JP2019063902A - Articulated robot and its operation method - Google Patents
Articulated robot and its operation method Download PDFInfo
- Publication number
- JP2019063902A JP2019063902A JP2017189684A JP2017189684A JP2019063902A JP 2019063902 A JP2019063902 A JP 2019063902A JP 2017189684 A JP2017189684 A JP 2017189684A JP 2017189684 A JP2017189684 A JP 2017189684A JP 2019063902 A JP2019063902 A JP 2019063902A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- end effector
- actuator
- link
- articulated robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
Abstract
Description
この発明は、各種産業分野において物品の加工や移載、組立等に用いられる多関節ロボット、およびその操作方法に関する。 The present invention relates to an articulated robot used for processing, transfer, assembly and the like of articles in various industrial fields, and an operation method thereof.
上記多関節ロボットの一種で、水平方向にアームが動作する水平多関節ロボット、いわゆるスカラロボットがある(例えば特許文献1〜3)。他に、複数の回転関節を有し、人の腕に近い動作をするロボットアーム型の多関節ロボットもある(例えば特許文献4、5)。
There is a horizontal articulated robot in which an arm operates in the horizontal direction, a so-called SCARA robot, which is a kind of the articulated robot (for example,
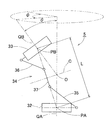
本件出願人は、スカラロボットにおいて、図21に示すように、第一アーム3と第二アーム4とを有し、第二アーム3の先端にパラレルリンク機構5を設けたものを提案している(特願2017−65605)。パラレルリンク機構5は、回転機構310により軸心O3回りに回転可能、かつ昇降機構311により軸心O3に沿って昇降可能に設置されている。この提案の構成によると、パラレルリンク機構5に取り付けられたエンドエフェクタ300を任意の角度に姿勢変更することが可能となり、エンドエフェクタ300により複雑な作業を行うことができる。
The applicant has proposed a SCARA robot having a
しかし、上記提案の構成では、例えば、図21に図示するように、エンドエフェクタ300に把持された物品301を固定位置に設けられたワーク302の斜めの穴302aに挿入するような作業が難しい。つまり、物品301を穴302aに挿入するには、物品301の中心軸と穴302aの中心軸とが一致するようにパラレルリンク機構5によりエンドエフェクタ300の姿勢を保ちながら、エンドエフェクタ300を物品301の中心軸および穴302aの中心軸に沿って斜めに移動させる必要がある。そのためには、第一アーム3、第二アーム4、パラレルリンク機構5、回転機構310、および昇降機構311の動作を細かく制御しなければならず、制御が非常に難しい。
However, in the proposed configuration, for example, as illustrated in FIG. 21, it is difficult to insert the
そこで本件出願人は、上記提案の構成に加えて、パラレルリンク機構5に1軸直動機構を搭載し、この1軸直動機構にエンドエフェクタ300を取り付けることを試みた。1軸直動機構を設けると、第一アーム3、第二アーム4、パラレルリンク機構5、回転機構310、および昇降機構311は作動させずに、1軸直動機構でエンドエフェクタ300を進退させるだけで、物品301をワーク302の穴302aに挿入することができるため、制御が簡単になる。
Therefore, in addition to the configuration proposed above, the applicant of the present invention mounted a 1-axis linear motion mechanism on the
前記スカラロボットに使用する1軸直動機構としては、軽量化、簡素化、および低コスト化のために、すべりねじ構造の採用を検討しているが、すべりねじ構造であると、そのすべりねじ部のガタの影響が懸念される。つまり、1軸直動機構による物品301の送り方向と、穴302aの向きとにずれが生じることにより、物品301が穴302aの内壁に当って、物品301を穴302aにスムーズに挿入できない恐れがある。1軸直動機構としてすべりねじ構造を採用するには、上記ガタの影響について対策を講じる必要がある。
As a one-axis linear motion mechanism used for the SCARA robot, adoption of slide screw structure is being studied for weight reduction, simplification, and cost reduction. However, if it is a slide screw structure, the slide screw There is a concern about the effects of backlash in the department. That is, there is a possibility that the
また、本件出願人は、ベルトコンベアによって搬送されるワークの上向きの穴に物品を挿入する作業を、スカラロボットを用いて行うことを試みている。具体的には、スカラロボットのいずれかの箇所に昇降機構を設け、この昇降機構により物品把持用のエンドエフェクタを下降させて、ベルトコンベア上のワークの穴に物品を挿入させるのである。しかし、ベルトコンベアによる搬送では、搬送時の振動によってワークが動くことがある。ワークが動くと、物品とワークの位置関係にずれが生じ、ワークの穴に物品を挿入させることができなくなる。 In addition, the applicant has attempted to use a SCARA robot to insert an article into an upward hole of a workpiece conveyed by a belt conveyor. Specifically, an elevating mechanism is provided at any part of the SCARA robot, and the elevating mechanism lowers the end effector for gripping the article to insert the article into the hole of the work on the belt conveyor. However, in conveyance by a belt conveyor, a work may move by vibration at the time of conveyance. When the workpiece moves, the positional relationship between the article and the workpiece is deviated, and the article can not be inserted into the hole of the workpiece.
特許文献1に、スカラロボットを用いた物品の組立において、スカラロボットが把持した物品をワークに組み込む際のミスを無くすことができるロボット組立装置が提案されている。このロボット組立装置も、上記同様に、スカラロボットが把持したピン(物品)を、各アームを作動させて所定の平面視位置へ移動させた後、アームごとピンを下降させて、作業台上のワークの穴にピンを挿入する。この提案では、作業台を、水平面に沿ってX軸方向およびY軸方向に移動可能としている。これにより、ワークの穴にピンを挿入する際に、ワークの穴とピンとの間にずれが生じている場合、ピンをZ軸方向に下げて行くに従い、ワークがピンに倣って動くことで位置ずれを吸収することができる。
しかし、上記特許文献1の構成は、ピンに倣って作業台が動くように作業台を支持する機構が必要であるため、装置全体が高価になるという課題がある。
However, since the structure of the said
この発明の目的は、エンドエフェクタに把持された物品と固定位置に設けられたワークと接触させて行う作業を、物品とワークとの位置ずれの影響を受けることなく、精度良く行うことができる多関節ロボットを提供することである。
この発明の他の目的は、物品をワークの穴に挿入させる作業を、物品とワークとの位置ずれの影響を受けることなく行わせることができる上記多関節ロボットの操作方法を提供することである。
It is an object of the present invention to accurately perform an operation performed by bringing an article held by an end effector into contact with a work provided at a fixed position without being affected by the positional deviation between the article and the work. It is providing a joint robot.
Another object of the present invention is to provide a method of operating the above-described articulated robot capable of performing an operation of inserting an article into a hole of a workpiece without being affected by the positional deviation between the article and the workpiece. .
この発明の多関節ロボットは、支持体に設けられ鉛直方向の軸心回りに回転自在な第一アームと、この第一アームを回転させる第一アーム用アクチュエータと、前記第一アームの先端に設けられ鉛直方向の軸心回りに回転自在な第二アームと、この第二アームを回転させる第二アーム用アクチュエータと、前記第二アームの先端に設けられエンドエフェクタを鉛直方向の軸心回りに回転および姿勢変更のいずれか一方または両方を可能に支持するエンドエフェクタ作動機構と、このエンドエフェクタ作動機構を作動させるエンドエフェクタ作動機構用アクチュエータとを備え、
前記第一アーム用アクチュエータ、前記第二アーム用アクチュエータ、および前記エンドエフェクタ作動機構用アクチュエータのうちの少なくとも一つのアクチュエータは、出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備することを特徴とする。
The articulated robot according to the present invention comprises a first arm provided on a support and rotatable about an axis in the vertical direction, an actuator for a first arm for rotating the first arm, and a tip of the first arm. And an actuator for the second arm that rotates the second arm, and an end effector provided at the tip of the second arm about the vertical axis. And an end effector operation mechanism for operating the end effector operation mechanism, and an end effector operation mechanism capable of supporting either or both of the position change and the posture change,
At least one of the first arm actuator, the second arm actuator, and the end effector operation mechanism actuator can interrupt transmission of the reverse input torque applied to the output side to the rotational drive unit Clutch mechanism is provided.
この多関節ロボットは、常時は、前記クラッチ機構を接続状態としておく。この状態で、第一アームおよび第二アームを回転させてエンドエフェクタの平面視位置を変更し、かつエンドエフェクタ作動機構を作動させてエンドエフェクタの回転および姿勢変更のいずれか一方または両方を行いつつ、エンドエフェクタにより作業を行う。その際、エンドエフェクタに外力が加わった場合、第一アーム用アクチュエータ、第二アーム用アクチュエータ、およびエンドエフェクタ作動機構用アクチュエータのうちの少なくとも一つのアクチュエータが具備するクラッチ機構を遮断状態にする。これにより、そのアクチュエータの回転駆動部へ逆入力トルクが伝達されないようなる。このため、クラッチ機構を具備するアクチュエータで動作させる動作対象、つまり第一アーム、第二アーム、およびエンドエフェクタ作動機構のいずれかが自由に動けるようになり、前記動作対象が固定されていることによる弊害を排除できる。 In this articulated robot, the clutch mechanism is always in the connected state. In this state, the first arm and the second arm are rotated to change the planar view position of the end effector, and the end effector operation mechanism is operated to perform either or both of rotation and attitude change of the end effector Work with the end effector. At this time, when an external force is applied to the end effector, the clutch mechanism provided in at least one of the first arm actuator, the second arm actuator, and the end effector operation mechanism actuator is brought into the disconnection state. As a result, the reverse input torque is not transmitted to the rotational drive unit of the actuator. Therefore, the operation target operated by the actuator having the clutch mechanism, that is, any of the first arm, the second arm, and the end effector operation mechanism can freely move, and the operation target is fixed. We can eliminate bad effects.
この発明において、前記エンドエフェクタ作動機構は、前記第二アームの先端に設けられた基端側部材に対して先端側部材を姿勢変更させる回転2自由度機構と、この回転2自由度機構の前記先端側部材に設けられてエンドエフェクタを1軸方向に進退させる1軸直動機構とを有し、前記エンドエフェクタ作動機構用アクチュエータは前記回転2自由度機構を作動させるものであり、このエンドエフェクタ作動機構用アクチュエータに前記クラッチ機構が設けられていてもよい。 In the present invention, the end effector operating mechanism includes a rotational two degree of freedom mechanism for changing the attitude of the distal end side member to the proximal end member provided at the distal end of the second arm, and the rotational two degree of freedom mechanism And a linear actuator mechanism provided on the distal end side member for advancing and retracting the end effector in one axial direction, and the actuator for the end effector operating mechanism operates the rotational two degree of freedom mechanism, and the end effector The clutch mechanism may be provided on the actuating mechanism actuator.
