<概要>
以下、本開示の実施形態を図面に基づいて説明する。なお、本開示において符号に付されるL及びRは、それぞれ左用及び右用を示すものである。また、本開示における平行とは、完全に平行な状態、及び略平行な状態を含む。また、本開示における垂直とは、完全に垂直な状態及び略垂直な状態を含む。また、本開示における同一とは、完全に同一な状態、及び略同一な状態を含む。なお、以下の<>にて分類された項目は、独立または関連して利用され得る。
なお、本開示における眼鏡の前方と後方、及び上方と下方は、装用者が眼鏡を装用した状態を基準とした方向である。すなわち、眼鏡の前方とはリムが位置する側であり、眼鏡の後方とはモダンが位置する側である。また、眼鏡の上方とはリムの上端側であり、眼鏡の下方とはリムの下端側である。また、本開示における眼鏡測定装置については、その奥行方向(前後方向)をZ方向、奥行方向に垂直な平面上の水平方向(左右方向)をX方向、奥行方向に垂直な平面上の鉛直方向(上下方向)をY方向として説明する。
例えば、本実施例における眼鏡測定装置(例えば、眼鏡測定装置1)は、眼鏡(例えば、眼鏡F)のフィッティング状態を検出する。また、例えば、眼鏡測定装置は、レンズ(例えば、レンズLE)の光学特性を測定する。なお、レンズの光学特性は、球面度数S、柱面度数C、乱視軸角度A、プリズム量Δ等であってもよい。
例えば、眼鏡測定装置は、レンズ測定手段(例えば、測定光学系10)を備える。また、例えば、眼鏡測定装置は、支持手段(例えば、眼鏡支持ユニット3)を備える。また、例えば、眼鏡測定装置は、測定手段(例えば、測定ユニット4)を備える。また、例えば、眼鏡測定装置は、取得手段(例えば、制御部60)を備える。また、例えば、眼鏡測定装置は、駆動部(例えば、駆動部5)を備える。また、例えば、眼鏡測定装置は、調整手段(例えば、前傾角調整機構5b、テンプル調整ユニット100)を備える。
例えば、レンズ測定手段は、調整手段によって装用状態が再現された眼鏡のレンズ特性を測定する。例えば、レンズ測定手段は、測定光をレンズに投光し、レンズ及び指標板(例えば、指標板13)を経由した測定光を受光素子(例えば、受光素子14)で受光することによって、レンズの光学特性を測定する構成であってもよい。例えば、レンズ測定手段としては、少なくとも受光素子と光源(例えば、光源11)とを備えていればよい。この場合、例えば、レンズ測定手段は、指標板を備えていてもよい。また、例えば、レンズ測定手段は、コンデンサレンズ(例えば、コンデンサレンズ12)を備えていてもよい。
例えば、支持手段は眼鏡を支持する。例えば、支持手段は、眼鏡を少なくとも2箇所以上で支持する。例えば、この場合、支持手段は、眼鏡の前方部位の位置と、眼鏡の後方部位の位置と、を含む2箇所以上を支持する構成であってもよい。例えば、眼鏡の前方部位の位置とは、装用者が眼鏡を装用した状態の中心位置よりも前方の位置であればよい。すなわち、眼鏡の前方部位の位置は、眼鏡のブリッジ(例えば、ブリッジFB)やリム(例えば、リムFR)等であってもよい。また、例えば、眼鏡の後方部位の位置とは、装用者が眼鏡を装用した状態の中心位置よりも後方の位置であればよい。すなわち、眼鏡の後方部位の位置は、眼鏡のテンプル(例えば、テンプルFT)やモダン(例えば、モダンFM)等であってもよい。
例えば、支持手段の位置には測定手段が配置されていてもよい。すなわち、測定手段は支持手段と兼用され、一体的に設けられてもよい。もちろん、測定手段は、支持手段とは別に設ける構成であってもよい。なお、例えば、測定手段としては、重量を測定することが可能な測定センサ(例えば、測定センサ4a、測定センサ4b、及び測定センサ4c)を用いることができる。例えば、このようなセンサは、圧力センサであってもよい。また、例えば、このようなセンサは、重量センサであってもよい。例えば、眼鏡の重量を測定する測定手段が、眼鏡を支持する支持手段の位置に配置されていることによって、操作者は簡易な構成で眼鏡を支持する位置における眼鏡の重量を取得することができる。
<測定手段>
例えば、測定手段は、眼鏡の少なくとも2箇所(例えば、2箇所、3箇所、4箇所等)における重量を測定する。例えば、この場合、測定手段は、眼鏡の前方部位の位置、及び眼鏡の後方部位の位置の少なくとも2箇所における重量を測定する構成であってもよい。なお、眼鏡の前方部位の位置としては、眼鏡のブリッジの位置における重量を測定してもよい。この場合、ブリッジの位置はブリッジ部分のいずれの位置であってもよく、ブリッジの中央でもよいし、ブリッジの端でもよい。また、眼鏡の後方部位の位置としては、眼鏡のモダンの位置における重量を測定してもよい。この場合、モダンの位置は、モダン部分のいずれの位置であってもよく、モダンの中央でもよいし、モダンの端でもよい。
なお、例えば、測定手段は、眼鏡のモダンの位置として、眼鏡の左側のモダンと、眼鏡の右側のモダンと、のそれぞれにおける重量を測定する構成としてもよい。また、測定手段は、眼鏡のモダンの位置として、眼鏡の左側のモダンと、眼鏡の右側のモダンと、のいずれか一方の位置における重量を測定する構成でもよい。例えば、この場合には、眼鏡を概ね左右対称とみなし、左右のモダンのうちの一方の重量と、左右のモダンのうちの他方の重量と、を略同一としてもよい。これによって、眼鏡のブリッジの位置における重量とともに、眼鏡の右側のモダンの重量と左側のモダンの重量を取得し、3点の重量から眼鏡全体の重心をより正確に求めるようにしてもよい。
<取得手段>
例えば、取得手段は、測定手段に検出された重量に基づいて、眼鏡の重心位置を取得する。例えば、取得手段は、眼鏡の重心位置を取得した後に、重心位置に基づいて眼鏡のバランス情報を取得してもよい。例えば、バランス情報とは、眼鏡のバランスの位置を示す情報であってもよい。この場合には、例えば、バランス情報は、眼鏡のバランス位置を含んでいてもよい。また、例えば、バランス情報は、眼鏡の理想的なバランス位置を含んでいてもよい。また、例えば、バランス情報は、眼鏡の平均的なバランス位置を含んでいてもよい。
なお、例えば、眼鏡測定装置は、眼鏡のバランス情報を出力する出力手段(例えば、ディスプレイ72)を備えていてもよい。例えば、出力手段は、ディスプレイ等に表示することでバランス情報を出力する構成でもよい。また、例えば、出力手段は、プリンタ等を用いて印刷することでバランス情報を出力する構成でもよい。また、例えば、出力手段は、バランス情報をデータとして外部メモリ等に出力する構成でもよい。これによって、操作者は、眼鏡の重心位置やバランス等を容易に判断できるようになる。
例えば、測定手段が眼鏡の少なくとも2箇所以上における重量を測定し、取得手段が重量に基づいて眼鏡の重心位置を取得することによって、操作者は、眼鏡全体の重心を求めることができ、眼鏡の重心位置やバランス等を調整しやすくなる。また、例えば、操作者は、眼鏡の重心から装用者に対する眼鏡のフィッティング状態を容易に判断することができ、装用者が所持する眼鏡の重心位置を調整したり、装用者に適した重心位置の眼鏡を処方したりすることができるようになる。
<調整手段>
例えば、調整手段は、眼鏡の変形と眼鏡の前傾角度との少なくともいずれかを調整し、眼鏡が装用者に装用された装用状態を再現する。もちろん、調整手段は、眼鏡の変形及び前傾角度を自動的に調整する構成でもよいし、手動で調整する構成でもよい。例えば、自動で調整する場合には、装用者の頭幅情報を取得するための頭幅取得手段(例えば、制御部60)を設けてもよい。また、例えば、自動で調整する場合には、眼鏡の前傾角度を取得するための前傾角取得手段(例えば、制御部60)を設けてもよい。例えば、手動で調整する場合には、調整手段に目盛等を設け、操作者が目盛に基づいて眼鏡の変形や前傾角度を調整してもよい。例えば、このような構成であることによって、操作者は、装用者が眼鏡を装用した装用状態を再現して、眼鏡のレンズ特性を測定することができる。従って、装用状態に近く、より精度の良い測定結果を得ることができる。
<前傾角調整手段>
