JP2018107366A - Substrate processing apparatus - Google Patents
Substrate processing apparatus Download PDFInfo
- Publication number
- JP2018107366A JP2018107366A JP2016254689A JP2016254689A JP2018107366A JP 2018107366 A JP2018107366 A JP 2018107366A JP 2016254689 A JP2016254689 A JP 2016254689A JP 2016254689 A JP2016254689 A JP 2016254689A JP 2018107366 A JP2018107366 A JP 2018107366A
- Authority
- JP
- Japan
- Prior art keywords
- exhaust
- flow rate
- substrate processing
- robot
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
本発明は、複数の基板処理部に半導体ウェハーや液晶表示装置用ガラス基板等の薄板状精密電子基板(以下、単に「基板」と称する)を順次に搬送して当該基板に処理を行う基板処理装置に関する。 The present invention provides a substrate processing for processing a substrate by sequentially transporting a thin plate precision electronic substrate (hereinafter simply referred to as “substrate”) such as a semiconductor wafer or a glass substrate for a liquid crystal display device to a plurality of substrate processing units. Relates to the device.
この種の装置の一例として、基板にレジスト塗布処理を行い、レジスト膜が形成された基板を別体の露光機で露光し、露光後の基板の現像処理を行う基板処理装置(いわゆるコータ・デベロッパ)が知られている。特許文献1には、基板にレジスト塗布処理を行うスピンコータ、露光後の基板に現像処理を行うスピンデベロッパ、および、基板に熱処理を行う熱処理ユニット等の複数の基板処理部とともに、それら複数の基板処理部に基板を搬送する搬送ロボットを搭載した基板処理装置が開示されている。
As an example of this type of apparatus, a substrate processing apparatus (so-called coater / developer) that performs a resist coating process on a substrate, exposes the substrate on which the resist film is formed with a separate exposure machine, and develops the exposed substrate. )It has been known.
特許文献1に開示されるような基板処理装置においては、複数の基板処理部に沿って設けられた搬送路上を搬送ロボットが往復移動しつつ、それら複数の基板処理部に基板を順次に搬送している。搬送ロボットが移動する際には搬送ロボットの駆動機構等からパーティクルが発生するおそれがあるため、搬送路の下方に排気機構を設けて搬送路上の搬送ロボット周辺の雰囲気を装置外に排出するようにしている。
In a substrate processing apparatus as disclosed in
しかしながら、搬送路上の搬送ロボット周辺においては、搬送ロボット自体が排気の障害となって円滑な排気を行うことが出来ずにパーティクルの巻き上がりが発生することがあった。搬送ロボットの周辺でパーティクルが巻き上がると、そのパーティクルが搬送ロボットによって搬送中の基板に付着して当該基板を汚染するという問題が生じる。 However, in the vicinity of the transfer robot on the transfer path, the transfer robot itself becomes an obstacle to exhaust, and smooth exhaust cannot be performed, and particles may roll up. When particles are rolled up around the transfer robot, there is a problem that the particles adhere to the substrate being transferred by the transfer robot and contaminate the substrate.
本発明は、上記課題に鑑みてなされたものであり、搬送ロボット周辺でのパーティクルの巻き上がりを防止することができる基板処理装置を提供することを目的とする。 The present invention has been made in view of the above problems, and an object of the present invention is to provide a substrate processing apparatus that can prevent particles from rolling up around the transfer robot.
上記課題を解決するため、請求項1の発明は、複数の基板処理部に基板を搬送して当該基板に処理を行う基板処理装置において、前記複数の基板処理部に沿って延設された搬送路上に設置され、前記複数の基板処理部に対して基板を搬送する搬送ロボットと、前記搬送路に沿って前記搬送ロボットを移動させる駆動機構と、前記搬送路の下方に形設された複数の排気口に1対1で対応して設けられ、前記搬送路上の雰囲気を前記複数の排気口を介して排出する複数の排気部と、前記複数の排気部の排気流量を個別に制御する排気制御部と、を備え、前記排気制御部は、前記複数の排気口のうち前記搬送路上における前記搬送ロボットの位置に最も近い排気口における排気流量が他の排気口についての排気流量である基準排気流量よりも大きな第1排気流量となるように前記複数の排気部を制御することを特徴とする。
In order to solve the above-mentioned problem, the invention of
また、請求項2の発明は、請求項1の発明に係る基板処理装置において、前記排気制御部は、前記複数の排気口のうち前記搬送路上における前記搬送ロボットの位置に2番目に近い排気口における排気流量が前記基準排気流量よりも大きな第2排気流量となるように前記複数の排気部を制御することを特徴とする。 According to a second aspect of the present invention, in the substrate processing apparatus according to the first aspect of the invention, the exhaust control unit is an exhaust port that is second closest to the position of the transfer robot on the transfer path among the plurality of exhaust ports. The plurality of exhaust sections are controlled so that the exhaust flow rate at the second exhaust flow rate is larger than the reference exhaust flow rate.
