JP2017227652A - Image processing device, image processing method, and image processing program - Google Patents
Image processing device, image processing method, and image processing program Download PDFInfo
- Publication number
- JP2017227652A JP2017227652A JP2017171620A JP2017171620A JP2017227652A JP 2017227652 A JP2017227652 A JP 2017227652A JP 2017171620 A JP2017171620 A JP 2017171620A JP 2017171620 A JP2017171620 A JP 2017171620A JP 2017227652 A JP2017227652 A JP 2017227652A
- Authority
- JP
- Japan
- Prior art keywords
- search
- area
- reachable
- navigation device
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


































Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
この発明は、移動体の残存エネルギー量に基づいて移動体の到達可能範囲を生成する画像処理装置、画像処理方法および画像処理プログラムに関する。ただし、この発明の利用は、画像処理装置、画像処理方法および画像処理プログラムに限らない。 The present invention relates to an image processing apparatus, an image processing method, and an image processing program that generate a reachable range of a moving body based on a residual energy amount of the moving body. However, the use of the present invention is not limited to the image processing apparatus, the image processing method, and the image processing program.
従来、移動体の現在地点に基づいて、移動体の到達可能範囲を生成する処理装置が知られている(例えば、下記特許文献1参照。)。下記特許文献1では、移動体の現在地点を中心に地図上の全方位を放射状に分割し、分割領域ごとに移動体の現在地点から最も遠い到達可能な交差点を地図情報のノードとして取得する。そして、取得した複数のノードを結んで得られるベジュ曲線を移動体の到達可能範囲として表示している。
Conventionally, a processing device that generates a reachable range of a moving body based on the current location of the moving body is known (see, for example,
また、移動体のバッテリー残容量および電力消費量に基づいて、各道路における移動体の現在地点からの到達可能範囲を生成する処理装置が知られている(例えば、下記特許文献2参照。)。下記特許文献2では、移動体の現在地点に接続する複数の道路において移動体の電力消費量を算出し、移動体のバッテリー残容量および電力消費量に基づいて各道路における移動体の走行可能距離を算出する。そして、移動体の現在地点と、当該現在地点から走行可能距離だけ離れた移動体の複数の到達可能地点とを地図情報のノードとして取得し、複数のノードを結んで得られる線分の集合体を移動体の到達可能範囲として表示している。
Also, a processing device is known that generates a reachable range from the current location of a moving body on each road based on the remaining battery capacity and power consumption of the moving body (see, for example,
しかしながら、上述した特許文献1の技術では、移動体の現在地点を中心に各方位における移動体から最も遠い到達地点のみを取得しているので、移動体の到達可能範囲の輪郭しか得られない。このため、移動体の現在地点と移動体から最も遠い到達地点との間に、海や湖など移動体が走行することのできない領域が含まれていたとしても、この移動体が走行することのできない領域を除外して移動体の到達可能範囲を取得することができないという問題点が一例として挙げられる。
However, in the technique of
また、上述した特許文献2の技術では、移動体の到達可能範囲として道路のみを取得しているので、道路以外の範囲を移動体の到達可能範囲に含めることができない。また、移動体の到達可能範囲が移動体の走行可能な道路に沿った線分の集合体で表示されるので、到達可能範囲の輪郭を取得することができない。このため、移動体の到達可能範囲を見やすく、かつ漏れなく表示することが困難であるという問題点が一例として挙げられる。
Moreover, in the technique of
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる画像処理装置は、移動体が保有するエネルギー量に関する情報、および前記移動体が走行する際に消費するエネルギーである推定エネルギー消費量に基づいて、到達可能な地点を探索する探索手段と、前記探索手段の探索処理における探索元地点を含む探索元領域と当該探索元地点からの探索先地点を含む探索先領域に対し、膨張収縮処理を実行して得られる第1領域と、前記探索元領域、前記探索先領域、並びに前記探索元領域および前記探索先領域を結ぶリンクに重複する重複領域に基づき得られる第2領域との合成領域を到達可能範囲として表示手段に表示させる表示制御手段を備えることを特徴とする。 In order to solve the above-described problems and achieve the object, the image processing apparatus according to the first aspect of the present invention provides information on the amount of energy held by the moving body and estimation of energy consumed when the moving body travels. Based on energy consumption, a search means for searching for a reachable point, a search source area including a search source point in the search process of the search means, and a search destination area including a search destination point from the search source point The first area obtained by executing the expansion / contraction process, and the second area obtained based on the search source area, the search destination area, and the overlapping area overlapping the link connecting the search source area and the search destination area And a display control means for causing the display means to display the combined area as a reachable range.
また、請求項2の発明にかかる画像処理方法は、画像処理装置が実行する画像処理方法において、移動体が保有するエネルギー量に関する情報、および前記移動体が走行する際に消費するエネルギーである推定エネルギー消費量に基づいて、到達可能な地点を探索手段により探索する探索工程と、前記探索工程の処理における探索元地点を含む探索元領域と当該探索元地点からの探索先地点を含む探索先領域に対し、膨張収縮処理を実行して得られる第1領域と、前記探索元領域、前記探索先領域、並びに前記探索元領域および前記探索先領域を結ぶリンクに重複する重複領域に基づき得られる第2領域との合成領域を到達可能範囲として表示手段に表示させる表示制御手段が行う表示制御工程と、を含むことを特徴とする。 An image processing method according to a second aspect of the present invention is an image processing method executed by an image processing apparatus, wherein the information relating to the amount of energy held by the moving body and the energy consumed when the moving body travels are estimated. A search step for searching for a reachable point based on energy consumption by a search means, a search source region including a search source point in the processing of the search step, and a search destination region including a search destination point from the search source point On the other hand, the first area obtained by executing the expansion / contraction process, the search source area, the search destination area, and the overlap area overlapping the link connecting the search source area and the search destination area. And a display control step performed by the display control means for displaying the composite area with the two areas on the display means as a reachable range.
また、請求項3の発明にかかる画像処理プログラムは、請求項2に記載の画像処理方法をコンピュータに実行させることを特徴とする。 An image processing program according to a third aspect of the present invention causes a computer to execute the image processing method according to the second aspect.
本実施の形態の画像処理装置、画像処理方法および画像処理プログラムは、移動体が到達可能な領域にまで領域拡大する膨張処理と、膨張処理により拡大された領域から移動体が到達不可能な領域を除外する収縮処理(以下、あわせて膨張収縮処理)とによる弊害を低減する画像処理を実行する。 An image processing apparatus, an image processing method, and an image processing program according to the present embodiment include an expansion process that expands an area up to an area that can be reached by a moving object, and an area that the moving object cannot reach from an area expanded by the expansion process Image processing is performed to reduce the adverse effects caused by the shrinking process (hereinafter also referred to as expansion / shrinking process).
具体的には、例えば、地点を示すノード群と地点間の経路を示すリンク群を含む地図情報において、到達可能ノードが疎な領域で膨張収縮処理を行うとノードが消失してしまうことがある。特に地方や山間部などでは到達可能なノードが消失してしまうことになるため、膨張収縮処理を実行する画像処理装置は、実際の到達可能範囲よりも狭い領域を抽出することになる。また、ノードの密度が高い都市部であっても、メッシュのサイズによってはノード間の距離が離れてしまうために、ノード間が到達可能な領域として連結されない場合がある。また、本来一つの領域であるはずの到達可能範囲が複数に分かれてしまうこともある。 Specifically, for example, in map information including a node group indicating a point and a link group indicating a route between the points, if the expansion / contraction process is performed in an area where the reachable node is sparse, the node may disappear. . In particular, since reachable nodes disappear in rural areas and mountainous areas, an image processing apparatus that performs expansion and contraction processing extracts an area that is narrower than the actual reachable range. Further, even in an urban area where the density of nodes is high, the distance between the nodes may be separated depending on the size of the mesh, so that the nodes may not be connected as reachable areas. In addition, the reachable range, which should originally be one area, may be divided into a plurality of areas.
このため、本実施の形態では、ノードの密度に関わらず、到達可能範囲を抽出することが可能であり、複数に分割されてしまう到達可能範囲を一つの領域にまとめることができる画像処理装置および画像処理方法を提供する。本実施の形態にかかる画像処理装置および画像処理方法は、メッシュのサイズに依らず適用することができる。また、本実施の形態にかかる画像処理装置および画像処理方法は、到達可能な道路に沿って図形が描画されるため、精度の向上を図ることができる。 For this reason, in the present embodiment, it is possible to extract a reachable range regardless of the node density, and an image processing apparatus capable of collecting a reachable range that is divided into a plurality of areas into one region An image processing method is provided. The image processing apparatus and the image processing method according to the present embodiment can be applied regardless of the mesh size. In addition, the image processing apparatus and the image processing method according to the present embodiment can improve accuracy because graphics are drawn along a reachable road.
さらに、本実施の形態にかかる画像処理装置および画像処理方法は、道路形状に沿った到達可能領域の抽出作業を背景技術の項で示した方法とは独立して適用することができるため、道路形状に沿った到達可能範囲の抽出方法を自由に選択することもできる。例えば、本実施の形態にかかる画像処理装置および画像処理方法では、道路形状に沿って描画する線の太さを変えたり、線を描画した後で膨張収縮を行うことが可能である。 Furthermore, since the image processing apparatus and the image processing method according to the present embodiment can apply the extraction operation of the reachable area along the road shape independently from the method shown in the background art section, It is also possible to freely select a method for extracting a reachable range along the shape. For example, in the image processing apparatus and the image processing method according to the present embodiment, it is possible to change the thickness of a line drawn along a road shape, or to perform expansion / contraction after drawing a line.
以下に添付図面を参照して、この発明にかかる画像処理装置、画像処理方法および画像処理プログラムの好適な実施の形態を詳細に説明する。 Exemplary embodiments of an image processing apparatus, an image processing method, and an image processing program according to the present invention are explained in detail below with reference to the accompanying drawings.
(実施の形態1)
<画像処理例>
図1は、本実施の形態にかかる画像処理装置および画像処理方法による画像処理例を示す説明図である。図1では、複数の領域に分割されたメッシュである地図情報100が示される。また、図1では、移動体の現在地点を出発点Sとして、移動体の到達可能地点を示している。図1中、矢印の始端および終端は、地図情報100におけるノード群のうち探索されたノードに対応する。また、矢印は、地図情報100におけるリンク群のうち探索されたノード間を結ぶリンクに対応する。画像処理装置は、移動体の残存エネルギー量に基づいて、出発点から移動体の到達可能地点を探索し、探索された到達可能地点を始点としてさらに到達可能地点を探索する。
(Embodiment 1)
<Image processing example>
FIG. 1 is an explanatory diagram illustrating an example of image processing by the image processing apparatus and the image processing method according to the present embodiment. FIG. 1 shows map
ここで、探索の始点を「探索元地点」と称し、探索された到達可能地点を「探索先地点」と称す。探索元地点が移動体の現在地点であれば、あるリンク上の位置を示し、探索元地点が直前の探索先地点であれば、その直前の探索先地点に対応するノードを示す。このような探索を繰り返すことにより、移動体の現在地点から再遠の到達可能地点を探索することができる。なお、探索の詳細については後述する。 Here, the starting point of the search is referred to as “search source point”, and the searched reachable point is referred to as “search destination point”. If the search source point is the current position of the mobile object, the position on a certain link is indicated. If the search source point is the immediately preceding search destination point, a node corresponding to the immediately preceding search destination point is indicated. By repeating such a search, it is possible to search for a reachable point far from the current point of the moving object. Details of the search will be described later.
(A)は、上述した探索後の状態を示している。(A)では、探索元地点(矢印の始端に対応)が存在する領域と探索先地点(矢印の終端に対応)が存在する領域が便宜上塗りつぶされているが、実際にはまだプロットされていないものとする。また、探索元地点が存在する領域を探索元領域、探索先地点が存在する領域を探索先領域と称す。 (A) has shown the state after the search mentioned above. In (A), the area where the search source point (corresponding to the start of the arrow) and the area where the search destination point (corresponding to the end of the arrow) exist are filled for convenience, but are not yet plotted in practice. Shall. An area where the search source point exists is called a search source area, and an area where the search destination point exists is called a search destination area.
(B)は、(A)の次状態を示している。(B)では、探索元領域と探索先領域との間のメッシュであって、探索されたリンクが存在するメッシュが塗りつぶされている。探索元領域と探索先領域との間の領域(探索元領域と探索先領域を除く)であって、探索されたリンクが存在する領域を、重複領域と称す。(B)では、重複領域が到達可能な領域として塗りつぶされる。 (B) shows the next state of (A). In (B), the mesh between the search source region and the search destination region, where the searched link exists, is filled. An area between the search source area and the search destination area (excluding the search source area and the search destination area) where the searched link exists is referred to as an overlapping area. In (B), the overlapping area is filled as an reachable area.
(C)は、(B)の次状態を示している。(C)では、(A)および(B)で塗りつぶされた各領域の上下4領域が塗りつぶされている。(C)における塗りつぶされた領域群が、移動体の到達可能範囲となる。(A)〜(C)の処理により、上述した膨張収縮処理を実行しなくても、移動体の到達可能範囲を、欠損点を発生することなく表現することができる。 (C) shows the next state of (B). In (C), four areas above and below each area painted in (A) and (B) are painted. The filled area group in (C) is the reachable range of the moving object. By the processes (A) to (C), the reachable range of the moving object can be expressed without generating a missing point without performing the above-described expansion / contraction process.
<ハードウェア構成>
つぎに、上述した図1の(A)〜(C)を実行する装置のハードウェア構成について説明する。画像処理装置は、例えば、車両などの移動体に搭載されるナビゲーション装置200に適用される。以下、画像処理装置の機能を有するナビゲーション装置のハードウェア構成例について説明する。
<Hardware configuration>
Next, a hardware configuration of an apparatus that executes the above-described (A) to (C) of FIG. 1 will be described. The image processing device is applied to, for example, a
図2は、ナビゲーション装置のハードウェア構成を示すブロック図である。図2において、ナビゲーション装置200は、CPU201、ROM202、RAM203、磁気ディスクドライブ204、磁気ディスク205、光ディスクドライブ206、光ディスク207、音声I/F(インターフェース)208、マイク209、スピーカ210、入力デバイス211、映像I/F212、ディスプレイ213、カメラ214、通信I/F215、GPSユニット216、各種センサ217を備えている。各構成部201〜217は、バス220によってそれぞれ接続されている。
FIG. 2 is a block diagram illustrating a hardware configuration of the navigation device. 2, the
CPU201は、ナビゲーション装置200の全体の制御を司る。ROM202は、ブートプログラム、推定エネルギー消費量算出プログラム、到達可能地点探索プログラム、識別情報付与プログラム、地図データ表示プログラムなどのプログラムを記録している。RAM203は、CPU201のワークエリアとして使用される。すなわち、CPU201は、RAM203をワークエリアとして使用しながら、ROM202に記録された各種プログラムを実行することによって、ナビゲーション装置200の全体の制御を司る。
The
推定エネルギー消費量算出プログラムでは、車両の推定エネルギー消費量を算出する消費エネルギー推定式に基づいて、一のノードと隣り合うノードとを結ぶリンクにおける推定エネルギー消費量を算出する。到達可能地点探索プログラムでは、推定プログラムにおいて算出された推定エネルギー消費量に基づいて、車両の現在地点での残存エネルギー量で到達可能な複数の地点(ノード)が探索される。識別情報付与プログラムでは、探索プログラムにおいて探索された複数の到達可能地点に基づいて、地図情報100を分割した複数の領域に、車両が到達可能または到達不可能であることを識別する識別情報が付与される。地図データ表示プログラムでは、識別情報付与プログラムによって識別情報が付与された複数の領域に基づいて、車両の到達可能範囲をディスプレイ213に表示させる。
In the estimated energy consumption calculation program, an estimated energy consumption in a link connecting one node and an adjacent node is calculated based on a consumption energy estimation expression for calculating an estimated energy consumption of the vehicle. In the reachable point search program, a plurality of points (nodes) that can be reached with the remaining energy amount at the current point of the vehicle are searched based on the estimated energy consumption calculated in the estimation program. In the identification information addition program, identification information for identifying whether the vehicle is reachable or unreachable is assigned to a plurality of areas obtained by dividing the
磁気ディスクドライブ204は、CPU201の制御にしたがって磁気ディスク205に対するデータの読み取り/書き込みを制御する。磁気ディスク205は、磁気ディスクドライブ204の制御で書き込まれたデータを記録する。磁気ディスク205としては、例えば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
The
また、光ディスクドライブ206は、CPU201の制御にしたがって光ディスク207に対するデータの読み取り/書き込みを制御する。光ディスク207は、光ディスクドライブ206の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク207は、書き込み可能な記録媒体を利用することもできる。着脱可能な記録媒体として、光ディスク207のほか、MO、メモリカードなどを用いることができる。
The
磁気ディスク205および光ディスク207に記録される情報の一例としては、地図データ、車両情報、道路情報、走行履歴などが挙げられる。地図データは、カーナビゲーションシステムにおいて車両の到達可能地点を探索するときや、車両の到達可能範囲を表示するときに用いられ、建物、河川、地表面などの地物(フィーチャ)をあらわす背景データ、道路の形状をリンクやノードなどであらわす道路形状データなどを含むベクタデータである。
Examples of information recorded on the
音声I/F208は、音声入力用のマイク209および音声出力用のスピーカ210に接続される。マイク209に受音された音声は、音声I/F208内でA/D変換される。マイク209は、例えば、車両のダッシュボード部などに設置され、その数は単数でも複数でもよい。スピーカ210からは、所定の音声信号を音声I/F208内でD/A変換した音声が出力される。
The audio I /
入力デバイス211は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、タッチパネルなどが挙げられる。入力デバイス211は、リモコン、キーボード、タッチパネルのうちいずれか1つの形態によって実現されてもよいが、複数の形態によって実現することも可能である。
Examples of the
映像I/F212は、ディスプレイ213に接続される。映像I/F212は、具体的には、例えば、ディスプレイ213全体を制御するグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいてディスプレイ213を制御する制御ICなどによって構成される。
The video I /
ディスプレイ213には、アイコン、カーソル、メニュー、ウインドウ、あるいは文字や画像などの各種データが表示される。ディスプレイ213としては、例えば、TFT液晶ディスプレイ、有機ELディスプレイなどを用いることができる。
The
カメラ214は、車両内部あるいは外部の映像を撮影する。映像は静止画あるいは動画のどちらでもよく、例えば、カメラ214によって車両外部を撮影し、撮影した画像をCPU201において画像解析したり、映像I/F212を介して磁気ディスク205や光ディスク207などの記録媒体に出力したりする。
The
通信I/F215は、無線を介してネットワークに接続され、ナビゲーション装置200およびCPU201のインターフェースとして機能する。ネットワークとして機能する通信網には、CANやLIN(Local Interconnect Network)などの車内通信網や、公衆回線網や携帯電話網、DSRC(Dedicated Short Range Communication)、LAN、WANなどがある。通信I/F215は、例えば、公衆回線用接続モジュールやETC(ノンストップ自動料金支払いシステム)ユニット、FMチューナー、VICS(Vehicle Information and Communication System:登録商標)/ビーコンレシーバなどである。
The communication I /
GPSユニット216は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット216の出力情報は、後述する各種センサ217の出力値とともに、CPU201による車両の現在位置の算出に際して利用される。現在位置を示す情報は、例えば、緯度・経度、高度などの、地図データ上の1点を特定する情報である。
The
各種センサ217は、車速センサ、加速度センサ、角速度センサ、傾斜センサなどの、車両の位置や挙動を判断するための情報を出力する。各種センサ217の出力値は、CPU201による車両の現在位置の算出や、速度や方位の変化量の算出に用いられる。
The
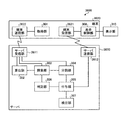
<機能的構成例>
図3は、画像処理装置の機能的構成例を示すブロック図である。図3において、画像処理装置300は、取得部301と、算出部302と、探索部303と、分割部304と、付与部305と、判定部306と、検出部307と、表示制御部308と、を有する。取得部301〜表示制御部308は、上述したナビゲーション装置200におけるROM202、RAM203、磁気ディスク205、光ディスク207などに記録されたプログラムやデータを用いて、CPU201が所定のプログラムを実行し、ナビゲーション装置200における各部を制御することによってその機能を実現する。
<Functional configuration example>
FIG. 3 is a block diagram illustrating a functional configuration example of the image processing apparatus. In FIG. 3, the
画像処理装置300は、移動体の残存エネルギー量に基づいて探索された移動体の到達可能地点に基づいて移動体の到達可能範囲を生成し表示部310に表示させる。ここで、エネルギーとは、例えば、移動体がEV(Electric Vehicle)車などの場合、電気などに基づくエネルギーであり、HV(Hybrid Vehicle)車、PHV(Plug−in Hybrid Vehicle)車などの場合は電気などに基づくエネルギーおよび、例えばガソリンや軽油、ガスなどに基づくエネルギーである。
The
また、エネルギーとは、移動体が例えば燃料電池車の場合、電気などに基づくエネルギーおよび、例えば水素や水素原料になる化石燃料などである(以下、EV車、HV車、PHV車、燃料電池車は単に「EV車」という)。また、エネルギーとは、移動体が、例えば、ガソリン車、ディーゼル車など(以下、単に「ガソリン車」という)の場合、例えば、ガソリンや軽油、ガスなどに基づくエネルギーである。また、残存エネルギーとは、例えば、移動体の燃料タンクやバッテリー内、高圧タンクなどに残っているエネルギーであり、後の移動体の走行に用いることのできるエネルギーである。 In addition, when the mobile body is, for example, a fuel cell vehicle, the energy is energy based on electricity and the like, for example, hydrogen or fossil fuel that becomes a hydrogen raw material (hereinafter, EV vehicle, HV vehicle, PHV vehicle, fuel cell vehicle) Is simply called "EV car"). In addition, the energy is energy based on, for example, gasoline, light oil, gas, or the like when the moving body is, for example, a gasoline vehicle, a diesel vehicle, or the like (hereinafter simply referred to as “gasoline vehicle”). The residual energy is, for example, energy remaining in a fuel tank, a battery, a high-pressure tank, or the like of the mobile body, and is energy that can be used for the subsequent travel of the mobile body.