例えば、調整手段は、眼鏡の前方部位の位置、及び眼鏡の後方部位の位置の少なくともいずれかの位置を上下方向に移動させることによって、前傾角度を変更する前傾角調整手段(例えば、前傾角調整機構5b)を備える。例えば、前傾角度とは、装用者が眼鏡を装用した状態における眼鏡の傾斜角度である。例えば、前傾角調整手段は眼鏡を前傾させる。これによって、装用者が眼鏡を装用した状態における眼鏡の傾斜角度(すなわち、眼鏡の前傾角度)を変更することができる。例えば、前傾角度のずれはレンズ特性に大きく影響するが、装用状態を再現することにより、測定結果を精度良く得ることができる。
例えば、前傾角調整手段は、眼鏡の前方部位の位置、及び眼鏡の後方部位の位置、の少なくともいずれかの位置を上下方向に移動させることによって、前傾角度を変更してもよい。例えば、前傾角調整手段は、眼鏡の前方部位の位置として眼鏡のブリッジ(例えば、ブリッジFB)の位置、及び眼鏡の後方部位の位置として眼鏡のテンプル(例えば、テンプルFTL、テンプルFTR)の位置の少なくともいずれかの位置を上下方向に移動させる。なお、前傾角調整手段は、眼鏡の前方部位の位置として眼鏡のブリッジの位置、眼鏡の後方部位の位置として眼鏡のモダン(例えば、モダンFML、モダンFMR)の位置の少なくともいずれかの位置を上下方向に移動させる構成であってもよい。これによって、眼鏡の前傾角度を、装用者が眼鏡を装用した装用状態における前傾角度に変更することができる。
例えば、このような構成であることによって、眼鏡の前傾角度を容易な構成で変更することができる。また、例えば、このような構成であることによって、装用者が眼鏡を装用した際に、装用者の耳の位置や眼鏡の種類等で変化する眼鏡の前傾角度を再現することができる。従って、操作者は、装用者が眼鏡を装用した装用状態の前傾角度で、レンズ特性を測定することができる。
なお、例えば、前傾角調整手段は、眼鏡のブリッジを回転中心として、テンプルの位置を上下方向に移動させるようにしてもよい。例えば、眼鏡の装用状態では、装用者の鼻に当接したブリッジが回転中心となり、装用者の耳の高さ等によって、テンプルの位置が上下方向に変化する。このため、操作者は、眼鏡のブリッジを回転中心として前傾角度を調整することで、容易に眼鏡の前傾角度を装用状態の前傾角度に合わせることができる。
また、例えば、前傾角調整手段は、前傾角取得手段を備えていてもよい。例えば、前傾角取得手段は、装用者が眼鏡を装用した際の眼鏡の前傾角情報を取得する。例えば、前傾角情報としては、眼鏡装用画像解析装置等を用いて予め測定した眼鏡の前傾角度でもよい。例えば、前傾角取得手段は、このような眼鏡の前傾角度を受信するための受信部を備え、眼鏡装用画像解析装置等から送信された前傾角情報を受信する構成でもよい。また、例えば、前傾角取得手段は、操作者が入力した眼鏡の前傾角度から前傾角情報を取得する構成でもよい。
例えば、前傾角調整手段は、前傾角取得手段によって取得された前傾角情報に基づいて、前傾角度を変更する。これによって、操作者は、複雑な操作をすることなく、容易に眼鏡の前傾角度を装用状態の前傾角度に合わせることができる。
<テンプル調整手段>
例えば、調整手段は、眼鏡の左右のテンプル(例えば、左テンプルFTL、右テンプルFTR)の少なくとも一方に当接し、左右のテンプルの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルの間の幅を変更するテンプル調整手段(例えば、テンプル調整ユニット100)を備える。なお、例えば、テンプル調整手段は、眼鏡の左右のモダン(例えば、左モダンFML、右モダンFMR)の少なくとも一方に当接し、左右のモダンの少なくとも一方のモダンの位置を移動させることによって、左右のテンプルの間の幅を変更するようにしてもよい。
例えば、テンプル調整手段は、左右のテンプルの間の幅を一定の幅に調整することが可能な構成でもよい。この場合、一定の幅は大人の平均的な頭幅や子供の平均的な頭幅としてもよい。もちろん、左右のテンプルの間の幅は、予め一定の幅に固定された構成でもよい。また、例えば、テンプル調整手段は、左右のテンプルの間の幅を可変可能な構成でもよい。この場合には、装用者ごとの頭幅に合わせて左右のテンプルの間の幅を調整することができる。なお、例えば、左右のテンプルの間の幅を変更する、とは、幅を広げる構成、幅を狭くする構成等が挙げられる。例えば、このような構成であることによって、装用者が眼鏡を装用した際に、テンプルの間の幅が広がって変形した眼鏡の形状を再現することができる。従って、操作者は、装用者が眼鏡を装用した装用状態のテンプル間の幅で、レンズ特性を測定することができる。
また、例えば、テンプル調整手段は、頭幅取得手段を備えていてもよい。例えば、頭幅取得手段は、眼鏡を装用する装用者の頭幅情報を取得する。例えば、頭幅情報としては、頭幅測定器等を用いて予め測定した装用者の頭幅でもよい。例えば、頭幅取得手段は、このような装用者の頭幅を受信するための受信部を備え、頭幅測定器等から送信された頭幅情報を受信する構成でもよい。また、例えば、頭幅取得手段は、操作者が入力した装用者の頭幅から頭幅情報を取得する構成でもよい。
例えば、テンプル調整手段は、頭幅取得手段によって取得された頭幅情報に基づいて、左右のテンプルの少なくともいずれか一方のテンプルを左右方向に移動させる。これによって、操作者は、容易にテンプルの間の幅を装用者の頭幅に調整することができる。
<実施例>
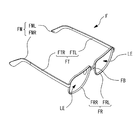
以下、本実施例における眼鏡測定装置について説明する。図1は眼鏡F(または眼鏡フレームF)を示す図である。例えば、眼鏡Fは、ブリッジFB、リムFR(左リムFRL及び右リムFRR)、テンプルFT(左テンプルFTL及び右テンプルFTR)、モダンFM(左モダンFML及び右モダンFMR)等を有し、左右リムのそれぞれにレンズLEが枠入れされている。なお、本実施例においては、眼鏡Fの前方と後方、及び上方と下方を、装用者が眼鏡Fを装用した状態を基準とした方向で説明する。すなわち、眼鏡Fの前方とはリムFRが位置する側であり、眼鏡Fの後方とはモダンFMが位置する側である。また、眼鏡Fの上方とはリムFRの上端側であり、眼鏡Fの下方とはリムFRの下端側である。
図2は眼鏡測定装置1の概略構成図である。例えば、眼鏡測定装置1は、測定部2と、眼鏡支持ユニット3と、測定ユニット4と、駆動部5と、を備える。例えば、測定部2は、眼鏡Fに枠入れされたレンズLEのレンズ特性(例えば、球面度数S、柱面度数C、乱視軸角度A、プリズム量Δ等)を測定する際の基点となるノーズピース6を有する。また、例えば、測定部2は、後述する測定光学系10を備える。
例えば、眼鏡支持ユニット3は、眼鏡Fを支持する。なお、本実施例においては、眼鏡支持ユニット3が、眼鏡Fの下方(つまり、リムFRの下端側)を上に向けた状態で、眼鏡Fを支持する。もちろん、眼鏡支持ユニット3は、眼鏡Fの上方(つまり、リムFRの上端側)を上に向けた状態で、眼鏡Fを支持してもよい。例えば、測定ユニット4は、眼鏡Fの少なくとも2箇所における重量を測定する。例えば、駆動部5は、測定部2に対して、眼鏡支持ユニット3を前後方向(Z方向)、左右方向(X方向、)及び上下方向(Y方向)に移動させる。また、例えば、駆動部5は、測定部2に対して、眼鏡支持ユニット3を斜め方向(YZ方向)に傾斜させる。
<測定光学系>
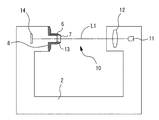
図3は、眼鏡測定装置1における光学系を示す図である。例えば、測定光学系10の光軸L1は、ノーズピース6の開口部7(直径8mmの円形状)の平面に対して垂直に配置される。例えば、測定光学系10は、光源11、コリメータレンズ12、指標板13、受光素子14、等を備える。例えば、光源11はLED(Light Emitting Diode)で構成されてもよい。例えば、コリメータレンズ12は、光源11から照射された測定光を光軸L1と平行(略平行も含む)にする。例えば、指標板13は、測定部2内にある保持部材8に保持される。例えば、指標板13には、レンズLEの光学特性を測定するための測定指標が形成されている。なお、測定指標の構成、及び測定指標を用いたレンズLEの光学特性測定については、特開2008−241694号公報を参照されたい。例えば、受光素子14は、CCD(Charge Coupled Device)、あるいはCMOS(Complementary Metal Oxide Semiconductor)で構成されてもよい。例えば、光源11から出射された測定光は様々な方向へと拡散するが、コリメータレンズ12を介することで光軸L1と平行に屈折され、ノーズピース6の開口部7、及び指標板13を通過して受光素子14に到達する。
