度を微分して第1躍度および第2躍度を取得し、前記第1躍度と前記第2躍度を用いて相対躍度を取得する手段、
から選択される、
請求項1〜3いずれか1項に記載の分析システム。 - 前記相対角躍度を取得する手段は、
前記第1角速度と前記第2角速度を用いて相対角速度を取得し、前記相対角速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角速度と前記第2角速度を微分して第1角加速度および第2角加速度を取得し、前記第1角加速度および前記第2角加速度を用いて取得した相対角加速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角速度と前記第2角速度を微分して第1角躍度および第2角躍度を取得し、前記第1角躍度と前記第2角躍度を用いて相対角躍度を取得する手段、
から選択される、請求項1〜4いずれか1項に記載の分析システム。 - 被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の位置情報および/あるいは角度情報を、第1位置情報および/あるいは第1角度情報として取得する手段と、
第2体節の位置情報および/あるいは角度情報を、第2位置情報および/あるいは第2角度情報として取得する手段と、
同時刻に得られた第1位置情報および/あるいは第1角度情報と第2位置情報および/あるいは第2角度情報を用いて、相対躍度および/あるいは相対角躍度を取得する手段と、
を備えた動作の滑らかさ分析システム。 - 前記相対躍度を取得する手段は、
第1位置情報と第2位置情報を用いて相対位置情報を取得し、前記相対位置情報を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1速度情報と第2速度情報を取得し、前記第1速度情報と前記第2速度情報を用いて取得した相対速度情報を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1加速度と第2加速度を取得し、前記第1加速度と前記第2加速度を用いて相対加速度を取得し、前記相対加速度を微分して相対躍度を取得する手段、あるいは、
第1位置情報と第2位置情報を微分して第1躍度および第2躍度を取得し、前記第1躍度と前記第2躍度を用いて、相対躍度を取得する手段、
から選択される、
請求項6に記載の分析システム。 - 前記相対角躍度を取得する手段は、
第1角度情報と第2角度情報を用いて相対角度情報を取得し、前記相対角度情報を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角速度および第2角速度を取得し、前記第1角速度と前記第2角速度を用いて相対角速度を取得し、前記相対角速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角加速度および第2角加速度を取得し、前記第1角加速度および前記第2角加速度を用いて取得した相対角加速度を微分して相対角躍度を取得する手段、あるいは、
前記第1角度情報と前記第2角度情報を微分して第1角躍度および第2角躍度を取得し、前記第1角躍度と前記第2角躍度を用いて相対角躍度を取得する手段、
から選択される、請求項6、7いずれか1項に記載の分析システム。 - 被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の加速度および/あるいは角速度を、第1加速度および/あるいは第1角速度として取得し、
第2体節の加速度および/あるいは角速度を、第2加速度および/あるいは第2角速度として取得し、
同時刻に得られた第1加速度と第2加速度および/あるいは第1角速度と第2角速度を用いて、相対躍度および/あるいは相対角躍度を取得する、
動作の滑らかさ分析方法。 - 被験者の複数の体節から選択した2つの隣接する第1体節及び第2体節において、
第1体節の位置情報および/あるいは角度情報を、第1位置情報および/あるいは第1角度情報として取得し、
第2体節の位置情報および/あるいは角度情報を、第2位置情報および/あるいは第2角度情報として取得し、
同時刻に得られた第1位置情報および/あるいは第1角度情報と第2位置情報および/あるいは第2角度情報を用いて、相対躍度および/あるいは相対角躍度を取得する、
動作の滑らかさ分析方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018005650A JP2019122609A (ja) | 2018-01-17 | 2018-01-17 | 動作の滑らかさ分析システム及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018005650A JP2019122609A (ja) | 2018-01-17 | 2018-01-17 | 動作の滑らかさ分析システム及び方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019122609A true JP2019122609A (ja) | 2019-07-25 |
Family
ID=67398210
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018005650A Pending JP2019122609A (ja) | 2018-01-17 | 2018-01-17 | 動作の滑らかさ分析システム及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019122609A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111672087A (zh) * | 2020-06-13 | 2020-09-18 | 曲灏辰 | 一种适用于街舞的肌肉震动检测系统和检测方法 |
| CN113116339A (zh) * | 2021-03-02 | 2021-07-16 | 深圳市第二人民医院(深圳市转化医学研究院) | 一种骨科病人移动监测预警方法及系统 |
| TWI780878B (zh) * | 2021-08-26 | 2022-10-11 | 晶翔機電股份有限公司 | 運動姿態的校正方法及裝置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11333021A (ja) * | 1998-05-27 | 1999-12-07 | Japan Science & Technology Corp | フィードフォワード運動訓練装置および フィードフォワード運動評価システム |
| JP2007151948A (ja) * | 2005-12-07 | 2007-06-21 | Kansai Electric Power Co Inc:The | 転倒判定方法及びその装置 |
| JP2010234859A (ja) * | 2009-03-30 | 2010-10-21 | Denso Corp | 移動体周辺撮影装置 |
| JP2011120787A (ja) * | 2009-12-11 | 2011-06-23 | Toyota Motor Corp | 筋力予測方法と作業負荷予測装置 |
| US20160262685A1 (en) * | 2013-11-12 | 2016-09-15 | Highland Instruments, Inc. | Motion analysis systemsand methods of use thereof |
| JP2016209212A (ja) * | 2015-05-01 | 2016-12-15 | 国立大学法人岐阜大学 | 運動分析装置 |
| US20170305312A1 (en) * | 2016-04-25 | 2017-10-26 | Grammer Ag | Adjustable damping system for a vehicle seat |
-
2018
- 2018-01-17 JP JP2018005650A patent/JP2019122609A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11333021A (ja) * | 1998-05-27 | 1999-12-07 | Japan Science & Technology Corp | フィードフォワード運動訓練装置および フィードフォワード運動評価システム |
