JP2017516435A - 電動搬送ローラ用電源制御回路 - Google Patents
電動搬送ローラ用電源制御回路 Download PDFInfo
- Publication number
- JP2017516435A JP2017516435A JP2016546944A JP2016546944A JP2017516435A JP 2017516435 A JP2017516435 A JP 2017516435A JP 2016546944 A JP2016546944 A JP 2016546944A JP 2016546944 A JP2016546944 A JP 2016546944A JP 2017516435 A JP2017516435 A JP 2017516435A
- Authority
- JP
- Japan
- Prior art keywords
- potential
- motor
- position sensor
- terminal
- power supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 abstract 1
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000007547 defect Effects 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/06—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G23/00—Driving gear for endless conveyors; Belt- or chain-tensioning arrangements
- B65G23/02—Belt- or chain-engaging elements
- B65G23/04—Drums, rollers, or wheels
- B65G23/08—Drums, rollers, or wheels with self-contained driving mechanisms, e.g. motors and associated gearing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/40—Working vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/60—Electric or hybrid propulsion means for production processes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Rollers For Roller Conveyors For Transfer (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Conveyors (AREA)
- Rectifiers (AREA)
- Brushless Motors (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
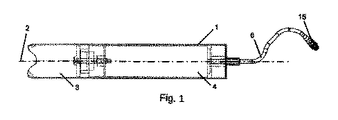
本発明は貨物コンベヤの構成部品として産業用に企図されている。関連する整流電子回路はローラ本体の外側に配置されている。本発明は、4端子コネクタを使用して、組み立てを容易にするために、軸要素を通す配線を4本だけにしたものである。ローラ(1)は中空体(3)からなり、その中にモーター(4)が配置され、駆動及びトルク伝達装置(5)によって中空体に連結されている。モーター(4)のコイル(8)からの端子(7)と第1の電位端子(9)を有するケーブル(6)は、位置センサ(10)に電力を供給する。センサへの電力は第1の電位(9)及び第2の電位(12)によって印加される。センサ信号端子(11)は、第1の電位(9)及び第2の電位(12)によって電力供給されるデジタルエンコーダ素子(17)に接続されている。このエンコーダ素子は、第1の電位端子(9)に接続された1つの共通の符号化出力(19)を有する。
Description
本発明は、産業界において広範な用途のある、より具体的には様々な貨物及び/又は製品の搬送用に設計されたコンベヤの主要構成部品としての用途がある、電動搬送ローラ用電源制御回路に関する。
EP1671901により、モーターによって駆動されるコンベヤローラの電力供給及び制御用の回路が存在することが知られており、この回路は、内部にモーターが配置される中空体を含み、この中空体は軸を中心として回転する。モーターは、前記ローラ本体を駆動し、トルクを伝達するために使用される構成部品によって、かつモーターに電力供給する電源ケーブルによって、並びに少なくとも2つの、望ましくは3つの位置センサによって、ローラ本体に連結される。また、電子整流装置も提供され、この電子装置は、ローラ又はモーターに組み込まれていることもあれば、外部装置であることもある。位置センサは、モーターのロータの位置に対するステーターの位置に関連する信号を生成するように設計されている。使用されるモーターは、内部ロータを有するブラシレス三相型である。中空軸構成部品が代表的である、モーターの軸受要素は通常、ケーブル及びコネクタと一体化されている。コネクタは、モーターを制御装置と接続するように設計されている。コネクタには、コイルへの3つの接続端子、位置センサに電力を供給するための2つの端子、並びに位置センサ毎に1つの出力信号端子が組み込まれている。