ウェーブディスクの1つの実施形態の軸方向図である。
図1のウェーブディスクのスポーク間の径方向スロットの詳細図である。
図1のウェーブディスクを含むデバイスの斜視断面図である。
図1のウェーブディスクの拡大図である。
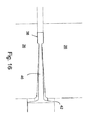
ウェーブ形状を示す図1のウェーブディスクの側面図である。
ウェーブ形状を示す図1のウェーブディスクの45度の図である。
ウェーブ形状を示す図1のウェーブディスクの頂面図である。
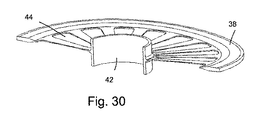
ローブ付き出力リングを有するウェーブディスクの1つの実施態様の軸方向図である。
ローブ付き出力リングを有するウェーブディスクの1つの実施形態の斜視図である。
ローブ付き出力リングを有するウェーブディスクの1つの実施形態の拡大図である。
永久磁石を有するウェーブディスクの1つの実施形態の切欠き斜視図である。
永久磁石を動かすよう配置された電磁石も示す図7の1つの実施形態の切欠き斜視図である。
電磁石を有するウェーブディスクの切欠き斜視図である。
ウェーブディスクの接触面及び出力部材の接触面にある隆起及び整合溝を備えるウェーブディスクデバイスの切欠き斜視図である。
ウェーブ形状を得るために未だ予荷重されていないウェーブディスクの1つの実施態様の軸方向図を示す概略的な例示である。
図11の実施態様の径方向図を示す概略的な例示である。
図11の実施態様の斜視図を示す概略的な例示である。
ウェーブ形状を得るために予荷重された図11の実施態様の斜視図を示す概略的な例示である。
外側リングが2つのマンドレルの間で圧縮されて円周方向に延伸させられるよう位置付けられたディスクの斜視断面図である。
2つのマンドレルの間の圧縮を受ける図15のディスクの外側リングの拡大断面図である。
3個のウェーブの形状を得るよう軸方向予荷重に晒された、圧縮後の、図16のディスクの切欠図である。
4個のウェーブを備える図17のディスクを示している。
5個のウェーブを備える図17のディスクを示している。
6個のウェーブを備える図17のディスクを示している。
7個のウェーブを備える図17のディスクを示している。
8個のウェーブを備える図17のディスクを示している。
9個のウェーブを備える図17のディスクを示している。
10個のウェーブを備える図17のディスクを示している。
11個のウェーブを備える、軸方向荷重部材の間に位置付けられた、図17のディスクを示している。
図25のディスク及び荷重部材の断面図である。
切欠きを有するディスクの実施形態の軸方向図である。
図27の実施形態の径方向図である。
静止する2個のウェーブ形状を示す予荷重のないディスクより明確に示す角度での、図27の実施形態の他の径方向図である。
図27の実施態様の断面斜視図である。
ウェーブを伝搬させるよう追加されたピエゾストリップを備える、図27の実施形態の断面斜視図である。
スポークの最大の弾性曲げ偏向を示す図31の実施形態の切欠き斜視図である。
整流中の図31のデバイスの異なる極での時間に亘る電圧の変化を示すグラフである。
図33中の破線によって示す時の極の位置を示す図31のデバイスの径方向図である。
ウェーブディスク上でウェーブを伝搬させる制御システムの実施形態を示す簡略化された概略図である。
ディスクが型からの除去前に冷えるときにウェーブ形状を達成するより低いCTEインサートを備える射出成形を用いるウェーブディスクの実施形態の軸方向図である。
より低いCTEインサートを示すよう隠された線が見える状態の図36の実施形態の外径リングの拡大斜視図である。
射出成形リングよりも低いCTEを備える連続的なリングインサートを含む他の射出成形実施形態の軸方向図である。
インサートを示す図38の実施形態の拡大斜視断面図である。
ハウジングの異なる側の間のトルク伝達を可能にする非対称的な外径リングを備えるウェーブディスクの実施形態の斜視断面図である。
図40の実施形態の拡大断面図である。
ウェーブ伝搬中に円周方向の膨張及び収縮を可能にするスロットを有する非対称的な外径リングの実施形態の斜視断面図である。
図40の分割ハウジング内の配置された図42の実施形態の斜視断面図である。
ウェーブディスク及び出力リングのローブ付き構成の軸方向図である。
ウェーブディスク及び出力リングのローブ付き構成の拡大軸方向図である。
ウェーブディスク及び出力リングのローブ付き構成の斜視図である。
ウェーブディスクの一方又は両方の側にある永久磁石とハウジングディスクに取り付けられた電磁石コイルのアレイとを備える実施形態の斜視断面図である。
ハウジング内の3個のウェーブの円周方向に座屈させられた内径リングディスクの簡略化された部分的なアセンブリの例の斜視断面図である。
ハウジングを備えないが、恰もハウジングによって軸方向に予荷重されたかのような3つのウェーブ形状に座屈させられた、図48のディスクの斜視断面図である。
本開示の原理を用いた線形アクチュエータの概略的な斜視断面図である。
ウェーブプレートのみを示す図50の線形アクチュエータの概略的な斜視断面図である。
ウェーブディスクに対して軸方向の力を適用する整流のために用いられる径方向に曲がる圧電アクチュエータのスタックを有するウェーブプレートの部分的に組み立てられた部分的な斜視図である。
図52のウェーブプレート及びピエゾスタックの断面図である。
径方向に膨張又は収縮するアクチュエータがどのように膨張又は収縮して軸方向のウェーブ伝搬効果をもたらすかを示す断面図の例である。
ウェーブフォイルの表面に接着された電気活性ウェーブ伝搬要素を備える線形ウェーブプレート(又はフォイル)の概略の斜視切欠図である。
図55の概略の端面図である。
外側部材に固定されたウェーブフォイルを備える線形アクチュエータの端面図である。
図57の線形アクチュエータの斜視切欠図である。
図58の線形アクチュエータの断面図である。
ウェーブフォイルの概略の部分図である。
ウェーブフォイルのウェーブを示す図60のウェーブフォイルの概略の部分図である。
90度の円弧フォイルの頂面図である。
静止した円弧フォイルの上に重ねられた座屈させられた90度円弧フォイルの頂面図である。
ウェーブ形状を示す図63の重ねられたフォイルの斜視図である。
2つの出力面の間の円弧フォイルの斜視図である。
右側で静止し且つ左側で曲げられた円弧フォイルを示す斜視図である。
ウェーブディスク実施形態の軸方向図である。
図67のウェーブディスクの対向するアクチュエータのセットの中心線に沿った切欠きの詳細図である。
回転する非接触の永久磁石ウェーブ伝搬構成の簡略化された部分的なアセンブリの斜視図である。
非接触永久磁石と接触する転がりウェーブ伝搬部材とを備える回転する入力部材の斜視図である。
軸方向に細長いディスクローブを例示するローブ付きウェーブディスク及びローブ付き出力リングの部分的なアセンブリの径方向図であり、ウェーブディスクの一方の軸方向側にあるローブは、平面的な接触部材の差動回転をもたらすよう、対向する側にあるローブよりも長い。
図71の部分的なアセンブリの詳細図である。
ウェーブアクチュエータの製造方法におけるステップを示している。
ウェーブアクチュエータの製造方法におけるステップを示している。
ウェーブアクチュエータの製造方法におけるステップを示している。
ロール成形製造方法の概略を示している。
請求項によって保護されるものから逸脱することなく、本明細書に記載する実施形態に重要でない変更を行ってよい。
ウェーブアクチュエータ(波アクチュエータ)(wave actuator)は、二次元構造の第1の方向に沿ったウェーブ(波)を有するウェーブ形状(波形状)を形成するよう、二次元構造の第1の方向における圧縮時にプレストレスが与えられる部分を少なくとも有する二次元構造と、ウェーブ形状のウェーブと接触して配置される出力部(output)と、第1の方向に沿ってウェーブを伝搬させて出力部を二次元構造に対して移動させるように配置されるウェーブ伝搬体(波伝搬体)(wave propagator)とを含み、出力部及び二次元構造は、互いに可動に配置される。二次元構造は、例えば、ディスク又はベルトであってよい。二次元構造はシート状であり得るが、切欠きを有してよく、スポーク又は他の線形部材を含んでもよい。二次元構造は、概ね二次元構造に対して垂直な延長部を含む複雑な構造を有することがある。
ディスクについて、円周方向の圧縮荷重は、均一に分散された径方向に応力が与えられたディスク又はスポーク又は撓み部(flexure)アレイ等の結果である。即ち、ディスクは、リングから径方向に内向きにディスク区画(disk section)の回転対称径方向荷重を有さなければならない。
二次元構造は、平坦又は平面的である必要はない。曲がった二次元構造は、依然として二次元である。出力部は、典型的に、全体として理解されるとき、二次元構造と概ね平行な二次元表面を有するが、ウェーブ形状の故に、二次元構造に対して局所的に平行でない場合がある。表面に対するウェーブ形状の圧縮は、次に、ウェーブ形状を押し付けて、ウェーブ形状が表面と接触する表面と局所的に適合させる。二次元構造がディスクである場合、典型的には、圧縮時のプレストレスは、圧縮時の円周方向のプレストレスであり、円周方向のウェーブをディスクの周りに押し付け、ウェーブの伝搬及び出力部の結果としての移動も円周方向である。二次元構造がベルトである場合、典型的には、圧縮は、ベルトの縁に沿い、ベルトの縁に沿ってウェーブ形状を形成し、ウェーブの伝播及び結果としての出力の移動も縁に沿い、よって、典型的には、ベルトの長さと平行な縁を備える一貫した幅について、ベルトの長さに沿う。円弧形状の二次元構造は、湾曲したベルトと考えられ得る。例えば、円周部分の径方向の幅を制限するよう作用する張力部材によって、ディスクの円周部分の圧縮時のプレストレスを達成し得る。径方向の幅は、これは余り典型的でない実施形態であるが、外側からの径方向の圧縮によっても制限され得る。例えば、張力部材を用いてベルトの長さを制限することによって、ベルトのための圧縮時のプレストレスを達成し得る。例えば、ベルトの縁で形成されるウェーブとの干渉を避けるために、張力部材をベルトの縁からオフセットさせ得る。典型的には、より良好な牽引のために、ウェーブ形状は2つの出力面の間に拘束される。