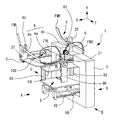
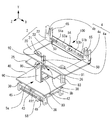
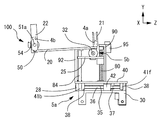
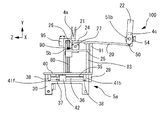
図4〜図8は、眼鏡支持ユニット3、測定ユニット4、及び駆動部5を説明するための概略構成図である。図4は眼鏡測定装置1の斜視図である。図5は眼鏡測定装置1の右側面図(図2における矢印A方向からみた図)である。図6は眼鏡測定装置1の左側面図(図2における矢印B方向からみた図)である。図7は眼鏡測定装置1の正面図(図2における矢印C方向からみた図)である。図8は眼鏡測定装置1の背面図(図2における矢印D方向からみた図)である。なお、図4〜図8においては、便宜上、測定部2の図示を省略している。以下、眼鏡支持ユニット3、測定ユニット4、駆動部5、について順に説明する。
<眼鏡支持ユニット>
例えば、眼鏡支持ユニット3は、眼鏡Fを少なくとも2箇所以上で支持する。例えば、眼鏡支持ユニット3は、基台20と、前方支持部21と、後方支持部22と、を備える。例えば、基台20には、前方支持部21が固定されている。例えば、基台20には、後方支持部22が、後述するテンプル調整ユニット100を介して設けられている。なお、後方支持部22は、テンプル調整ユニット100を介さず、基台20に直接固定されてもよい。例えば、基台20の下面にはプレート24が取り付けられており、取付軸27を中心として斜め方向(YZ方向)に前傾あるいは後傾可能となっている。
例えば、前方支持部21は、眼鏡Fの前方部位の位置を支持する。例えば、眼鏡Fの前方部位の位置とは、眼鏡FのブリッジFBやリムFR等、装用者が眼鏡Fを装用した状態の中心位置よりも前方の位置である。例えば、本実施例では、前方支持部21が、眼鏡FのブリッジFBを支持する場合を例に挙げる。例えば、前方支持部21は上方を開口したコの字形状であり、眼鏡Fの上方(つまり、リムFRの上端側)を下に向けた状態で、ブリッジFBを載置する。もちろん、眼鏡Fの下方(すなわち、リムFRの下端側)を下に向けた状態で、前方支持部21にブリッジFBを載置してもよい。
例えば、後方支持部22は、眼鏡Fの後方部位の位置を支持する。例えば、眼鏡Fの後方部位の位置とは、眼鏡FのテンプルFTやモダンFM等、装用者が眼鏡Fを装用した状態の中心位置よりも後方の位置である。例えば、本実施例では、後方支持部22が、眼鏡FのモダンFMを支持する場合を例に挙げる。例えば、後方支持部22は上方を開口したコの字形状であり、眼鏡Fの上方(つまり、リムFRの上端側)を下に向けた状態で、モダンFMを載置する。もちろん、眼鏡Fの下方(つまり、リムFRの下端側)を下に向けた状態で、後方支持部22にモダンFMを載置してもよい。
<測定ユニット>
例えば、測定ユニット4は、眼鏡Fの前方部位の位置、及び眼鏡Fの後方部位の位置の少なくとも2箇所における重量を測定する。例えば、本実施例における測定ユニット4は、眼鏡Fの前方部位の位置として、眼鏡FのブリッジFBの位置における重量を測定するとともに、眼鏡Fの後方部位の位置として、眼鏡FのモダンFMの位置における重量を測定する。なお、ブリッジFBの位置は、ブリッジFBの中央やブリッジFBの端等、ブリッジFBのいずれかの位置であればよい。また、モダンFMの位置は、モダンFMの中央やモダンFMの端等、モダンFMのいずれかの位置であればよい。
例えば、測定ユニット4は、上述した眼鏡FのモダンFMの位置として、少なくとも眼鏡Fの左モダンFMLと右モダンFMRとのそれぞれにおける重量を測定する。すなわち、本実施例における測定ユニット4は、眼鏡FにおけるブリッジFBと、左モダンFMLと、右モダンFMRと、の3箇所において、眼鏡Fの重量を測定する。例えば、左モダンFMLにおける重量は、左モダンFMLの中央や左モダンFMLの端等、左モダンFMLのいずれかの位置であればよい。同様に、例えば、右モダンFMRにおける重量は、右モダンFMRの中央や右モダンFMRの端等、右モダンFMRのいずれかの位置であればよい。なお、眼鏡FのモダンFMにおいて重量を測定する位置は、左モダンFMLと右モダンFMRとのそれぞれで異なる位置であってもよいが、左モダンFMLと右モダンFMRとのそれぞれで対称な位置であることが好ましい。
例えば、本実施例における測定ユニット4は、重量を測定することが可能な測定センサ4a、測定センサ4b、及び測定センサ4cで構成される。例えば、測定センサ4aは、眼鏡支持ユニット3における前方支持部21の位置に配置される。これにより、測定センサ4aは、眼鏡FのブリッジFBの位置における重量を測定することができる。また、例えば、測定センサ4bと測定センサ4cは、眼鏡支持ユニット3における後方支持部22の位置に配置される。これにより、測定センサ4bと測定センサ4cは、眼鏡FのモダンFMの位置における重量を測定することができる。なお、本実施例においては、測定センサ4bが眼鏡Fの左モダンFMLの位置における重量を測定し、測定センサ4cが眼鏡Fの右モダンFMRの位置における重量を測定する。すなわち、例えば、これらの測定センサは、眼鏡支持ユニット3の位置に配置され、眼鏡支持ユニット3が眼鏡Fを支持する位置において、眼鏡Fの重量を測定することができる。
例えば、重量を測定することが可能な測定センサ(すなわち、測定センサ4a、測定センサ4b、及び測定センサ4c)としては、圧力センサを用いることができる。例えば、圧力センサは、外部からの圧力を検知すると、これによって変化した電気抵抗値を電圧値に変換する。例えば、眼鏡Fの重量は、圧力センサが検出した電圧値から求められる。この場合には、電圧値を重量に変換するため演算式や換算表(テーブル)等が後述するメモリ75に記憶されていてもよい。例えば、これらの演算式や換算表は、予め実験やシミュレーション等により設定してもよい。なお、上記では重量を測定することが可能な測定センサとして圧力センサを例に挙げたが、重量センサ等を用いて眼鏡Fの重量を直接取得する構成であってもよい。
<駆動部>
例えば、駆動部5は、測定部2に対して、眼鏡支持ユニット3を前後方向(Z方向)、左右方向(X方向)、及び上下方向(Y方向)に移動させるXYZ移動機構5aと、眼鏡支持ユニット3を斜め方向(YZ方向)に傾斜させる前傾角調整機構5bと、を備える。以下、XYZ移動機構5aと前傾角調整機構5bについて順に説明する。
<XYZ移動機構>
例えば、測定部2の下部にはナット部58が固定され、X方向に伸びる送りネジ45がナット部58に螺合する。例えば、送りネジ45の両端は、ベアリングを介して基台30に連結されている。また、例えば、測定部2の下部にはボールブッシュ59が固定され、X方向に伸びるシャフト46がボールブッシュを貫通する。例えば、シャフト46の両端は基台30に連結されている。例えば、基台30の下面にはモータ49が取り付けられている。例えば、モータ49の駆動軸は送りネジ45と螺合する。
例えば、モータ49を駆動させると、送りネジ45が回転する。例えば、測定部2は固定配置されているので、ナット部58によって送りネジ45が送られると、送りネジ45とともに基台30が左右方向(X方向)に移動する。例えば、このとき、シャフト46はボールブッシュ59内を摺動する。例えば、眼鏡支持ユニット3は、このように基台30を移動させることにより、測定部2に対して左右方向に移動させることができる。
例えば、基台30の上面には、軸受支持部材が固定されている。例えば、軸受支持部材は、基台30の上面前方に位置する軸受支持部材41fと、基台30の上面後方に位置する軸受支持部材41bと、で構成される。例えば、軸受支持部材41fにはベアリング43が設けられ、Z方向に伸びる送りネジ35の一端がベアリング43に連結する。例えば、軸受支持部材41bにもベアリングが設けられ、これに送りネジ35が貫通する。例えば、送りネジ35の他端はモータ28の駆動軸と連結する。例えば、モータ28は軸受支持部材41bに固定されている。