また、請求項3の発明は、請求項2の発明に係る基板処理装置において、前記第1排気流量は前記第2排気流量よりも大きいことを特徴とする。 According to a third aspect of the present invention, in the substrate processing apparatus according to the second aspect of the invention, the first exhaust flow rate is larger than the second exhaust flow rate.
請求項1から請求項3の発明によれば、複数の排気口のうち搬送路上における搬送ロボットの位置に最も近い排気口における排気流量が他の排気口についての排気流量よりも大きくなるため、搬送路上に排気の障害となる搬送ロボットが存在していても、搬送ロボット周辺の雰囲気を強く排気することができ、搬送ロボット周辺でのパーティクルの巻き上がりを防止することができる。 According to the first to third aspects of the present invention, since the exhaust flow rate at the exhaust port closest to the position of the transfer robot on the transfer path among the plurality of exhaust ports is larger than the exhaust flow rate for the other exhaust ports, Even if there is a transfer robot that becomes an obstacle to exhaust on the road, the atmosphere around the transfer robot can be exhausted strongly, and particles can be prevented from rolling up around the transfer robot.
以下、図面を参照しつつ本発明の実施の形態について詳細に説明する。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
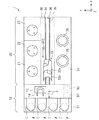
図1は、本発明に係る基板処理装置1全体の平面図である。基板処理装置1は、インデクサブロック10と処理ブロック20とを備える。インデクサブロック10と処理ブロック20とは互いに隣接して設けられている。なお、図1および図2にはそれらの方向関係を明確にするためZ軸方向を鉛直方向とし、XY平面を水平面とするXYZ直交座標系を付している。
FIG. 1 is a plan view of an entire
インデクサブロック10は、装置外から受け取った未処理の基板Wを処理ブロック20に搬入するとともに、処理ブロック20での処理が終了した基板Wを装置外に搬出する。インデクサブロック10は、複数のキャリアC(本実施形態では4個)を並べて載置する載置台11と、各キャリアCから未処理の基板Wを取り出すとともに、各キャリアCに処理済みの基板Wを収納するインデクサロボット12と、を備えている。
The
インデクサブロック10の載置台11に対しては未処理の複数枚の基板Wを収納したキャリアCがAGV(automated guided vehicle)等の無人搬送機構によって搬入される。また、処理済みの複数枚の基板Wを収納したキャリアCもAGV等によって搬出される。なお、キャリアCの形態としては、基板Wを密閉空間に収納するFOUP(front opening unified pod)の他に、SMIF(Standard Mechanical Inter Face)ポッドや収納基板Wを外気に曝すOC(open cassette)であっても良い。
A carrier C storing a plurality of unprocessed substrates W is loaded into the mounting table 11 of the
インデクサロボット12は、矢印AR1に示すように、図示省略の駆動機構によって載置台11の側方をキャリアCの並び方向(Y軸方向)に沿って水平移動可能に構成されている。インデクサロボット12は保持アーム14を備えており、保持アーム14は鉛直方向(Z軸方向)の昇降動作、鉛直方向に沿った軸心周りでの旋回動作および旋回半径方向に沿ったスライド移動が可能に構成されている。よって、保持アーム14は、Y軸方向に沿った水平移動、昇降移動、水平面内の旋回動作および旋回半径方向に沿った進退移動を行う。これにより、インデクサロボット12は、保持アーム14を載置台11上の各キャリアCにアクセスさせて未処理の基板Wの取り出しおよび処理済みの基板Wの収納を行うことができるとともに、処理ブロック20に対する基板Wの授受を行うことができる。
As indicated by an arrow AR1, the