出力面を互いに剛的に接続し得る。出力部は固定されてよく、或いは二次元構造は固定されてよく、或いは何れも固定されなくてよい。出力面は互いに対して移動可能であってよく、二次元構造は出力面を差動的に移動させるよう構成されてよい。一方の出力面が他方の出力面に対して移動可能である場合、一方は他方の出力の基準として作用してよく、所望の動きは基準に対する出力部の動きである。出力面を差動的に移動させる二次元構造の構成は、例えば、二次元構造に対して垂直な方向において出力面と接触する部分で二次元構造の一方の側をオフセットすることによって達成されてよい。ディスクの場合、この垂直オフセットは、軸方向オフセットである。
ウェーブアクチュエータの1つの実施形態において、ウェーブアクチュエータは、圧縮時に円周方向にプレストレスが加えられ、ディスク外径(OD)の外向きの変位を防止するよう径方向に拘束され、ODの周りに軸方向のウェーブ形状を生成するような(複数の)フレキシブル部材を備える、円形のウェーブディスク(波ディスク)を含む。このウェーブは、1つの例において、双曲放物面と類似の形状であるが、より一般的な双曲放物面とは異なり、それは剛性形状(rigid shape)でない。むしろ、この開示の原理に従って構成されるとき、ウェーブの頂点は、円周の周りに付勢された角位置を有さず、最小限の力及び最小限の機械的損失で円周方向に伝播させられ得る。出力ディスクに対して軸方向に荷重されないとき、ディスクは、常に2つのウェーブ(2の山頂及び2つの谷)の形状に戻る。軸方向の予荷重が2つのウェーブの形状に適用されるときにだけ、それは2つよりも多くのウェーブを備える形状に移行する。2つよりも多くの全てのウェーブ部材について、軸方向に荷重を加えられたディスク又はリング又は他の出力部材が必要であり、それらは必ずしも各図面に示されていない。
デバイスの例示的な実施形態は、以下の構成を有する1以上(1つ又はそれよりも多く)のウェーブディスクを含む:ディスクのODにある又はその付近にある必ずしも必要でないが好ましくは軸方向に厚いリング部分;貫通孔を備える又は備えない中心軸(この開示では、明瞭性の目的のために、中心軸領域は大部分の実施形態について貫通孔を用い、内径(ID)と呼ぶ);ウェーブが伝搬させられるときに、一方又は両方の軸方向に曲がり得るが、実質的に円周方向に曲がり得ない、必ずしも必要でないが好ましくはODリング断面よりも薄い、ディスク領域;ディスクは、好ましくは、例えば、限定するものではないが、ディスクと出力部材との間の(複数の)ブッシング又は(複数の)軸受、又はディスクが全ての径方向における動きから拘束されるようディスク上の又は出力部材上の歯又はローブ又は噛合する円周溝と噛合するディスク上の歯又はローブで、デバイスの回転軸上でディスクを中心化(芯出し)する手段を有し、例示的なウェーブディスクは、ディスクから出力部材上の噛合面に回転及びトルクを伝達するディスクの1以上の軸方向に面する表面に1以上に接触面を有する。この表面インターフェースは、牽引インターフェース、ギア付き又はローブ付きインターフェース、接触位置にあるディスク上の概ね平面的な表面、接触位置にあるディスク上の概ね円錐形の表面、接触表面積を増大させ且つディスクとハウジング部材隆起26及び/又は溝28との間の楔効果の結果として表面接触圧を増大させる1以上の円周方向に整列させられた隆起26及び/又は溝28を備える図10に示すような接触位置にある隆起付き表面を含むが、これらに限定されない。この例示的な実施形態は、ディスクとハウジング部材との間の接触の角位置を変化させるために任意の円周方向に1以上のウェーブの頂点を伝播させる手段を有し、伝搬させる手段は、ディスクに取り付けられた柔らかい金属材料を直接的に引っ張る電磁石(又は非限定的に4343鋼のような軟磁性材料で作られたディスク自体)、ウェーブが伝搬させられるときにある方向に動くディスクの任意の部分に取り付けられる永久磁石を引っ張る電磁石、ウェーブが伝搬させられるときにある方向に動くディスクの任意の部分を押す且つ/或いは引っ張る且つ/或いはそのような部分の弾性変形を引き起こすピエゾセラミック材料、ウェーブが伝播させられるときにある方向に動くディスクの任意の部分の熱膨張及び/又は収縮、ウェーブが伝播させられるときにある方向に動くディスクの任意の部分に作用する液圧、ウェーブが伝搬させられるときにある方向に動くディスクのいずれかの部分に作用する気体の空気力学的な力及び/又は圧力、ウェーブが伝搬させられるときにある方向に動くディスクの任意の部分に作用する電気反応性材料、及び/又はディスク上の満仁を伝搬させるためにも用い得る広範なアクチュエータ又は作動材料又はデバイスを含むが、それらに限定されない。一般的に言えば、ウェーブが伝搬させられるときに動くディスク上の任意の地点を、作動手段を用いてその地点に対して力を加えることによって作動地点として用い得る。アクチュエータ又はアクチュエータ手段のための他の取付地点は、ディスク自体の上に又はハウジング部材の上に又は出力部材の上にあってよい。この例示的な実施形態は、ディスクからのトルクを出力部材にトルクを伝達するよう、ディスクに向かって面し且つディスクと噛み合うディスク接触区画の類似の径方向寸法に好ましくは円形の接触区画を有する、1以上の出力部材も有する。出力部材上の2つの表面は、ディスクの軸方向端のいずれかに設けられてよく、ディスクの軸方向両側でディスクと接触するよう軸方向に離間させられてよい。出力部材の軸方向の離間は、接触面が常に予荷重されるように、ディスクの頂点に軸方向に予荷重を加えるように配置されてよい。その上、上記ディスクのうちの1よりも多くは、トルク容量を増大させるために、1つよりも多くのセットの出力部材の間に挟装されてよい。
幾つかの潜在的な変形は、ディスクを基準部材として用い得ることを含み、ディスクの両方の軸方向端は、互いに固定される出力部材上の軸方向に内向きに面する表面にトルクを伝達する。この構成では、ディスクが回転軸に対して垂直な平面を横断して対称的であることが好ましい。一方の軸方向端の一方の接触面が、対向するディスクと出力部材との間の接触パッチ速度比と異なるディスクと出力部材との間の接触パッチ速度比を有するよう、ディスクは、(例えば以下に限定されないがリングの接触面がODリングから内向きにディスク材料から軸方向に遠い状態で)、回転軸に対して垂直な平面のいずれかの側で非対称的であり得る。この場合、2つの出力部材の各々はディスクのウェーブが伝搬するときにディスクに対して異なる速度比を有してよいのに対し、ディスクは自由に浮動することができ、或いは異なる入力又は出力に取り付けられてよい。この構成は、好ましくは、対向する出力部材の間に軸受を用いて、表面の軸方向荷重をもたらす。より簡単に記載する変形は、直列又は並列に用いられる多数のステージ、モータ又は発電機の使用、速度増大機(speed increaser)又は速度減少機(speed decreaser)としての使用、上述のようなアクチュエータを用いたウェーブディスクの直接的な駆動、電気又は他のモードの電力を発生させるような回転式入力を用いたウェーブディスクの駆動であり、可変比出力は、一方又は両方の出力部材又は出力部材の軸方向間隔に対するディスクの軸方向変位を変更することによって達成可能な場合がある。
本デバイスを構成する多くの方法のうちの1つの非限定的な例
ウェーブディスク1(wave disk)の例示的な実施形態は、図1に示すような径方向ブレード/スポーク3のアレイ(array)を有する。ディスク1は、多数の異なる材料又は異なる大きさであり得るが、この非限定的な例において、ウェーブディスクは、直径8インチであり、チタン製である。内径(ID)ハブ20は、スポーク間の干渉を伴わずにスポークの内向きの径方向変位を可能にするよう、径方向にスロットが設けられている。図2に示すように、スポークが引込位置(drawn-in position)にあるとき、スポーク間の概ね径方向のスロット4は、互いに干渉せずに、スポークが径方向に内向きに所望の距離だけ引かれるのを可能にする。
図3に示すように、好ましくは、出力部材9の湾曲した又は円錐形の表面8が、例えば、ボルト(図示せず)で軸方向に内向きに引かれて、2つの出力部材を堅固に接続する。円錐面8は、ウェーブディスクODリング2を軸方向に圧縮して、ウェーブディスクODリング2と出力接触面8との間に好ましくは軸方向に予荷重された(preloaded)接触を生成する。多数の方法で径方向変位を達成し得る。この例示的な実施形態では、図4に示すように、2つの好ましくは円錐形のスリーブ5が、IDハブ20上の円錐形のスリーブ7の周りで(図示しないボルト又はネジ山又は他の手段を用いて)径方向内向きに軸方向に引かれ、結果として得られる0.002インチ〜0.20インチの間の変位と径方向内向きの力を生成する(しかしながら、幾つかの幾何学的形状及び用途については、より高い又はより低い変位が機能することがある)。これはスポークのIDを内側に引き、スポーク上で内向きの径方向張力を生む。この概略図において、ディスクのテーパ面7は干渉して示されている。外径(OD)リング区画2は、スポークのように円周方向に隔てられておらず、従って、周方向の圧縮に抗する。また、ODリング区画2は、スポーク3よりも厚いことが好ましい。スポーク上での内向きの張力は、ODリングの円周方向の圧縮荷重をもたらし、ODリングを0.002インチ〜0.2インチの軸方向の大きさで円周ウェーブ内に座屈させる(しかしながら、より大きな又はより小さなウェーブの大きさが可能であり、幾つかの用途のために有用な場合がある)。結果として得られるウェーブ形状は、出力部材に対して軸方向に予荷重されていないとき、図5A乃至図5Cに示すように、2つのウェーブの山及び2つのウェーブの谷を備える双曲放物面に類似する。