したがって、コネクタに使用される端子の数は8つに達し、これは非常に非実用的であり、モーターによって駆動される既知の搬送ローラに多数の欠陥をもたらしている。これらの欠陥は、組み立ての困難さと組み立てスペースの欠如に関連している。そのため、外部整流装置を使用した場合においては、主要な欠陥は、電源配線が太くなること、及び、上述したように端子が多くなることによる、モーターの電力出力の選択における制限と、コンベヤの支持要素に対するモーターの軸受要素の中空軸構成部品の組み立てのために、最大限許容し得る組み立て開口部(assembly orifice)に関するものとなる。内部整流装置を選択した場合、大きな作動負荷により、内部にあるモーターからローラ本体へ相当量の熱が伝達されることになり、この熱は、ローラが封入されているために十分に放出することができない。これによって、許容作動負荷が大きく制限される。
本発明の課題は、ローラ及び軸受及び接続要素の寸法は変えずに、高出力モーターを使用できる、モーターによって駆動される搬送ローラの電源制御回路を創出することである。
この課題は、搬送ローラに、軸を中心として回転する、ローラの中空体が組み込まれる、電動搬送ローラ用電源制御回路によって解決される。中空体内には、モーターが組み込まれ、モーターは、ローラ本体を駆動し、かつトルクを伝達する要素によって、ローラの中空体の内側に連結されている。また、中空体内では、ケーブルに、モーターのコイルからのコネクタに接続されている各端子、及び信号出力を有する位置センサに電力供給する第1の電位のための1つの端子が組み込まれている。本発明によれば、信号出力を有する位置センサの数は少なくとも1つであってよい。位置センサには、第1の電位端子及び第2の電位から電力供給される。この第2の電位は、追加回路によって生成され、この追加回路は、第2の電位をもたらすためにモーターのコイルのうちの少なくとも1つと接続される。
第1の電位及び第2の電位によって電力が供給される、デジタルエンコーダ素子に接続される位置センサの出力信号が提供され、このデジタルエンコーダ素子は、センサに電力供給するために使用される第1の電位に接続される、1つの共通の符号化信号出力を有する。第1の電位の電気的特性は、符号化信号によって変化する。
第2の電位を生成するために使用される回路は、少なくとも1つの整流素子を含む。
デジタルエンコーダ素子においては、符号化信号が、位置センサからの情報、並びにモーターの特性に関する追加情報を生成する。
実施形態の1つでは、ケーブルに組み込まれた、端子を有する位置センサの信号出力を提供する。
本発明の利点は、位置センサ用電源並びにデジタルエンコーダ素子の特定の接続様式によって、モーターの制御及び整流に必要とされる電子回路を、より端子の数を減らしたコネクタを使用してローラ本体の外側に配置することが可能になり、それによって電子回路をモーターの温度の影響から除外することができることである。これにより、作動負荷をより大きくすること、及び電子回路の冷却の容易化の両方が可能になる。本発明によれば、搬送ローラの中空軸構成部品に通す配線を4本だけ(即ち、モーターの3つの相と、位置センサに対する1つの電源端子)にすることができ、これにより、広範に使用されている4端子コネクタの適用が確保され、組み立てが容易になる。
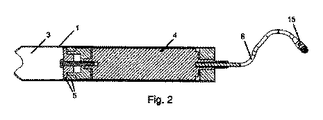
電動搬送ローラ用電源制御回路であって、当該回路は、軸2を中心として回転するローラ1の中空体3を含み、中空体3内には、モーター4が図1及び図2に図示されるように配置されている。モーター4は、ローラ本体を駆動し、かつトルクを伝達する要素5によって、ローラ1の中空体3の内側に連結されている。図3〜図8に図示されるように、コネクタ15付きのケーブル6が提供され、コネクタ15には、モーター4のコイル8の各端子7が、位置センサ10に電力供給するために使用される第1の電位9のための1つの端子と共に接続されている。提供される位置センサ10は信号出力11を有する。本発明によれば、信号出力11を有する位置センサ10の数は少なくとも1つであってよい。位置センサ10には第1の電位端子9及び第2の電位端子22から電力が供給され、ここで、前記第2の電位は、追加回路12によって生成され、この追加回路12は、第2の電位を提供するために使用され、モーター4のコイル8のうちの少なくとも1つに接続される。モーター4は、2つ以上のコイルを有する、既知のブラシレス型から選択することができる。
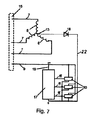
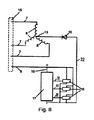
第2の電位22は、図3〜図6に図示されるように、モーター4のコイル8の端子7によって生成され得るか、又は図7及び図8に示されるように、これらのコイル8の共通点13から生成され得る。
図4に図示する実施形態では、ケーブル6には、モーター4のコイル8の端子7、第1の電位9の端子、及び位置センサ10の信号出力11からの端子14が組み込まれている。図3及び図4に図示するように、前記端子7、9及び14はすべて、それぞれ、コネクタ15に接続され、その結果として外部整流装置16に接続されている。
本発明によれば、第2の電位22は、第1の電位9と一緒に、位置センサ10に電力を供給するために使用される。位置センサ10は、例えば、ホール効果センサ、ソリッド磁気抵抗器、並びに光センサ、容量センサ、レーザセンサ、又はこの目的に好適なその他のセンサといった様々なタイプのものであってよい。