インデクサブロック10に隣接して処理ブロック20が配置されている。インデクサブロック10と処理ブロック20との間には雰囲気分離のための隔壁が設けられるとともに、その隔壁の一部に双方のブロック間での基板受渡のためのパスが設けられている(いずれも図示省略)。
A
処理ブロック20においては、搬送ロボットTRが移動するための搬送路30を挟んで両側に熱処理部群と液処理部群とが対向して配置されている。搬送路30の(+Y)側に熱処理部群が配置されるとともに、(−Y)側に液処理部群が配置されている。熱処理部群としては、熱処理部21,22,23が設けられている。熱処理部21,22,23のそれぞれは基板Wを加熱するためのホットプレートまたは基板Wを冷却するためのクールプレートを備える。また、液処理部群としては、スピンナー24が設けられている。スピンナー24は、スピンチャック25によって回転可能に保持された基板Wの表面にフォトレジスト等の塗布液を吐出するスピンコータまたは現像液を供給するスピンデベロッパを備える。
In the
処理ブロック20においては、熱処理部21,22,23およびスピンナー24からなる複数の基板処理部に沿ってX軸方向に搬送路30が延設されている。搬送路30上には搬送ロボットTRが設けられている。図2は、搬送路30上に設けられた搬送ロボットTRの側面図である。搬送路30には、その長手方向(X軸方向)に沿って平行にガイドレール34およびボールネジ35が設けられている。搬送ロボットTRのベース部31には、ボールネジ35が螺合されるとともに、ガイドレール34が摺動自在に挿通している。駆動モータ36がボールネジ35を正または逆方向に回転させることによって、搬送ロボットTRがガイドレール34に案内されて図1の矢印AR2に示すように、搬送路30に沿ってX軸方向に往復移動する。なお、搬送ロボットTRの駆動機構は、ベルト駆動機構やリニア駆動機構等の他の機構であっても良い。
In the
ベース部31には、鉛直方向に沿った軸心周りにて旋回可能に回転台32が設けられている。回転台32には、基板Wを保持可能な2つの保持アーム33a,33bがそれぞれ独立して水平方向にスライド移動可能に搭載されている。2つの保持アーム33a,33bは互いに上下に近接した位置に設けられている。ベース部31には回転台32を回転する駆動部が設けられ、回転台32には保持アーム33a,33bを回転台32の旋回半径方向にスライド移動する駆動部が内蔵されている(いずれも図示省略)。よって、保持アーム33a,33bのそれぞれは、X軸方向に沿った水平移動、昇降移動、水平面内の旋回動作および旋回半径方向に沿った進退移動を行う。これにより、搬送ロボットTRは、2個の保持アーム33a,33bをそれぞれ個別に複数の基板処理部のいずれかにアクセスさせて、それらとの間で基板Wの授受を行うとともに、インデクサブロック10に対する基板Wの授受を行うことができる。
The base 31 is provided with a
図2に示すように、搬送路30の下方には複数(本実施形態では5個)の排気口51a,51b,51c,51d,51eが形設されている。5個の排気口51a,51b,51c,51d,51eの形設位置は特に限定されるものではなく、例えば搬送ロボットTRが各基板処理部と基板Wの受け渡しを行う際に停止する停止位置の下方に設けられていても良いし、搬送路30の長手方向に沿って等間隔で形設されていても良い。
As shown in FIG. 2, a plurality (five in this embodiment) of
5個の排気口51a,51b,51c,51d,51eに1対1で対応して5個の排気ファン52a,52b,52c,52d,52eが設けられている。排気ファン52a,52b,52c,52d,52eが回転することによって、対応する排気口51a,51b,51c,51d,51eから搬送路30上の雰囲気が排出される。排気口51a,51b,51c,51d,51eからの排気流量は対応する排気ファン52a,52b,52c,52d,52eの回転数によって規定される。すなわち、排気ファン52a,52b,52c,52d,52eの回転数が多くなるほど、対応する排気口51a,51b,51c,51d,51eからの排気流量も大きくなる。なお、排気口51a,51b,51c,51d,51eを特に区別する必要の無い場合は単に排気口51を総称し、同様に排気ファン52a,52b,52c,52d,52eを特に区別する必要の無い場合は単に排気ファン52と総称する。
Five
搬送路30の上方には図示を省略するファンフィルタユニットが設置されており、当該ファンフィルタユニットから下方に向けて清浄なクリーンエアが送出される。搬送路30の上方から下方に向けてクリーンエアを送出するとともに、排気口51から搬送路30上の雰囲気を排出することにより、搬送路30には上方から下方へと流れるダウンフローが形成される。これにより、搬送路30に存在するパーティクルは排気口51から排出されることとなる。
A fan filter unit (not shown) is installed above the