取得部301は、画像処理装置300を搭載した移動体の現在地点に関する情報や、移動体の現在地点において当該移動体が保有するエネルギー量である初期保有エネルギー量に関する情報を取得する。具体的には、取得部301は、例えば、GPS衛星から受信したGPS情報などを用いて、自装置の現在位置を算出することによって現在地点に関する情報(位置情報)を取得する。
The
また、取得部301は、例えば、CAN(Controller Area Network)など通信プロトコルによって動作する車内通信網を介して、エレクトロニックコントロールユニット(ECU:Electronic Control Unit)によって管理されている移動体の残存エネルギー量を、初期保有エネルギー量として取得する。
In addition, the
取得部301は、移動体の速度に関する情報や、渋滞情報、移動体情報を取得してもよい。移動体の速度に関する情報とは、移動体の速度、加速度である。また、取得部301は、例えば、記憶部(不図示)に記憶された地図情報100から道路に関する情報を取得してもよいし、傾斜センサなどから道路勾配などを取得してもよい。道路に関する情報とは、例えば、道路種別や、道路勾配、路面状況などにより移動体に生じる走行抵抗である。
The
算出部302は、移動体が所定区間を走行する際に消費するエネルギーである推定エネルギー消費量を算出する。所定区間とは、例えば、道路上の一の所定地点(以下、「ノード」とする)と当該一のノードに隣り合う他のノードとを結ぶ区間(以下、「リンク」とする)である。ノードとは、例えば、交差点やスタンドであってもよいし、所定の距離で区切られたリンク間の接続地点であってもよい。ノードおよびリンクは、記憶部に記憶された地図情報100を構成する。地図情報100は、例えば、交差点(点)、道路(線や曲線)、領域(面)やこれらを表示する色などを数値化したベクタデータで構成される。
The
具体的には、算出部302は、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式に基づいて、所定区間における推定エネルギー消費量を推定する。より具体的には、算出部302は、移動体の速度に関する情報や移動体情報に基づいて、所定区間における推定エネルギー消費量を推定する。移動体情報とは、移動体の重量(乗車人数や積載荷物による重量も含む)、回転体の重量など、移動体走行時に消費または回収されるエネルギー量を変化させる要因となる情報である。なお、道路勾配が明らかな場合、算出部302は、さらに第四情報を加えた消費エネルギー推定式に基づいて、所定区間における推定エネルギー消費量を推定してもよい。
Specifically, the
消費エネルギー推定式とは、所定区間における移動体のエネルギー消費量を推定する推定式である。具体的には、消費エネルギー推定式は、エネルギー消費量を増減させる異なる要因である第一情報、第二情報および第三情報からなる多項式である。また、道路勾配が明らかな場合、消費エネルギー推定式には、さらに第四情報が加えられる。消費エネルギー推定式についての詳細な説明は後述する。 The consumption energy estimation formula is an estimation formula for estimating the energy consumption amount of the moving body in a predetermined section. Specifically, the energy consumption estimation formula is a polynomial composed of first information, second information, and third information, which are different factors that increase or decrease energy consumption. Further, when the road gradient is clear, fourth information is further added to the energy consumption estimation formula. Detailed description of the energy consumption estimation formula will be described later.
第一情報は、移動体に備えられた装備品により消費されるエネルギーに関する情報である。例えば、移動体に搭載された駆動源が稼動した状態における移動体の停止時に消費されるエネルギーに関する情報である。駆動源が稼動した状態における移動体の停止時とは、移動体のエンジンに負荷がかからない程度に、エンジンを低速で空回りさせた状態である。すなわち、駆動源が可動した状態における移動体の停止時とは、アイドリング時である。EV車の場合、駆動源が可動した状態における移動体の停止時とは、移動体の停止状態であり、アクセルを踏めば、駆動源であるモータが可動し始める状態である。 The first information is information related to energy consumed by the equipment provided in the moving body. For example, it is information relating to energy consumed when the moving body is stopped in a state where the drive source mounted on the moving body is in operation. When the moving body is stopped when the drive source is in operation, the engine is idled at a low speed to such an extent that no load is applied to the engine of the moving body. That is, when the moving body is stopped in a state where the drive source is movable, the idling is performed. In the case of an EV vehicle, when the moving body is stopped in a state where the driving source is movable, the moving body is in a stopped state, and when the accelerator is stepped on, the motor as the driving source starts to move.
具体的には、第一情報は、例えば、エンジンをかけたまま停車しているときや、信号などで停止しているときに消費されるエネルギー消費量である。すなわち、第一情報は、移動体の走行に関係しない要因で消費されるエネルギー消費量であり、移動体に備えられたエアコンやオーディオなどによるエネルギー消費量である。第一情報は、EV車の場合、ほぼゼロとしてもよい。 Specifically, the first information is, for example, energy consumption consumed when the vehicle is stopped with the engine running or when it is stopped by a signal or the like. That is, the first information is an energy consumption amount consumed due to factors not related to the traveling of the moving body, and is an energy consumption amount due to an air conditioner or an audio provided in the moving body. The first information may be substantially zero in the case of an EV vehicle.
第二情報は、移動体の加減速時に消費および回収されるエネルギーに関する情報である。移動体の加減速時とは、移動体の速度が時間的に変化している走行状態である。具体的には、移動体の加減速時とは、所定時間内において、移動体の速度が変化する走行状態である。所定時間とは、一定間隔の時間の区切りであり、例えば、単位時間あたりなどである。回収されるエネルギーとは、EV車の場合、例えば、移動体の走行時にバッテリーに充電される電力である。また、回収されるエネルギーとは、ガソリン車の場合、例えば、消費される燃料を低減(燃料カット)し節約することのできる燃料である。 The second information is information related to energy consumed and recovered during acceleration / deceleration of the moving body. The time of acceleration / deceleration of the moving body is a traveling state in which the speed of the moving body changes with time. Specifically, the time of acceleration / deceleration of the moving body is a traveling state in which the speed of the moving body changes within a predetermined time. The predetermined time is a time interval at regular intervals, for example, per unit time. In the case of an EV vehicle, the recovered energy is, for example, electric power charged in a battery when the mobile body is traveling. In the case of a gasoline vehicle, the recovered energy is, for example, fuel that can be saved by reducing (fuel cut) the consumed fuel.
第三情報は、移動体の走行時に生じる抵抗により消費されるエネルギーに関する情報である。移動体の走行時とは、所定時間内において、移動体の速度が一定、加速もしくは減速している走行状態である。移動体の走行時に生じる抵抗とは、移動体の走行時に移動体の走行状態を変化させる要因である。具体的には、移動体の走行時に生じる抵抗とは、気象状況、道路状況、車両状況などにより移動体に生じる各種抵抗である。 The third information is information related to energy consumed by the resistance generated when the mobile object travels. The traveling time of the moving body is a traveling state where the speed of the moving body is constant, accelerated or decelerated within a predetermined time. The resistance generated when the mobile body travels is a factor that changes the travel state of the mobile body when the mobile body travels. Specifically, the resistance generated when the mobile body travels is various resistances generated in the mobile body due to weather conditions, road conditions, vehicle conditions, and the like.
気象状況により移動体に生じる抵抗とは、例えば、雨、風などの気象変化による空気抵抗である。道路状況により移動体に生じる抵抗とは、道路勾配、路面の舗装状態、路面上の水などによる路面抵抗である。車両状況により移動体に生じる抵抗とは、タイヤの空気圧、乗車人数、積載重量などにより移動体にかかる負荷抵抗である。 The resistance generated in the moving body due to the weather condition is, for example, air resistance due to weather changes such as rain and wind. The resistance generated in the moving body according to the road condition is road resistance due to road gradient, pavement state of road surface, water on the road surface, and the like. The resistance generated in the moving body depending on the vehicle condition is a load resistance applied to the moving body due to tire air pressure, number of passengers, loaded weight, and the like.
具体的には、第三情報は、空気抵抗や路面抵抗、負荷抵抗を受けた状態で、移動体を一定速度、加速もしくは減速で走行させたときのエネルギー消費量である。より具体的には、第三情報は、例えば、向かい風により移動体に生じる空気抵抗や、舗装されていない道路から受ける路面抵抗などを、移動体が一定速度、加速もしくは減速で走行するときに消費されるエネルギー消費量である。 Specifically, the third information is energy consumption when the moving body is driven at a constant speed, acceleration or deceleration while receiving air resistance, road surface resistance, and load resistance. More specifically, the third information is consumed when the moving body travels at a constant speed, acceleration or deceleration, for example, air resistance generated in the moving body due to a headwind or road surface resistance received from a road that is not paved. Energy consumption.
第四情報は、移動体が位置する高度の変化により消費および回収されるエネルギーに関する情報である。移動体が位置する高度の変化とは、移動体の位置する高度が時間的に変化している状態である。具体的には、移動体が位置する高度の変化とは、所定時間内において、移動体が勾配のある道路を走行することにより高度が変化する走行状態である。 The fourth information is information relating to energy consumed and recovered by a change in altitude at which the mobile object is located. The change in altitude at which the moving body is located is a state in which the altitude at which the moving body is located changes over time. Specifically, the change in altitude at which the moving body is located is a traveling state in which the altitude changes when the moving body travels on a sloped road within a predetermined time.
また、第四情報は、所定区間内における道路勾配が明らかな場合に求めることができる付加的な情報であり、これによりエネルギー消費量の推定精度を向上することができる。なお、道路の傾斜が不明な場合、または計算を簡略化する場合、移動体が位置する高度の変化はないものとして、後述する消費エネルギー推定式における道路勾配θ=0としてエネルギー消費量を推定することができる。 Further, the fourth information is additional information that can be obtained when the road gradient in the predetermined section is clear, thereby improving the energy consumption estimation accuracy. When the road slope is unknown or when the calculation is simplified, it is assumed that there is no change in the altitude at which the moving body is located, and the energy consumption is estimated with the road gradient θ = 0 in the energy consumption estimation formula described later. be able to.
探索部303は、記憶部に記憶された地図情報100、取得部301によって取得された移動体の現在地点および初期保有エネルギー量、並びに算出部302によって算出された推定エネルギー消費量に基づいて、移動体が現在地点から到達可能な地点である複数の到達可能地点を探索する。
The
具体的には、探索部303は、移動体の現在地点から移動可能なすべての経路において、それぞれ、移動体の現在地点を始点とし、移動体からの経路上の所定地点どうしを結ぶ所定区間における推定エネルギー消費量の累計が最小となるように所定地点および所定区間を探索する。そして、探索部303は、移動体の現在地点から移動可能なすべての経路において、それぞれ、推定エネルギー消費量の累計が移動体の現時点での初期保有エネルギー量の範囲内にある所定地点を移動体の到達可能地点とする。
Specifically, the
より具体的には、探索部303は、移動体の現在地点を始点として、移動体の現在地点から移動可能なすべてのリンク、これらのリンクにそれぞれ接続するノード、これらのノードから移動可能なすべてのリンクと、移動体の到達可能なすべてのノードおよびリンクを順に探索する。このとき、探索部303は、新たな一のリンクを探索するごとに、一のリンクが接続する経路の推定エネルギー消費量を累計し、推定エネルギー消費量の累計が最小となるように当該一のリンクに接続するノードおよびこのノードに接続する複数のリンクを探索する。
More specifically, the
例えば、探索部303は、当該一のリンクおよび他のリンクが同一のノードに接続されている場合、このノードに接続する複数のリンクのうち、移動体の現在地点から当該ノードまでの推定エネルギー消費量の累計の少ないリンクの推定エネルギー消費量を使って当該ノードの推定エネルギー消費量の累計を算出する。そして、探索部303は、探索されたノードおよびリンクで構成される複数の経路において、それぞれ、推定エネルギー消費量の累計が移動体の初期保有エネルギー量の範囲内にあるすべてのノードを移動体の到達可能地点として探索する。このように推定エネルギー消費量の少ないリンクの推定エネルギー消費量を使うことにより、当該ノードの推定エネルギー消費量の正しい累計を算出することができる。
For example, when the one link and the other link are connected to the same node, the
また、探索部303は、移動体の移動が禁止された所定区間を、移動体の到達可能地点を探索するための候補から除いて当該到達可能地点を探索してもよい。移動体の移動が禁止された所定区間とは、例えば、一方通行の逆走となるリンク、時間規制や季節規制により通行禁止区間となるリンクである。時間規制とは、例えば、通学路や行事などに設定されることにより、ある時間帯で通行が禁止されることである。季節規制とは、例えば、大雨や大雪などにより通行が禁止されることである。
In addition, the
探索部303は、複数の所定区間のうち、一の所定区間の次に選択する他の所定区間の重要度が当該一の所定区間の重要度よりも低い場合、他の所定区間を、移動体の到達可能地点を探索するための候補から除いて当該到達可能地点を探索してもよい。所定区間の重要度とは、例えば、道路種別などである。道路種別とは、法定速度や、道路の勾配、道路幅、信号の有無などの道路状態の違いにより区別することのできる道路の種類である。具体的には、道路種別とは、一般国道、高速道路、一般道路、市街地などを通る細街路などである。細街路とは、例えば、市街地内にある幅員4メートル未満の建築基準法に規定された道路である。
When the importance of another predetermined section selected next to one predetermined section among the plurality of predetermined sections is lower than the importance of the one predetermined section, the
さらに、探索部303は、一の橋または一のトンネルの入口および出口が移動体の到達可能地点となる場合、分割部304によって分割される地図情報100の一の橋または一のトンネルを構成するすべての領域が移動体の到達可能範囲に含まれるように移動体の到達可能地点を探索するのが好ましい。具体的には、探索部303は、例えば、一の橋または一のトンネルの入口が移動体の到達可能地点となる場合、一の橋または一のトンネルの入口から出口に向かって、一の橋または一のトンネル上に複数の到達可能地点が探索されるように当該到達可能地点を探索してもよい。一の橋または一のトンネルの入口とは、一の橋または一のトンネルの、移動体の現在地点に近い側の始点である。なお、探索部303によって得られた探索元地点と探索先地点との組み合わせは、それぞれ記憶部に格納される。
Further, when the entrance and the exit of one bridge or one tunnel are reachable points of the moving body, the
分割部304は、地図情報100を複数の領域に分割する。具体的には、分割部304は、探索部303によって探索された移動体の複数の到達可能地点のうち、移動体の現在地点から最も離れた到達可能地点に基づいて、地図情報100を複数の矩形状の領域に分割し、例えばm×mドットのメッシュに変換する。m×mドットのメッシュは、後述する付与部305によって識別情報が付与されたラスタデータ(画像データ)として扱われる。なお、m×mドットのそれぞれのmは同じ数値でも構わないし、異なる数値でも構わない。
The dividing
より具体的には、分割部304は、最大経度、最小経度、最大緯度、最小緯度を抽出し移動体の現在地点からの距離を算出する。そして、分割部304は、例えば、移動体の現在地点から最も遠い到達可能地点と移動体の現在地点とをn等分したときの一の領域の大きさを、地図情報100を複数の領域に分割したときの一の領域の大きさとし、地図情報100をm×mドットのメッシュに分割する。このとき、メッシュの周辺の例えば4ドット分を空白にするために、n=(m/2)−4とする。
More specifically, the dividing
付与部305は、探索部303によって探索された組み合わせごとに、複数の領域のうち、探索元地点を含む探索元領域と探索先地点を含む探索先領域との間に存在し、かつ、探索元地点と探索先地点とを結ぶリンクに重複する重複領域に対し、移動体が到達可能であることを示す識別情報を付与する。また、付与部305は、探索元領域および探索先領域に対し識別情報を付与する。具体的には、例えば、付与部305は、図1の(B)に示した重複領域に対し、移動体が到達可能な領域であることを示す識別情報を付与する。