この構成であると、エンドエフェクタ作動機構として、回転2自由度機構と1軸直動機構とを有するため、回転2自由度機構によりエンドエフェクタの姿勢を任意の角度にした状態で、1軸直動機構によりエンドエフェクタを1軸方向に進退させることができる。これにより、例えば、エンドエフェクタが把持した物品を固定位置に設けられたワークの穴に挿入する作業を、1軸直動機構を作動させるだけで行うことができるため、制御が容易である。 In this configuration, since the end effector operation mechanism has a rotational two degree of freedom mechanism and a single-axis linear movement mechanism, it is possible to set the end effector's posture to an arbitrary angle by the rotational two degree of freedom mechanism. The movement mechanism can move the end effector back and forth in one axial direction. As a result, for example, the work of inserting the article gripped by the end effector into the hole of the work provided at the fixed position can be performed only by operating the one-axis linear motion mechanism, so control is easy.
エンドエフェクタの姿勢を変更する際には、エンドエフェクタ作動機構用アクチュエータをクラッチ接続状態にして、回転2自由度機構を作動させる。エンドエフェクタの位置および姿勢が決まり、1軸直動機構を作動させて物品をワークの穴に挿入する際には、エンドエフェクタ作動機構用アクチュエータをクラッチ遮断状態にして、同アクチュエータの回転駆動部へ逆入力トルクが伝達されないようにする。これにより、回転2自由度機構が、外力に応じて自由に動けるようなる。このため、1軸直動機構の構造上の問題で、物品の移動方向が穴の中心軸の方向に対して少しずれていたとしても、穴の内壁から受ける力に応じて回転2自由度機構が動くことにより前記ずれを吸収して、物品をワークの穴に挿入することができる。
このように1軸直動機構による送り方向の少しのずれを許容することができるため、1軸直動機構として、構造的に送り方向のずれが生じる可能性のある機構、例えばすべりねじ機構を使用することができる。すべりねじ機構は、比較的に軽量かつ簡素な構造であり、低コストで製作することができる。
When changing the attitude of the end effector, the actuator for the end effector operation mechanism is in a clutch connection state, and the rotation two degrees of freedom mechanism is operated. When the position and posture of the end effector are determined and the 1-axis linear motion mechanism is actuated to insert an article into the hole of the work, the actuator for the end effector actuation mechanism is in the clutch disengaged state, and to the rotary drive of the actuator Make sure that the reverse input torque is not transmitted. As a result, the rotational two degree of freedom mechanism can freely move according to the external force. For this reason, even if the moving direction of the article is slightly deviated with respect to the direction of the central axis of the hole due to the structural problem of the single-axis linear movement mechanism, the mechanism with two degrees of freedom of rotation according to the force received from By moving the object, the article can be inserted into the hole of the work by absorbing the deviation.
Thus, since a slight deviation in the feed direction due to the single-axis linear movement mechanism can be tolerated, as a single-axis linear movement mechanism, a mechanism that may cause a structural deviation in the feed direction, such as a slide screw mechanism It can be used. The slide screw mechanism is a relatively lightweight and simple structure, and can be manufactured at low cost.
前記回転2自由度機構は、前記基端側部材である基端側のリンクハブに対し前記先端側部材である先端側のリンクハブが3組以上のリンク機構を介して姿勢を変更可能に連結され、前記各リンク機構は、それぞれ前記基端側のリンクハブおよび前記先端側のリンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材とを有するパラレルリンク機構であってもよい。その場合、前記3組以上のリンク機構のうちの2組以上のリンク機構に前記基端側のリンクハブに対して前記先端側のリンクハブの姿勢を任意に変更させる前記エンドエフェクタ作動機構用アクチュエータが設けられる。 The rotation two-degree-of-freedom mechanism connects the proximal end link hub, which is the proximal end member, with the distal link hub, which is the distal end member, so that its attitude can be changed via three or more sets of link mechanisms. And each of the link mechanisms includes a proximal end and a distal end end link member rotatably connected at one end to the proximal end link hub and the distal end link hub, and the proximal end and the proximal end link member. It may be a parallel link mechanism having a center link member rotatably connected at both ends to the other end of the tip end side end link member. In that case, the actuator for the end effector operating mechanism causes the link hub on the proximal end side to arbitrarily change the posture of the link hub on the distal end side with respect to the link hub on the proximal end in two or more link mechanisms among the three or more link mechanisms. Is provided.
パラレルリンク機構は、基端側のリンクハブと、先端側のリンクハブと、3組以上のリンク機構とで、基端側のリンクハブに対し先端側のリンクハブが直交2軸回りに回転自在な2自由度機構を構成する。この2自由度機構は、コンパクトでありながら、先端側のリンクハブの可動範囲を広くとれる。このため、エンドエフェクタを任意の姿勢に変更することができる。また、パラレルリンク機構はコンパクトであるため、第一アームおよび第二アームにかかる負担が小さく、これらアームおよびその支持部の剛性を低く抑えることができる。3組以上のリンク機構のうちの2組以上のリンク機構にエンドエフェクタ作動機構用アクチュエータが設けられていると、先端側のリンクハブの姿勢を確定することができる。 The parallel link mechanism includes a proximal end link hub, a distal end link hub, and three or more sets of link mechanisms. The distal end link hub can rotate about two orthogonal axes with respect to the proximal end link hub. Constitute a two-degree-of-freedom mechanism. This two-degree-of-freedom mechanism can widen the movable range of the distal end side link hub while being compact. Therefore, the end effector can be changed to any posture. In addition, since the parallel link mechanism is compact, the load on the first arm and the second arm is small, and the rigidity of these arms and their supporting portions can be suppressed low. When the end effector operation mechanism actuator is provided in two or more link mechanisms among the three or more link mechanisms, the attitude of the distal end side link hub can be determined.
この発明の第1の多関節ロボットの操作方法は、エンドエフェクタに把持された物品を固定位置に設けられたワークの穴に挿入する場合における前記多関節ロボットの操作方法である。具体的には、前記第一アーム、前記第二アーム、および前記エンドエフェクタ作動機構を作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致し、かつ前記物品の先端が前記ワークの穴の入口付近に位置するように位置決めした後、前記エンドエフェクタ作動機構用アクチュエータの前記クラッチ機構を遮断した状態で、前記1軸直動機構を作動させて前記物品を前記ワークの穴に挿入する。 A first method of operating an articulated robot according to the present invention is the method of operating the articulated robot in a case where an article gripped by an end effector is inserted into a hole of a work provided at a fixed position. Specifically, the first arm, the second arm, and the end effector operation mechanism are operated so that the central axis of the article coincides with the central axis of the hole of the workpiece, and the tip of the article is the same. After positioning so as to be located near the entrance of the hole of the work, with the clutch mechanism of the actuator for the end effector operation mechanism shut off, the one-axis linear motion mechanism is operated to put the article into the hole of the work insert.
この多関節ロボットの操作方法によると、1軸直動機構によりエンドエフェクタを1軸方向に移動させて、エンドエフェクタに把持された物品をワークの穴に挿入する際に、クラッチ機構を遮断状態にして回転2自由度機構が自由に動けるようする。これにより、物品の移動方向が穴の中心軸の方向に対して少しずれていたとしても、穴の内壁から受ける力に応じて回転2自由度機構が動くことにより前記ずれを吸収して、物品をワークの穴に挿入することができる。 According to this operation method of the articulated robot, the end effector is moved in one axial direction by the one-axis linear motion mechanism, and the clutch mechanism is brought into the disconnected state when inserting the article gripped by the end effector into the hole of the work. Allow the two-degree-of-rotation mechanism to move freely. By this, even if the moving direction of the article is slightly deviated with respect to the direction of the central axis of the hole, the above-mentioned deviation is absorbed by the movement of the two rotational degrees of freedom mechanism according to the force received from the inner wall of the hole. Can be inserted into the hole of the work.
この発明において、前記第一アーム、前記第二アーム、および前記エンドエフェクタ作動機構の少なくともいずれか一つを昇降させる昇降機構を有し、前記第一アーム用アクチュエータおよび前記第二アーム用アクチュエータに前記クラッチ機構が設けられていてもよい。 In the present invention, it has an elevating mechanism for raising and lowering at least one of the first arm, the second arm, and the end effector operation mechanism, and the actuator for the first arm and the actuator for the second arm have the elevating mechanism. A clutch mechanism may be provided.
この構成によると、第一アームおよび第二アームを回転させてエンドエフェクタの平面視位置を決め、昇降機構によりエンドエフェクタを昇降させて作業を行う。第一アームおよび第二アームを回転作動させてエンドエフェクタの平面視位置を決めるときには、第一アーム用アクチュエータおよび第二アーム用アクチュエータの各クラッチ機構を接続状態とする。
例えば、エンドエフェクタが把持した物品を固定位置に設けられたワークの穴に挿入する作業の場合、昇降機構によりエンドエフェクタを昇降させるとき、第一アーム用アクチュエータおよび第二アーム用アクチュエータの各クラッチ機構を遮断状態にして、アクチュエータの回転駆動部へ逆入力トルクが伝達されないようにする。これにより、第一アームおよび第二アームが自由に動けるようなる。このため、何らかの理由で物品の中心軸と穴の中心軸の平面視位置とが少しずれていたとしても、穴の内壁から受ける力に応じて第一アームおよび第二アームが動くことにより前記ずれを吸収して、物品をワークの穴に挿入することができる。
According to this configuration, the first arm and the second arm are rotated to determine the planar view position of the end effector, and the lifting mechanism lifts and lowers the end effector to perform work. When the first arm and the second arm are rotationally operated to determine the planar view position of the end effector, the clutch mechanisms of the first arm actuator and the second arm actuator are brought into the connected state.
