JP2017506969A - 経食道心エコー超音波トランスデューサプローブのための触覚フィードバックのシステム及び方法 - Google Patents
経食道心エコー超音波トランスデューサプローブのための触覚フィードバックのシステム及び方法 Download PDFInfo
- Publication number
- JP2017506969A JP2017506969A JP2016555318A JP2016555318A JP2017506969A JP 2017506969 A JP2017506969 A JP 2017506969A JP 2016555318 A JP2016555318 A JP 2016555318A JP 2016555318 A JP2016555318 A JP 2016555318A JP 2017506969 A JP2017506969 A JP 2017506969A
- Authority
- JP
- Japan
- Prior art keywords
- contact force
- transducer probe
- tee
- force
- distal tip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0883—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4272—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue
- A61B8/429—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue characterised by determining or monitoring the contact between the transducer and the tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
- G01L1/225—Measuring circuits therefor
- G01L1/2262—Measuring circuits therefor involving simple electrical bridges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
- G01L5/0038—Force sensors associated with force applying means applying a pushing force
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/161—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance
- G01L5/1627—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance of strain gauges
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/58—Testing, adjusting or calibrating the diagnostic device
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Cardiology (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Gynecology & Obstetrics (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Description
Claims (20)
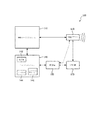
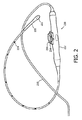
- その遠位端に遠位先端を有する経食道心エコー(TEE)超音波トランスデューサプローブと、
前記TEE超音波トランスデューサプローブに接続され、前記TEE超音波トランスデューサプローブからの1又は複数の信号に応じて音響画像を生成する音響イメージングシステムと、
患者に対し前記TEE超音波トランスデューサプローブの前記遠位先端を操作する制御装置と、
前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間の接触力を検知する接触力検知装置と、
前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間の接触力が閾値力を越える場合に、触覚、オーディオ及び視覚フィードバックのうち少なくとも1つを提供するフィードバック機構と、
を有するシステム。 - 前記制御装置が、少なくとも1つの制御機構を有し、前記フィードバック機構が、前記制御機構を通じて触覚フィードバックを提供する、請求項1に記載のシステム。
- 前記触覚フィードバックは、前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間の接触力が閾値力を越える場合に少なくとも1方向において前記制御機構の更なる移動に対する抵抗を増大させることを含む、請求項1に記載のシステム。
- 前記触覚フィードバックは、前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間で接触力が閾値力を越える場合に、前記制御機構を通じて少なくとも1方向における前記TEE超音波トランスデューサプローブの阻止される関節運動を含む、請求項1に記載のシステム。
- 前記フィードバック機構が、前記接触力が閾値力を越えることを示す少なくとも1つの光生成素子による視覚標示と、前記接触力が閾値力を越えることを示す可聴音と、の少なくとも一方を提供するユーザインタフェースを有する、請求項1に記載のシステム。
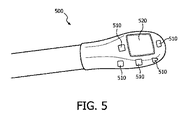
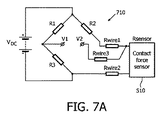
- 前記接触力検知装置が、前記TEE超音波トランスデューサプローブの遠位端に配された複数の力感受性抵抗器を有し、前記力感受性抵抗器の少なくとも1つの抵抗が、前記接触力の関数である、請求項1に記載のシステム。
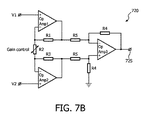
- 前記力感受性抵抗器の少なくとも1つに接続され、前記接触力の関数である出力信号を生成する処理装置を更に有する、請求項4に記載のシステム。
- 前記処理装置が、
前記力感受性抵抗器の少なくとも1つに接続されるホイートストンブリッジと、
前記ホイートストンブリッジの出力に接続され、前記出力信号を生成する増幅器と、
を有する、請求項7に記載のシステム。 - 前記制御装置が、
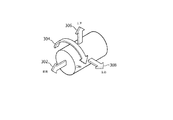
少なくとも1つの制御機構と、
前記制御機構が前記遠位先端を操作することができるように、前記制御機構と前記遠位先端との間に接続される少なくとも1つの関節運動ケーブルと、
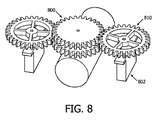
を有し、前記接触力検知装置が、前記関節運動ケーブルと前記制御機構との間のトルクを検知し、検知されるトルクに応じて前記接触力の関数である出力信号を生成するトルクセンサを有する、請求項1に記載のシステム。 - 前記制御機構がギア装置を有し、前記トルクセンサが、前記ギア装置に少なくとも1つのトルク測定ギアを有する、請求項9に記載のシステム。