The assigning
同様に、付与部305は、図1の(A)に示した探索元領域および探索先領域に対し、移動体が到達可能な領域であることを示す識別情報(例えば、「1」)を付与する。なお、移動体が到達可能な領域であることを示す識別情報(例えば、「1」)が付与されなかった残余の領域群については、付与部305は、移動体が到達不可能であることを示す識別情報(例えば、「0」)を付与する。これにより、付与部305は、m行m列の領域群である2次元行列データに変換する。分割部304および付与部305は、このように地図情報100を分割してm行m列の領域群である2次元行列データに変換し、2値化されたラスタデータとして扱う。
Similarly, the assigning
また、付与部305は、地図情報100の一の橋または一のトンネルの入口および出口に相当する分割された地図情報100に、到達可能であることを識別する到達可能の識別情報が付与されている場合、当該一の橋または当該一のトンネルを構成するすべての領域に相当する分割された地図情報100に、到達可能の識別手段を付与する。具体的には、付与部305は、例えば、一の橋または一のトンネルの入口および出口に相当する各領域にそれぞれ到達可能の識別情報が付与されている場合、一の橋または一のトンネルの入口に相当する領域から出口に相当する領域に至るまでに移動体が移動可能な全領域に到達可能の識別情報を付与する。
In addition, when the
判定部306は、探索元領域と探索先領域との間の距離が所定距離以上であるか否かを判定する。具体的には、例えば、所定距離とは、1メッシュ分の距離よりも大きい値である。したがって、探索元地点と探索先地点が同一メッシュに存在する場合、探索元領域と探索先領域との距離は0である。また、探索元地点と探索先地点が隣接メッシュに存在する場合、探索元領域と探索先領域との距離は1である。したがって、これらの場合、所定距離未満となり、重複領域が存在しないことになる。一方、所定距離以上である場合、重複領域が存在することになるため、付与部305は、重複領域に対し移動体が到達可能であることを示す識別情報を付与する。
The
検出部307は、探索元領域から探索先領域への方向を検出する。具体的には、例えば、検出部307は、探索元領域内の探索元地点から探索先領域内の探索先地点を結ぶリンクの方向により、探索元領域から探索先領域への方向を検出する。検出結果の活用例については後述する。
The
表示制御部308は、付与部305によって付与された識別情報群に基づいて、移動体の到達可能範囲を表示部310に表示させる。具体的には、表示制御部308は、付与部305によって識別情報が付与された複数のメッシュを示す2次元行列データをベクタデータに変換し、記憶部に記憶された地図情報100とともに表示部310に表示させる。
The
より具体的には、表示制御部308は、到達可能の識別情報が付与された一の領域と当該一の領域と隣り合う到達可能の識別情報が付与された他の領域との位置関係に基づいて移動体の到達可能範囲の輪郭を抽出し表示部310に表示させる。より具体的には、表示制御部308は、例えば、フリーマンのチェインコードを用いて移動体の到達可能範囲の輪郭を抽出し、移動体の到達可能範囲を表示部310に表示させる。
More specifically, the
また、表示制御部308は、到達可能の識別情報が付与された領域の経度緯度情報に基づいて移動体の到達可能範囲を抽出し、表示部310に表示させてもよい。具体的には、表示制御部308は、例えば、m行m列の2次元行列データを1行ごとに1列目から到達可能の識別情報「1」を検索する。そして、表示制御部308は、2次元行列データの各行においてそれぞれ到達可能の識別情報「1」を含む連続する領域を検索し、最初に「1」を検出した領域の最小経度、最小緯度(領域の左上座標)と、最後に「1」を検出した領域の最大経度、最大緯度(領域の右下座標)とを結ぶ線分を対角線とする矩形領域を移動体の到達可能範囲として表示する。
In addition, the
<算出部302による推定エネルギー消費量算出例>
本実施例のナビゲーション装置200は、自装置が搭載された車両の推定エネルギー消費量を算出する。具体的には、ナビゲーション装置200は、例えば、速度、加速度、車両の勾配に基づいて、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式のいずれか一つ以上の式を用いて、所定区間における車両の推定エネルギー消費量を算出する。所定区間とは、道路上の一のノード(例えば交差点)と当該一のノードに隣り合う他のノードとを結ぶリンクである。
<Example of Calculation of Estimated Energy Consumption by
The
より具体的には、ナビゲーション装置200は、プローブで提供される渋滞情報や、サーバを介して取得した渋滞予測データ、記憶装置に記憶されたリンクの長さや道路種別などに基づいて、車両がリンクを走行し終わるのに要する旅行時間を算出する。そして、ナビゲーション装置200は、次の(1)式〜(4)式に示す消費エネルギー推定式のいずれかを用いて単位時間当たりの推定エネルギー消費量を算出し、車両がリンクを旅行時間で走行し終える際の推定エネルギー消費量を算出する。
More specifically, the

上記(1)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりの消費エネルギーを推定する理論式である。ここで、εは正味熱効率、ηは総伝達効率である。移動体の加速度αと道路勾配θから重力の加速度gとの合計を合成加速度|α|とすると、合成加速度|α|が負の場合の消費エネルギー推定式は、上記(2)式で表される。すなわち、上記(2)式に示す消費エネルギー推定式は、減速時における単位時間当たりの消費エネルギーを推定する理論式である。このように、加減速時および走行時における単位時間当たりの消費エネルギー推定式は、走行抵抗と走行距離と正味モータ効率と伝達効率との積であらわされる。 The energy consumption estimation formula shown in the above equation (1) is a theoretical formula for estimating the energy consumption per unit time during acceleration and traveling. Where ε is the net thermal efficiency and η is the total transmission efficiency. Assuming that the sum of the acceleration α of the moving object and the acceleration of gravity g from the road gradient θ is the combined acceleration | α |, the energy consumption estimation formula when the combined acceleration | α | is negative is expressed by the above equation (2). The That is, the energy consumption estimation formula shown in the above equation (2) is a theoretical formula for estimating the energy consumption per unit time during deceleration. Thus, the energy consumption estimation formula per unit time during acceleration / deceleration and travel is expressed by the product of travel resistance, travel distance, net motor efficiency, and transmission efficiency.
上記(1)式および(2)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、勾配成分によるエネルギー消費量(第四情報)および転がり抵抗成分によるエネルギー消費量(第三情報)である。右辺第3項は、空気抵抗成分によるエネルギー消費量(第三情報)である。また、(1)式の右辺第4項は、加速成分によるエネルギー消費量(第二情報)である。(2)式の右辺第4項は、減速成分によるエネルギー消費量(第二情報)である。 In the above formulas (1) and (2), the first term on the right side is the energy consumption (first information) during idling. The second term on the right side is the energy consumption (fourth information) due to the gradient component and the energy consumption (third information) due to the rolling resistance component. The third term on the right side is energy consumption (third information) due to the air resistance component. Further, the fourth term on the right side of the equation (1) is the energy consumption (second information) by the acceleration component. The fourth term on the right side of equation (2) is the energy consumption (second information) due to the deceleration component.
上記(1)式および(2)式では、モータ効率と駆動効率は一定と見なしている。しかし、実際には、モータ効率および駆動効率はモータ回転数やトルクの影響により変動する。そこで、次の(3)式および(4)式に単位時間当たりの消費エネルギーを推定する実証式を示す。 In the above formulas (1) and (2), the motor efficiency and the drive efficiency are considered to be constant. However, in practice, the motor efficiency and the driving efficiency vary due to the influence of the motor speed and torque. Therefore, the following equations (3) and (4) show empirical equations for estimating the energy consumption per unit time.
合成加速度|α+g・sinθ|が正の場合の推定エネルギー消費量を算出する実証式、すなわち、加速時および走行時における単位時間当たりの推定エネルギー消費量を算出する実証式は、次の(3)式であらわされる。また、合成加速度|α+g・sinθ|が負の場合の推定エネルギー消費量を算出する実証式、すなわち、減速時における単位時間当たりの推定エネルギー消費量を算出する実証式は、次の(4)式で表される。 The empirical formula for calculating the estimated energy consumption when the combined acceleration | α + g · sin θ | is positive, that is, the empirical formula for calculating the estimated energy consumption per unit time during acceleration and traveling is (3) It is expressed by a formula. The empirical formula for calculating the estimated energy consumption when the combined acceleration | α + g · sin θ | is negative, that is, the empirical formula for calculating the estimated energy consumption per unit time during deceleration is the following formula (4): It is represented by
上記(3)式および(4)式において、係数a1,a2は、車両状況などに応じて設定される常数である。係数k1,k2,k3は、加速時におけるエネルギー消費量に基づく変数である。また、速度Vとしており、その他の変数は、上記(1)式および(2)式と同様である。右辺第1項は、上記(1)式および(2)式の右辺第1項に相当する。 In the above formulas (3) and (4), the coefficients a 1 and a 2 are constants set according to the vehicle situation and the like. The coefficients k 1 , k 2 , and k 3 are variables based on energy consumption during acceleration. Further, the speed V is set, and other variables are the same as the above formulas (1) and (2). The first term on the right side corresponds to the first term on the right side of the above equations (1) and (2).
また、上記(3)式および(4)式において、右辺第2項は、上記(1)式および(2)式の、右辺第2項の勾配抵抗成分のエネルギーと、右辺第4項の加速度抵抗成分のエネルギーとに相当する。右辺第3項は、上記(1)式および(2)式の、右辺第2項の転がり抵抗成分のエネルギーと、右辺第3項の空気抵抗成分のエネルギーに相当する。(4)式の右辺第2項のβは、位置エネルギーと運動エネルギーの回収分(以下、「回収率」とする)である。 In the above formulas (3) and (4), the second term on the right side is the energy of the gradient resistance component in the second term on the right side and the acceleration in the fourth term on the right side in the formulas (1) and (2). It corresponds to the energy of the resistance component. The third term on the right side corresponds to the energy of the rolling resistance component in the second term on the right side and the energy of the air resistance component in the third term on the right side in the above equations (1) and (2). Β in the second term on the right side of the equation (4) is the amount of potential energy and kinetic energy recovered (hereinafter referred to as “recovery rate”).
また、ナビゲーション装置200は、上述したように車両がリンクを走行するのに要する旅行時間を算出し、車両がリンクを走行するときの平均速度および平均加速度を算出する。そして、ナビゲーション装置200は、リンクにおける車両の平均速度および平均加速度を用いて、次の(5)式または(6)式に示す消費エネルギー推定式に基づいて、車両がリンクを旅行時間で走行し終える際の推定エネルギー消費量を算出してもよい。
Further, the
上記(5)式に示す消費エネルギー推定式は、車両が走行するリンクの高度差Δhが正の場合の、リンクにおける推定エネルギー消費量を算出する理論式である。高度差Δhが正の場合とは、車両が上り坂を走行している場合である。上記(6)式に示す消費エネルギー推定式は、車両が走行するリンクの高度差Δhが負の場合の、リンクにおける推定エネルギー消費量を算出する理論式である。高度差Δhが負の場合とは、車両が下り坂を走行している場合である。高度差がない場合は、上記(5)式に示す消費エネルギー推定式を用いるのが好ましい。 The energy consumption estimation formula shown in the above formula (5) is a theoretical formula for calculating the estimated energy consumption amount in the link when the altitude difference Δh of the link on which the vehicle travels is positive. The case where the altitude difference Δh is positive is a case where the vehicle is traveling uphill. The consumption energy estimation formula shown in the above equation (6) is a theoretical formula for calculating the estimated energy consumption amount in the link when the altitude difference Δh of the link on which the vehicle travels is negative. The case where the altitude difference Δh is negative is a case where the vehicle is traveling downhill. When there is no difference in altitude, it is preferable to use the energy consumption estimation formula shown in the above formula (5).
上記(5)式および(6)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、加速抵抗によるエネルギー消費量(第二情報)である。右辺第3項は、位置エネルギーとして消費されるエネルギー消費量である(第四情報)。右辺第4項は、単位面積当たりに受ける空気抵抗および転がり抵抗(走行抵抗)によるエネルギー消費量(第三情報)である。 In the above formulas (5) and (6), the first term on the right side is the energy consumption (first information) during idling. The second term on the right side is the energy consumption (second information) by the acceleration resistance. The third term on the right side is energy consumption consumed as potential energy (fourth information). The fourth term on the right side is the energy consumption (third information) due to the air resistance and rolling resistance (running resistance) received per unit area.
ナビゲーション装置200は、道路勾配が明らかでない場合、上記(1)式〜(6)式に示す消費エネルギー推定式の道路勾配θ=0として車両の推定エネルギー消費量を算出してもよい。
When the road gradient is not clear, the
つぎに、上記(1)式〜(6)式で用いる回収率βについて説明する。上記(5)式において、右辺第2項をリンクにおける加速成分のエネルギー消費量Paccとすると、加速成分のエネルギー消費量Paccは、リンクにおける全エネルギー消費量(左辺)から、アイドリング時のエネルギー消費量(右辺第1項)と走行抵抗によるエネルギー消費量(右辺第4項)を減じたものであり、次の(7)式で表される。 Next, the recovery rate β used in the above equations (1) to (6) will be described. In the above equation (5), if the second term on the right side is the energy consumption Pacc of the acceleration component in the link, the energy consumption Pacc of the acceleration component is calculated from the total energy consumption (left side) of the link and the energy consumption during idling. (1st term on the right side) and energy consumption by the running resistance (4th term on the right side) are subtracted and expressed by the following equation (7).
なお、上記(7)式では、車両は道路勾配θの影響を受けていないこととする(θ=0)。すなわち、上記(5)式の右辺第3項をゼロとする。そして、上記(7)式を上記(5)式に代入することで、次の(8)式に示す回収率βの算出式を得ることができる。 In the above equation (7), it is assumed that the vehicle is not affected by the road gradient θ (θ = 0). That is, the third term on the right side of the above equation (5) is set to zero. Then, by substituting the above equation (7) into the above equation (5), the calculation formula for the recovery rate β shown in the following equation (8) can be obtained.
回収率βは、EV車では0.7〜0.9程度であり、HV車では0.6〜0.8程度であり、ガソリン車では0.2〜0.3程度である。なお、ガソリン車の回収率とは、加速時に要するエネルギーと減速時に回収するエネルギーとの割合である。 The recovery rate β is about 0.7 to 0.9 for EV vehicles, about 0.6 to 0.8 for HV vehicles, and about 0.2 to 0.3 for gasoline vehicles. The recovery rate of the gasoline vehicle is a ratio of energy required for acceleration and energy recovered for deceleration.