また、基板処理装置1には、ロボットコントローラ91およびメインコントローラ92の2つの制御部が設けられている。ロボットコントローラ91およびメインコントローラ92のハードウェアとしての構成は一般的なコンピュータと同様である。すなわち、ロボットコントローラ91およびメインコントローラ92はそれぞれ、各種演算処理を行う回路であるCPU、基本プログラムを記憶する読み出し専用のメモリであるROM、各種情報を記憶する読み書き自在のメモリであるRAMおよび制御用ソフトウェアやデータなどを記憶しておく磁気ディスクを備えている。
Further, the
ロボットコントローラ91は、主に搬送ロボットTRの動作を制御するために制御部である。また、ロボットコントローラ91は、駆動モータ36に付設されたエンコーダ(図示省略)の計測値に基づいて搬送路30上における搬送ロボットTRのX軸方向に沿った位置情報を取得する。
The
一方、メインコントローラ92は、基板処理装置1全体を管理するための制御部であり、ロボットコントローラ91の上位コントローラでもある。メインコントローラ92は、下位のロボットコントローラ91に指示を与えるとともに、5個の排気ファン52a,52b,52c,52d,52eの回転数を個別に制御することによって、5個の排気口51a,51b,51c,51d,51eにおける排気流量を個別に制御する。メインコントローラ92は、基板処理装置1の外壁面に設けられた操作パネル(図示省略)とも接続されている。基板処理装置1のオペレータは、当該操作パネルからメインコントローラ92にコマンドやパラメータを入力することができるとともに、メインコントローラ92が操作パネルに表示した情報を確認することができる。なお、図1では、ロボットコントローラ91およびメインコントローラ92がインデクサブロック10に設けられているが、これに限定されるものではなく、両コントローラの設置位置は適宜のものとすることができる。
On the other hand, the
次に、基板処理装置1の動作について説明する。基板処理装置1においては、インデクサロボット12がキャリアCから取り出した未処理の基板Wを処理ブロック20の搬送ロボットTRに渡す。続いて、搬送ロボットTRがその基板Wを複数の基板処理部(熱処理部21,22,23およびスピンナー24)に順次に搬送し、各基板処理部が基板Wに所定の処理を施すことによって、当該基板Wに対する一連の基板処理が進行する。一連の基板処理が完了した基板Wは搬送ロボットTRからインデクサブロック10のインデクサロボット12に渡され、インデクサロボット12によってキャリアCに格納される。
Next, the operation of the
上記一連の基板処理を行う過程で搬送ロボットTRは搬送路30上にて往復移動を繰り返す。搬送ロボットTRが搬送路30上を移動すると、搬送ロボットTRの駆動機構(駆動モータ36、ガイドレール34およびボールネジ35)からパーティクルが発生することがある。このため、基板処理装置1においては、搬送路30の上方から下方に向けてクリーンエアを送出するとともに、排気ファン52を作動させて排気口51から搬送路30上の雰囲気を排出することにより、駆動機構から発生したパーティクルを装置外に排出するようにしている。以下、特に、5個の排気口51a,51b,51c,51d,51eによる排気の動作について説明を続ける。
In the course of performing the above series of substrate processing, the transfer robot TR repeats reciprocating movement on the
図3は、搬送ロボットTRが排気口51bの直上に位置しているときの排気動作を模式的に示す図である。搬送路30上における搬送ロボットTRの位置情報はロボットコントローラ91によって取得され、ロボットコントローラ91から上位のメインコントローラ92に伝達される。メインコントローラ92は、ロボットコントローラ91から伝達された搬送ロボットTRの搬送路30上における位置情報に基づいて、5個の排気口51a,51b,51c,51d,51eのうちいずれの直上に搬送ロボットTRが位置しているかを特定する。
FIG. 3 is a diagram schematically illustrating an exhaust operation when the transport robot TR is located immediately above the
搬送ロボットTRが搬送動作の過程で例えば排気口51bの直上に位置しているときには、その排気口51bを除く他の4個の排気口51a,51c,51d,51eについては、メインコントローラ92の制御によって排気流量が予め定められた標準の排気流量である基準排気流量とされている。具体的には、排気口51a,51c,51d,51eからの排気流量が基準排気流量となるように、メインコントローラ92が排気ファン52a,52c,52d,52eの回転数を制御する。基準排気流量は、排気口51の上方に特段の障害がなければ、搬送路30からパーティクルを排出するのに十分な排気流量である。なお、搬送ロボットTRが排気口51bの直上に位置しているときとは、搬送ロボットTRが排気口51bの直上で停止しているときと移動中に排気口51bの直上を通過している時点の双方を含む概念であり、以降においても同様である。