図3に示すように、一対の好ましくは対称的な出力面8が、出力ハウジング部材9に固定されるので、それらはアクチュエータの中心軸の周りで一体成形品として一緒に回転する。これらの2つの表面は、ウェーブディスクがそれらの間に挟装された状態で、(図示しない)ボルト又は他の手段によって軸方向に一緒に引かれる。ウェーブディスクが(図6A乃至図6Cに示すような)軸方向ローブ又は歯22を有するならば、必要な予荷重は、最大トルクの下でローブを係合させられたままに維持するのに十分なだけ高ければよい。図6A乃至図6Cは、ローブ付き出力リングと係合する細長いローブを備えるローブ付き表面の例を示している。ディスクの一方の側の歯は、他方の側の歯と異なる径方向位置にあってよい。接触面が牽引トルク伝達のために設計されるならば、予荷重力はギア又はローブで必要とされるよりも高いことが好ましい。この例示的な実施形態では、2つのウェーブが円周方向の座屈をもたらす。臨界的な軸方向予荷重まで、ウェーブディスクは2つのウェーブの山と2つのウェーブの谷を維持する。追加的な軸方向の予荷重があるならば、ウェーブディスクは3つのウェーブを備えるより低いエネルギ形状を得る。更に高い軸方向の予荷重があるならば、ウェーブディスクは4つのローブを備えるより低いエネルギ形状を得る。
追加的なウェーブが、出力部材の追加的な予荷重及び/又は軸方向の変位を伴って形成し続ける。追加的なウェーブの利点は、電磁的に駆動される場合のウェーブディスクと電磁石との間のより小さな空気間隙と、軸方向予荷重の増加に応じた全接触表面積の増加とを含む。
ウェーブディスクは、低摩擦軸受によって出力部材に同軸に保持されるのが好ましい。(1つの非限定的な例としてロボットベースのような、しなしながら、ロボットベースに限定されない)作動アセンブリの固定部材への取付けのためのフランジは、ウェーブディスクIDアセンブリ構造に含められる。(ロボットアームのような、しかしながら、ロボットアームに限定されない)出力部材の取付けのためのフランジは、出力部材の幾何形状に含められる。
図8及び図9に示すように、電磁石12のアレイは、ウェーブディスクのIDハブに固定されたディスク24に取り付けられるのが好ましい。電磁石を出力部材にも取り付け得る。電磁石をディスクの片面又は両面で使用し得るが、ここでは片面のみを示している。これらの電磁石は、ディスクに埋め込まれた、ディスクに取り付けられた、或いは図7に示すように(チタン製であるのが好ましいが、チタン製である必要がない)フレキシブルリング11を用いてディスクに保持された永久磁石10に又は(実施形態を示していない)ウェーブディスクに、直接的に磁気力を加える。電磁石のEMコイル13を整流することは、永久磁石を軸方向においてコイルに向かって又はコイルから離れる方向に引き且つ/或いは反発させ、そうするときに、ウェーブを伝搬させる。ウェーブが伝搬すると、ディスクODリング接触面の円周長と出力接触円との間の差は、ウェーブの軌道と出力回転との間の減速比を定める。100:1〜最大1000:1の間の比が可能であり、特定の材料及び幾何学的形状を備える特定の条件下では、より大きい比及びより小さい比が可能であると考えられる。永久磁石は、ネオジム又は他の種類の磁石であり得る。この構成ではチタンディスクが有益である。何故ならば、チタンディスクは極めてフレキシブル(可撓)であり、渦電流の発達に抗するからである。フレキシブルな連結リング11を多くの異なる材料で作り得る。チタンが好ましい材料であると考えられる。リング継手(ring coupling)は、例えば、スポークに接続される(ここでは図示しない)ボルトのような締結具を用いてディスクに取り付けられてよい。
デバイスは、多数のウェーブディスクを有してよく、通孔を有さなくてよい。
鍛造プラスチックディスク(非限定的な例)
他の例示的な実施形態は、高強度、低クリープ弾性率、及び塑性変形後の強度の高い割合を維持する能力を備える、ポリカーボネート又は他のポリマで作られたディスクを用いる。ディスクは、回転的に途切れていない(uninterrupted)ハブと、円周方向に途切れている(interrupted)スポークアレイと、円周方向に途切れていない好ましくは軸方向により厚いODリング区画とを備える、回転対称のディスク形状として、初期的に製造される。次に、ODリングは、その圧縮強度限界を超えて、2つのダイの間で軸方向に圧縮される。ODリングの塑性変形は、(スポークが今やより大きいODリングの径方向外向きの動きに抗する結果として)円周方向の圧縮を生成し、次に、それは、ダイの力が円周方向の座屈の故に除去されるときに、(ディスクの弾性限界内で)円周方向のウェーブ変形をもたらす。
本開示における他の実施形態と同様に、次に、任意の数の作動手段によって、例えば、電磁石又はピエゾアクチュエータ(piezo actuators)又は本開示に記載するアクチュエータの種類のうちのいずれかを用いて、このウェーブを整流し得る。ピエゾアクチュエータは、例えば、スポーク又はディスクの軸方向表面に沿って、及び/又は円周方向に、及び/又はこれらの2つの極値の間の角度で、ディスク内で半径方向に配置されてよい。径方向圧電変換器(radial piezoelectric transducers)は、円周ウェーブを伝搬する。ID付近の径方向の偏向(deflection)がゼロに近いという点において、径方向ピエゾ(radial piezos)には明確な利点がある。これは(最も強いピエゾ材料の特性である)極めて小さな偏向を伴うピエゾを用いる機会を提供する。径方向スポークの曲げ偏向は、径方向に外向きに増大する。これは、より厚い材料がそれほど曲がる必要のないより低い偏向の領域におけるより大きな力のために、IDに向かってより厚いピエゾ(又は他の電気反応又は磁歪)材料を用いる機会を提供する。
この設計はプラスチックに限定されず、例えば、金属と共に用いられ得る。図15乃至26及び対応する記述を参照のこと。
磁性ODリングと共に射出成形される(非限定的な例)
他の例示的な実施形態は、(ウェーブ形状のない)回転対称のディスク形状で(例えば)射出成形される熱可塑性ディスクを用いる(しかしながら、冷却されると収縮する多くの他の材料が用いられてよい)。それは回転的に途切れていないハブを有し、円周方向に途切れているスポークアレイを有していてよく、或いは、それは回転的に途切れていないディスク形状、好ましくは円周方向に途切れていない軸方向により厚いODリングを有してよい。より高い圧縮強度及びより低い熱膨張係数を有する鋼リングのような固体金属リング(鋼リングに限定されない)が、プラスチックが射出される前に型内に配置され、スペーサで保持されるので、固体金属リングは、型が充填されるときに完全にプラスチックに包まれる。プラスチックは、好ましくは、型が閉じられる間に室温まで冷却される。型が開けられると、プラスチックの収縮は、ODリングで径方向に内向きの力を生成する。結果的に、圧縮性のより少ないODリングインサートは、円周方向の圧縮において荷重され、ディスクの適切な収縮で、円周方向に座屈させられる。(プラスチックディスク及び鋼又は他のODリング材料インサートの弾性限界内の)結果として得られる円周ウェーブの創成は、2つの出力部材の接触面の間で軸方向に圧縮され得る。伝搬するウェーブは、ウェーブディスクから出力部材/複数の出力部材にトルクを伝達する。更なる記述は図36乃至39に関して見出され得る。
次に、この開示における他の実施形態と同様に、任意の数の作動手段によって、例えば、電磁石又はピエゾアクチュエータ又はこの開示において記載するアクチュエータの種類のうちのいずれかを用いて、このウェーブを整流し得る。
上記の非限定的な例のために及びこの開示の基本原理に従ってこのデバイスを構成し得る他の多くの方法のために、ディスクの、必ずしも軸方向により厚くなくてよいが、好ましくは軸方向により厚い、ODリングの円周方向の圧縮は、以下を含む数多くの方法で達成され得るが、それらに限定されない。第1に、ODリングから内向きのディスクの領域に張力をかけること。これは、以下のことに限定されないが、径方向に張力をかけられた径方向スポーク又はブレード、概ね径方向のフィラメント整列においてODリング及びIDリングを接続する非限定的なケーブル又はワイヤ又はベルト又はチェーンのような径方向に張力をかけられたフィラメント、ディスクのIDを熱的に収縮させること、例えばディスクIDを弾性的に及び/又は塑性変形的に径方向に内向きに変形させるテーパ状のリングを非限定的に用いてディスクのIDを機械的に収縮させることを含む、数多くの方法で行われ得る。第2に、以下のことに限定されないが、ODリングを軸方向に落とし鍛造してODリングの塑性変形を引き起こすこと、ODリングを軸方向に鍛造してODリングの塑性変形を引き起こすこと、ODリングを円周方向にロール成形してODリングの塑性変形を引き起こすこと、又は好ましくはIDにより近い内向きの領域の漸進的により少ない軸方向の塑性変形を伴ってODリング及びODリングから径方向に内向きの領域を鍛造し或いは落とし鍛造し或いはロール成形してODに向かうディスクの漸進的により円周的な圧縮を生じさせることによって、ODリング区画を軸方向に圧縮することを含む。第3に、円周方向におけるディスクの圧縮に抗するディスクのOD付近により高い圧縮剛性材料のリングを埋め込み、例えば、以下のことに限定されないが、冷却されるときに収縮する熱可塑性物質(又は他の適切な材料)がディスクのODを内向きに引く十分に高い成形温度及び十分に高い熱膨張係数を備える熱可塑性ディスクのOD領域内に材料のリングを射出成形することによって、より低い剛性材料で径方向張力を生じさせること。円周方向により剛的なリング材料は円周方向の圧縮に抗し、ディスクのODは双曲放物面に類似するより低いエネルギ形状を得る。或いは、熱可塑性材料又は冷却されるときに若しくは(熱硬化性材料が高い収縮率を備える場合には)硬化するときに収縮する他の材料を用いることによって、ディスクが特定のウェーブの場所に偏らないよう、離型前にディスクを完全に冷ますのが好ましい。円周方向に圧縮がより少ないリングは、以下に限定されないが、作動のためにも用い得る永久磁石のアレイのような、材料のセグメント化されたアレイであり得る。
追加的な変形
変形は、例えば、最小のエネルギ形状がディスクに2つのウェーブ形状を維持させる距離を超えてディスクが軸方向に圧縮されるならば、ディスク毎に2つよりも多くの正及び負のウェーブを含む。この場合、ディスクはその周囲の周りにより多くのウェーブの数を有するより低いエネルギ形状を得る。具体的には、出力接触面の間の軸方向距離が減少させられると、ウェーブディスクは2つのウェーブ(2つの軸方向における2つの頂点(apexes)及び反対の軸方向の2つのウェーブの頂点)から3つのウェーブに移行し、次に、より大きな変位で、4つのウェーブに移行し、そして、5つのウェーブに移行する等である。これは(2つのウェーブと比較した3つのウェーブの例において本明細書で説明する)軸方向の圧縮が次の相補的な効果をもたらすという点において有益な効果であると考えられる。