For example, in the case of an operation of inserting an article gripped by the end effector into a hole of a work provided at a fixed position, each clutch mechanism of the first arm actuator and the second arm actuator when raising and lowering the end effector by the lifting mechanism. Is turned off to prevent the reverse input torque from being transmitted to the rotary drive of the actuator. This allows the first arm and the second arm to move freely. For this reason, even if the central axis of the article and the planar view position of the central axis of the hole are slightly deviated for some reason, the deviation is caused by the movement of the first arm and the second arm according to the force received from the inner wall of the hole. Can be absorbed to insert the article into the hole of the work.
前記エンドエフェクタ作動機構の下方に、前記エンドエフェクタの作業対象となるワークを水平面に沿って一定方向に移動させるワーク搬送装置が設けられていてもよい。
ワーク搬送装置が設けられていると、ワークを作業位置まで効率良く送ることができるので、作業能率が向上する。前述のように、ワークの位置が作業位置から多少ずれていても、そのずれを吸収して作業を行うことができるため、ワーク搬送装置として、搬送精度がさほど要求されない比較的安価な装置、例えばベルトコンベア装置を使用することができる。
A work transfer device may be provided below the end effector operating mechanism to move a work to be a work target of the end effector along a horizontal surface in a predetermined direction.
Since the work can be efficiently transported to the work position when the work transfer device is provided, work efficiency is improved. As described above, even if the position of the work is slightly deviated from the work position, the work can be carried out by absorbing the deviation, so that a relatively inexpensive apparatus which does not require much conveyance accuracy as a work conveyance apparatus, for example, Belt conveyor devices can be used.
この発明の第2の多関節ロボットの操作方法は、エンドエフェクタに把持された物品を前記ワーク搬送装置で搬送されるワークの上向きの穴に挿入する場合における前記多関節ロボットの操作方法である。具体的には、前記第一アームおよび前記第二アームを作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致するように位置決めした後、前記第一アーム用アクチュエータおよび前記第二アーム用アクチュエータの各クラッチ機構を遮断した状態で、前記昇降機構を作動させて前記物品を前記ワークの穴に挿入する。 A second method of operating an articulated robot according to the present invention is the method of operating the articulated robot in a case where an article gripped by an end effector is inserted into an upward hole of a work carried by the work carrying device. Specifically, after the first arm and the second arm are actuated to position the central axis of the article so as to coincide with the central axis of the hole of the workpiece, the actuator for the first arm and the first arm With the clutch mechanisms of the two-arm actuator disconnected, the elevating mechanism is operated to insert the article into the hole of the work.
この多関節ロボットの操作方法によると、昇降機構によりエンドエフェクタを下向きに移動させて、エンドエフェクタに把持された物品をワークの穴に挿入する際に、クラッチ機構を遮断状態にして第一アームおよび第二アームが自由に動けるようにする。これにより、物品の中心軸と穴の中心軸の方向とが少しずれていたとしても、穴の内壁からの受ける力に応じて第一アームおよび第二アームが動くことにより前記ずれを吸収して、物品をワークの穴に挿入することができる。 According to the operation method of the articulated robot, the lift mechanism moves the end effector downward, and when inserting an article gripped by the end effector into the hole of the work, the clutch mechanism is disengaged to set the first arm and Allow the second arm to move freely. Thereby, even if the central axis of the article and the direction of the central axis of the hole are slightly deviated, the first arm and the second arm move according to the force received from the inner wall of the hole to absorb the deviation. , The article can be inserted into the hole of the work.
この発明の多関節ロボットは、支持体に設けられ鉛直方向の軸心回りに回転自在な第一アームと、この第一アームを回転させる第一アーム用アクチュエータと、前記第一アームの先端に設けられ鉛直方向の軸心回りに回転自在な第二アームと、この第二アームを回転させる第二アーム用アクチュエータと、前記第二アームの先端に設けられエンドエフェクタを鉛直方向の軸心回りに回転および姿勢変更のいずれか一方または両方を可能に支持するエンドエフェクタ作動機構と、このエンドエフェクタ作動機構を作動させるエンドエフェクタ作動機構用アクチュエータとを備え、前記第一アーム用アクチュエータ、前記第二アーム用アクチュエータ、および前記エンドエフェクタ作動機構用アクチュエータのうちの少なくとも一つのアクチュエータは、出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備するため、エンドエフェクタに把持された物品と固定位置に設けられたワークとを接触させて行う作業を、物品とワークとの位置ずれの影響を受けることなく、精度良く行うことができる。 The articulated robot according to the present invention comprises a first arm provided on a support and rotatable about an axis in the vertical direction, an actuator for a first arm for rotating the first arm, and a tip of the first arm. And an actuator for the second arm that rotates the second arm, and an end effector provided at the tip of the second arm about the vertical axis. And an actuator for an end effector operating mechanism for operating the end effector operating mechanism, and an actuator for the first arm, for the second arm An actuator and at least one actuator of the end effector operating mechanism actuator; In order to provide the clutch mechanism capable of interrupting the transmission of the reverse input torque applied to the output side to the rotary drive, the contact between the article gripped by the end effector and the work provided at the fixed position The work to be performed can be performed accurately without being affected by the positional deviation between the article and the work.
この発明の第1の多関節ロボットの操作方法は、エンドエフェクタに把持された物品を固定位置に設けられたワークの穴に挿入する場合における前記多関節ロボットの操作方法であって、前記第一アーム、前記第二アーム、および前記エンドエフェクタ作動機構を作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致し、かつ前記物品の先端が前記ワークの穴の入口付近に位置するように位置決めした後、前記エンドエフェクタ作動機構用アクチュエータの前記クラッチ機構を遮断した状態で、前記1軸直動機構を作動させて前記物品を前記ワークの穴に挿入することにより、物品をワークの穴に挿入させる作業を、物品とワークとの位置ずれの影響を受けることなく行わせることができる。 A first operating method of an articulated robot according to the present invention is the operating method of the articulated robot in the case where an article gripped by an end effector is inserted into a hole of a work provided at a fixed position, The arm, the second arm, and the end effector operating mechanism are operated so that the central axis of the article coincides with the central axis of the hole of the work, and the tip of the article is positioned near the entrance of the hole of the work The workpiece is positioned by operating the one-axis linear motion mechanism and inserting the article into the hole of the work while the clutch mechanism of the actuator for the end effector actuation mechanism is shut off. The work to be inserted into the hole of can be performed without being affected by the positional deviation between the article and the work.