(ナビゲーション装置200における到達可能地点探索の概要)
本実施例のナビゲーション装置200は、自装置が搭載された車両の現在地点から到達可能な複数のノードを車両の到達可能地点として探索する。具体的には、ナビゲーション装置200は、上記(1)〜(6)式に示す消費エネルギー推定式のいずれか1つ以上を用いてリンクにおける推定エネルギー消費量を算出する。そして、ナビゲーション装置200は、リンクにおける推定エネルギー消費量の累計が最小となるように車両の到達可能なノードを探索し到達可能地点とする。以下に、ナビゲーション装置200による到達可能地点探索の一例について説明する。
(Outline of reachable point search in the navigation device 200)
The
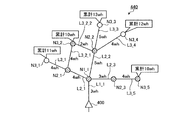
図4〜図7は、ナビゲーション装置200による到達可能地点探索の一例について模式的に示す説明図である。図4〜図7では、地図データのノード(例えば交差点)を丸印とし、隣り合うノードどうしを結ぶリンク(道路上の所定区間)を線分で示す(図8,図9についても同様にノードおよびリンクを図示)。
4-7 is explanatory drawing typically shown about an example of the reachable point search by the
図4に示すように、ナビゲーション装置200は、まず、車両の現在地点400から最も近いリンクL1_1を探索する。そして、ナビゲーション装置200は、リンクL1_1に接続するノードN1_1を探索し、到達可能地点を探索するためのノード候補(以下、単に「ノード候補」という)に追加する。
As shown in FIG. 4, the
つぎに、ナビゲーション装置200は、消費エネルギー推定式を用いて、車両の現在地点400とノード候補としたノードN1_1とを結ぶリンクL1_1における推定エネルギー消費量を算出する。そして、ナビゲーション装置200は、リンクL1_1における推定エネルギー消費量3whを、例えばノードN1_1に関連付けて記憶装置(磁気ディスク205や光ディスク207)に書き出す。
Next, the
つぎに、図5に示すように、ナビゲーション装置200は、ノードN1_1に接続するすべてのリンクL2_1,L2_2,L2_3を探索し、到達可能地点を探索するためのリンク候補(以下、単に「リンク候補」という)とする。つぎに、ナビゲーション装置200は、消費エネルギー推定式を用いて、リンクL2_1における推定エネルギー消費量を算出する。
Next, as shown in FIG. 5, the
そして、ナビゲーション装置200は、リンクL2_1における推定エネルギー消費量4whとリンクL1_1における推定エネルギー消費量3whとを累計した累計エネルギー量7whを、リンクL2_1に接続するノードN2_1に関連付けて記憶装置(磁気ディスク205や光ディスク207)に書き出す(以下、「累計エネルギー量をノードに設定」とする)。
The
さらに、ナビゲーション装置200は、リンクL2_1の場合と同様に、消費エネルギー推定式を用いて、リンクL2_2,L2_3における推定エネルギー消費量をそれぞれ算出する。そして、ナビゲーション装置200は、リンクL2_2における推定エネルギー消費量5whとリンクL1_1における推定エネルギー消費量3whとを累計した累計エネルギー量8whを、リンクL2_2に接続するノードN2_2に設定する。
Furthermore, the
また、ナビゲーション装置200は、リンクL2_3における推定エネルギー消費量3whとリンクL1_1における推定エネルギー消費量3whとを累計した累計エネルギー量6whを、リンクL2_3に接続するノードN2_3に設定する。このとき、ナビゲーション装置200は、累計エネルギー量を設定したノードがノード候補でない場合には、そのノードをノード候補に追加する。
In addition, the
つぎに、図6に示すように、ナビゲーション装置200は、ノードN2_1に接続するすべてのリンクL3_1,L3_2_1、ノードN2_2に接続するすべてのリンクL3_2_2,L3_3,L3_4、およびノードN2_3に接続するリンクL3_5を探索し、リンク候補とする。つぎに、ナビゲーション装置200は、消費エネルギー推定式を用いて、リンクL3_1〜リンクL3_5における推定エネルギー消費量を算出する。
Next, as illustrated in FIG. 6, the
そして、ナビゲーション装置200は、リンクL3_1における推定エネルギー消費量4whをノードN2_1に設定した累計エネルギー量7whに累計し、リンクL3_1に接続するノードN3_1に累計エネルギー量11whを設定する。また、ナビゲーション装置200は、リンクL3_3〜L3_5においてもリンクL3_1の場合と同様に、各リンクL3_3〜L3_5にそれぞれ接続するノードN3_3〜N3_5に累計エネルギー量13wh,12wh,10whを設定する。
Then, the
具体的には、ナビゲーション装置200は、リンクL3_3における推定エネルギー消費量5whをノードN2_2に設定した累計エネルギー量8whに累計し、ノードN3_3に累計エネルギー量13whを設定する。ナビゲーション装置200は、リンクL3_4における推定エネルギー消費量4whをノードN2_2に設定した累計エネルギー量8whに累計し、ノードN3_4に累計エネルギー量12whを設定する。ナビゲーション装置200は、リンクL3_5における推定エネルギー消費量4whをノードN2_3に設定した累計エネルギー量6whに累計し、ノードN3_5に累計エネルギー量10whを設定する。
Specifically, the
一方、ナビゲーション装置200は、ノードN3_2のように一のノードに複数のリンクL3_2_1,L3_2_2が接続する場合には、車両の現在地点400から一のノードN3_2までの複数の経路における累計エネルギー量のうち、最小の累計エネルギー量10whを当該一のノードN3_2に設定する。
On the other hand, when a plurality of links L3_2_1 and L3_2_2 are connected to one node like the node N3_2, the
具体的には、ナビゲーション装置200は、リンクL3_2_1における推定エネルギー消費量4whをノードN2_1に設定した累計エネルギー量7whに累計し(=累計エネルギー量11wh)、リンクL3_2_2における推定エネルギー消費量2whをノードN2_2に設定した累計エネルギー量8whに累計する(=累計エネルギー量10wh)。そして、ナビゲーション装置200は、車両の現在地点400からリンクL3_2_1までの経路の累計エネルギー量11whと、車両の現在地点400からリンクL3_2_2までの経路の累計エネルギー量10whとを比較し、最小の累計エネルギー量となるリンクL3_2_2側の経路の累計エネルギー量10whをノードN3_2に設定する。
Specifically, the
ナビゲーション装置200は、上述したノードN2_1〜N2_3のように車両の現在地点400から同一階層のノードが複数存在する場合、例えば、同一レベルのノードのうち、累計エネルギー量が少ないノードに接続するリンクから順に推定エネルギー消費量および累計エネルギー量を算出する。具体的には、ナビゲーション装置200は、ノードN2_3、ノードN2_1、ノードN2_2の順に、各ノードに接続するリンクにおける推定エネルギー消費量をそれぞれ算出し、各ノードにおける累計エネルギー量に累計する。このように、推定エネルギー消費量および累計エネルギー量を算出するノードの順番を特定することにより、残存エネルギー量で到達可能な範囲を効率的に算出することができる。
When there are a plurality of nodes of the same hierarchy from the
その後、ナビゲーション装置200は、ノードN3_1〜N3_5からさらに深い階層のノードへと、上述したような累計エネルギー量の累計を続けていく。そして、ナビゲーション装置200は、予め設定された指定エネルギー量以下の累計エネルギー量が設定されたすべてのノードを、車両の到達可能地点として抽出し、到達可能地点として抽出されたノードの経度緯度情報をそれぞれのノードに関連付けて記憶装置に書き出す。
After that, the
具体的には、例えば指定エネルギー量を10whとした場合、図7に斜線で塗りつぶされた丸印で示すように、ナビゲーション装置200は、10wh以下の累計エネルギー量が設定されたノードN1_1,N2_1,N2_2,N2_3,N3_2,N3_5を車両の到達可能地点として抽出する。予め設定された指定エネルギー量とは、例えば、車両の現在地点400での残存エネルギー量(初期保有エネルギー量)である。
Specifically, for example, when the designated energy amount is 10wh, the
<探索部303による探索例>
図7に示す車両の現在地点400と複数のノードおよびリンクとで構成された地図データ440は、到達可能地点探索を説明するための一例であり、ナビゲーション装置200は、実際には図8に示すように図7に示す地図データ700よりも広い範囲である車両の現在地点400の周辺800でさらに多くのノードおよびリンクを探索する。
<Search Example by
The
図8は、ナビゲーション装置200による到達可能地点探索の一例について示す説明図である。上述したようにすべての道路(細街路を除く)について累計エネルギー量を算出し続けていく場合、図8に示すように、各道路のすべてのノードにおける累計エネルギー量を漏れなく詳細に探索することができる。しかし、日本全国で約200万個のリンクにおける推定エネルギー消費量を算出し累計することとなり、ナビゲーション装置200の情報処理量が膨大となる。このため、ナビゲーション装置200は、例えばリンクの重要度などに基づいて、移動体の到達可能地点を探索する道路を絞り込んでもよい。
FIG. 8 is an explanatory diagram showing an example of reachable point search by the
図9は、ナビゲーション装置200による到達可能地点探索の別の一例について示す説明図である。具体的には、ナビゲーション装置200は、例えば、車両の現在地点400の周辺800ではすべての道路(細街路を除く)において累計エネルギー量を算出し、ある一定距離以上離れた範囲では重要度の高い道路のみで累計エネルギー量を算出する。これにより、図9に示すように、ナビゲーション装置200によって探索されるノード数およびリンク数を減少させることができ、ナビゲーション装置200の情報処理量を低減させることができる。したがって、ナビゲーション装置200の処理速度を向上することができる。
FIG. 9 is an explanatory diagram showing another example of the reachable point search by the
<分割部304による地図データの分割例>
本実施例のナビゲーション装置200は、上述したように探索された到達可能地点に基づいて、記憶装置に記憶された地図データを分割する。具体的には、ナビゲーション装置200は、ベクタデータで構成される地図データを、例えば64×64ドットのメッシュ(X,Y)に変換し、地図データをラスタデータ(画像データ)にする。
<Example of division of map data by
The
図10は、ナビゲーション装置200による到達可能地点を経度−緯度で示す一例の説明図である。また、図11は、ナビゲーション装置200による到達可能地点をメッシュで示す一例の説明図である。図10には、例えば図8,図9に示すように探索された到達可能地点の経度緯度情報(x,y)を絶対座標で図示している。図11には、到達可能地点に基づいて識別情報が付与された64×64ドットのメッシュ(X,Y)をスクリーン座標で図示している。
FIG. 10 is an explanatory diagram of an example showing a reachable point by the
図10に示すように、ナビゲーション装置200は、まず、複数の到達可能地点のそれぞれの経度x、緯度yに基づいて、絶対座標で点群1000を有する経度緯度情報(x,y)を生成する。経度緯度情報(x,y)の原点(0,0)は図10の左下である。そして、ナビゲーション装置200は、車両の現在地点400の経度ofxから経度x方向に最も離れた到達可能地点の最大経度x_max、最小経度x_minまで距離w1,w2を算出する。また、ナビゲーション装置200は、車両の現在地点400の緯度ofyから緯度y方向に最も離れた到達可能地点の最大緯度y_max、最小緯度y_minまで距離w3,w4を算出する。
As shown in FIG. 10, the
つぎに、ナビゲーション装置200は、車両の現在地点400からの距離w1〜w4のうち、最も距離のある、車両の現在地点400から最小経度x_minまでの距離w2(以下、w5=max(w1,w2,w3,w4)とする)のn分の1の長さがメッシュ(X,Y)の矩形状の一要素の1辺の長さとなるように、複数の到達可能地点を含む地図データを、例えばm×mドット(例えば64×64ドット)のメッシュ(X,Y)に変換する。
Next, the
具体的には、ナビゲーション装置200は、1メッシュと経度緯度の大きさとの比を倍率mag=w5/nとし、経度緯度情報(x,y)とメッシュ(X,Y)とが次の(9)式,(10)式を満たすように、経度緯度情報(x,y)をメッシュ(X,Y)に変換する。
Specifically, the
X=(x−ofx)/mag ・・・(9) X = (x−ofx) / mag (9)
Y=(y−ofy)/mag ・・・(10) Y = (y-ofy) / mag (10)
経度緯度情報(x,y)をメッシュ(X,Y)に変換することにより、図11に示すように、車両の現在地点400は、m×mドットのメッシュ(X,Y)で構成される矩形状の画像データの中心となり、車両の現在地点400のメッシュ(X,Y)はX軸方向、Y軸方向ともに等しく、X=Y=m/2=n+4となる。また、メッシュ(X,Y)の周辺の例えば4ドット分を空白にするためにn=(m/2)−4とする。そして、ナビゲーション装置200は、経度緯度情報(x,y)をメッシュ(X,Y)に変換するときに、メッシュ(X,Y)の各領域にそれぞれ識別情報を付与し、m行m列の2次元行列データ(Y,X)のメッシュに変換する。
By converting the longitude / latitude information (x, y) into a mesh (X, Y), as shown in FIG. 11, the
具体的には、ナビゲーション装置200は、メッシュ(X,Y)の一の領域に車両の到達可能地点が含まれる場合、当該一の領域に車両が到達可能であることを識別する到達可能の識別情報として、例えば「1」を付与する(図11では1ドットを例えば黒色で描画)。一方、ナビゲーション装置200は、メッシュ(X,Y)の一の領域に車両の到達可能地点が含まれない場合、当該の一の領域に車両が到達不可能であることを識別する到達不可能の識別情報として、例えば「0」を付与する(図11では1ドットを例えば白色で描画)。
Specifically, when the reachable point of the vehicle is included in one area of the mesh (X, Y), the
このように、ナビゲーション装置200は、地図データを分割した各領域にそれぞれ識別情報を付与したm行m列の2次元行列データ(Y,X)のメッシュに変換し、地図データを2値化されたラスタデータとして扱う。メッシュの各領域は、それぞれ一定範囲の矩形状の領域であらわされる。具体的には、図11に示すように、例えば、複数の到達可能地点の点群1100が黒色で描画されたm×mドットのメッシュ(X,Y)が生成される。メッシュ(X,Y)の原点(0,0)は左上である。
In this way, the
<付与部305による識別情報の付与例>
図12は、付与部305による識別情報の付与例1を示す説明図である。(A)は、探索フィルタFである。探索フィルタFは、例えば、m行m列(mは3以上の奇数)の正方行列となる2次元行列データである。探索フィルタFは、中心に位置する中心領域Cfとその上下4領域からなる5個の領域に、識別情報「1」を付与するフィルタである。識別情報「1」を付与するフィルタについては、図中塗りつぶしにより示している。
<An example of providing identification information by the assigning
FIG. 12 is an explanatory diagram of a first example of identification information given by the
(B)は、ある探索元領域M1とその探索先領域M2とを示している。探索元領域M1内には、探索元地点となるノードN1が存在し、探索先領域M2には探索先地点となるノードN2が存在する。また、ノードN1,N2間を結ぶリンクL12も存在する。(C)は、リンクL12が存在するメッシュに探索フィルタFの中心領域Cfを対応させて探索元領域M1から探索先領域M2に走査した状態を示す。これにより、探索元領域M1から探索先領域M2までの区間が幅を持った識別情報群により連結されることになる。探索元領域M1から探索先領域M2に走査する際に、リンクL12が通過する各画素を特定する手順には、ブレゼンハムの直線描画アルゴリズムを適用する。ブレゼンハムの直線描画アルゴリズムにおいて各画素を描画する代わりに、探索フィルタFによる画像処理を実行する。 (B) shows a certain search source area M1 and its search destination area M2. In the search source region M1, there is a node N1 that is a search source point, and in the search destination region M2, there is a node N2 that is a search destination point. There is also a link L12 connecting the nodes N1 and N2. (C) shows a state in which the center area Cf of the search filter F is associated with the mesh in which the link L12 is present and scanned from the search source area M1 to the search destination area M2. As a result, sections from the search source area M1 to the search destination area M2 are connected by the identification information group having a width. When scanning from the search source area M1 to the search destination area M2, the Bresenham straight line drawing algorithm is applied to the procedure for specifying each pixel through which the link L12 passes. Instead of drawing each pixel in Bresenham's straight line drawing algorithm, image processing by the search filter F is executed.
図13は、付与部305による識別情報の付与例2を示す説明図である。(A)は、重複領域となるメッシュのみに識別情報「1」を付与した状態を示す。(A)では、探索元領域および探索先領域にはまだ識別情報「1」は付与されていない。(B)は、(A)の次状態を示す。(B)では、探索元領域および探索先領域について、識別情報「1」が付与される。探索先領域は、次の探索元領域となるため、(A)⇒(B)の順序で識別情報を付与することにより、探索元領域と探索先領域との識別情報「1」の重複付与を防止することができ、処理の高速化を図ることができる。
FIG. 13 is an explanatory diagram illustrating a second example of identification information provision by the
<検出部307による方向検出例>
図14は、検出部307による方向検出例を示す説明図である。検出部307では、中心領域Cfからのリンクの方向を検出することにより、探索フィルタFの状態を変更して走査する。(A)〜(H)は、リンクの各方向に対応した変更後の探索フィルタFを示している。変更後は、中心領域Cfと検出方向の逆側の領域となる左上領域および左領域について、識別情報「1」が付与されなくなる。これにより、すでに識別情報「1」が付与されている領域への重複付与を防止して、探索フィルタFによる走査の高速化を図ることができる。
<Example of Direction Detection by
FIG. 14 is an explanatory diagram illustrating an example of direction detection by the
<表示制御部308による到達可能範囲の輪郭抽出例・その1>
ナビゲーション装置200は、m行m列の2次元行列データ(Y,X)のメッシュに付与された識別情報に基づいて、車両の到達可能範囲の輪郭を抽出する。具体的には、ナビゲーション装置200は、例えば、フリーマンのチェインコードを用いて車両の到達可能範囲の輪郭を抽出する。より具体的には、ナビゲーション装置200は、次のように車両の到達可能範囲の輪郭を抽出する。
<Example of contour extraction of reachable range by display control unit 308-
The
図15は、ナビゲーション装置による車両の到達可能範囲抽出の一例を模式的に示す説明図である。また、図16は、ナビゲーション装置による車両の到達可能範囲抽出後のメッシュの一例を模式的に示す説明図である。図15(A)には、領域1500に隣り合う領域1510〜1517の隣接方向を示す数字(以下、「方向指数(チェインコード)」という)と、方向指数に対応する8方向の矢印とを示す。図15(B)には、h行h列の2次元行列データ(Y,X)のメッシュ1520を一例として示す。また、図15(B)には、到達可能の識別情報が付与された領域1521〜1534および当該領域1521〜1534に囲まれた到達可能の識別情報が付与された領域をハッチングで図示する。
FIG. 15 is an explanatory diagram schematically illustrating an example of vehicle reachable range extraction by the navigation device. FIG. 16 is an explanatory diagram schematically illustrating an example of a mesh after the reachable range of the vehicle is extracted by the navigation device. FIG. 15A shows numbers indicating the adjacent directions of the
方向指数は、単位長さの線分の向いている方向を示す。メッシュ(X,Y)において、方向指数に対応する座標は、(X+dx,Y+dy)となる。具体的には、図15(A)に示すように、領域1500から左下に隣り合う領域1510へ向かう方向の方向指数は「0」である。領域1500から下に隣り合う領域1511へ向かう方向の方向指数は「1」である。領域1500から右下に隣り合う領域1512へ向かう方向の方向指数は「2」である。
The direction index indicates the direction in which the unit length line segment is facing. In the mesh (X, Y), the coordinates corresponding to the direction index are (X + dx, Y + dy). Specifically, as shown in FIG. 15A, the direction index in the direction from the
また、領域1500から右に隣り合う領域1513へ向かう方向の方向指数は「3」である。領域1500から右上に隣り合う領域1514へ向かう方向の方向指数は「4」である。領域1500から上に隣り合う領域1515へ向かう方向の方向指数は「5」である。領域1500から左上に隣り合う領域1516へ向かう方向の方向指数は「6」である。領域1500から左に隣り合う領域1517へ向かう方向の方向指数は「7」である。
The direction index in the direction from the
ナビゲーション装置200は、領域1500に隣り合う到達可能の識別情報「1」が付与された領域を左回りに検索する。また、ナビゲーション装置200は、領域1500に隣り合う到達可能の識別情報が付与された領域の検索開始点を、前回の方向指数に基づいて決定する。具体的には、ナビゲーション装置200は、他の領域から領域1500へ向かう方向指数が「0」であった場合、領域1500の左に隣り合う領域、すなわち方向指数「7」の方向に隣り合う領域1517から検索を開始する。
The
同様に、ナビゲーション装置200は、他の領域から領域1500へ向かう方向指数が「1」〜「7」であった場合、領域1500の左下、下、右下、右、右上、上、左上に隣り合う領域、すなわちそれぞれ方向指数「0」、「1」、「2」、「3」、「4」、「5」、「6」の方向に隣り合う領域1510〜1516から検索を開始する。そして、ナビゲーション装置200は、領域1500から各領域1510〜1517のいずれか一の領域から到達可能の識別情報「1」を検出した場合、到達可能の識別情報「1」を検出した領域1510〜1517に対応する方向指数「0」〜「7」を、領域1500に関連付けて記憶装置に書き込む。
Similarly, when the direction index from another region toward the
具体的には、ナビゲーション装置200は、次のように車両の到達可能範囲の輪郭を抽出する。図15(B)に示すように、ナビゲーション装置200は、まず、h行h列の2次元行列データ(Y,X)のメッシュ1520のa行a列の領域から行単位で到達可能の識別情報が付与された領域を検索する。
Specifically, the