3つのウェーブでは、ロータの軸方向変位は減少させられ、それはディスクと電磁石アクチュエータアレイとの間の最大空気間隙を減少させる。これは、ウェーブを伝播させるために利用可能な磁力を増大させる。2つのウェーブと比較して3つのウェーブを用いるならば、電磁石アレイ又は他の作動方法が、2つの領域ではなく3つの領域に作用し得る。2つのウェーブではなく3つのウェーブを用いるならば、ディスクの弾性的な偏向は減少させられ、ピエゾセラミックスのような高力ではあるが低変位の作動材料を用いる作動により良好に適する。2つのウェーブではなく3つのウェーブを用いるならば、所与の全軸方向荷重についての接触圧力を減少させることが可能であると考えられ、それはウェーブディスクと出力部材との間の牽引インターフェースのためのより低い硬度の材料の使用を可能にすることがある。これは、高摩擦係数ゴム又はポリウレタン又は他のポリマのような弾性材料の使用を可能にすることがあるが、これらに限定されない。所与の全予荷重力についてのウェーブの数が増加すればするほど、ウェーブディスクの接触力を出力部材により均一に分散させる。これはこれらの部品の所要の剛性を減少させ、より低い質量を可能にする。
また、図71及び図72に示されているのは、摺動接触が減少させられたローブ付き出力リングとの係合前に広がる細長いローブを備えるローブ付き表面の例である。デバイスの例示的な実施形態において、ウェーブディスクの外側領域の滑らかな表面は、ウェーブディスクの中心平面から等距離にある両面にある、プレートと呼ぶ軸対称の滑らかな表面と接触する。2つのプレートは、回転的に接続される。その回転軸に沿って見られるとき、ウェーブディスクは、概ね円形の形状であり、その中心を通じる孔を有してよい。中心を通じる孔があるとき、その直径をIDと呼ぶ。ウェーブディスクは、その円周の周りの連続的なリングの材料の平均半径を減少させるために、平坦なディスクコンポーネントのIDを縮小させることによって作られる。その場合、ウェーブディスクのリム(rim)に沿う距離は、投影された半径の円の円周よりも大きく、拘束されていないとき、この過剰な材料は、ウェーブディスクを双曲放物面の形状と類似する形状に自然に変形させ、その中心地点から1つの軸方向に1つの頂上(crest)を備え、他の軸方向に2つの頂上を備える。この自由形状のウェーブは、優先的な円周方向位置を有さず、よって、対称軸に対して法線方向の平面の上に位置しない何れかの平面に最小の軸方向(又は幾分軸方向の又は垂直な)力を適用することによって、新しい位置にグループとして移動させられ得る。2つのプレートの間で圧縮されるとき、最初の接触は各側の2つの頂上で起こるが、プレート間の距離が減少するに応じて、ウェーブの量は離散的な位置で自動的に増分的に増大する。ウェーブディスクの変形された形状は、摺動することなく、円周方向に変位させられ得るので、変形をあちこち動かすのに必要な力は殆どない。2つのプレートと接触するウェーブディスクの外側部分の展開された長さは、プレート上の対応する接触領域の展開された長さよりも長く、従って、ウェーブディスクのセットが外側プレートに対して完全に回転する度に、ウェーブディスクは1回転よりもずっと少ない回転を行う。ウェーブディスクの内側部分に接続されたキャリアプレート上に取り付けられた電磁石は、概ね軸方向において、ウェーブディスクの周りに取り付けられた永久磁石を引き付け且つ反発させて、変形を軸の周りで強制的に回転させる。プレートとウェーブディスクとの間の差動回転は、回転式アクチュエータ又はモータとして用いられ得る。フレックスウェーブ(flex wave)を圧縮する力が増加させられるに応じて、フレックスウェーブは平らになるので、ウェーブディスクの外側部分の展開された長さの値は、プレート上の対応する接触領域の展開された長さの値に近づき、ギア比の増加をもたらす。この増加は、ウェーブディスクが平坦にされた状態で、ギア比が無限になるまで続く。よって、プレート間の距離を変えることによってギア比を変更し得る。
代替的な実施形態では、ウェーブディスク及びプレートの表面は、正の係合を提供するよう本質的に径方向に方向付けられたローブを有する。ウェーブディスクが(複数の)出力部材に対して平坦になる前の、より小さな円周方向の曲率半径の結果としてのプレートのローブとの係合の前に、ウェーブディスクのローブを軸方向に延伸させて、ウェーブディスクの湾曲形状から平坦形状への移行を可能にして、ローブを広げてよい。
代替的な実施形態において、ウェーブディスク及びプレートの表面は、出力部材とのウェーブディスクの自動芯出し作用及び摩擦の増大をもたらすよう、円周方向に方向付けられたV形状のリブを有する。ウェーブディスクのリブの山頂(ピーク)間の距離は、ウェーブディスクがプレートと係合して摩擦を増大させると、湾曲形状から平坦形状に移行する間に減少し、ウェーブディスクがプレートから外れると、平坦形状から湾曲形状に移行する間に増加する。
代替的な実施形態では、2以上(2つ又はそれよりも多く)のウェーブディスク及びプレートセットがあり、ウェーブディスクIDは、トルク容量を増加させるように接続される。
代替的な実施形態では、2以上のウェーブディスク及びプレートセットがあり、ウェーブディスクのIDは、次のウェーブディスクのプレート及びプレートセットに接続されて、全体的な減速比(reduction ratio)を増加させる。
代替的な実施形態では、プレートは一緒に回転するように拘束されない。プレートは、ウェーブディスクの中心について対称的でないように位置付けられる。プレートの非対称性は、それらの間の差動回転を生成する。ウェーブディスクの回転は、2つのプレートの間で差動回転を生成するためだけに用いられ得るし、或いは、ウェーブディスクの回転は、二次的な速度での回転を生成するために用いられ得る。このようにして、2つの出力部材の差動回転は、非常に高い減速比をもたらすことが期待される。
代替的な実施形態では、ウェーブディスクの内側部分に接続されるキャリアプレートに取り付けられる電磁石が、ウェーブディスクの周りに取り付けられた鋼片を軸方向に順次式に引き付け且つ反発させて、変形を軸の周りで強制的に回転させる。
代替的な実施形態では、ウェーブディスクの内側部分に接続されるキャリアプレートに取り付けられる電磁石が、ウェーブディスクの周りに取り付けられる鋼片を径方向に順次式に引き付け且つ反発させて、変形を軸の周りで強制的に回転させる。
代替的な実施形態では、ウェーブディスクの内側部分に接続されるキャリアプレートに取り付けられたる電磁石が、ウェーブディスクの周りに取り付けられる永久磁石を径方向に順次式に引き付け且つ反発させて、変形を軸の周りで強制的に回転させる。
代替的な実施形態では、ウェーブディスクの内側部分に接続されるキャリアプレートに取り付けられる電磁石が、ウェーブディスクの周りに取り付けられる鋼片を円周方向に順次式に引き付け且つ反発させて、変形を軸の周りで強制的に回転させる。
代替的な実施形態では、ウェーブディスクの内側部分に接続されるキャリアプレートに取り付けられる電磁石が、ウェーブディスクの周りに取り付けられる永久磁石を円周方向に順次式に引き付け且つ反発させて、変形を軸の周りで強制的に回転させる。
代替的な実施形態において、ウェーブディスクの形状は、中心線により近い材料を実質的に不変のままにしながら、ウェーブディスクの外側領域にある材料を円周方向に機械的に膨張させることによって生成される。電磁石又は他のアクチュエータは、ウェーブディスクの1つの領域からウェーブディスクの他の領域まで作用して、局所的な領域の曲げを引き起こして、ウェーブの運動を伝搬させ得る。この曲げ変位は、この領域がウェーブの伝播の間に自然に曲がる限り、径方向又は円周方向又はそれらの間であり得る。
代替的な実施形態において、ウェーブディスクの形状は、外側領域にある材料を実質的に不変のままにしながら、ウェーブディスクの内側領域にある材料を円周方向に機械的に収縮させることによって生成される。
代替的な実施形態において、ウェーブディスクは円錐形プロファイルに基づく。
代替的な実施形態では、1つのプレートのみが用いられる。
ウェーブディスクの実施形態が、ID30と、OD32とを有し、IDは、円周方向に圧縮されており、ここではスポーク34を含む、IDから外側のディスク材料は、IDがその円周方向の圧縮荷重を軸方向/円周方向のウェーブ形状に座屈するのを可能にするのに十分な程に、次に、ウェーブ形状は、出力部材に固定される1以上(1つ又はそれよりも多く)の接触リングの間に拘束される。
実施形態は、座屈されたODディスク構成に適用されるとき、この開示に記載される変形の何れかに従って修正されてよい。
図11乃至14の概略的な例示は、本デバイスの1つの例示的な変形に従った円周方向のウェーブ形状の創成を示している。
本明細書で記載する本デバイスの変形の多くは、異なる構成を備える他の実施形態に適用し得る構成を有する。この開示は、組み合わせられてよい様々な実施形態及び変形における本デバイスの様々な構成の例を記載している。
このデバイスに対する他の変形が可能であり、本発明者によって着想されている。この開示は、基本的な動作原理の概要として意図されており、これらの基本的な原理を組み合わせ得る或いは構成し得る方法を全て詳細に記載していない。
本明細書で例示しない変形の例は、1つよりも多くのディスクが軸方向アレイとして配置される多ディスク構成である。 ディスクはトルクを増大させるために並列であってよく、或いはディスクは減速比を増大させるために直列であってよい。
本明細書で例示する示すデバイスのサイズは、3インチ〜10インチの範囲内にあるが、より一層小さなデバイス又はより一層大きなデバイスが本発明者によって想定されている。鍛造によって或いはシリコーン又はCTE差動などによって形成し得る他の材料を用いてこのデバイスの原理に従って微小機械(MEMS)アクチュエータを構築し得る。
本開示に従った直径1〜10メートル又はそれ以上の極めて大きなアクチュエータが、望遠鏡の回転ステージ又は回転運動を必要とする大型機械類のような大規模な用途について想定されるが、それらに限定されない。これらの場合、極めて高い数のウェーブのような特定の実施形態の構成をウェーブリング(波リング)と出力部材との間の円周溝付きのインターフェースと組み合わせることは、追加的な芯出し軸受及び極めて大きなID開口を伴わずに、極めて大きな直径を可能にすることができる。