また、例えば、基台30の上面には、ボールブッシュ支持部材42が固定されている。例えば、ボールブッシュ支持部材42にはボールブッシュが設けられ、Z方向に伸びるシャフト36がボールブッシュに貫通している。
例えば、基台40の下面には、ナット支持部材37と、シャフト支持部材38と、が固定されている。例えば、ナット支持部材37にはナット部が設けられており、このナット部は送りネジ35と螺合する。例えば、シャフト支持部材38にはボールブッシュが設けられており、このボールブッシュにはシャフト36が貫通する。
例えば、モータ28を駆動させると、送りネジ35が回転する。これによって、ナット支持部材37のナット部が送りネジ35に送られ、ナット支持部材37、及びナット支持部材37が固定された基台40が前後方向(Z方向)に移動する。例えば、このとき、基台40の移動にともなって、基台40に固定されたシャフト支持部材38は、シャフト36上を摺動する。例えば、送りネジ35がモータ28により回転しても、ベアリング43によって基台30にはモータ28の駆動が伝達されず、基台30は前後方向(Z方向)に移動しない。例えば、眼鏡支持ユニット3は、このように基台40を移動させることにより、測定部2に対して前後方向に移動させることができる。
例えば、基台25はナット部を有し、Y方向に伸びる送りネジ80がこのナット部に螺合する。また、例えば、基台25はボールブッシュを有し、Y方向に伸びるシャフト83とシャフト84とのそれぞれが、このボールブッシュを貫通する。例えば、送りネジ80の一端は、基台40に設けられたベアリングを介して、基台40に連結される。例えば、送りネジ80の他端は、取付板90に設けられたベアリングを介して、取付板90に連結される。例えば、シャフト83の一端は、基台40に設けられたボールブッシュを介して、基台40に連結される。例えば、シャフト83の他端は、取付板91に設けられたボールブッシュを介して、取付板91に連結される。同様に、例えば、シャフト84の一端は、基台40に設けられたボールブッシュを介して、基台40に連結される。例えば、シャフト84の他端は、取付板92に設けられたボールブッシュを介して、取付板92に連結される。例えば、取付板90には、モータ95が固定されている。例えば、モータ95の駆動軸は、送りネジ80と螺合する。
例えば、モータ95を駆動させると、送りネジ80が回転する。これによって、基台25のナット部が送りネジ80に送られるので、基台25は上下方向(Y方向)に移動する。例えば、このとき、基台25の移動にともなって、基台25のボールブッシュはそれぞれシャフト83及びシャフト84上を摺動する。例えば、送りネジ80がモータ95により回転しても、基台40にはベアリングによってモータ95の駆動が伝達されず、基台40及び基台30は上下方向(Y方向)に移動しない。例えば、眼鏡支持ユニット3は、このように基台25を移動させることによって、測定部2に対して上下方向に移動させることができる。
<前傾角調整機構>
例えば、前傾角調整機構5bは、眼鏡Fの前方部位の位置、及び眼鏡Fの後方部位の位置の少なくともいずれかの位置を上下方向に移動させることで、眼鏡Fの傾斜角度を変更する。例えば、本実施例における前傾角調整機構5bは、眼鏡Fの前方部位の位置として眼鏡FのブリッジFBの位置、眼鏡Fの後方部位の位置として眼鏡FのテンプルFTの位置、の少なくともいずれかの位置を上下方向に移動させ、眼鏡Fの傾斜角度を変更する。なお、眼鏡FのテンプルFTの位置には、テンプルFT及びモダンFMの位置が含まれる。
例えば、前傾角調整機構5bにより眼鏡Fの傾斜角度を変更する構成としては、眼鏡FのブリッジFBを回転中心として、テンプルFTの位置を上下方向に移動させてもよい。あるいは、眼鏡FのブリッジFBまたはテンプルFTの少なくとも一方の位置を上下方向に移動させてもよい。なお、本実施例においては、前傾角調整機構5bを用いて、眼鏡FのブリッジFBを回転中心として、眼鏡Fの傾斜角度を変更する構成を例に挙げて説明する。
例えば、前傾角調整機構5bは、プレート24、プレート26、取付軸27、モータ32、等を備える。例えば、プレート24は基台20の下面に取り付けられており、プレート26は基台25の上面に取り付けられている。例えば、取付軸27は、プレート24と、プレート26が有するベアリングを貫通する。例えば、取付軸27の一端にはモータ32が取り付けられている。例えば、モータ32は基台25上に固定されている。例えば、取付軸27と、プレート24と、は図示なきビスにより固定されている。このため、例えば、モータ32を駆動すると、取付軸27が回転するとともに、プレート24が取付軸27を中心に傾斜する。例えば、支持ユニット3が備える基台20は、このようにして斜め方向(YZ方向)に傾斜させることができる。なお、本実施例においては、基台20に取り付けられたプレート24、及び基台25に取り付けられたプレート26が前方支持部21の真下に位置する。このため、眼鏡支持ユニット3に眼鏡Fを載置した状態では、眼鏡FのブリッジFBを回転中心として、基台20が斜め方向に傾斜するとみなすことができる。
例えば、モータ32の駆動方向を切り換えると、基台20の傾斜方向が変更される。例えば、モータ32が時計回りに回転した場合、基台20は取付軸27を中心として上方向(言い換えると、前方支持部21が後方支持部22よりも高くなる方向)に傾斜する。また、例えば、モータ32が反時計回りに回転した場合、基台20は取付軸27を中心として下方向(言い換えると、前方支持部21が後方支持部22よりも低くなる方向)に傾斜する。なお、モータ32の駆動方向に対する基台20の傾斜方向は、本実施例とは異なる構成であってもよい。例えば、このように基台20が傾斜することで、眼鏡支持ユニット3が眼鏡Fを支持した状態では、基台20の傾斜にともない眼鏡Fの傾斜角度を変更することができる。
なお、例えば、本実施例における眼鏡測定装置1は、装用者が眼鏡Fを装用した際の前傾角情報を取得するための構成を備えていてもよい。例えば、この場合には、操作者が眼鏡測定装置1に設けられた操作ボタン71から、別の装置(例えば、特開2015−179254号公報に記載の眼鏡装用画像解析装置等)を用いて予め測定しておいた眼鏡Fの前傾角度を入力する構成でもよい。また、例えば、この場合には、別の装置が取得した眼鏡Fの前傾角度を、眼鏡測定装置1が受信する構成でもよい。例えば、前傾角調整機構5bは、このようにして取得した前傾角情報に基づいて、眼鏡Fの前傾角度を変更する。より詳細には、例えば、後述する制御部60が前傾角情報に基づいてモータ32の駆動量を制御することで、基台20を傾斜させる角度を変更し、眼鏡Fの前傾角度を自動的に調整する。
<テンプル調整ユニット>
例えば、本実施例における眼鏡測定装置1は、眼鏡FにおけるテンプルFT間の幅を変更するためのテンプル調整ユニット100を備えていてもよい。例えば、テンプル調整ユニット100は、眼鏡Fにおける左テンプルFTL及び右テンプルFTRの少なくとも一方に当接し、左右のテンプルの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルの間の幅Wを変更する。例えば、本実施例では、テンプル調整ユニット100が、左テンプルFTLと右テンプルFTRの双方に当接し、左右のテンプルの双方の位置を移動させることによって、左右のテンプル間の幅を変更する場合を例に挙げる。
例えば、テンプル調整ユニット100は、当接部、ガイド部50、送りネジ部51a、送りネジ部51b、送りネジシャフト53a、送りネジシャフト53b、両軸モータ54、等を備える。例えば、当接部は、眼鏡Fにおける後方部位の位置の少なくとも一部に当接する。なお、本実施例においては、眼鏡支持ユニット3が備える後方支持部22が、テンプル調整ユニット100における当接部を兼ねている。例えば、ガイド部50は基台20に設けられ、後方支持部22を摺動可能に保持する。例えば、後方支持部22には、後方支持部22が有するナット部を介して、送りネジ部51aと送りネジ部51bの一端がそれぞれ螺合する。例えば、送りネジ部51aの他端には、送りネジシャフト53aが固定されている。また、例えば、送りネジ部51bの他端には、送りネジシャフト53bが固定されている。例えば、送りネジ部51aは右ネジに加工され、送りネジ部51bは左ネジに加工されている。例えば、両軸モータ54には送りネジシャフト53aと送りネジシャフト53bとが連結する。