For example, when the transport robot TR is positioned immediately above the
一方、メインコントローラ92は、搬送ロボットTRの直下に位置することとなる排気口51bにおける排気流量が上記基準排気流量よりも大きくなるように、排気ファン52bの回転数を制御する。搬送ロボットTRが直上に存在している排気口51bから基準排気流量にて排気を行ったとしても、搬送ロボットTR自体が排気の障害となって円滑な排気を行うことが出来ずにパーティクルの巻き上がりが発生することがある。本実施形態のように、搬送ロボットTRが直上に位置している排気口51bにおける排気流量を他の4個の排気口51a,51c,51d,51eにおける排気流量よりも大きくすることにより、搬送ロボットTR周辺の雰囲気を強く排気口51bから排気することができ、搬送ロボットTR周辺でのパーティクルの巻き上がりを防止することができる。
On the other hand, the
次に、図4は、搬送ロボットTRが隣り合う排気口51bと排気口51cとの中間よりも排気口51b寄りに位置しているときの排気動作を模式的に示す図である。同図は、例えば搬送ロボットTRが排気口51bの直上から若干隣の排気口51cに向けて移動した状態である。図4においては、5個の排気口51a,51b,51c,51d,51eのうち搬送路30上における搬送ロボットTRの位置に最も近いのが排気口51bであり、2番目に近いのが排気口51cである。メインコントローラ92は、ロボットコントローラ91から伝達された搬送ロボットTRの搬送路30上における位置情報に基づいて、搬送ロボットTRの位置に最も近い排気口および2番目に近い排気口を特定する。図4の例では、搬送路30上における搬送ロボットTRの位置に2番目に近い単独の排気口51cが存在している。なお、上述した図3の例では搬送ロボットTRの位置に2番目に近い単独の排気口は存在しない(搬送ロボットTRの位置に2番目に近い2個の排気口51a,51cが存在している)。
Next, FIG. 4 is a diagram schematically illustrating an exhaust operation when the transport robot TR is positioned closer to the
搬送ロボットTRが隣り合う排気口51bと排気口51cとの中間よりも排気口51b寄りに位置しているときには、メインコントローラ92は、搬送ロボットTRに最も近い排気口51bにおける排気流量が基準排気流量よりも大きくなるように、排気ファン52bの回転数を制御する。また、メインコントローラ92は、搬送ロボットTRに2番目に近い排気口51cにおける排気流量も基準排気流量よりも大きくなるように、排気ファン52cの回転数を制御する。但し、搬送ロボットTRに最も近い排気口51bにおける排気流量の方が2番目に近い排気口51cにおける排気流量よりも大きくなるように、メインコントローラ92は排気ファン52bおよび排気ファン52cの回転数を制御する。なお、排気口51b,51cを除く他の3個の排気口51a,51d,51eにおける排気流量は上記と同様の基準排気流量とされている。
When the transfer robot TR is located closer to the
搬送ロボットTRに最も近い排気口51bおよび2番目に近い排気口51cにおける排気流量を他の3個の排気口51a,51d,51eにおける排気流量よりも大きくすることにより、搬送ロボットTR周辺の雰囲気を強く排気口51bおよび排気口51cから排気することができ、搬送ロボットTR周辺でのパーティクルの巻き上がりを防止することができる。特に、搬送ロボットTRに最も近い排気口51bにおける排気流量を2番目に近い排気口51cにおける排気流量よりも大きくすることにより、搬送ロボットTR周辺でのパーティクルの巻き上がりをより効果的に防止することができる。
By setting the exhaust flow rate at the
さらに、図5は、搬送ロボットTRが隣り合う排気口51bと排気口51cとの中間に位置しているときの排気動作を模式的に示す図である。同図は、搬送ロボットTRが排気口51bの直上から隣の排気口51cに向けて移動している過程で生じる状態である。図5においては、5個の排気口51a,51b,51c,51d,51eのうち搬送路30上における搬送ロボットTRの位置に最も近いのが2個の排気口51b,51cであり、搬送ロボットTRから排気口51bまでの距離と排気口51cまでの距離とは等しい。メインコントローラ92は、ロボットコントローラ91から伝達された搬送ロボットTRの搬送路30上における位置情報に基づいて、搬送ロボットTRの位置に最も近い2個の排気口を特定する。図5の例では、搬送路30上における搬送ロボットTRの位置に最も近い排気口が2個存在しており、その一方で搬送ロボットTRの位置に2番目に近い単独の排気口は存在しない。