この発明の第2の多関節ロボットの操作方法は、エンドエフェクタに把持された物品を前記ワーク搬送装置で搬送されるワークの上向きの穴に挿入する場合における前記多関節ロボットの操作方法であって、前記第一アームおよび前記第二アームを作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致するように位置決めした後、前記第一アーム用アクチュエータおよび前記第二アーム用アクチュエータの各クラッチ機構を遮断した状態で、前記昇降機構を作動させて前記物品を前記ワークの穴に挿入することにより、物品をワークの穴に挿入させる作業を、物品とワークとの位置ずれの影響を受けることなく行わせることができる。 A second method of operating an articulated robot according to the present invention is the method of operating the articulated robot in a case where an article gripped by an end effector is inserted into an upward hole of a work carried by the work carrying device. After the first arm and the second arm are actuated to position the central axis of the article so as to coincide with the central axis of the hole of the work, the actuator for the first arm and the actuator for the second arm Operation of inserting the article into the hole of the work by operating the elevating mechanism and inserting the article into the hole of the work in a state where the respective clutch mechanisms of It can be done without receiving
以下、図面と共にこの発明の実施形態を説明する。
[第1の実施形態]
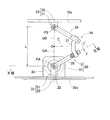
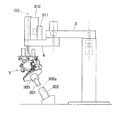
図1は第1の実施形態にかかる多関節ロボットの概略構成を示す図、図2はその平面図である。この多関節ロボット1は、天井面に固定の支持体2に設けられ鉛直方向の軸心C1回りに回転自在に支持された第一アーム3と、この第一アーム3の先端に鉛直方向の軸心C2回りに回転自在に支持された第二アーム4と、この第二アーム4の先端に鉛直方向の軸心C3回りに回転自在に支持されたパラレルリンク機構5と、このパラレルリンク機構5に搭載された1軸直動機構6とを備える。パラレルリンク機構5は、回転2自由度機構の一形態である。パラレルリンク機構5と1軸直動機構6とで、エンドエフェクタ作動機構7を構成する。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
First Embodiment
FIG. 1 is a view showing a schematic configuration of an articulated robot according to a first embodiment, and FIG. 2 is a plan view thereof. The articulated
第一アーム3は、支持体2の内部に設置された第一アーム用アクチュエータ11により軸心C1回りに回転させられる。第二アーム4は、第一アーム3の先端上面部に設置された第二アーム用アクチュエータ12により軸心C2回りに回転させられる。これら第一アーム用アクチュエータ11および第二アーム用アクチュエータ12は、減速機付きのロータリアクチュエータである。
The
パラレルリンク機構5は、パラレルリンク機構回転用アクチュエータ13によって軸心C3回りに回転させられ、かつ姿勢制御用アクチュエータ31によって作動させられる。これらパラレルリンク機構回転用アクチュエータ13および姿勢制御用アクチュエータ31は、請求項で言う「エンドエフェクタ作動機構用アクチュエータ」に相当し、いずれも出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備する。
The
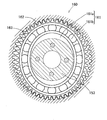
<パラレルリンク機構>
図3は、パラレルリンク機構5および姿勢制御用アクチュエータ31を示す正面図である。これらパラレルリンク機構5と姿勢制御用アクチュエータ31とでリンク作動装置30を構成する。また、図4および図5は、パラレルリンク機構5だけを取り出して表わした図であり、互いに異なる状態を示している。なお、図3〜図5では、図1に示す設置状態と上下反転して示されている。
<Parallel link mechanism>
FIG. 3 is a front view showing the
パラレルリンク機構5は、基端側のリンクハブ32に対し先端側のリンクハブ33を3組のリンク機構34を介して姿勢変更可能に連結してなる。基端側のリンクハブ32は請求項で言う「基端側部材」に相当し、先端側のリンクハブ33は「先端側部材」に相当する。なお、図3では、1組のリンク機構34のみが示されている。リンク機構34の数は、4組以上であってもよい。
The
各リンク機構34は、基端側の端部リンク部材35、先端側の端部リンク部材36、および中央リンク部材37で構成され、4つの回転対偶からなる4節連鎖のリンク機構をなす。基端側および先端側の端部リンク部材35,36はL字状をなし、一端がそれぞれ基端側のリンクハブ32および先端側のリンクハブ33に回転自在に連結されている。中央リンク部材37は、両端に基端側および先端側の端部リンク部材35,36の他端がそれぞれ回転自在に連結されている。
Each
パラレルリンク機構5は、2つの球面リンク機構を組み合わせた構造であって、リンクハブ32,33と端部リンク部材35,36の各回転対偶、および端部リンク部材35,36と中央リンク部材37の各回転対偶の中心軸が、基端側と先端側においてそれぞれの球面リンク中心PA,PB(図3)で交差している。また、基端側と先端側において、リンクハブ32,33と端部リンク部材35,36の各回転対偶とそれぞれの球面リンク中心PA,PBからの距離も同じであり、端部リンク部材35,36と中央リンク部材37の各回転対偶とそれぞれの球面リンク中心PA,PBからの距離も同じである。端部リンク部材35,36と中央リンク部材37との各回転対偶の中心軸は、ある交差角γ(図3)を持っていてもよいし、平行であってもよい。
The
図6は図3のVI−PA−VI断面図であって、同図に、基端側のリンクハブ32と基端側の端部リンク部材35の各回転対偶の中心軸O1と、中央リンク部材37と基端側の端部リンク部材35の各回転対偶の中心軸O2と、基端側の球面リンク中心PAとの関係が示されている。つまり、中心軸O1と中心軸O2とが交差する点が球面リンク中心PAである。先端側のリンクハブ33および先端側の端部リンク部材36の形状ならびに位置関係も図6と同様である(図示せず)。図の例では、リンクハブ32(33)と端部リンク部材35(36)との各回転対偶の中心軸O1と、端部リンク部材35(36)と中央リンク部材37との各回転対偶の中心軸O1と、端部リンク部材35(36)と中央リンク部材37との各回転対偶の中心軸O2とが成す角度αが90°とされているが、前記角度αは90°以外であってもよい。
6 is a cross-sectional view taken along the line VI-PA-VI of FIG. 3, in which the central axis O1 of each rotation pair of the
3組のリンク機構34は、幾何学的に同一形状をなす。幾何学的に同一形状とは、図7に示すように、各リンク部材35,36,37を直線で表現した幾何学モデル、すなわち各回転対偶と、これら回転対偶間を結ぶ直線とで表現したモデルが、中央リンク部材37の中央部に対する基端側部分と先端側部分が対称を成す形状であることを言う。図7は、一組のリンク機構34を直線で表現した図である。この実施形態のパラレルリンク機構5は回転対称タイプで、基端側のリンクハブ32および基端側の端部リンク部材35と、先端側のリンクハブ33および先端側の端部リンク部材36との位置関係が、中央リンク部材37の中心線Cに対して回転対称となる位置構成になっている。
The three sets of
基端側のリンクハブ32と先端側のリンクハブ33と3組のリンク機構34とで、基端側のリンクハブ32に対し先端側のリンクハブ33が直交2軸回りに回転自在な2自由度機構が構成される。言い換えると、基端側のリンクハブ32に対して先端側のリンクハブ33を、回転が2自由度で姿勢変更自在な機構である。この2自由度機構は、コンパクトでありながら、基端側のリンクハブ32に対する先端側のリンクハブ33の可動範囲を広くとれる。
In the proximal end
例えば、球面リンク中心PA,PBを通り、リンクハブ32,33と端部リンク部材35,36の各回転対偶の中心軸O1(図6)と直角に交わる直線をリンクハブ32,33の中心軸QA,QBとした場合、基端側のリンクハブ32の中心軸QAと先端側のリンクハブ33の中心軸QBとの折れ角θ(図7)の最大値を約±90°とすることができる。また、基端側のリンクハブ32に対する先端側のリンクハブ33の旋回角φ(図7)を0°〜360°の範囲に設定できる。折れ角θは、基端側のリンクハブ32の中心軸QAに対して先端側のリンクハブ33の中心軸QBが傾斜した垂直角度のことであり、旋回角φは、基端側のリンクハブ32の中心軸QAに対して先端側のリンクハブ33の中心軸QBが傾斜した水平角度のことである。
For example, a straight line passing through the spherical link centers PA, PB and intersecting at right angles with the central axis O1 (FIG. 6) of each rotational couple of the
基端側のリンクハブ32に対する先端側のリンクハブ33の姿勢変更は、基端側のリンクハブ32の中心軸QAと先端側のリンクハブ33の中心軸QBとの交点Oを回転中心として行われる。図4は、基端側のリンクハブ32の中心軸QAと先端側のリンクハブ33の中心軸QBが同一線上にある状態を示し、図5は、基端側のリンクハブ32の中心軸QAに対して先端側のリンクハブ33の中心軸QBが或る作動角をとった状態を示す。姿勢が変化しても、基端側と先端側の球面リンク中心PA,PB間の距離L(図7)は変化しない。
The posture change of the distal end
各リンク機構34が次の各条件を満たす場合、幾何学的対称性から基端側のリンクハブ32および基端側の端部リンク部材35と、先端側のリンクハブ33および先端側の端部リンク部材36とは同じに動く。よって、パラレルリンク機構5は、基端側から先端側へ回転伝達を行う場合、基端側と先端側は同じ回転角になって等速で回転する等速自在継手として機能する。
条件1:各リンク機構34におけるリンクハブ32,33と端部リンク部材35,36との回転対偶の中心軸O1の角度および長さが互いに等しい。
条件2:リンクハブ32,33と端部リンク部材35,36との回転対偶の中心軸O1および端部リンク部材35,36と中央リンク部材37との回転対偶の中心軸O2が、基端側および先端側において球面リンク中心PA,PBで交差する。
条件3:基端側の端部リンク部材35と先端側の端部リンク部材36の幾何学的形状が等しい。
条件4:中央リンク部材37における基端側部分と先端側部分の幾何学的形状が等しい。
条件5:中央リンク部材37の対称面に対して、中央リンク部材37と端部リンク部材35,36との角度位置関係が基端側と先端側とで同じである。
If each
Condition 1: The angles and lengths of the central axes O1 of the rotational pairs of the
Condition 2: The central axis O1 of the rotational pair of the
Condition 3: The geometrical shapes of the proximal
Condition 4: The geometrical shapes of the proximal end portion and the distal end portion of the
Condition 5: With respect to the plane of symmetry of the
図3〜図5に示すように、基端側のリンクハブ32は、基端部材40と、この基端部材40と一体に設けられた3個の回転軸連結部材41とで構成される。基端部材40は中央部に円形の貫通孔40a(図3)を有し、この貫通孔40aの周囲に3個の回転軸連結部材41が円周方向に等間隔で配置されている。貫通孔40aの中心は、基端側のリンクハブ32の中心軸QA上に位置する。各回転軸連結部材41には、軸心が基端側のリンクハブ32の中心軸QAと交差する回転軸42(図4、図5)が回転自在に連結されている。この回転軸42に、基端側の端部リンク部材35の一端が連結される。
As shown in FIGS. 3 to 5, the
図6に示すように、前記回転軸42は、2個の軸受43を介して回転軸連結部材41に回転自在に支持されている。軸受43は、例えば深溝玉軸受、アンギュラ玉軸受等の玉軸受である。これらの軸受43は、回転軸連結部材41に設けられた内径孔44に嵌合状態で設置され、圧入、接着、加締め等の方法で固定してある。他の回転対偶部に設けられる軸受の種類および設置方法も同様である。
As shown in FIG. 6, the
回転軸42には、この回転軸42と一体に回転するように、基端側の端部リンク部材35の一端と、後記軸直交型減速機77の一構成要素である扇形のかさ歯車45とが結合されている。詳しくは、基端側の端部リンク部材35の一端に切欠き部46が形成されており、この切欠き部46の両側部分である内外の回転軸支持部47,48間に回転軸連結部材41が配置される。かさ歯車45は、内側の回転軸支持部47の内側面に当接して配置される。そして、回転軸42を内側から、かさ歯車45に形成された貫通孔、内側の回転軸支持部47に形成された貫通孔、軸受43の内輪、外側の回転軸支持部48に形成された貫通孔の順に挿通し、回転軸42の頭部42aと回転軸42のねじ部42bに螺着したナット50とで、かさ歯車45、内外の回転軸支持部47,48、および軸受43の内輪をそれぞれ挟み込んでこれらを互いに結合する。内外の回転軸支持部47,48と軸受43との間にスペーサ51,52が介在させてあり、ナット50の螺着時に軸受43に予圧を付与する構成である。