例えば、両軸モータ54を駆動させると、送りネジシャフト53a及び送りネジシャフト53bが回転し、これにともなって送りネジ部51aと送りネジ部51bも回転する。このため、例えば、後方支持部22のナット部はそれぞれの送りネジ部に送られ、後方支持部22はガイド部50に沿って左右方向(X方向)に摺動する。なお、送りネジ部51aと送りネジ部51bとは、それぞれネジの回転方向が異なるため、両軸モータ54が回転する方向を切り換えることによって、後方支持部22が互いに近づく方向、あるいは互いに遠ざかる方向へ移動する。例えば、本実施例においては、両軸モータ54が時計回りに回転すると、後方支持部22が互いに遠ざかる。また、例えば、両軸モータ54が反時計回りに回転すると、後方支持部22が互いに近づく。もちろん、両軸モータ54の回転方向に対する後方支持部22の移動方向は、本実施例とは異なっていてもよい。これによって、眼鏡支持ユニット3が備える後方支持部22間の幅W(図7及び図8参照)が変更される。すなわち、眼鏡支持ユニット3が眼鏡Fを支持した状態では、後方支持部22間の幅Wの変更にともない、眼鏡FにおけるテンプルFT間の幅を変更することができる。例えば、装用者が眼鏡を装用すると眼鏡の形状は変形するが、左右のテンプルの間の幅を変更することで、その変形状態を再現することができる。
なお、例えば、本実施例における眼鏡測定装置1は、眼鏡Fを装用する装用者の頭幅情報を取得するための構成を備えていてもよい。例えば、この場合には、操作者が眼鏡測定装置1に設けられた操作ボタン71から、別の装置(例えば、頭幅測定器等)を用いて予め測定しておいた装用者の頭幅を入力する構成でもよい。また、例えば、この場合には、別の装置が取得した装用者の頭幅を、眼鏡測定装置1が受信する構成でもよい。例えば、テンプル調整ユニット100は、このようにして取得された頭幅情報に基づいて、左右の当接部(本実施例においては後方支持部22)の少なくともいずれか一方の当接部を左右方向に移動させる。より詳細には、例えば、後述する制御部60が頭幅情報に基づいて両軸モータ54の駆動量を制御することで、後方支持部22が左右方向に移動し、後方支持部22間の幅Wが自動的に調整される。
なお、例えば、眼鏡測定装置1が装用者の頭幅情報を取得するための構成を備える場合には、後方支持部22に、眼鏡Fが装用者の頭を把持する把持力を検出するためのセンサ65を設けてもよい。例えば、このようなセンサには、圧力センサを用いることができる。例えば、この場合には、後述する制御部60が、圧力センサに検出された電圧値から、眼鏡Fが装用者の頭を把持する把持力を求める。例えば、電圧値を把持力に変換するため演算式や換算表(テーブル)等は、予め実験やシミュレーション等により後述するメモリ75に記憶されていてもよい。例えば、これによって、装用者に適した眼鏡Fを処方する際に、装用者が眼鏡Fを装用した状態で頭にかかる把持力を参考にすることができる。
<制御部>
図9は、眼鏡測定装置1における制御系を示す図である。例えば、制御部60には、操作ボタン71、ディスプレイ72、光源11、受光素子14、駆動部5が備えるモータ(例えば、両軸モータ54、モータ49、モータ28、モータ32、モータ95等)、等が接続されている。また、例えば、制御部60には、眼鏡フレーム形状測定ユニット7、及びカップ取付け機構8がそれぞれ有する図示なきモータや駆動機構等が接続されている。
例えば、制御部60は、CPU(プロセッサ)、RAM、ROM等を備える。例えば、CPUは、眼鏡測定装置1における各部材の駆動を制御する。また、例えば、CPUは、各種の演算処理(例えば、眼鏡Fの重心位置、眼鏡Fの把持力等)を行う。例えば、RAMは、各種の情報を一時的に記憶する。例えば、ROMには、CPUが実行するプログラム等が記憶されている。なお、制御部60は、複数の制御部(つまり、複数のプロセッサ)によって構成されてもよい。
例えば、メモリ75は、電源の供給が遮断されても記憶内容を保持できる非一過性の記憶媒体である。例えば、メモリ75としては、ハードディスクドライブ、フラッシュROM、及び眼鏡測定装置1に着脱可能に装着されるUSBメモリ等を使用することができる。例えば、メモリ75には、電圧値を重量に変換するため演算式あるいは換算表等が記憶される。
<制御動作>
上記の構成を備える眼鏡測定装置1について、その制御動作を説明する。例えば、眼鏡測定装置1は、眼鏡Fの重心位置を取得するための重心取得モードと、装用状態が再現された眼鏡Fのレンズ特性を測定するためのレンズ測定モードと、を備える。なお、重心取得モードとレンズ測定モードは、自動で切り換わって連続的に設定される構成でもよいし、手動で別々に設定する構成としてもよい。
<重心取得モード>
以下、重心取得モードについて詳細に説明する。まず、操作者は、眼鏡支持ユニット3の前方支持部21及び後方支持部22に眼鏡Fを載置する。例えば、前方支持部21に設けられた測定センサ4aは、眼鏡支持ユニット3にかかる圧力の変化を検知することにより、眼鏡FのブリッジFBにおける重量を測定する。また、例えば、後方支持部22に設けられた測定センサ4bと測定センサ4cは、眼鏡支持ユニット3にかかる圧力の変化を検知することにより、眼鏡Fの左モダンFMLと右モダンFMRのそれぞれにおける重量を測定する。例えば、眼鏡Fの各部位における重量は、制御部60のメモリ75に記憶される。
例えば、制御部60は、眼鏡FのブリッジFB、左モダンFML、及び右モダンFMRのそれぞれにおける重量に基づいて、眼鏡Fの重心位置Gを取得する。図10は眼鏡Fの重心位置Gを説明する図である。図10(a)は眼鏡Fの側面図を示す。図10(b)は眼鏡Fの正面図を示す。図10(c)は眼鏡Fの斜視図を示す。なお、例えば、眼鏡Fの重心位置を取得する際には、リムFRの前面からモダンFMの先端までの距離D1と、左リムFRLの左端から右リムFRRの右端までの距離D2と、がそれぞれ必要になる。このため、操作者は、ディスプレイ72に表示された操作ボタン71を用いて、このような距離D1と距離D2を入力するようにしてもよい。例えば、距離D1と距離D2は、眼鏡Fのテンプル内側に表記された眼鏡のサイズを示す数字をもとに判断してもよいし、定規等を利用して測定してもよい。
例えば、眼鏡Fの重心位置Gは、眼鏡Fの奥行方向(図10のZ方向)においてバランスが取れる位置と、眼鏡Fの左右方向(図10のX方向)においてバランスが取れる位置と、の2つの方向に対するバランス位置から求めることができる。例えば、眼鏡Fの奥行方向におけるバランス位置Mzは、次の数式により算出することができる。
上記の数式において、F1は眼鏡FのブリッジFBにおける重量である。F2は眼鏡Fの左モダンFMLにおける重量である。F3は眼鏡Fの右モダンFMRにおける重量である。d1は眼鏡Fの右リムFRRからバランス位置Mzまでの距離である。なお、距離d1は眼鏡Fの左リムFRLからバランス位置Mzまでの距離としてもよい。
例えば、制御部60は、上記の数式を計算することによって、奥行方向のバランス位置を検出することができる。すなわち、眼鏡Fの奥行方向に対して、眼鏡FをリムFRの方向(図10(a)における矢印a方向)に回転させようとする力と、眼鏡FをモダンFMの方向(図10(a)における矢印b方向)に回転させようとする力と、が等しくなる位置が、奥行方向のバランス位置Mzとして検出される。例えば、これによって、制御部60は眼鏡Fの重心位置GにおけるZ方向の位置を求めることができる。すなわち、眼鏡Fの重心位置Gは、そのZ座標がMzとなる。
また、例えば、眼鏡Fの左右方向におけるバランス位置Mxは、次の数式により算出することができる。
上記の数式において、d2は眼鏡Fの左リムFRLの左端からバランス位置Mxまでの距離である。