メッシュ1520のa行目のすべての領域には到達不可能の識別情報が付与されているので、つぎに、ナビゲーション装置200は、メッシュ1120のb行a列の領域からb行h列の領域に向かって到達可能の識別情報を検索する。そして、ナビゲーション装置200は、メッシュ1520のb行e列の領域1521において到達可能の識別情報を検出した後、メッシュ1520のb行e列の領域1521から左回りに、車両の到達可能範囲の輪郭となる到達可能の識別情報を有する領域を検索する。
Since the unreachable identification information is given to all the areas in the a line of the
具体的には、ナビゲーション装置200は、領域1521の左に隣り合うb行d列の領域はすでに検索済みのため、まず、領域1521の左下に隣り合う領域1522から左回りに、到達可能の識別情報を有する領域があるか否かを検索する。そして、ナビゲーション装置200は、領域1522の到達可能の識別情報を検出し、領域1521から領域1522へ向かう方向の方向指数「0」を、領域1521に関連付けて記憶装置に記憶する。
Specifically, since the
つぎに、ナビゲーション装置200は、前回の方向指数「0」であるため、領域1522の左に隣り合うc行c列の領域から左回りに、到達可能の識別情報を有する領域があるか否かを検索する。そして、ナビゲーション装置200は、領域1522の左下に隣り合う領域1523の到達可能の識別情報を検出し、領域1522から領域1523へ向かう方向の方向指数「0」を、前回の方向指数に関連付けて記憶装置に記憶する。
Next, since the
以降、ナビゲーション装置200は、前回の方向指数に基づいて検索開始点を決定し、検索開始点から左回りに到達可能の識別情報を有する領域があるか否かを検索する処理を、方向指数に対応する矢印が領域1521に戻ってくるまで繰り返しおこなう。具体的には、ナビゲーション装置200は、領域1522の左に隣り合う領域から左回りに、到達可能の識別情報を有する領域があるか否かを検索し、領域1523の下に隣り合う領域1524の到達可能の識別情報を検出して、方向指数「1」を前回の方向指数に関連付けて記憶装置に記憶する。
Thereafter, the
同様に、ナビゲーション装置200は、前回の方向指数に基づいて検索開始点を決定した後、検索開始点から左回りに到達可能の識別情報を有する領域を検索し、到達可能の識別情報を有する領域1524〜1534を順次検出する。そして、ナビゲーション装置200は、方向指数を取得するごとに前回の方向指数に関連付けて記憶装置に記憶する。
Similarly, after determining the search start point based on the previous direction index, the
その後、ナビゲーション装置200は、領域1534の右上に隣り合うb行f列の領域から左回りに、到達可能の識別情報を有する領域があるか否かを検索し、領域1534の上に隣り合う領域1521の到達可能の識別情報を検出して、方向指数「5」を前回の方向指数に関連付けて記憶装置に記憶する。これにより、記憶装置には、方向指数「0」→「0」→「1」→「0」→「2」→「3」→「4」→「3」→「2」→「5」→「5」→「6」→「6」→「5」がこの順で記憶される。
After that, the
このようにナビゲーション装置200は、最初に検出した領域1521から、当該領域1521に隣り合う到達可能の識別情報を有する領域1522〜1534を左回りに順次検索し方向指数を取得する。そして、ナビゲーション装置200は、領域1521から方向指数に対応する方向の一の領域を塗りつぶすことで、図16に示すように、車両の到達可能範囲の輪郭1601および当該輪郭1601に囲まれた部分1602からなる車両の到達可能範囲1600を有するメッシュを生成する。
In this way, the
<表示制御部308による到達可能範囲の輪郭抽出例・その2>
表示制御部308による車両の到達可能範囲抽出の別の一例について説明する。ナビゲーション装置200は、例えば、到達可能の識別情報が付与された2次元行列データ(Y,X)のメッシュの経度緯度情報に基づいて、車両の到達可能範囲の輪郭を抽出してもよい。具体的には、ナビゲーション装置200は、次のように車両の到達可能範囲の輪郭を抽出する。
<Example of contour extraction of reachable range by
Another example of vehicle reachable range extraction by the
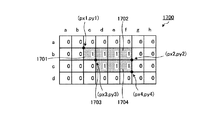
図17は、ナビゲーション装置による車両の到達可能範囲抽出の別の一例について模式的に示す説明図である。図17に示すようなd行h列の2次元行列データ(Y,X)のメッシュ1700を例に説明する。ナビゲーション装置200は、メッシュ1700の、到達可能の識別情報「1」が付与された領域を検索する。具体的には、ナビゲーション装置200は、まず、a行a列の領域からa行h列の領域に向かって到達可能の識別情報「1」を検索する。
FIG. 17 is an explanatory diagram schematically showing another example of vehicle reachable range extraction by the navigation device. A
メッシュ1700のa行目のすべての領域には到達不可能の識別情報「0」が付与されているので、つぎに、ナビゲーション装置200は、b行a列の領域からb行h列の領域に向かって到達可能の識別情報「1」を有する領域を検索する。そして、ナビゲーション装置200は、到達可能の識別情報「1」を有するb行c列の領域1701の最小経度px1、最小緯度py1(領域1701の左上座標)を取得する。
Since the unreachable identification information “0” is assigned to all the regions in the a-th row of the
つぎに、ナビゲーション装置200は、b行d列の領域からb行h列の領域に向かって到達可能の識別情報「1」を有する領域を検索する。そして、ナビゲーション装置200は、到達可能の識別情報「1」を有する領域と、到達不可の識別情報「0」を有する領域との境界を検索し、到達可能の識別情報「1」を有するb行f列の領域1702の最大経度px2、最大緯度py2(領域1702の右下座標)を取得する。
Next, the
つぎに、ナビゲーション装置200は、b行c列の領域1701の左上座標(px1,py1)と、b行f列の領域1702の右下座標(px2,py2)とを対向する頂点とする矩形領域を塗りつぶす。
Next, the
つぎに、ナビゲーション装置200は、メッシュ1700のb行g列からb行h列の領域へ、さらにc行a列からc行h列に向かって到達可能の識別情報「1」を検索する。そして、ナビゲーション装置200は、到達可能の識別情報「1」を有するc行d列の領域1703の最小経度px3、最小緯度py3(領域1703の左上座標)を取得する。
Next, the
つぎに、ナビゲーション装置200は、c行e列の領域からc行h列の領域に向かって到達可能の識別情報「1」を有する領域を検索する。そして、ナビゲーション装置200は、到達可能の識別情報「1」を有する領域と、到達不可の識別情報「0」を有する領域との境界を検索し、到達可能の識別情報「1」を有するc行f列の領域1704の最大経度px4、最大緯度py4(領域1704の右下座標)を取得する。
Next, the
つぎに、ナビゲーション装置200は、c行d列の領域1703の左上座標(px3,py3)と、c行f列の領域1704の右下座標(px4,py4)とを対向する頂点とする矩形領域を塗りつぶす。
Next, the
その後、ナビゲーション装置200は、c行g列の領域からc行h列の領域へ、さらにさらにd行a列からd行h列に向かって到達可能の識別情報「1」を有する領域を検索する。ナビゲーション装置200は、c行g列の領域からd行h列までのすべての領域には到達不可能の識別情報「0」が付与されているので、処理を終了する。
After that, the
このように、2次元行列データ(Y,X)のメッシュ1700の各行ごとに、到達可能の識別情報「1」を有する領域を塗りつぶすことにより、車両の到達可能範囲および車両の到達可能範囲の輪郭を取得することができる。
As described above, the region having the reachable identification information “1” is filled for each row of the
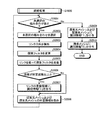
<ナビゲーション装置200における画像処理>
上述のように、ナビゲーション装置200は、車両の残存エネルギー量に基づいて探索された移動体の到達可能なノードに基づいて移動体の到達可能範囲を生成しディスプレイ213に表示させる。以下、例えば、ナビゲーション装置200がEV車に搭載されている場合を例に説明する。
<Image Processing in
As described above, the
図18は、ナビゲーション装置による画像処理の手順の一例を示すフローチャートである。図18のフローチャートにおいて、ナビゲーション装置200は、まず、例えば、通信I/F215を介して、自装置が搭載された車両の現在地点(ofx,ofy)を取得し(ステップS1801)、車両の現在地点(ofx,ofy)における車両の初期保有エネルギー量を取得する(ステップS1802)。
FIG. 18 is a flowchart illustrating an example of a procedure of image processing by the navigation device. In the flowchart of FIG. 18, the
つぎに、ナビゲーション装置200は、探索部303による探索処理(ステップS1803)、分割部304によるメッシュ生成処理(ステップS1804)を実行する。
Next, the
このあと、ナビゲーション装置200は、付与部305による連結処理(ステップS1805)および識別情報変更処理(ステップS1806)を実行する。そして、ナビゲーション装置200は、表示制御部308による表示部への表示処理を実行して(ステップS1807)、本フローチャートによる処理を終了する。
Thereafter, the
<ナビゲーション装置200における推定消費電力量算出処理>
つぎに、ナビゲーション装置200による推定消費電力量算出処理について説明する。図19は、ナビゲーション装置200による推定消費電力量算出処理の手順の一例を示すフローチャートである。図19に示すフローチャートでは、上述したステップS1803の到達可能ノード探索処理でおこなう処理である。ナビゲーション装置200は、まず、通信I/F215を介して、プルーブデータなどの渋滞情報や渋滞予測データを取得する(ステップS1901)。つぎに、ナビゲーション装置200は、リンクの長さや、リンクの道路種別を取得する(ステップS1902)。
<Estimated Power Consumption Calculation Processing in
Next, the estimated power consumption calculation process by the
つぎに、ナビゲーション装置200は、ステップS1901,S1902で取得した情報に基づいて、リンクの旅行時間を算出する(ステップS1903)。リンクの旅行時間とは、車両がリンクを走行し終わるのに要する時間である。つぎに、ナビゲーション装置200は、ステップS1901〜S1903で取得した情報に基づいて、リンクの平均速度を算出する(ステップS1904)。リンクの平均速度とは、車両がリンクを走行する際の平均速度である。
Next, the
つぎに、ナビゲーション装置200は、リンクの標高データを取得する(ステップS1905)。つぎに、ナビゲーション装置200は、車両の設定情報を取得する(ステップS1906)。つぎに、ナビゲーション装置200は、ステップS1901〜S1906で取得した情報に基づいて、上述した(1)式〜(6)式のいずれか1つ以上の消費エネルギー推定式を用いて、リンクにおける推定消費電力量を算出し(ステップS1907)、本フローチャートによる処理を終了する。
Next, the
<探索処理>
図20および図21は、ナビゲーション装置による到達可能地点探索処理の手順を示すフローチャートである。ナビゲーション装置200は、探索始点に最も近いリンクL(i)_jに接続するノードN(i)_jをノード候補に追加する(ステップS2001)。探索始点とは、上述したステップS1801で取得した車両の現在地点(ofx,ofy)である。
<Search process>
20 and 21 are flowcharts showing the procedure of reachable point search processing by the navigation device. The
変数i,jは、任意の数値であり、例えば、探索始点に最も近いリンクおよびノードをそれぞれリンクL(1)_jおよびノードN(1)_jとし、さらに、ノードN(1)_jに接続するリンクをリンクL(2)_j、リンクL(2)_jに接続するノードをノードN(2)_jとしていけばよい(j=1,2、・・・,j1)。変数j1は、任意の数値であり、同一の階層に複数のリンクまたはノードが存在することを意味する。 The variables i and j are arbitrary numerical values. For example, a link and a node closest to the search start point are a link L (1) _j and a node N (1) _j, respectively, and are further connected to the node N (1) _j. A node connecting the link to the link L (2) _j and the node connecting to the link L (2) _j may be a node N (2) _j (j = 1, 2,..., J1). The variable j1 is an arbitrary numerical value and means that a plurality of links or nodes exist in the same hierarchy.
つぎに、ナビゲーション装置200は、ノード候補が1つ以上あるか否かを判断する(ステップS2002)。ノード候補が1つ以上ある場合(ステップS2002:Yes)、ナビゲーション装置200は、車両の現在地点からノード候補までの累計消費電力量が最小なノード候補を選択する(ステップS2003)。例えば、ナビゲーション装置200がノード候補としてノードN(i)_jを選択したとして以降の処理を説明する。
Next, the
つぎに、ナビゲーション装置200は、車両の現在地点からノードN(i)_jまでの累計消費電力量が指定エネルギー量より小さいか否かを判断する(ステップS2004)。指定エネルギー量とは、例えば、車両の現在地点における車両の残存エネルギー量である。指定エネルギー量より小さい場合(ステップS2004:Yes)、ナビゲーション装置200は、ノードN(i)_jに接続するすべてのリンクL(i+1)_jを抽出する(ステップS2005)。
Next, the
つぎに、ナビゲーション装置200は、ステップS2005において抽出したリンクL(i+1)_jのうち、一のリンクL(i+1)_jを選択する(ステップS2006)。つぎに、ナビゲーション装置200は、ステップS2006において選択した一のリンクL(i+1)_jをリンク候補とするか否かを判断する候補判断処理をおこなう(ステップS2007,S2008)。
Next, the
一のリンクL(i+1)_jをリンク候補とする場合(ステップS2008:Yes)、ナビゲーション装置200は、一のリンクL(i+1)_jでの消費電力量算出処理をおこなう(ステップS2009)。つぎに、ナビゲーション装置200は、一のリンクL(i+1)_jに接続するノードN(i+1)_jまでの累計消費電力量W(i+1)_jを算出する(ステップS2010)。つぎに、ナビゲーション装置200は、ノードN(i+1)_jに接続する処理済みの他の経路があるか否かを判断する(ステップS2011)。
When one link L (i + 1) _j is set as a link candidate (step S2008: Yes), the
処理済みの他の経路がある場合(ステップS2011:Yes)、ナビゲーション装置200は、車両の現在地点からノードN(i+1)_jまでの累計消費電力量W(i+1)_jが他の経路での累計消費電力量よりも小さいか否かを判断する(ステップS2012)。他の経路での累計消費電力量よりも小さい場合(ステップS2012:Yes)、ナビゲーション装置200は、ノードN(i+1)_jに車両の現在地点からノードN(i+1)_jまでの累計消費電力量W(i+1)_jを設定する(ステップS2013)。
When there is another route that has been processed (step S2011: Yes), the
一方、処理済みの他の経路がない場合(ステップS2011:No)、ナビゲーション装置200は、ステップS2013に進む。つぎに、ナビゲーション装置200は、ノードN(i+1)_jがノード候補であるか否かを判断する(ステップS2014)。ノード候補でない場合(ステップS2014:No)、ナビゲーション装置200は、ノードN(i+1)_jをノード候補に追加する(ステップS2015)。
On the other hand, when there is no other processed route (step S2011: No), the
また、一のリンクL(i+1)_jをリンク候補としない場合(ステップS2008:No)、車両の現在地点からノードN(i+1)_jまでの累計消費電力量W(i+1)_jが他の経路での累計消費電力量以上である場合(ステップS2012:No)、ノードN(i+1)_jがノード候補である場合(ステップS2014:Yes)、ナビゲーション装置200は、ステップS2016へ進む。
When one link L (i + 1) _j is not a link candidate (step S2008: No), the accumulated power consumption W (i + 1) _j from the current point of the vehicle to the node N (i + 1) _j is another route. If the node N (i + 1) _j is a node candidate (step S2014: Yes), the
つぎに、ナビゲーション装置200は、すべてのリンクL(i+1)_jの候補判断処理が終了したか否かを判断する(ステップS2016)。すべてのリンクL(i+1)_jの候補判断処理が終了した場合(ステップS2016:Yes)、ノードN(i)_jをノード候補から外した後(ステップS2017)、ステップS2002へ戻る。そして、ナビゲーション装置200は、ノード候補が1つ以上ある場合(ステップS2002:Yes)、ノード候補の中から、車両の現在地点からの累計消費電力量が最小なノード候補を選択し(ステップS2003)、ステップS2003において選択したノード候補を次のノードN(i)_jとしてステップS2004以降の処理をおこなう。
Next, the
一方、すべてのリンクL(i+1)_jの候補判断処理が終了していない場合(ステップS2016:No)、ステップS2006へ戻る。そして、ナビゲーション装置200は、再度、ノードN(i)_jに接続する他のリンクL(i+1)_jを選択し、同一のノード候補に接続するすべてのリンクL(i+1)_jの候補判断処理が終了するまで(ステップS2016:Yes)、ステップS2007からステップS2015までの処理を繰り返しおこなう。
On the other hand, when the candidate determination process for all links L (i + 1) _j is not completed (step S2016: No), the process returns to step S2006. The
また、ノード候補が1つ以上ない場合(ステップS2002:No)、車両の現在地点からノードN(i)_jまでの累計消費電力量が指定エネルギー量以上である場合(ステップS2004:No)、ナビゲーション装置200は、本フローチャートによる処理を終了する。なお、探索処理では、探索されたリンクを接続する両端のノードの組み合わせが記憶部に保存される。リンクの一端が探索始点の場合も同様に、記憶部に保存される。すなわち、探索元地点と探索先地点との組み合わせが記憶部に保存される。
If there is no more than one node candidate (step S2002: No), if the cumulative power consumption from the current point of the vehicle to the node N (i) _j is greater than or equal to the specified energy amount (step S2004: No), navigation The
<リンク候補判断処理>
図22は、図20に示したリンク候補判断処理(ステップS2007)の手順の一例を示すフローチャートである。図22において、ナビゲーション装置200は、まず、ステップS2006において選択した一のリンクL(i+1)_jが通行禁止であるか否かを判断する(ステップS2201)。通行禁止でない場合(ステップS2201:No)、ナビゲーション装置200は、一のリンクL(i+1)_jが一方通行の逆走であるか否かを判断する(ステップS2202)。一方通行の逆走でない場合(ステップS2202:No)、ナビゲーション装置200は、一のリンクL(i+1)_jが時間規制や季節規制されているか否かを判断する(ステップS2203)。
<Link candidate determination process>
FIG. 22 is a flowchart illustrating an example of the procedure of the link candidate determination process (step S2007) illustrated in FIG. In FIG. 22, the
時間規制や季節規制されていない場合(ステップS2203:No)、ナビゲーション装置200は、一のリンクL(i+1)_jが一のリンクL(i+1)_jの車両の現在地点側のノードN(i+1)に接続するリンクL(i)_jよりも重要度が低いか否かを判断する(ステップS2204)。リンクL(i)_jよりも重要度が高い場合(ステップS2204:No)、ナビゲーション装置200は、一のリンクL(i+1)_jをリンク候補に決定し(ステップS2205)、本フローチャートによる処理を終了する。
When time regulation and season regulation are not carried out (step S2203: No), the
一方、通行禁止である場合(ステップS2201:Yes)、一方通行の逆走である場合(ステップS2202:Yes)、時間規制や季節規制されている場合(ステップS2203:Yes)、接続するリンクL(i)_jよりも重要度が低い場合(ステップS2204:Yes)、ナビゲーション装置200は、本フローチャートによる処理を終了する。
On the other hand, when it is prohibited to pass (step S2201: Yes), when it is one-way reverse running (step S2202: Yes), when time regulation or season regulation (step S2203: Yes), the link L ( i) When the importance is lower than _j (step S2204: Yes), the
<メッシュ生成処理>
図23は、図18に示したメッシュ生成処理(ステップS1804)の手順の一例を示すフローチャートである。図23において、ナビゲーション装置200は、まず、到達可能なノード(探索可能地点)の経度緯度情報(x,y)を取得する(ステップS2301)。つぎに、ナビゲーション装置200は、最大経度x_max、最小経度x_min、最大緯度y_max、最小緯度y_minを取得する(ステップS2302)。
<Mesh generation process>
FIG. 23 is a flowchart illustrating an example of the procedure of the mesh generation process (step S1804) illustrated in FIG. In FIG. 23, the
つぎに、ナビゲーション装置200は、ステップS1801で取得した車両の現在地点(ofx,ofy)から、最大経度x_maxまでの距離w1、最小経度x_minまでの距離w2、最大緯度y_maxまでの距離w3、最小緯度y_minまでの距離w4をそれぞれ算出する(ステップS2303)。つぎに、ナビゲーション装置200は、距離w1〜w4のうちの最も長い距離w5=max(w1,w2,w3,w4)を取得する(ステップS2304)。
Next, the
つぎに、ナビゲーション装置200は、記憶装置に記憶された地図データを絶対座標系からスクリーン座標系へ変換するための倍率mag=w5/nを算出する(ステップS2305)。つぎに、ナビゲーション装置200は、ステップS2305において算出した倍率magを用いて地図データを絶対座標系からスクリーン座標系へ変換し、m×mドットのメッシュ(X,Y)を生成し(ステップS2306)、本フローチャートによる処理を終了する。
Next, the
<連結処理>
図24は、図18に示した連結処理(ステップS1805)の手順の一例を示すフローチャートである。図24において、ナビゲーション装置200は、探索処理により記憶部に保存されている探索元地点と探索先地点との組み合わせ群に、未選択の組み合わせがあるか否かを判断する(ステップS2401)。未選択の組み合わせがある場合(ステップS2401:Yes)、ナビゲーション装置200は、未選択の組み合わせを1つ選択する(ステップS2402)。
<Consolidation process>
FIG. 24 is a flowchart illustrating an example of the procedure of the connection process (step S1805) illustrated in FIG. In FIG. 24, the