The
基端側の端部リンク部材35の他端には、回転軸55が結合される。回転軸55は、2個の軸受53を介して中央リンク部材37の一端に回転自在に連結されている。詳しくは、基端側の端部リンク部材35の他端に切欠き部56が形成されており、この切欠き部56の両側部分である内外の回転軸支持部57,58間に中央リンク部材37の一端が配置される。そして、回転軸55を外側から、外側の回転軸支持部58に形成された貫通孔、軸受53の内輪、内側の回転軸支持部57に形成された貫通孔の順に挿通し、回転軸55の頭部55aと回転軸55のねじ部55bに螺着したナット60とで、内外の回転軸支持部57,58、および軸受53の内輪をそれぞれ挟み込んでこれらを互いに結合する。内外の回転軸支持部57,58と軸受53との間にスペーサ61,62が介在させてあり、ナット60の螺着時に軸受53に予圧を付与する構成である。
The rotating
図4、図5に示すように、先端側のリンクハブ33は、先端部材70と、この先端部材70の内面に円周方向等配で設けられた3個の回転軸連結部材71とで構成される。各回転軸連結部材71が配置される円周の中心は、先端側のリンクハブ33の中心軸QB上に位置する。各回転軸連結部材71には、軸心が先端側のリンクハブ33の中心軸QBと交差する回転軸73が回転自在に連結されている。この先端側のリンクハブ33の回転軸73に、先端側の端部リンク部材36の一端が連結される。先端側の端部リンク部材36の他端には、中央リンク部材37の他端に回転自在に連結された回転軸75が連結される。先端側のリンクハブ33の回転軸73および中央リンク部材37の回転軸75は、それぞれ前記回転軸42,55と同様に、2個の軸受(図示せず)を介して回転軸連結部材71および中央リンク部材37の他端にそれぞれ回転自在に連結されている。
As shown in FIGS. 4 and 5, the
図3に示すように、パラレルリンク機構5を作動させる姿勢制御用アクチュエータ31は、前記基端部材40に設置されている。姿勢制御用アクチュエータ31の出力軸31aは、基端側のリンクハブ32の中心軸QAと平行である。姿勢制御用アクチュエータ31の数は、リンク機構34と同数の3個である。
なお、この例では、リンク機構34と同数の姿勢制御用アクチュエータ31が設けられているが、3組のリンク機構34のうち少なくとも2組に姿勢制御用アクチュエータ31が設けられていれば、基端側のリンクハブ32に対する先端側のリンクハブ33の姿勢を確定することができる。
As shown in FIG. 3, an
In this example, the
姿勢制御用アクチュエータ31の出力軸31aに取り付けたかさ歯車76と基端側のリンクハブ32の前記回転軸42に取り付けられた前記扇形のかさ歯車45とが噛み合っている。これら一対のかさ歯車76,45は、入力側軸と出力側軸とが互いに直交した軸直交型減速機77を構成する。図6に示すように、姿勢制御用アクチュエータ31および軸直交型減速機77は、基端側のリンクハブ32と基端側の端部リンク部材35との回転対偶部よりも内径側に配置されている。
The
各姿勢制御用アクチュエータ31を回転駆動することで、パラレルリンク機構5が作動する。詳しくは、姿勢制御用アクチュエータ31を回転駆動すると、その回転が一対のかさ歯車76,45からなる軸直交型減速機77を介して回転軸42に伝達されて、基端側のリンクハブ32に対する基端側の端部リンク部材35の角度が変更する。それにより、基端側のリンクハブ32に対する先端側のリンクハブ33の姿勢が決まる。ここでは、軸直交型減速機77が一対のかさ歯車76,45からなるが、その他に、ウォームギヤとピニオンギヤを用いた機構、ハイポイドギヤ(商標名)を用いた機構等であってもよい。
The
<エンドエフェクタ作動機構用アクチュエータ>
パラレルリンク機構回転用アクチュエータ13および姿勢制御用アクチュエータ31として使用されるエンドエフェクタ作動機構用アクチュエータについて、図8、図9と共に詳しく説明する。
図8に示すように、エンドエフェクタ作動機構用アクチュエータは、回転駆動部である駆動モータ150を有し、この駆動モータ150のモータ軸151に、キー152により筒状の入力軸153が連結されている。そして、入力軸153の先端に、軸受154を介して出力軸155が回転自在に支持されている。出力軸155は、円板状の端面部材155aと、その背面に固定された背面側部材155bとからなる。出力軸155の背面側部材155bは、クロスローラ軸受156の内輪に結合されている。クロスローラ軸受156は、駆動モータ150のハウジングに外輪を固定して設けられている。
<Actuator for end effector operation mechanism>
The actuator for the end effector operation mechanism used as the parallel link
As shown in FIG. 8, the actuator for the end effector operating mechanism has a
入力軸153から出力軸155への動力伝達経路には、クラッチ機構230および減速機構160が設けられている。
A
クラッチ機構230は、ブレーキ板231と、ブレーキ板231の外側面と軸方向で対向するアーマチェア232と、ブレーキ板231の内側面と軸方向で対向する摩擦板233と、アーマチェア232をブレーキ板231に押し付ける複数のブレーキばね234と、コイル235aに通電することでアーマチェア232をブレーキばね234の弾力に抗してブレーキ板231から離反させる電磁石235とを備えた無励磁型電磁ブレーキである。
The
ブレーキ板231は、連結部材164の外周に回転不能に嵌め込まれている。連結部材164は、軸受165を介して入力軸151に回転自在に支持された部材である。摩擦板233と電磁石235とは、両者間に介在するスペーサ236によって所定の間隔が開けられている。
The
電磁石235のコイル235aに通電されていないときには、図8(B)のように、ブレーキばね234がアーマチェア232をブレーキ板231に押し付けることにより、アーマチェア232に押されたブレーキ板231が摩擦板233に押し付けられる。電磁石235のコイル235aに通電すると、図8(C)のように、電磁石235がアーマチェア232を吸引してブレーキばね234の弾力に抗して軸方向に移動させ、ブレーキ板231から離反させる。
When the
上記構成であるクラッチ機構230は、コイル235aに非通電であるときは、ブレーキ板231とこれに連結された連結部材164をロックして、回転不能に拘束する。すなわち、クラッチ接続状態となる。コイル235aに通電すると、ブレーキ板231および連結部材164のロックを解除して、回転自在にする。すなわち、クラッチ遮断状態となる。
When the
減速機構160は、楕円と真円の差動を利用した波動歯車機構からなる。具体的には、減速機構160は、入力軸151と回転伝達可能に連結されるウェイブジェネレータ(波動発生器)161と、このウェイブジェネレータ161の径方向外側に配されるサーキュラースプライン(剛性内歯歯車)162と、これらウェイブジェネレータ161およびサーキュラースプライン162の間に円筒部が挟まれるフレックススプライン(可撓性外歯歯車)163とからなる。
The
図9に示すように、ウェイブジェネレータ161は、径方向断面が楕円形のカム161aの外周にボールベアリング161bの内輪を嵌合固定したもので、入力軸151の大径部に回転伝達可能に連結されている。
As shown in FIG. 9, the
サーキュラースプライン162は、内周に歯が設けられた円環状の部品であり、図8に示すように、前記連結部材164に結合されている。前述のように、連結部材164はブレーキ板231に対して回転不能であるため、サーキュラースプライン162は、連結部材164を介してブレーキ板231に相対回転不能に連結されている。
The
フレックススプライン163は、金属弾性体で形成され、円筒部の外周にサーキュラースプライン162の内周の歯と噛み合う歯が設けられた薄肉カップ状の部品である。フレックススプライン163は、その蓋部で出力軸153の背面側部材155bに固定されている。
The
クラッチ機構230および減速機構160は、以下のように動作する。
クラッチ機構230のコイル235aに通電されておらずクラッチ接続状態のとき、すなわち減速機構160のサーキュラースプライン162が回転不能に拘束された状態のときに、駆動モータ150から入力軸151に入力トルクが加えられると、まず、入力軸151と一体にウェイブジェネレータ161のボールベアリング161bの内輪が回転する。すると、ボールベアリング161bの外輪に円筒部の内周を押圧されたフレックススプライン1631が、弾性変形してサーキュラースプライン162との噛合位置を変えていく。これにより、フレックススプライン163がサーキュラースプライン162との歯数の差分だけ回転し、その回転が出力軸153に伝達される。
The
When the
一方、クラッチ機構230のコイル235aに通電されたクラッチ遮断状態のとき、すなわち減速機構160のサーキュラースプライン162が回転自在に解放された状態のときに、外部から出力軸153に逆入力トルクが加えられると、まず、出力軸153と一体にフレックススプライン163が回転する。すると、サーキュラースプライン162はフレックススプライン163と一体に(フレックススプライン163との噛合位置を変えることなく)回転する。このとき、フレックススプライン163とその内周に嵌め込まれたウェイブジェネレータ161のボールベアリング161bの外輪は、停止しているボールベアリング161bの内輪の外形に沿うように弾性変形しながら回転するので、入力軸151には回転が伝達されない。そして、サーキュラースプライン162を回転自在に解放すれば、逆入力トルクに対しては、入力軸151を増速させる動作を行わなくなって、サーキュラースプライン162を回転不能に拘束している場合に比べて回転トルクが大幅に低減されるので、出力側から出力軸153を容易に回転させることができる。
On the other hand, when the clutch is in a disconnected state in which the
したがって、通常運転時(電磁石235のコイル235aに非通電の状態)は減速機構160によって高い減速率が得られる。また、駆動モータ150を停止中、電磁石235のコイル235aに通電すると、出力軸153に逆入力トルクが加えられた場合、その逆入力トルクの大きさに応じて、エンドエフェクタ動作機構であるパラレルリンク機構5が動作する。すなわち、パラレルリンク機構回転用アクチュエータ13がクラッチ遮断状態となることでパラレルリンク機構5が軸心C3回りに回転自在となり、また姿勢制御用アクチュエータ31がクラッチ遮断状態となることで先端側のリンクハブ33が自由に姿勢変更可能となる。
Therefore, at the time of normal operation (in a state where the
駆動モータ150の外側面には、駆動モータ150の回転速度を検出する入力側エンコーダ170が取り付けられている。また、出力軸155の背面側部材155bの外周に嵌合固定されたエンコーダディスク171aと、クロスローラ軸受156の外輪の外側面に固定された検出部171bとで、出力側エンコーダ(アブソリュートエンコーダ)171を構成している。
An input-
このように入力側エンコーダ170および出力側エンコーダ171を設けることにより、出力側から出力軸155を回転させた後も、出力軸155の回転方向位置を正確に検出することができる。それにより、次回に駆動モータ150を回転駆動するときに、出力軸155を精度良く位置決めすることが可能である。
By providing the
エンドエフェクタ動作用アクチュエータはフランジ部158の貫通孔158aに挿通したボルトにより、外部部材に固定される。パラレルリンク機構回転用アクチュエータ13の場合、外部部材が第二アーム4(図1)であり、出力軸155の端面部材155aにパラレルリンク機構5の基端部材40(図3)が固定される。また、姿勢制御用アクチュエータ31の場合、外部部材が基端部材40であり、出力軸155の端面部材155aにかさ歯車76(図3)が取り付けられる。この場合、出力軸155が、姿勢制御用アクチュエータ31の出力軸31aである。
The end effector operation actuator is fixed to the external member by a bolt inserted through the through
<1軸直動機構>
図1において、前記1軸直動機構6は、パラレルリンク機構5の先端側のリンクハブ33に、直動方向が先端側のリンクハブ33の中心軸QBと一致するように取り付けられている。1軸直動機構6としては、例えばすべりねじ構造のものが使用される。
<1-axis linear motion mechanism>
In FIG. 1, the one-axis
図10〜図12にすべりねじ構造からなる1軸直動機構の一例を示す。図10は1軸直動機構の断面図、図11は図10のXI−XI断面図、図12は同1軸直動機構の右側面図である。なお、図10は図11のX−O4−X断面を示している。 10 to 12 show an example of a one-axis linear motion mechanism having a slide screw structure. 10 is a cross-sectional view of the one-axis linear motion mechanism, FIG. 11 is a cross-sectional view taken along line XI-XI of FIG. 10, and FIG. 12 is a right side view of the one-axis linear motion mechanism. FIG. 10 shows a cross section taken along the line X-O 4-X in FIG.