| JP2007151948A (ja) * | 2005-12-07 | 2007-06-21 | Kansai Electric Power Co Inc:The | 転倒判定方法及びその装置 |
| JP2010234859A (ja) * | 2009-03-30 | 2010-10-21 | Denso Corp | 移動体周辺撮影装置 |
| JP2011120787A (ja) * | 2009-12-11 | 2011-06-23 | Toyota Motor Corp | 筋力予測方法と作業負荷予測装置 |
| US20160262685A1 (en) * | 2013-11-12 | 2016-09-15 | Highland Instruments, Inc. | Motion analysis systemsand methods of use thereof |
| JP2016209212A (ja) * | 2015-05-01 | 2016-12-15 | 国立大学法人岐阜大学 | 運動分析装置 |
| US20170305312A1 (en) * | 2016-04-25 | 2017-10-26 | Grammer Ag | Adjustable damping system for a vehicle seat |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111672087A (zh) * | 2020-06-13 | 2020-09-18 | 曲灏辰 | 一种适用于街舞的肌肉震动检测系统和检测方法 |
| CN111672087B (zh) * | 2020-06-13 | 2021-05-07 | 曲灏辰 | 一种适用于街舞的肌肉震动检测系统和检测方法 |
| CN113116339A (zh) * | 2021-03-02 | 2021-07-16 | 深圳市第二人民医院(深圳市转化医学研究院) | 一种骨科病人移动监测预警方法及系统 |
| CN113116339B (zh) * | 2021-03-02 | 2024-01-30 | 深圳市第二人民医院(深圳市转化医学研究院) | 一种骨科病人移动监测预警方法及系统 |
| TWI780878B (zh) * | 2021-08-26 | 2022-10-11 | 晶翔機電股份有限公司 | 運動姿態的校正方法及裝置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Destelle et al. | Low-cost accurate skeleton tracking based on fusion of kinect and wearable inertial sensors | |
| Roetenberg | Inertial and magnetic sensing of human motion | |
| Liu et al. | A mobile force plate and three-dimensional motion analysis system for three-dimensional gait assessment | |
| CN108338791B (zh) | 失稳运动数据的检测装置及检测方法 | |
| CN109579853A (zh) | 基于bp神经网络的惯性导航室内定位方法 | |
| CN107616898B (zh) | 基于日常动作的上肢穿戴式康复机器人及康复评价方法 | |
| JP2019122609A (ja) | 動作の滑らかさ分析システム及び方法 | |
| Seifert et al. | Pattern recognition in cyclic and discrete skills performance from inertial measurement units | |
| Taunyazov et al. | A novel low-cost 4-DOF wireless human arm motion tracker | |
| CN110609621A (zh) | 姿态标定方法及基于微传感器的人体运动捕获系统 | |
| Yahya et al. | Accurate shoulder joint angle estimation using single RGB camera for rehabilitation | |
| Madrigal et al. | 3D motion tracking of the shoulder joint with respect to the thorax using MARG sensors and data fusion algorithm | |
| Loose et al. | Gait patterns in standard scenarios: Using Xsens MTw inertial measurement units | |
| Castañeda et al. | Knee joint angle monitoring system based on inertial measurement units for human gait analysis | |
| CN114663913A (zh) | 一种基于Kinect的人体步态参数提取方法 | |
| CN114271812A (zh) | 基于惯性传感器的三维步态分析系统及方法 | |
| Lin et al. | Using hybrid sensoring method for motion capture in volleyball techniques training | |
| Sun et al. | An artificial neural network framework for lower limb motion signal estimation with foot-mounted inertial sensors | |
| Tsekleves et al. | Wii your health: a low-cost wireless system for home rehabilitation after stroke using Wii remotes with its expansions and blender | |
| Madrigal et al. | Evaluation of suitability of a micro-processing unit of motion analysis for upper limb tracking | |
| CN105575239B (zh) | 一种骨折复位训练模型角度检测装置及其方法 | |
| Martínez-Solís et al. | A portable system with sample rate of 250 Hz for characterization of knee and hip angles in the sagittal plane during gait | |
| Xu et al. | Measuring human joint movement with IMUs: Implementation in custom-made low cost wireless sensors | |
| Vox et al. | Evaluation of motion tracking methods for therapeutic assistance in everyday living environments | |
| TWI413030B (zh) | 動作重建及比對裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190920 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200605 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201126 |