つぎに、ナビゲーション装置200は、検出部307により、選択した組み合わせについてリンクを特定し、そのリンク方向を検出する(ステップS2403)。そして、ナビゲーション装置200は、検出されたリンク方向により、図14に示したように探索フィルタFの変更をおこなう(ステップS2404)。なお、ステップS2403、S2404は、任意処理であるため、省略してもよい。
Next, the
そして、ナビゲーション装置200は、探索元地点を含む探索元領域を設定して、図12に示したように、リンクを辿って探索フィルタFを走査する(ステップS2405)。これにより、探索先領域が特定される。そして、ナビゲーション装置200は、判定部306により、探索元領域と探索先領域との間の距離が、所定距離以上であるか否かを判定する(ステップS2406)。
Then, the
所定距離以上である場合(ステップS2406:Yes)、ナビゲーション装置200は、探索元領域、探索先領域、およびリンクとの重複領域に、識別情報「1」を付して(ステップS2407)、ステップS2401に戻る。一方、所定距離以上でない場合(ステップS2406:No)、ナビゲーション装置200は、リンクとの重複領域が存在しないため、探索元領域および探索先領域に、識別情報「1」を付して(ステップS2408)、ステップS2401に戻る。ステップS2401において、未選択の組み合わせがない場合(ステップS2401:No)、ナビゲーション装置200は、識別情報「1」が付与されていない残余メッシュに識別情報「0」を付与して(ステップS2409)、本フローチャートによる処理を終了する。
If the distance is equal to or greater than the predetermined distance (step S2406: YES), the
<識別情報変更処理>
図25は、図18に示した識別情報変更処理(ステップS1806)の手順の一例を示すフローチャートである。図25のフローチャートでは、ナビゲーション装置200は、橋またはトンネルの入口および出口に相当する各領域の識別情報が到達可能の識別情報である場合に、橋またはトンネルに相当する領域に生じている欠損点を除去する。
<Identification information change process>
FIG. 25 is a flowchart illustrating an example of the procedure of the identification information change process (step S1806) illustrated in FIG. In the flowchart of FIG. 25, the
図25において、ナビゲーション装置200は、まず、my行mx列の2次元行列データのメッシュを取得する(ステップS2501)。つぎに、ナビゲーション装置200は、メッシュのi行j列の領域の識別情報を検索するために、変数i,jに1を代入する(ステップS2502,S2503)。つぎに、ナビゲーション装置200は、メッシュのi行j列の領域が橋またはトンネルの出入り口であるか否かを判断する(ステップS2504)。
In FIG. 25, the
i行j列の領域が橋またはトンネルの出入り口である場合(ステップS2504:Yes)、ナビゲーション装置200は、メッシュのi行j列の領域の識別情報が「1」であるか否かを判断する(ステップS2505)。i行j列の領域の識別情報が「1」である場合(ステップS2505:Yes)、ナビゲーション装置200は、メッシュのi行j列の領域に対応する、橋またはトンネルの他方の出入り口の領域の位置情報(i1,j1)と識別情報を取得する(ステップS2506)。
If the i-th row and j-th column region is the entrance of a bridge or tunnel (step S2504: Yes), the
つぎに、ナビゲーション装置200は、メッシュのi1行j1列の領域の識別情報が「1」であるか否かを判断する(ステップS2507)。i1行j1列の領域の識別情報が「1」である場合(ステップS2507:Yes)、ナビゲーション装置200は、i行j列の領域とi1行j1列の領域とを結ぶ区間上にあるすべての領域の位置情報を取得する(ステップS2508)。
Next, the
つぎに、ナビゲーション装置200は、ステップS2508において取得した各領域の識別情報を「1」に変更する(ステップS2509)。これにより、i行j列の領域とi1行j1列の領域とを結ぶ橋またはトンネルに相当する領域に生じている欠損点が除去される。ナビゲーション装置200は、ステップS2508において取得した各領域の識別情報がすべて「1」であった場合に、ステップS2509の処理をおこなわずにステップS2510へ進んでもよい。
Next, the
また、i行j列の領域が橋またはトンネルの出入り口でない場合(ステップS2504:No)、i行j列の領域の識別情報が「1」でない場合(ステップS2505:No)、および、i1行j1列の領域の識別情報が「1」でない場合(ステップS2507:No)、ナビゲーション装置200は、ステップS2510に進む。
Further, when the region of i row and j column is not the entrance of the bridge or tunnel (step S2504: No), when the identification information of the region of i row and j column is not “1” (step S2505: No), and i1 row j1 If the identification information of the row area is not “1” (step S2507: NO), the
つぎに、ナビゲーション装置200は、変数jに1を加算し(ステップS2510)、変数jがmx列を超えているか否かを判断する(ステップS2511)。変数jがmx列を超えていない場合(ステップS2511:No)、ナビゲーション装置200は、ステップS2504に戻り、以降の処理を繰り返しおこなう。一方、変数jがmx列を超えている場合(ステップS2511:Yes)、ナビゲーション装置200は、変数iに1を加算し(ステップS2512)、変数iがmy行を超えているか否かを判断する(ステップS2513)。
Next, the
変数iがmy行を超えていない場合(ステップS2513:No)、ナビゲーション装置200は、ステップS2503に戻り、変数jに1を代入した後、以降の処理を繰り返しおこなう。一方、変数iがmy行を超えている場合(ステップS2513:Yes)、ナビゲーション装置200は、本フローチャートによる処理を終了する。これにより、ナビゲーション装置200は、my行mx列の2次元行列データのメッシュに含まれる橋またはトンネル上のすべての欠損点を除去することができる。
If the variable i does not exceed the my line (step S2513: NO), the
また、ナビゲーション装置200は、ステップS2506において橋またはトンネルの他方の出入り口として取得されたi1行j1列の領域について、再度、橋またはトンネルの他方の出入り口であるか否かの判断(ステップS2504の処理)をおこなわなくてもよい。これにより、ナビゲーション装置200は、識別情報変更処理の処理量を低減させることができる。
In addition, the
<表示処理>
図26および図27は、図18に示した表示処理(ステップS1807)の手順の一例を示すフローチャートである。図26および図27において、ナビゲーション装置200は、まず、my行mx列の2次元行列データのメッシュを取得する(ステップS2601)。つぎに、ナビゲーション装置200は、ステップS2601で取得したメッシュの各領域の経度緯度情報を取得する(ステップS2602)。
<Display processing>
26 and 27 are flowcharts showing an example of the procedure of the display process (step S1807) shown in FIG. 26 and 27, the
つぎに、ナビゲーション装置200は、メッシュのi行j列の領域の識別情報を検索するために、変数iを初期化し、変数iに1を加算する(ステップS2603,S2604)。つぎに、ナビゲーション装置200は、変数iがmy行を超えているか否かを判断する(ステップS2605)。
Next, the
変数iがmy行を超えていない場合(ステップS2605:No)、ナビゲーション装置200は、変数jを初期化し、変数jに1を加算する(ステップS2606,S2607)。つぎに、ナビゲーション装置200は、変数jがmx列を超えているか否かを判断する(ステップS2608)。
When the variable i does not exceed the my line (step S2605: No), the
変数jがmx列を超えていない場合(ステップS2608:No)、ナビゲーション装置200は、メッシュのi行j列の領域の識別情報が「1」であるか否かを判断する(ステップS2609)。i行j列の領域の識別情報が「1」である場合(ステップS2609:Yes)、ナビゲーション装置200は、メッシュのi行j列の領域の左上座標(px1,py1)を取得する(ステップS2610)。i行j列の領域の左上座標(px1,py1)とは、i行j列の領域の最小経度px1、最小緯度py1である。
When the variable j does not exceed the mx column (step S2608: No), the
つぎに、ナビゲーション装置200は、変数jがmx列を超えていないか否かを判断する(ステップS2611)。変数jがmx列を超えている場合(ステップS2611:No)、ナビゲーション装置200は、メッシュのi行j列の領域の右下座標(px2,py2)を取得する(ステップS2612)。i行j列の領域の右下座標(px2,py2)とは、i行j列の領域の最大経度px2、最大緯度py2である。
Next, the
つぎに、ナビゲーション装置200は、ステップS2610において取得した左上座標(px1,py1)と、ステップS2612において取得した右下座標(px2,py2)とを地図データに設定する(ステップS2616)。そして、ナビゲーション装置200は、左上座標(px1,py1)と、右下座標(px2,py2)とを対向する頂点とする矩形領域を塗りつぶし(ステップS2617)、ステップS2604に戻り、以降の処理を繰り返しおこなう。
Next, the
一方、変数jがmx列を超えていない場合(ステップS2611:Yes)、ナビゲーション装置200は、変数jに1を加算し(ステップS2613)、メッシュのi行j列の領域の識別情報が「1」であるか否かを判断する(ステップS2614)。i行j列の領域の識別情報が「1」でない場合(ステップS2614:No)、ナビゲーション装置200は、メッシュのi行j−1列の領域の右下座標(px2,py2)を取得し(ステップS2615)、ステップS2616以降の処理をおこなう。
On the other hand, when the variable j does not exceed the mx column (step S2611: Yes), the
また、i行j列の領域の識別情報が「1」である場合(ステップS2614:Yes)、ステップS2611に戻り、以降の処理を繰り返しおこなう。そして、変数iがmy行を超えている場合(ステップS2605:Yes)、ナビゲーション装置200は、本フローチャートによる処理を終了する。変数jがmx列を超えている場合(ステップS2608:Yes)、ステップS2604に戻り、以降の処理を繰り返しおこなう。
If the identification information of the i-th row and j-th column region is “1” (step S2614: YES), the process returns to step S2611, and the subsequent processing is repeated. If the variable i exceeds the my line (step S2605: Yes), the
<連結処理の他の例>
連結処理の他の例について説明する。連結処理の他の例とは、図13に示したように、探索元領域および探索先領域に対し、最後に識別情報「1」を付与する処理例である。
<Other examples of consolidation processing>
Another example of the connection process will be described. Another example of the connection process is a process example in which identification information “1” is finally given to the search source area and the search destination area, as illustrated in FIG. 13.
図28は、図18に示した連結処理(ステップS1805)の手順の他の例を示すフローチャートである。図28において、ナビゲーション装置200は、探索処理により記憶部に保存されている探索元地点と探索先地点との組み合わせ群に、未選択の組み合わせがあるか否かを判断する(ステップS2801)。未選択の組み合わせがある場合(ステップS2801:Yes)、ナビゲーション装置200は、未選択の組み合わせを1つ選択する(ステップS2802)。
FIG. 28 is a flowchart illustrating another example of the procedure of the connection process (step S1805) illustrated in FIG. In FIG. 28, the
つぎに、ナビゲーション装置200は、検出部307により、選択した組み合わせについてリンクを特定し、そのリンク方向を検出する(ステップS2803)。そして、ナビゲーション装置200は、検出されたリンク方向により、図14に示したように探索フィルタFの変更をおこなう(ステップS2804)。なお、ステップS2803、S2804は、任意処理であるため、省略してもよい。
Next, the
そして、ナビゲーション装置200は、探索元地点を含む探索元領域を設定して、図12に示したように、リンクを辿って探索フィルタFを走査する(ステップS2805)。これにより、探索先領域が特定される。そして、ナビゲーション装置200は、判定部306により、探索元領域と探索先領域との間の距離が、所定距離以上であるか否かを判定する(ステップS2806)。
Then, the
所定距離以上である場合(ステップS2806:Yes)、ナビゲーション装置200は、リンクとの重複領域に、識別情報「1」を付して(ステップS2807)、ステップS2808に移行する。一方、所定距離以上でない場合(ステップS2806:No)、ナビゲーション装置200は、リンクとの重複領域が存在しないため、ステップS2808に移行する。
If the distance is equal to or greater than the predetermined distance (step S2806: YES), the
そして、ステップS2808において、ナビゲーション装置200は、探索元領域および探索先領域の位置情報を保存して(ステップS2808)、ステップS2801に戻る。ステップS2801において、未選択の組み合わせがない場合(ステップS2801:No)、ナビゲーション装置200は、位置情報を保存した探索元領域および探索先領域に識別情報「1」を付与し(ステップS2809)、識別情報「1」が付与されていない残余メッシュに識別情報「0」を付与して(ステップS2810)、本フローチャートによる処理を終了する。
In step S2808,
<道路勾配について>
つぎに、上記(1)式〜(6)式の右辺に変数として用いられる道路勾配θについて説明する。図29は、勾配がある道路を走行する車両にかかる加速度の一例を模式的に示した説明図である。図29に示すように、道路勾配がθの坂道を走行する車両には、車両の走行に伴う加速度A(=dx/dt)と、重力加速度gの進行方向成分B(=g・sinθ)がかかる。例えば、上記(1)式を例に説明すると、上記(1)式の右辺第2項は、この車両の走行に伴う加速度Aと、重力加速度gの進行方向成分Bの合成加速度Cを示している。また、車両が走行する区間の距離Dとし、走行時間Tとし、走行速度Vとする。
<About road gradient>
Next, the road gradient θ used as a variable on the right side of the equations (1) to (6) will be described. FIG. 29 is an explanatory diagram schematically illustrating an example of acceleration applied to a vehicle traveling on a road having a gradient. As shown in FIG. 29, a vehicle traveling on a slope having a road gradient θ has acceleration A (= dx / dt) accompanying traveling of the vehicle and a traveling direction component B (= g · sin θ) of gravitational acceleration g. Take it. For example, taking the above equation (1) as an example, the second term on the right side of the above equation (1) shows the acceleration A accompanying the traveling of the vehicle and the resultant acceleration C of the traveling direction component B of the gravitational acceleration g. Yes. Further, the distance D of the section in which the vehicle travels is defined as the travel time T and the travel speed V.
道路勾配θを考慮せずに電力消費量の推定を行った場合、道路勾配θが小さい領域では推定消費電力量と実際の消費電力量との誤差が小さいが、道路勾配θが大きい領域では推定した推定消費電力量と実際の消費電力量との誤差が大きくなってしまう。このため、ナビゲーション装置200では、道路勾配、すなわち第四情報を考慮して燃費の推定をおこなうことで推定精度が向上する。
When the power consumption is estimated without considering the road gradient θ, the error between the estimated power consumption and the actual power consumption is small in the region where the road gradient θ is small, but is estimated in the region where the road gradient θ is large. An error between the estimated power consumption and the actual power consumption increases. For this reason, in the
車両が走行する道路の勾配は、例えば、ナビゲーション装置200に搭載された傾斜計を用いて知ることができる。また、ナビゲーション装置200に傾斜計が搭載されていない場合は、例えば、地図データに含まれる道路の勾配情報を用いることができる。
The gradient of the road on which the vehicle travels can be known using, for example, an inclinometer mounted on the
<走行抵抗について>
つぎに、車両に生じる走行抵抗について説明する。ナビゲーション装置200は、例えば、次の(11)式により走行抵抗を算出する。一般的に、走行抵抗は、道路種別や、道路勾配、路面状況などにより、加速時や走行時に移動体に生じる。
<About running resistance>
Next, traveling resistance generated in the vehicle will be described. For example, the
(実施の形態2)
実施の形態2は、実施の形態1と同様に探索結果から連結処理を実行するとともに、探索結果について膨張収縮処理を施す。そして、両方の処理結果の論理積をとることにより、識別情報「1」が付与されたメッシュを得る。移動体の到達可能範囲を、欠損点を発生することなく表現することができる。なお、実施の形態2では、実施の形態1との相違点のみ説明し、実施の形態1との共通点については説明を省略する。
(Embodiment 2)
In the second embodiment, similarly to the first embodiment, a connection process is executed from a search result, and an expansion / contraction process is performed on the search result. Then, by obtaining a logical product of both processing results, a mesh with identification information “1” is obtained. The reachable range of the moving object can be expressed without generating a missing point. In the second embodiment, only differences from the first embodiment will be described, and description of points common to the first embodiment will be omitted.
図30は、実施の形態2にかかる画像処理装置300および画像処理方法による画像処理例を示す説明図である。(A)は、探索後の状態を示している。(A)では、探索元地点(矢印の始端に対応)が存在するメッシュと探索先地点(矢印の終端に対応)が存在するメッシュが便宜上塗りつぶされているが、実際にはまだプロットされていないものとする。また、探索元地点が存在するメッシュを探索元領域、探索先地点が存在するメッシュを探索先領域と称す。
FIG. 30 is an explanatory diagram of an example of image processing by the
(B)は、(A)の次状態の1つであり、(A)の探索結果について膨張収縮処理を実行した実行結果を示している。(B)では、膨張収縮処理の結果に対応するメッシュが到達可能な領域として塗りつぶされる。 (B) is one of the next states of (A), and shows the execution result of executing the expansion / contraction process for the search result of (A). In (B), the mesh corresponding to the result of the expansion / contraction process is painted as an reachable area.
(C)は、(A)の次状態の1つを示している。(C)では、探索元領域と探索先領域との間のメッシュであって、探索されたリンクが存在するメッシュが塗りつぶされている。探索元領域と探索先領域との間のメッシュ(探索元領域と探索先領域を除く)であって、探索されたリンクが存在するメッシュを、重複領域と称す。(C)では、重複領域が到達可能な領域として塗りつぶされる。 (C) shows one of the following states of (A). In (C), the mesh between the search source region and the search destination region and filled with the searched link is filled. A mesh between the search source region and the search destination region (excluding the search source region and the search destination region) in which the searched link exists is referred to as an overlapping region. In (C), the overlapping area is filled as an reachable area.
(D)は、(C)の次状態を示している。(D)では、(C)について膨張収縮処理を実行した実行結果を示している。(D)の膨張収縮処理は省略してもよい。(E)は、(B)の膨張収縮結果および(D)の膨張収縮結果の論理積を示している。このように、実施の形態1による画像処理に、膨張収縮処理の結果を合成することにより、移動体の到達可能範囲を、欠損点を発生することなく表現することができる。 (D) shows the next state of (C). (D) shows the result of executing the expansion / contraction process for (C). The expansion / contraction process (D) may be omitted. (E) shows the logical product of the expansion / contraction result of (B) and the expansion / contraction result of (D). In this way, by combining the result of the expansion / contraction process with the image processing according to the first embodiment, the reachable range of the moving object can be expressed without generating a missing point.