Furthermore, FIG. 5 is a diagram schematically illustrating an exhaust operation when the transport robot TR is positioned between the
搬送ロボットTRが隣り合う排気口51bと排気口51cとの中間に位置しているときには、メインコントローラ92は、搬送ロボットTRに最も近い2個の排気口51b,51cにおける排気流量が基準排気流量よりも大きくなるように、排気ファン52b,52cの回転数を制御する。搬送ロボットTRが排気口51bと排気口51cとの中間に位置しているときには、排気口51bにおける排気流量と排気口51cにおける排気流量とは等しい。すなわち、メインコントローラ92の制御により、排気ファン52bの回転数と排気ファン52cの回転数とは同じとされている。なお、排気口51b,51cを除く他の3個の排気口51a,51d,51eにおける排気流量は上記と同様の基準排気流量とされている。
When the transfer robot TR is positioned between the
搬送ロボットTRに最も近い2個の排気口51b,51cにおける排気流量を他の3個の排気口51a,51d,51eにおける排気流量よりも大きくすることにより、搬送ロボットTR周辺の雰囲気を強く排気口51bおよび排気口51cから排気することができ、搬送ロボットTR周辺でのパーティクルの巻き上がりを防止することができる。以上の図3から図5の説明は、搬送ロボットTRが排気口51bの直上から排気口51bと排気口51cとの中間までに位置している場合についてであったが、搬送ロボットTRが他の排気口51の近傍に位置している場合についても同様である。
By making the exhaust flow rate at the two
集約すると、本実施形態においては、複数の排気口51a,51b,51c,51d,51eのうち搬送路30上における搬送ロボットTRの位置に最も近い排気口における排気流量が他の排気口における排気流量である基準排気流量よりも大きくなるようにしている。さらに、搬送路30上における搬送ロボットTRの位置に2番目に近い単独の排気口が存在する場合には、その2番目に近い排気口における排気流量も基準排気流量よりも大きくなるようにしている。但し、搬送ロボットTRの位置に最も近い排気口における排気流量は2番目に近い排気口における排気流量よりも大きい。
In summary, in this embodiment, the exhaust flow rate at the exhaust port closest to the position of the transfer robot TR on the
このようにすれば、搬送路30上に排気の障害となる搬送ロボットTRが存在していても、搬送ロボットTR周辺の雰囲気を強く排気することができ、搬送ロボットTR周辺でのパーティクルの巻き上がりを防止することができる。その結果、搬送ロボットTRによって搬送される基板Wへのパーティクルの付着を防ぐことができる。
In this way, even if there is a transport robot TR that becomes an obstacle to exhaustion on the
また、複数の排気口51a,51b,51c,51d,51eにおける排気流量をメインコントローラ92によって個別に調整するため、例えば搬送ロボットTRの交換時等に各排気口の排気流量を均一に調整する作業が不要となり、基板処理装置1のダウンタイムを削減することができる。
Further, in order to individually adjust the exhaust flow rate at the plurality of
以上、本発明の実施の形態について説明したが、この発明はその趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行うことが可能である。例えば、上記実施形態においては、搬送路30の下方に5個の排気口51a,51b,51c,51d,51eが形設されていたが、排気口51の個数は5個に限定されるものではなく、複数であれば良い。
While the embodiments of the present invention have been described above, the present invention can be modified in various ways other than those described above without departing from the spirit of the present invention. For example, in the above-described embodiment, the five
また、上記実施形態においては、5個の排気口51a,51b,51c,51d,51eに1対1で対応して5個の排気ファン52a,52b,52c,52d,52eを設けていたが、これに限定されるものではなく、例えば1つの排気ポンプから各排気口に排気管を分岐させ、それぞれの分岐配管に流量調整弁を設けて各排気口の排気流量を個別に制御するようにしても良い。