- 前記システムは、前記接触力が閾値力を越えない場合に前記接触力と閾値力との間の関係を示すユーザインタフェースを有する、請求項1に記載のシステム。
- 患者に対し経食道心エコー(TEE)超音波トランスデューサプローブの遠位端における遠位先端を操作するステップと、
前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間の接触力を検知するステップと、
前記接触力が閾値を越える場合にフィードバック信号を供給するステップと、
を有する方法。 - 前記フィードバック信号は、前記TEE超音波トランスデューサプローブの前記遠位先端を操作するために使用される制御機構により、少なくとも1方向における更なる移動に対し増大される抵抗をもたらす、請求項12に記載の方法。
- 前記フィードバック信号は、前記接触力が閾値を越える場合に可聴アラート及び視覚アラートの一方をトリガする、請求項12に記載の方法。
- 前記フィードバック信号は更に、前記接触力が閾値力を越えない場合に前記接触力と前記閾値力との間の関係を示す、請求項12に記載の方法。
- 前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間の接触力を検知する前記ステップが、前記TEE超音波トランスデューサプローブの遠位端に配された複数の力感受性抵抗器を通じて前記接触力を検知することを含む、請求項12に記載の方法。
- 処理装置が、前記力感受性抵抗器の少なくとも1つに接続され、前記力感受性抵抗器の抵抗の関数である出力信号を生成し、前記出力信号は、前記接触力の関数である、請求項16に記載の方法。
- 前記TEE超音波トランスデューサプローブの前記遠位先端と患者との間の接触力を検知する前記ステップが、ギア装置が前記遠位先端を操作することができるように該ギア装置と前記遠位先端との間に接続される少なくとも1つの関節運動ケーブルと、該ギア装置との間のトルクを検知することを含む、請求項12に記載の方法。
- 前記トルクは、前記ギア装置における少なくとも1つのトルク測定ギアによって検知される、請求項18に記載の方法。
- 前記接触力が閾値を更に越えることになる前記TEE超音波トランスデューサプローブの前記遠位先端の更なる関節運動を阻止するステップを更に有する、請求項12に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461951717P | 2014-03-12 | 2014-03-12 | |
| US61/951,717 | 2014-03-12 | ||
| PCT/IB2015/051507 WO2015136402A1 (en) | 2014-03-12 | 2015-03-02 | System and method of haptic feedback for transesophageal echocardiogram ultrasound transducer probe |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017506969A true JP2017506969A (ja) | 2017-03-16 |
| JP2017506969A5 JP2017506969A5 (ja) | 2018-04-12 |
Family
ID=52630448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016555318A Pending JP2017506969A (ja) | 2014-03-12 | 2015-03-02 | 経食道心エコー超音波トランスデューサプローブのための触覚フィードバックのシステム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20170007202A1 (ja) |
| EP (1) | EP3116406A1 (ja) |
| JP (1) | JP2017506969A (ja) |
| CN (1) | CN106102592B (ja) |
| RU (1) | RU2016139689A (ja) |
| WO (1) | WO2015136402A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019501728A (ja) * | 2016-01-15 | 2019-01-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 融合画像ガイダンスシステムの注釈を使用した臨床ビューに対する自動化されたプローブステアリング |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10674997B2 (en) * | 2015-08-10 | 2020-06-09 | Shaohua Hu | Ultrasonic tracking probe and the method |
| KR20180034117A (ko) * | 2016-09-27 | 2018-04-04 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 초음파 진단 장치의 작동 방법 |
| CN109288540A (zh) * | 2017-07-24 | 2019-02-01 | 云南师范大学 | 一种具有触觉反馈的远程超声诊断系统 |
| CN108992086A (zh) * | 2017-10-20 | 2018-12-14 | 深圳华大智造科技有限公司 | 超声检测装置、台车及超声系统 |
| US20210030394A1 (en) * | 2018-02-08 | 2021-02-04 | Koninklijke Philips N.V. | Devices, systems, and methods for transesophageal echocardiography |
| EP3669787A1 (en) * | 2018-12-19 | 2020-06-24 | Koninklijke Philips N.V. | Ultrasound transducer unit with friction guiding function |
| WO2021116051A1 (en) * | 2019-12-12 | 2021-06-17 | Koninklijke Philips N.V. | Hybrid robotic-image plane control of a tee probe |
| WO2021115905A1 (en) * | 2019-12-12 | 2021-06-17 | Koninklijke Philips N.V. | Intuitive control interface for a robotic tee probe using a hybrid imaging-elastography controller |
| US20230120013A1 (en) * | 2021-10-20 | 2023-04-20 | Canon Medical Systems Corporation | Ultrasonic diagnostic apparatus, information-processing method, and storage medium |
| EP4248877A1 (en) * | 2022-03-23 | 2023-09-27 | Koninklijke Philips N.V. | Transesophageal transducer to increase patient safety |