この1軸直動機構6は、中空モータ101の回転を直線運動に変換して、スライド軸102を軸方向に進退させる。1軸直動機構6は、前記中空モータ101、ナット103、前記スライド軸102、一対の係止体104,105、および回転検出手段106を備える。
The one-axis
中空モータ101は、固定子110と、コイル111と、永久磁石112と、回転子となる中空軸113とで構成される。コイル111への通電は、図示しない制御装置により制御される。
The
固定子110は、この1軸直動機構6のハウジングをなすものであり、軸方向中央部の固定子本体114と、この固定子本体114の一方の端面に固定されたフランジ形成部材115と、固定子本体114およびフランジ形成部材115の端面にそれぞれ固定された一対の蓋116,117との組合せからなる。フランジ形成部材115および蓋116は固定ボルト118によって固定子本体114に固定され、蓋117は固定ボルト119によって固定子本体114に固定されている。
The
フランジ形成部材115は外周にフランジ部115aを有し、このフランジ部115aに、1軸直動機構6を他の機器に取り付けるための貫通孔120が設けられている。
また、蓋116,117の内周部は、スライド軸102を回転および軸方向移動自在に支持するラジアル軸受部121,122とされている。これらラジアル軸受部121,122は、樹脂でできている。
The
Further, inner peripheral portions of the
中空モータ101は、前記固定子本体114の内周に前記コイル111が配置され、このコイル111の内周に対向して前記永久磁石112が配置されている。永久磁石112は、前記中空軸113の外周面に固定されている。中空軸113の両端部は、フランジ形成部材115および固定子本体114にそれぞれ設置された一対の転がり軸受123,124によって回転自在に支持されている。
In the
ナット103は、中空軸113の内径部に固定されている。ナット103の軸方向一端側(図10の左側)には雌ねじ125が形成され、軸方向他端側(図10の右側)は、スライド軸102を回転および軸方向移動自在に支持するラジアル軸受部126とされている。例えば、ナット103は樹脂製とされ、インサート成形により金属製の中空軸113と一体化されている。ナット103の外周面に設けられた凸部103aが中空軸113の内周面に食い込んだ形状とされており、ナット103と中空軸113とが強固に一体化されている。
The
ナット103、および蓋116,117のラジアル軸受部121,122に用いる樹脂材としては、スライド軸102との優れた摺動性を有し、かつスライド軸102を構成する金属よりも硬度が低いことが求められる。このような要求を満たす樹脂材としては、例えばフッ素系樹脂組成物や超高分子量ポリエチレン樹脂組成物等が挙げられる。
The resin material used for the
フッ素系樹脂組成物は、フッ素系樹脂を主成分とする。フッ素系樹脂としては、ポリテトラルオロエチレン樹脂(略称PTFE)、テトラフルオロエチレン‐ヘキサフルオロプロピレン共重合体樹脂(略称FEP)、テトラフルオロエチレン‐パーフルオロアルキルビニルエーテル共重合体樹脂(略称PFE)、エチレン‐テトラフルオロエチレン共重合体樹脂、ポリクロロトリフルエチレン樹脂、エチレン‐クロロフルオロエチレン共重合体樹脂等が挙げられる。これらは、それぞれ単独もしくは、上記フッ素系樹脂のモノマーの例えば1:10から10:1の重合割合で、2種以上の共重合体や3元共重合体等からなる樹脂であってもよい。 The fluorine-based resin composition contains a fluorine-based resin as a main component. As a fluorine-based resin, polytetrafluoroethylene resin (abbreviated as PTFE), tetrafluoroethylene-hexafluoropropylene copolymer resin (abbreviated as FEP), tetrafluoroethylene-perfluoroalkyl vinyl ether copolymer resin (abbreviated as PFE), Examples thereof include ethylene-tetrafluoroethylene copolymer resin, polychlorotrifluethylene resin, and ethylene-chlorofluoroethylene copolymer resin. These may be resins consisting of two or more copolymers, terpolymers, etc., each alone or at a polymerization ratio of, for example, 1:10 to 10: 1 of the fluorine-based resin monomers.
スライド軸102は、ハウジングをなす固定子110よりも軸方向に長い軸であって、外周の軸方向両端間にわたって雄ねじ127が形成されている。この雄ねじ127は、ナット103の雌ねじ125に螺合している。
The
また、スライド軸102の外周には、軸方向両端間に軸方向に延びる回り止め溝128が形成されている。つまり、雄ねじ127と回り止め溝128は軸方向の同じ箇所に形成されており、雄ねじ127の周方向の一部分が回り止め溝128によって切り欠かれた状態となっている。図の例では、回り止め溝128の数が一つであるが、円周方向に分散して複数あってもよい。
Further, on the outer periphery of the
係止体104,105は、それぞれ固定ボルト130,130により蓋116,117に固定され、その先端がスライド軸102の回り止め溝128内に挿入されている。これにより、スライド軸102が回り止めされる。回り止め溝128と係止体104,105とで、前記回り止め機構を構成する。回り止め機構は、他の構成であってもよい。例えば、回り止め溝128内をボールが転動する構成としてもよい。
The locking
回転検出手段106は、中空軸113に設けられた磁気エンコーダ131と、固定子本体114に設けられた磁気センサ132とからなり、これら磁気エンコーダ131および磁気センサ132が互いに軸方向に対向している。磁気センサ132は、前記制御装置に接続されている。
The rotation detecting means 106 comprises a
この1軸直動機構6は上記構成であって、次のように動作する。
制御装置(図示せず)の制御により、コイル111が通電されると、中空モータ101の中空軸113が回転し、この中空軸113に設けられたナット103が回転する。このナット103に螺合したスライド軸102も回転しようとするが、スライド軸102は、回り止め溝128に係合した係止体104,105により回り止めされているため回転できずに、軸方向に進退する。中空軸113の回転は回転検出手段106に検出され、その検出信号が制御装置に送られる。
The one-axis
Under the control of the control device (not shown), when the
スライド軸102の雄ねじ127と回り止め溝128とが軸方向の同じ箇所に形成されているため、スライド軸102の軸方向長さを長くすることなく、十分な長さのストロークを得ることができる。また、固定子110の蓋116,117およびナット103にラジアル軸受部121,122,126が設けられているため、スライド軸102を支持するための軸受を別途に設ける必要がなく、その分だけ1軸直動機構6を軸方向にコンパクトに構成できる。
Since the
ナット103のラジアル軸受部126だけでも、スライド軸102を回転および軸方向移動自在に支持することができるが、固定子110にもラジアル軸受部121,122を設けることで、スライド軸102の支持が安定する。追加のラジアル軸受部121,122を固定子110に設けることにより、1軸直動機構6の軸方向長さを変えることなく、スライド軸102の支持の安定化を図れる。
The
ナット103が樹脂製であるため、スライド軸102に対する摺動性が良い。具体的には、ナット103の雌ねじ125とスライド軸102の雄ねじ127との摺動性が良く、かつナット103のラジアル軸受部126とスライド軸102の外周面(雄ねじ127のねじ山)との摺動性が良い。同様に、蓋116,117のラジアル軸受部121,122も樹脂製であるため、これらラジアル軸受部121,122とスライド軸102の外周面との摺動性も良い。このため、上記各摺動部に潤滑材を供給しなくてもよく、1軸直動機構6の全体構成を簡略にすることができる。
Since the
さらに、スライド軸102の回り止めをする二つの係止体104,105が、固定子における110における軸方向両端にそれぞれ設けられている。このように、軸方向に離れた複数の係止体104,105でスライド軸102の回り止めをすることにより、ナット103の回転方向が反転するときなどにガタが生じ難く、安定した動作を行うことができる。
Furthermore, two locking
スライド軸102の一端には、エンドエフェクタ取付部材140が設けられる。エンドエフェクタ取付部材140は、エンドエフェクタ取付用のねじ孔141を有し、固定ボルト142によってスライド軸102に固定される。また、スライド軸102の他端には、抜け止め用部材142が固定ボルト143によって固定されている。
At one end of the
この1軸直動機構6は、フランジ部115aの貫通孔120に挿通したボルトによって、パラレルリンク機構5の先端部材70に固定される。そして、エンドエフェクタ取付部材140に、作業内容に応じたエンドエフェクタが取り付けられる。
The one-axis
<操作方法>
次に、この多関節ロボット1の操作方法を、エンドエフェクタに把持された物品を固定位置に設けられたワークの穴に挿入する場合を例にとって説明する。図13(A),(B)は、エンドエフェクタ取付部材140に物品把持用のエンドエフェクタ300を取り付け、このエンドエフェクタ300で円柱状の物品301を把持し、その物品301を斜め姿勢で設置されたワーク302の円筒状の穴302aに挿入する作業を示している。穴302aの内径は、物品301の外径よりも少しだけ大きい。
<Operation method>
Next, an operation method of the articulated
この場合の多関節ロボット1の操作方法としては、まず図13(A)のように、第一アーム3および第二アーム4を回転させてエンドエフェクタ300の平面視位置を決めるとともに、パラレルリンク機構5を作動させてエンドエフェクタ300の姿勢を決める。エンドエフェクタ300の姿勢は、軸心C3回りの回転位置と、先端側のリンクハブ33の姿勢とによって決められる。具体的には、物品301の先端をワーク302の穴302aの出口付近に位置させ、かつ多関節ロボット1の制御上で計算によって求められる物品301の中心軸を実際の穴302aの中心軸に一致させる。パラレルリンク機構5によりエンドエフェクタ300の姿勢を決めるとき、パラレルリンク機構回転用アクチュエータ13および姿勢制御用アクチュエータ31はクラッチ接続状態になっている。
As the operation method of the articulated
エンドエフェクタ300の位置および姿勢が決まると、図13(B)のように、1軸直動機構6によりエンドエフェクタ300を移動させて、物品301をワーク302の穴302aに挿入する。その際、パラレルリンク機構回転用アクチュエータ13および姿勢制御用アクチュエータ31をクラッチ遮断状態にして、これらアクチュエータ13,31の駆動モータ150へ逆入力トルクが伝達されないようにする。これにより、パラレルリンク機構5が、外力に応じて自由に動けるようなる。このため、1軸直動機構6の構造上の問題で、物品301の中心軸D1が穴302aの中心軸D2に対して少しずれていたとしても、穴302aの内壁から受ける力に応じてパラレルリンク機構5が動くことにより前記ずれを吸収して、物品301をワーク302の穴302aに挿入することができる。
When the position and the attitude of the
このように、この多関節ロボット1は、パラレルリンク機構5によりエンドエフェクタ300の姿勢を決めた状態で、1軸直動機構6によりエンドエフェクタ300を1軸方向に進退させるため、エンドエフェクタ300が把持した物品301を固定位置に設けられたワーク302の穴302aに挿入するという難しい作業を、1軸直動機構6を作動させるだけで行うことでき、制御が容易である。
As described above, in the