例えば、制御部60は、上記の数式を計算することによって、左右方向のバランス位置を検出することができる。すなわち、眼鏡Fの左右方向に対して、眼鏡Fを左リムFRLの方向(図10(b)における矢印c方向)に回転させようとする力と、眼鏡Fを右リムFRRの方向(図10(b)における矢印d方向)に回転させようとする力と、が等しくなる位置が、左右方向のバランス位置Mxとして検出される。例えば、これにより、制御部60は眼鏡Fの重心位置GにおけるX方向の位置座標を求めることができる。すなわち、眼鏡Fの重心位置Gは、そのX座標がMxとなる。
例えば、制御部60は、上記のように取得したバランス位置Mxとバランス位置Mzとから、眼鏡Fの重心位置Gを求める。例えば、重心位置GのX方向における位置座標はバランス位置Mxの位置であり、重心位置GのZ方向における位置座標はバランス位置Mzの位置である。このため、眼鏡Fの重心位置Gの位置座標は(Mx,Mz)と表すことができる。すなわち、図10(c)においては、眼鏡Fの奥行方向に対するバランス位置Mzと、左右方向に対するバランス位置Mxと、が一致する点が眼鏡Fの重心位置Gとして検出される。
なお、例えば、制御部60は、眼鏡Fの重心位置Gを取得した後に、眼鏡Fの重心位置Gをディスプレイ72に表示してもよい。この場合には、上述の数式により求められた距離d1と距離d2の数値を表示してもよい。また、例えば、制御部60は、眼鏡Fの重心位置Gから求めた眼鏡Fのバランス情報をディスプレイ72に表示するようにしてもよい。例えば、バランス情報としては、眼鏡Fのバランスの位置を示すための情報が表示される。
図11はバランス情報の一例を示す図である。例えば、バランス情報としては、眼鏡Fを模したイラスト120、眼鏡Fのバランス位置を示すマーク121、眼鏡の平均的なバランス位置を示すマーク122、等が示される。もちろん、眼鏡Fの重心位置G等をバランス情報としてディスプレイ72に表示してもよい。例えば、眼鏡の平均的なバランス位置は、眼鏡Fの種類(例えば、メタルフレームやセルフレーム等)ごとに、予め実験やシミュレーション等から設定されていてもよい。例えば、マーク122は、選択された眼鏡の種類に応じて、その平均的な位置に表示される。なお、本実施例におけるマーク122は、眼鏡の平均的なバランス位置を示すものとしたがこれに限定されない。例えば、マーク122は、眼鏡の理想的なバランス位置を示すものであってもよい。
例えば、このようにバランス情報を表示する場合、制御部60は、眼鏡Fのバランス位置に対して、平均的なバランス位置がどれだけずれているかを数値として示してもよい。また、例えば、このようにバランス情報を表示する場合、制御部60は、眼鏡Fのバランス位置と、平均的なバランス位置と、のずれ量から、眼鏡Fのバランス位置を移動させるか否かを判定してもよい。例えば、平均的なバランス位置を基準とした所定の範囲123は、バランス位置の適否を判定するための許容範囲として設定されていてもよい。例えば、バランス位置を移動させる必要があると判定された場合には、眼鏡Fのバランス位置を移動させることを促すための文章をディスプレイ72に表示してもよい。
例えば、操作者は、バランス情報を取得することで、装用者に対して装用感のよい眼鏡を処方することができるようになる。例えば、操作者は、装用者から眼鏡が鼻からずり落ちやすいとの意見があった際に、装用者が現在装用している眼鏡に対して、上述のようにバランス情報を取得する。例えば、装用者の現在の眼鏡に対する装用感を改善する場合、操作者は、バランス情報に基づいて眼鏡に付加する重りの重さを決定してもよい。なお、眼鏡に付加する重りの重さは、現在の眼鏡のバランス位置と、平均的なバランス位置(あるいは、理想的なバランス位置)と、が一致するように、制御部60が算出する構成でもよい。次いで、操作者は、装用者の現在の眼鏡に重りを付加し、再度バランス情報を取得する。例えば、操作者は、このような操作を繰り返すことで、現在の眼鏡におけるバランス位置と、平均的なバランス位置と、を合わせることができ、眼鏡の装用感を改善することができる。もちろん、装用者の装用感によっては、現在の眼鏡におけるバランス位置と、平均的なバランス位置と、を必ずしも一致させなくてもよい。
また、例えば、装用者が装用する予定の眼鏡に対する装用感を改善する場合、操作者は、装用予定の眼鏡に対して同様にバランス情報を取得する。例えば、操作者は、装用者の現在の眼鏡と、装用予定の眼鏡と、のバランス情報を比較して、装用予定の眼鏡のバランス位置が、現在の眼鏡のバランス位置よりも後方(すなわち、眼鏡のモダンFM側)にある眼鏡の使用を提案してもよい。これによって、操作者は、眼鏡の装用感を考慮し、鼻からずり落ちにくい眼鏡を装用者に処方することもできる。
以上説明したように、例えば、本実施例における眼鏡測定装置は、眼鏡の少なくとも2箇所以上における重量を測定し、測定した重量に基づいて眼鏡の重心位置を取得する。これによって、操作者は、装用者が所持する眼鏡の重心位置を調整したり、装用者に適した重心位置の眼鏡を処方したりすることができ、装用者に対する眼鏡のフィッティング状態を容易に判断することができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡の前方部位の位置、及び眼鏡の後方部位の位置の少なくとも2箇所における重量を測定する。これによって、枠入れされたレンズの厚みや重さが影響する眼鏡の前方部位の位置と、眼鏡の後方部位と、の重量を取得して眼鏡全体の重心を求めることができ、眼鏡の重心位置やバランス等を調整しやすくなる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡のモダンの位置として、眼鏡の左側のモダンと、眼鏡の右側のモダンと、のそれぞれにおける重量を測定する。これによって、眼鏡のブリッジの位置における重量とともに、眼鏡の右側のモダンの重量と左側のモダンの重量を取得することができ、3点の重量を用いて眼鏡全体の重心をより正確に求めることができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡の重量を測定する測定手段が、眼鏡を支持する支持手段の位置に配置されている。このため、操作者は、簡易な構成で、眼鏡を支持する位置における眼鏡の重量を取得することができる。
また、例えば、本実施例において、取得手段は、眼鏡の重心位置に基づいて眼鏡のバランス位置を示すバランス情報を取得してもよい。また、例えば、眼鏡測定装置は、バランス情報を出力する出力手段を備えてもよい。これによって、操作者は、眼鏡の重心位置やバランス等を容易に判断できるようになる。
<レンズ測定モード>
以下、レンズ測定モードについて詳細に説明する。図12は装用者が眼鏡Fを装用した装用状態を示す図である。図12(a)は装用者を正面からみた図であり、図12(b)は装用者を側面からみた図である。例えば、装用者の瞳孔位置PからリムFRの下部までの距離(すなわち、眼のPD高さh)、装用者の左眼の瞳孔位置から右眼の瞳孔位置までの距離(すなわち、瞳孔間距離PD)、装用者の角膜頂点位置Kからレンズ裏面までの距離(すなわち、角膜頂点距離VD)、リムFRがY方向に対して傾斜する角度(すなわち、前傾角度θ)、等には個人差があり、装用者によって異なる。もちろん、眼鏡Fの形状は様々であるため、眼のPD高さh、角膜頂点距離VD、前傾角度θ、等は眼鏡Fによっても変化することがある。このため、例えば、他覚検査や自覚検査等により処方値が求められ、装用者に対して球面度数Sが−10Dのレンズを処方することが望ましいとの結果を得て作製された眼鏡であっても、上述の距離や傾斜角度が変化して、実際には−10Dのレンズを眼前に置いた状態でみえていない場合がある。
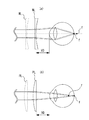
上記について、角膜頂点距離VDの変化を例に挙げて説明する。図13は角膜頂点距離VDと屈折力の関係を示す図である。図13(a)はマイナスレンズの例であり、図13(b)はプラスレンズの例である。例えば、マイナスレンズMLを眼前に配置した状態では、角膜頂点距離VDが長くなるほど(すなわち、実線のマイナスレンズMLから点線のマイナスレンズML側に移動するほど)、眼に入射する平行光束の焦点位置fは、網膜よりも奥に位置するようになる。このため、装用者がマイナスレンズMLを介して前方をみた場合には、実際の視力矯正が小さくなる。すなわち、例えば、−10Dのレンズが枠入れされた眼鏡Fをかけていても、角膜頂点距離VDがずれてしまうと、装用者は−10Dよりも弱いレンズ(例えば、−9.5Dのレンズ)を通して前方をみている状態と同じになる。