本発明の好ましい実施形態によれば、位置センサ10の信号出力11は、第1の電位(9)及び第2の電位(22)によって電力供給されるデジタルエンコーダ素子17に接続されており、ここで、第2の電位22は、上記のとおり、第2の電位22を提供するために、モーター4のコイル8のうちの少なくとも1つに接続されている追加回路(12)によって生成される。これは、図3と図5〜図8に図示されている。デジタルエンコーダ素子17は、センサ10に電力供給するために使用される第1の電位端子9の端子に接続された、1つの共通の符号化信号出力19を有しており、第1の電位(9)の電気的特性は符号化信号によって変化する。
デジタルエンコーダ素子17においては、振幅エンコーディング、周波数エンコーディング、位相エンコーディング、同期エンコーディング又は非同期エンコーディングといった様々な方法を、符号化及び信号を第1の電位に重畳するために使用することができる。
外部整流装置16への接続を確立するために、コネクタ15に接続しなければならない端子の数は、位置センサ10からの信号出力11をデジタルエンコーダ素子17に接続することにより、大幅に減らされる。それ故、位置センサ10が3つ使用されている場合でも、コネクタ15に接続するために提供される端子の総数は、モーター4のコイル8からの3つの端子7を含めて4つである。
図3〜図8に図示されているように、第2の電位22を提供する回路12は、少なくとも1つの整流素子18を含むことが好適である。整流素子18は、当業者に知られ、かつ用いられている、ダイオード、トランジスタ又はその他の構成部品であり得る。本発明によれば、符号化信号は、位置センサに関する情報、並びにモーターの特性に関する追加情報を生成する。
第2の電位22を生成するための選択肢については、図3、図5、図6、図7及び図8に更に詳細に示されている。即ち、例えば、位置センサ10に電力を供給するための第2の負電位22の生成は、図3及び図6に図示されている。この負電位は、外部整流装置16により、モーター4のコイル8のうちの少なくとも1つの「マイナス」端子に接続可能となる条件下であればいつでも形成される。ここで、コネクタ15を経由して供給される第1の電位9は正である。この例では、3つの整流素子18が、モーター4のコイル8のそれぞれに接続されている。
位置センサ10に電力を供給するための第2の正電位22の生成は、図5に図示された別の実施形態で示されている。この正電位は、外部整流装置16により、モーター4のコイル8のうちの少なくとも1つの「プラス」端子に接続可能となる条件下であればいつでも形成される。ここで、コネクタ15を経由して供給される第1の電位9は負である。この例では、3つの整流素子18が、モーター4のコイル8のそれぞれに接続されている。
図7に示されるように、モーターのコイル8の共通点に接続した単一の整流素子18を使用することによって、位置センサ10に電力を供給するための第2の負電位22を生成することが可能である。この負電位は、外部整流装置16が、モーター4のコイル8のうちの少なくとも2つの連続的な転流(continuous commutation)を提供する条件下で生成される。
ここで、コネクタ15を経由して供給される第1の電位9は正である。
モーターのコイル8の共通点に接続した単一の整流素子18を使用することによって、位置センサ10に電力を供給するための第2の正電位22を生成は、図8に示される。この第2の正電位22は、外部整流装置16が、モーター4のコイル8のうちの少なくとも2つの連続的な転流を提供する条件下で生成される。ここで、コネクタ15を経由して供給される第1の電位9は負である。
本発明は以下のように動作する。
外部整流装置16は、通電された後、対応する極性の電圧(図3によれば正)を、コネクタ15に接続されている第1の電位端子9に印加する。第2の電位22の形成に必要な極性の電圧(図3によれば負)が、整流装置16を経由してモーター4のコイル8のうちの少なくとも1つに印加される。このようにして生成される第1の電位9及び第2の電位22は、位置センサ10及びデジタルエンコーダ素子17に電力を供給する。デジタルエンコーダ素子17は、動作を開始し、位置センサ10からの情報並びに追加情報を、デジタル信号を第1の電位9に重畳することによりエンコーダ素子17へ伝送する。
こうして、電源ユニット20と外部整流装置16に接続された復号装置21によって重畳信号が復号され、位置センサ10からの復号化された情報が、モーター4のコイル8に印加される電圧の整流のために使用されることによって、モーターの回転が開始される。デジタルエンコーダ素子17によって整流装置16に伝達される追加情報は、診断目的で使用される。
このような追加情報の例としては、モーター及び搬送ローラの本体内部の温度がある。
Claims (5)
- 電動搬送ローラ用電源制御回路であって、
前記搬送ローラには、軸を中心として回転する、前記ローラの中空体が組み込まれるものであり、前記中空体内には、モーターが組み込まれるものであり、前記モーターは、前記ローラの本体を駆動するための、かつトルクを伝達するための要素によって、前記ローラの前記中空体に連結されるものであり、
前記本体には、ケーブルに、前記モーターのコイルからのコネクタに接続されている各端子、及び信号出力を有するように備えられた位置センサに電力供給するための1つの第1の電位端子、がさらに組み込まれており、
信号出力(11)を有する位置センサ(10)の数は、少なくとも1つとすることができ、
前記位置センサ(10)は、前記第1の電位端子(9)、及び追加回路(12)によって生成される第2の電位(22)から電力供給され、
前記追加回路(12)は、前記第2の電位(22)をもたらすために前記モーター(4)の前記コイル(8)のうちの少なくとも1つと接続されることを特徴とする、