円周方向において途切れていないリングは、円周方向における圧縮に抗する。この図11乃至図14の概略図において、ODリング32は、実際のリング又は単にディスクのOD区画を表す。円周方向におけるリングの圧縮荷重は、多数の異なる方法で達成され得る。この場合、概ね径方向のスポーク34の長さを減少させることによって、径方向に内向きの力がODリングに加えられる。スポークは、中心に配置される地点から放射し得る(その場合、スポークは、正に径方向に整列される)。IDリングが示されるようアクチュエータの孔を通じる中心を設けるのが有益である。IDリングは、軸方向において剛的又はフレキシブルであり得るが、非限定的にロボットベースのような基準部材の取付けを可能にするよう剛的であるのが好ましい。
スポークの径方向の長さが短くされるとき、ODディスクは、図14に示すように、双曲放物面に類似するもののような低いエネルギ形状を見出す。
この概略図におけるスポーク34は、低摩擦玉継手を備えるリングにリンクされるのが好ましい。他のスポーク構造の非限定的な例は、ODに対して内向きに径方向の張力を創成し、且つウェーブが伝播できるようリングの軸方向移動を可能にする、ケーブル(cables)又はストリング(strings)又はワイヤ(wires)又は撓み部(flexures)を含む。
図示のような本デバイスの他の非限定的な例では、円形の回転対称的なディスクの材料が、例えば、金属又はプラスチック又は複合材料又はセラミックのようなフレキシブルな材料(これらに限定されない)から成形又は旋盤上の回転又は鋳造によって製造される。金属材料は、このデバイスに適すると考えられる。何故ならば、それらは圧縮及び張力の両方において十分なフレキシビリティ(可撓性)及び強度を示し、クリープ(creep)又はコールドフロー(cold flow)しないからである。クリープ及びコールドフローはこの用途において有害な特性である。何故ならば、ディスクは予荷重され、長期間に亘ってその位置に放置されならば、コールドフローする材料がウェーブの位置に向かって偏る傾向がより強いからである。プラスチックは、一般的に鋼よりも安価であり且つ軽量であるが、コールドフロー(クリープ)及びヒステリシス損失を起こしやすい。ニチノールは、その極めて高い疲労寿命及び高い伸び限界の故に、ここでは有用である。
次に、ディスクは、2つのマンドレル36の間で押圧され或いは鍛造され(図15に示す断面図)、マンドレルは、ODリング38との十分な干渉を引き起こさせ、よって、ODリング38に対して十分な力を加えて、ODリングを変形させ(そして、好ましくは、ディスク40の最外側区画をODリングの内側に変形させるが、IDハブ領域42に向かうディスク40の軸方向圧縮及び塑性変形は漸進的により少ないように形作られる)。このコンポーネントは、ODリングの内側へのディスク区画40の径方向張力をもたらす、ODリング38を円周方向に伸ばす塑性変形である。マンドレルが除去されると、ディスクは円周方向にODの周りで自然に座屈し、この開示の他の例に示すような2つの正のウェーブの頂点と2つの負のウェーブの頂点とを備える双曲放物面に類似する形状をもたらす。
必ずしも必要でないが好ましくはディスクの軸方向両側からディスクに、そして、好ましくは、平面的な表面(これに限定されない)のような円形表面を備えるODリング領域だけに、軸方向荷重を適用することによって、円周方向のウェーブは、ディスクを軸方向に圧縮し、ディスクの一方の側の2つの接触ゾーン及びディスクの他方の側の2つの接触ゾーンで予荷重付き牽引又はギア付き又はローブ付きインターフェースをもたらす(ギア付き又はローブ付きインターフェースは予荷重されてもされなくてもよい)。この軸方向の予荷重が2つのウェーブ形状の荷重支持能力(load carrying capacity)を超えて増大すると、ディスクは、図17に概略的に示すような3つのウェーブODリング形状のような増大した荷重をより支持し得る、より低いエネルギ形状を自然に見出す。
この軸方向の予荷重が3つのウェーブ形状の荷重支持能力を超えるまで増加するならば、ディスクは、(予荷重出力リング部材のない)本明細書に概略的に示すような4つのウェーブODリング形状のような増大した軸方向荷重をより支持し得る、より低いエネルギ形状を見出す。これらの概略的なディスクイメージ上の放射状の線は、ウェーブの頂点位置を示すに過ぎないことに留意のこと。ディスクは、継目又は継手のない材料の一体成形品で作られるのが好ましい。切欠き又はスポークは、幾つかの用途において有益で場合ことがあるが、ODリングは、ウェーブの伝播中に十分な円周方向圧縮強度、剛性、及び出力ディスクとの滑らかな相互作用を提供するよう、その円周の周りに少なくとも1つの合理的に途切れていないリングを有するのが好ましい。
ディスクの軸方向荷重が増加すると(軸方向荷重は、好ましくは、(これらの図面の一部においてのみ示される)出力接触リングによって提供される)、それは出力リングの増大した軸方向変位を生成し、ディスク及びウェーブ形状の軸方向圧縮の増大は、ウェーブの数を増やし続ける。
図18乃至25は、予荷重が増大するに応じて起こる、4〜11に連続的に増加したなウェーブの数の非限定的な例である。これらの例は、最大で11のウェーブディスク形状を示しているが、より多数のウェーブが可能であり、より大きな荷重支持能力及び/又は減速比が必要とされる特定の用途及び/又は本デバイスの極めて大径のアクチュエータにおいて有益な場合がある。ウェーブの数が大きければ大きいほど、個々のウェーブはより小さく、ODディスクは、ウェーブの数が増加するに応じてより小さなウェーブが形成するのを可能にするよう、軸方向により薄いことが必要な場合がある。例えば、図示のディスクは、図に示すウェーブの数に達する程に十分に薄くない場合があり、不整列又は製造公差の故に、例えば、6つ又は7つのウェーブで、ウェーブの数の増加が停止する場合がある。
図25は、11のウェーブを備えるディスクを示しており、軸方向荷重部材は、ディスクを拘束している。軸方向荷重部材は、最小の滑りで、妨げられない転がりウェーブ接触伝播(unimpeded rolling wave contact propagation)を可能にするような形状にされるのが好ましい。これは、軸方向荷重部材が出力部材として作用して、様々な用途のための出力回転及びトルクを提供するのを可能にする。軸方向荷重部材は、典型的に、出力リングとして作用し、ハウジング部材(図示せず)に固定される。図26は、図25の断面図を示している。
図27乃至図30の例示的な実施形態において、内側ディスク領域は、内側ディスク領域がよりフレキシブルであることを可能にする切欠き44(cut-outs)を有する。これはODリングに対する力を減少させ、それはODリングが座屈するのを防止する。切欠きの限界はスポークを通じたIDハブへのトルク伝達能力の減少であり、よって、これは最大トルク要件を考慮して設計されなければならない。
図27乃至図30の例は、2つのウェーブディスク形状として示されているが、より多くのウェーブの数を有する形状に予荷重されて(preloaded)よい。
ウェーブフォーム(波形)を伝搬させる例示的な方法を図31乃至図35に示す。ピエゾセラミックス(これに限定されない)のような電気反応性ストリップ46のアレイをディスクの片側又は両側に固定する。これらは、任意の向き又は角度にあってよく、これらは、それらがウェーブディスクに対して力を付与し、それがウェーブを伝播させて出力部材に対してトルクを加えるような方法において通電され(energized)得る限り、実質的に如何なる形状であってもよい 。この非限定的な例において、ピエゾセラミックストリップは、ディスクの両側にあるスポークブレード48に付着させられる。ピエゾストリップは、一方の側から他方の側へ交互に通電されて、ディスクに対して局所的な径方向の曲げモーメントを付与する。ピエゾストリップは、移動が最小にされるIDハブの近くでワイヤ接続されて、ワイヤ及び接続部に対する疲労応力を低減させるのが好ましい。
ピエゾ(又は他の活性材料)ストリップ又はパッチ(又は全表面がピエゾコーティング又はディスクで覆われるならば領域)は、類似の軸方向の力をウェーブの全てに対して同時に加えるような方法において整流される。この力はそれほど大きくなくてよいが(例えば、直径8インチのディスク上でストリップ毎に0.5ニュートン)が、このデバイスで可能な極めて高い減速比及びディスクと出力部材との間の純粋な転がり接触から可能な低摩擦は、多数のピエゾストリップが高周波で作動して、出力部材の1回転毎に大量の入力電力を生成するのを可能にする。ワイヤ接続部50は、ピエゾストリップを電源に接続する。
図33に示すようなオーバーラップする+−電圧正弦波形のような数多くの異なる方法でピエゾストリップの整流を行うことができるが、これに限定されない。図33は、参照番号52A乃至52Iによって示される異なる極についての時間に対する印加電極を示すグラフである。図示の各正弦波は、非正弦波形状でもあってもよいが、単純性のために単純な正弦波を示している。図33によって表される整流戦略は、ピエゾ制御のために示されているが、磁気制御又は多くの他の種類の作動手段のために用いられ得る。図34は、この例におけるウェーブディスク上の極52A乃至52Iの位置を、図33の垂直破線によって印す時点で示している。
図33中の各曲線は、(非限定的な例について、コントローラが、ウェーブディスクに取り付けられる永久磁石のアレイを引き付け且つ反発している電磁石のアレイを駆動しているならば)駆動電流を表し得る。ウェーブディスク上のピエゾセラミックアレイを駆動しているならば、図33に示すウェーブは、各極に印加される電圧を表し得る。極は1よりも多くの磁石又はピエゾ又は他の種類の作動手段から成り得る。図33の非限定的な例は、3つのウェーブ形状を生成するよう軸方向に拘束されたウェーブディスクの両側にある18個のピエゾストリップ(ディスク毎に合計36個のストリップ)に対応する9個の極を有する。3つのウェーブディスクの両側にあるピエゾストリップを用いるならば、1つの極は、好ましくは、ディスクの一方の側で同じ極性にある(120度で増分する)3つの均等に離間したストリップを駆動し、配線の単純性のために、(軸方向に整列された)正反対の3つのピエゾストリップは、反対の軸方向の偏向(deflection)を生成するのに必要な何れの極性にあってもよい。よって、ピエゾの各ペアの両方のピエゾは、それらの間に挟装されたディスクの径方向部分を有し、正及び負の極性の何れかでそれぞれ通電されるときにディスクを同じ方向に変形させるよう作用する。この例では参照番号52Aによって示される第1の極は最大の正電圧であるのに対し、参照番号52Fによって示される第6の極は最大の負電圧にあり、52Hによって表された極8はウェーブの頂点でゼロ電圧にある、等。