| WO2023209093A1 (de) * | 2022-04-27 | 2023-11-02 | Medtecton Gmbh | Ultraschall-stabsonde |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06142114A (ja) * | 1992-10-30 | 1994-05-24 | Olympus Optical Co Ltd | 体腔内処置装置 |
| JP2006102152A (ja) * | 2004-10-05 | 2006-04-20 | National Institute Of Advanced Industrial & Technology | 触覚センサ及び触覚センサ装置 |
| JP2008183097A (ja) * | 2007-01-29 | 2008-08-14 | Aloka Co Ltd | 経食道プローブ及びそれを備えた超音波診断装置 |
| JP2008220530A (ja) * | 2007-03-09 | 2008-09-25 | Aloka Co Ltd | 体腔内プローブ |
| JP2010187936A (ja) * | 2009-02-18 | 2010-09-02 | Fujifilm Corp | 内視鏡 |
| JP2012513813A (ja) * | 2008-12-29 | 2012-06-21 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | リモートコントロールを備えた超音波撮像システム及びその動作方法 |
| US20120172731A1 (en) * | 2009-09-15 | 2012-07-05 | St. Jude Medical Systems Ab | Rapid exchange guide unit |
| WO2012153703A1 (ja) * | 2011-05-09 | 2012-11-15 | 国立大学法人鳥取大学 | 圧力センサー、内視鏡スコープ、内視鏡裝置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU4419900A (en) * | 1999-05-20 | 2000-12-12 | Electrotextiles Company Limited | Detecting mechanical interactions |
| GB0407366D0 (en) * | 2004-03-31 | 2004-05-05 | Koninkl Philips Electronics Nv | Textile form touch sensor |
| JP4465535B2 (ja) * | 2004-06-09 | 2010-05-19 | 株式会社日立メディコ | 弾性画像表示方法及び超音波診断装置 |
| US7839780B2 (en) * | 2006-03-30 | 2010-11-23 | Telcordia Technologies, Inc. | Dynamic traffic rearrangement to enforce policy changes in MPLS networks |
| US8048063B2 (en) * | 2006-06-09 | 2011-11-01 | Endosense Sa | Catheter having tri-axial force sensor |
| JP2008229267A (ja) * | 2007-03-23 | 2008-10-02 | Aloka Co Ltd | 超音波診断装置及び体腔内プローブ |
| US8142363B1 (en) * | 2007-07-11 | 2012-03-27 | Pacesetter, Inc. | Cardiac rhythm management lead with omni-directional pressure sensing |
| US8535308B2 (en) * | 2007-10-08 | 2013-09-17 | Biosense Webster (Israel), Ltd. | High-sensitivity pressure-sensing probe |
| US8864757B2 (en) * | 2008-12-31 | 2014-10-21 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for measuring force and torque applied to a catheter electrode tip |
| US8753278B2 (en) * | 2010-09-30 | 2014-06-17 | Siemens Medical Solutions Usa, Inc. | Pressure control in medical diagnostic ultrasound imaging |
| US8532738B2 (en) * | 2010-11-04 | 2013-09-10 | Biosense Webster (Israel), Ltd. | Visualization of catheter-tissue contact by map distortion |
| EP2750609B1 (en) * | 2011-12-08 | 2016-02-03 | Koninklijke Philips N.V. | An examination system with multiple ultrasound transducers |
| US9158383B2 (en) * | 2012-03-02 | 2015-10-13 | Microsoft Technology Licensing, Llc | Force concentrator |
-
2015
- 2015-03-02 EP EP15708609.1A patent/EP3116406A1/en not_active Withdrawn
- 2015-03-02 RU RU2016139689A patent/RU2016139689A/ru not_active Application Discontinuation
- 2015-03-02 CN CN201580013329.4A patent/CN106102592B/zh active Active
- 2015-03-02 US US15/119,146 patent/US20170007202A1/en not_active Abandoned
- 2015-03-02 WO PCT/IB2015/051507 patent/WO2015136402A1/en active Application Filing
- 2015-03-02 JP JP2016555318A patent/JP2017506969A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06142114A (ja) * | 1992-10-30 | 1994-05-24 | Olympus Optical Co Ltd | 体腔内処置装置 |
| JP2006102152A (ja) * | 2004-10-05 | 2006-04-20 | National Institute Of Advanced Industrial & Technology | 触覚センサ及び触覚センサ装置 |