電動搬送ローラ用電源制御回路。 - 前記位置センサ(10)からの前記出力信号(11)は、
前記第1の電位(9)及び前記第2の電位(22)から電力供給される、デジタルエンコーダ素子(17)に接続され、
前記デジタルエンコーダ素子(17)は、前記位置センサ(10)に電力供給するために使用される前記第1の電位(9)に接続される、1つの共通の符号化信号出力(19)を有するととともに、
前記第1の電位(9)の電気的特性は、前記符号化信号によって変化する、
ことを特徴とする、請求項1に記載の電動搬送ローラ用電源制御回路。 - 前記第2の電位(22)を生成するために使用される前記回路(12)は、少なくとも1つの整流素子(18)を含むことを特徴とする、
請求項1又は2に記載の電動搬送ローラ用電源制御回路。 - 前記デジタルエンコーダ素子(17)において、前記符号化信号は、前記位置センサ(10)に関する情報、並びに前記モーター(4)の特性に関連する追加情報を生成する、
ことを特徴とする、請求項2又は3に記載の電動搬送ローラ用電源制御回路。 - 前記位置センサ(10)の前記信号出力(11)は、ケーブル(6)に組み込まれた端子(14)に印加される、
ことを特徴とする、請求項1に記載の電動搬送ローラ用電源制御回路。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BG111686A BG111686A (bg) | 2014-01-29 | 2014-01-29 | Схема за захранване и управление на задвижвана с електродвигател транспортна ролка |
| BG111686 | 2014-01-29 | ||
| PCT/BG2014/000005 WO2015113121A1 (en) | 2014-01-29 | 2014-02-06 | Power supply and control circuit for motor-driven conveying rollers |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017516435A true JP2017516435A (ja) | 2017-06-15 |
Family
ID=50342121
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016546944A Pending JP2017516435A (ja) | 2014-01-29 | 2014-02-06 | 電動搬送ローラ用電源制御回路 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9742253B2 (ja) |
| EP (1) | EP3100340B1 (ja) |
| JP (1) | JP2017516435A (ja) |
| CN (1) | CN106170910B (ja) |
| BG (1) | BG111686A (ja) |
| WO (1) | WO2015113121A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019531681A (ja) * | 2016-08-05 | 2019-10-31 | インターロール・ホールディング・アーゲー | 周波数コンバータ及びオプションのベルト張力センサを備えるドラムモータ |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3390248B1 (de) * | 2016-08-05 | 2022-09-28 | Interroll Holding AG | Motorbetriebene förderrolle mit bussteuerung |
| EP4050918A1 (en) | 2021-02-24 | 2022-08-31 | Industrial Software | Motor-driven conveyor-roller controller, system comprising such a controller and method for operating a motor roller |
| EP4080302B1 (en) | 2021-04-20 | 2023-09-06 | Kyowa Europe GmbH | Conveyor system, motor roller controller and method for operating a conveyor system |
| EP4116237A1 (en) | 2021-07-06 | 2023-01-11 | Kyowa Europe GmbH | Conveyor system; motor roller controller and method for operating a conveyor system |
| CN113659890B (zh) * | 2021-08-18 | 2024-07-30 | 歌尔股份有限公司 | 电机控制系统及传送线 |
| EP4195496A1 (en) | 2022-05-23 | 2023-06-14 | Kyowa Europe GmbH | Method for operating a motor-roller controller, motor-roller controller and conveyor system |