また、1軸直動機構6による送り方向の少しのずれを許容することができる。このため、1軸直動機構6として、この実施形態のように、構造的に送り方向のずれが生じる可能性があるすべりねじ機構を使用することができる。すべりねじ機構は、比較的に軽量かつ簡素な構造であり、低コストで製作することができる。
In addition, a slight deviation in the feed direction by the one-axis
[第1の実施形態の変形例1]
図14は、前記実施形態に対して、第一アーム3を昇降させる昇降機構8が設けられた多関節ロボット1を示す。昇降機構8は、天井面に支持体180を固定し、この支持体180に直動アクチュエータ181をその進退方向が鉛直方向となるように設け、この直動アクチュエータ181に昇降部材182を固定してある。そして、昇降部材182に、第一アーム3が鉛直方向の軸心C1回りに回転自在に支持されている。第一アーム回転用アクチュエータ11は、昇降部材182の内部に設けられている。
なお、昇降機構8は、カバー183によって覆われている。カバー183は、天井面に固定された固定部183aと、前記昇降部材182に取り付けられ固定部材183に対して上下に摺動する昇降部183bとからなる。
[
FIG. 14 shows an articulated
The elevating
このように昇降機構8を設けると、エンドエフェクタの上下位置を任意に変えることができるため、多関節ロボット1の作業用途が広がる。他は、前記実施形態と同じである。
By providing the elevating
[第1の実施形態の変形例2]
図15は、前記実施形態とはリンク作動装置30の構成が異なる多関節ロボット1を示す。以下、前記実施形態と構成が異なる箇所についてのみ説明し、構成が同じ箇所については、図面に前記実施形態と同一符号を付して表し、その説明を省略する。
Modified Example 2 of First Embodiment
FIG. 15 shows an articulated
図16はパラレルリンク機構と姿勢制御用アクチュエータの一部を省略して示す正面図である。この実施形態のリンク作動装置30も、前記実施形態と同様に、パラレルリンク機構5と姿勢制御用アクチュエータ31とからなる。また、パラレルリンク機構5は、基端側のリンクハブ32に対し先端側のリンクハブ33が3組のリンク機構34を介して姿勢変更可能に連結されている。この実施形態のリンク作動装置30が前記実施形態と異なる点は、後述するように、各姿勢制御用アクチュエータ31が、その出力軸31aを基端側のリンクハブ32と基端側の端部リンク部材35の回転対偶部の回転軸22と軸心を一致させて配置されていることである。
FIG. 16 is a front view showing the parallel link mechanism and a part of the attitude control actuator with the part omitted. The
図17(A)は図16のXVII−PA−XVII断面図、図17(B)はその部分拡大図である。基端側のリンクハブ32の各回転軸連結部材21に回転軸22が回転自在に支持され、この回転軸22に基端側の端部リンク部材35の一端が連結されている。この実施形態の回転軸22は、大径部22a、小径部22b、および雄ねじ部22cを有し、小径部22bで2個の軸受23を介して回転軸連結部材21に回転自在に支持されている。軸受23は、例えば深溝玉軸受、アンギュラ玉軸受等の玉軸受である。これらの軸受23は、回転軸連結部21に設けられた内径溝24に嵌合状態で設置され、圧入、接着、加締め等の方法で固定されている。他の回転対偶部に設けられる軸受の種類および設置方法も同様である。
FIG. 17A is a cross-sectional view taken along line XVII-PA-XVII in FIG. 16, and FIG. 17B is a partially enlarged view thereof. The
回転軸22は、大径部22aで姿勢制御用アクチュエータ31の出力軸31aに同軸上に配置される。その配置構造については、後で説明する。また、回転軸22には、この回転軸22と一体に回転するように、基端側の端部リンク部材35の一端が連結される。すなわち、基端側の端部リンク部材35の一端に形成された切欠き部25内に回転軸連結部材21を配置し、回転軸22の小径部22bを、基端側の端部リンク部材35の一端における前記切欠き部25の両側部分である内外一対の回転軸支持部26,27にそれぞれ形成された貫通孔、および軸受23の内輪に挿通してある。そして、回転軸22の大径部22aの外周に嵌合するスペーサ28を介し、基端側の端部リンク部材35と姿勢制御用アクチュエータ31の出力軸31aとをボルト29で固定すると共に、外側の回転軸支持部27よりも突出した回転軸22の雄ねじ部22cにナット80を螺着してある。軸受23の内輪と一対の回転軸支持部26,27との間に、スペーサ81,82を介在させてあり、ナット80を螺着時に軸受23に予圧を付与する構成である。
The
姿勢制御用アクチュエータ31は、前記回転軸22と同軸上に設置され、モータ固定部材83により基端側のリンクハブ32の基端部材20の上面に固定されている。この姿勢制御用アクチュエータ31も、前記同様に、図8に示す構成のエンドエフェクタ動作機構用アクチュエータである。
The
図17(B)において、出力軸31aの先端面は、出力軸31aの中心線と直交する平面状のフランジ面84となっている。出力軸31aは、前記スペーサ28を介して、基端側の端部リンク部材35の回転軸支持部26にボルト29で接続されている。前記回転軸22の大径部22aが、基端側のリンクハブ32と基端側の端部リンク部材35の回転対偶部を構成し、この大径部22aが、出力軸31aに設けられた内径溝87に嵌っている。
In FIG. 17B, the tip end surface of the
この実施形態のリンク作動装置30を用いた場合も、前記実施形態のリンク作動装置30を用いた場合と同様の作用・効果が得られる。
また、エンドエフェクタ作動機構としては、エンドエフェクタの姿勢を変更することが可能であれば、パラレルリンク機構5以外の回転2自由度機構を採用してもよい。
Also in the case of using the
In addition, as the end effector operation mechanism, a rotational two degree of freedom mechanism other than the
[第2の実施形態]
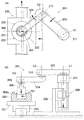
図18は第2の実施形態にかかる多関節ロボットの平面図と正面図である。この多関節ロボット201は、地面に固定の支持体202に設けられた昇降機構208と、この昇降機構208に支持され鉛直方向の軸心C1回りに回転自在に支持された第一アーム203と、この第一アーム203の先端に鉛直方向の軸心C2回りに回転自在に支持された第二アーム204と、この第二アーム204の先端に設けられ鉛直方向の軸心C3回りにエンドエフェクタを回転させるエンドエフェクタ作動機構としてのエンドエフェクタ回転機構205とを備える。エンドエフェクタ回転機構205から下方に延びる回転軸の先端に、物品把持用のエンドエフェクタ300が取り付けられている。
Second Embodiment
FIG. 18 is a plan view and a front view of the articulated robot according to the second embodiment. The articulated
第一アーム203は、支持体202の内部に設置された第一アーム用アクチュエータ211により軸心C1回りに回転させられる。第二アーム204は、第一アーム203の先端上面部に設置された第二アーム用アクチュエータ212により軸心C2回りに回転させられる。これら第一アーム用アクチュエータ211および第二アーム用アクチュエータ212は、第1の実施形態におけるエンドエフェクタ作動機構用アクチュエータと同様の図8、図9に示す構成のものであり、出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備する。
The
エンドエフェクタ回転機構205の下方には、ワーク302を水平面に沿って一定方向に移動させるワーク搬送装置220が設けられている。ワーク搬送装置220は、例えばベルトコンベア装置である。ワーク搬送装置220には、所定の間隔でワーク載せ台221が設けられ、このワーク載せ台221に載せられたワーク302を搬送する。ワーク302は、複数本の位置決めピン222によりワーク載せ台221の上に位置決めされる。
Below the end
<操作方法>
この多関節ロボット1の操作方法を、図19、図20に示すように、エンドエフェクタ300に把持された物品301をワーク搬送装置220で搬送されるワーク302の上向きの穴302aに挿入する場合を例にとって説明する。物品301は円柱状で、ワーク302の穴302aは、内径が物品301の外径よりも少しだけ大きい円筒状である。
<Operation method>
As shown in FIGS. 19 and 20, the method of operating the articulated
作業時には、第一アーム203および第二アーム204を回転作動させて、エンドエフェクタ300を所定の作業位置の上方で待機させる。その際、エンドエフェクタ300に把持されたが物品301の中心軸が、所定の作業位置Pにあるワーク302の穴302aの中心軸と一致するように位置決めする。第一アーム203および第二アーム204によりエンドエフェクタ300の平面視位置を決めるとき、第一アーム回転用アクチュエータ211および第二アーム回転用アクチュエータ212はクラッチ接続状態になっている。
In operation, the
その後、図19のように、ワーク302が作業位置まで搬送されてくると、そこで搬送を停止する。次いで、第一アーム用アクチュエータ211および第二アーム用アクチュエータ212をクラッチ遮断状態してから、昇降機構208を作動させて、第一アーム203および第二アーム204ごとエンドエフェクタ300を下降させ、物品301をワーク302の穴302aに挿入する。
Thereafter, as shown in FIG. 19, when the
前述したように、物品301の中心軸がワーク302の穴302aの中心軸と一致するように位置決めされているが、実際には、図19に図示されているように、ワーク搬送装置220の振動等により物品301とワーク302の穴302aの位置がずれる場合がある。しかし、第一アーム用アクチュエータ211および第二アーム用アクチュエータ212がクラッチ遮断状態であり、第一アーム203および第二アーム204が自由に動ける。このため、物品301の中心軸と穴302aの中心軸とが少しずれていたとしても、図20のように、穴302aの内壁からの受ける力に応じて第一アーム211および第二アーム212が動くことにより前記ずれを吸収して、物品301をワーク302の穴302aに挿入することができる。
As described above, the central axis of the
このように、ワーク302の位置が作業位置から多少ずれていても、そのずれを吸収して作業を行うことができる。このため、ワーク搬送装置220として、ワーク302の位置に対してさほど精度が要求されない比較的安価の装置、例えばベルトコンベア装置を使用することができる。
As described above, even if the position of the
以上、実施例に基づいて本発明を実施するための形態を説明したが、ここで開示した実施の形態はすべての点で例示であって制限的なものではない。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。 As mentioned above, although the form for implementing this invention based on the Example was demonstrated, the embodiment disclosed here is an illustration and restrictive at no points. The scope of the present invention is indicated not by the above description but by the claims, and is intended to include all the modifications within the meaning and scope equivalent to the claims.