逆に、プラスレンズPLを眼前に配置した状態では、角膜頂点距離VDが長くなるほど(すなわち、実線のプラスレンズPLから点線のプラスレンズPL側に移動するほど)、眼に入射する平行光束の焦点位置fは、網膜よりも手前に位置するようになる。このため、装用者がプラスレンズPLを介して前方をみた場合には、実際の視力矯正が過剰になる。すなわち、例えば、+10Dのレンズが枠入れされた眼鏡Fをかけていても、角膜頂点距離VDがずれてしまうと、装用者は+10Dよりも強いレンズ(例えば、+10.5Dのレンズ)を通して前方をみている状態と同じになる。
例えば、角膜頂点距離VDが変化すると、上述のように実際の屈折力が変化してしまう。このため、見え具合が良好な眼鏡Fを処方するためには、眼鏡Fを装用した装用者が、眼鏡Fに枠入れされたレンズLEを介して前方をみた場合の屈折力を取得することが望ましい。
例えば、本実施例における眼鏡測定装置1は、レンズ測定モードを設定することで、装用状態の屈折力を測定することができる。例えば、この場合には、装用者が眼鏡Fを装用して正面をみた場合に、左眼の視軸が左眼用のレンズLEを通過する点と、右眼の視軸が右眼用のレンズLEを通過する点と、のそれぞれにおける屈折力を測定する。例えば、このとき、制御部60は、眼鏡Fのレンズ裏面にノーズピース6を当接させず、装用者の角膜頂点距離VDに基づいてノーズピース6を配置する。もちろん、眼鏡測定装置1は、レンズLEの裏面にノーズピース6を当接させ、眼鏡Fに枠入れされたレンズLEの光学特性を測定することも可能である。
例えば、操作者は、眼鏡支持ユニット3の前方支持部21及び後方支持部22に眼鏡Fを載置する。例えば、このとき、前方支持部21と、測定部2と、は左右方向(X方向)が同位置となるように予め設定されている。
次いで、操作者は、ディスプレイ72に表示された操作ボタン71を用いて、装用者が眼鏡Fを装用した状態における眼鏡装用パラメータを入力する。例えば、眼鏡装用パラメータとは、瞳孔間距離PD、眼のPD高さh、角膜頂点距離VD、前傾角度θ、等である。なお、例えば、瞳孔間距離PDは、眼鏡FにおけるブリッジFBの中央から左眼の瞳孔位置までの距離LPDと、眼鏡FにおけるブリッジFBの中央から右眼の瞳孔位置までの距離RPDと、を入力するようにしてもよい。例えば、これらの眼鏡装用パラメータは、眼鏡装用画像解析装置(例えば、特開2015−179254号公報参照)等を用いて、予め取得しておくことができる。
例えば、眼鏡装用パラメータが入力されると、制御部60は、測定部2に対して眼鏡支持ユニット3を移動させる。例えば、制御部60は、瞳孔間距離PDに基づいて眼鏡支持ユニット3のモータ50を駆動し、眼鏡支持ユニット3を左右方向(X方向)に移動させる。例えば、本実施例では、制御部60が、眼鏡支持ユニット3を距離LPDだけ右方向に移動させる。これによって、装用者の左眼の視軸が左眼用のレンズLEを通過する点と、測定光学系10の光軸L1と、の左右方向における位置を一致させることができる。
また、例えば、制御部60は、眼のPD高さhに基づいて眼鏡支持ユニット3のモータ95を駆動し、眼鏡支持ユニット3を上下方向(Y方向)に移動させる。例えば、本実施例では、まず眼鏡支持ユニット3を下方向に移動させることで、受光素子14が眼鏡FのリムFRの下部を含む画像を撮影する。例えば、制御部60は、撮影された画像を画像処理(例えば、エッジ検出等)することによって、眼鏡FにおけるリムFRの下端の位置を検出する。この後、制御部60は、眼鏡支持ユニット3を、検出したリムFRの下部の位置から眼のPD高さhだけ上方向に移動させる。これによって、装用者の左眼の視軸が左眼用のレンズLEを通過する点と、測定光学系10の光軸L1と、の上下方向における位置を一致させることができる。
また、例えば、制御部60は、角膜頂点距離VDに基づいて眼鏡支持ユニット3のモータ28を駆動し、眼鏡支持ユニット3を前後方向(Z方向)に移動させる。例えば、眼鏡支持ユニット3の奥行方向は、日本において一般的に理想的な角膜頂点距離とされている12mm(すなわち、処方値を求めた際の角膜頂点距離)に相当する位置が初期位置として設定されている。例えば、ノーズピース6の移動量は、装用者の角膜頂点距離VDと、初期位置と、のずれ量に応じて設定される。例えば、装用者の角膜頂点距離VDが13mmであった場合、制御部60は、初期位置とのずれ量である1mmに相当する距離(移動量)だけノーズピース6を光学的に移動させる。なお、例えば、このような光学的な移動量は、予め実験やシミュレーション等により設定されていてもよい。例えば、これによって、装用者の左眼の視軸が左眼用のレンズLEを通過する点からノーズピース6までの距離を、装用者の角膜頂点距離VDに一致させることができる。
例えば、眼鏡装用パラメータが入力されると、制御部60は、測定部2に対して眼鏡支持ユニット3を傾斜させる。例えば、制御部60は、傾斜角度θに基づいて眼鏡支持ユニット3のモータ32を駆動し、眼鏡FのブリッジFBを回転中心として、眼鏡支持ユニット3を斜め方向(YZ方向)に傾斜させる。これによって、眼鏡支持ユニット4に載置された眼鏡Fの前傾角度と、装用者が眼鏡Fを装用した装用状態における眼鏡Fの前傾角度θと、を同一(または略同一)に調整することができる。
なお、例えば、操作者は、ディスプレイ72に表示された操作ボタン71を用いて、装用者の頭幅情報を入力してもよい。例えば、頭幅情報が入力されると、制御部60は後方支持部22間の幅Wを変更する。例えば、制御部60は、装用者の頭幅に基づいてテンプル調整ユニットの両軸モータ54を駆動し、後方支持部22間の幅Wを装用者の頭幅と一致させる。例えば、このとき、制御部60は、後方支持部22に取り付けられた検出センサを用いて、眼鏡Fが装用者の頭部を把持する把持力を取得するようにしてもよい。例えば、検出された把持力はディスプレイ72に表示される。
例えば、制御部60は、上記のように眼鏡Fの前傾角度θと、眼鏡Fが装用者の頭を把持することによる眼鏡Fの変形と、を調整することにより、眼鏡Fが装用者に装用された装用状態を再現する。なお、上記では眼鏡Fの前傾角度と変形の両方を調整する構成を例に挙げたが、これらのうちの少なくともいずれかを調整する構成であってもよい。
例えば、制御部60は、測定部2(測定光学系10)の移動と、前傾角度θ及び後方支持部22間の幅Wの変更と、を終えると、光源11を点灯させて、装用状態が再現された状態における眼鏡Fのレンズ特性(例えば、球面度数S、柱面度数C、乱視軸角度A、プリズム量Δ等)を測定する。例えば、上述のようにして測定されたレンズ特性は、眼鏡Fを装用した装用者が、レンズLEを介して前方をみた場合における装用状態の屈折力である。例えば、制御部60は、測定したレンズ特性をディスプレイ72に表示するとともに、メモリ75に記憶する。
例えば、制御部60は、装用者が眼鏡Fを装用した装用状態における左眼の屈折力を測定し終えると、右眼の屈折力についても測定を行う。この場合には、例えば、制御部60が、左眼の屈折力の測定後に、眼鏡支持ユニット3を瞳孔間距離PD(すなわち、距離LPDと距離RPDの和)だけ左方向に移動させる。また、制御部60は左眼の屈折力を測定した際と同様に、眼のPD高さh、角膜頂点距離VD、前傾角度θに基づいて測定光学系10を移動させ、装用者が眼鏡Fを装用した装用状態における右眼の屈折力を取得する。