| EP4283419A1 (en) | 2022-05-23 | 2023-11-29 | Kyowa Europe GmbH | Conveyor system, motor-roller controller and method for operating a conveyor system |
| EP4456488A1 (en) | 2023-04-24 | 2024-10-30 | Kyowa Europe GmbH | Motor-roller control proxy |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003018874A (ja) * | 2000-10-12 | 2003-01-17 | Matsushita Electric Ind Co Ltd | モータ制御装置 |
| US20040051499A1 (en) * | 2000-10-12 | 2004-03-18 | Koji Kameda | Motor controller |
| DE102008047494A1 (de) * | 2008-09-17 | 2010-04-15 | Continental Teves Ag & Co. Ohg | Elektronisch kommutierter Gleichstrommotor |
| US20120048682A1 (en) * | 2010-08-31 | 2012-03-01 | Kazuo Itoh | Fault diagnosis method for roller conveyor, roller conveyor, and controller for conveyor |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2123651U (zh) * | 1991-08-14 | 1992-12-02 | 蔡青松 | 电动起子的离合器 |
| JPH0731723U (ja) * | 1993-11-30 | 1995-06-16 | 伊東電機株式会社 | コンベア装置およびモータ内蔵ローラの結線構造 |
| GB9524022D0 (en) | 1995-11-23 | 1996-01-24 | Barnes N M | Method of operating an electronic circuit |
| US6710505B1 (en) * | 1998-06-11 | 2004-03-23 | Aspen Motion Technologies, Inc. | Direct drive inside-out brushless roller motor |
| JP3673923B2 (ja) * | 2002-12-09 | 2005-07-20 | 伊東電機株式会社 | ローラ装置、並びに、ローラ装置の製造方法 |
| DE10336304B4 (de) * | 2003-07-31 | 2020-08-27 | Interroll Holding Ag | Motorbetriebene Förderrolle, Steuervorrichtung für eine motorbetriebene Förderrolle, Rollenförderanlage und Steuerverfahren für eine Rollenförderanlage |
| WO2011103975A2 (de) | 2010-02-23 | 2011-09-01 | Sew-Eurodrive Gmbh & Co. Kg | Rollenantrieb und verfahren zum steuern einer anlage |
-
2014
- 2014-01-29 BG BG111686A patent/BG111686A/bg unknown
- 2014-02-06 EP EP14711439.1A patent/EP3100340B1/en active Active
- 2014-02-06 JP JP2016546944A patent/JP2017516435A/ja active Pending
- 2014-02-06 WO PCT/BG2014/000005 patent/WO2015113121A1/en active Application Filing
- 2014-02-06 US US15/115,233 patent/US9742253B2/en active Active
- 2014-02-06 CN CN201480073434.2A patent/CN106170910B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003018874A (ja) * | 2000-10-12 | 2003-01-17 | Matsushita Electric Ind Co Ltd | モータ制御装置 |
| US20040051499A1 (en) * | 2000-10-12 | 2004-03-18 | Koji Kameda | Motor controller |
| DE102008047494A1 (de) * | 2008-09-17 | 2010-04-15 | Continental Teves Ag & Co. Ohg | Elektronisch kommutierter Gleichstrommotor |
| US20120048682A1 (en) * | 2010-08-31 | 2012-03-01 | Kazuo Itoh | Fault diagnosis method for roller conveyor, roller conveyor, and controller for conveyor |