1…多関節ロボット
3…第一アーム
4…第二アーム
5…パラレルリンク機構(回転2自由度機構)
6…1軸直動機構
7…エンドエフェクタ動作機構
11…第一アーム回転用アクチュエータ
12…第二アーム回転用アクチュエータ
13…パラレルリンク機構回転用アクチュエータ(エンドエフェクタ動作機構用アクチュエータ)
31…姿勢制御用アクチュエータ(エンドエフェクタ動作機構用アクチュエータ)
32…基端側のリンクハブ
33…先端側のリンクハブ
34…リンク機構
35…基端側の端部リンク部材
36…先端側の端部リンク部材
37…中央リンク部材
150…駆動モータ(回転駆動部)
203…第一アーム
204…第二アーム
208…昇降機構
211…第一アーム回転用アクチュエータ
212…第二アーム回転用アクチュエータ
230…クラッチ機構
300…エンドエフェクタ
301…物品
302…ワーク
302a…穴
C1,C2,C3…鉛直方向の軸心
1 ... articulated
6 1-axis
31 ... Actuator for attitude control (actuator for end effector operation mechanism)
32:
203
Claims (7)
前記第一アーム用アクチュエータ、前記第二アーム用アクチュエータ、および前記エンドエフェクタ作動機構用アクチュエータのうちの少なくとも一つのアクチュエータは、出力側に加えられた逆入力トルクの回転駆動部への伝達を遮断可能なクラッチ機構を具備することを特徴とする多関節ロボット。 A first arm provided on a support and rotatable about a vertical axis, a first arm actuator for rotating the first arm, and a tip provided at the tip of the first arm about a vertical axis A rotatable second arm, an actuator for the second arm for rotating the second arm, and an end effector provided at the tip of the second arm, either rotating or changing attitude around an axis in the vertical direction or An end effector operation mechanism capable of supporting both, and an actuator for the end effector operation mechanism operating the end effector operation mechanism;
At least one of the first arm actuator, the second arm actuator, and the end effector operation mechanism actuator can interrupt transmission of the reverse input torque applied to the output side to the rotational drive unit Articulated robot characterized by having a flexible clutch mechanism.
前記3組以上のリンク機構のうちの2組以上のリンク機構に前記基端側のリンクハブに対して前記先端側のリンクハブの姿勢を任意に変更させる前記エンドエフェクタ作動機構用アクチュエータが設けられている多関節ロボット。 3. The articulated robot according to claim 2, wherein the rotating two degree of freedom mechanism has three or more sets of distal end side link hubs as the distal end side members with respect to the proximal end side link hubs as the proximal end side members. At least one of the link mechanisms is connected at its one end to the proximal end link hub and the distal end link hub so as to be changeable in attitude. A parallel link mechanism comprising an end link member and a center link member rotatably coupled at its both ends to the other ends of the proximal end and distal end end link members,
The end effector operation mechanism actuator is provided to arbitrarily change the attitude of the distal end side link hub with respect to the proximal end link hub in two or more link mechanisms among the three or more sets of link mechanisms. Articulated robot.
前記第一アーム、前記第二アーム、および前記エンドエフェクタ作動機構を作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致し、かつ前記物品の先端が前記ワークの穴の入口付近に位置するように位置決めした後、前記エンドエフェクタ作動機構用アクチュエータの前記クラッチ機構を遮断した状態で、前記1軸直動機構を作動させて前記物品を前記ワークの穴に挿入する多関節ロボットの操作方法。 The method of operating an articulated robot according to claim 2 or 3, wherein the article gripped by the end effector is inserted into a hole of a work provided at a fixed position.
The first arm, the second arm, and the end effector operation mechanism are actuated so that the central axis of the article coincides with the central axis of the hole of the work, and the tip of the article is the entrance of the hole of the work An articulated robot in which the one-axis linear motion mechanism is operated to insert the article into the hole of the work in a state where the clutch mechanism of the actuator for the end effector operation mechanism is shut off after positioning so as to be located nearby How to operate
前記第一アームおよび前記第二アームを作動させて、前記物品の中心軸が前記ワークの穴の中心軸と一致するように位置決めした後、前記第一アーム用アクチュエータおよび前記第二アーム用アクチュエータの各クラッチ機構を遮断した状態で、前記昇降機構を作動させて前記物品を前記ワークの穴に挿入する多関節ロボットの操作方法。 The method for operating an articulated robot according to claim 6, wherein the article gripped by the end effector is inserted into an upward hole of a workpiece transported by the workpiece transport device,
After the first arm and the second arm are operated to position the central axis of the article so as to coincide with the central axis of the hole of the workpiece, the actuator for the first arm and the actuator for the second arm The operating method of the articulated robot which operates the raising and lowering mechanism and inserts the article into the hole of the work in a state where each clutch mechanism is shut off.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189684A JP2019063902A (en) | 2017-09-29 | 2017-09-29 | Articulated robot and its operation method |
| PCT/JP2018/036030 WO2019065873A1 (en) | 2017-09-29 | 2018-09-27 | Articulated robot and method for operating same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189684A JP2019063902A (en) | 2017-09-29 | 2017-09-29 | Articulated robot and its operation method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019063902A true JP2019063902A (en) | 2019-04-25 |
Family
ID=65903547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017189684A Pending JP2019063902A (en) | 2017-09-29 | 2017-09-29 | Articulated robot and its operation method |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2019063902A (en) |
| WO (1) | WO2019065873A1 (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6072004A (en) * | 1983-09-27 | 1985-04-24 | Kobe Steel Ltd | Control device of direct teaching type industrial robot |
| JPS61226281A (en) * | 1985-03-29 | 1986-10-08 | 三菱重工業株式会社 | Manipulator |
| JPH10225881A (en) * | 1997-02-14 | 1998-08-25 | Natl Aerospace Lab | Offset rotation joint, and articulated robot having same offset rotary joint |
| JP2001507635A (en) * | 1997-10-27 | 2001-06-12 | ファナック ロボティックス ノース アメリカ インコーポレイテッド | Robot assembly opening car door |
| JP2009078312A (en) * | 2007-09-25 | 2009-04-16 | Seiko Epson Corp | Articulated robot hand and articulated robot using the same |
| WO2009110242A1 (en) * | 2008-03-06 | 2009-09-11 | パナソニック株式会社 | Manipulator and method of controlling the same |
| JP2016147350A (en) * | 2015-02-13 | 2016-08-18 | Ntn株式会社 | Articulated robot using link actuation device |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08187687A (en) * | 1995-01-10 | 1996-07-23 | Toshiba Corp | Control device for robot and hand device for robot |
| JP5384955B2 (en) * | 2008-12-04 | 2014-01-08 | 原田電子工業株式会社 | Handle rotation operation device |
| JP6324033B2 (en) * | 2013-11-22 | 2018-05-16 | Ntn株式会社 | Link actuator |
-
2017
- 2017-09-29 JP JP2017189684A patent/JP2019063902A/en active Pending
-
2018
- 2018-09-27 WO PCT/JP2018/036030 patent/WO2019065873A1/en active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6072004A (en) * | 1983-09-27 | 1985-04-24 | Kobe Steel Ltd | Control device of direct teaching type industrial robot |
| JPS61226281A (en) * | 1985-03-29 | 1986-10-08 | 三菱重工業株式会社 | Manipulator |
| JPH10225881A (en) * | 1997-02-14 | 1998-08-25 | Natl Aerospace Lab | Offset rotation joint, and articulated robot having same offset rotary joint |
| JP2001507635A (en) * | 1997-10-27 | 2001-06-12 | ファナック ロボティックス ノース アメリカ インコーポレイテッド | Robot assembly opening car door |
| JP2009078312A (en) * | 2007-09-25 | 2009-04-16 | Seiko Epson Corp | Articulated robot hand and articulated robot using the same |
| WO2009110242A1 (en) * | 2008-03-06 | 2009-09-11 | パナソニック株式会社 | Manipulator and method of controlling the same |
| JP2016147350A (en) * | 2015-02-13 | 2016-08-18 | Ntn株式会社 | Articulated robot using link actuation device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019065873A1 (en) | 2019-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6502115B2 (en) | Articulated Robot with Link Actuator | |
| US8251863B2 (en) | Continuously variable transmission with multiple outputs | |
| US6871563B2 (en) | Orientation preserving angular swivel joint | |
| JP5675258B2 (en) | Link actuator | |
| US20080028881A1 (en) | Linkage System | |
| US20110290060A1 (en) | Robot arm assembly | |
| JP2005144627A (en) | Link operating device | |
| JP2002341076A (en) | Angle adjusting table device | |
| CN107520859B (en) | High-precision pose positioning mechanical arm | |
| JP6305076B2 (en) | Gear mechanism, transmission, and articulated robot arm | |
| JP2014097548A (en) | Rigidity variable mechanism, rigidity variable driving device and joint driving device | |
| CN109312834B (en) | Connecting rod actuating device | |
| US20210164545A1 (en) | Relative Translation System | |
| JP7089852B2 (en) | Link actuator | |
| JP2018167350A (en) | Multi joint robot | |
| JP6576646B2 (en) | Articulated robot using link actuator | |
| KR101715222B1 (en) | Robot coaxial articulation unit | |
| JP4648161B2 (en) | Double arm row type substrate transfer robot | |
| JP2005299828A (en) | Link operating device | |
| JP2019198960A (en) | Articulated robot using link operation device | |
| JP2019063902A (en) | Articulated robot and its operation method | |
| JP2004009276A (en) | Link operating device | |
| JP2019063906A (en) | Work device using parallel link mechanism | |
| JP6692626B2 (en) | Working device using parallel link mechanism | |
| JPS6253296B2 (en) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200826 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210106 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20210203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211019 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220412 |