In the above-described embodiment, the five
また、排気口51における排気流量の制御に加えて、搬送路30の上方に設けられたファンフィルタユニットからのエア送出量を制御するようにしても良い。すなわち、搬送路30上における搬送ロボットTRの位置に最も近い位置におけるエア送出量を他の位置よりも大きくすれば、搬送ロボットTR周辺でのパーティクルの巻き上がりをより効果的に防止することができる。
Further, in addition to the control of the exhaust flow rate at the exhaust port 51, the air delivery amount from the fan filter unit provided above the
また、基板処理装置1の構成は図1,2に示したような形態に限定されるものではなく、複数の基板処理部に沿って搬送路が延設され、その搬送路上に搬送ロボットTRが設けられて各基板処理部に基板Wを搬送する形態であれば良い。さらに、複数の基板処理部として上記実施形態に示したもの以外にも種々の処理部(例えば、洗浄処理部、エッジ露光処理部等)を組み込むことが可能である。
The configuration of the
1 基板処理装置
10 インデクサブロック
11 載置台
12 インデクサロボット
20 処理ブロック
21,22,23 熱処理部
24 スピンナー
30 搬送路
34 ガイドレール
35 ボールネジ
36 駆動モータ
51a,51b,51c,51d,51e 排気口
52a,52b,52c,52d,52e 排気ファン
91 ロボットコントローラ
92 メインコントローラ
TR 搬送ロボット
W 基板
DESCRIPTION OF
Claims (3)
前記複数の基板処理部に沿って延設された搬送路上に設置され、前記複数の基板処理部に対して基板を搬送する搬送ロボットと、
前記搬送路に沿って前記搬送ロボットを移動させる駆動機構と、
前記搬送路の下方に形設された複数の排気口に1対1で対応して設けられ、前記搬送路上の雰囲気を前記複数の排気口を介して排出する複数の排気部と、
前記複数の排気部の排気流量を個別に制御する排気制御部と、
を備え、
前記排気制御部は、前記複数の排気口のうち前記搬送路上における前記搬送ロボットの位置に最も近い排気口における排気流量が他の排気口についての排気流量である基準排気流量よりも大きな第1排気流量となるように前記複数の排気部を制御することを特徴とする基板処理装置。 A substrate processing apparatus for transferring a substrate to a plurality of substrate processing units and processing the substrate,
A transfer robot installed on a transfer path extending along the plurality of substrate processing units, and transferring a substrate to the plurality of substrate processing units;
A drive mechanism for moving the transfer robot along the transfer path;
A plurality of exhaust portions provided in a one-to-one correspondence with a plurality of exhaust ports formed below the transport path, and exhausting the atmosphere on the transport path through the plurality of exhaust ports;
An exhaust control unit for individually controlling the exhaust flow rates of the plurality of exhaust units;
With
The exhaust control unit includes a first exhaust gas whose exhaust flow rate at an exhaust port closest to the position of the transfer robot on the transfer path is larger than a reference exhaust flow rate that is an exhaust flow rate for the other exhaust ports among the plurality of exhaust ports. A substrate processing apparatus that controls the plurality of exhaust units so as to have a flow rate.