ディスクに取り付けられるこれらの同じ(又は別個の)ピエゾアクチュエータ(又はひずみ計のような他のセンサ)をセンサとして用いてコントローラにウェーブディスクの形状及びウェーブの位置についての情報を提供し得ることが留意されなければならない。このデータは、例えば、ウェーブの伝搬角を検知することによるウェーブディスクエンコーダとして、或いは(ウェーブフォームの非対称な変形に基づく)アクチュエータ上のトルクを感知するために用いられ得る。
多くの他の制御戦略又は極の数が発明者によって想定されることが留意されるべきである。これはウェーブディスクウェーブ伝搬をどのように達成し且つ制御し得るかの非限定的な例として与えられているに過ぎない。
コントローラは多くの異なる構成にあり得るが、例えば、アクチュエータ中の位置センサからのフィードバック及びプログラムされたトルク及び/又は動作要求に基づき極のアレイに可変電圧を提供するCPUを含み得る。
図35は、本デバイスを制御してウェーブディスク1上でウェーブを伝播させ得る多くの方法のうちの1つの方法の非限定的な例の簡略図を示している。電源54が、CPU/モータコントローラ56に電力を提供し、CPU/モータコントローラ56は、ピエゾアクチュエータ46のアレイ(ここでは3つのみを示しているが、任意の数を用い得る)に可変電圧を提供する。1以上のひずみ計58又は(フィードバック信号を送信してそれらの偏向を検知し得るピエゾ又は他の種類のアクチュエータの使用を場合によっては含む)他のセンサによってウェーブの位置及びウェーブディスク上のトルクを検知し得る。
このデバイスと共に牽引駆動トルク伝達が用いられるならば、入力と出力との間にエンコーダを有することが好ましい。このエンコーダは、牽引面の予荷重が、ある範囲の速度及びトルク及び温度に亘って予測可能な運動伝達を提供するのに十分であるならば、比較的低い分解能であり得る。非限定的な例について、デジタル出力エンコーダに基づく出力の精度及び正確性を最大にするために、ウェーブディスク上の1以上のひずみ計からの高分解能フィードバックは、レゾルバ型(resolver-type)のフィードバックをモータコントローラに提供する。このフィードバックは、ウェーブディスク形状の変化に関して非常に敏感である傾向があるが、それはウェーブディスクと出力レースとの間の滑りの故に出力回転に対してドリフトする。このデバイスの反復性の故に、この滑り百分率(%)は、ある範囲の動作条件下で経験的に測定されることができ、ディスク上の又はアクチュエータ内のセンサによって検知されるような様々な条件の下でのウェーブディスクと出力リングとの間の滑り量を予測するために用いられることができる。
センサの組み合わせをこのように又は類似の方法で用いることは、ひずみ計又はピエゾ(又は他の比例センサ)をモニタリングすることによって並びにより低い解像度の出力エンコーダからのあらゆるデジタルパルスフィードバック信号の位置をリセットし或いは再較正することによって、極めて精密な制御を可能にする。
低コストの実施形態の一例が図36に示されている。それは、好ましくは離型時に高い収縮百分率を有する材料で作られる、射出成形ディスク60を用いる。そして、(圧縮状態で)より剛的なインサート62のアレイが射出成形中にリング内に成形される。これらのプラグは、永久磁石材料を含む任意の材料から作られ得る。
(好ましくは部品が型内で室温まで冷却された後に)離型されるとき、ディスク材料の収縮は、円周方向により剛的な(圧縮状態の)ODリングを円周方向に座屈させる。図37は、隠れた線が見えるようにされた埋込みインサートの拡大(クローズアップ)を示している。
永久磁石がインサートのために用いられるならば、場合によっては、組み立てをより容易にするために、それらを離型後に磁化し得る。
インサートは、様々な材料特性に依存して、接触しても接触しなくてもよい。インサートは、図38に示すように並びに図39に拡大して示すように、鋼又はチタン等のリング64のような材料の一体成形品であってもよい。インサートリング64は、円周方向に圧縮において剛的であり、より低い熱膨張係数(CTE)を有するので、ディスクが高温での射出成形の後に冷えると、周囲のプラスチックは収縮し、例えば、ばね鋼で作られてよい挿入されたディスクを周方向に座屈させて、ウェーブフォームを創成する。
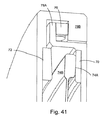
本デバイスの非対称的な実施形態の非限定的な例を図40に示し、拡大を図41に示す。
この実施形態において、基準部材70から出力部材72へのトルク伝達は、ウェーブディスクからハウジング部材への代わりに、ハウジングの一方の側から他方の側へである。ウェーブディスクは、基準部材接触面から出力部材接触面にトルクを依然として伝達しているが、それはいずれにも剛的に取り付けられない。
この実施形態を用いるならば、接触面74Aのうちの1つは、他の接触面74Bと比べて、所与の曲げ半径について、より大きな円周長の変化を可能にするよう構成される。この異なる円周長の変化を数多くの方法で達成し得る。非限定的な例は、溝の間のセグメントが他方の側と比べて一方の側でより円周方向に広がるのを可能にするように、他方の面よりも一方の面においてより深い非円周溝を含む。1つの表面上のより長い歯又はローブは、類似の効果を有し得る。2つの軸方向表面に対する内側ディスクの位置は、接触表面の拡張にも影響を与える。表面は、牽引面又は歯付き又はローブ付き表面であってよい。いずれの場合においても、ディスクの一方の側の接触面からディスクの他方の側の接触面への円周表面の伸長の差は、ウェーブディスクのウェーブが伝搬されるときに、基準面と出力接触面との間の差動回転をもたらすと考えられる。この差動回転は非常に小さく、極めて高い減速比及び出力角の高精度制御を可能にし得る。
幾つかの構成では、1000:1以上の比率が可能であると考えられる。
相対的な回転を可能にするために、2つのハウジング部材78A及び78Bの間にスラスト軸受76が設けられる。ウェーブ伝播手段は示されていないが、本明細書で開示する任意の種類又は開示していない他の種類であり得る。
図40乃至41の差動ウェーブディスクの変形が図42に示されており、ODリングのより大きくオフセットされた側にスロット80を備える。スロット80は、ここに示すような放射状又は螺旋状を含む任意の形状であり得るが、これらに限定されない。スロットの目的は、ギヤ歯のような確実な係合を創り出すことではなく、スロットのない表面と比べてスロット付き表面のより大きな円周方向の拡張を可能にすることである。この効果は、基準レースと出力レースとの間のより大きな差異効果のための、スロットのない表面と比べたときのスロット付き表面のより大きな有効長さの変化であると考えられる。
異なる深さのスロットを両側で用いてよい。スロットは片側又は両側にあってよく、ディスクは対称的又は非対称的であってよい。ディスクは、図43に示すように、他の点では図40乃至図41に示すものと同様に、デバイス内で用いられてよい。
図44乃至図46は、ローブを備えるウェーブディスクODリング82があらゆるウェーブで出力円形ローブリング84上の1以上のローブをどのようにスキップするかを示す、ローブ付き構成の幾つかの追加的な簡略化された部分的に組み立てられた画像である。ここに示すディスクは、両方の軸方向接触面に対称的なローブを有するが、本明細書に開示するこのデバイスの原理に従って、2つのウェーブディスク接触面上のローブの数は異なる数であることができ且つ/或いはそれらは異なる長さであることができる。
追加的な変形
1以上の永久磁石又は電磁石をウェーブディスクと同軸である回転部材に取り付け得る。磁石は、ディスクのウェーブの山頂を引き付け、磁気ディスクが回転させられるときにそれらを伝搬させる。接触するころ軸受又はブッシングでウェーブを伝播させることもできる。空気軸受又は流体動的軸受のような非接触軸受でウェーブディスクのウェーブを伝搬させることができる。液圧及び/又は流体力学的な力を用いて、例えば、圧縮性若しくは非圧縮性の流体慣性又はコアンダ効果を用いて、ウェーブディスクのウェーブを伝搬させることができる。非限定的にニチノール金属のような高いサイクル寿命を備える高弾性材料を用いてよい。ニチノールは、例えば、略等しい原子百分率における、ニッケルチタン合金である。ニチノール又は他の記憶若しくは熱反応性材料を用いて、幾つかの用途のために極めて高い力を提供することができる。この材料を類似の方法において本明細書に記載するピエゾアクチュエータに用いることができ、或いは、初期予荷重及びウェーブ形状を達成するために、ニチノールを、自転車スポークのように張力をかけられたワイヤスポークとして用いることができる。ウェーブ形状がひとたび設定されると、ワイヤを加熱し且つ冷却して、ウェーブを伝搬させることができる。これは、大きな力が必要とされるが高速は重要でない極めて大きな用途について有用な場合がある。
図47は、ディスクの一方又は両方の軸方向側にある永久磁石86及び例えばフレキシブルリングでディスクに取り付けられた電磁石コイル88のアレイを備える実施形態の非限定的な例を示している。これは可動コイルを備えるオーディオスピーカのようにむしろ作動し、潜在的により低い慣性及びより速い応答時間の利点を備える。永久磁石は、例えば、静止的であり、基準部材及び/又は出力部材に固定されてよく、或いは、永久磁石は、ディスクハブ部材に取り付けられてよい。
本明細書に記載する本デバイスの変形の多くは、異なる構成を備える他の実施形態に適用し得る構成を有する。この開示は様々な実施形態及び変形における本デバイスの様々な構成の例を記載するので、当業者は様々な構成を異なる効果と組み合わせ得る。