以上説明したように、例えば、本実施例における眼鏡測定装置は、眼鏡の変形と、眼鏡の前傾角度と、の少なくともいずれかを調整する。これによって、操作者は、装用者が眼鏡を装用した装用状態を再現して、眼鏡のレンズ特性を測定することができる。従って、装用状態に近く、より精度の良い測定結果を得ることができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡の前方部位の位置、及び前記眼鏡の後方部位の位置の少なくともいずれかの位置を上下方向に移動させる。これによって、眼鏡の前傾角度を、装用者が眼鏡を装用した装用状態における前傾角度に変更することができる。例えば、前傾角度のずれはレンズ特性に大きく影響するが、装用状態を再現することにより、測定結果を精度良く得ることができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡を前傾させることによって、眼鏡の前傾角度を変更する。これによって、装用者が眼鏡を装用した際に、装用者の耳の位置や眼鏡の種類等で変化する眼鏡の前傾角度を再現することができる。従って、操作者は、装用者が眼鏡を装用した装用状態の前傾角度で、レンズ特性を測定することができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡のブリッジの位置及びテンプルの位置の少なくともいずれかの位置を上下方向に移動させる。これによって、眼鏡の前傾角度を容易な構成で変更することができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡のブリッジを回転中心として、眼鏡の前傾角度を変更することができる。例えば、眼鏡の装用状態では、装用者の鼻に当接したブリッジが回転中心となり、装用者の耳の高さ等によって、テンプルの位置が上下方向に変化する。このため、操作者は、容易に眼鏡の前傾角度を装用状態の前傾角度に合わせることができる。
また、例えば、本実施例における眼鏡測定装置は、眼鏡の前傾角情報に基づいて、自動的に眼鏡の前傾角度を変更する。これによって、操作者は、複雑な操作をすることなく、容易に眼鏡の前傾角度を装用状態の前傾角度に合わせることができる。
また、例えば、本実施例における眼鏡測定装置は、左右のテンプルの少なくとも一方のテンプルの位置を移動させることにより、左右のテンプルの間の幅を変更する。これによって、装用者が眼鏡を装用した際に、テンプルの間の幅が広がって変形した眼鏡の形状を再現することができる。従って、操作者は、装用者が眼鏡を装用した装用状態のテンプル間の幅で、レンズ特性を測定することができる。
また、例えば、本実施例における眼鏡測定装置は、装用者の頭幅情報に基づいて、自動的に左右のテンプルの少なくともいずれか一方のテンプルを左右方向に移動させる。これによって、操作者は、容易にテンプルの間の幅を装用者の頭幅に調整することができる。
<変容例>
なお、本実施例における前方支持部21は、眼鏡Fの前方部位の少なくとも1箇所を支持する構成であればよく、ブリッジFBのみの支持に限定されない。例えば、前方支持部21は、リムFR(左リムFRL及び右リムFRR)を支持してもよい。この場合には、左リムFRLを支持する前方支持部と、右リムFRRを支持する前方支持部と、の2つの前方支持部を設ける構成としてもよい。もちろん、前方支持部21は、ブリッジFBとリムFR等、複数の箇所を支持するようにしてもよい。この場合には、ブリッジFBと、左リムFRLと、右リムFRRと、をそれぞれ支持する3つの前方支持部を設ける構成でもよいし、ブリッジFBと、左リムFRLと、右リムFRRと、を1つの前方支持部で支持する構成でもよい。
なお、本実施例における後方支持部22は、眼鏡Fの後方部位の少なくとも2箇所を支持する構成であればよく、モダンFM(左モダンFML及び右モダンFMR)のみの支持に限定されない。例えば、後方支持部22は、テンプルFT(左テンプルFTL及び右テンプルFTR)を支持してもよい。もちろん、後方支持部22は、眼鏡Fの後方部位として、モダンFMとテンプルFT等、複数の箇所を支持するようにしてもよい。
なお、本実施例においては、眼鏡Fの左モダンFMLと右モダンFMRとのそれぞれにおいて重量を測定する構成を例に挙げたがこれに限定されない。例えば、眼鏡Fは概ね左右対称であるため、左右モダンのどちらか一方における重量を測定する構成としてもよい。例えば、左モダンFMLのみ重量を測定した場合には、右モダンFMRの重量を左モダンFMLの重量と略同一とみなしてもよい。同様に、右モダンFMRのみ重量を測定した場合には、左モダンFMLの重量を右モダンFMRの重量と略同一とみなしてもよい。
また、本実施例においては、眼鏡FにおけるブリッジFBと、左モダンFMLと、右モダンFMRと、の3箇所に測定センサ(すなわち、測定センサ4a、測定センサ4b、及び測定センサ4c)を設ける構成を例に挙げたがこれに限定されない。このような測定センサは、眼鏡Fの前方部位と後方部位の位置において重量を測定することが可能であればよく、いくつ設置してもよい。
なお、例えば、本実施例においては、前方支持部21と測定センサ4aとが一体的に形成され、これらを兼用する構成を例に挙げて説明したがこれに限定されない。例えば、前方支持部21と測定センサ4aはそれぞれが別に設けられていてもよい。この場合、測定センサ4aを前方支持部21の近傍に配置してもよい。もちろん、測定センサ4aを前方支持部21とは異なる位置に配置してもよい。
また、例えば、本実施例においては、後方支持部22と測定センサ4b、あるいは後方支持部22と測定センサ4cが一体的に形成され、これらを兼用する構成を例に挙げて説明したがこれに限定されない。例えば、測定センサ4bは後方支持部22の近傍に配置してもよいし、後方支持部22とは異なる位置に配置してもよい。同様に、例えば、測定センサ4cは後方支持部22の近傍に配置してもよいし、後方支持部22とは異なる位置に配置してもよい。
なお、本実施例におけるテンプル調整ユニット100は、後方支持部22がテンプルの内側と外側のどちらにも当接することによって、眼鏡FにおけるテンプルFT間の幅を変更する構成を例に挙げて説明したがこれに限定されない。例えば、テンプル調整ユニット100は、左右テンプルの内側にのみ当接してもよいし、左右テンプルの外側にのみ当接してもよい。また、例えば、テンプル調整ユニット100は、左右テンプルのうちの一方が内側に当接し、他方が外側に当接する構成であってもよい。
また、例えば、本実施例におけるテンプル調整ユニット100は、左右のテンプルの双方の位置を移動させることによって、眼鏡FにおけるテンプルFT間の幅を変更する構成を例に挙げて説明したがこれに限定されない。例えば、テンプル調整ユニット100は、左右テンプルの少なくとも一方を内側に移動する構成(例えば、テンプルが内側に押し込まれる構成等)でもよいし、左右テンプルの少なくとも一方を外側に移動する構成(例えば、テンプルが外側に引っ張られる構成等)でもよい。
なお、本実施例においては、バランス情報をディスプレイ72に表示することで出力する構成を例に挙げて説明したがこれに限定されない。例えば、バランス情報は、プリンタ等を用いて印刷することにより出力してもよいし、データとして外部メモリに出力してもよい。
なお、本実施例においては、測定部2に対して眼鏡支持ユニット3を移動させることによって、測定光学系10の光軸L1と、装用者の視軸が眼鏡FのレンズLEを通過する点と、を一致させる構成を例に挙げて説明したがこれに限定されない。例えば、眼鏡支持ユニット3を移動させるのではなく、測定部2を移動させることによって、測定光学系10の光軸L1と、装用者の視軸が眼鏡FのレンズLEを通過する点と、を一致させる構成としてもよい。
なお、本実施例においては、装用者の視軸が眼鏡FのレンズLEを通過する点において、レンズLEのレンズ特性を取得する構成を例に挙げて説明したがこれに限定されない。例えば、ノーズピース6に対してレンズLEを走査し、レンズLEの全体におけるレンズ特性を取得するようにしてもよい。例えば、この場合、制御部60は、このようなレンズ特性に基づいて、レンズ特性を示すマッピング画像を取得するようにしてもよい。
なお、本実施例においては、装用者が眼鏡Fを装用した状態における眼鏡装用パラメータに基づいて、眼鏡支持ユニット3を上下方向、左右方向、及び前後方向に移動させる構成を例に挙げて説明したがこれに限定されない。例えば、眼鏡支持ユニット3は、上下方向と左右方向にのみ移動させ、前後方向には移動させない構成であってもよい。この場合には、装用者の角膜頂点距離VDを用いて、装用者が眼鏡Fに枠入れされたレンズLEを介して前方をみた場合の屈折力を計算で求めるようにしてもよい。