前記排気制御部は、前記複数の排気口のうち前記搬送路上における前記搬送ロボットの位置に2番目に近い排気口における排気流量が前記基準排気流量よりも大きな第2排気流量となるように前記複数の排気部を制御することを特徴とする基板処理装置。 The substrate processing apparatus according to claim 1,
The exhaust control unit includes the plurality of exhaust ports so that an exhaust flow rate at an exhaust port second closest to the position of the transfer robot on the transfer path is a second exhaust flow rate larger than the reference exhaust flow rate. A substrate processing apparatus for controlling an exhaust part of the substrate.
前記第1排気流量は前記第2排気流量よりも大きいことを特徴とする基板処理装置。 The substrate processing apparatus according to claim 2,
The substrate processing apparatus, wherein the first exhaust flow rate is larger than the second exhaust flow rate.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016254689A JP2018107366A (en) | 2016-12-28 | 2016-12-28 | Substrate processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016254689A JP2018107366A (en) | 2016-12-28 | 2016-12-28 | Substrate processing apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018107366A true JP2018107366A (en) | 2018-07-05 |
Family
ID=62787395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016254689A Pending JP2018107366A (en) | 2016-12-28 | 2016-12-28 | Substrate processing apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018107366A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022016097A (en) * | 2020-07-10 | 2022-01-21 | 株式会社日立ハイテク | Substrate transport device |
| JP7531569B2 (en) | 2021-12-20 | 2024-08-09 | サムス カンパニー リミテッド | Substrate transfer module and semiconductor manufacturing equipment including same |
-
2016
- 2016-12-28 JP JP2016254689A patent/JP2018107366A/en active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022016097A (en) * | 2020-07-10 | 2022-01-21 | 株式会社日立ハイテク | Substrate transport device |
| JP7464471B2 (en) | 2020-07-10 | 2024-04-09 | 株式会社日立ハイテク | Substrate Transport Device |
| JP7531569B2 (en) | 2021-12-20 | 2024-08-09 | サムス カンパニー リミテッド | Substrate transfer module and semiconductor manufacturing equipment including same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4376072B2 (en) | Substrate processing apparatus and substrate processing method | |
| US7641404B2 (en) | Substrate processing apparatus | |
| US7722267B2 (en) | Substrate processing apparatus | |
| JP3943828B2 (en) | Coating, developing device and pattern forming method | |
| US10201824B2 (en) | Substrate processing apparatus and substrate processing method | |
| TW201314820A (en) | Substrate processing apparatus and substrate processing method | |
| JP2009021275A (en) | Substrate treating equipment | |
| JP4298238B2 (en) | Substrate processing apparatus and substrate processing system | |
| US7690853B2 (en) | Substrate processing apparatus | |
| JP2005101076A (en) | Substrate processing equipment and substrate processing method | |
| JP4280159B2 (en) | Substrate processing equipment | |
| JP2018107366A (en) | Substrate processing apparatus | |
| JP6030393B2 (en) | Substrate processing equipment | |
| JP3771430B2 (en) | Substrate processing apparatus and substrate processing system | |
| KR100573618B1 (en) | Substrate processing method and substrate processing apparsus | |
| JP6553388B2 (en) | Substrate transfer apparatus, substrate processing apparatus, and substrate transfer method | |
| JP5216713B2 (en) | Coating processing apparatus, coating processing method, program, and computer storage medium | |
| US9828675B2 (en) | Processing apparatus and processing method | |
| TWI651797B (en) | Conveyance condition setting apparatus, substrate processing apparatus, and method for setting conveyance condition | |
| KR102264295B1 (en) | Apparatus and Method for treating substrate | |
| JP3878441B2 (en) | Substrate processing equipment | |
| JP5059685B2 (en) | Substrate processing apparatus and substrate processing method | |
| KR102510897B1 (en) | Substrate transport device and substrate transport method | |
| KR102041319B1 (en) | Unit for controling exhaust, apparatus and method for treating substrate using the same | |
| JP5442969B2 (en) | Substrate processing unit, substrate processing apparatus, and nozzle position control method |