| JP2012071988A (ja) * | 2010-08-31 | 2012-04-12 | Ito Denki Kk | ローラコンベア装置の故障診断方法、ローラコンベア装置、並びにコンベア装置用コントローラ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019531681A (ja) * | 2016-08-05 | 2019-10-31 | インターロール・ホールディング・アーゲー | 周波数コンバータ及びオプションのベルト張力センサを備えるドラムモータ |
| US11018558B2 (en) | 2016-08-05 | 2021-05-25 | Interroll Holding Ag | Drum motor with frequency converter and optional belt tension sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3100340B1 (en) | 2018-04-18 |
| CN106170910A (zh) | 2016-11-30 |
| US20160352205A1 (en) | 2016-12-01 |
| BG111686A (bg) | 2015-07-31 |
| WO2015113121A8 (en) | 2016-07-28 |
| EP3100340A1 (en) | 2016-12-07 |
| WO2015113121A1 (en) | 2015-08-06 |
| CN106170910B (zh) | 2018-11-02 |
| US9742253B2 (en) | 2017-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017516435A (ja) | 電動搬送ローラ用電源制御回路 | |
| US10784757B2 (en) | Synchronous machine with common motor/generator exciter stage | |
| JP5619279B2 (ja) | 電動パワーステアリング装置 | |
| CN105634225B (zh) | 直流无刷电机及使用其的电动助力转向系统 | |
| CN105993113B (zh) | 电动机、电动动力转向装置和车辆 | |
| US8305025B2 (en) | Methods and apparatus for controlling multiple A.C. induction machines from a single inverter | |
| US10069366B2 (en) | Terminal assembly for an electric machine | |
| CN105981292B (zh) | 电动机控制装置、电动动力转向装置和车辆 | |
| US9789899B2 (en) | Drive device and electric power steering apparatus | |
| US20190089223A1 (en) | Vernier External Rotor Machine and Motor System | |
| US9778071B2 (en) | Excitation signal generator for resolver | |
| CN105743287A (zh) | 马达单元 | |
| WO2014180960A3 (de) | Antriebssystem | |
| KR20160113602A (ko) | 모터-구동식 이송 롤러를 위한 전원 공급 및 제어 회로 | |
| US9876456B2 (en) | Brushless electrical machine | |
| JP5326732B2 (ja) | 交流電動機の機械角推定方法及び機械角推定装置 | |
| US20120181882A1 (en) | Electric machine having an integrated rotor temperature sensor | |
| US20190028051A1 (en) | Vacuum Pump Drive Having Two Frequency Converters | |
| DE102005023927A1 (de) | Elektroantrieb für Kraftfahrzeuge | |
| KR102293611B1 (ko) | 리졸버 | |
| US20240333097A1 (en) | Electric motor with an energy-harvesting device | |
| JPH1070865A (ja) | 無軸受回転機械装置 | |
| TW202324905A (zh) | 馬達控制系統及馬達控制方法 | |
| JP6221389B2 (ja) | モータ | |
| US9419547B2 (en) | Switch type DC electric machine having auxiliary excitation winding and conduction ring and brush |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171206 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171220 |