<膨張収縮処理の一例>
図31は、ナビゲーション装置によるクロージング処理の一例を示す説明図である。図31(A)〜図31(C)は、各領域にそれぞれ識別情報が付与されたm行m列の2次元行列データ(Y,X)のメッシュである。図31(A)には、地図データの分割処理後、はじめて識別情報が付与されたメッシュ3100を示す。すなわち、図31(A)に示すメッシュ3100は、図11に示すメッシュと同一である。
<Example of expansion / contraction treatment>
FIG. 31 is an explanatory diagram showing an example of the closing process by the navigation device. FIG. 31A to FIG. 31C are meshes of two-dimensional matrix data (Y, X) of m rows and m columns in which identification information is assigned to each region. FIG. 31A shows a
また、図31(B)には、図31(A)に示すメッシュ3100に対してクロージング処理(膨張)をおこなった後のメッシュ3110を示す。図31(C)には、図31(B)に示すメッシュ3110に対してクロージング処理(縮小)をおこなった後のメッシュ3120を示す。図31(A)〜(C)に示すメッシュ3100,3110,3120において、到達可能の識別情報が付与された複数の領域によって生成される車両の到達可能範囲3101,3111,3121を黒く塗りつぶした状態で示す。
FIG. 31B shows a
図31(A)に示すように、識別情報付与後のメッシュ3100には、車両の到達可能範囲3101内に含まれる到達不可能な領域からなる欠損点3102(ハッチングされた到達可能範囲3101内の白地部分)が生じている。欠損点3102は、例えば、図32に示すようにナビゲーション装置200による到達可能地点探索処理の負荷を低減させるためにノードおよびリンクを探索する道路を絞り込んだ場合に、到達可能地点となるノード数が少なくなることにより生じる。
As shown in FIG. 31A, in the
つぎに、図31(B)に示すように、ナビゲーション装置200は、識別情報付与後のメッシュ3100に対してクロージングの膨張処理をおこなう。クロージングの膨張処理では、識別情報付与後のメッシュ3100の、到達可能の識別情報が付与されている領域に隣り合う一の領域の識別情報が、到達可能の識別情報に変更される。これにより、膨張処理前(識別情報付与後)の車両の到達可能範囲3101内に生じていた欠損部3102が消滅する。
Next, as shown in FIG. 31B, the
また、膨張処理前の車両の到達可能範囲3101の最外周の領域に隣り合うすべての領域の識別情報が、到達可能な識別情報に変更される。このため、膨張処理後の車両の到達可能範囲3111の外周は、膨張処理をおこなうごとに、膨張処理前の車両の到達可能範囲3101の最外周の各領域の外周を囲むように1ドット分ずつ広がる。
Moreover, the identification information of all the areas adjacent to the outermost area of the
その後、図31(C)に示すように、ナビゲーション装置200は、メッシュ3110に対してクロージングの縮小処理をおこなう。クロージングの縮小処理では、膨張処理後のメッシュ3110の、到達不可能の識別情報が付与されている領域に隣り合う一の領域の識別情報が、到達不可能の識別情報に変更される。
Thereafter, as illustrated in FIG. 31C, the
このため、膨張処理後の車両の到達可能範囲3111の最外周の各領域が、縮小処理がおこなわれるごとに1ドット分ずつ到達不可能な領域となり、膨張処理後の車両の到達可能範囲3111の外周が縮まる。これにより、縮小処理後の車両の到達可能範囲3121の外周は、膨張処理前の車両の到達可能範囲3101の外周とほぼ同様となる。
For this reason, each area on the outermost periphery of the
ナビゲーション装置200は、上述した膨張処理および縮小処理は同じ回数ずつおこなう。具体的には、膨張処理が2回おこなわれた場合、その後の縮小処理も2回おこなわれる。膨張処理と縮小処理との処理回数を等しくすることで、膨張処理によって到達可能の識別情報に変更された車両の到達可能範囲の外周部分のほぼすべての領域の識別情報を、縮小処理によって元の到達不可能の識別情報に変更することができる。このようにして、ナビゲーション装置200は、車両の到達可能範囲内の欠損点3102を除去し、かつ外周を明瞭に表示可能な車両の到達可能範囲3121を生成することができる。
The
より具体的には、ナビゲーション装置200は、次のようにクロージング処理をおこなう。図32は、ナビゲーション装置によるクロージング処理の一例を模式的に示す説明図である。図32(A)〜図32(C)には、各領域にそれぞれ識別情報が付与されたh行h列の2次元行列データ(Y,X)のメッシュを一例として示す。
More specifically, the
図32(A)は、識別情報付与後のメッシュ3200である。図32(B)は、図32(A)に対するクロージング処理(膨張)後のメッシュ3210である。図32(C)は、図32(B)に対するクロージング処理(縮小)後のメッシュ3220である。図32(A)〜図32(C)のメッシュ3200,3210,3220には、到達可能の識別情報が付与された領域3201,3202をそれぞれ異なるハッチングで図示する。
FIG. 32A shows a
図32(A)に示すように、識別情報付与後のメッシュ3200には、c行f列、f行c列およびg行f列の領域3201に到達可能の識別情報が付与されている。図32(A)では、膨張処理後および縮小処理後における識別情報の変化が明確となるように、到達可能の識別情報が付与された各領域3201を離れた状態で配置している。
As shown in FIG. 32A, the identification information that can reach the
ナビゲーション装置200は、このような識別情報付与後のメッシュ3200に対して、クロージングの膨張処理をおこなう。具体的には、図32(B)に示すように、ナビゲーション装置200は、c行f列の領域3201の左下、下、右下、右、右上、上、左上、左に隣り合う8つの領域(b行e列〜b行g列、c行e列、c行g列およびd行e列〜d行g列)3202の識別情報を、到達不可能の識別情報から到達可能の識別情報に変更する。
The
また、ナビゲーション装置200は、c行f列の領域3201に対しておこなった処理と同様に、f行c列およびg行f列の領域3201においても隣り合う8つの領域3202の識別情報を到達可能の識別情報に変更する。このため、車両の到達可能範囲3211は、領域3202の識別情報が到達可能の識別情報に変更された分だけ、識別情報付与後のメッシュ3200における車両の到達可能範囲よりも広がる。
In addition, the
つぎに、ナビゲーション装置200は、膨張処理後のメッシュ3210に対して、クロージングの縮小処理をおこなう。具体的には、図32(C)に示すように、ナビゲーション装置200は、到達不可能の識別情報が付与された領域(膨張処理後のメッシュ3210の白地部分)に隣り合うb行e列〜b行g列、c行e列、c行g列およびd行e列〜d行g列の8つの領域3202の識別情報を到達不可能の識別情報に変更する。
Next, the
また、ナビゲーション装置200は、b行e列〜b行g列、c行e列、c行g列およびd行e列〜d行g列の8個の領域902に対しておこなった処理と同様に、到達不可能の識別情報が付与された領域に隣り合うe行b列〜e行d列、f行b列、f行d列〜f行g列、g行b列〜g行e列、g行g列、h行e列およびh行g列の15個の領域3202の識別情報を到達不可能の識別情報に変更する。
Further, the
これにより、図32(C)に示すように、縮小処理後のメッシュ3220は、識別情報付与後のメッシュ3200と同様に、到達可能の識別情報が付与された3つの領域3201と、縮小処理後においても到達可能の識別情報が付与されたままの状態で残る1つの領域3202からなる車両の到達可能範囲3221が生成される。このように、膨張処理時に到達可能の識別情報が付与され、かつ縮小処理後に到達可能の識別情報が付与された状態で残る領域3202によって、識別情報付与後のメッシュ3200の到達可能範囲内に生じていた欠損点が消滅する。
Thus, as shown in FIG. 32C, the
<ナビゲーション装置200における識別情報付与例・その2>
ナビゲーション装置200は、2次元行列データ(Y,X)のメッシュに対してオープニング処理(縮小処理後に膨張処理をおこなう処理)をおこない、外周を明瞭に表示可能な車両の到達可能範囲を生成してもよい。具体的には、ナビゲーション装置200は、次のようにオープニング処理をおこなう。
<Example of Identification Information Assignment in Navigation Device 200-
The
図33は、ナビゲーション装置によるオープニング処理の一例を示す説明図である。図33(A)〜図33(C)は、各領域にそれぞれ識別情報が付与されたm行m列の2次元行列データ(Y,X)のメッシュである。図33(A)には、識別情報付与後のメッシュ3300を示す。図33(B)には、図33(A)に対するオープニング処理(縮小)後のメッシュ1010を示す。また、図33(C)には、図33(B)に対するオープニング処理(膨張)後のメッシュ3320を示す。図33(A)〜図33(C)に示すメッシュ3300,3310,3320おいて、到達可能の識別情報が付与された複数の領域によって生成される車両の到達可能範囲3301,3311,3321を黒く塗りつぶした状態で示す。
FIG. 33 is an explanatory diagram showing an example of the opening process by the navigation device. 33A to 33C are meshes of two-dimensional matrix data (Y, X) of m rows and m columns in which identification information is given to each region. FIG. 33A shows a
図33(A)に示すように、識別情報付与後のメッシュ3300における車両の到達可能範囲3301の外周に孤立点3302が多く生じている場合、識別情報付与後のメッシュ3300に対してオープニング処理をおこなうことで、孤立点3302を除去することができる。具体的には、図33(B)に示すように、ナビゲーション装置200は、識別情報付与後のメッシュ3300に対してオープニングの縮小処理をおこなう。
As shown in FIG. 33A, when many
オープニングの縮小処理では、識別情報付与後のメッシュ3300の、到達不可能の識別情報が付与されている領域に隣り合う一の領域の識別情報が、到達不可能の識別情報に変更される。これにより、縮小処理前(識別情報付与後)の車両の到達可能範囲3301付近に生じていた孤立点3302が除去される。
In the opening reduction process, the identification information of one area adjacent to the area to which the unreachable identification information of the
このため、識別情報付与後の車両の到達可能範囲3301の最外周の各領域が、縮小処理がおこなわれるごとに1ドット分ずつ到達不可能な領域となり、識別情報付与後の車両の到達可能範囲3301の外周が縮まる。また、識別情報付与後の車両の到達可能範囲3301に生じていた孤立点3302が除去される。
For this reason, each area on the outermost periphery of the
その後、図33(C)に示すように、ナビゲーション装置200は、メッシュ3310に対してオープニングの膨張処理をおこなう。オープニングの膨張処理では、縮小処理後のメッシュ3310の、到達不可能の識別情報が付与されている領域に隣り合う一の領域の識別情報が、到達可能の識別情報に変更される。このため、膨張処理後の車両の到達可能範囲3321の外周は、膨張処理をおこなうごとに、縮小処理後の車両の到達可能範囲3311の最外周の各領域の外周を囲むように1ドット分ずつ広がる。
Thereafter, as shown in FIG. 33C, the
ナビゲーション装置200は、オープニング処理においても、クロージング処理と同様に膨張処理および縮小処理は同じ回数ずつおこなう。このように膨張処理と縮小処理との処理回数を等しくすることで、縮小処理によって縮まった車両の到達可能範囲3311の外周を広げ、縮小処理後の車両の到達可能範囲3321の外周を縮小処理前の車両の到達可能範囲3301の外周に戻すことができる。このようにして、ナビゲーション装置200は、孤立点3302が生じず、かつ外周を明瞭に表示可能な車両の到達可能範囲3321を生成することができる。
In the opening process, the
<ナビゲーション装置200における画像処理>
図34は、ナビゲーション装置200による画像処理の手順の一例を示すフローチャートである。図18と同一ステップには同一ステップ番号を付し、その説明を省略する。
<Image Processing in
FIG. 34 is a flowchart illustrating an example of an image processing procedure performed by the
メッシュ生成処理(ステップS1804)において領域群を生成したあと、生成した領域群をコピーし、2つの処理に分岐する。一方は、実施の形態1と同等、連結処理(ステップS1805)と識別情報変更処理(ステップS1806)とを実行する。その後、図30の(D)に示したように、ナビゲーション装置200は、膨張収縮処理を実行して(ステップS3407)、ステップS3410に移行する。上述したように、膨張収縮処理(ステップS3407)は省略してもよい。
After the area group is generated in the mesh generation process (step S1804), the generated area group is copied and branched to two processes. One is the same as in the first embodiment, and executes the connection process (step S1805) and the identification information change process (step S1806). Thereafter, as shown in FIG. 30D, the
また、他方の分岐では、ナビゲーション装置200は、探索元領域および探索先領域に識別情報「1」を付与し、残余のメッシュに識別情報「0」を付与する(ステップS3408)。そして、ナビゲーション装置200は、ステップS3408において識別情報が付与された領域群に対し、膨張収縮処理を実行して(ステップS3409)、ステップS3410に移行する。
In the other branch,
ステップS3410では、ナビゲーション装置200は、膨張収縮処理(ステップS3407)の処理結果である領域群と、膨張収縮処理(ステップS3409)の処理結果である領域群との合成処理を実行する(ステップS3410)。合成処理(ステップS3410)では、ナビゲーション装置200は、同一位置のメッシュどうしの識別情報の論理積をとる。これにより、膨張収縮処理により発生した余分な領域を除去することができる。このあと、ナビゲーション装置200は、表示処理(ステップS1807)を実行することにより、本フローチャートによる処理を終了する。
In step S3410, the
<判定部306による連結判定の一例>
実施の形態2では、膨張収縮処理が実行されるため、膨張収縮範囲を想定した上で、連結判定が実行される。具体的には、実施の形態1では、同一領域に探索元地点と探索先地点が存在する場合や、隣接しあう一方の領域に探索元地点、他方の領域に探索先地点が存在する場合には、探索元領域と探索先領域との間を連結する領域(リンクに重複する領域)が存在しないものとして扱っていた。
<An example of connection determination by the
In the second embodiment, since the expansion / contraction process is executed, the connection determination is executed after assuming the expansion / contraction range. Specifically, in the first embodiment, when the search source point and the search destination point exist in the same region, or when the search source point exists in one adjacent region and the search destination point exists in the other region. Has been treated as a region in which the search source region and the search destination region are linked (region overlapping the link) does not exist.
図35は、連結判定例を示す説明図である。(A)は、1回分の膨張範囲を示している。1回の膨張による膨張範囲は中心領域の隣接8領域となる。(B)は、2回分の膨張範囲を示している。1回目の膨張による膨張範囲は中心領域の隣接8領域となり、2回目の膨張による膨張範囲は、1回目の膨張による隣接8領域に隣接する隣接16領域となる。 FIG. 35 is an explanatory diagram of a connection determination example. (A) has shown the expansion | swelling range for 1 time. The expansion range by one expansion is eight regions adjacent to the central region. (B) shows the expansion range for two times. The expansion range due to the first expansion is the adjacent 8 regions of the central region, and the expansion range due to the second expansion is the adjacent 16 regions adjacent to the adjacent 8 regions due to the first expansion.
例えば、膨張収縮がN回繰り返されると、領域の大きさを1とすると、√(2×(2N+1))以内の領域同士は、膨張収縮により必ず連結される。したがって、√(2×(2N+1))以内であれば連結する必要がない。したがって、1回の膨張範囲が隣接8領域の場合は、図24や図28に示した連結処理(ステップS1805)のS2406,S2806の所定距離を√(2×(2N+1))に設定すればよい。したがって、(A)の場合は、1回分の膨張範囲を示しているためN=1であり、(B)の場合は、2回分の膨張範囲を示しているためN=2である。 For example, if expansion and contraction are repeated N times, assuming that the size of the region is 1, regions within √ (2 × (2N + 1)) are always connected by expansion and contraction. Therefore, it is not necessary to connect within √ (2 × (2N + 1)). Accordingly, when the one expansion range is the adjacent eight regions, the predetermined distance of S2406 and S2806 in the connection process (step S1805) shown in FIGS. 24 and 28 may be set to √ (2 × (2N + 1)). . Therefore, in the case of (A), N = 1 because it indicates the expansion range for one time, and in the case of (B), N = 2 because it indicates the expansion range for two times.