このデバイスに対する他の変形が可能であり、本発明者によって着想されている。この開示は、基本的な動作原理の概要として意図され、これらの基本的な原理を組み合わせ或いは構成する方法を全て詳細に記載してない。
本明細書で例示しない変形の例は、1つよりも多くのディスクが軸方向アレイとして配置される多ディスク構成である。ディスクは、トルクを増加させるために並列であることができ、或いは、ディスクは、減速比を増加させるために直列であることができる。
ウェーブディスクに関して本明細書で記載する同じ原理の多くは、線形アクチュエータ又は半球アクチュエータに適用されてもよい。
それらは、この開示の原理に従って鍛造された或いは形成されたIDリングを備えるリングアクチュエータに適用されてもよく、径方向ディスク部材の差は、拡張させられたIDリングを円周方向に座屈させるような圧縮荷重にある。その場合には、ODが座屈したウェーブディスクについて記載した方法の何れかに従ってウェーブを伝搬させることができる。
図48及び図49は、3つのウェーブの円周方向に座屈したIDリングディスクの非限定的な簡略化された部分的なアセンブリの例を示している。ディスク90は、内径92で座屈させられ、内側ハウジング94上の出力レースに接続している。
図10は、ディスク上の円周方向に回転させられた隆起部形状26とハウジング/出力接触面上の一致する溝形状28とを用いる2つのハウジング接触レースを備えるウェーブディスクの断面図を示している。溝(grooves)及び隆起部(ridges)の目的は、楔硬化を通じてディスクODリング接触面と(複数の)出力リング接触面との間の接触圧力を増大させることである。ディスクはこの断面において2つの接点の間の中間に示されている。
高い角度は牽引力を劇的に増加させ、係止テーパ角は有益でさえあることがあり、ディスク上の隆起の径方向収縮の故に過度の摩擦なしに働くことがあると考えられる。何故ならば、それらは、出力接触溝と接触するようになる直ぐ前に、最小の径方向ウェーブを受けるからである。これは、接触が行われた後に並びに望ましくない摺動が起こり得る前に、隆起部を径方向に拡張させて溝内に至らせると期待される。接点が接触しないようになるときにディスクが再び曲がると、隆起部の径方向の厚さは、隆起部の円周方向の曲げの故に再び収縮して、隆起部を係止テーパ係合から外す。
図50に示されているのは、本開示の原理を用いる線形アクチュエータ96の簡略化した概略図である。軸受は示していない。フレックスプレート98の外縁は、固定部材又は基準部材に取り付けられた中心線100と比べて直線方向に拡張されている。2つのハウジング部材102は、出力部材である。磁石又はピエゾ等でディスクのウェーブを伝播させることができるのと同じ方法でウェーブを伝播させることができる。フレックスプレート98だけを図51に示している。
ピエゾ又は他の活性材料又は非限定的に油圧若しくは気圧のような他の作動手段でディスクに対してより大きな力を加えるために、スタックの延長が図52に示すようなODリングの軸方向移動をもたらす場所に、ピエゾスタックを配置することができる。対向するスタックを用いて、他の方向に力を提供してよい。この例では、1つのセットの対向するピエゾスタックのみを示しているが、ピエゾスタック(又は他のアクチュエータ手段)のアレイが好ましい。ここではピエゾスタックアクチュエータを一例として示しているが、線形の力を加える任意の種類のアクチュエータを、ここに示すものと類似する幾分径方向の力角度の整列において用い得る。図53は、ピエゾスタックの切欠図を示しており、対向するスタック104A及び104Bをより明確に示している。ピエゾスタックは、滑りのない角度変化を可能にするよう、凸状の湾曲した端を有するのが好ましい。ピエゾスタックの端106は、好ましくは、半球形であり、或いは、ピエゾスタックの凸状湾曲端を受け入れる凹状湾曲受け部材を介してディスクに少なくとも剛的に又はフレキシブルに取り付けられる。図52及び図53のこの構成の利点は、結合されたピエゾストリップ構成と同様に、ピエゾに対する曲げ変位の排除である。これは、ディスクに対する軸方向の力を誘発するよう、径方向の力又は僅かに中心から外れた径方向に近い力を加えることによって、ディスクに対して作用するより一層厚くより強力なピエゾアクチュエータを可能にする。
図54は、(非限定的にピエゾ又は液圧若しくは気圧のような)任意の径方向若しくは概ね径方向に膨張する種類の1以上のアクチュエータ又は任意の種類の電気活性若しくは磁歪若しくは熱膨張若しくはメモリ金属材料がどのように膨張又は収縮して軸方向のウェーブ伝搬効果を生成し得るかの非限定的な例の簡略化された部分的な概略を示している。この構成の特徴は、(ここではアクチュエータのID端に示されているが、ODの端にあってもよく、両方にあってもよい)オフセットの角度ができることである。
線形実施形態の追加的な非限定的な例
図55は、ウェーブフォイル(波フォイル)(wave foils)の表面に接着された電気活性ウェーブ伝播素子を備える線形ウェーブプレート(又はフォイル)の簡略化された概略的で非限定的な例を示している。フォイルは、固定コアの周りにウェーブプレートアレイ110を形成するように配列され、フォイルのアレイ上のウェーブが調和して伝搬させられるときに、出力面112のアレイが動く。図56は、同じ設計の端面図を示している。
図57乃至図59は、外側部材に固定されたウェーブフォイルを備える本デバイスの原理に従った線形アクチュエータを示している。本発明者によって予想される線形実施形態の様々なコンポーネントを構成する多くの方法がある。この例では、1以上のウェーブフォイルが、互いにある角度(90度が最も効果的であるが、他の角度も異なる効果を伴って機能し得る)に位置付けられる好ましくは2以上のウェーブフォイルを備える可動な外側部材114に取り付けられて、固定/基準スパー116を2つの平面内で中心化する(各平面はウェーブフォイルの長手方向に対して垂直である)。
図60及び図61は、本開示に従ったウェーブフォイルの実施形態の簡略化された概略の部分図を示している。アクチュエータが取り付けられるプレートの長手方向の曲げが低減された(この開示における様々なウェーブ創成構造及び方法のうちの1以上に従った)ウェーブ生成を可能にするために、活性材料曲げアクチュエータ120の間にスロット118が設けられている。ピエゾ(又は他の活性材料)を用いて(複数の)ウェーブを伝搬させる実施形態において、アクチュエータは、横方向の曲げよりも長手方向(この例では、プレートでなくて、アクチュエータについての長手方向)の曲げにより適している。フォイル内のスロットは、ここに示すものと同様に、アクチュエータの横方向の曲げを減少させる。
半円形アクチュエータの非限定的な例
本明細書で開示するような本デバイスの1以上の構成を、限定された角距離に亘って作動する半円形デバイスに適用することができる。ここで、「半円形」は、半円に限定されず、円の任意の部分を指すと理解される。そのようなシステムの利点は、構造体又は本体を部分的に取り囲み、それにトルクを加える能力である。非限定的な例は、半円形アクチュエータが使用者の(例えば、非限定的に、アクチュエータが使用者の肩関節と同じ枢動場所を共用する肩関節のような)関節を部分的に取り囲むことができる外骨格上での使用を含むが、それに限定されない。他の例は、必要な動きを提供するために40〜70度の回転のみを必要とする、動力供給される開放端ラチェットレンチである。
図62A及び図62Bは、それぞれ、ウェーブ形状を創成する前の応力を受けていないフォイル形状の頂面図及び端面図である。これらは円弧フォイルの部分断面でないことに留意のこと。円弧は任意の角度であり得る。ここでは、部分ディスクフォイル構成の例として、90度フォイルが示されている。また、ウェーブは半円形ウェーブフォイルのID及び/又はOD上にあり得る。
ウェーブは、図63及び図64に示すように、ウェーブ形成されたフォイル124が静止している箔122の上に重ねられた状態で、フォイルの非ウェーブ縁を僅かに真っ直ぐにすることによって創成される。
図65は、2つの出力面126の間に挟装された上記の半円形のウェーブフォイルの簡略化された不完全なアセンブリを示している。出力面も、好ましくは、円弧形状であり、完全な円又はここに示すような半円であり得る。
図66に示す例示的な実施形態では、湾曲した半円形のウェーブフォイルは、静止しているときに平面的であり、次に、2つの平面において湾曲させられる。それを僅かに真っ直ぐにすることは、初期的なウェーブフォームを創成する。それを第1の平面まで90度(又は他の角度も機能し得る)で湾曲させることは、ウェーブが同心円状の表面(ここでは円筒形であるが、円錐形でもあり得る)の間に伝播するのを可能にする。ここに示しているのは、平面的である右側にある静止フォイル122であり、僅かな曲率(及び好ましくは予荷重されるときにそれが固定されるより厚い断面)を備える。左側にあるのは、方向1において真っ直ぐにし、方向2において弧状に曲げた後の、同じフォイル124である。同心円状の出力面は、好ましくは、互いに接続され、ウェーブが他のウェーブ部材の実施態様について本明細書に記載した手段によって伝播させられるときに、共通の円弧中心の周りで回転する。
ウェーブディスクアクチュエータのディスクの実施形態について記載した構成及び方法のうちの1以上がウェーブフォイルの実施形態に当て嵌まり得ることが留意されなければならない。これらは以下を含むが、それらに限定されない。
電磁石整流によるウェーブの伝播。
電気活性材料のような活性材料によるウェーブの伝播(電気活性材料に限定されない)。
より低い熱膨張係数を有するウェーブ縁に沿って材料の1以上のインサートで冷却されるときに収縮する材料の成形を含む構造技術(そのような材料の成形に限定されない)。
例えば、一方又は両方の平面的な表面部材上の又は一方又は両方の平面的な表面部材に取り付けられる、電磁石アレイの整流を用いて、ウェーブディスク及びウェーブディスク上のインサート又はウェーブディスクの磁石及び/又は軟磁性部分を軸方向に引き付け且つ/或いは反発させて、1以上のウェーブの頂点を保持し或いは移動させる。ギア付きインターフェースが用いられるならば、ウェーブの頂点は、平面的な表面部材に対するウェーブディスクの回転角に比例して移動する。ウェーブと平面的な表面との間の接触が摩擦又は牽引インターフェースであるならば、平面的な表面部材に対するウェーブディスクの回転及びウェーブ伝搬角は可変である。両方の場合では、センサを用いて電磁石及びウェーブの頂点の角位置を決定し得る。ウェーブの頂点より前方のウェーブディスクに対する軸方向の力は、ウェーブの頂点をその方向に引っ張る。ウェーブの頂点より後方のウェーブディスクに対する反発力は、ウェーブより前方の引付力と同じ方向にウェーブを整流する。