| JP2008183097A (ja) * | 2007-01-29 | 2008-08-14 | Aloka Co Ltd | 経食道プローブ及びそれを備えた超音波診断装置 |
| JP2008220530A (ja) * | 2007-03-09 | 2008-09-25 | Aloka Co Ltd | 体腔内プローブ |
| JP2012513813A (ja) * | 2008-12-29 | 2012-06-21 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | リモートコントロールを備えた超音波撮像システム及びその動作方法 |
| JP2010187936A (ja) * | 2009-02-18 | 2010-09-02 | Fujifilm Corp | 内視鏡 |
| US20120172731A1 (en) * | 2009-09-15 | 2012-07-05 | St. Jude Medical Systems Ab | Rapid exchange guide unit |
| WO2012153703A1 (ja) * | 2011-05-09 | 2012-11-15 | 国立大学法人鳥取大学 | 圧力センサー、内視鏡スコープ、内視鏡裝置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019501728A (ja) * | 2016-01-15 | 2019-01-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 融合画像ガイダンスシステムの注釈を使用した臨床ビューに対する自動化されたプローブステアリング |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2016139689A3 (ja) | 2018-10-15 |
| EP3116406A1 (en) | 2017-01-18 |
| CN106102592B (zh) | 2021-01-22 |
| US20170007202A1 (en) | 2017-01-12 |
| WO2015136402A1 (en) | 2015-09-17 |
| CN106102592A (zh) | 2016-11-09 |
| RU2016139689A (ru) | 2018-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017506969A (ja) | 経食道心エコー超音波トランスデューサプローブのための触覚フィードバックのシステム及び方法 | |
| JP6980065B2 (ja) | ロボット外科用システムトルク変換検知 | |
| US5351677A (en) | Medical system having object information reproduction means for palpation | |
| JP2017506969A5 (ja) | ||
| US9724166B2 (en) | Medical device navigation system | |
| EP2135635B1 (en) | Linear object driving device | |
| US20070074584A1 (en) | Gentle touch surgical instrument and method of using same | |
| JP6931420B2 (ja) | 手術ロボットシステム | |
| WO2015118773A1 (ja) | 挿入装置 | |
| JP2011131059A (ja) | 感圧性カテーテルの校正システム | |
| JP3872210B2 (ja) | カテーテル操作シミュレータ及びそれを用いたシミュレーション方法 | |
| ES2742189T3 (es) | Indicación de enredo del catéter | |
| JPH06154154A (ja) | 管路内挿入装置 | |
| US20190076092A1 (en) | Advanced control features for steering devices for intravascular devices and associated systems and methods | |
| KR101031501B1 (ko) | 초음파 진단장치의 프로브 접속확인장치 | |
| JP2011019550A (ja) | 内視鏡装置及び内視鏡システム並びに内視鏡装置の制御方法 | |
| Vajpeyi et al. | A Novel, Flexible, Full-Length, Pressure-Sensing Sleeve for Colonoscopes | |
| JP2021512758A (ja) | リング色インジケータを備えるカテーテルハンドル | |
| JP3312904B2 (ja) | 診断システム | |
| JP6675678B2 (ja) | 鉗子器具および圧力センサ | |
| WO2017170777A1 (ja) | 内視鏡形状把握システム | |
| JP7267754B2 (ja) | 生体情報モニタおよび生体情報測定システム | |
| JP7538216B2 (ja) | 画像取得用医療デバイス及び医療システム | |
| JPH0352739B2 (ja) | ||
| JP2002010970A (ja) | 診断システム用入出力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180301 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180301 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190419 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191220 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20191220 |
|
| C11 | Written invitation by the commissioner to file amendments |
Free format text: JAPANESE INTERMEDIATE CODE: C11 Effective date: 20200107 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200203 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200204 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200221 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200227 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200402 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20200721 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20200818 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20200818 |