(実施の形態3)
実施の形態3は、実施の形態1,2で説明した画像処理装置300を、画像処理システムとした場合の例である。
(Embodiment 3)
The third embodiment is an example in which the
図36は、実施の形態3にかかる画像処理装置300の機能的構成の一例を示すブロック図である。図36において、画像処理システム3600は、サーバ3610、端末3620によって構成される。実施の形態3にかかる画像処理システム3600は、実施の形態1の画像処理装置300の機能をサーバ3610および端末3620に備える。
FIG. 36 is a block diagram of an example of a functional configuration of the
サーバ3610は、移動体に搭載された端末3620によって表示部310に表示させる情報を生成する。具体的には、サーバ3610は、移動体の到達可能範囲に関する情報を検出し端末3620に送信する。端末3620は、移動体に搭載されても構わないし、携帯端末として移動体の中で利用されても構わないし、携帯端末として移動体の外で利用されても構わない。そして、端末3620は、サーバ3610から移動体の到達可能範囲に関する情報を受信する。
The
図36において、サーバ3610は、算出部302、探索部303、分割部304、付与部305、判定部306、検出部307、サーバ受信部3611、サーバ送信部3612によって構成される。端末3620は、取得部301、表示制御部308308、端末受信部3621、端末送信部3622によって構成される。なお、図36に示す画像処理システム3600においては、図1に示した画像処理装置300と同一の構成部に同一の符号を付し、説明を省略する。
36, the
サーバ3610において、サーバ受信部3611は、端末3620から送信された情報を受信する。具体的には、例えば、サーバ受信部3611は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された端末3620からの移動体に関する情報を受信する。移動体に関する情報とは、移動体の現在地点に関する情報、および、移動体の現在地点において移動体が保有するエネルギー量である初期保有エネルギー量に関する情報である。サーバ受信部3611によって受信された情報は、算出部302で参照される情報である。
In
サーバ送信部3612は、付与部305によって移動体が到達可能であることを識別する到達可能の識別情報が付与された地図情報100が分割されてなる複数の領域を移動体の到達可能範囲として、端末3620に送信する。具体的には、例えば、サーバ送信部3612は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された端末3620に情報を送信する。
The
端末3620は、例えば、携帯端末の情報通信網や自装置に備えられた通信部(不図示)を介して通信可能な状態で、サーバ3610と接続されている。
The terminal 3620 is connected to the
端末3620において、端末受信部3621は、サーバ3610からの情報を受信する。具体的には、端末受信部3621は、複数の領域に分割され、かつ当該領域のそれぞれに、移動体の到達可能地点に基づいて到達可能または到達不可能の識別情報が付与された地図情報100を受信する。より具体的には、例えば、端末受信部3621は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続されたサーバ3610から情報を受信する。
In terminal 3620,
端末送信部3622は、取得部301に取得された移動体に関する情報をサーバ3610に送信する。具体的には、例えば、端末送信部3622は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続されたサーバ3610に移動体に関する情報を送信する。
The
つぎに、実施の形態3にかかる画像処理システム3600による画像処理について説明する。画像処理システム3600による画像処理は、実施の形態1にかかる画像処理装置300とほぼ同一であるため、実施の形態1との差異について説明する。
Next, image processing by the
画像処理システム3600による画像処理は、実施の形態1にかかる画像処理装置300による画像処理のうち、推定エネルギー消費量算出処理、到達可能地点探索処理、識別情報付与処理、をサーバ3610がおこなう。具体的には、端末3620は、取得部301による情報の取得処理をおこない、取得した情報をサーバ3610に送信する。
In the image processing by the
つぎに、サーバ3610は、端末3620からの情報を受信する。つぎに、サーバ3610は、端末3620から受信した情報に基づいて算出部302〜検出部307の処理をおこない、付与部305から取得した情報を端末3620に送信する。つぎに、端末3620は、サーバ3610からの情報を受信する。そして、端末3620は、サーバ3610から受信した情報に基づいて表示制御部308による表示制御処理をおこない、本フローチャートによる処理を終了する。
Next, the
図37は、実施の形態3にかかる画像処理システムの機能的構成の他の例を示すブロック図である。図37において、画像処理システム3700は、第1サーバ3710、第2サーバ3720、第3サーバ3730、端末3740によって構成される。画像処理システム3700は、実施の形態1の画像処理装置300の算出部302の機能を第1サーバ3710が備え、実施の形態1の画像処理装置300の探索部303の機能を第2サーバ3720が備え、実施の形態1の画像処理装置300の分割部304、付与部305、判定部306、検出部307の機能を第3サーバ3730が備え、実施の形態1の画像処理装置300の取得部301および表示制御部308の機能を端末3740が備える。
FIG. 37 is a block diagram of another example of the functional configuration of the image processing system according to the third embodiment. In FIG. 37, the
図37において、端末3740は、実施の形態2の端末2520と同様の構成を有する。具体的には、端末3740は、取得部301、表示制御部308、端末受信部3741、端末送信部3742によって構成される。端末受信部3741は、実施の形態2の端末受信部2521と同様の構成を有する。端末送信部3742は、実施の形態2の端末送信部2522と同様の構成を有する。第1サーバ3710は、算出部302、第1サーバ受信部3711、第1サーバ送信部3712、によって構成される。
In FIG. 37, terminal 3740 has the same configuration as terminal 2520 of the second embodiment. Specifically, the terminal 3740 includes an
第2サーバ3720は、探索部303、第2サーバ受信部3721、第2サーバ送信部3722、によって構成される。第3サーバ3730は、分割部304、付与部305、判定部306、検出部307、第3サーバ受信部3731、第3サーバ送信部3732、によって構成される。図37に示す画像処理システム3700においては、図1に示した画像処理装置300および図36に示した画像処理システム3600と同一の構成部に同一の符号を付し、説明を省略する。
The second server 3720 includes a
第1サーバ3710において、第1サーバ受信部3711は、端末3740から送信された情報を受信する。具体的には、例えば、第1サーバ受信部3711は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された端末3740の端末送信部3742からの情報を受信する。第1サーバ受信部3711によって受信された情報は、算出部302で参照される情報である。
In the
第1サーバ送信部3712は、算出部302によって算出された情報を第2サーバ受信部3721に送信する。具体的には、第1サーバ送信部3712は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された第2サーバ受信部3721に情報を送信してもよいし、有線で接続された第2サーバ受信部3721に情報を送信してもよい。
The first
第2サーバ3720において、第2サーバ受信部3721は、端末送信部3742および第1サーバ送信部3712によって送信された情報を受信する。具体的には、例えば、第2サーバ受信部3721は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された第1サーバ送信部3712および端末送信部3742からの情報を受信する。第2サーバ受信部3721は、有線で接続された第1サーバ送信部3712からの情報を受信してもよい。第2サーバ受信部3721によって受信された情報は、探索部303で参照される情報である。
In second server 3720, second server reception unit 3721 receives information transmitted by
第2サーバ送信部3722は、探索部303によって探索された情報を第3サーバ受信部3731に送信する。具体的には、例えば、第2サーバ送信部3722は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された第3サーバ受信部3731に情報を送信してもよいし、有線で接続された第3サーバ受信部3731に情報を送信してもよい。
The second
第3サーバ3730において、第3サーバ受信部3731は、端末送信部3742および第2サーバ送信部3722によって送信された情報を受信する。具体的には、例えば、第3サーバ受信部3731は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された第2サーバ送信部3722および端末送信部3742からの情報を受信してもよい。第3サーバ受信部3731は、有線で接続された第2サーバ送信部3722からの情報を受信してもよい。第3サーバ受信部3731によって受信された情報は、分割部304で参照される情報である。
In
第3サーバ送信部3732は、付与部305によって生成された情報を端末受信部3741に送信する。具体的には、例えば、第3サーバ送信部3732は、公衆回線網や携帯電話網、DSRC、LAN、WANなどの通信網に無線を介して接続された端末受信部3741に情報を送信する。
The third
つぎに、実施の形態3にかかる画像処理システム3700による画像処理について説明する。画像処理システム3700による画像処理は、実施の形態1にかかる画像処理装置300とほぼ同一であるため、図18のフローチャートを利用して実施の形態1との差異について説明する。
Next, image processing by the
画像処理システム3700による画像処理は、実施の形態1にかかる画像処理装置300による画像処理のうち、推定エネルギー消費量算出処理を第1サーバ3710がおこない、到達可能地点探索処理を第2サーバ3720がおこない、識別情報付与処理を第3サーバ3730がおこなう。図18のフローチャートにおいて、端末3740は、ステップS1801の処理をおこない、ステップS1801で取得した情報を第1サーバ3710に送信する。
In the image processing by the
つぎに、第1サーバ3710は、端末3740からの情報を受信する。つぎに、第1サーバ3710は、端末3740から受信した情報に基づいてステップS1802,S1803の処理をおこない、ステップS1803で算出した情報を第2サーバ3720に送信する。つぎに、第2サーバ3720は、第1サーバ3710からの情報を受信する。つぎに、第2サーバ3720は、第1サーバ3710から受信した情報に基づいてステップS1804の処理をおこない、ステップS1804で探索した情報を第3サーバ3730に送信する。
Next, the
つぎに、第3サーバ3730は、第2サーバ3720からの情報を受信する。つぎに、第3サーバ3730は、第2サーバ3720からの情報に基づいてステップS1805,S1806の処理をおこない、ステップS1806で生成した情報を端末3740に送信する。つぎに、端末3740は、第3サーバ3730からの情報を受信する。そして、端末3740は、第3サーバ3730から受信した情報に基づいてステップS1807をおこない、本フローチャートによる処理を終了する。
Next, the
以上説明したように、実施の形態3にかかる画像処理システム3600,3700および画像処理方法は、実施の形態1にかかる画像処理装置300および画像処理方法と同様の効果を得ることができる。
As described above, the
(実施の形態4)
実施の形態4は、実施の形態1〜3におけるシステム構成の一例を示す。図38は、実施の形態4のシステム構成の一例を示す説明図である。実施の形態4では、車両に搭載されたナビゲーション装置3810を端末3620とし、サーバ3820をサーバ3610とする画像処理システム3800において、本発明を適用した場合の一例について説明する。画像処理システム3800は、車両3830に搭載されたナビゲーション装置3810、サーバ3820、ネットワーク3840によって構成される。
(Embodiment 4)
The fourth embodiment shows an example of a system configuration in the first to third embodiments. FIG. 38 is an explanatory diagram of an example of a system configuration according to the fourth embodiment. In
ナビゲーション装置3810は、車両3830に搭載されている。ナビゲーション装置3810は、サーバ3820に車両の現在地点の情報および初期保有エネルギー量に関する情報を送信する。また、ナビゲーション装置3810は、サーバ3820から受信した情報をディスプレイに表示してユーザに報知する。サーバ3820は、ナビゲーション装置3810から車両の現在地点の情報および初期保有エネルギー量に関する情報を受信する。サーバ3820は、受信した車両情報に基づいて、車両3830の到達可能範囲に関する情報を生成する。
The
サーバ3820およびナビゲーション装置3810のハードウェア構成は、実施例1のナビゲーション装置200のハードウェア構成と同一である。また、ナビゲーション装置3810は、車両情報をサーバ3820に送信する機能と、サーバ3820からの情報を受信してユーザに報知する機能に該当するハードウェア構成のみを備えていればよい。
The hardware configuration of the
また、画像処理システム3800は、車両に搭載されたナビゲーション装置3810を実施の形態3の端末3740とし、サーバ3820の機能構成を実施の形態3の第1〜3サーバ3710〜3730に分散させた構成してもよい。
Further, the
以上説明したように、本実施の形態の画像処理装置および画像処理方法は、移動体が到達可能な領域にまで領域拡大する膨張処理と、膨張処理により拡大された領域から移動体が到達不可能な領域を除外する収縮処理(以下、あわせて膨張収縮処理)とによる弊害を低減することができる。具体的には、膨張収縮処理に伴うノードの消失や到達可能範囲の狭小化、到達可能範囲の分散化を抑制することができる。また、実施の形態2で示したように、膨張収縮処理を補完的に用いることにより、膨張収縮処理に伴うノードの消失や到達可能範囲の狭小化、到達可能範囲の分散化を高精度に抑制することができる。 As described above, in the image processing apparatus and the image processing method according to the present embodiment, the expansion process for expanding the area to the area where the mobile object can reach, and the mobile object cannot reach from the area expanded by the expansion process. It is possible to reduce the adverse effects caused by the shrinking process (hereinafter referred to as “expansion / shrinking process”) that excludes a region. Specifically, it is possible to suppress the disappearance of the node, the narrowing of the reachable range, and the dispersion of the reachable range due to the expansion / contraction process. In addition, as shown in the second embodiment, by using the expansion / contraction process in a complementary manner, loss of nodes, narrowing of the reachable range, and dispersion of the reachable range accompanying the expansion / contraction process can be suppressed with high accuracy. can do.
また、本実施の形態にかかる画像処理装置および画像処理方法は、道路形状に沿った到達可能領域の抽出作業を背景技術の項で示した方法とは独立して適用することができるため、道路形状に沿った到達可能範囲の抽出方法を自由に選択することもできる。例えば、本実施の形態にかかる画像処理装置および画像処理方法では、道路形状に沿って描画する線の太さを変えたり、線を描画した後で膨張収縮を行うことが可能である。 In addition, the image processing apparatus and the image processing method according to the present embodiment can apply the extraction operation of the reachable area along the road shape independently from the method shown in the background section. It is also possible to freely select a method for extracting a reachable range along the shape. For example, in the image processing apparatus and the image processing method according to the present embodiment, it is possible to change the thickness of a line drawn along a road shape, or to perform expansion / contraction after drawing a line.
また、本実施の形態によれば、海や湖、山脈など移動体の走行不可能な領域を除いた状態で移動体の到達可能範囲を生成することができ、移動体の到達可能範囲を正確に表示することができる。 In addition, according to the present embodiment, it is possible to generate the reachable range of the moving object in a state excluding the area where the moving object cannot travel, such as the sea, the lake, and the mountain range. Can be displayed.
また、探索元領域と探索先領域との間の連結判定を実行することにより、不要な識別情報の付与を抑制することができ、画像処理の高速化を図ることができる。また、探索元地点と探索先地点との間のリンクの方向を検出して、探索フィルタFを変更することにより、識別情報の重複付与を抑制することができ、画像処理の高速化を図ることができる。 In addition, by executing the connection determination between the search source region and the search destination region, it is possible to suppress unnecessary identification information from being added, and to speed up image processing. In addition, by detecting the direction of the link between the search source point and the search destination point and changing the search filter F, it is possible to suppress duplication of identification information and to speed up image processing. Can do.
なお、本実施の形態で説明した画像処理方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。 Note that the image processing method described in this embodiment can be realized by executing a program prepared in advance on a computer such as a personal computer or a workstation. This program is recorded on a computer-readable recording medium such as a hard disk, a flexible disk, a CD-ROM, an MO, and a DVD, and is executed by being read from the recording medium by the computer. The program may be a transmission medium that can be distributed via a network such as the Internet.
300 画像処理装置
301 取得部
302 算出部
303 探索部
304 分割部
305 付与部
306 判定部
307 検出部
308 表示制御部
310 表示部
DESCRIPTION OF
Claims (3)
前記探索手段の探索処理における探索元地点を含む探索元領域と当該探索元地点からの探索先地点を含む探索先領域に対し、膨張収縮処理を実行して得られる第1領域と、前記探索元領域、前記探索先領域、並びに前記探索元領域および前記探索先領域を結ぶリンクに重複する重複領域に基づき得られる第2領域との合成領域を到達可能範囲として表示手段に表示させる表示制御手段を備えることを特徴とする画像処理装置。 Search means for searching for a reachable point based on information on the amount of energy held by the mobile body and an estimated energy consumption amount that is energy consumed when the mobile body travels;
A first region obtained by executing expansion and contraction processing on a search source region including a search source point in the search processing of the search means and a search destination region including the search destination point from the search source point; and the search source Display control means for causing the display means to display a composite area with the second area obtained based on the overlapping area overlapping the area, the search destination area, and the link connecting the search source area and the search destination area as a reachable range An image processing apparatus comprising:
移動体が保有するエネルギー量に関する情報、および前記移動体が走行する際に消費するエネルギーである推定エネルギー消費量に基づいて、到達可能な地点を探索手段により探索する探索工程と、
前記探索工程の処理における探索元地点を含む探索元領域と当該探索元地点からの探索先地点を含む探索先領域に対し、膨張収縮処理を実行して得られる第1領域と、前記探索元領域、前記探索先領域、並びに前記探索元領域および前記探索先領域を結ぶリンクに重複する重複領域に基づき得られる第2領域との合成領域を到達可能範囲として表示手段に表示させる表示制御手段が行う表示制御工程と、
を含むことを特徴とする画像処理方法。 In the image processing method executed by the image processing apparatus,
A search step of searching for a reachable point by search means based on information on the amount of energy held by the mobile body and an estimated energy consumption amount that is energy consumed when the mobile body travels;
A first area obtained by executing expansion and contraction processing on a search source area including a search source point in the process of the search step and a search destination area including a search destination point from the search source point, and the search source area And a display control unit that causes the display unit to display a combined region with the second region obtained based on the search destination region and an overlapping region overlapping the link connecting the search source region and the search destination region as a reachable range. A display control process;
An image processing method comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017171620A JP2017227652A (en) | 2017-09-06 | 2017-09-06 | Image processing device, image processing method, and image processing program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017171620A JP2017227652A (en) | 2017-09-06 | 2017-09-06 | Image processing device, image processing method, and image processing program |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014526679A Division JPWO2014016948A1 (en) | 2012-07-26 | 2012-07-26 | Image processing apparatus, image processing method, and image processing program |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018140774A Division JP2018200319A (en) | 2018-07-26 | 2018-07-26 | Image processing device, image processing method, and image processing program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017227652A true JP2017227652A (en) | 2017-12-28 |
Family
ID=60891606
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017171620A Ceased JP2017227652A (en) | 2017-09-06 | 2017-09-06 | Image processing device, image processing method, and image processing program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017227652A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023238728A1 (en) * | 2022-06-08 | 2023-12-14 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | Information processing method, information processing device and information processing program |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0785397A (en) * | 1993-09-17 | 1995-03-31 | Honda Motor Co Ltd | Display device for electric automobile |
| JPH08271274A (en) * | 1995-03-28 | 1996-10-18 | Mitsubishi Electric Corp | Generation apparatus of travel route |
| JP2003021522A (en) * | 2001-07-09 | 2003-01-24 | Nissan Motor Co Ltd | Information indicator |
| JP2004125553A (en) * | 2002-10-01 | 2004-04-22 | Xanavi Informatics Corp | Map data transmission method, information distribution device, and information terminal |
| JP2008020382A (en) * | 2006-07-14 | 2008-01-31 | Honda Motor Co Ltd | Navigation server, navigation device, navigation program, method for constructing navigation device, server and navigation system |
| JP2008096209A (en) * | 2006-10-10 | 2008-04-24 | Matsushita Electric Ind Co Ltd | Reachable range display device, and reachable range display method and program thereof |
| US20120116670A1 (en) * | 2010-11-09 | 2012-05-10 | Darin Paul Rosekrans | Range marker for a navigation system |
-
2017
- 2017-09-06 JP JP2017171620A patent/JP2017227652A/en not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0785397A (en) * | 1993-09-17 | 1995-03-31 | Honda Motor Co Ltd | Display device for electric automobile |
| JPH08271274A (en) * | 1995-03-28 | 1996-10-18 | Mitsubishi Electric Corp | Generation apparatus of travel route |
| JP2003021522A (en) * | 2001-07-09 | 2003-01-24 | Nissan Motor Co Ltd | Information indicator |
| JP2004125553A (en) * | 2002-10-01 | 2004-04-22 | Xanavi Informatics Corp | Map data transmission method, information distribution device, and information terminal |
| JP2008020382A (en) * | 2006-07-14 | 2008-01-31 | Honda Motor Co Ltd | Navigation server, navigation device, navigation program, method for constructing navigation device, server and navigation system |
| JP2008096209A (en) * | 2006-10-10 | 2008-04-24 | Matsushita Electric Ind Co Ltd | Reachable range display device, and reachable range display method and program thereof |
| US20120116670A1 (en) * | 2010-11-09 | 2012-05-10 | Darin Paul Rosekrans | Range marker for a navigation system |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023238728A1 (en) * | 2022-06-08 | 2023-12-14 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | Information processing method, information processing device and information processing program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6047651B2 (en) | Image processing apparatus and image processing method | |
| WO2014016948A1 (en) | Image processing device and image processing method | |
| WO2013027270A1 (en) | Image processing device, image processing management device, terminal, processing device, and image processing method | |
| WO2014045432A1 (en) | Image processing apparatus and image processing method | |
| JP2017227652A (en) | Image processing device, image processing method, and image processing program | |
| JP2018200319A (en) | Image processing device, image processing method, and image processing program | |
| JP2022070882A (en) | Image processing device, image processing method, and image processing program | |
| JP2019049569A (en) | Image processing device, image processing method and image processing program | |
| WO2014103080A1 (en) | Display control device, display control method, display control program, display control system, display control server, and terminal | |
| JP2017187498A (en) | Image processing device, image processing method and image processing program | |
| JP6058756B2 (en) | Image processing apparatus and image processing method | |
| JP2016006695A (en) | Replenishment facility retrieval device, replenishment facility retrieval method, and replenishment facility retrieval program | |
| JP5819445B2 (en) | Image processing apparatus, image processing management apparatus, terminal, and image processing method | |
| JP2023133418A (en) | Image processing device, image processing method and image processing program | |
| JP5619288B2 (en) | Image processing apparatus, image processing management apparatus, terminal, processing apparatus, and image processing method | |
| WO2013125019A1 (en) | Image processing device and image processing method | |
| JP5816705B2 (en) | Image processing apparatus, image processing management apparatus, terminal, image processing method, and data structure | |
| CN104204728B (en) | Image processing apparatus and image processing method | |
| WO2014038026A1 (en) | Image processing device and image processing method | |
| WO2013114579A1 (en) | Image-processing device, method for processing image, and image-processing program | |
| WO2013105271A1 (en) | Image processing apparatus, image processing management apparatus, terminal, and image processing method | |
| WO2014080535A1 (en) | Display control device, display control method, display control program, display control system, display control server, and terminal | |
| JP2019212314A (en) | Reachable range calculation device, reachable range calculation method, and reachable range calculation program | |
| WO2014068685A1 (en) | Display control device, server device, display control method, display control program and recording medium | |
| JPWO2013125019A1 (en) | Image processing apparatus and image processing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180627 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20181030 |