本開示に従ったウェーブディスク128の非限定的な例示的な実施形態が、好適な構造を備えて図67に示されている。それは好ましくは内側ディスク領域の両側に接着されたピエゾ又は他のバイモルフアクチュエータ130を用いる。内側ウェーブディスク領域の円周方向のフレキシビリティが増大させられるように、径方向切欠132が配置される。アクチュエータの径方向収縮がディスクをそのアクチュエータに向かって軸方向に変形させるように、バイモルフアクチュエータのアレイが(複数の)ウェーブディスク表面に取り付けられる。アクチュエータに対する応力及び円周方向の変形を減少させるために、内側ディスク領域にある径方向切欠き134が、アクチュエータの全部又は好ましくは少なくともアクチュエータの外側端のために、アクチュエータの円周方向の幅内に配置される。これは、アクチュエータが取り付けられるスポークの最外端部が、内側ウェーブディスクの円周方向の変形がウェーブ伝搬中にアクチュエータに対する応力及び円周方向の変形を引き起こすのを減少させる撓み部として作用するのを可能にする。図68は、アクチュエータの円周方向の幅内に配置される径方向切欠き134の詳細図を示している。
図69は、ウェーブディスクのための回転入力構成の例示的な実施形態の簡略化された部分的なアセンブリを示している。それは回転部材136を有し、回転部材136は永久磁石138を収容し、永久磁石はそれと共に回転し、ウェーブを引っ張る。
図70は、接触する転がりウェーブ伝搬部材(contacting rolling wave propagation member)を備える回転する入力部材(spinning input member)の一例を示している。回転部材136内のホイール140がウェーブディスクと接触して、ウェーブを伝搬する。
軸方向ローブ(AXIAL LOBES)
図71及び図72は、軸方向のローブ付きウェーブディスク142の非限定的な例示的な実施形態の部分的なアセンブリの詳細図を示している。この例における両方の出力リング144は、互いから一定の軸方向距離にあり、アクチュエータ中心軸の周りの同時回転のために接続されている。出力部材は、ウェーブディスクがそれらの間に挟装された状態で、互いに向かって軸方向に予荷重されるのが好ましい。これは、好ましくは係合毎に3以上(3つ又はそれよりも多く)のローブ先端のために(幾つかの条件の下では3つより多い又は少ない歯が有益なことがある)、ウェーブディスクのローブ先端を出力リング上の平面的な(又は円錐状の)のローブ根元(lobe roots)に合致させる。
係合する3以上のローブ先端の利点は、ディスクが出力リングに対して軸方向に「平らになる」ときに、各ローブ先端が非接触から接触に滑らかに移行することである。
この平坦化の他の有益な効果は、(より小さな曲率半径の円周方向ウェーブ区画での)接触の直前のディスクの弾性変形の増加である。これはローブ先端を広げて係合の直前にディスクローブ先端間の円周方向の距離を増加させる効果を有する。ローブは、従来的なインボリュート(involute)歯プロファイルよりも軸方向により長い。正確な長さは、各用途について分析及び/又は試験によって決定される必要があるが、本発明者は、2:1と6:1の間のどこかのローブ軸方向長さ対幅のアスペクト比が所望の結果をもたらし得ることを見出した。しかしながら、特定の用途では、より小さい又はより大きいアスペクト比も機能することがある。
細長いローブおよびローブ先端の広がりの結果は、ディスクローブの先端が出力リングのローブ根元の底により近くなるまでの、出力のローブ根元とのディスクローブ先端の接触の遅延である。これの利益は、ディスクローブ先端及び出力リングローブ根元の滑りの減少である。より少ない滑りは、摩擦の減少及び特定の用途における潤滑剤なしの作動の可能性をもたらす。
図71に示すように、ディスク上のリングの軸方向予荷重の故に、ディスクの(参照番号46によって示すような)接触領域は出力リングに適合する。軸方向変位に起因するディスクの最小の/最も厳しい(tightest)曲率は、参照符号148によって示すように、ディスクがリングと係合する直前に起こる。これは、軸方向に細長いディスクローブを円周方向に広がらせ、ディスクローブ先端がリングローブ根元により完全に係入するまで、ディスクローブ先端がリングローブ根元と接触するのを遅延させる。
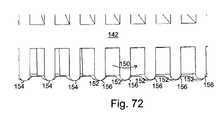
図72は、好ましくはディスクローブ先端がリングローブ根元になるまで、ディスクローブ先端がリングローブと接触するのを防止するローブ先端の遊びを示す、図71の実施形態の詳細図である。図72に示すように、ウェーブが伝搬させられるときに、参照番号150で印す矢印によって示す円周方向における広がり効果(splaying effect)をもたらすよう、ディスクローブは軸方向に細長くされる。この広がり効果は、ディスクローブ直前の最も厳しい曲率がリングローブ根元と接触するときに最大です。その結果は、ディスクが接触ゾーン内のリングと適合するまでの、参照番号152によって印す場所での接触の遅延であり、接触ゾーンにおいて、曲率は減少され、ローブ先端は参照番号154によって印す場所で滑りの減少を伴ってトルクを伝達する。ローブは、好ましくは、参照番号156で印す場所で接触しない。1つの出力部材にあるローブは、対向する出力部材(h2)にあるローブよりも、例えば、10%だけ長くてよい(h1)。ウェーブディスクの一方の軸方向側の歯又はローブは、図71に示すようにウェーブディスクの他方の軸方向側の歯よりも軸方向に長くてよい。より長い歯は、他の歯と同じ数であってよいが、異なる円周方向ピッチを有してよく、或いは、より長い歯は、他の歯と同じ円周方向ピッチを有してよいが、異なる数を有してよい。歯ピッチ及び数の他の変形が可能であり、差動出力構成の目的は、ウェーブディスクと1つの出力部材との間の動きの比が、ウェーブの伝搬中にウェーブディスクと他の出力部材との間の動きの比と僅かに異なることである。
ディスクは、ディスクと出力部材又は基準部材との間の接触面のうちの1以上の上にポリマのような非金属接触面を備えるニチノールのような金属材料で作られてよい。これは、騒音の減少及び/又は牽引力の向上をもたらす。例えば、ナイロン上のアルミニウムは、アルミニウムをかじることのなく高い摩擦を提供し得る特異な組み合わせである。多くの他の材料の組み合わせを用い得る。高デュロメーターウレタンは、低い転がり抵抗のための低いヒステリシス、高い牽引力、及び弾力を提供し得る他の材料である。弾性材料が用いられるならば、ウェーブディスク接触面は、牽引力を増加させるよう滑らかでない仕上げを有し得る。
ディスクは、第1の熱膨張係数(CTE)を有する材料の射出成形部品で作られてよいが、ディスクのOD付近により低い熱膨張係数(CTE)を有する埋込みリングを備える。射出成形ディスクが(好ましくは型内で)冷えると、射出成形材料が冷えるときに創成される径方向内向きの張力は、円周方向に座屈させられたウェーブフォームを引き起こし且つ維持するよう、アクチュエータの動作温度で十分である、下方CTEリング上の円周方向の圧縮荷重を創成する。
製造方法において、ディスク内のウェーブの創成は、外側リングのより大きな軸方向の塑性圧縮変形によって行われてよい。これは、外側リングを円周方向に座屈させる地点まで、外側リングを円周方向に伸長させる。外側リング全体の軸方向の塑性圧縮変形は、単一の又は多数の(鍛造のような)圧縮手順を用いて一度に行われることができ、或いは、それは、外側ウェーブリングを順次的に円周方向に伸長させるローラの1以上のセットで外側リングをロール成形する(roll forming)ことによって行われることができる。ディスクは、ロール成形によって作られてもよい。
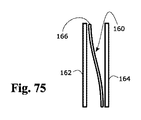
図73乃至図75を参照すると、ウェーブアクチュエータの製造方法が示されている。ディスク160は円周を備え、ディスクは初期状態にあり、典型的には平坦である。ディスクは、図74に示すように、ディスクを座屈させ、ウェーブを備えるウェーブ形状を形成するよう、ディスクに亘る張力及び円周に沿う圧縮状態で荷重される。ディスク160は、ウェーブがディスクに沿って伝搬させられるときに、ディスクから出力部材に力を伝達し得るよう、出力部材は1以上のウェーブの頂点でディスクと接触した状態で、出力部材162,164の間に拘束される。出力部材は、ディスク部材に十分な力を加えて、ウェーブ円周が圧縮状態で荷重されるときに並びに出力部材と接触する前に、その初期状態からのウェーブの数を増加させる。ディスク及び出力部材は歯を備えてよく、ディスク及び出力部材のそれぞれの歯は噛み合う。ディスクに亘る張力及び円周に沿う圧縮状態でディスクを荷重することは、ディスクにリング166を提供することを含んでよく、ディスク160及びリング166は、異なる熱膨張係数の材料で作られ、ディスク及びリングを異なって膨張又は収縮させるように設定された温度にディスクを晒す。
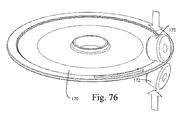
図76は、ロール成形製造方法の概略図を示している。回転対称のディスク170が製造され、次に、増大する軸方向の力がローラ172を通じて加えられる間に、その軸の周りで回転させられる。ローラ172の接触力は、リングの塑性変形限界を超えるのに十分である。これは最低のエネルギ状態が円周方向に座屈させられたウェーブである地点までリングを伸長させる。
請求項において、「含む」(“comprising”)という用語は、その包括的な意味で用いられており、存在する他の要素を排除しない。請求項構成の前の不定冠詞「a」及び「an」は、構成の1以上が存在することを除外しない。本明細書で記載する個々の構成の各々は、1以上の実施形態において用いられてよく、本明細書に記載されているという理由のみで、請求項によって定められる全ての実施形態に必須であると解釈されてならない。